
Dynamic Behavior of the Net of a Pile–Net-Gapped Enclosure Aquaculture Facility



Abstract
:1. Introduction
2. Methodology
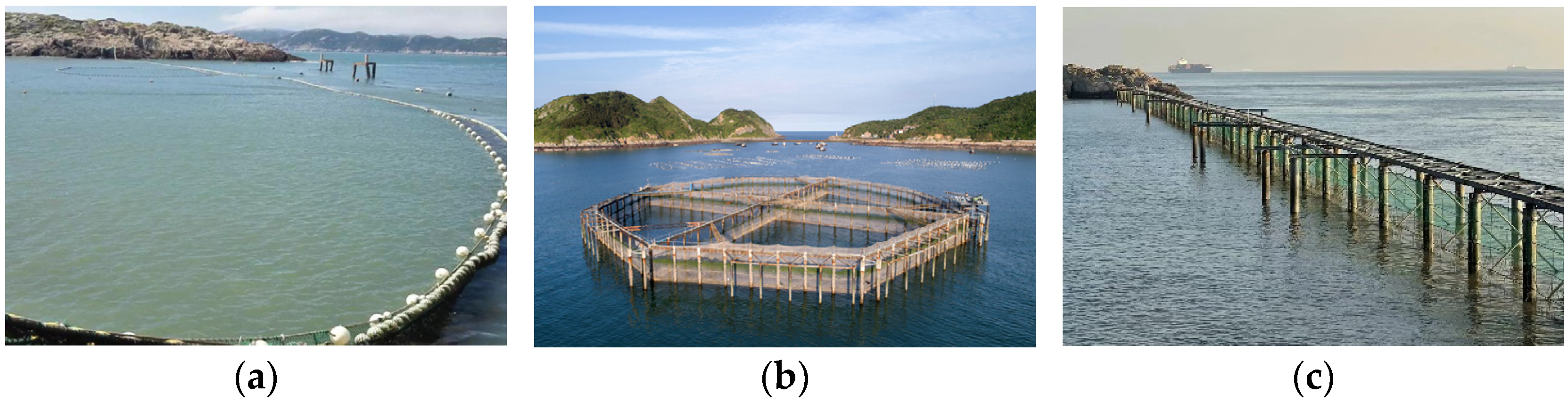
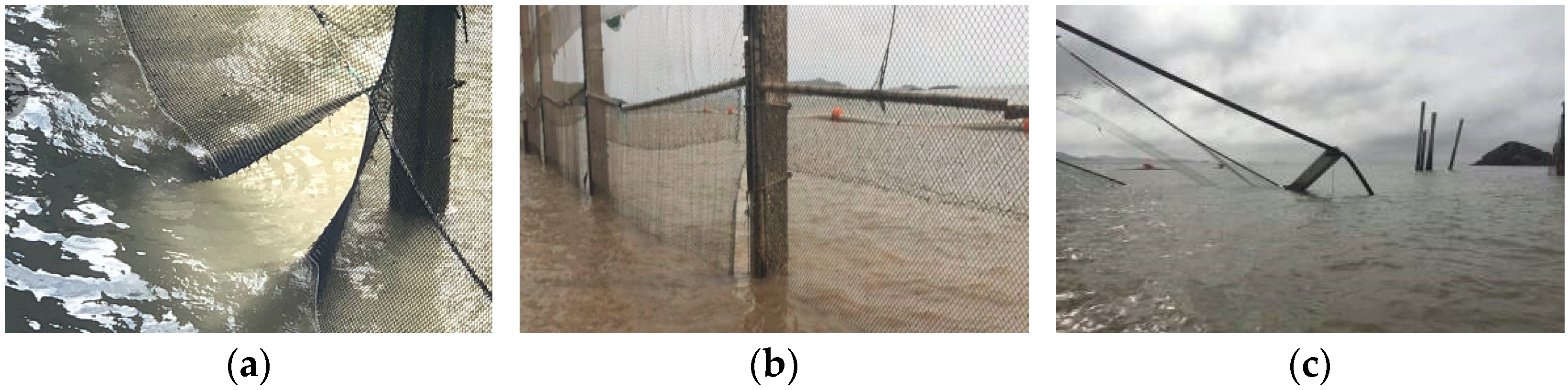
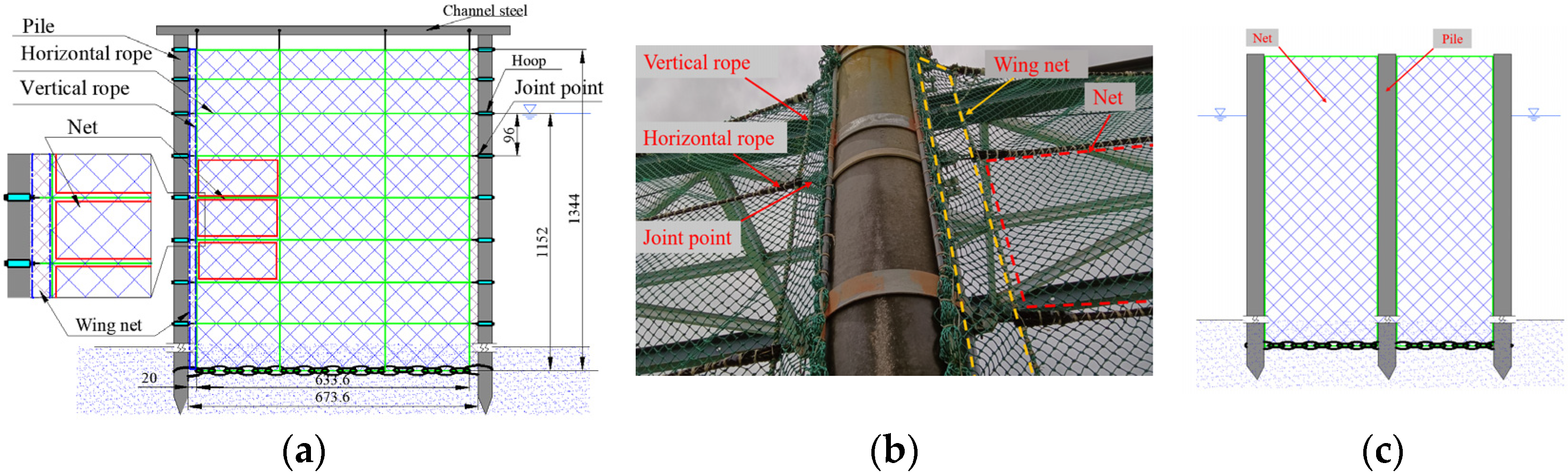
2.1. Pile–Net-Gapped Enclosure Aquaculture Facility
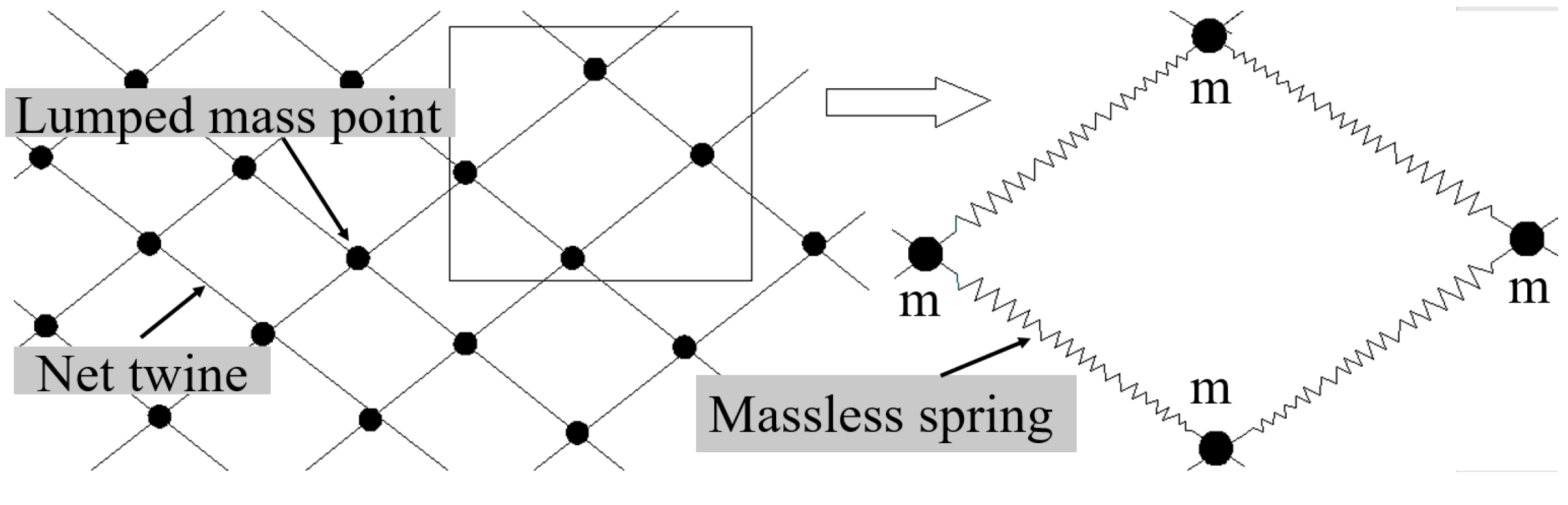
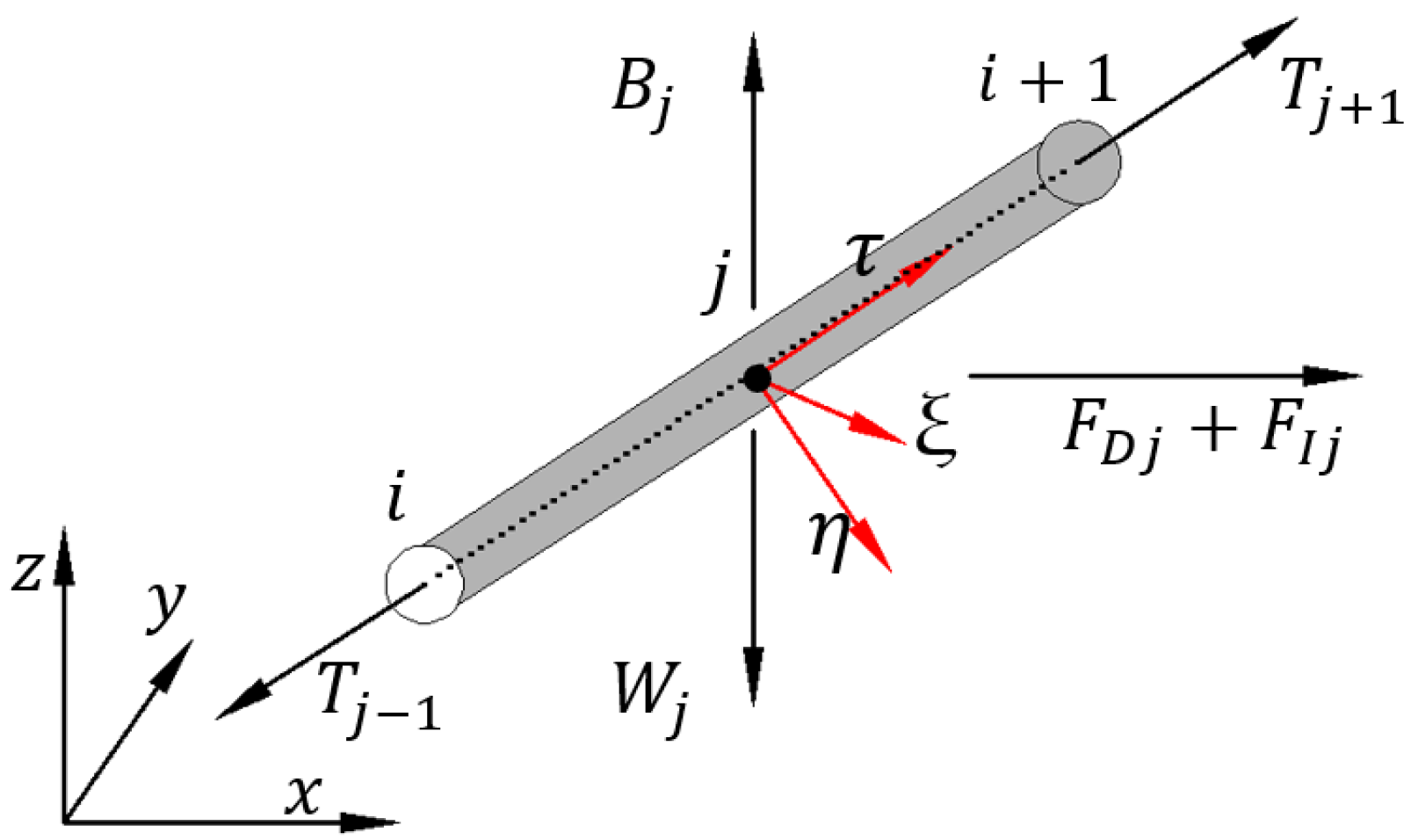
2.2. Numerical Method
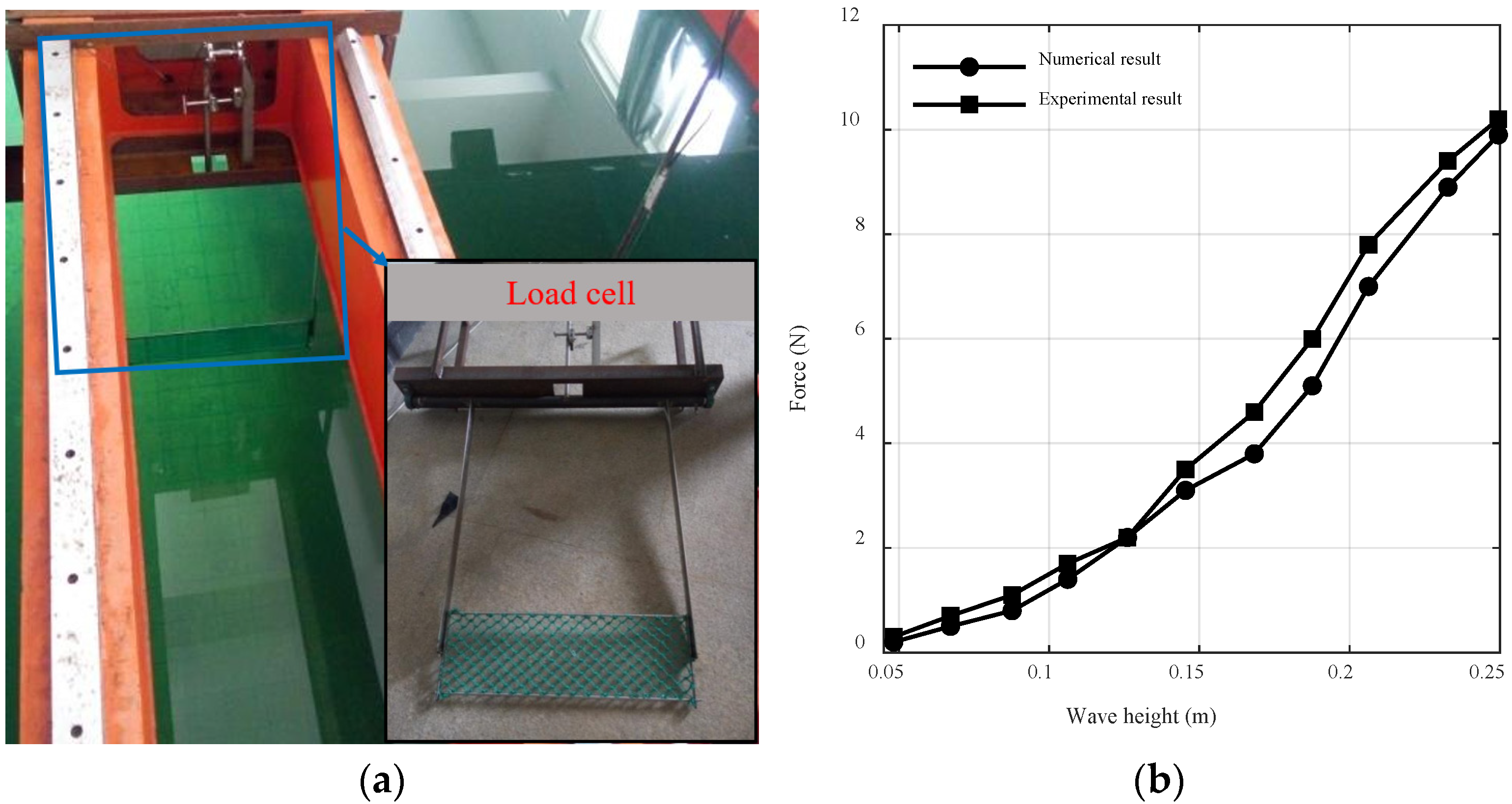
2.3. Model Validation
3. Results
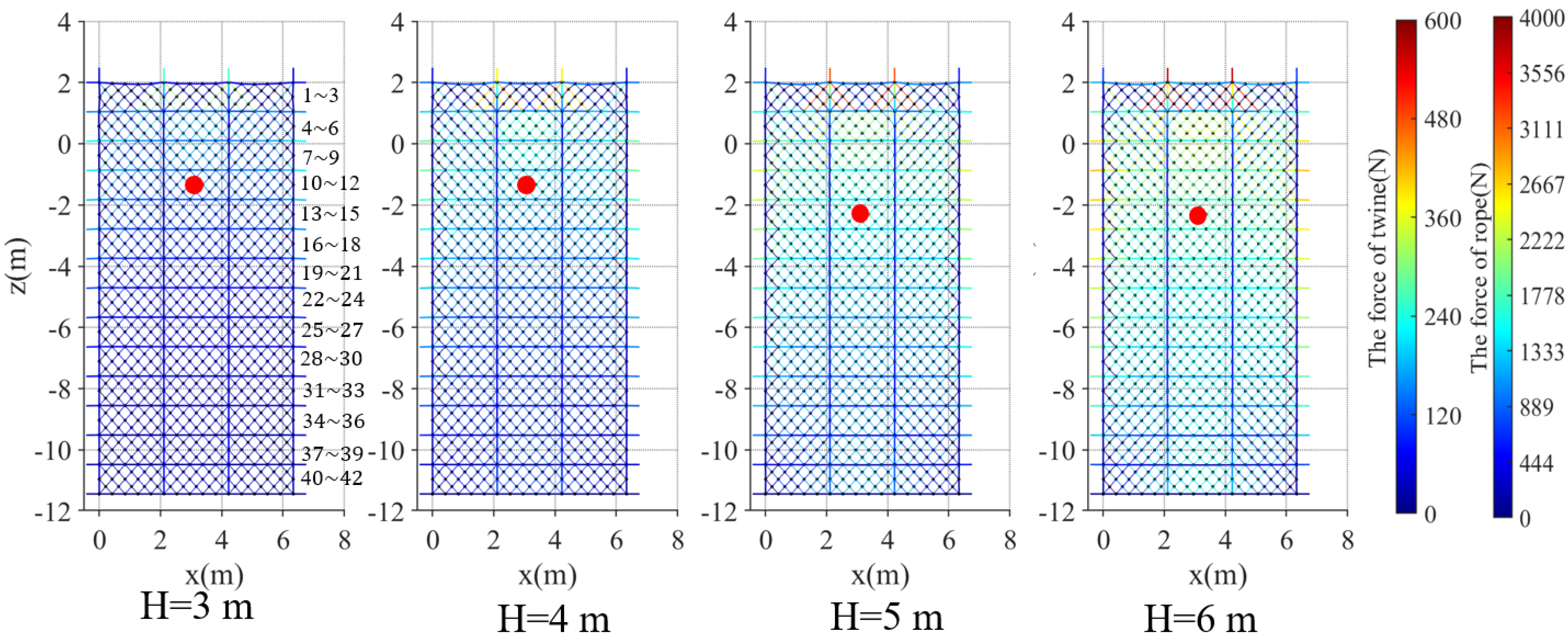
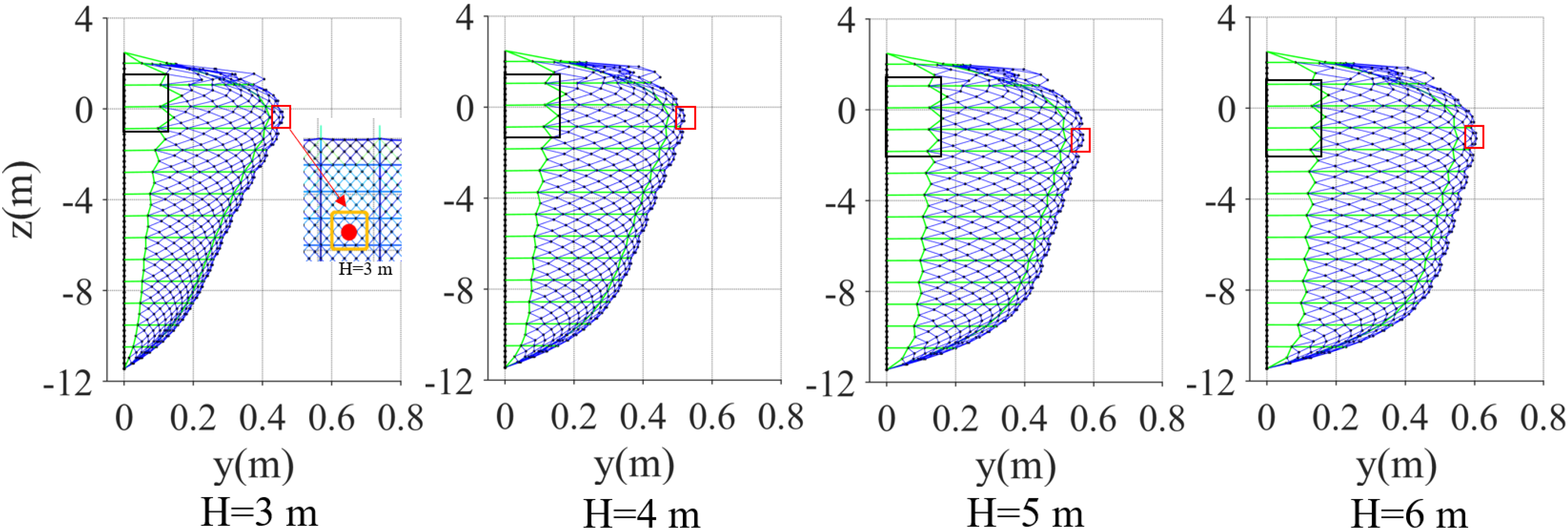
