1. Introduction
After the International Maritime Organization (IMO) announced its initial strategy for reducing greenhouse gas (GHG) emissions, it has been continuously strengthening regulations to reduce GHG emissions from ships [
1]. The IMO has set a target to reduce GHG emissions related to maritime transport by 50% compared to 2008 levels. The European Commission has predicted that if additional measures for GHG reduction are not implemented, the proportion of GHG emissions generated by the shipping industry will increase by 17% by 2050 [
2]. Furthermore, the IMO is applying the Energy Efficiency Design Index (EEDI) to newly constructed ships to explore GHG emission reduction measures at the design stage of these vessels [
3].
One effective method to successfully achieve the IMO’s GHG emissions reduction goals is the implementation of alternative fuels and hybrid propulsion systems. According to E.A. Bouman et al. (2017), the use of alternative fuels has been reported to have a potential for up to an 80% reduction in CO
2 emissions, while the application of hybrid propulsion systems can result in a reduction potential of over 15% [
4]. Among these options, hydrogen fuel is being considered as one of the fuels that can ultimately emit zero GHGs and can be used for both coastal and ocean-going ships. Furthermore, with the continuous advancement of fuel cell and battery technologies and the electrification of ship energy systems, research projects are actively underway to operate hybrid electric propulsion systems (e.g., hydrogen fuel cell + battery) in ships [
5].
The ZEMSHIP project aimed to develop and realize the first hydrogen-powered passenger ship with a capacity of over 100 persons. The electric motor consumes electric power of 100 kW which is generated from a proton-exchange membrane fuel cell (PEMFC) and the integrated batteries. The first boat developed by this project, FCS Alsterwasser, has been operating on the Alster in Hamburg since 2008 [
5]. The HySeas III is a project aimed at developing and demonstrating the use of fuel cells to power a Roll-on/Roll-off/Passenger (RoPax) ferry operating in the Orkney Islands, off the coast of Scotland. The ferry uses a hybrid propulsion system consisting of PEMFC of 6 × 100 kW and batteries of 768 kWh, allowing it to operate on fuel cells when conditions are optimal, and switch to battery power when necessary [
6,
7]. The FLAGSHIPS project aims to take zero-emission waterborne transport to an entirely new level by deploying two commercially operated hydrogen fuel cell vessels by 2023. The demo vessels include the world’s first commercial cargo transport vessel operating on hydrogen, plying the river Seine in Paris [
8]. The HFC MARINE project aims to use hydrogen and fuel cells for marine applications. The intention of the first phase is to design a solution geared for demonstration onboard the new modular ferry design by Odense Maritime Technology. The project explored the feasibility of using fuel cells in marine environments with a focus on hydrogen safety and certification, fuel cell cooling, air compression, installation integration, and cost of ownership [
5].
The hybrid electric ship propulsion system (HSPS), which combines two or more power sources, offers excellent fuel economy and is an effective solution for reducing GHG emissions. However, the control problem for the efficient operation of multiple power sources becomes more complex when compared to conventional ship propulsion systems. As a result, research on energy management strategy (EMS) for effective control of hybrid propulsion systems is actively being conducted across various applications, including vehicles, aircraft, and ships [
9,
10,
11,
12,
13,
14,
15,
16,
17]. S. Antonopoulos et al. (2021) presented an energy management framework for hybrid power plants in ships, based on model predictive control (MPC), and evaluated the performance of this framework [
9]. C. Musardo et al. (2005) proposed an EMS based on the adaptive equivalent consumption minimization strategy (A-ECMS), which can be applied to hybrid electric vehicles (HEVs). They also introduced a method for estimating equivalence factors for driving cycles [
12]. G. Du et al. (2020) proposed an energy management algorithm for HEVs using newly introduced reinforcement learning (Dyna-H) and deep reinforcement learning (AMSGrad) algorithms. They reported fast training speeds and high optimal control performance for these algorithms [
13]. K. Deng et al. (2022) introduced an EMS for hybrid railway vehicles considering the degradation of a PEMFC and validated the performance of the proposed EMS based on real measured data in a stochastic training environment [
16].
Many algorithms for EMS of the hybrid power system can be broadly categorized into rule-based and optimization-based approaches [
18]. Among these, rule-based EMS has the advantage of easily controlling the system in real time and having simple control procedures. However, it requires a lot of experience from system designers and operators, does not guarantee the optimal operation points for various operating profiles, and often requires tuning of parameters. On the other hand, optimization-based EMS can propose optimal operating strategies for the target system using online or offline optimization algorithms and delivers excellent energy management performance across various operating profiles. Optimization-based EMS, employing methods such as dynamic programming (DP), Pontryagin’s minimum principle (PMP), or heuristic global optimization algorithms, can calculate optimal energy management problems, making it widely used as a benchmark solution for analyzing the performance of other algorithms. However, global optimization algorithms, including DP, demand significant computational resources, are challenging to adapt to unknown operating conditions, and PMP is not suitable for online optimal control due to the complexity of Hamiltonian function computations (i.e., it is suitable for offline optimal control).
To overcome the limitations of conventional offline optimization, research on optimization-based EMS that can allocate the output of the target system in real-time (referred to as online EMS) is actively underway [
19]. Online EMS can be implemented using various methodologies such as model predictive control, reinforcement learning (RL), equivalent consumption minimization strategy, stochastic dynamic programming, and more. Among these, RL-based online EMS can achieve performance similar to global optimization-based EMS through agent training, has lower computational costs when utilizing the trained agent in actual operations, and can effectively handle high-order models or problems due to its model-free characteristics. For these reasons, many studies were conducted to apply RL-based online EMS to energy management problems in hybrid power systems [
11,
13,
16]. However, despite the strengthening of emission regulations and the consideration of various alternative fuels and power sources in the maritime industry, research on EMS for HSPS remains insufficient.
Meanwhile, most of the research on online EMS for HSPS conducted thus far has focused on propulsion systems using diesel, LNG, and gaseous hydrogen as the main fuel [
9,
10,
17]. Among these, hydrogen is a promising zero-carbon ship fuel for the future. However, when ship capacity increases or bunkering intervals are extended, the volume of fuel tanks needed to store gaseous hydrogen becomes very large. In contrast, when storing hydrogen fuel in a liquid state and using it as fuel by vaporization, it is expected that liquid hydrogen (LH
2) can reduce the volume of fuel tanks, as it has a higher volumetric energy density than gaseous hydrogen (approximately twice as high as 700 bar gaseous hydrogen) [
20,
21]. Furthermore, the individual volume of fuel tanks required for storing high-pressure gaseous hydrogen is not higher than that of LH
2 fuel tanks. It means the number of tanks, valves, and associated equipment should be significantly increased due to its low volumetric energy density.
