1. Introduction
Recent catastrophic incidents involving large ships, such as the MSC Napoli report [
1] and the MOL Comfort report [
2], show that dynamic load conditions may be one of the causes of structural failure. At present, the ultimate strength of a hull girder is usually evaluated under static loading conditions, and some partial safety factors are introduced to cover the dynamic effect. The whipping response of large ships has a higher frequency than the ordinary wave response; hence, the dynamic effects may provide additional strength reserves for the ship structure [
3]. A partial safety factor [
4] of 0.9 is proposed to reduce the effectiveness of the whipping moment in the ultimate strength check. For the lateral dynamic load condition, the dynamic strength of the beam under lateral impact could reach up to 1.4 times that of the static strength [
5]. There are some large differences related to the structural dynamic strength evaluation that require further study.
The dynamic ultimate hull girder strength of a container ship under bending moments was studied by using the non-linear FE method [
6]. The ultimate rotation of the cross-section around the neutral axis was used as the evaluation criterion to estimate the dynamic ultimate strength. When the duration of the dynamic bending moment was close to the natural period of the hull girder, the maximum cross-section rotation response was 1.6 times greater than that of the same amplitude of a static bending moment. The dynamic collapse under a whipping moment for a container ship was studied [
7,
8,
9] to find that the dynamic ultimate strength increased by 5.9~8.4% compared to the static conditions. Therefore, it is necessary to carry out more studies to find a reasonable justification for the evaluation criteria for dynamic strength.
Compared with static loading conditions, the inertia terms might not be negligible in the case of a dynamic response when the load duration time is shorter than the natural period of the box girder [
10]. The inertia force along the beam was commonly assumed to be linear under dynamic conditions, as proposed by [
11], which caused a time-varying bending moment distribution along the beam. When the load duration was very short, the box girder could not react immediately, and a time lag took place [
12]. These time lags caused differences between the external applied bending moment and the internal bending moment.
For a simply supported beam [
13], the beam initially deformed at the mid-span in the first impact stage, and thereafter, the impact effect propagated to the end supports. When the dynamic bending moment exceeds some degree, the beam exhibits part failures, such as plastic hinges [
14]. The local failure might present during the dynamic load action period and also might present during the free vibration stage after the action of the dynamic loads [
15]. It was useful to find the critical dynamic load, which induced severe damage, for the safety analysis of a box girder.
Based on the dynamic load application method, the dynamic model tests could be categorized into two categories: the water basin test and the drop hammer test. These tests can obtain the characteristics of the dynamic varying over time, which can be used to guide structural dynamic response analysis. The dynamic ultimate strength under an impact load will show the structural carrying capacity and failure mode.
In the water basin test, the girder structure should be simplified and have a lower capacity, which could be damaged by the hydrodynamic force due to basin waves. A one-degree-of-freedom beam model was used to simulate the bending stiffness and then study the collapse behavior under whipping loads by using a numerical method [
16] and the water basin test [
17].
The drop hammer test has often been used to study the dynamic capacity of different structures. Three-point bending tests [
18] were carried out to study the dynamic and quasi-static bending behavior of thin-walled aluminum tubes. A series of drop-weight tests [
19] were carried out for the double-hat structure under lateral impacts to show their crashworthiness performance. A series of repeated impact tests [
20] were carried out for in situ prestressed concrete sleepers, ranging from a low drop height to the limit drop height, where the ultimate failure occurred.
Several buckling criteria were proposed to determine the dynamic critical load, such as the B-R criterion [
21], the plate thickness criterion [
22] and so on. The B-R criterion states that dynamic stability loss occurs when the maximum plate deflection grows rapidly at a small variation in the load amplitude. The plate thickness criterion states that the dynamic critical load corresponds to the amplitude of the impact load at which the maximum plate deflection was equal to 0.5~1 times plate thickness. The box girder had more complex structures and a stable post-buckling path. It was necessary to study the evaluation criterion applicable to the dynamic ultimate moment of the box girder.
In summary, there are some problems that require further study, including the increase in the dynamic ultimate moment compared with static conditions, the expression of the dynamic ultimate moment index, critical dynamic-moment-induced girder failure and the evaluation criterion applicable to the dynamic ultimate moment.
In this paper, the box girder with the same cross-section scantlings and span length as the experiment [
23] was selected as the object of the analysis. Based on the non-linear FE method verified by experiment results, the dynamic ultimate bending moment and evaluation criterion are studied in detail. Then, the influence factors, including the model length, plate thickness, material density and load duration time, are discussed.
3. Non-Linear FE Analysis Method
The non-linear FE analysis method can be used to simulate the deformation failure process as the bending moment increases and obtain the ultimate strength of the bending moment by the extreme value of the load–deformation curve. Several parameters in the non-linear FE analysis, such as the boundary conditions, material properties, meshing density and imperfections, should be discussed and confirmed. The ABAQUS software is used in this paper.
