1. Introduction
Low-frequency active sonar (LFAS) has gradually become a powerful tool in underwater detection [
1]. Active sonar can obtain the maximum amount of target information through waveform design and can improve the ability of interference suppression. In underwater detection, various tasks are carried out, such as target detection, classification, and so on [
2]. With increasing attention paid to active sonar, waveform design has become a hot issue. For various tasks, active sonar can emit signals according to the characteristics of different waveforms.
At present, to perform target detection, continuous waveforms (CWs), linear frequency-modulated (LFM) waveforms [
3], and hyperbolic frequency-modulated (HFM) [
4] waveforms are mainly used. The CW signal has a fixed frequency and duration. It is a Doppler-sensitive signal, which can measure the Doppler information of the target, and possesses good velocity resolution. LFM and HFM waveforms are Doppler-insensitive, but have good range resolution. In practical application, a Doppler-insensitive waveform can use a replica to match the receiving signal, which can greatly reduce the consumption of computing resources and is more convenient for engineering applications. However, this paper mainly compares the reverberation suppression performance of Doppler-sensitive signals, so Doppler-insensitive signals are not discussed here and their performance is referenced in the literature [
1]. Binary phase-shift keying (BPSK) waveforms and Costas waveforms have both good range resolution and velocity resolution, and they can detect the target from the perspectives of velocity and range [
2,
5]. Yet, the reverberation suppression performance of these pulses is limited, due to the small frequency shift of the target replica spectrum relative to the transmitted bandwidth [
1].
To achieve superior target detection of active sonar, reverberation suppression is a problem that must urgently be solved. For reverberation suppression, one method is to use signal processing methods, such as an adaptive pre-whitener based on the AR model [
6], a principal component inverse (PCI) algorithm [
7], signal subspace extraction (SSE) [
8], and the fractional Fourier transform method [
9]. Another method for reverberation suppression is to design a reasonable transmitted waveform, which itself has a good ability to inhibit reverberation. The sinusoidal frequency-modulated (SFM) waveform is widely used in radar and was first applied in sonar in paper [
10]. The SFM waveform can solve the Doppler information of the target and can suppress reverberation. However, the range resolution of the SFM waveform is poor [
10,
11,
12]. Hague et al. studied a generalization of the SFM waveform, which is known as the generalized SFM (GSFM) waveform [
12,
13,
14]. The ambiguity function of the GSFM waveform approaches a thumbtack shape, which determines the waveform’s ability to detect weak targets in the presence of strong reverberation [
12]. Doisy et al. designed the pulse trains of linear frequency-modulated (PTFM) waveforms by making use of the smaller energy of the cross-spectrum between the replica of the comb spectrum signal and the reverberation signal [
1,
15,
16,
17]. Experimental research [
18] and Q-function analysis [
19] show that PTFM waveforms have a good ability to suppress reverberation, compared with CW and HFM waveforms. However, to avoid ambiguity in a Doppler measurement, the PTFM waveform restricts the number of sub-pulses.
In this paper, we propose a coprime pulse train of linear frequency-modulated (CPTFM) waveform to mitigate the reverberation influence, which eliminates the limit of Doppler ambiguity by applying the robust Chinese remainder theorem [
20,
21,
22,
23]. Reverberation-to-signal ratio (RSR) is the metric to evaluate the ability of different waveforms to suppress reverberation. This paper proposes the average RSR to evaluate the ability of the CPTFM waveform in suppressing reverberation. The theoretical analysis shows that the average RSR of the CPTFM waveform is 8 dB lower than the reference PTFM waveform. Simulated experiments are conducted to evaluate the capabilities of reverberation suppression and detection of low-speed targets. The average RSR of the simulation experiments remains consistent with the theoretical results.
The remainder of this paper is divided into the following four sections. The
Section 2 introduces the concept of a reverberation-to-signal ratio and describes the concept of a reverberation zone. The CPTFM waveform is described in detail in
Section 3. In
Section 4, the simulation experiment is introduced in detail, and respective RSRs of CW, PTFM, and CPTFM waveforms are compared, and the superior performance of the CPTFM waveform in reverberation suppression is verified from the simulation experiment. Finally, the paper is summarized in
Section 5. Note that the idea for this article has been published in a conference paper [
24] written by the authors. The contribution of this paper is the detailed derivation of formulas for the different reverberation zones of CPTFM waveforms and the use of average RSR to evaluate the superior performance of CPTFM over CW and PTFM waveforms. The theoretical analysis verifies the reverberation suppression capability of the waveforms used in this paper.
2. PTFM and Its Performance in Different Reverberation Zones
In this section, first, the respective expressions of the reverberation level, signal level, and reverberation-signal ratio are derived through the traditional signal processing method. Second, this section also describes reverberation zones A and B, respectively corresponding to very low and low Doppler targets. This helps to compare the detection ability of different waveforms to targets with different speeds in reverberation-limited environments.
2.1. Reverbaration Theory
In this sub-section, the relevant knowledge of reverberation theory is introduced in detail. First, we derive the general expressions of signal level and reverberation level after the conventional signal processing algorithm (beamforming and matched filtering). This expression is established in Doisy’s paper [
1]. The specific process is as follows:
- (1)
Normalized beamforming, where is the array beam pattern of a beam steered in direction .
- (2)
Matched filtering with a series of normalized Doppler scaled replicas of transmitted waveform .
The energy of the transmitted signal is defined as follows:
After beamforming and matched filtering with the replica signal
using the target Doppler, the target signal power received by the array at the target direction
(reflected from the target) is calculated as follows:
The term is the array beam pattern in the direction of the target. The final term represents the result of the matched filter. The target Doppler is , in which is the sonar speed, is the absolute target radial speed, is the bearing of the target relative to a sonar platform, and is the speed of sound in water.