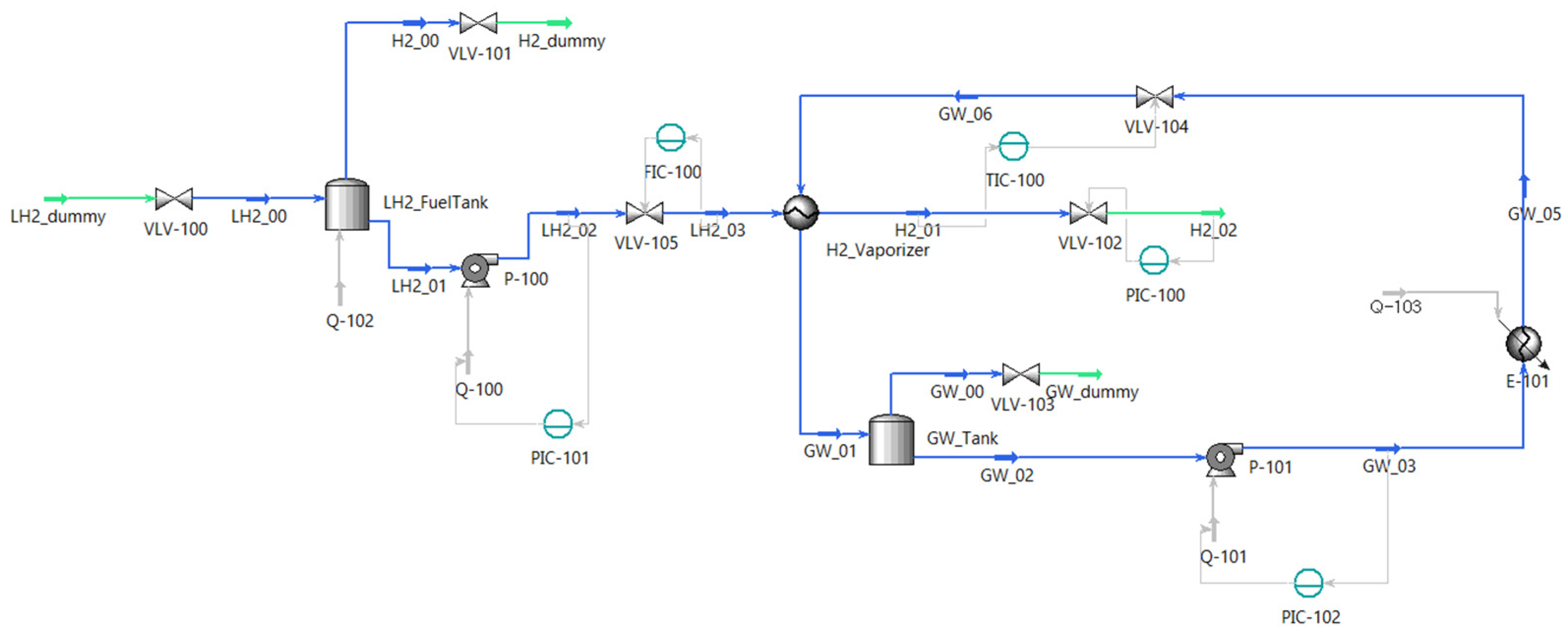
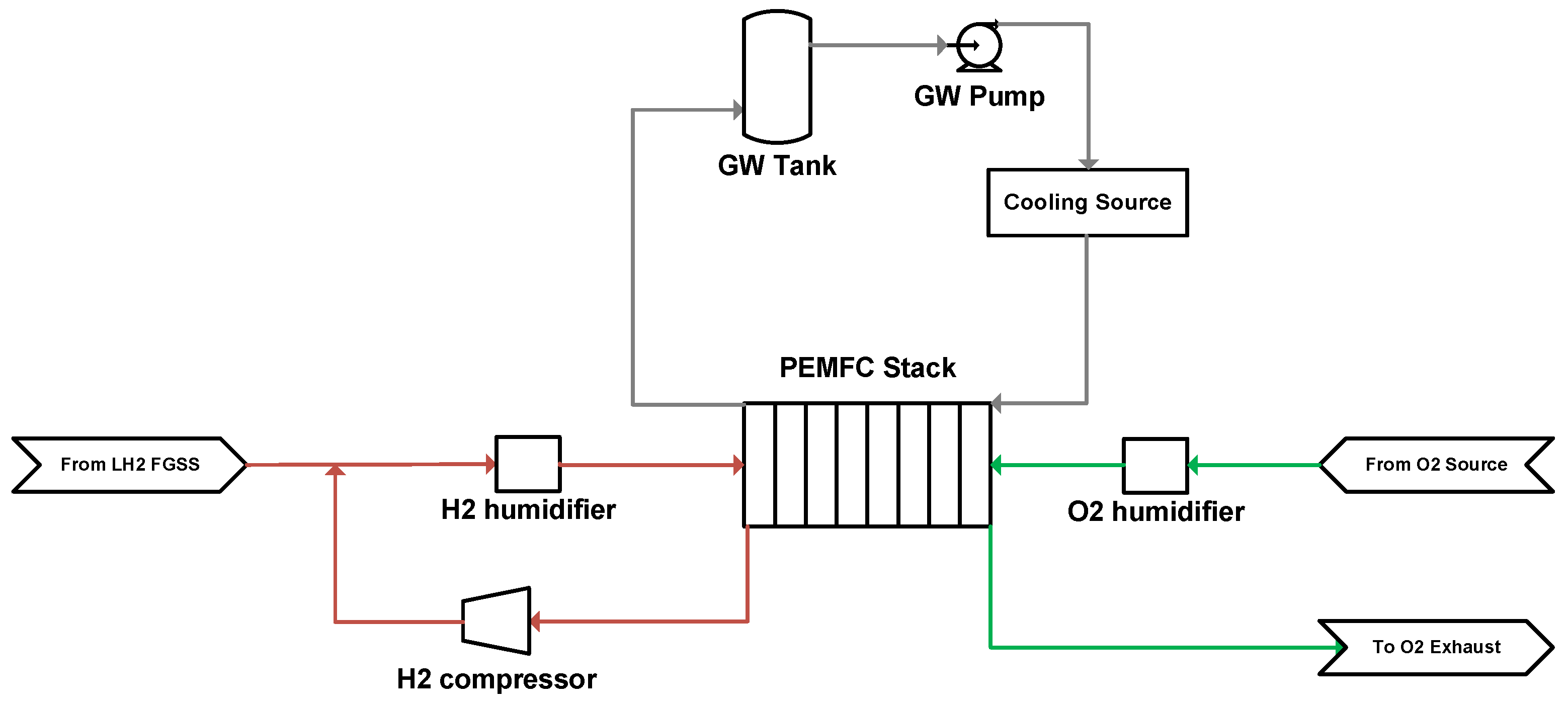
LH
2 is stored at an extremely low saturation temperature, which is around 20 K at atmospheric pressure. Therefore, it requires a fuel gas supply system (FGSS) to match the supply conditions for fuel cells [
22], and additional power for the balance of the plant (BOP power) needs to be supplied to the LH
2 FGSS and PEMFC systems. In other words, it means that the BOP power must be provided to meet the power demand requirements. This additional power can be sourced from either the propulsion system or other onboard power plants. Thus, to apply online EMS to LH
2-HSPS, the supply of BOP power for producing the required power should be included in the energy management problem. However, existing EMS proposals for HSPS, based on prior research, have only considered cost functions related to the power demand for propulsion, and degradation of fuel cells and batteries without the BOP power of the FGSS and power sources. Therefore, there is a need for research on EMS for systems that use LH
