4.1. Heading Orientation Test Experiment
The heading planning control is a fundamental module in executing UUV autonomous navigation; it directly influences the effectiveness of the autonomous navigation control. As such, it is crucial to verify the control performance of the UUV’s heading control before conducting the autonomous heading planning test experiment.
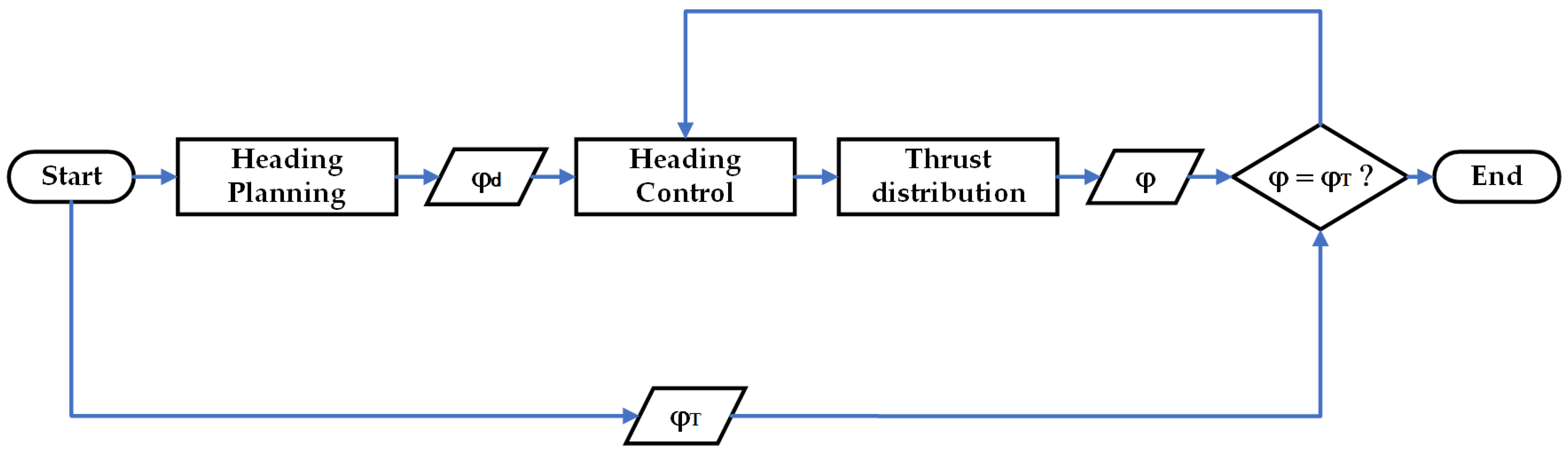
Figure 10 shows the procedure of the heading bow test experiment to obtain the control parameters
of the heading PID controller. The desired heading referenced in the figure is the direction of the geographical coordinates 180°.
At the beginning of the experiment, the controller is given an initial value of roughly, and the UUV is artificially deflected to a certain angle with the target heading. After starting the heading bow function, the UUV automatically deflects to the target heading. The heading angle in the above process is stored. The following steps are adjusted to the PID control parameters by observing the critical oscillation curve using the critical proportionality method:
First, use proportional control, starting from a larger proportionality , and gradually reduce the proportional degree so that the system response to the step input can reach the critical oscillation state. The proportionality at this point is denoted as , and the critical oscillation period is denoted as ;
Determine the PID controller parameters according to the empirical formula of the critical proportionality method provided by Ziegler-Nichols (see
Table 4); this method applies to the controlled object with self-balancing capability.
