1. Introduction
Motorboats are divided into several categories according to their usage, including, but not limited to, lifeboats used for survivors, yachts for entertainment, and unmanned surface vessels (USVs) for scientific research. Determining how to steer efficiently is crucial to navigation safety, environmental protection, and research on autonomous ships, which are closely related to the productivity and livelihood of various stakeholders.
The steady turning motion of a vessel can influence movement performance [
1]. These parameters are printed in the wheelhouse poster, which is posted in a conspicuous space on the bridge for officers or pilots [
2]. Many alternative methods are available for the modeling schemes of vessels, such as the mechanism model, computational fluid dynamics (CFD), and the identification model. However, the actual effectiveness of these solutions in nautical practice and their applications still deserve further study.
In the last decade, the mechanism model, represented by the Abkowitz [
3] model or the maneuvering mathematical modeling group model (MMG) [
4], has provided a standard solution to this problem for the shipping industry [
5]. For example, the mechanism model is used to perform a quick check for ship design to determine whether the ship meets the IMO criteria [
6]. This is a framework used to investigate a mathematical model for a ship maneuvering simulator, such as the ship–ship interaction related to restricted water areas [
7]. Furthermore, it is also a means of verifying the effectiveness of the numerical [
8] method or system identification method [
9]. One of the mechanism model’s core technologies is obtaining the hydrodynamic derivatives for a mathematical model of ship maneuvering motion. These can be obtained using captive model tests [
7], system identification techniques applied to free-running model test results [
10], or numerical computations [
8]. However, this model depends on towing tanks with a certain amount of investment. Few institutions worldwide can meet the needs of basic research. These constraints make modeling the movement of motorboats difficult.
The CFD scheme was successfully applied for form-changeable boats [
11], the dynamic behaviors of drifting ships [
12], a high-speed planning boat [
13], and flying boat planing [
14]. Meanwhile, there have been many research achievements in the applciation of combinations of CFD and mechanism model methods. Sukas et al. used a URANS approach to obtain hydrodynamic derivatives and then implemented them in an MMG model for a twin-propeller/twin-rudder ship [
15]. Sakamoto et al. proposed a similar CFD-MMG approach [
16]. However, the computational burden of this scheme is heavy due to the large computational grid. Moreover, the verification data limit its application in engineering.
The identification scheme is another important method. Abkowitz [
17] identified the Esso Osaka model with 59 parameters using an extended Kalman filter. However, some variables in this training set are easily disturbed during measurements, such as sway velocity and yaw rating. In addition, there are effects of drift parameters and dynamic cancelation. Subsequently, Källström et al. [
18] used the pseudorandom binary sequence (PRBS) signal to excite the system, but this may reduce the safety of the ship in practice [
19]. According to [
20,
21,
22], the data in the model or full-scale tests can reduce this risk. There are other ways to cope with the nonlinearity of ship maneuvering motion. Bai et al. proposed using locally weighted learning to approximate the nonlinear function using segmented linear functions [
23]. Ouyang et al. explored the use of Gaussian process regression optimized by a genetic algorithm [
24], local Gaussian process regression [
25], Gaussian process regression [
26], and adaptive hybrid-kernel function-based Gaussian process regression [
27] to conduct research on ship nonlinear motion modeling and obtained satisfactory results. However, these methods depend on the numerous states of ship movement. Some variables, such as sway speed or yaw rating, are easily disturbed by the external environment and are challenging to collect in practice. Therefore, these studies may be limited in practical application.
A classical scheme is used to identify the maneuvering indices of
K and
T in the Nomoto model [
28]. When the Nomoto model is combined with the linear mathematical model of the ship [
3], the linear hydrodynamic derivatives are estimated by Clarke’s regression formula [
29] using seven parameters. We can then approximate the indices of
K and
T using these derivatives. However, this linear model applies to a small and medium rudder angle and is sensitive to speed. Perera et al. [
30] proposed a modified nonlinear steering model to expand the range of working conditions. Subsequently, they performed a second-order Nomoto model with nonlinear constraints to design course-tracking based on stable conditions [
31], but this still needs to be studied under unstable conditions. Due to the nonlinearity of the movements of vessels, building a model that fulfils the requirements of structural simplicity and functional generalization is challenging.
The neural network model is a black-box identification scheme. Moreira et al. [
32] proposed a modeling method based on a time-delayed recurrent neural network. In [
33,
34], an approach was used that combined neural networks with other functions. Although these studies only rely on data, network structures have no any explanation in terms of semantics. In practice, we have observed such a phenomenon. Crewmembers who do not know any mathematical models still master their steering skills through more training, which indicates that such models still have room for improvement.
An identification scheme is also applied when modeling motorboats. Wang et al. [
35] proposed the constrained multistep prediction (CMSP) method to identify a USV model with 32 parameters. However, the risk of the motorboat being driven by the PRBS excitation signal increases during the test. In [
36], a USV model with four thrusters was identified using the normal equation. Although there were fluctuations between the truth values and the predictions, their study showed the potential significance of the data-driven model based on sea trials. Xiong et al. [
37] realized the berthing task for a USV by using a real-time attitude meter and microwave radar sensors. However, there are few such sensors installed on-board. Furthermore, when the signal accuracies signals are low, ships may collide with the wharf due to the large inertia, which is consistent with the investigation in [
38].
Based on previous research, full-scale or towing tank model tests require a high level of investment. Due to the high risk of operation and the necessity of sampling readily disturbed variables simultaneously, professional technicians are indispensable. Furthermore, these methods neglect the seafarers’ prior knowledge. Therefore, this study focused on building an FCM modeling framework based on a combination of the generalization utilization of data in nautical practice and the dominant acquaintance of officers.
An FCM is an intelligent soft computing method that combines fuzzy and neural networks [
39,
40]. Gao et al. [
41] has theoretically proved the feasibility of modeling a steady turning motion. However, engineering applications have rarely been directly examined. First, the training data are derived from ship simulators without disturbances and any loss of sampling [
42]. Second, the effect of projection transformation on safety has not yet been explored. Because coordinate transformation can affect the accuracy of positions on charts, it is necessary to verify practicability. Third, the work conditions of the sensors on-board were not checked. Therefore, it is important to design a data-driven modeling scheme based on fuzzy cognitive maps using measurements in nautical practice.