2 as a fuel with consideration of BOP power for the LH
2 FGSS and the PEMFC system.
Therefore, this study proposes an EMS for LH
2-HSPS using deep reinforcement learning. Constructing an EMS that considers both power demand and BOP power based on models of the LH
2 FGSS, PEMFC, and battery systems that constitute LH
2-HSPS, energy management performance is compared with conventional optimization algorithms, which are DP and sequential quadratic programming (SQP). Furthermore, we assess the optimized operation strategy with the proposed DRL-EMS through sensitivity analysis of key parameters and changes in operating profiles that affect the EMS. This research provides academic contributions by offering an EMS that can be applied to LH
2-HSPS and considers the BOP power of the target system, with an analysis of its performance. It is expected to provide meaningful insights into the energy management problems of LH
2-based hybrid power systems for various industries in the future. The rest of this study is organized as follows:
Section 2 introduces the description of models of the LH
2 FGSS, PEMFC, and battery systems. In
Section 3, a methodology for energy management is suggested.
Section 4 presents the results and discussion, and
Section 5 shows the conclusions of this study
4. Results and Discussion
Before analyzing the optimal operational strategy applied to LH
2-HSPS by DRL-EMS, the optimization results with DP-EMS and SQP-EMS algorithms are compared to evaluate the performance of these algorithms, as shown in
Table 6. It is observed that both DRL-EMS and SQP-EMS resulted in 0.2% and 10.9% higher OPEX, respectively, compared to DP-EMS. The significant impact on the performance of these two algorithms was attributed to the equivalent degradation cost of the PEMFC system. The degradation rate calculated through the model exhibited discontinuities at low-load operations (<40 kW) and high-load operations (>1800 kW), which SQP-EMS, based on gradient descent, failed to sufficiently consider. Additionally, DRL-EMS yielded OPEX values nearly identical to DP-EMS, indicating that the effective utilization of the battery system allowed DP-EMS to calculate slightly lower OPEX. Meanwhile,
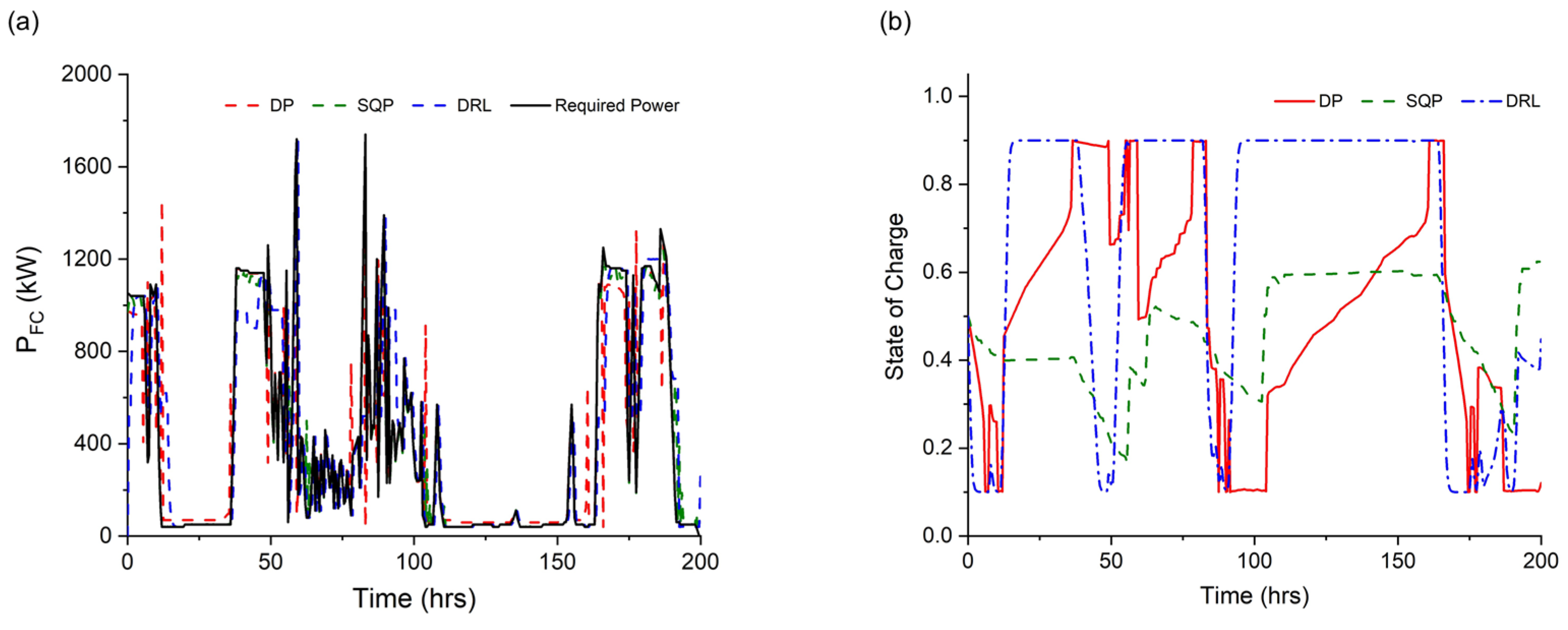
Figure 6 shows the changes in the calculated PEMFC system output and SOC when each EMS is applied. As mentioned earlier, it can be observed that DP-EMS is most effectively utilizing the battery system based on the SOC changes, while SQP-EMS appears to underutilize the installed battery system in situations where future required power is uncertain.