The reverberation level after beamforming and matched filtering with the replica signal
using the target Doppler is represented by the following:
where
is the result of the matched filter between the replica matched to the target Doppler and the reverberation scatters in direction
. The result of the matched filter of the replica signal
and the reverberation signal in direction
is given by the following:
where
is Doppler of the scatter, and
is the speed of the towed linear array.
In the noise-limited environment, the higher the energy of the transmitted signal is, the higher the SNR will be. In the reverberation-limited environment, this is not the case. Therefore, simply increasing the energy of the transmitted signal does not improve the detection capability. The main purpose of waveform design is to minimize the
RSR, in turn improving the detection capability in reverberation-limited situations. The
RSR is shown in the following formula [
1]:
By applying Parseval’s theorem, the formula can be converted to the frequency domain, and
RSR expressions can be changed as follows:
where
is the spectrum of the transmitted waveform.
2.2. Pulse Train of Frequency-Modulated Waveform
The PTFM waveform has a sub-pulse length
, bandwidth
B, and central frequency
, and the number of sub-pulses is
N. The PTFM waveform can be described as follows:
where
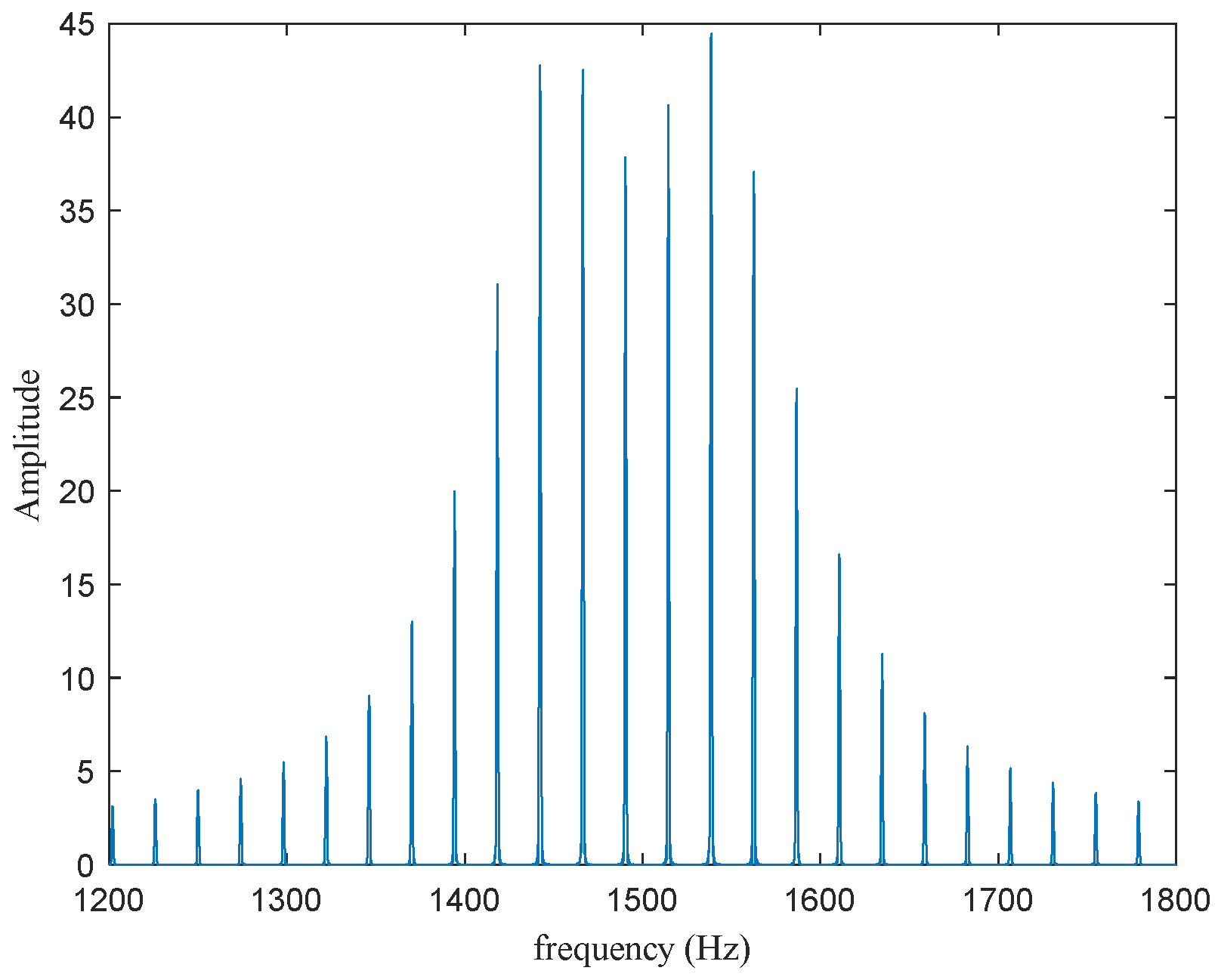
Figure 1 depicts the spectrum of a PTFM signal with a shading function sin
2. The spectrum consists of several lines at the frequency
,
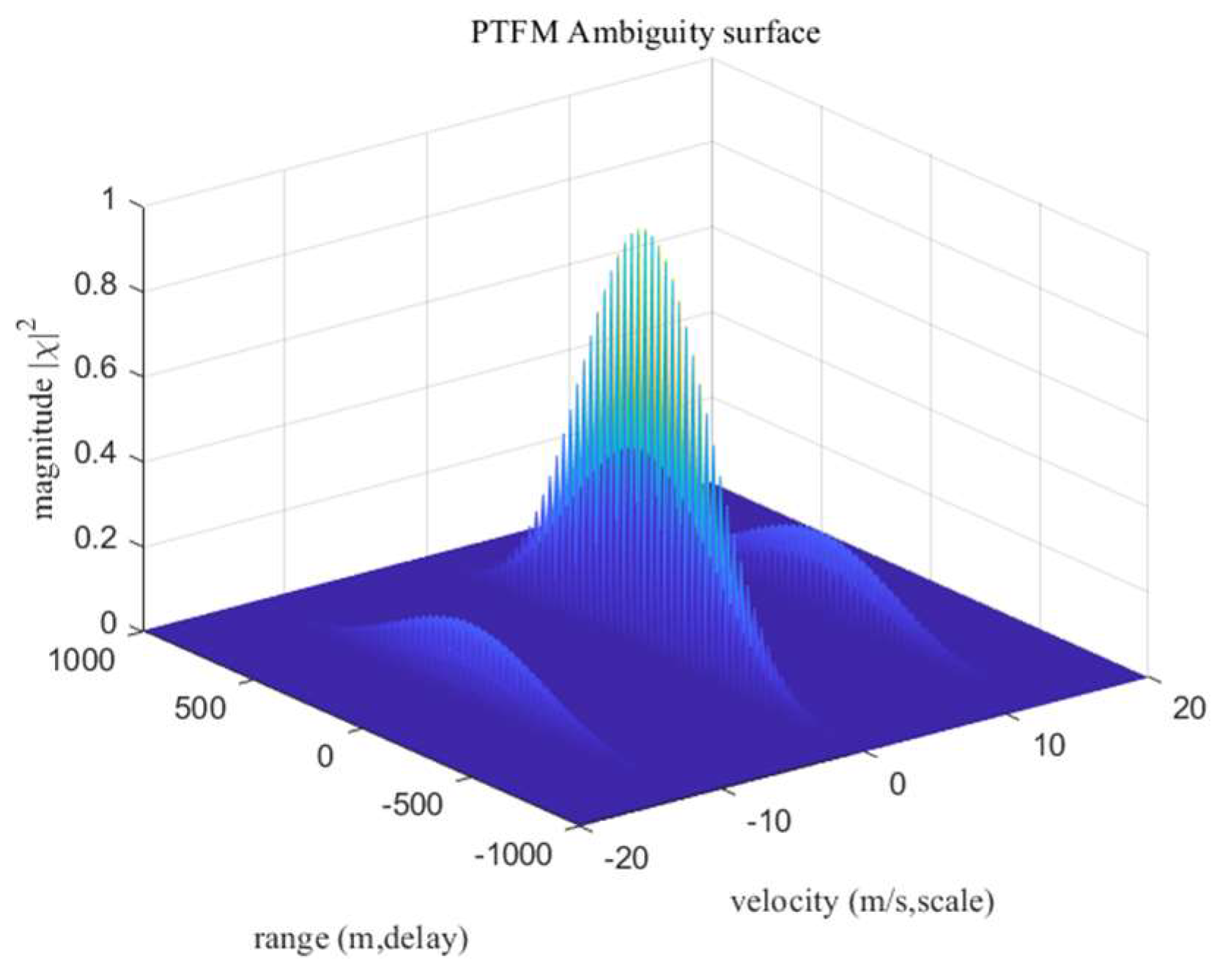
, which is comb-shaped. The ambiguity function of a PTFM waveform is shown in
Figure 2, and there is an obvious trick in the ambiguity function. Since the volume under the ambiguity surface is one, it can be seen from
Figure 2 that the high-Doppler target has a raised peak, thus the low-Doppler target has a lower side lobe near it. Compared with the CW and HFM waveforms, the PTFM waveform has a better ability to detect low-speed targets.