3.1. Boundary Conditions and Loads
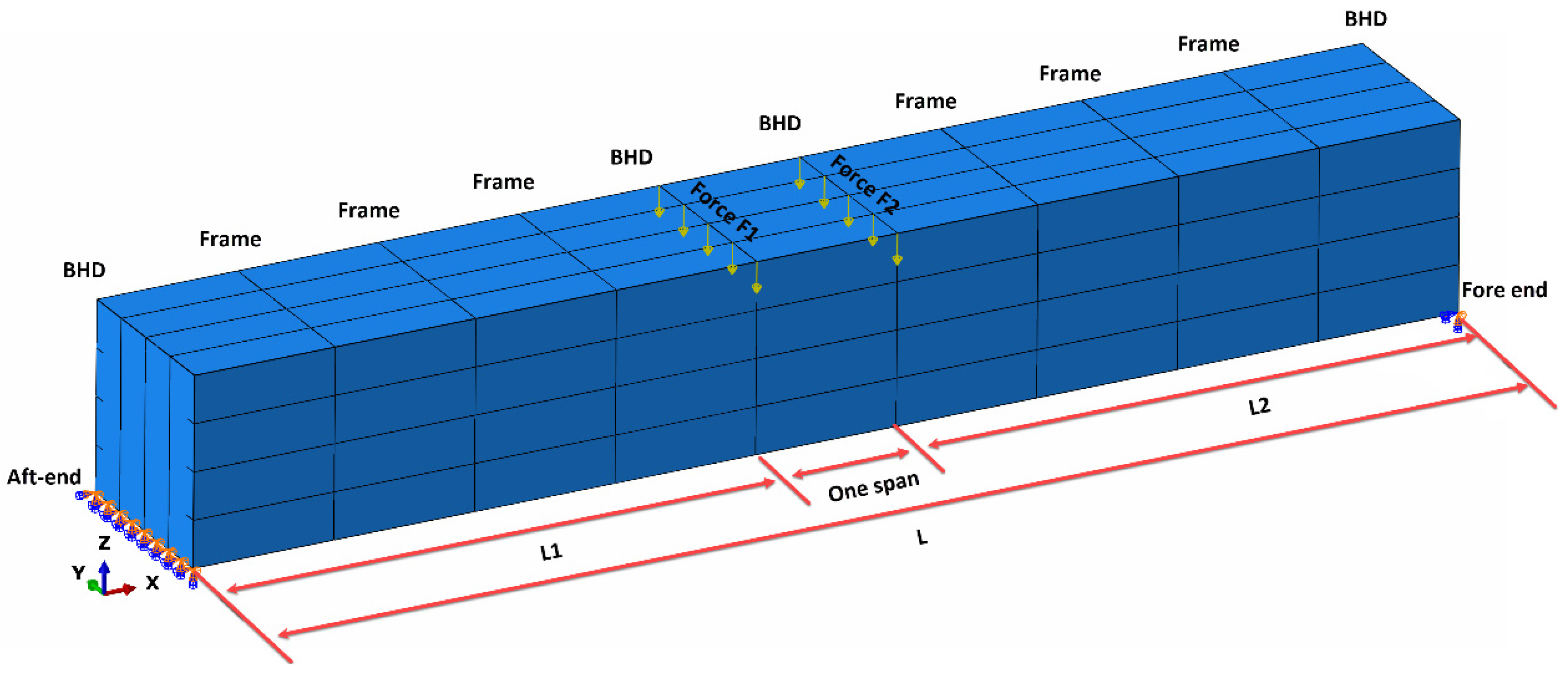
The coordinate system is defined as follows: X along the model length direction, Y along the model width direction, and Z along the model height direction.
The element type S4R for each element is chosen to simulate large deformation. This element has four nodes and six degrees of freedom in all nodes and a quadrilateral shape with reduced integration, hourglass control and a finite membrane strain.
The boundary conditions of the box girder are shown in
Figure 3. The box girder model is assumed to be simply supported at the two ends. The aft end is constrained by the displacement degree of freedom Ux = Uy = Uz = 0 and the rotational degree of freedom URx = URz = 0 at the bottom edge. The fore-end is constrained by the displacement degree of freedom Uy = Uz = 0 and a rotational degree of freedom URx = URz = 0 at the bottom edge. Two forces, F1 = F2, along the vertical direction (Z axis), are applied as nodal forces on the upper edge of the bulkhead (BHD).
The model width and height should include the whole section of the box girder. Usually, one-span or three-span are used to calculate the ultimate strength under static loading conditions. This paper will study the effect of more spans in the length direction on the dynamic ultimate strength.
3.2. Material Properties
As stated in the reference of [
27], the yield strength for steel is usually higher than its nominal strength due to the positive tolerance measured by the tensile test results. The material properties based on the Nishihara test are used in this paper. The material of plates and stiffeners is modeled with Young’s modulus of
E = 206,000 MPa, Poisson ratio
v = 0.3 and yield strength of
σY = 278 MPa. The material is assumed to be perfectly elastic–plastic without a strain-hardening effect.