3.1. Influence of Waves on the Net System of a Pile–Net-Gapped Enclosure Aquaculture Facility
3.2. Influence of Currents on the Net System of the Pile–Net-Gapped Enclosure Aquaculture Facility
3.3. Influence of Combined Action of Waves and Currents on the Net System of Pile–Net-Gapped Enclosure Aquaculture Facility
4. Discussion
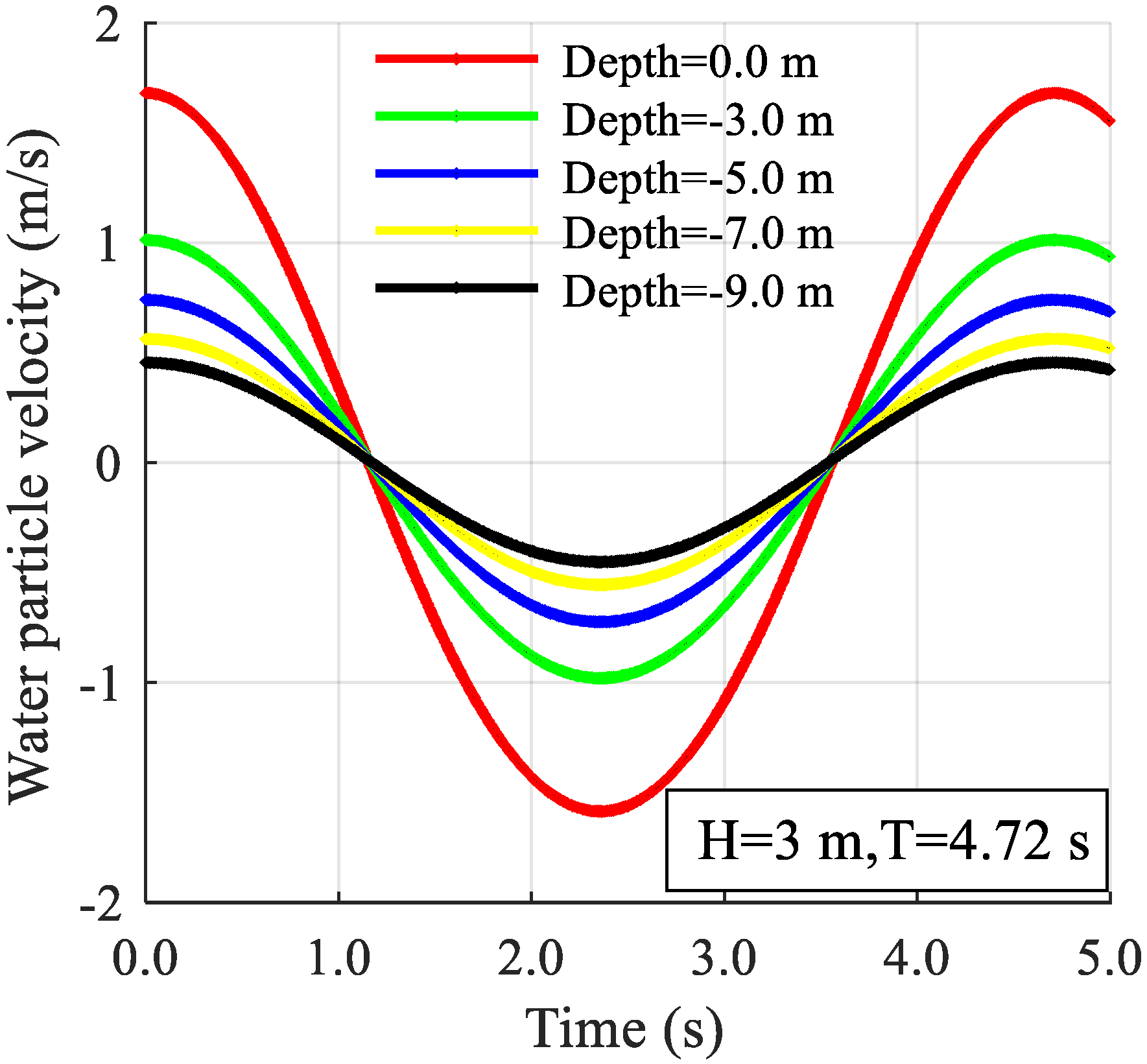
4.1. Effect of Water Particle Velocity at Different Depths on the Dynamics of the Net System of a Pile–Net-Gapped Enclosure Aquaculture Facility
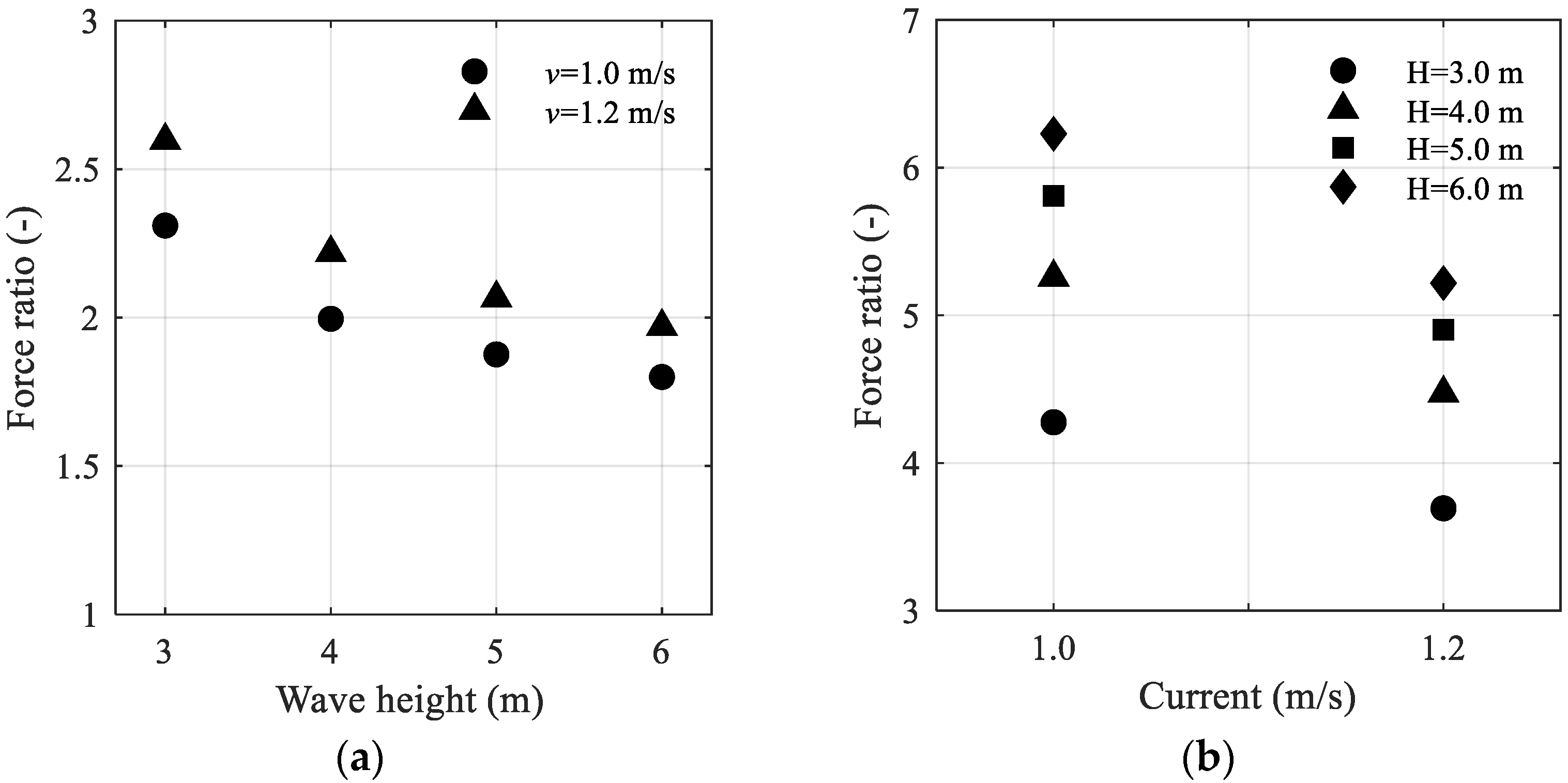