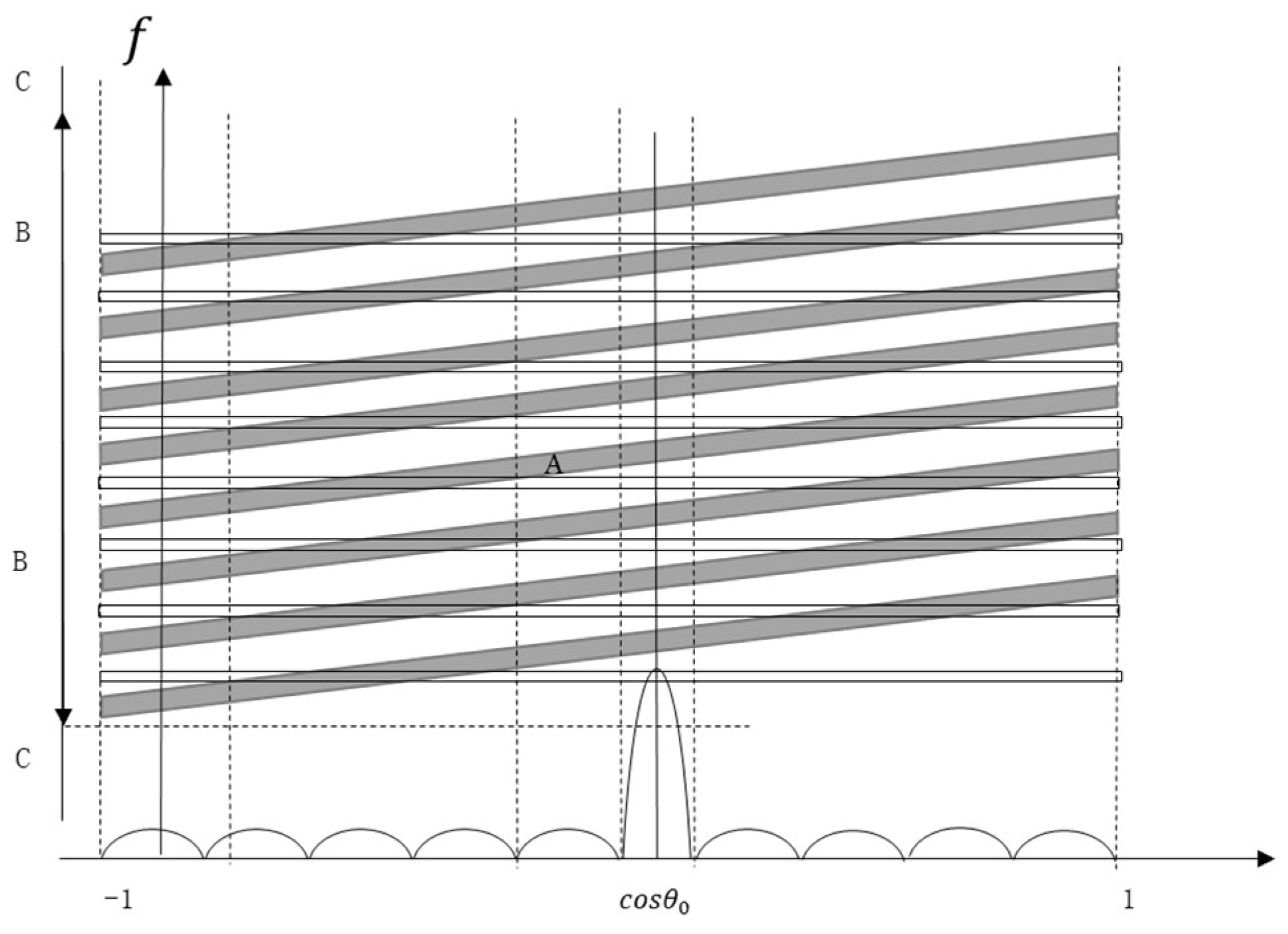
The reverberation level of the PTFM waveform based on the integral (3) is shown in
Figure 3. The vertical axis is the frequency and the horizontal axis is the cosine of the bearing (
), while the reverberation spectrum of a PTFM waveform corresponds to the comb lines in this representation, described by the following:
The reverberation zone can be divided into three zones: A, B, and C, which respectively correspond to very low, low, and high Doppler targets in
Figure 3. Very low Doppler targets (zone A) signify that their Doppler shift falls within the Doppler spread of reverberation in the main lobe of the beam pattern. In zone A, the target and scatterer cannot be distinguished from the Doppler shift information. Low Doppler targets (zone B) are such that their Doppler shift matches the Doppler shift of scatters within the sidelobes of the beam pattern. High Doppler targets (zone C) are those in which scatter Doppler shift does not match the target’s Doppler shift.
Due to the comb spectrum of the PTFM waveform, the cross-spectrum between the replica and reverberation appears in multiple directions. The number of the overlaps in the cross-spectrum is equal to derived by Doisy. The specific expressions of the target radial speed range and RSR in different zones of the PTFM waveform have been derived. These formulas are only introduced in brief in this paper. The zones are introduced in the following part. is the sonar speed and is the absolute target radial speed.
Zone A: The range of target speed for a PTFM waveform in zone A is:
where
is the coefficient dependent on the array shading,
is the waveform length, and
L is the length of the linear received array. The expression of
RSR for Hamming and sin
2 pulse shadings in zone A is:
where
is the −3 dB width of the main lobe of the beam pattern.