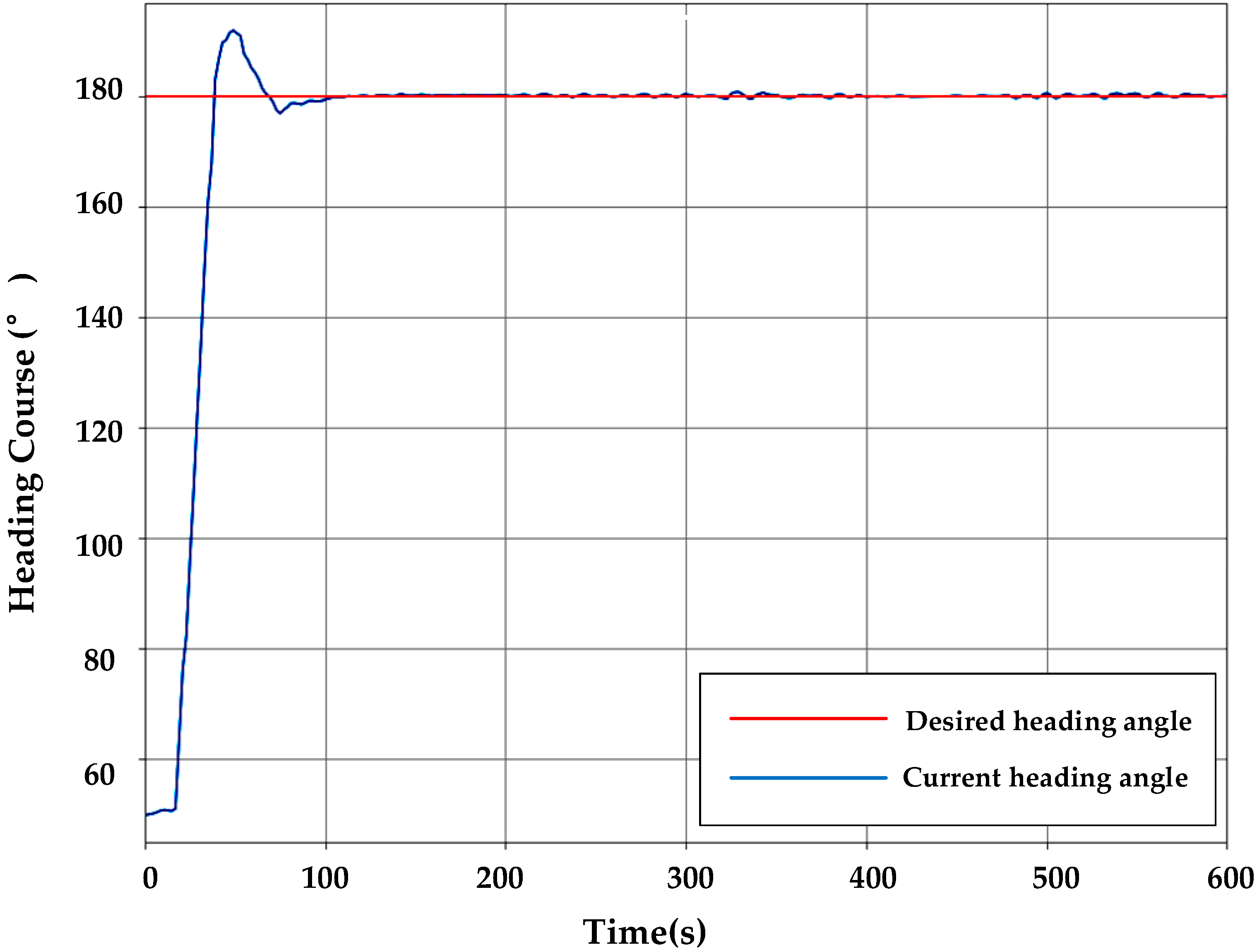
Figure 11 shows the heading angle change curve of the PID controller finally tuned through the critical proportionality method during the heading orientation experiment.
As shown in
Figure 11, the UUV quickly approaches near the target heading from the current heading angle, and promptly retraces to 180° in the opposite direction after the heading overshoot occurs, and finally remains stable at the heading angle of 180° to realize the UUV’s heading orientation control. In this paper, the initial value of
is set to 1. The following
Table 5 shows the final obtained PID control parameters.