In the case of considering the strain rate, the Cowper–Symonds model has proven to be applicable for steel structures by experiment results [
28,
29], as seen in the following Equation (1).
where
denotes the dynamic stress,
denotes the static stress;
D and q are the material parameters.
D = 40.4, q = 5 is used for the mild steel in the present study.
3.3. Meshing Density
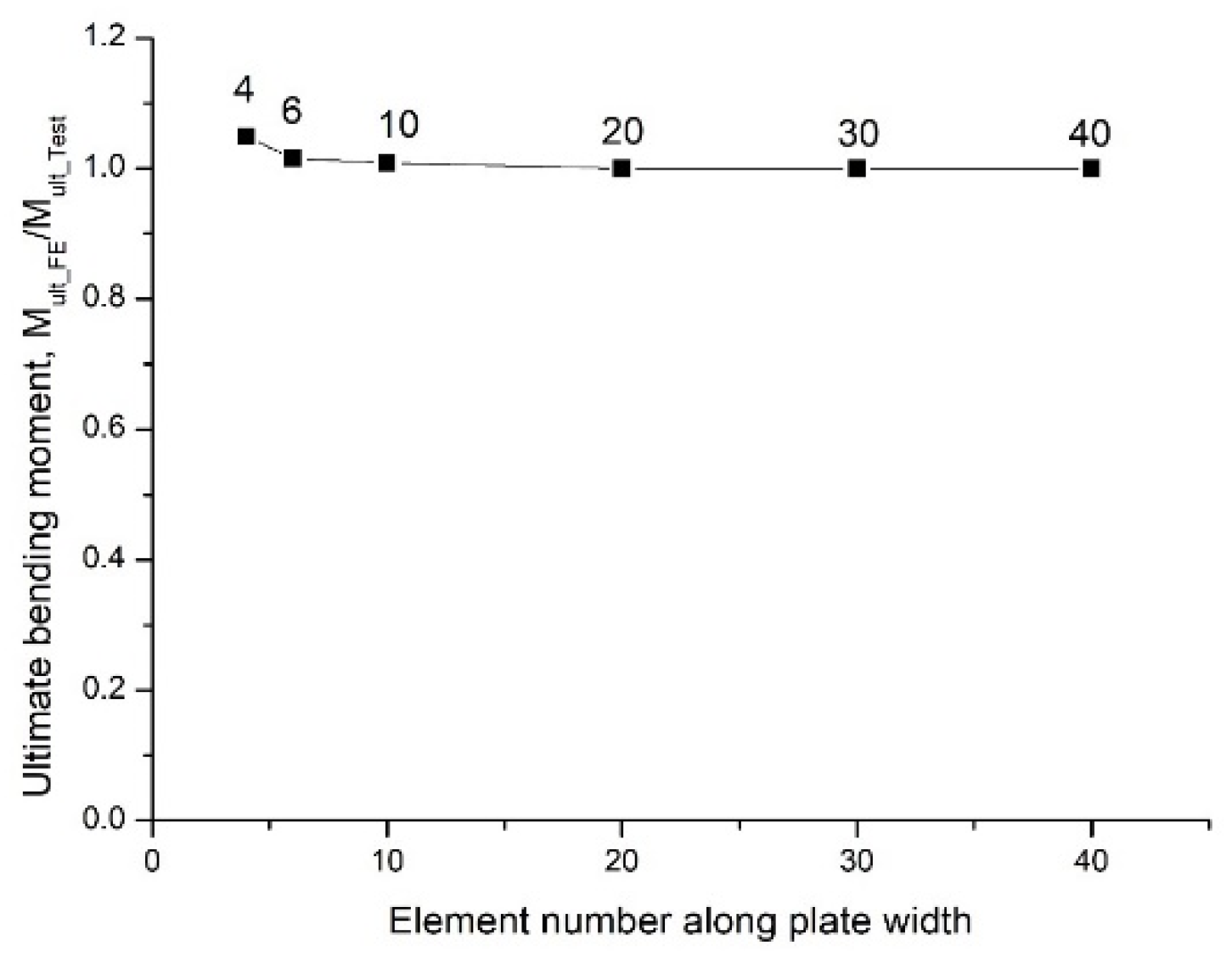
Generally, a rectangular element with a length–width aspect ratio close to 1.0 was chosen for the non-linear FE analysis. Under the static loading condition, the meshing density of 6~10 elements in one plate width is enough to obtain a reasonable calculation result.
Figure 4 shows that the calculation results of the ultimate bending moment of the box girder with 10 elements along one plate width is a little lower than that with four or six elements. The initial imperfection of two half-waves with an amplitude of 0.9 mm is applied in the analysis. When the element number exceeds 10, the calculation results of the ultimate bending moment show a stable value.
In the dynamic explicit calculation method, the stability limit of the calculation has a relationship with the characteristic element length, i.e., the minimum element length. The shorter the element length is, the shorter the calculation time of the increase step. In order to control the calculation time of the structural response, it had better not use an overfine mesh density. In the following analysis, a mesh density with 20 elements along one plate width was used, as shown in
Figure 5. The meshing size is about 9 mm for the FE analysis. There are 20 elements along the plating width, 60 elements along the plating length, six elements along the stiffener web height and eight elements along the frame web width.