Zone B: The range of target speed for a PTFM waveform in zone B is:
This zone is the closest situation to real anti-submarine warfare. The
RSR in zone B is represented by the following:
where
corresponds to the angular interval of overlap between the replica and reverberation spectra. The frequencies of the scatters in this interval matches the target Doppler channel. The SLL is the average beam sidelobe level over the angular interval
. In order to avoid ambiguity in a Doppler measurement, Doisy restricts the discussion to the case
. Therefore, the number of sub-pulse waveforms needs to satisfy
.
- 3.
Zone C: The target speed range in zone C is:
No scatterer’s Doppler in zone C matches the Doppler of the target. The
RSR for zone C for sin
2 shading is:
where SSLL is the spectral sidelobe level.
According to the expression, the RSR of PTFM is directly related to the number of sub-pulse waveforms. To avoid Doppler ambiguity, PTFM limits the number of sub-pulses. In this paper, a new waveform, CPTFM, is proposed to solve the problem of ambiguity velocity to some extent and improve the reverberation suppression ability. The RSRs of CPTFM in zone A and B are derived in detail.
3. CPTFM Waveform
To avoid ambiguity in a Doppler measurement and obtain the best performance in zone B, the PTFM waveform restricts the number of sub-pulses . However, the RSR in zone B depends heavily on the number of sub-pulses . In this paper, we propose a waveform, coprime pulse train of frequency-modulated (CPTFM), and take advantage of the Chinese remainder theorem to obtain Doppler information of the target. Therefore, there is no need to place a limit on the number of the sub-pulses like PTFM, which has a very important impact on the reverberation level of the signal, so good reverberation suppression performance is achieved. In this section, the waveform we proposed is described in detail.