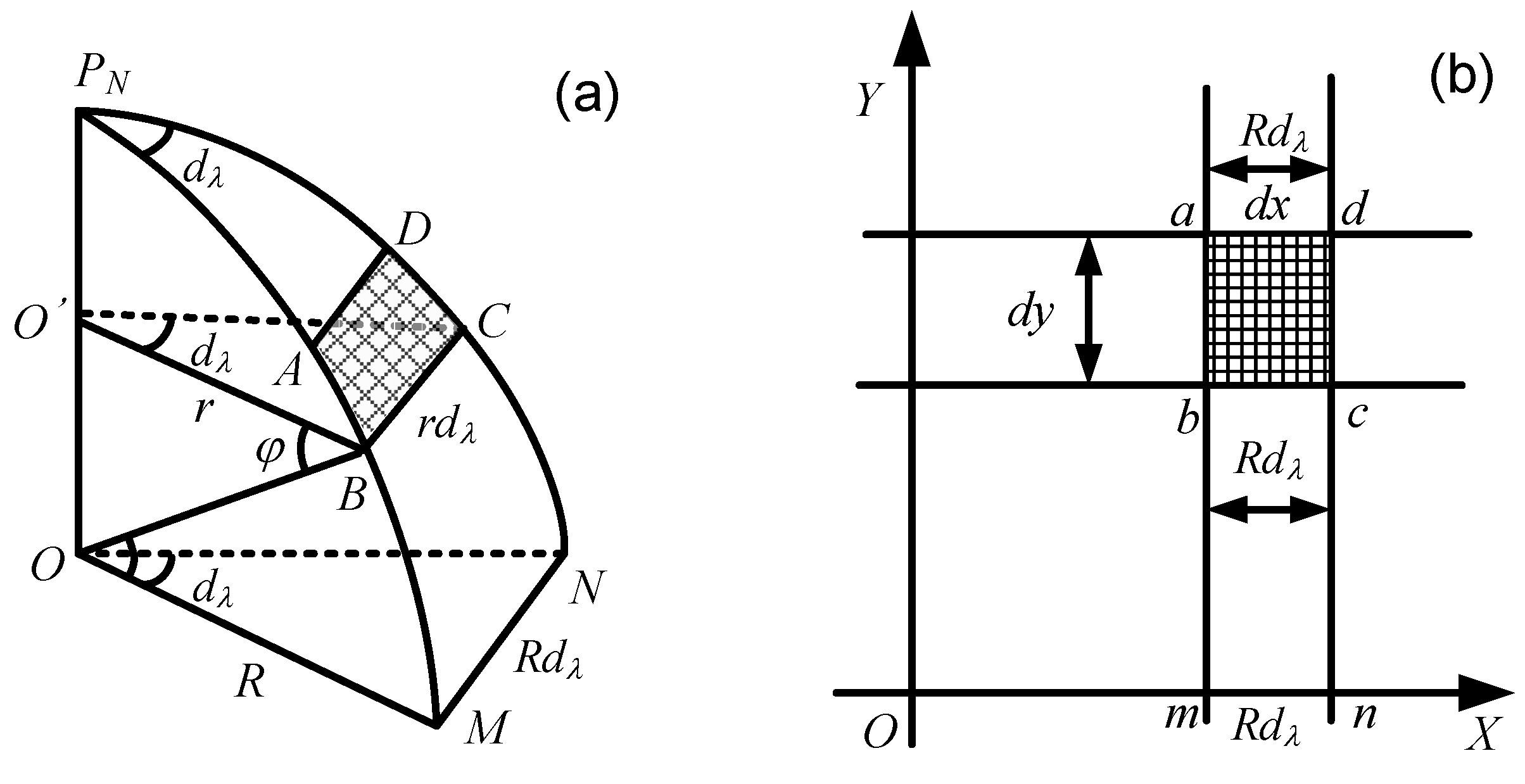
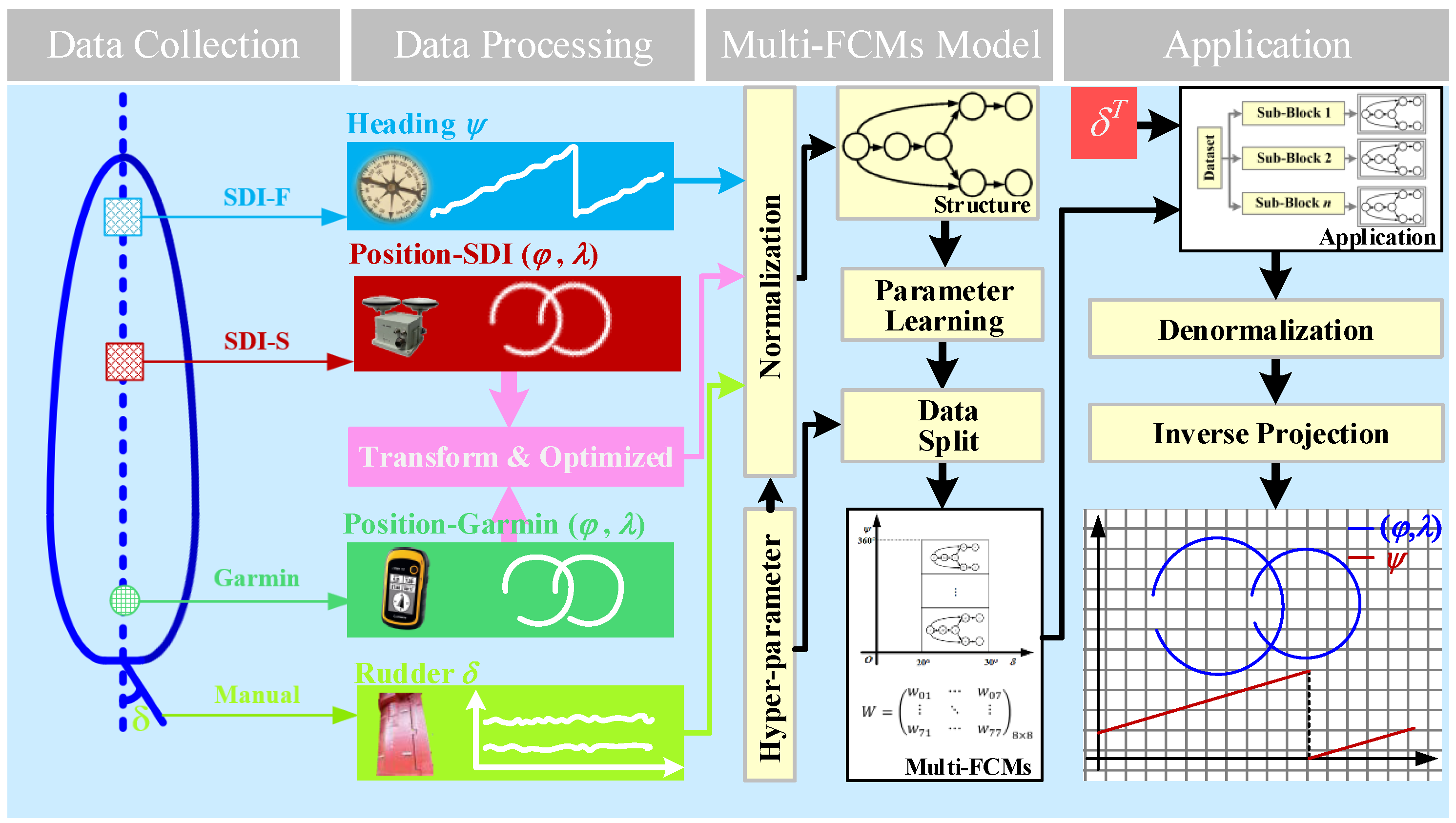
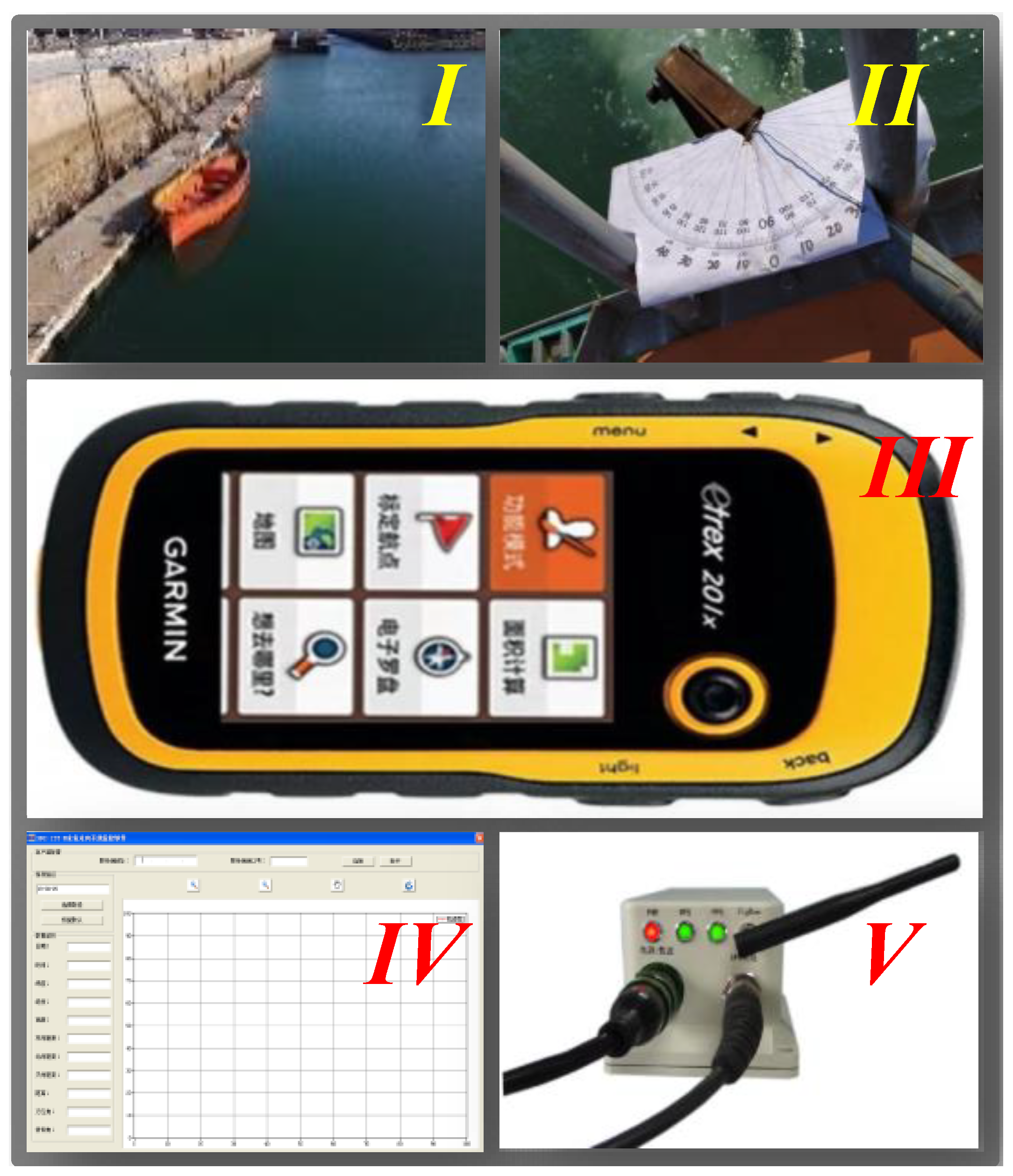
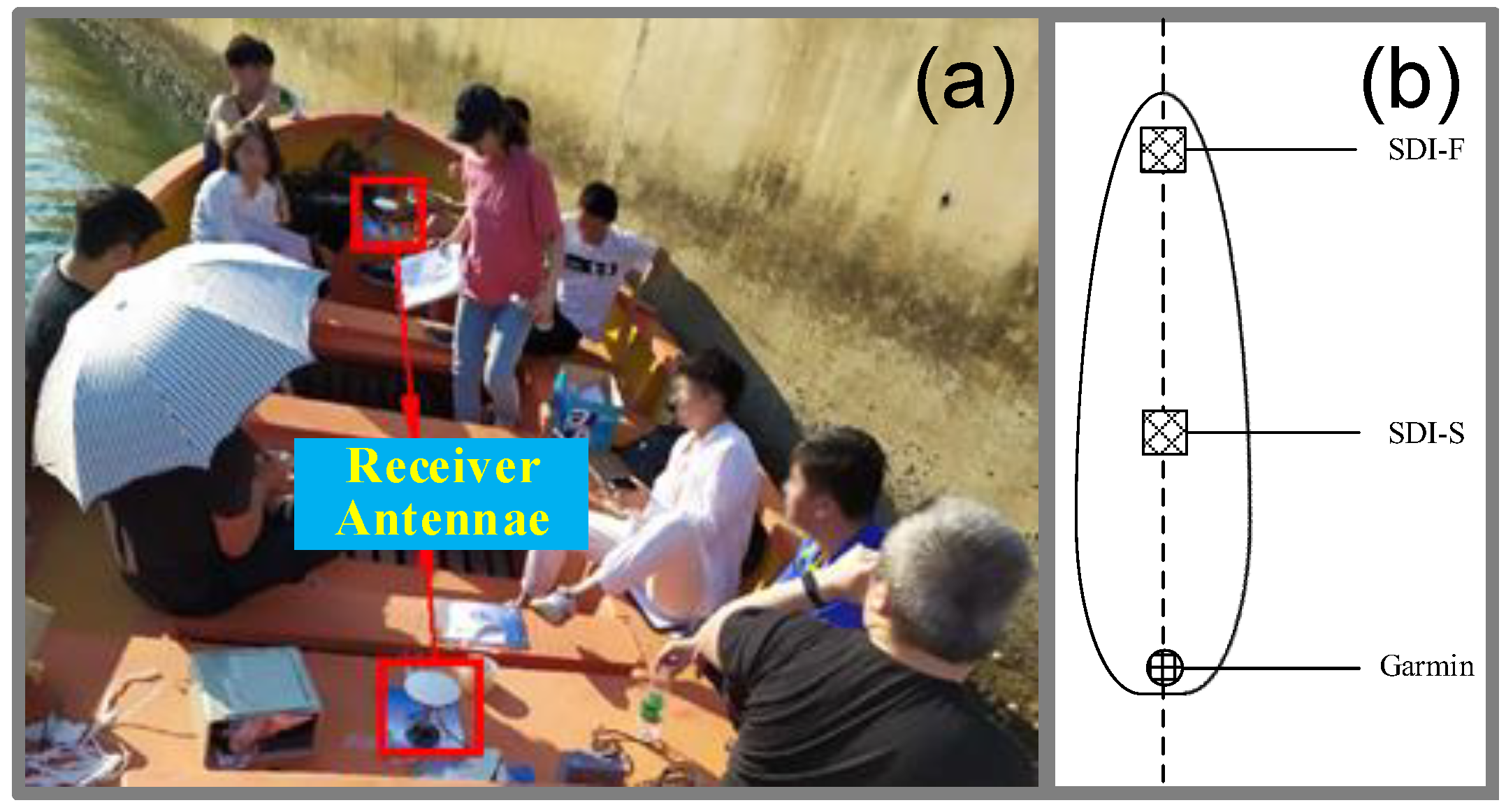
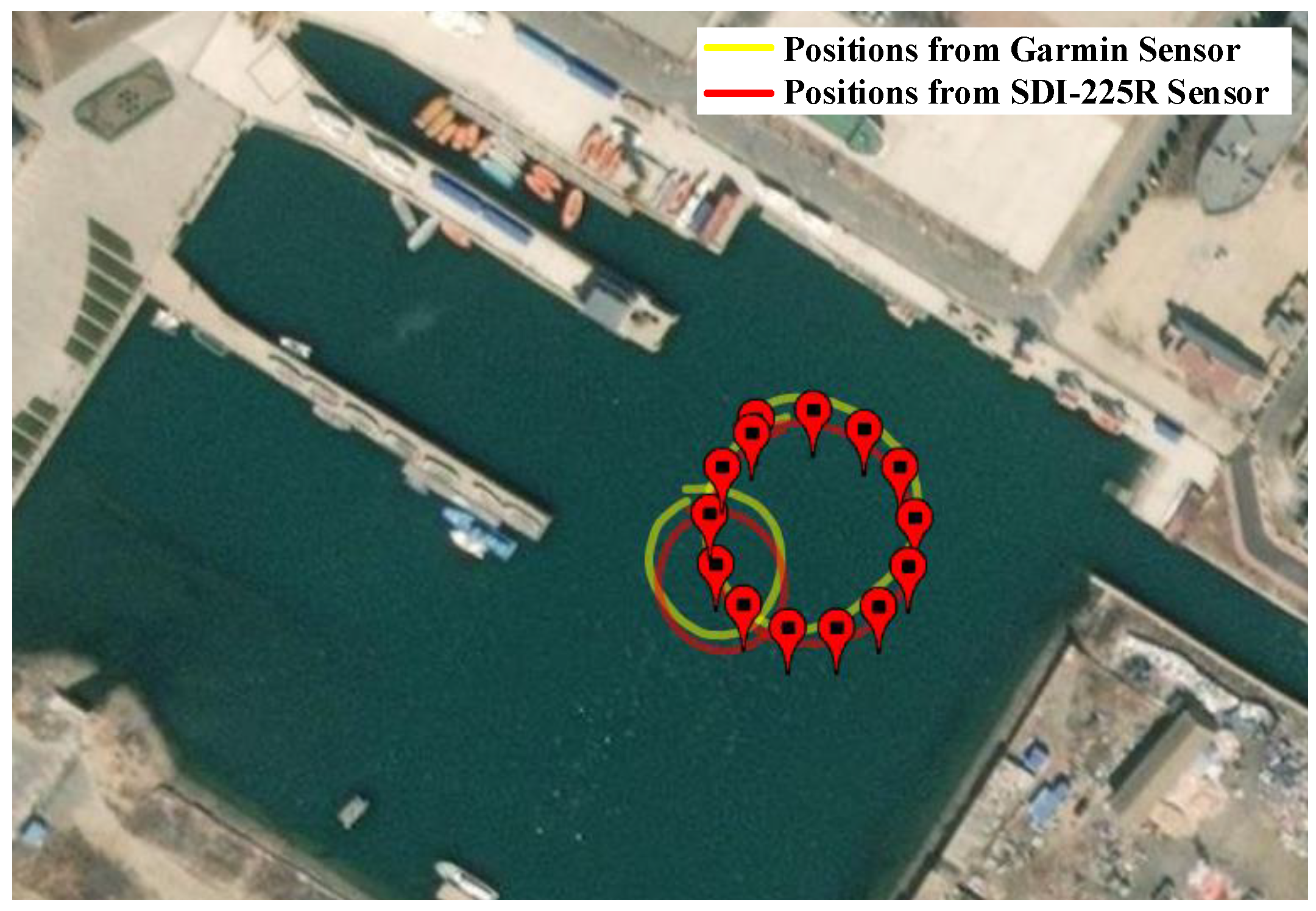