4.2. Autonomous Heading Planning Simulation and Verification
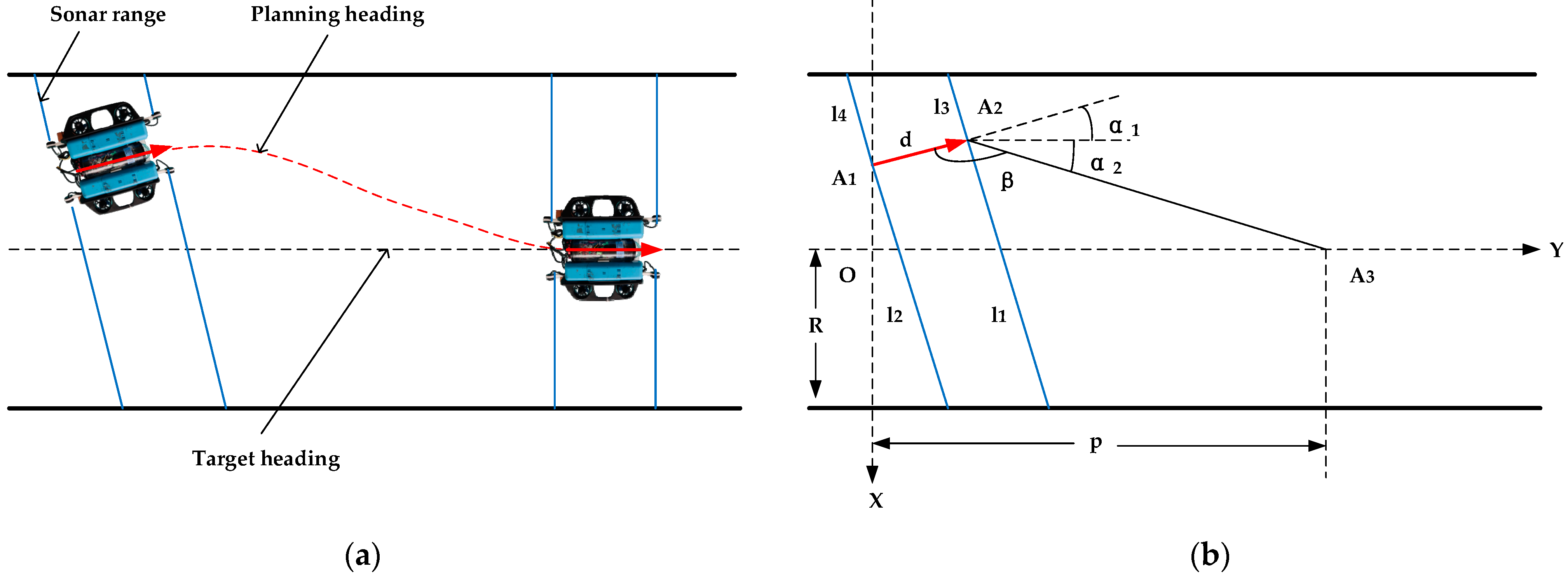
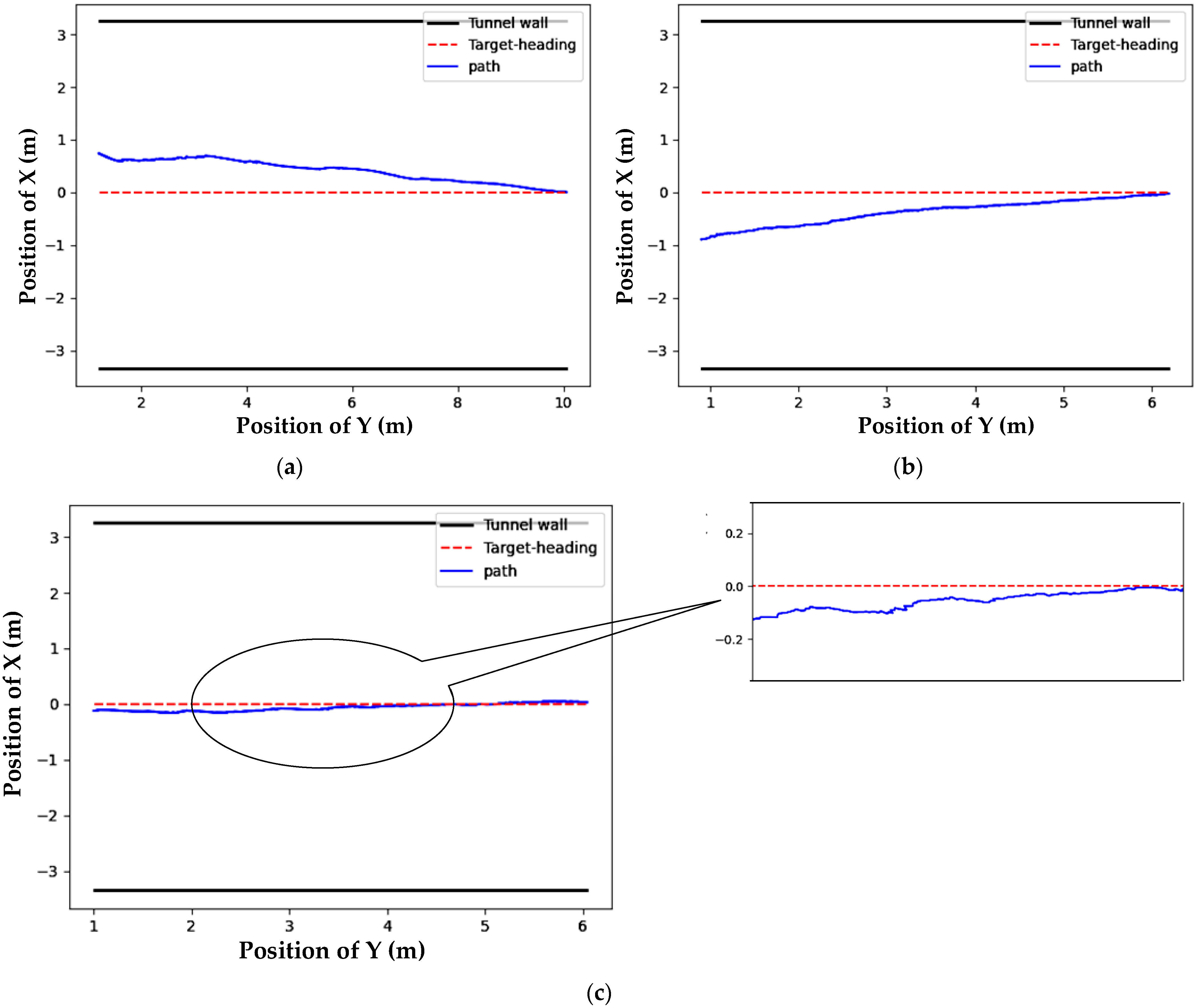
We preliminarily verify the effectiveness of the proposed autonomous heading planning method by conducting simulation experiments in a simulation environment built with specific parameters. The parameters set for the simulation environment are: tunnel radius and planning distance ; and the target heading is set to the forward direction of the environment’s central axis. The simulation experiment uses the simulated sonar acquisition data as the feedback input. Given a fixed speed for the UUV to move in the Y direction, the sampling time . Changing the starting position of UUV in the simulation environment to simulate several situations that may occur when a robot navigates in a tunnel has been carried out. The following three sets of simulation experiments have been conducted, and the corresponding situations are as follows:
Case I: The starting position of UUV is located at about 1 m to the left of the tunnel central axis, and the heading is left relative to the target heading;
Case II: The starting position of UUV is located about 1 m to the right of the tunnel central axis, and the heading is right relative to the target heading;
Case III: The starting position of UUV is near the central axis of the tunnel.