3.1. Coprime Pulse Trains of Frequency-Modulated Waveform
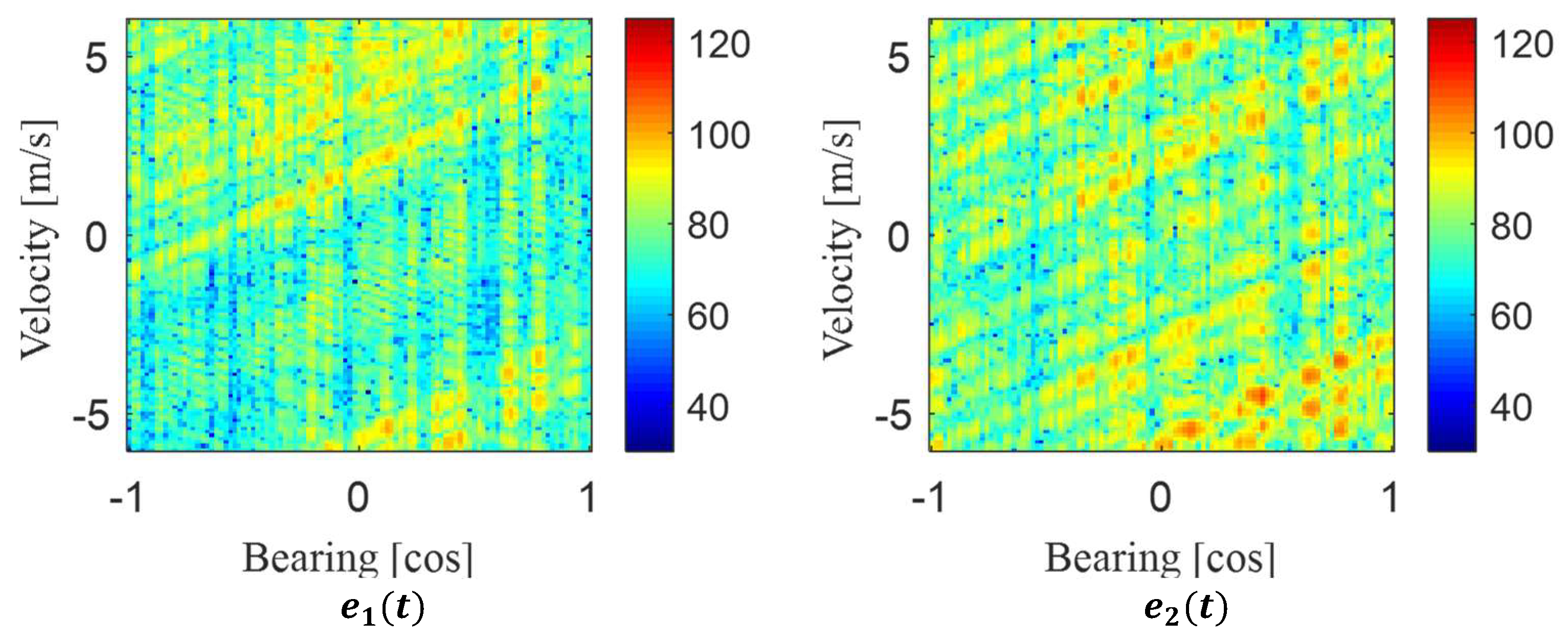
The proposed waveform is composed of two sub-waveforms with low and coprime ambiguity velocities. Two sub-waveforms can simultaneously provide two independent ambiguity velocity measurements. By applying the robust Chinese remainder theorem, the velocity ambiguity is resolved from the two independent measurements [
23,
25]. The focus of this paper is reverberation suppression, and the specific formula of velocity ambiguity is not considered. Our proposed waveform for active sonar is written as follows:
where
and
are the two orthogonal coprime sub-waveforms. The lengths of the two sub-waveforms are
and
, and their central frequencies are
and
, respectively. Their bandwidth
settings are the same. Therefore,
can be written as shown below:
where
where
is the number of
in
. Next,
can be written as
where
where
is the number of
in
.
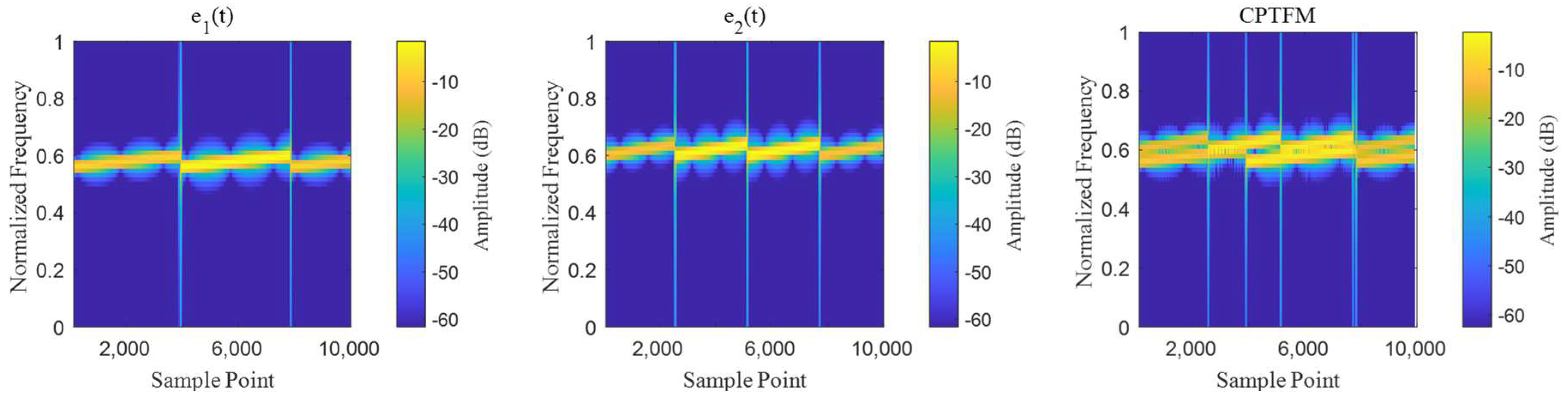
The time-frequency diagram of the CPTFM waveform is shown in
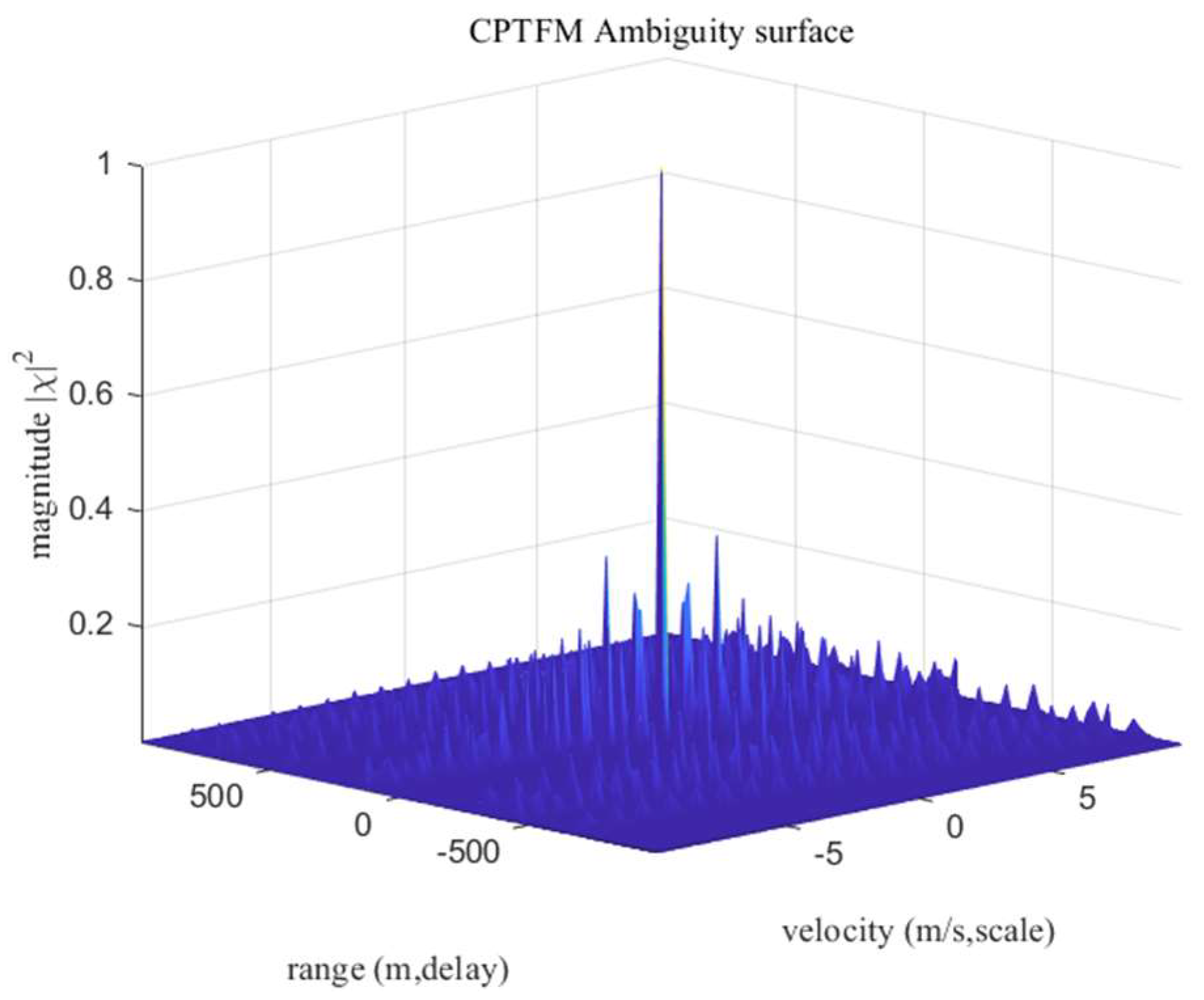
Figure 4. The number of sub-pulses of the two sub-waveforms is coprime. The ambiguity function of this waveform has a shape that resembles a thumbtack and has more sensitive Doppler resolution and range resolution than PTFM shown in
Figure 5. Simply viewed from the perspective of ambiguity surface, CPTFM has a strong ability to suppress reverberation and improve the detection ability for low Doppler targets.
3.2. Limitation of Ambiguity Velocity
Due to the comb shape of the PTFM spectrum, the cross-spectrum of the target and reverberation originates from multiple directions. The angular interval between these directions is
. The number of overlap spectra is
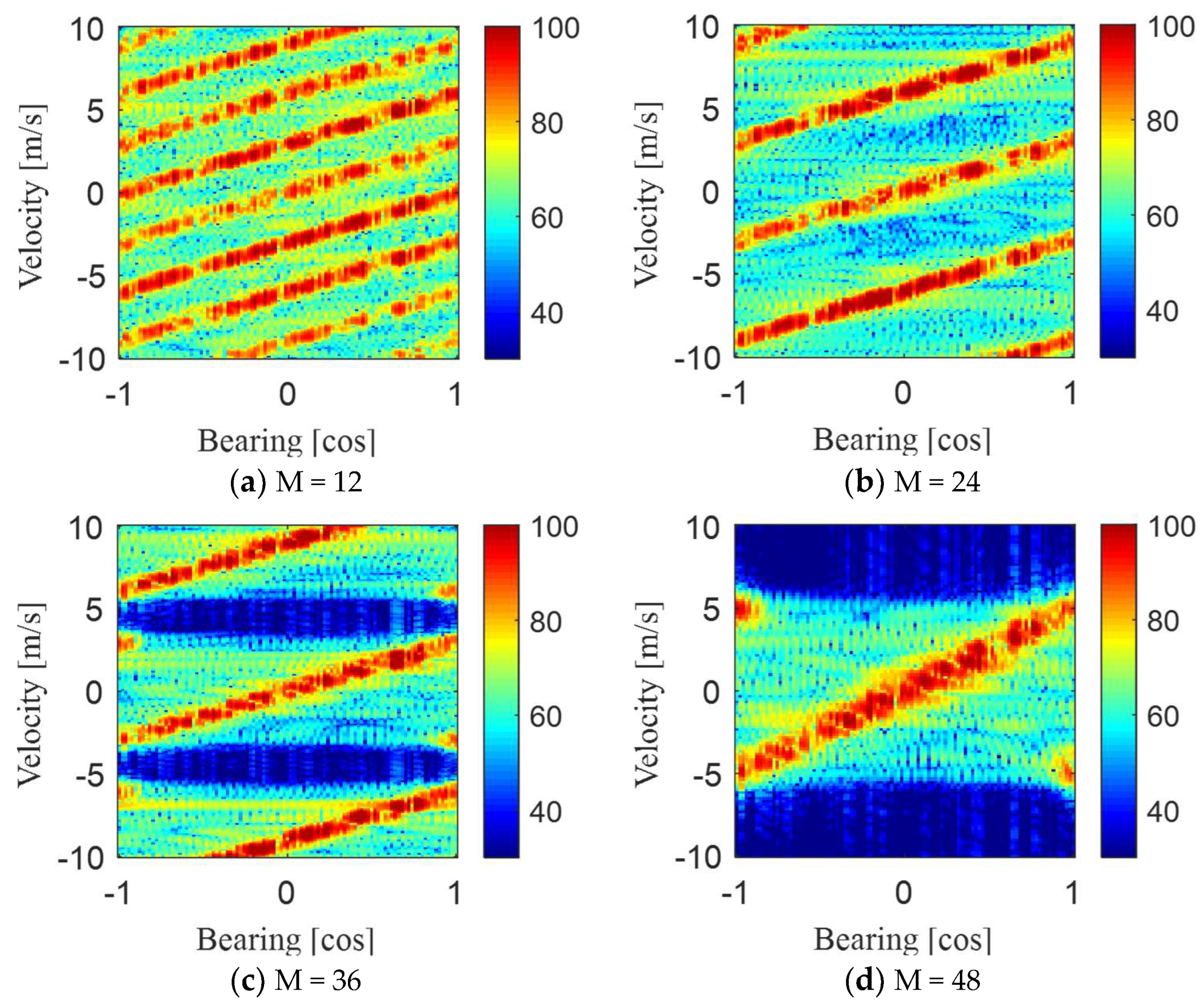
. When
, the Doppler ambiguity phenomenon occurs, as shown in
Figure 6. As can be seen, the reverberation zone gradually exhibits Doppler ambiguity as the number of sub-pulses decreases. If the energy of the target is less than the reverberation, then it would be difficult to distinguish the target from the reverberation or to obtain the Doppler velocity of the target. Therefore, to avoid such a situation, Doisy only discussed the reverberation suppression performance of the PTFM waveform for the case