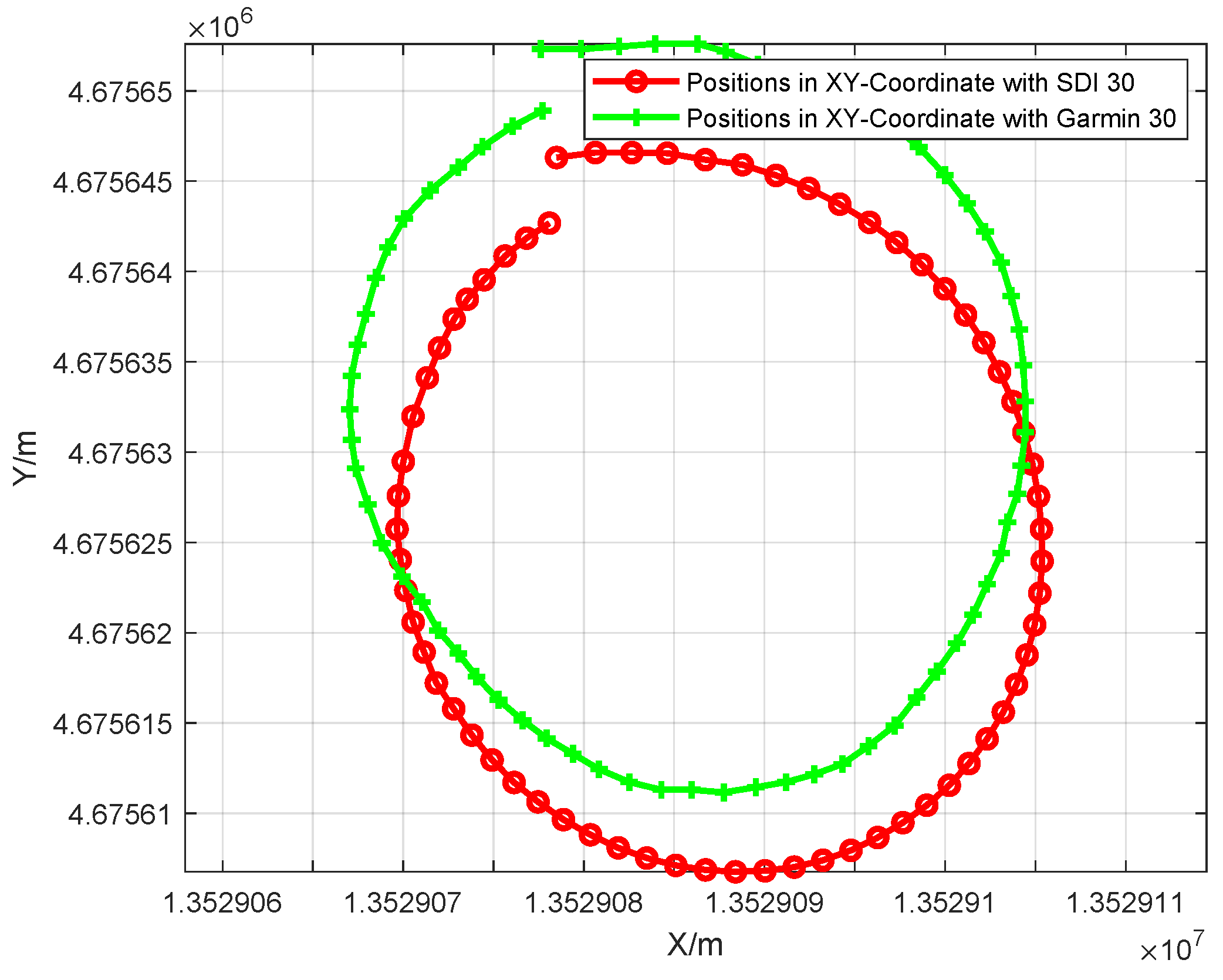
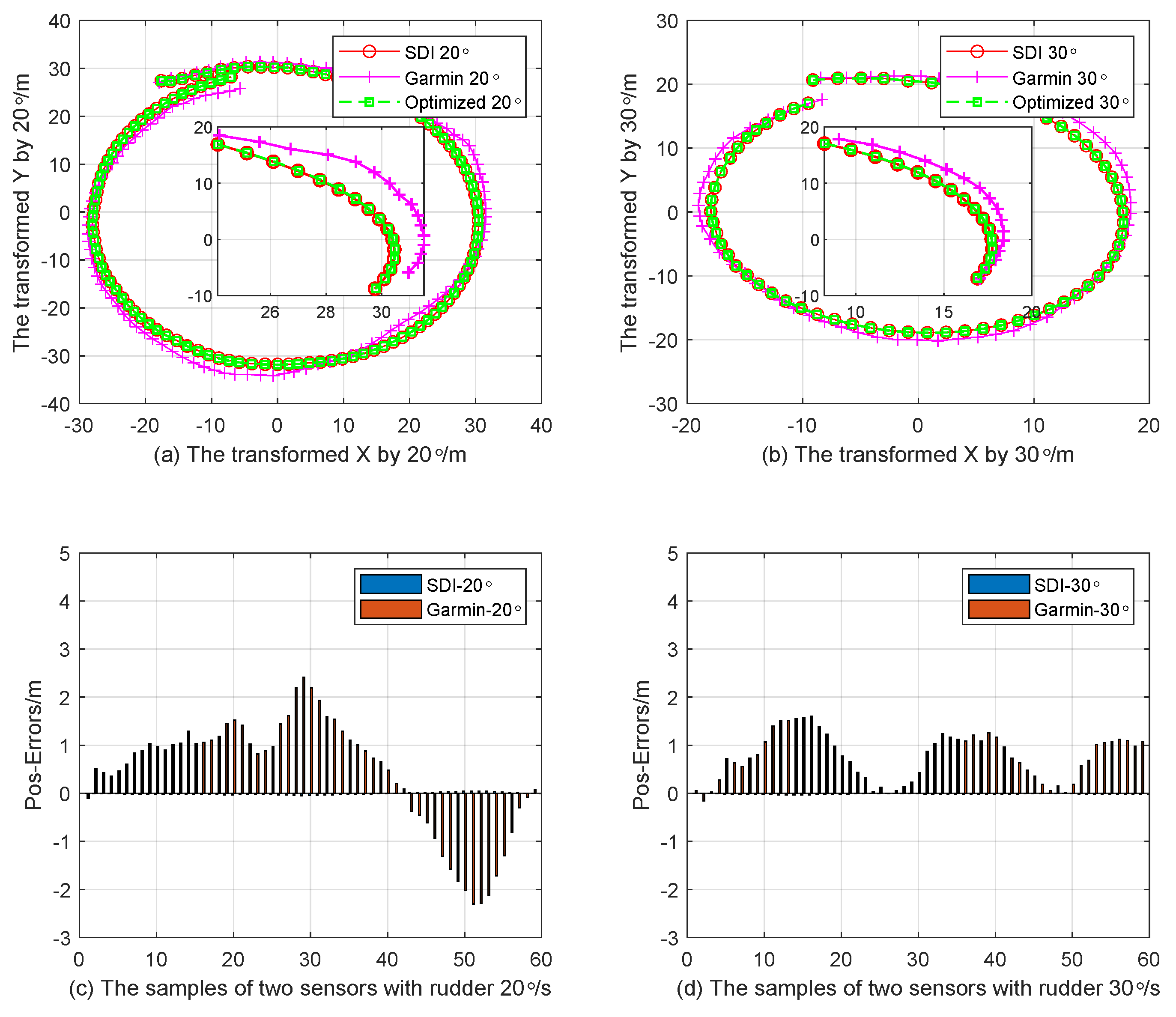
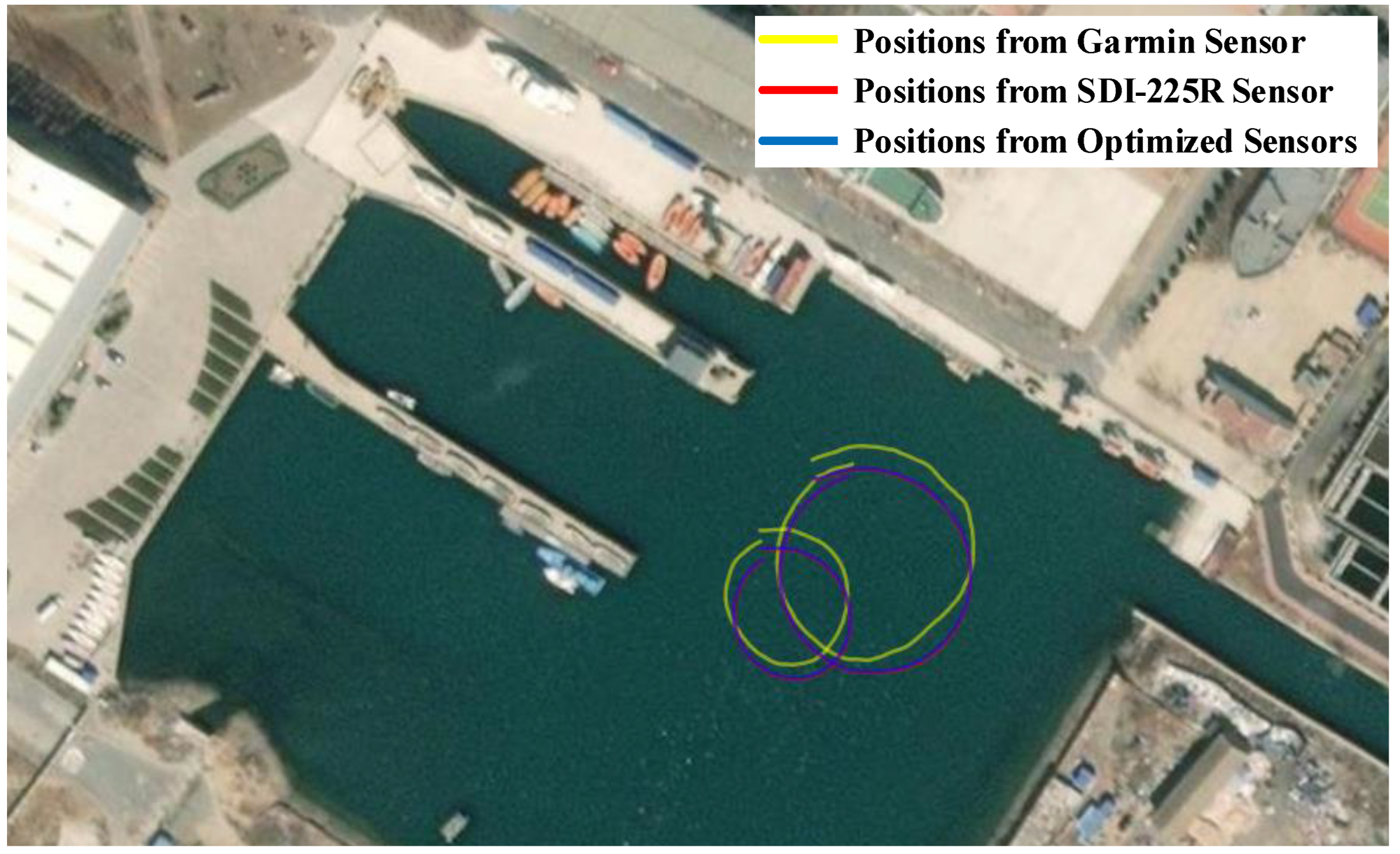
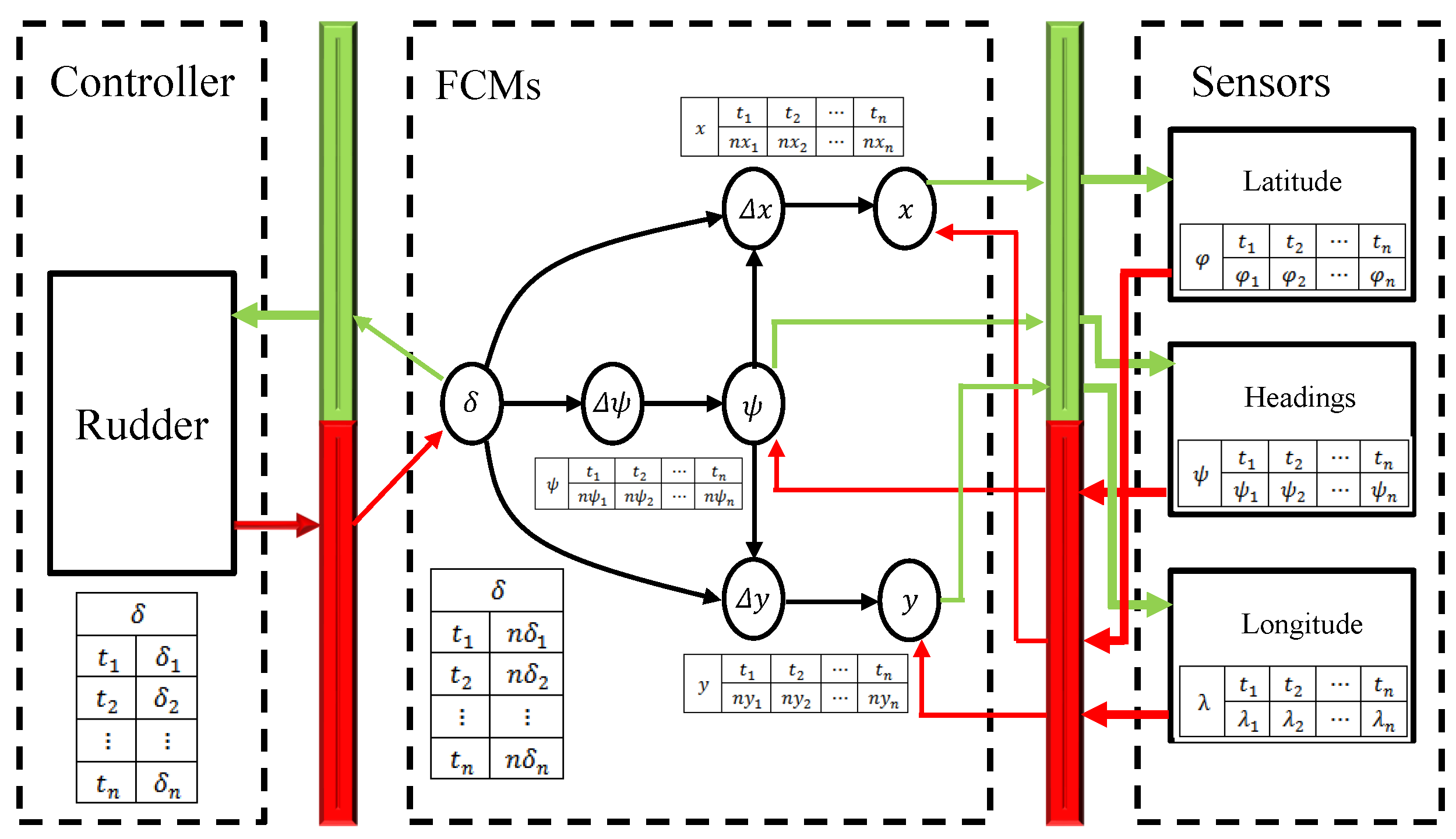