4.2. Comparison of the Results of the Pure Waves, Pure Currents, and Combined Action of Waves and Currents
4.3. Future Prospects
5. Conclusions
- (i)
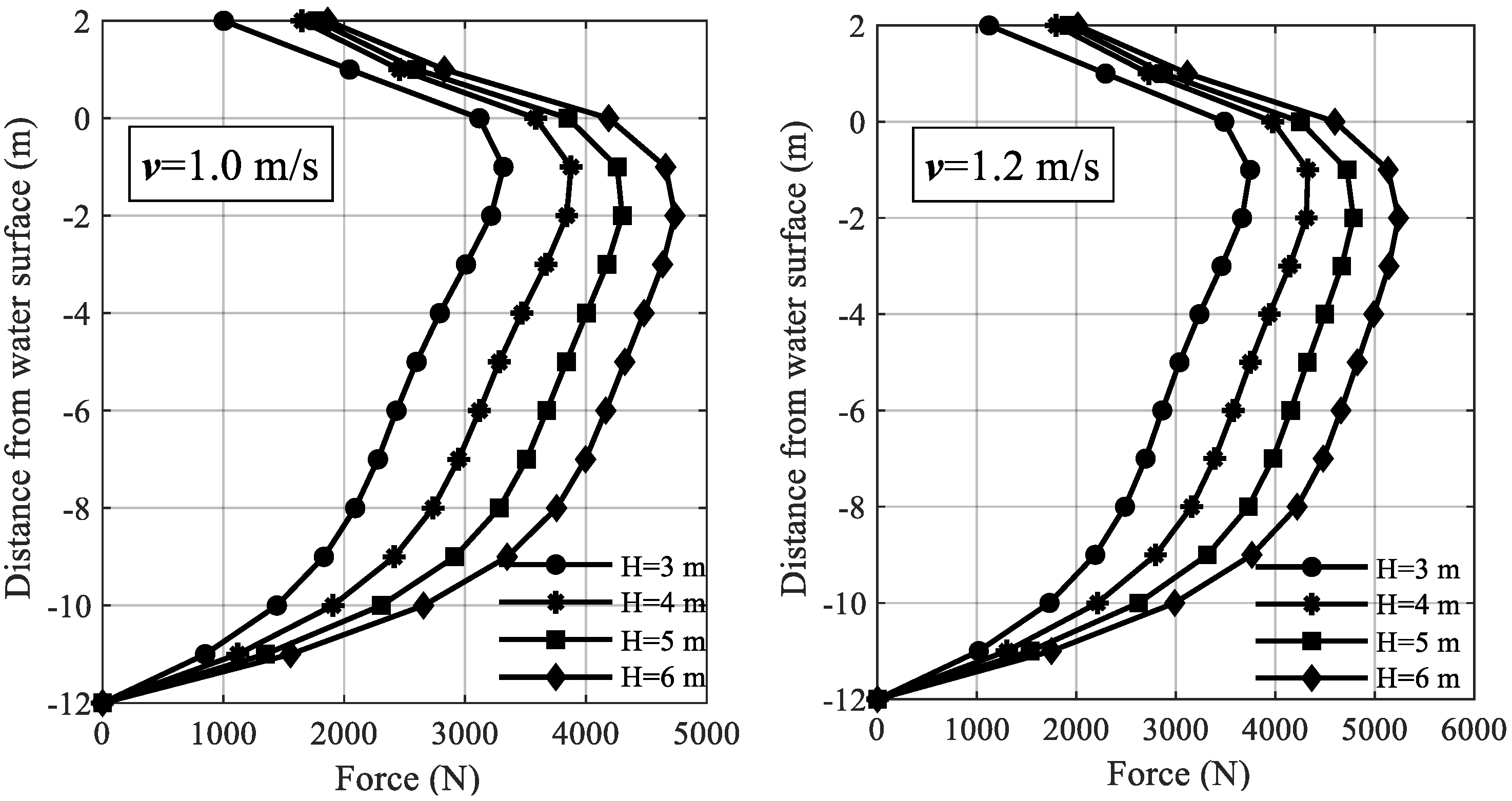
- The force of the net increased rapidly with the increase in wave loads, while the changes in the force regions were quite different: with an increase in wave loads, the greater the force positions of the net changed from regions 1–12 (H = 3 m) to regions 1–21 (H = 6 m). Regions 1–12 were the positions where the force was the greatest, and these regions accounted for more than 60% of the force of the entire net under wave loads;