. According to the previous sections, however,
RSR shows a positive correlation with the number of sub-pulses, and limiting the number of sub-pulses also limits the reverberation suppression capability to some extent. As can be seen from the figure, as the number of sub-pulses decreases, the reverberation level in zone A is gradually decreasing and therefore the detection of targets in this zone is improved. For CPTFM, it is not necessary to satisfy the above equations. The robust Chinese remainder theorem is used to solve the problem of Doppler ambiguity. At the same time, the target in zone A is distinguished easily.
The ambiguity velocity of
is expressed as follows:
where
and
are the central frequency of the two sub-pulse signals, and
and
are the pulse width of the two sub-pulse signals. The maximum ambiguity velocity of our proposed signal is:
where
and
are two integers and coprime.
This paper does not deal with the specific Doppler solution problem, but focuses on the reverberation suppression performance of the waveform. Only the maximum ambiguity velocity of the CPTFM waveform is required to meet the actual usage requirements, and this paper focuses on analyzing how the corresponding reverberation suppression capacity of this waveform changes when the number of sub-pulses decreases.
3.3. Reverberation Zones of CPTFM
3.3.1. Zone A
The CPTFM signal consists of two PTFM waveforms. Each sub-waveform has its own corresponding zone A, and their ranges of target radial speed are as follows:
where
and
are nonnegative integers,
. For optimal performance in zone B, PTFM restricts the number of overlaps, so that
. However, for the designed CPTFM waveform, the number of overlaps has no restriction. In this case, the target speed range associated with zone A is simplified as follows:
For a CPTFM signal, the signal energy is
. Since the sub-waveform of the CPTFM waveform is a PTFM waveform, the sub-pulse of the PTFM waveform is a linear frequency modulation signal, with the respective durations of