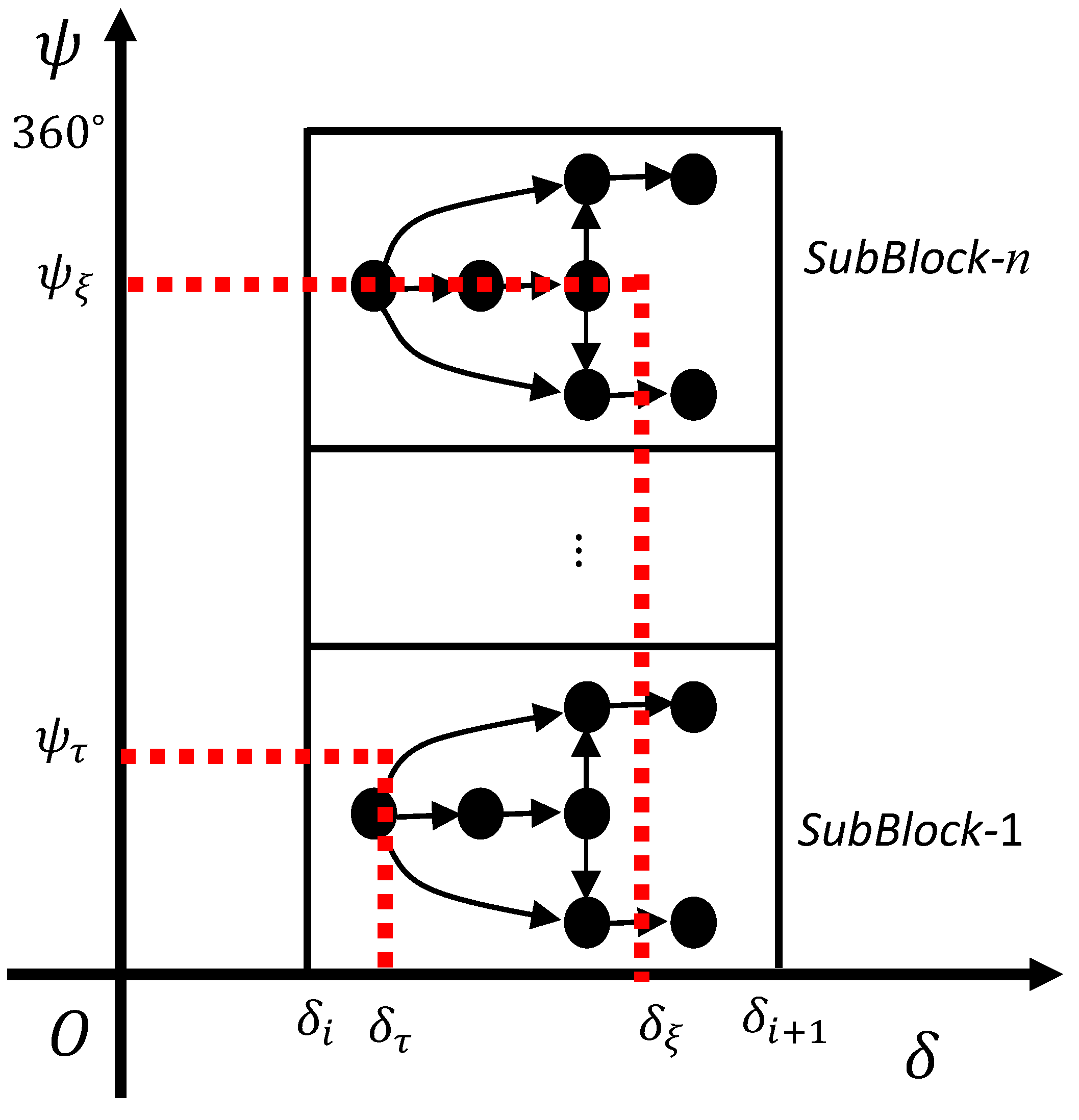
This study aimed to develop a practical framework to model a steady turning motion based on a data-driven multi-block FCMs model using motorboat sea trials. First, sea trials were organized to measure the states of motorboats using sensors. Subsequently, the positions sampled by the multi-source sensors were transformed to XY plane coordinates using Mercator projection, and the optimal positions were then estimated by inverse variance weighting. These sampled data were used to train the model of the multi-block FCMs according to the divide-and-conquer strategy. Finally, the experimental results indicate the effectiveness of the presented scheme. The contributions of the current work can be summarized as follows.