By recording the coordinate position changes of UUV in the simulation environment through autonomous heading planning during the simulation process, three sets of UUV path change curves for simulation experiments are drawn, as shown in
Figure 12 below:
From the above Figure, it can be seen that in the simulation environment, UUVs start from different starting positions. When the path where the target heading is located is far away, they can autonomously plan the heading to make the UUVs approach the central axis where the target heading is located and reach the target heading; when the UUV starts from or arrives near the path where the target heading is situated, the UUV can stabilize the heading within the error range of ±0.1 m for the target heading. It can be seen that the effectiveness of the proposed autonomous heading planning and control method for autonomous navigation control of UUV in a tunnel environment has been preliminarily verified.
4.3. Autonomous Heading Planning Experiment and Analysis
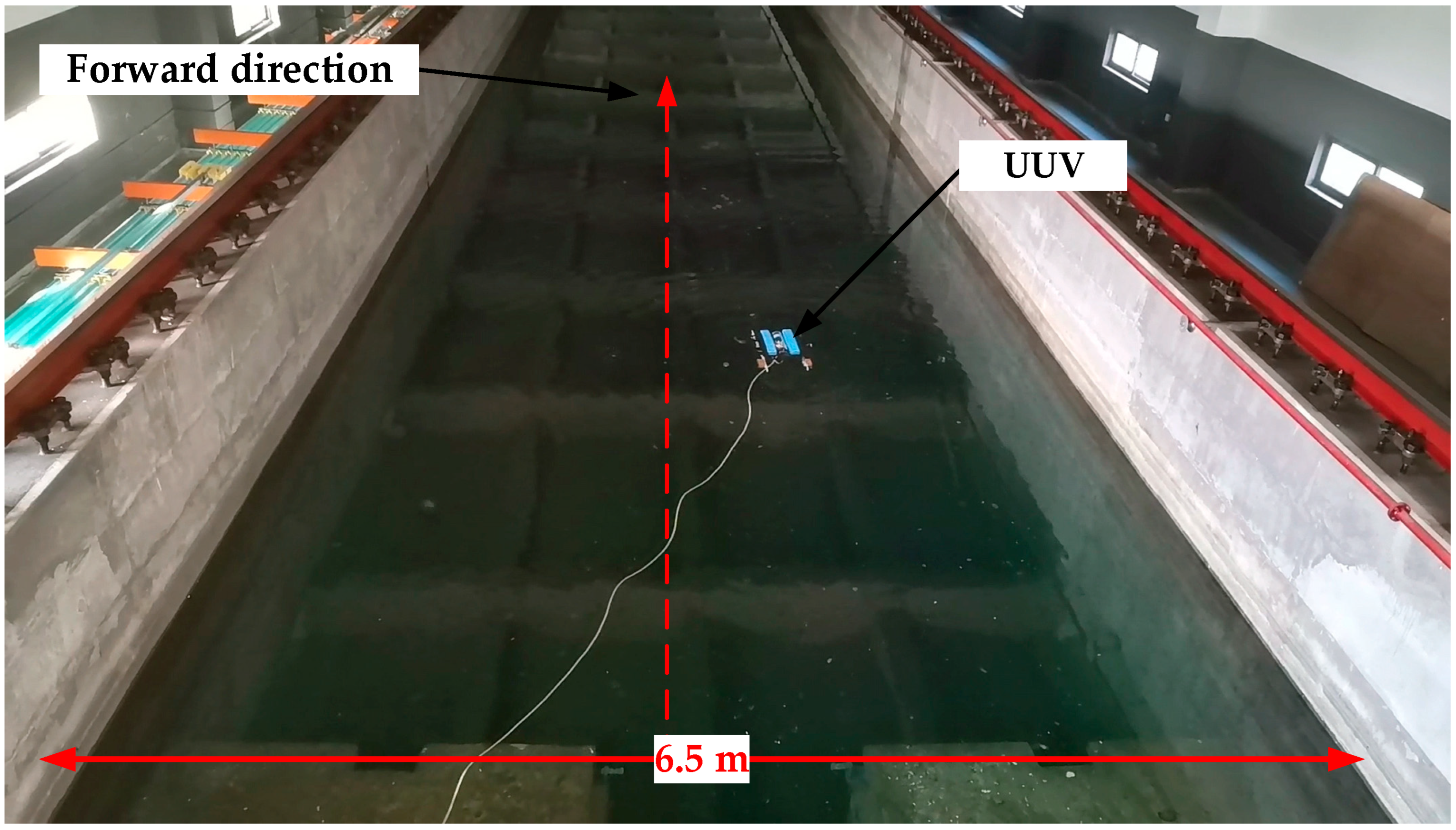
To better observe the effect of heading planning and control, we conducted test experiments in an indoor pool with a width of 6.5 m and a length of 160 m. The test environment was designed to simulate the navigation process of the UUV in a tunnel for tunnel detection, as shown in
Figure 13.