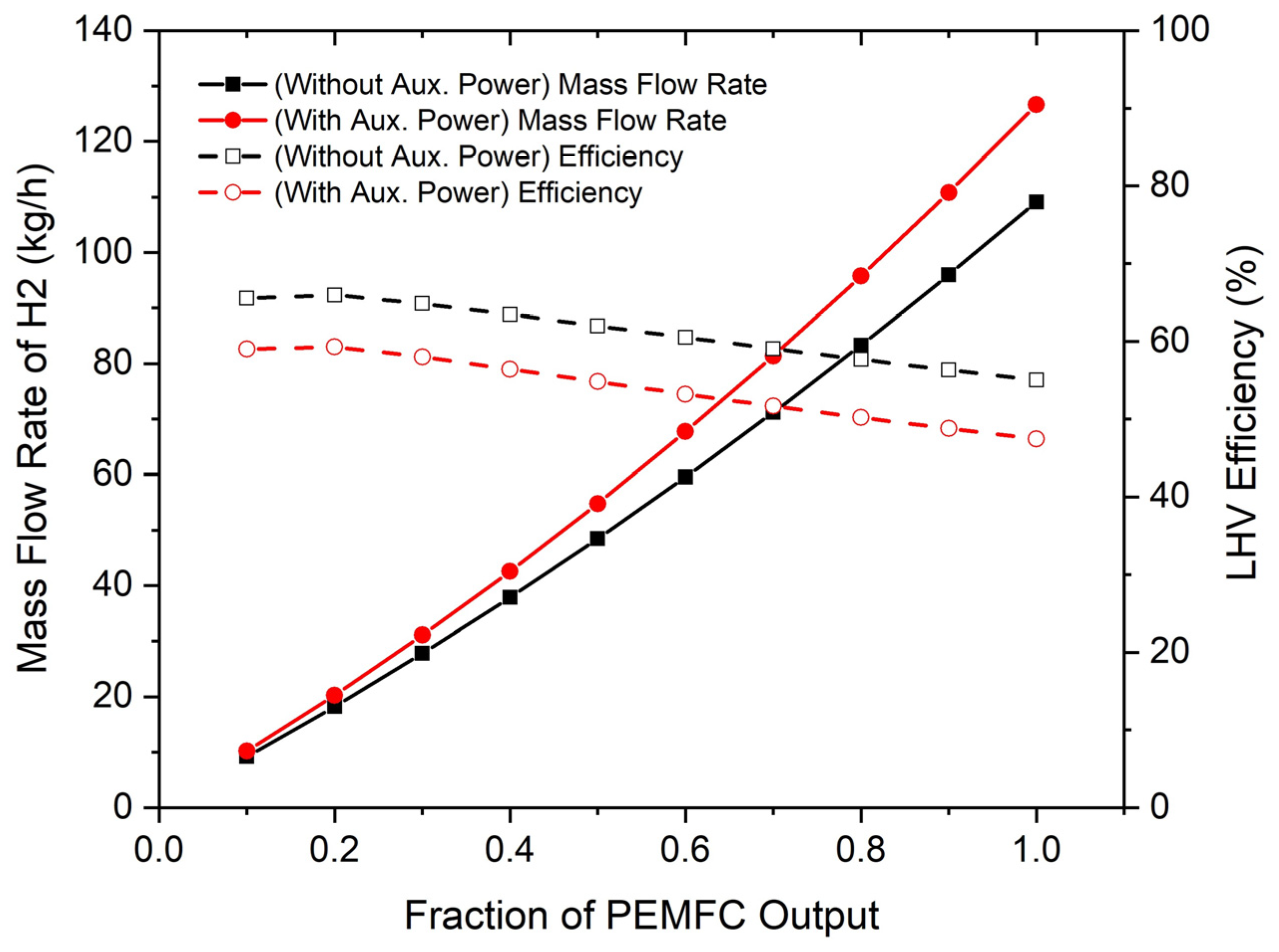
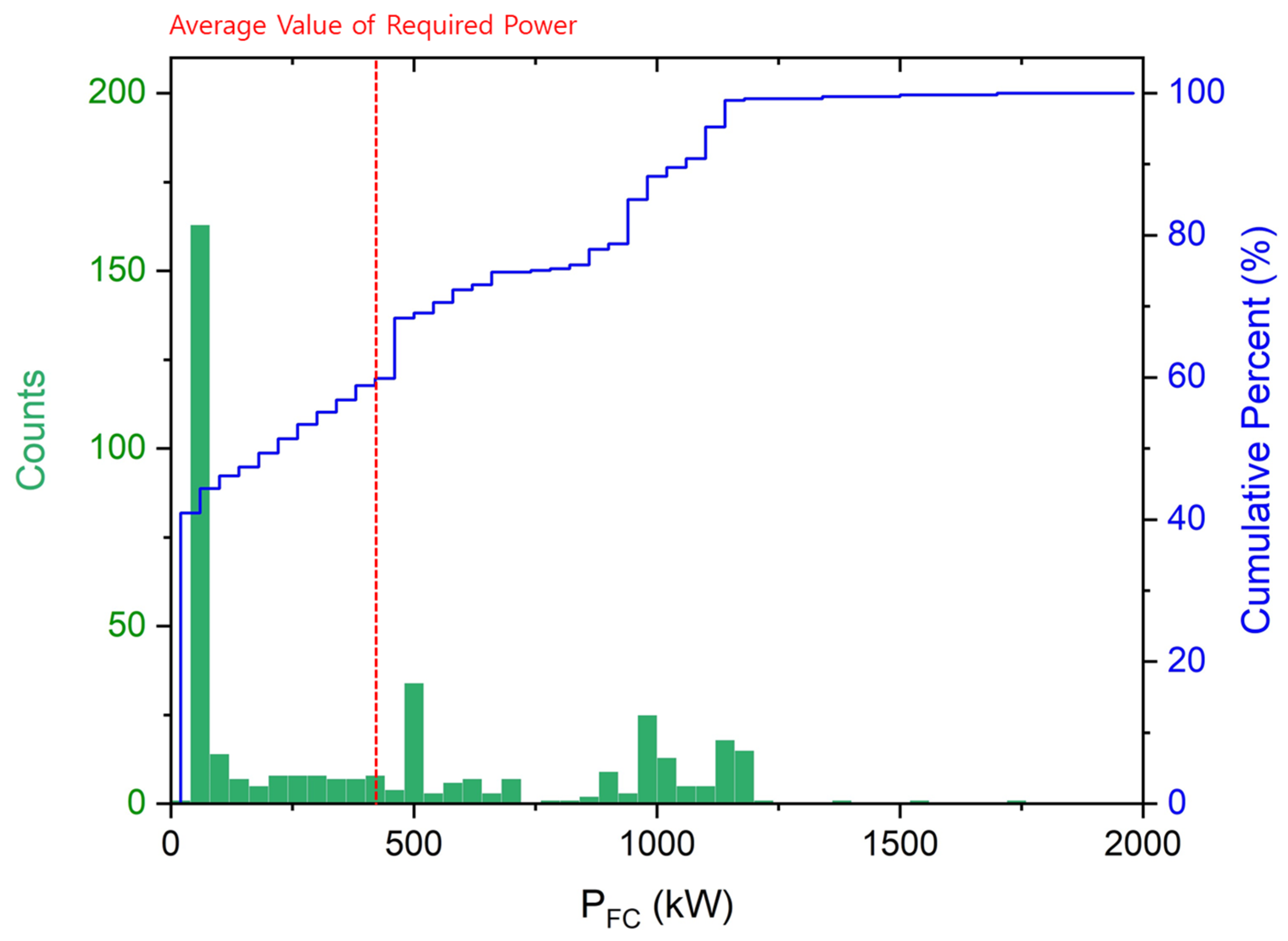
Figure 7 shows a histogram and cumulative percent of the PEMFC system’s power output counted in 30 min intervals using DRL-EMS for the reference operating profile. It is evident that, due to the decreasing LH
2-HSPS LHV efficiency as the PEMFC system output increases, the optimization has resulted in operation times at power levels lower than the average required power (~420 kW) for about 60% of the time. On the other hand, the system efficiency plot reveals that the system efficiency is highest when the PEMFC system output is 20% or less of its maximum value. The fraction of this average required power is 21%. In other words, DRL-EMS has been trained to operate within the maximum efficiency range of the PEMFC system as much as possible.