We organized sea trials to collect four states (, , , and ) of motorboats at sea and then combined the coordinate transformation with the inverse variance weighting method to achieve optimal sampling positions. These measurements were employed to train the multi-block FCMs model to model the steady turning motion of motorboats.
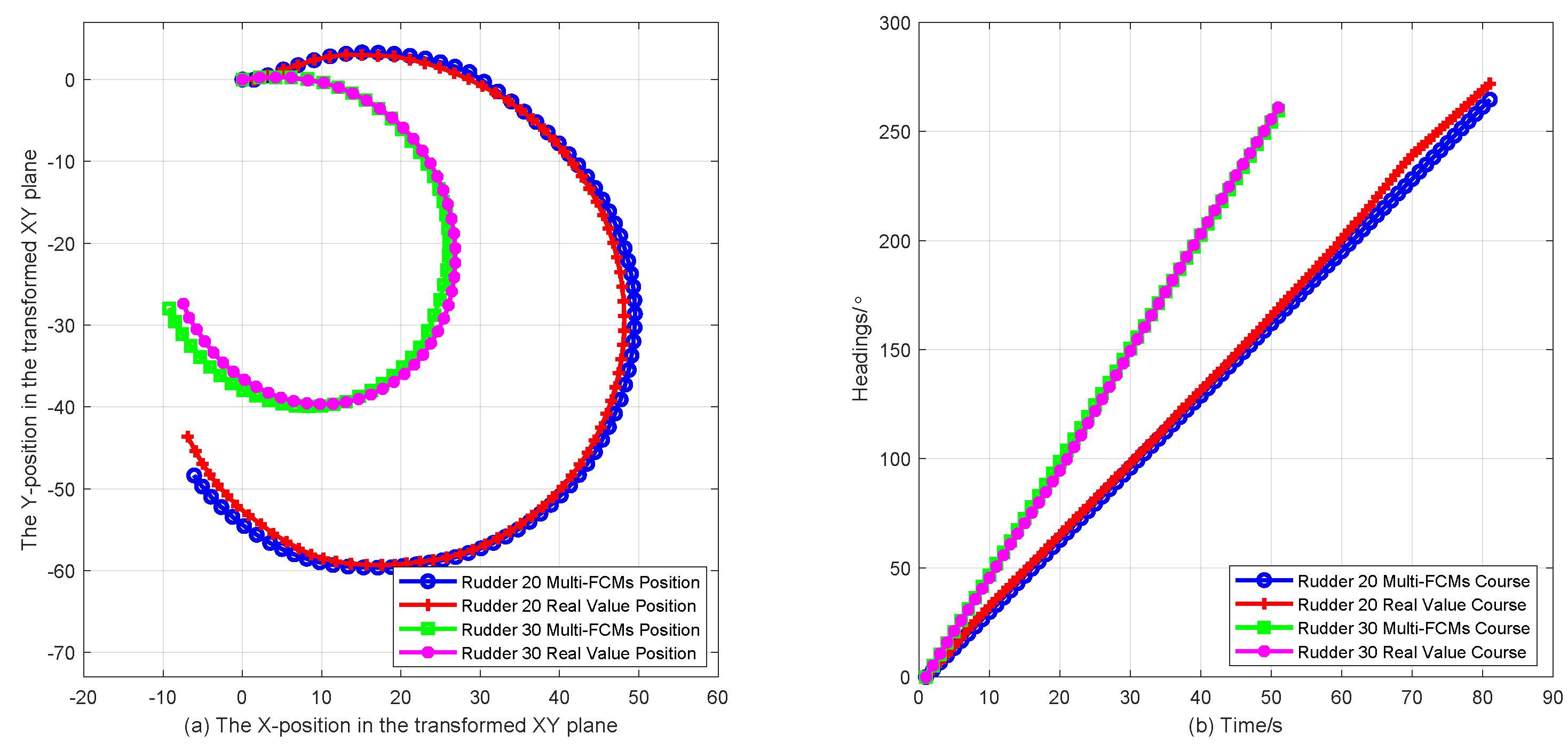
The simulation results show that the proposed model is effective and insensitive to speed, as opposed to the classical model. This scheme has potential application value in the field of marine science.
The rest of this paper is organized as follows. In
Section 2, we motivate our approach by presenting prior related research. After that, we propose an integrated scheme of data-driven multi-block FCMs to model the steady turning motion of motorboats based on sea trials. The experimental simulations are described in
Section 4, while discussions are provided in
Section 5. Finally, we provide the conclusions in
Section 6.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