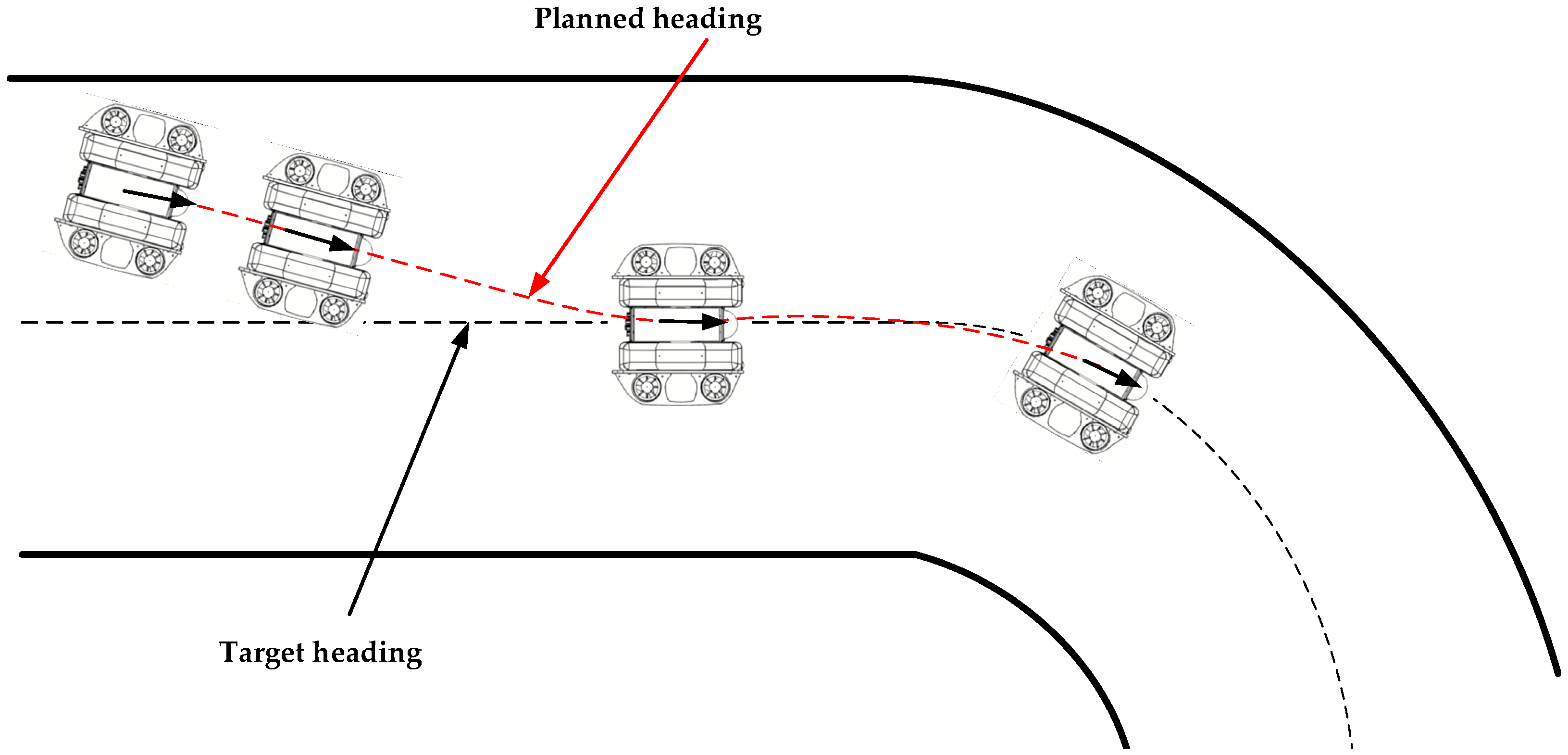
The UUV is initially placed at a position off the central axis, and its movement is controlled towards the forward direction from the starting point on the shore in the test environment shown in
Figure 10. The scheme for autonomous heading planning is as follows: the UUV takes the forward direction of the central axis of the pool as the target heading. To observe the effect of heading planning, the UUV is manually placed at a position that deviates from the central axis. After starting the heading planning node, the heading change process of the UUV is carefully observed to determine whether it conforms to the expected effect.