- (ii)
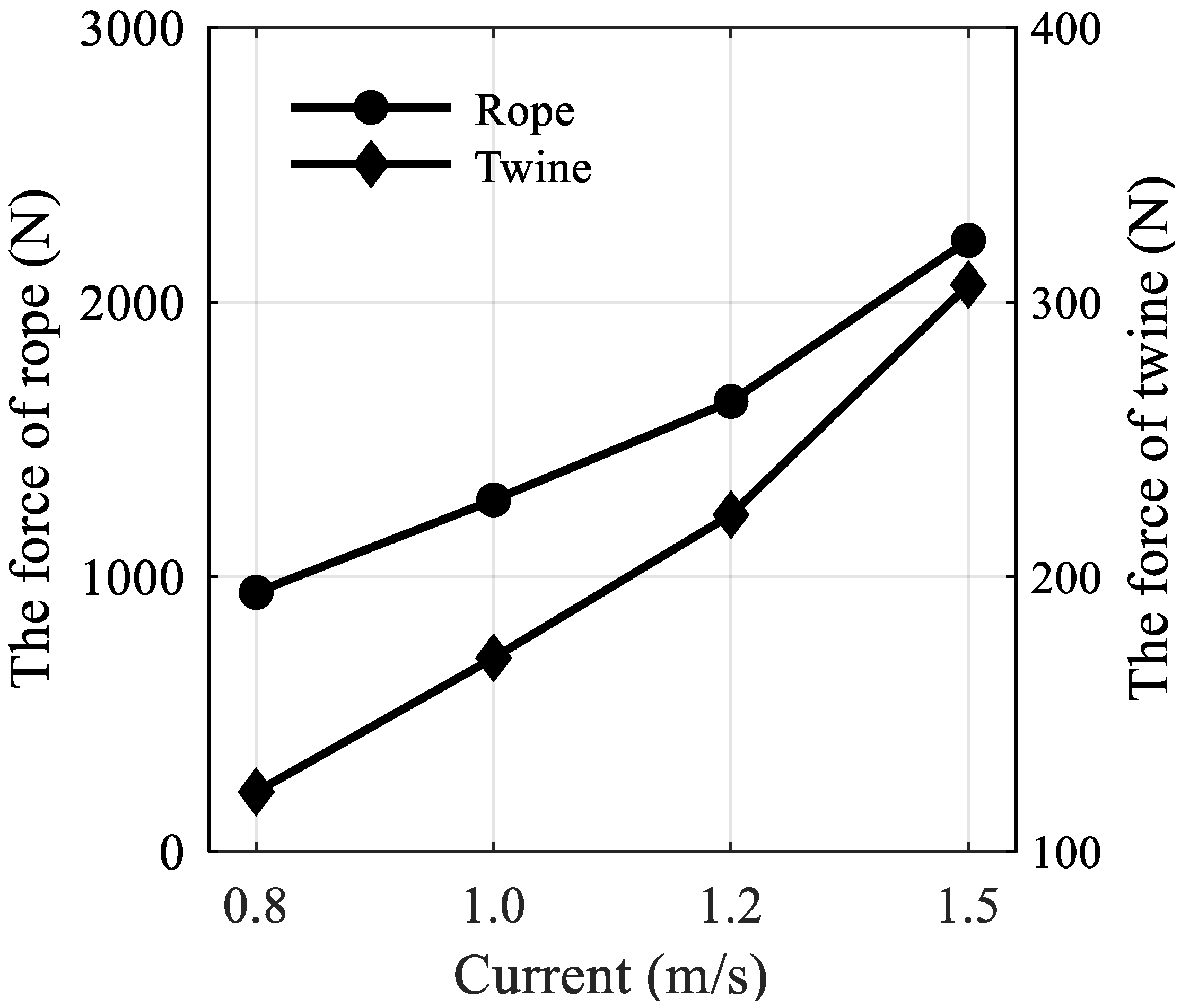
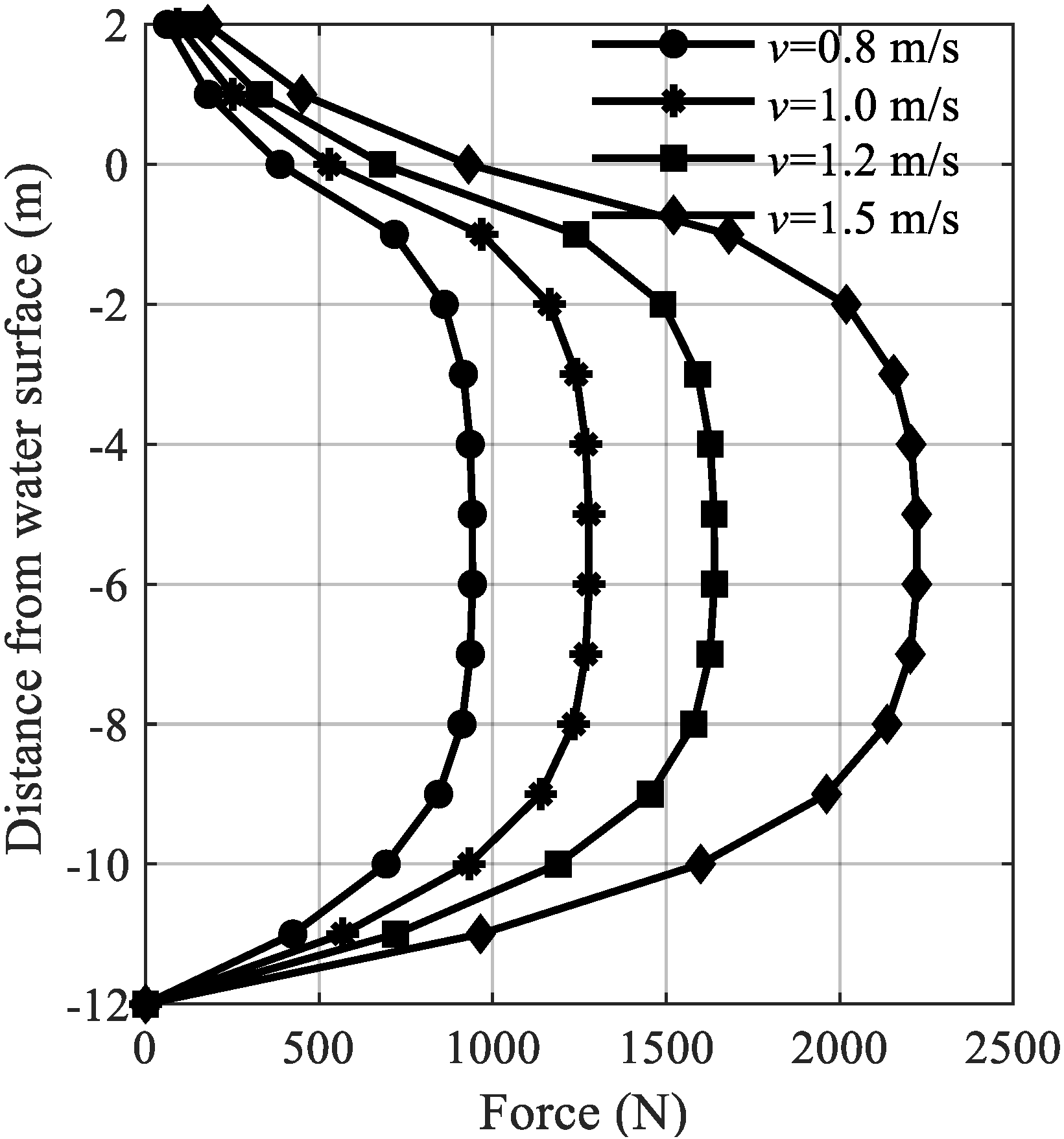
- For pure current loads, the force of the net was uniform, since the energy did not decrease with the increase in water depth. The rope and net twine showed the same mechanical properties below the still-water level. The force and displacement of the net increased at the same rate under the currents that increased uniformly;
- (iii)
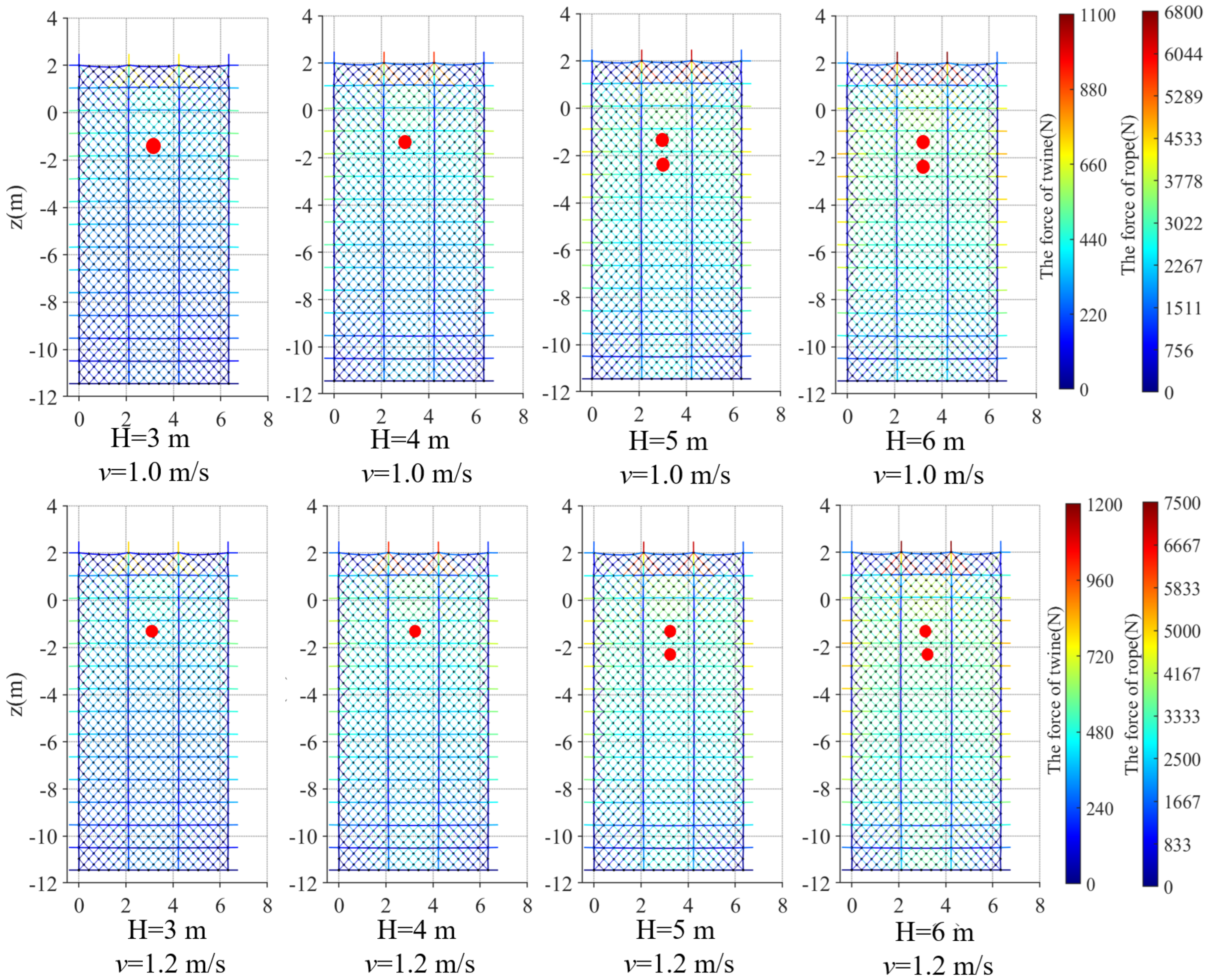
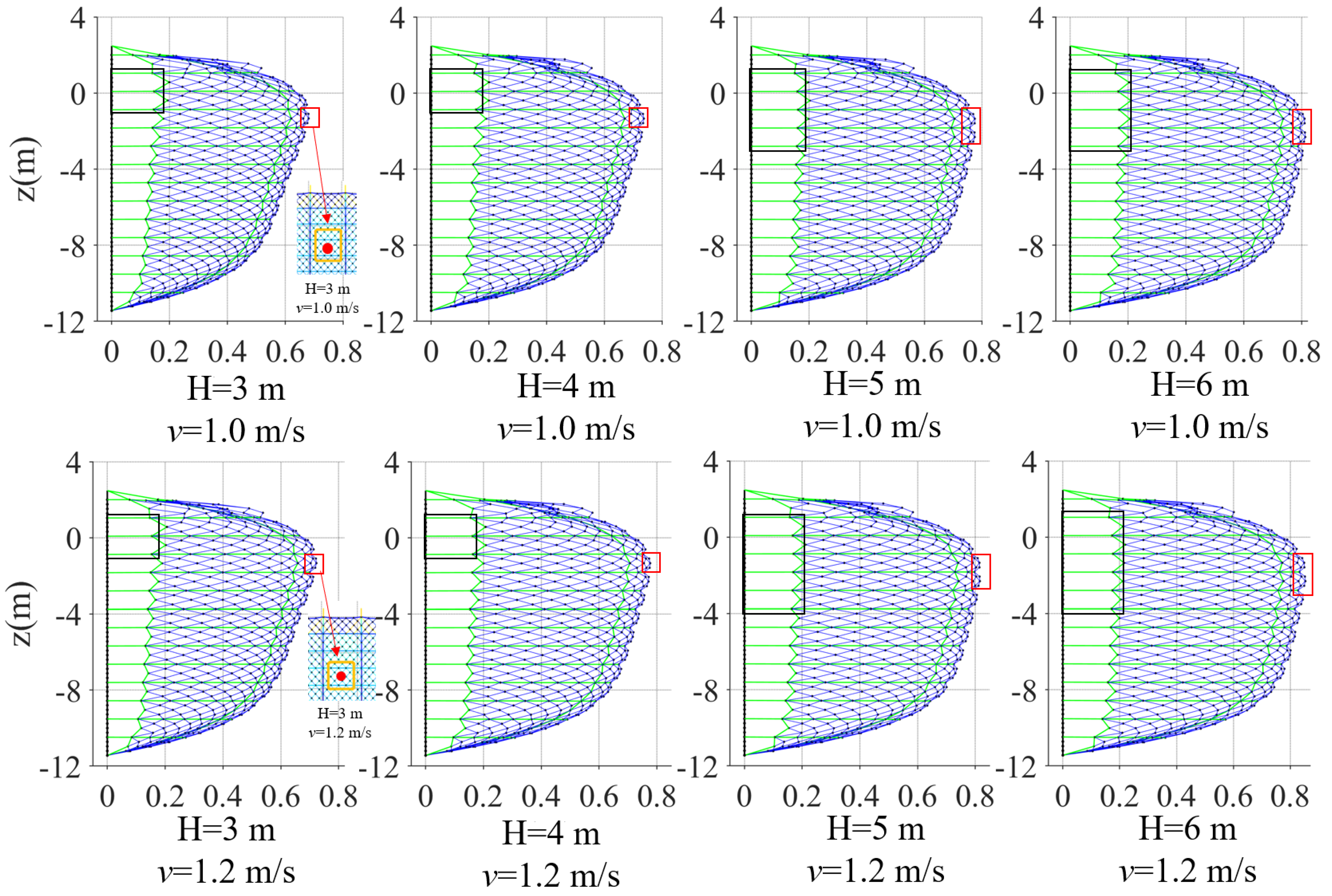
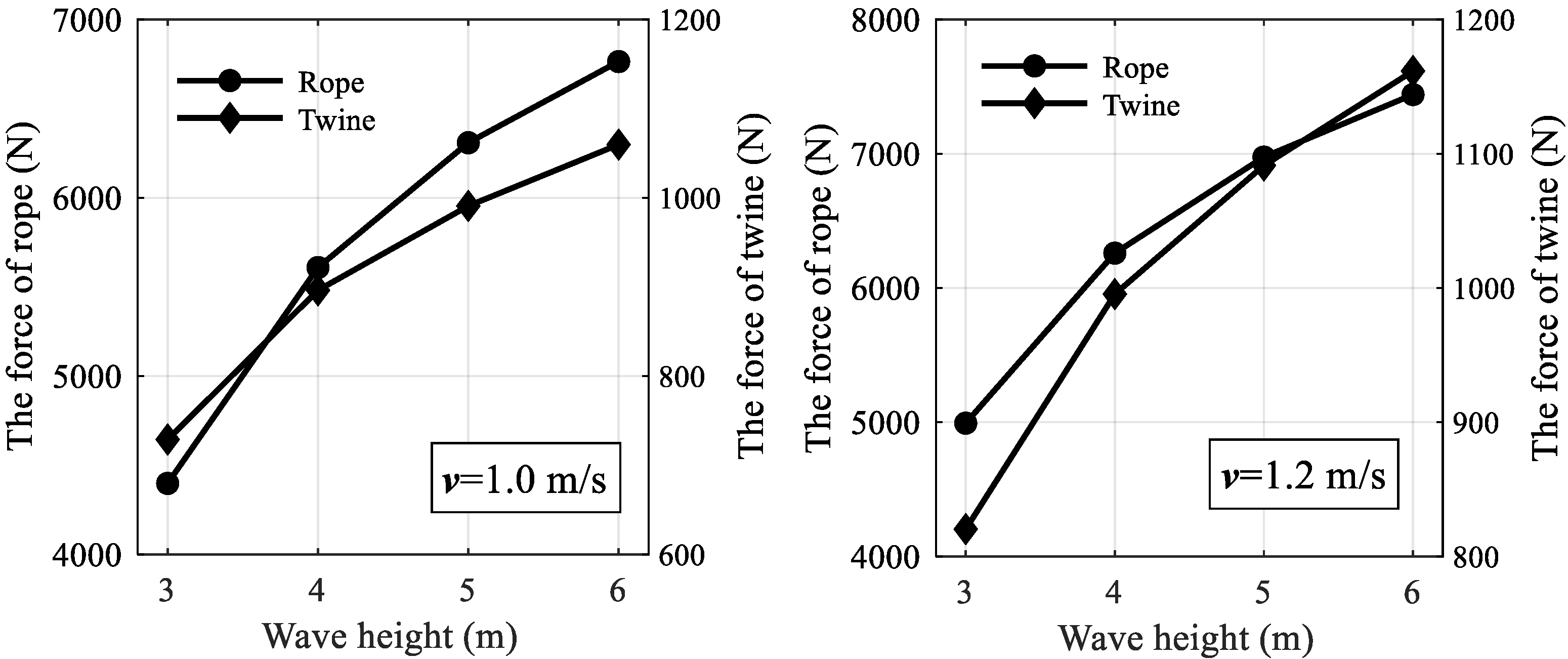