and
, and the same band-width
. Therefore, the spectrum amplitude of the CPTFM among the frequency bandwidth
is as follows:
The formula for the square amplitude of the spectrum at frequency
is as follows:
The square amplitude of the overlapped spectrum between the reverberation and replica signals is:
Based on Formula (31), the
RSR for zone A is determined by the following formula:
3.3.2. Zone B
In this zone, the replica spectral crosses with the reverberation spectral in several directions. These directions add up to the total reverberation strength. In this case, the target radial speed associated with zone B for
and
is calculated as follows:
For CPTFM, the number of pulses is no longer a limiting factor. We can keep CPTFM and PTFM in the same bandwidth
B (the bandwidths of the two sub-waveforms are set to
B/2, so that the entire bandwidth of the waveform is
B), and duration
T. At the same time, the ambiguity velocity of both waveforms is guaranteed to be almost identical, reducing the number of CPTFM sub-pulses for better reverberation suppression. The
RSR of zone B is determined as follows:
Average
RSR zone: With the decrease of pulse number, the Doppler ambiguity phenomenon gradually occurs. The CPTFM waveform is composed of two sub-waveforms, and the number of pulses of each sub-waveform is small. Consequently, there is a repetition phenomenon between zones A and B, and zone C gradually disappears. The reverberation suppression ability of the waveform proposed in this paper cannot be compared by using the RSRs in zones A and B alone. To better evaluate the ability of waveforms to suppress reverberation, the concept of average
RSR in zones A and B is proposed in this paper. According to the radial speed range of zones A and B described in the preceding sections, the formulas of the average
RSR for
CW,
PTFM, and
CPTFM waveforms are defined as follows:
where
,
are the Doppler ranges of zones A and B. Combining the bearing information, the areas of zone A and zone B can be derived and the average RSR of the two zones can be obtained. In
Table 1, the average RSRs of CPTFM, CW, and PTFM waveforms are summarized.