3.4. Initial Imperfections
For the simply supported plate, the buckling half-wave number
m in plate length direction can be estimated by using the following Equation (2):
where a is the plate length,
b is the plate width and
m is the buckling half-wave number.
For the box girder in this paper, a = 540 mm and
b = 180 mm; therefore, the buckling half-wave number is
m = 3. In order to trigger the failure mode, the initial imperfection can be assumed as the buckling mode with three half-waves in the plate length direction and one half-wave buckling mode in the plate width. This paper also considers the effect of initial imperfection with two half-waves and four half-waves in the plate length direction, as shown in
Figure 6. The initial imperfection is applied to the compressed upper panel of a box girder under the bending moment.
The effect of various imperfection types and various imperfection amplitudes on the ultimate bending moment of a box girder is shown in
Figure 7. When the amplitude of the initial imperfection is the same, the imperfection with three half-waves gives the lowest estimation of the ultimate bending moment. For the same type of imperfection, the ultimate bending moment almost shows a linear reduction with the increase in the imperfection amplitude.
In the following analysis, the initial imperfection type is assumed to be in the three-half-wave buckling mode in the plate length direction, and the imperfection amplitude is assumed to be b/200 = 180/200 = 0.9 mm. This assumption is often adopted in ship rule research in the IACS (2014) classification societies.
The comparison of non-linear FE results and experiment results is shown in
Figure 7. Through the use of FE analysis, the ultimate bending moment of the box girder is M
ult_s = 5.74 × 10
8 Nmm, and the displacement of the mid-span at the limit state is W
ult_s = 14.6 mm. The value of the ultimate bending moment and displacement at the limit state by FE is almost close to the experiment result under the static condition. However, the load and displacement curves of the FE results and experiment results are not perfectly consistent. Perhaps, there are some differences between the actual imperfection in the experiment and the assumed imperfection in the FE analysis.
Under the static load conditions, the Riks method is used to carry out non-linear ultimate strength analysis. Riks’ method is based on the load increment controlled by a scalar parameter of the arc length. In the following dynamic analysis, the Riks method should be replaced by the Dynamic Explicit solver, which is based on the central difference algorithm and easily obtains the convergent solution.
4. Dynamic Ultimate Strength of Box Girder under Bending Moment
The validated non-linear FE analysis method, including the boundary conditions, material properties, meshing density and initial imperfection, are extended to calculate the dynamic response of the box girder. Compared with the static load conditions, several differences should be specially considered in dynamic analysis in the time domain, including mass density, strain rate and the load change over time.
Based on the box girder of MST-3 in the Nishihara experiment, six box girder models are designed with the same cross-section scantlings and span length, as listed in
Table 2. Compared with each model, the model length, plate thickness and material density have a slight difference in order to study the relevant influence factors.
The ultimate bending moment under the static conditions is also listed in
Table 2. Models M1, M2, M5 and M6 almost have the same ultimate bending moment. That is to say, model length and material density have little effect on the calculation results under static conditions. However, the natural vibration periods of the six models are different. Therefore, the dynamic response of these models may also be different under the same dynamic loads.
4.1. Dynamic Bending Moment of Box Girder
The dynamic loads of F1 = F2 are applied to the upper edge of the bulkhead (BHD), as shown in
Figure 3. Based on the water basin test of the girder under whipping loads [
17] and the falling hammer test of the girder under impact loads [
19], the load time history in the action period can be simplified as a half-sine shape with time. Therefore, the dynamic loads are assumed as a half-sine shape in this paper. The mid-ship bending moment can be evaluated according to the theory of simple support girder [
30]. The external applied bending moment by the applied load at the mid-span of the box girder can be calculated as following Equation (3):
where
t is the response calculation time,
is the load duration time,
Te is the excitation period
Te = 2 ∗
Td,
is the applied dynamic load amplitude and
L1 the distance between the applied load position and the pinned point.
As the load duration time Td is changed, the excitation period Te will be updated, leading to a specific ratio to the natural vibration period T0 of the box girder.