- The combined action of waves and currents had a great influence on the force of the net. Regions 1–15 were the positions where the force was the greatest, and these regions accounted for more than 64% of the force of the entire net. Compared with a pure wave load (H = 3 m), the maximum force of the rope and net twine increased by 59.39% and 56.67% (H = 3 m, v = 1.0 m/s), respectively. This study reveals that with the strengthening of the wave loads, the increased rate of the maximum force of the net twine gradually slows down and that pile–net-gapped enclosure aquaculture facilities show better performance in extreme ocean loads;
- (iv)
- In practical engineering, the vertical rope and horizontal rope need to be reinforced at the connection of the top channel steel and near the still-water level, respectively. The net twine needs to be reinforced at the connection of the top channel steel and near an elevation of (−0.5)–(−2) m.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pen Culture (Enclosure Culture) as an Aquaculture System. Available online: https://www.fao.org/3/ac181e/AC181E03.htm (accessed on 5 August 2022).
- Miyashita, S. The history of marine aquaculture facilities and the net-cage culture system. Fish. Tech. 2008, 1, 13–19. [Google Scholar]
- Jiang, G.-Q. A Study on Enclosure Culture Techniques for Large Yellow Croaker, Larimichthys crocea (Richardson)in Epeiric Sea. Mod. Fish. Inf. 2011, 26, 21. [Google Scholar]
- JGJ 94-2008; Code for Pile Foundation of Harbor Engineering. Ministry of Construction of the People’s Republic of China: Beijing, China, 2008.
- JTS 167-4-2012; Technical Code for Building Pile Foundation. Ministry of Communications of the People’s Republic of China: Beijing, China, 2012.