5. Conclusions
The purpose of waveform design is to design a suitable waveform from the transmitter side to produce a lower reverberation level and improve the detection capability of targets in the reverberation-limited environment. It has been shown that the PTFM waveform has a good reverberation suppression capability. Theoretical analysis shows that the reverberation level is positively correlated with the number of sub-pulses. However, to avoid Doppler ambiguity, the PTFM waveform limits the number of sub-pulses, which to some extent hinders the reverberation suppression capability of the PTFM waveform. The proposed CPTFM waveform uses two sub-PTFM waveforms, which obtains the Doppler information of the target from the two independent measurements, and reduces the number of sub-pulses as much as possible to obtain better reverberation suppression capability.
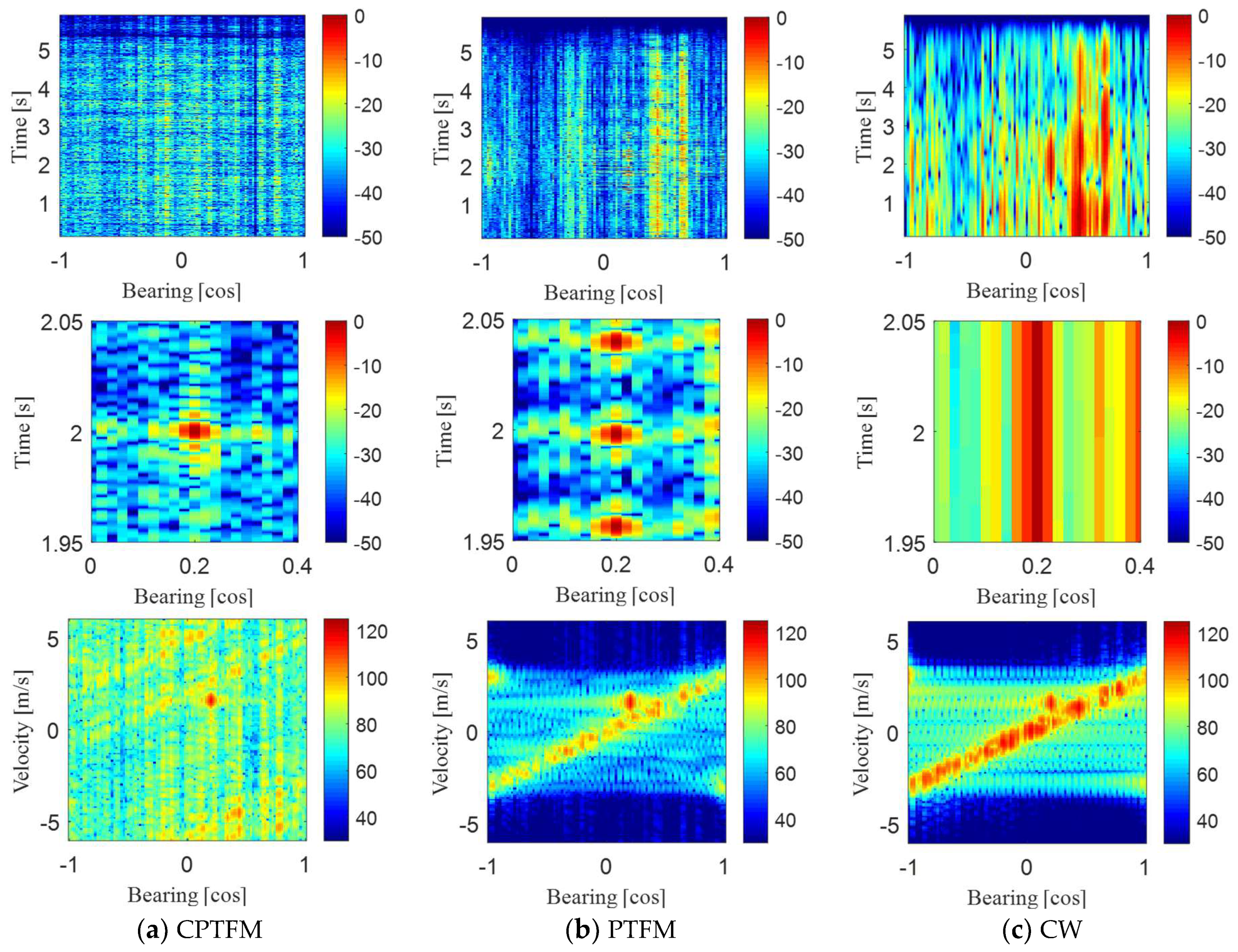
The PTFM and CW waveforms have obvious A and B reverberation zones, while that in the CPTFM is not obvious. In this paper, the average RSR of the two zones is derived and used as a metric to evaluate the reverberation suppression capability of the waveforms. In a typical low-frequency active sonar scenario, theoretical analysis shows that the CPTFM waveform has an average RSR gain of 8.5 dB and 20.7 dB over CW and PTFM waveforms in zone A and B. Analysis of the simulated experiment also shows good results, in agreement with the derived theory. The CPTFM waveform has a gain of 19.5 dB over the CW waveform, which matches the theoretical result. Compared with the PTFM waveform, the gain is 6.97 dB in zone A and B. The simulations also show that the CPTFM waveform has good range resolution and velocity resolution.




 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}