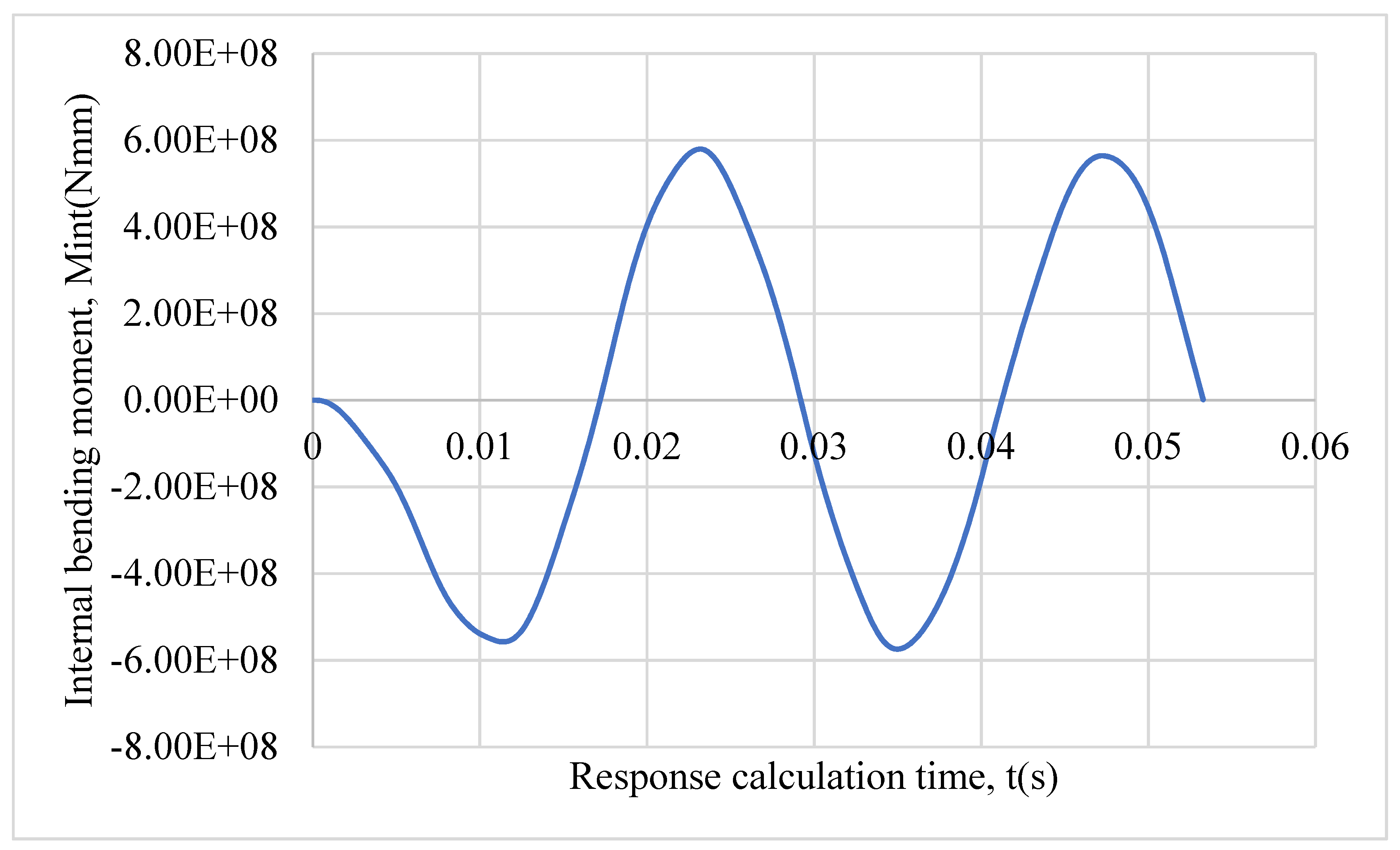
The external applied dynamic bending moment will be withstood by the box girder deformation and inertia forces. Owing to the box girder deformation, the internal bending moment at each cross-section can be derived. Under the static load conditions, the internal bending moment is equal to the external applied bending moment at the same cross-section. However, under dynamic load conditions, the internal bending moment may be smaller than the external applied bending moment due to the inertia effect when the dynamic duration time is very short.
In the early dynamic stage, the internal moment at the mid-span is large and the upper stiffened panel is in compression, which is similar as the sagging moment. After the peak of the dynamic load, the bending moment at the mid-span reduces progressively, and then the opposite bending deformation of the box girder may be activated, leading to the opposite value of the internal bending moment, which is similar to the hogging moment. Therefore, the sagging–hogging internal moment will occur and alternately change over time, as shown in
Figure 8. When the applied external bending moment reduces to 0 at a response calculation time of
in Equation (3), the internal bending moment will still occur due to the girder vibration deformation.
The external applied bending moment is taken as the capacity index of the box girder in this paper, which is convenient for evaluating the external dynamic load condition.
4.2. Dynamic Response of Box Girder under Bending Moment
For the M2 box girder, a series of different amplitudes of dynamic bending moment M
d are applied as a sinusoidal shape, including 1.0M
ult_s, 2.0M
ult_s, 3.0M
ult_s and 4.0M
ult_s. The load duration time is taken as
Td = 0.005 s, which is close to the drop hammer impact time in the experiment on the box girder [
31]. The load duration time
Td is about 0.2 times that of the natural vibration period
T0 of the M2 box girder. Therefore, the box girder will show an apparent dynamic response under this load assumption.
The response calculation time includes the load duration time and two vibration periods, with no external applied loads to evaluate the free vibration response after the dynamic load action stage. The response calculation time is divided by half of the natural vibration period of T0.