In the previous results, it is confirmed that approximately 90% of OPEX was incurred through hydrogen fuel consumption, indicating the necessity of saving hydrogen consumption for the efficient operation of LH
2-HSPS.
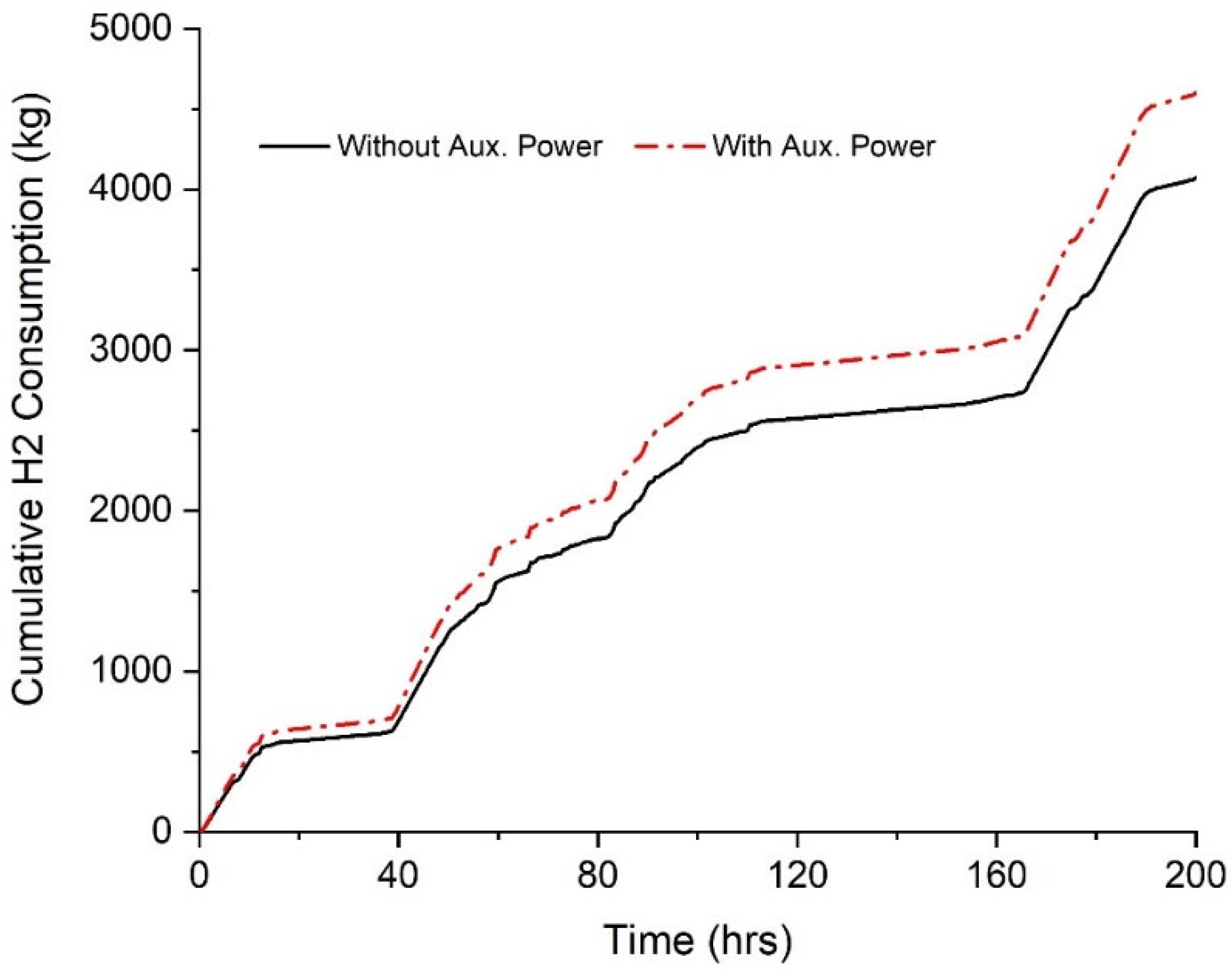
Figure 8 represents cumulative hydrogen consumption when using the same DRL-EMS but distributing power based on PEMFC stack efficiency instead of system efficiency. Without considering of auxiliary power, a total of 4074 kg of fuel was consumed, which is approximately 11% lower compared to the system efficiency-based calculation. Since ships have limited space for equipment relative to their capacity, the appropriate sizing of each piece of equipment should be determined in the design phase. When using LH
2 as fuel without a separate external power plant to supply BOP power required for ship propulsion, power must be supplied through the PEMFC system for propulsion. In this case, as explained earlier, there is a significant difference of about 11% in fuel consumption per operation, affecting the volume of the fuel tank. Therefore, the volume of the LH
2-powered ship’s fuel tank to be built in the future should be determined by thoroughly reviewing the system efficiency of LH
2-HSPS.