- Fredriksson, D.W.; Swift, M.; Irish, J.D.; Tsukrov, I.; Celikkol, B. Fish cage and mooring system dynamics using physical and numerical models with field measurements. Aquac. Eng. 2003, 27, 117–146. [Google Scholar] [CrossRef]
- Fredriksson, D.W.; DeCew, J.C.; Tsukrov, I. Development of structural modeling techniques for evaluating HDPE plastic net pens used in marine aquaculture. Ocean Eng. 2007, 34, 2124–2137. [Google Scholar] [CrossRef]
- Tsukrov, I.; Eroshkin, O.; Fredriksson, D.; Swift, M.; Celikkol, B. Finite element modeling of net panels using a consistent net element. Ocean Eng. 2003, 30, 251–270. [Google Scholar] [CrossRef]
- Moe, H.; Fredheim, A.; Hopperstad, O. Structural analysis of aquaculture net cages in current. J. Fluids Struct. 2010, 26, 503–516. [Google Scholar] [CrossRef]
- Lee, C.-W.; Kim, Y.-B.; Lee, G.-H.; Choe, M.-Y.; Lee, M.-K.; Koo, K.-Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Zhao, Y.-P. Numerical Investigation on Hydrodynamic Behavior of Deep-Water Gravity Cage. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2007. [Google Scholar]
- Dong, S.; You, X.; Hu, F. Experimental investigation on the fluid–structure interaction of a flexible net cage used to farm Pacific bluefin tuna (Thunnus orientalis). Ocean Eng. 2021, 226, 108872. [Google Scholar] [CrossRef]
- Qu, X.-Y.; Hu, F.; Kumazawa, T.; Takeuchi, Y.; Dong, S.; Shiode, D.; Tokai, T. Deformation and drag force of model square fish cages in a uniform flow. Ocean Eng. 2019, 171, 619–624. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, S.; Guedes Soares, C. Numerical Study on the Mooring Force in an Offshore Fish Cage Array. J. Mar. Sci. Eng. 2022, 10, 331. [Google Scholar] [CrossRef]
- Xu, Z.; Qin, H. Fluid-structure interactions of cage based aquaculture: From structures to organisms. Ocean Eng. 2020, 217, 107961. [Google Scholar] [CrossRef]
- Bi, C.-W.; Zhao, Y.-P.; Dong, G.-H. Experimental study on the effects of farmed fish on the hydrodynamic characteristics of the net cage. Aquaculture 2020, 524, 735239. [Google Scholar] [CrossRef]
- Bai, X.; Yang, C.; Luo, H. Hydrodynamic performance of the floating fish cage under extreme waves. Ocean Eng. 2021, 231, 109082. [Google Scholar] [CrossRef]
- Nobakht-Kolur, F.; Zeinoddini, M.; Ghalebi, A. Hydrodynamic forces in marine-fouled floating aquaculture cages: Physical modelling under irregular waves. J. Fluids Struct. 2021, 105, 103331. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Li, Y.-C.; Gui, F.-K.; Dong, G. Numerical Simulation of the Effects of Weight System on the Hydrodynamic Behavior of 3-D Net of Gravity Cage in Current. J. Hydrodyn. 2007, 19, 442–452. [Google Scholar] [CrossRef]
- Liu, Z.; Mohapatra, S.; Soares, C. Finite Element Analysis of the Effect of Currents on the Dynamics of a Moored Flexible Cylindrical Net Cage. J. Mar. Sci. Eng. 2021, 9, 159. [Google Scholar] [CrossRef]
- Liu, Z.; Garbatov, Y.; Soares, C.G. Numerical Modelling of Full-Scale Aquaculture Cages under Uniform Flow. In Developments in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor and Francis: London, UK, 2021; Volume 2, pp. 705–712. [Google Scholar] [CrossRef]
- Gui, F.-K.; Chen, T.-H.; Zhao, Y.-P.; Dong, G.-H. Study of effect on wave mechanical properties for net panel of pile-column type net enclosure by fixations. J. Dalian Univ. Technol. 2017, 57, 285–292. [Google Scholar]
- Chen, T.-H.; Meng, A.; Gui, F.-K. Effect of wave height and direction on the hydraulic characteristics of the pile-column type net enclosure aquaculture system. Trans. Chin. Soc. Agric. Eng. 2017, 33, 245–251. [Google Scholar]
- Martin, T.; Kamath, A.; Bihs, H. A Lagrangian approach for the coupled simulation of fixed net structures in a Eulerian fluid model. J. Fluids Struct. 2020, 94, 102962. [Google Scholar] [CrossRef]
- Martin, T.; Bihs, H. A non-linear implicit approach for modelling the dynamics of porous tensile structures interacting with fluids. J. Fluids Struct. 2021, 100, 103168. [Google Scholar] [CrossRef]
- Yang, H.; Xu, Z.; Bi, C.-W.; Zhao, Y.-P. Numerical modeling of interaction between steady flow and pile-net structures using a one-way coupling model. Ocean. Eng. 2022, 254, 111362. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Chen, Q.-P.; Bi, C.-W. Numerical investigation of nonlinear wave loads on a trestle-netting enclosure aquaculture facility. Ocean Eng. 2022, 257, 111610. [Google Scholar] [CrossRef]
- Brebbia, C.; Walker, S. Dynamic Analysis of Offshore Structures. Forces Slender Members 1979, 109–144. [Google Scholar] [CrossRef]
- Li, Y.; Gui, F.; Teng, B. Hydrodynamic behavior of a straight floating pipe under wave conditions. Ocean Eng. 2007, 34, 552–559. [Google Scholar] [CrossRef]
- Li, Y.-C.; Zhao, Y.-P.; Gui, F.-K.; Teng, B. Numerical simulation of the hydrodynamic behaviour of submerged plane nets in current. Ocean Eng. 2006, 33, 2352–2368. [Google Scholar] [CrossRef]
- Deval, M.C.; Bök, T.; Ates, C.; Özbilgin, H. Selectivity of PE and PA material coding for rose shrimp (Parapenaus longirostris) in Turkish twin rigged beam trawl fishery. Fish. Res. 2006, 81, 72–79. [Google Scholar] [CrossRef]
- Bessonneau, J.S.; Marichal, D. Study of the dynamics of submerged supple nets (applications totrawls). Ocean. Eng. 1998, 25, 563–583. [Google Scholar] [CrossRef]
- Mehaute, B.L. An Introduction to Hydrodynamics and Water Waves. In Water Wave Theories; US Department of Commerce, ESSA: Washington, DC, USA, 1976; pp. 195–205. [Google Scholar]
- Dong, S.; You, X.; Hu, F. Effects of wave forces on knotless polyethylene and chain-link wire netting panels for marine aquaculture cages. Ocean Eng. 2020, 207, 107368. [Google Scholar] [CrossRef]
- Cha, B.J.; Kim, H.Y.; Bae, J.H.; Yang, Y.S.; Kim, D.H. Analysis of the hydrodynamic characteristics of chain-link woven copper alloy nets for fish cages. Aquac. Eng. 2013, 56, 79–85. [Google Scholar] [CrossRef]
- Tsukrov, I.; Drach, A.; DeCew, J.; Swift, M.R.; Celikkol, B. Characterization of geometry and normal drag coefficients of copper nets. Ocean Eng. 2011, 38, 1979–1988. [Google Scholar] [CrossRef]
- Swift, M.R.; Fredriksson, D.W.; Unrein, A.; Fullerton, B.; Patursson, O.; Baldwin, K. Drag force acting on biofouled net panels. Aquac. Eng. 2006, 35, 292–299. [Google Scholar] [CrossRef]
- Nobakht-Kolur, F.; Zeinoddini, M.; Harandi, M.A.; Abi, F.; Jadidi, P. Effects of soft marine fouling on wave-induced forces in floating aquaculture cages: Physical model testing under regular waves. Ocean Eng. 2021, 238, 109759. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Rope | Material | Polyethylene |
| Diameter | 18 mm | |
| Net | Material | Polyethylene |
| Diameter | 3.5 mm | |
| Twine length | 80 mm | |
| Shrinkage coefficient (horizontal) | 0.66 | |
| Shrinkage coefficient (vertical) | 0.75 | |
| Net height | 13.44 m | |
| Net width | 6.736 m | |
| Nodule | Material | Polyethylene |
| Diameter | 10.99 mm |
| Case | Wave Height H (m) | Current v (m/s) | Wave Period T (s) | Note |
|---|---|---|---|---|
| 1 | 3 | 0 | 4.72 | Pure wave |
| 2 | 4 | 0 | 5.58 | |
| 3 | 5 | 0 | 6.43 | |
| 4 | 6 | 0 | 7.27 | |
| 5 | 0 | 0.8 | 0 | Pure current |
| 6 | 0 | 1.0 | 0 | |
| 7 | 0 | 1.2 | 0 | |
| 8 | 0 | 1.5 | 0 | |
| 9 | 3 | 1.0 | 4.72 | Wave + current |
| 10 | 4 | 5.58 | ||
| 11 | 5 | 6.43 | ||
| 12 | 6 | 7.27 | ||
| 13 | 3 | 1.2 | 4.72 | Wave + current |
| 14 | 4 | 5.58 | ||
| 15 | 5 | 6.43 | ||
| 16 | 6 | 7.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Feng, D.; Gui, F.; Xu, Z. Dynamic Behavior of the Net of a Pile–Net-Gapped Enclosure Aquaculture Facility. J. Mar. Sci. Eng. 2022, 10, 1166. https://doi.org/10.3390/jmse10091166
Wang S, Feng D, Gui F, Xu Z. Dynamic Behavior of the Net of a Pile–Net-Gapped Enclosure Aquaculture Facility. Journal of Marine Science and Engineering. 2022; 10(9):1166. https://doi.org/10.3390/jmse10091166
Chicago/Turabian StyleWang, Shun, Dejun Feng, Fukun Gui, and Zhijing Xu. 2022. "Dynamic Behavior of the Net of a Pile–Net-Gapped Enclosure Aquaculture Facility" Journal of Marine Science and Engineering 10, no. 9: 1166. https://doi.org/10.3390/jmse10091166
APA StyleWang, S., Feng, D., Gui, F., & Xu, Z. (2022). Dynamic Behavior of the Net of a Pile–Net-Gapped Enclosure Aquaculture Facility. Journal of Marine Science and Engineering, 10(9), 1166. https://doi.org/10.3390/jmse10091166