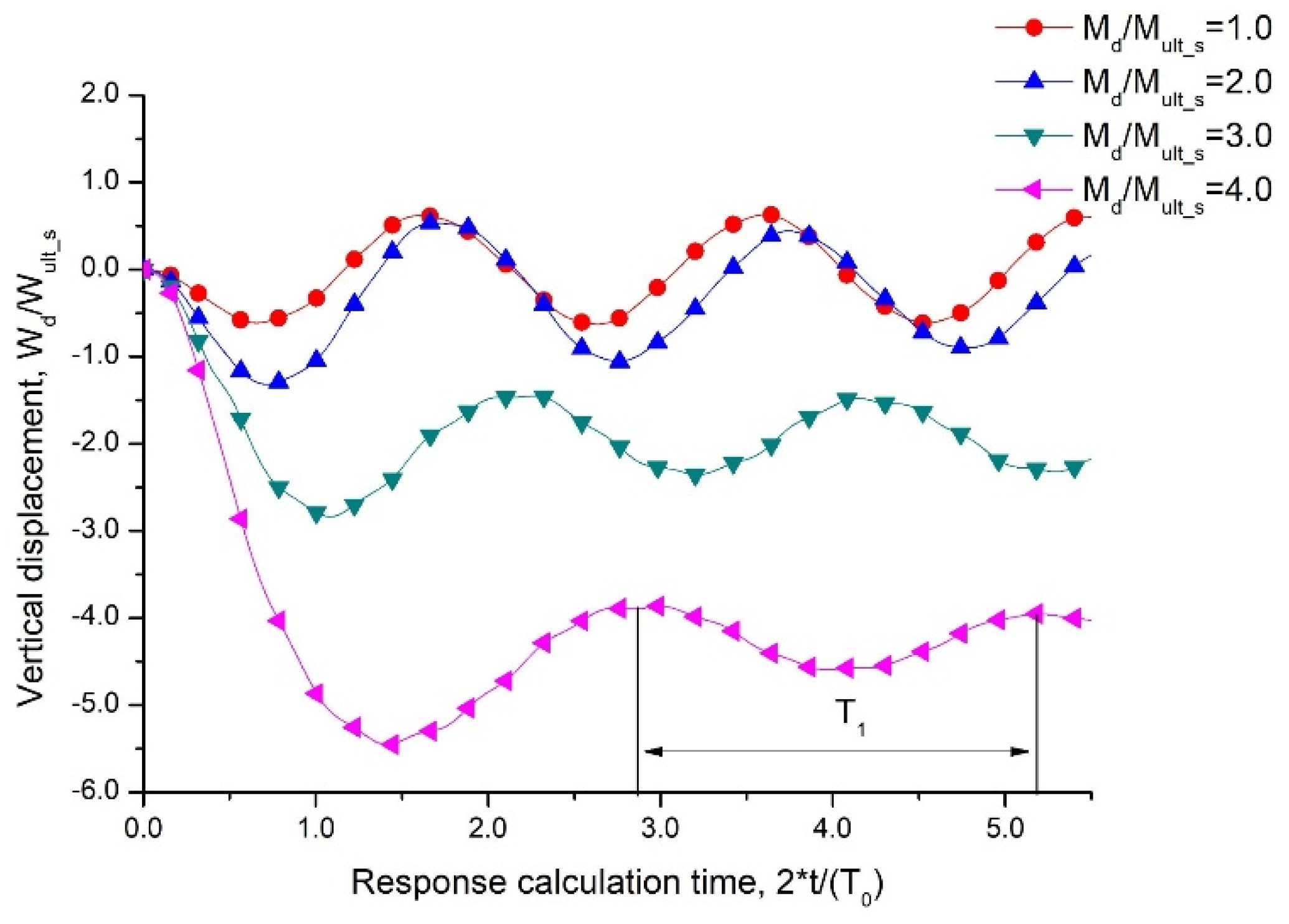
The vertical displacement Wd at the mid-span is derived by averaging all of the node displacements of the cross-section and then divided by the limit displacement Wult_s of the same cross-section under a static bending moment. This treatment can yield a dimensionless index of vertical displacement and is convenient for comparing the dynamic and static responses.
The vertical displacement responses at the mid-span as the response calculation time for the M2 box girder are shown in
Figure 9. For M
d = 1.0 M
ult_s, the box girder shows an elastic response, and the hogging (bending upwards)–sagging (bending downwards) vibration deformation amplitude is almost symmetrical. For M
d = 2.0 M
ult_s, the sagging deformation is larger than the hogging. For M
d = 3.0 M
ult_s, the vibration mode has been changed, and the value of dynamic deformation is always negative due to the large plastic deformation after dynamic load. For M
d = 4.0 M
ult_s, the vibration period T
1 (between two neighboring peaks in the free vibration stage) after dynamic load action exceeds the natural vibration period
T0 due to large failure areas induced by local buckling and plastic deformation.
The Mises stress and deformation distribution at the time of the maximum vertical displacement for the mid-span of the M2 box girder are shown in
Figure 8. Only in the load case of M
d = 1.0M
ult_s was the stress lower than the static yield strength. The maximum value of the Mises stress for the load case of M
d = 4.0M
ult_s is about 400 MPa, which is higher than the static yield strength. Based on Equation (1), the strain rate for the box girder is about 1/s~10/s, which shows the dynamic characteristics.