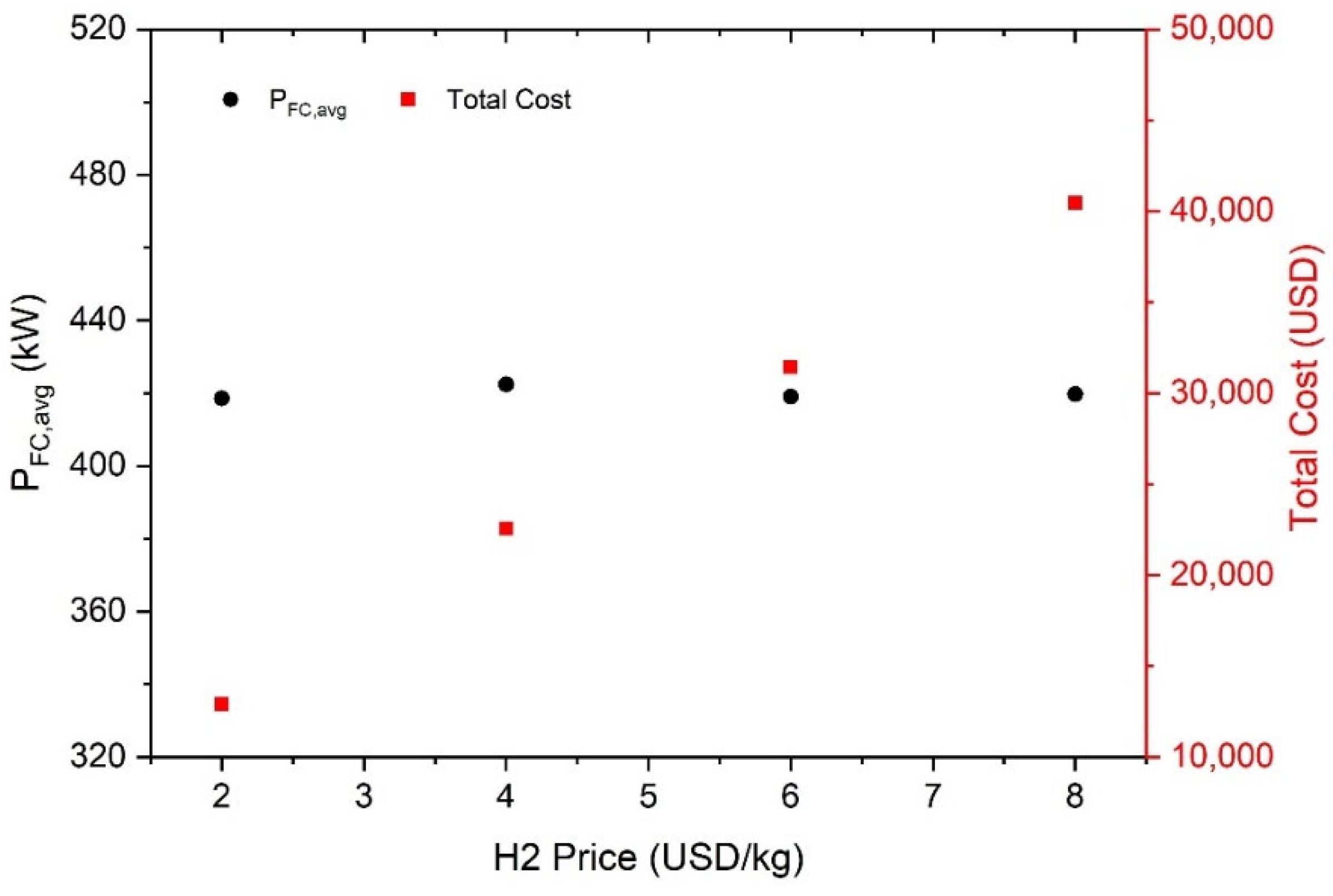
To further analyze the optimal energy management performance of the DRL-EMS, two sensitivity analyses are conducted. Among them,
Figure 9 represents the energy management results with different hydrogen fuel costs, which has the most significant impact on LH
2-HSPS’s OPEX. The training is performed for unit hydrogen fuel costs of 2, 4, and 6 USD/kg. The calculation results showed that the hydrogen fuel price exhibited a linear relationship with OPEX compared to the reference case. Additionally, when examining the average power generated by the PEMFC system in each case, it is found that nearly identical average power is produced in all cases. This implies that the change in hydrogen fuel price does not determine the operational strategy of LH
2-HSPS, and the decrease in OPEX is attributed to changes in hydrogen fuel prices rather than changes in the operating mode.
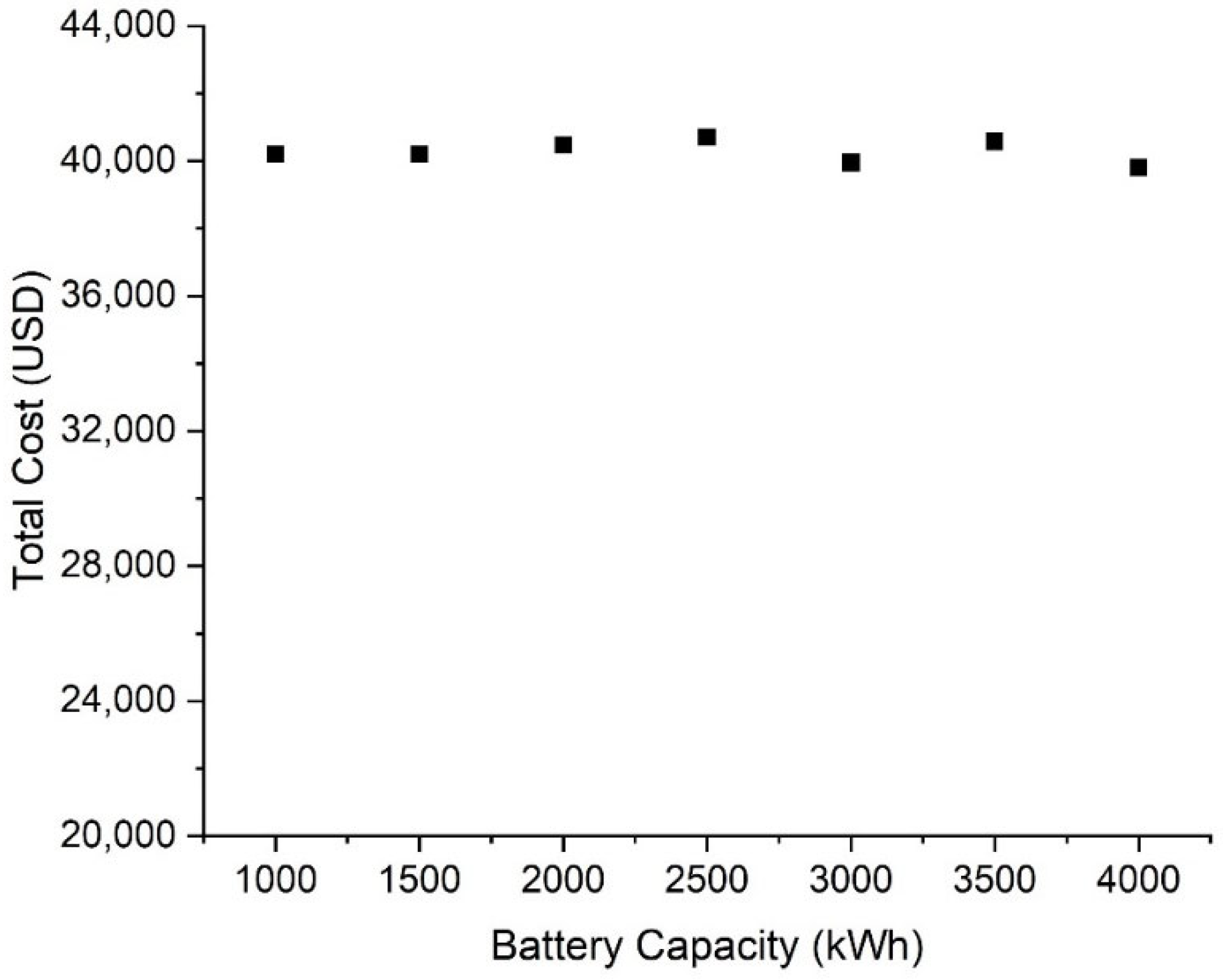
Furthermore, a sensitivity analysis of DRL-EMS performance with respect to battery system capacity can be shown in
Figure 10. Since the equivalent degradation cost of the battery system does not account for a significant portion of OPEX, LH
2-HSPS’s OPEX does not exhibit significant changes for all investigated battery system capacities. It showed a maximum difference of approximately 2.2% compared to the reference case (i.e., capacity of 2000 kWh). The increase in battery system capacity leads to a trade-off relationship with equivalent degradation cost under the same charging and discharging conditions due to the combined effects of system cost increase and C-rate decrease. Consequently, it is determined that this did not have a significant impact on the overall OPEX.