The deformed shape is also shown in
Figure 10. There are three half-wave buckling modes in the upper panel of the box girder. The difference between load case M
d = 2.0M
ult_s and M
d = 3.0M
ult_s is evident. For load case M
d = 2.0M
ult_s, there is one cross-section with apparent deformation. However, for load case M
d = 3.0M
ult_s, there are three cross-sections with apparent deformation at the same time, which is different from the limit deformation under static load conditions.
4.3. Evaluation Criterion of Dynamic Ultimate Strength for Box Girder
Based on the relationship between dynamic loads and structural dynamic responses, the dynamic ultimate strength evaluation is meaningful in guiding structure design and safety evaluation. However, the bending moment and vertical displacement curve under dynamic loads will not show an extreme value or sudden change because of the stable post-buckling path for the box girder. A reasonable evaluation criterion for dynamic ultimate strength is needed.
The B-R criterion [
21] was proposed to evaluate the dynamic buckling of a plate. For box girders with stiffened panels, plate buckling can be regarded as one kind of local buckling. The box girder will have a stable post-buckling path, so the load–displacement will not present a severely rapid increase as the plate buckling. The B-R criterion should be revised based on the response characteristics of the box girder under a dynamic bending moment.
The internal bending moment can be derived based on the bending stresses and their locations in the cross-section of a hull girder. The curve of the internal bending moment and vertical displacement at the mid-span section is shown in
Figure 11. The applied bending moment ratio (M
d/M
ult_s) is also plotted in
Figure 11 using data labels.
When the applied bending moment ratio is small, i.e., Md/Mult_s < 1.4, the vertical displacement shows an almost linear trend of increase as an increase in the bending moment. When the applied bending moment ratio is 1.4 > Md/Mult_s < 2.0, the curve of the internal bending moment and vertical displacement becomes non-linear, which denotes some local failure induced by buckling and yielding occurring on the box girder. When the applied bending moment ratio is Md/Mult_s ≥ 2.0, the internal bending moment at the mid-span of the box girder reaches its peak value. The internal bending moment will not increase as the applied bending moment, but the max displacement at the mid-span shows a rapid increase. It is an obvious signal that the box girder has reached its dynamic limit state. Therefore, the evaluation criterion of the dynamic limit state of the box girder is the curve of the internal bending moment, and vertical displacement reaches the extreme point.
For the load duration time of
Td = 0.01 s and
Td = 0.016 s, the curves of the internal bending moment and vertical displacement are shown in
Figure 12 and
Figure 13. The same trend of the extreme point can be found. The proposed evaluation criterion of the dynamic limit state can be applicable to more load cases.
The applied bending moment at the dynamic limit state for the load duration time
Td = 0.005 s,
Td = 0.01 s and
Td = 0.016 s are summarized in
Table 3. As the load duration time increases, the dynamic effect for the box girder is not very obvious, and the applied bending moment at the dynamic limit state will approach the ultimate bending strength at the static limit state.
5. Influence Factors on Dynamic Ultimate Strength of Box Girder
For box girders, there are several influencing factors on dynamic ultimate strength. This paper tries to study these four factors, including model length, plate thickness, material density and load duration time.
5.1. Effect of Model Length
Each span of the box girder is strengthened by transverse frames or bulkheads at two ends. The model length is set as the product of span number and span length. The box girder M1 has seven spans and a 3780 mm model length. The box girder M2 has 11 spans and a 5940 mm model length. The ratio of model length L and span length S appears to be a non-dimensional parameter. Both models have the same cross-section scantlings and span length. These models are assumed to have the initial imperfection of the three half-wave, with an amplitude of 0.9 mm of mid-span.
As we all know, the span number in the analysis model has little effect on the static ultimate bending moment when the span number is larger [
32] and the span length is kept unchanged. Therefore, two- or three-span FE models are often used in static ultimate strength analysis for box girders.
Under dynamic conditions, the curve of the internal bending moment and vertical displacement at the mid-span section for the M1 box girder with load duration times of
Td = 0.005 s and
Td = 0.016 s are shown in
Figure 14 and
Figure 15. Based on the proposed evaluation criterion, the applied bending moment ratio M
ult_d/M
ult_s at the dynamic limit state is listed in
Table 4. For the load duration time
Td = 0.005 s, the dynamic ultimate moment of box girder M1 (length ratio L/S = 7) is lower than that of box girder M2 (length ratio L/S = 11). However, for a load duration time of
Td = 0.016 s, there is no obvious dynamic effect, and the ultimate moment of box girder M1 and M2 is the same. It can be concluded that the model length ratio has a great influence on the dynamic ultimate moment at shorter load duration times. The longer model shows a larger dynamic carrying capacity. There are two reasons to explain this phenomenon. (1) The longer model has a greater inertia load along the model length direction, which needs a greater applied load to cause structural failure; (2) the longer model has a longer first vibration period, which shows more obvious dynamic effects for the load with duration time less than the first vibration period. It is recommended that a full-length model should be used in dynamic strength analysis instead of the simplified one-span model.
5.2. Effect of Plate Thickness
The plate thickness is the critical parameter of structure stiffness. Three kinds of plate thickness
tp are set on the plate and stiffener web of the box girder. For box girders M2, M3 and M4, the plate thicknesses are
tp = 3.05,
tp = 4.0 and
tp = 5.0, respectively. The plate slenderness ratio
β can be considered a non-dimensional parameter. As the plate thickness increases, the natural vibration period
T0 has a little decrease, as shown in
Table 2.
The curve of the internal bending moment and vertical displacement at the mid-span section for box girder M3 and M4 with a load duration time of
td = 0.005 s are shown in
Figure 16 and
Figure 17. The comparison of dynamic ultimate moment for box girder with a plate slenderness ratio of
β is listed in
Table 5. As the plate slenderness ratio of
β changes, the applied bending moment ratio at the dynamic limit state is almost unchanged. That is to say, the dynamic effect for these girders will show a similar trend for the dynamic load with the same load duration time. It should be noted that the actual dynamic bending capacity of models M3 and M4 is higher than that of model M2 due to the increased static ultimate strength M
ult_s, as shown in
Table 2.
5.3. Effect of Material Density
In actual ship structures, the box girder should withstand its structural weight and non-structure weight, including liquid/dry cargo, ballast water and fuel oil and so on. For dynamic response analysis, the changes of the mass point and density are often used to simulate various mass distribution conditions. The change in density is used in this paper to study the effect of mass distribution on dynamic ultimate moment.
In order to model the supplementary onboard distributed masses, two other kinds of equivalent material density are assumed in models M5 and M6, as shown in
Table 2. The box girders of M5 and M6 are set as two times and three times of material density of M2, respectively. Although M2, M5 and M6 have the same cross-section scantlings, the box girders of M5 and M6 have longer natural vibration periods than that of M2, as shown in
Table 2.
The bending moment and vertical displacement curve of the applied bending moment and vertical displacement at the mid-span section for box girders M5 and M6 with a load duration time of
td = 0.005 s are shown in
Figure 18 and
Figure 19. The relative density between the analysis model and the based model (M2) is defined. A comparison of the dynamic ultimate moment of the box girders with various densities is listed in
Table 6. The larger the model’s relative density, the higher the dynamic ultimate moment ratio. Material density should be assumed to be a critical factor in dynamic ultimate strength analysis.
5.4. Effect of the Excitation Period
This paper assumes that the dynamic load has a half-sine shape and the start time as the beginning of the response calculation. The load duration time Td is set from 0.004 to 0.025 s, which covers the scope of drop hammer impact on stiffened panel of steel and also the interval of box girder vibration period. The excitation period is two times that of the duration time, i.e., Te = 2 × Td. The ratio Te/T0 between the excitation period and the natural vibration period can be considered a non-dimensional parameter.
The comparison of dynamic ultimate moment ratio of box girder with various load excitation period ratios
Te/
T0 is listed in
Table 7. The shorter the load duration time ratio, the larger the dynamic ultimate moment. The dynamic ultimate moment ratio M
ult_d/M
ult_s is within the scope from 1.0 to 2.5 for the load duration time ratio of larger than 0.3. When the load excitation period ratio
Te/
T0 is larger than 1.3, the dynamic effect is not very obvious for box girder under bending moment.
Based on the FE results evaluated by proposed criterion, the relationship of dynamic ultimate moment ratio M
ult_d/M
ult_s and the load excitation period ratio
Te/
T0 is plotted in
Figure 20. When the load duration time ratio increases, the dynamic ultimate moment ratio gradually decreases.
6. Conclusions
The main conclusions can be drawn as follows:
(1) Under larger applied dynamic moments, the box girder vibration period will be increased due to local buckling and plastic deformation. In the dynamic loading case, there are more than one cross-section with apparent deformation at the same time, which is different from only cross-section failure in the static loading case.
(2) An evaluation criterion of dynamic limit state for box girder under bending is proposed in this paper based on the curve of internal bending moment and vertical displacement, which can give reasonable prediction of dynamic ultimate strength.
(3) The model length has a great influence on the applied dynamic ultimate moment at shorter load duration times. The longer model needs a larger dynamic moment to reach the limit state. The full-length model is recommended to use in dynamic analysis.
(4) The larger the relative density of the box girder, the higher its dynamic ultimate moment ratio Mult_d/Mult_s due to the inertia effect. The material density should be considered a critical factor in dynamic ultimate strength analysis.
(5) When the load excitation period ratio Te/T0 is larger than 1.3, the dynamic effect is not very obvious for box girder bending, and the load action will be close to the quasistatic condition. For the load excitation period ratio Te/T0 with the scope of 0.3 and 1.3, the dynamic ultimate moment ratio Mult_d/Mult_s is within the scope of 2.5 to 1.0.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}