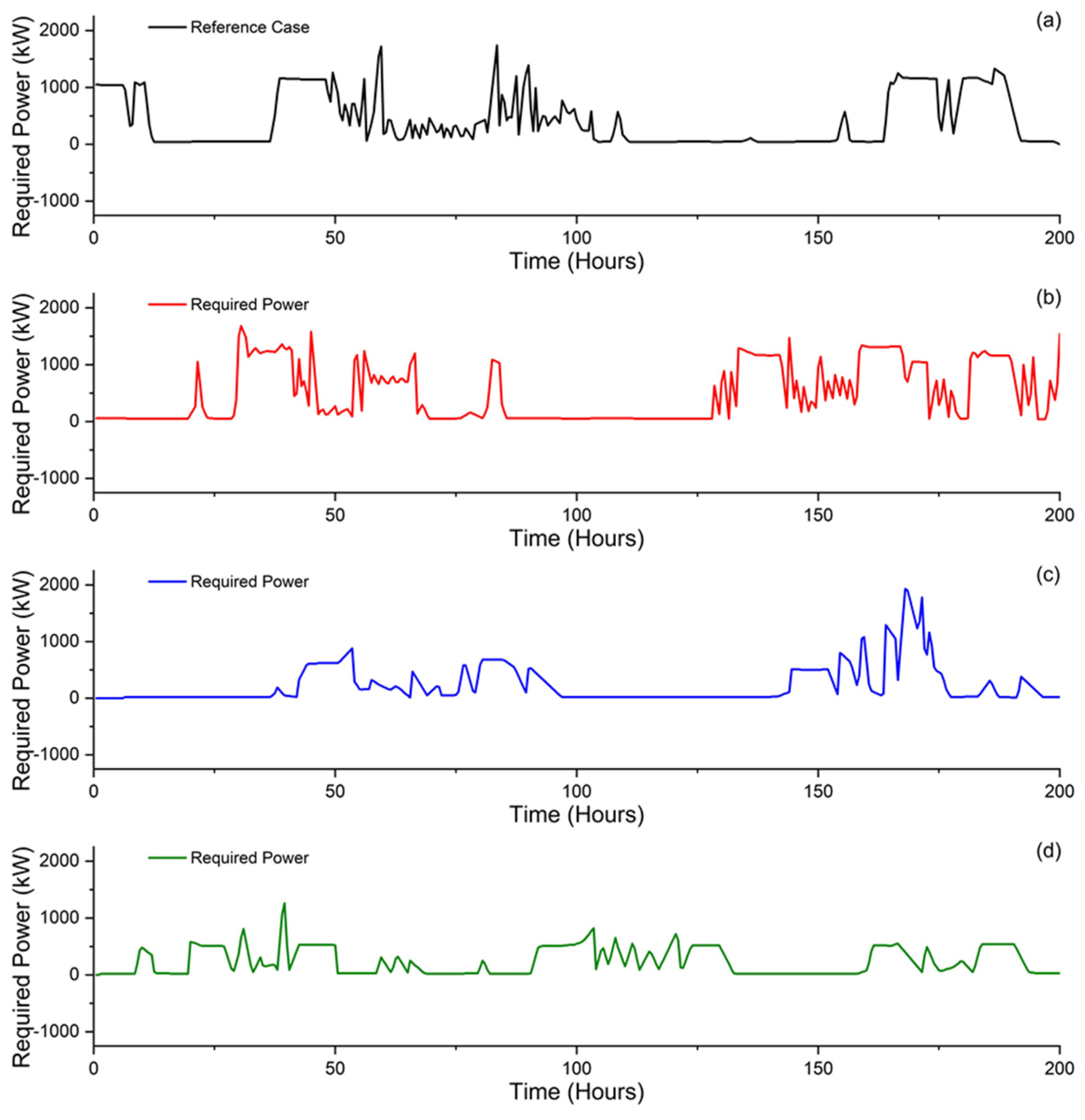
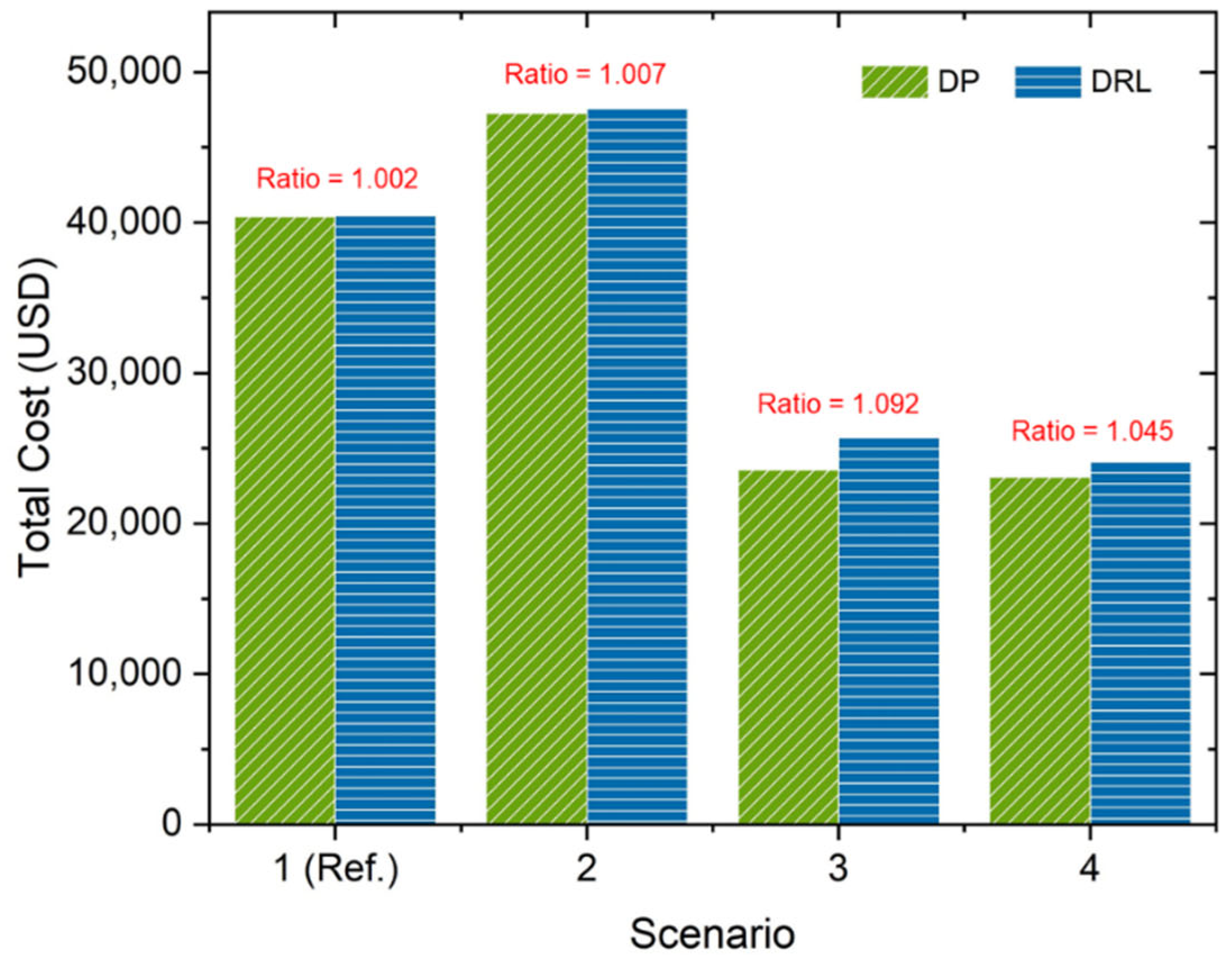
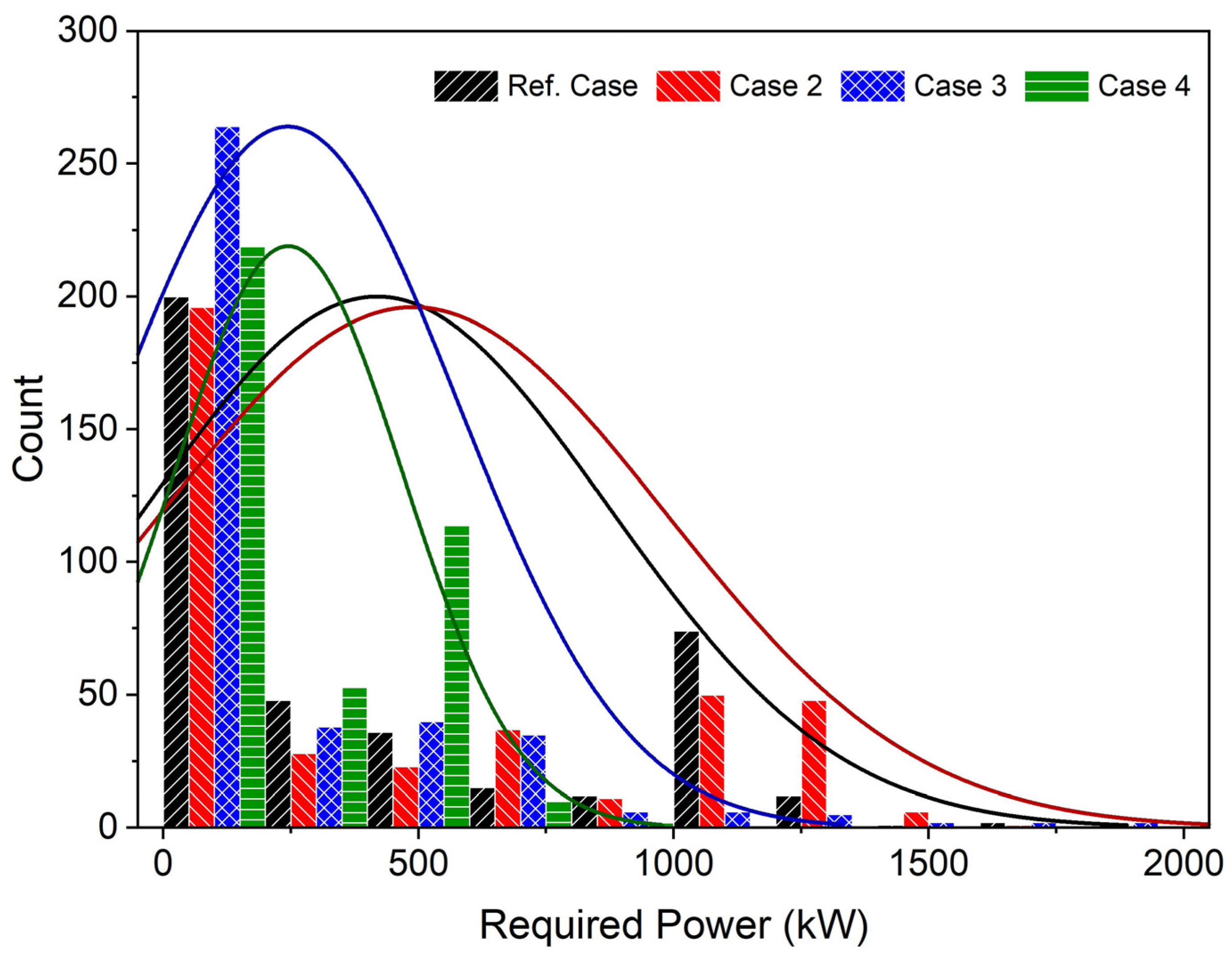
Finally, considering that various operation modes can occur during a vessel’s operation, the performance of DRL-EMS is evaluated on three additional operation profiles not used in the training. The calculation results showed that, depending on the cases, OPEX is higher by approximately 0.7% to 9.2% compared to DP-EMS (
Figure 11). Case 2, which demonstrated performance similar to DP-EMS, exhibited a distribution of power demand in the histogram that closely resembled that of DP-EMS. On the other hand, Case 3 and Case 4, which showed significant differences from DP-EMS, have distinct distributions of power demand compared to the reference case (
Figure 12). In essence, it is concluded that DRL-EMS’s performance could decrease when significantly different operations occurred compared to the required power variations used in its training. However, despite being arbitrary power demands not used in the training of DRL-EMS, the fact that they still show a maximum difference of up to 9.2% compared to DP-EMS indicates that DRL-EMS exhibits remarkable optimization performance, as compared to the results of SQP-EMS (
Table 6). Also, one of DRL-EMS’s advantages is its ability to use an agent trained under various operating conditions directly in actual operations. By continuously updating neural networks based on data obtained from equipment installed on real vessels and conducting ongoing training, it is expected that DRL-EMS can provide an effective EMS for diverse operations.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}