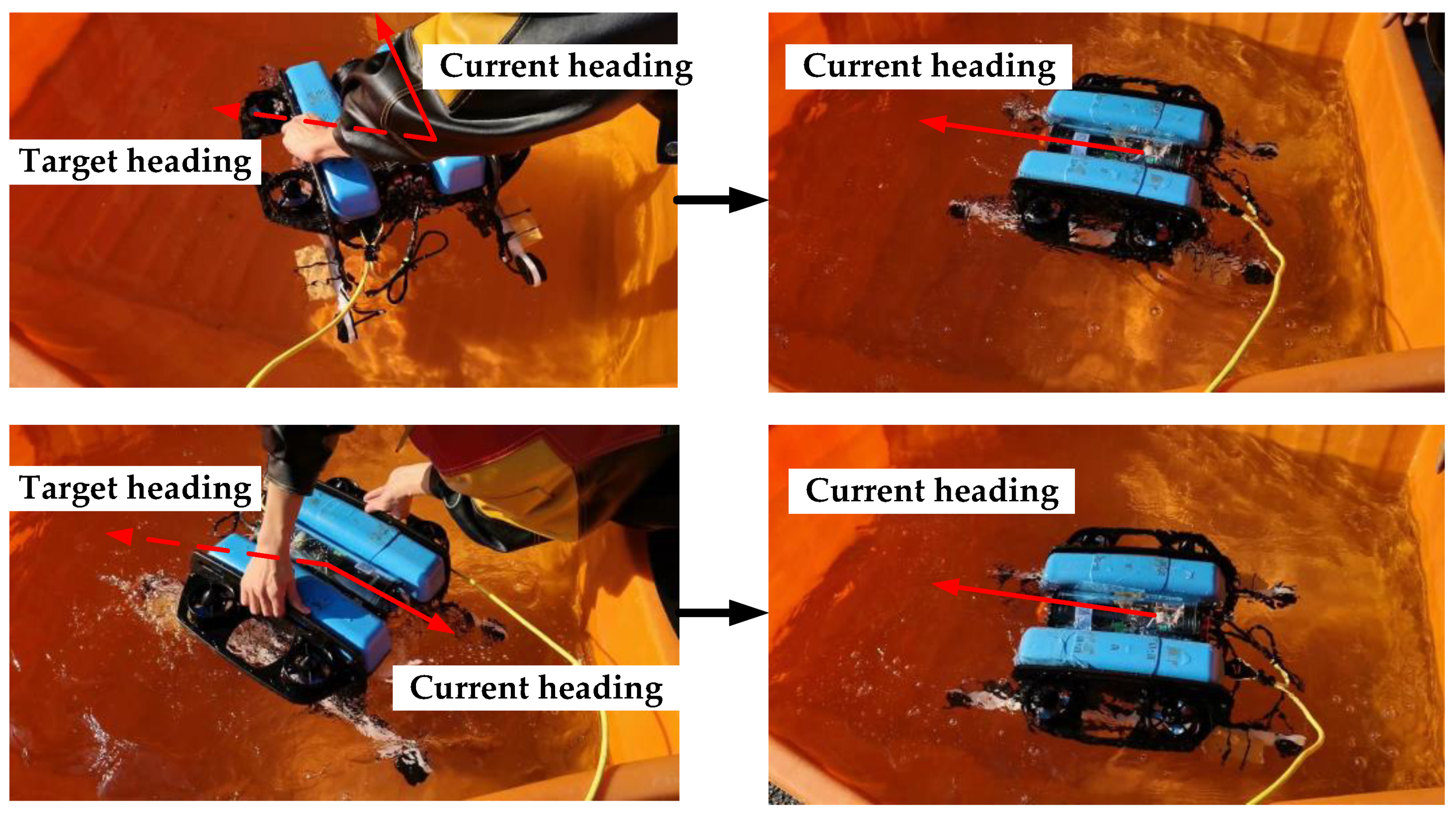
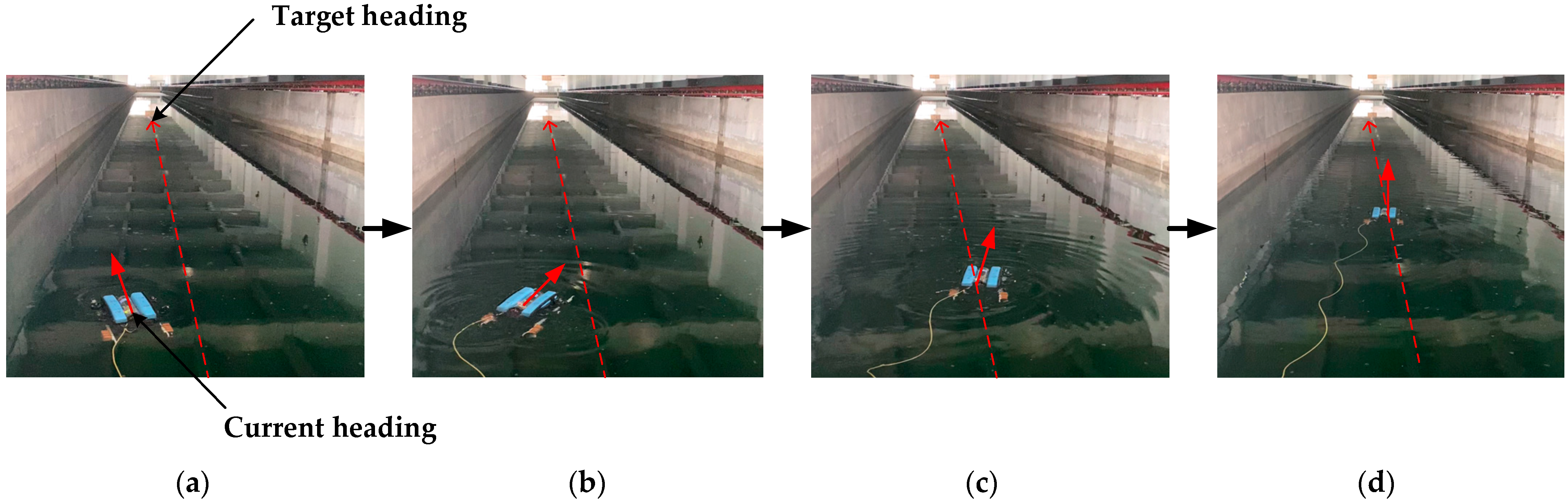
Figure 14 illustrates the heading change process in the test experiment.
The UUV in
Figure 14a starts on the left side of the central axis of the pool, with its bow pointing to the left. After starting the heading planning node, the bow of the UUV in
Figure 14b begins to deflect to the right, moving towards the central axis of the pool. As the UUV moves forward, the deviation angle between its current heading and the target heading in
Figure 14c gradually decreases. Eventually, in
Figure 14d, the UUV becomes stable near the central axis and advances steadily towards the target heading. It can be observed that the heading change process of the UUV satisfies the expected effect.
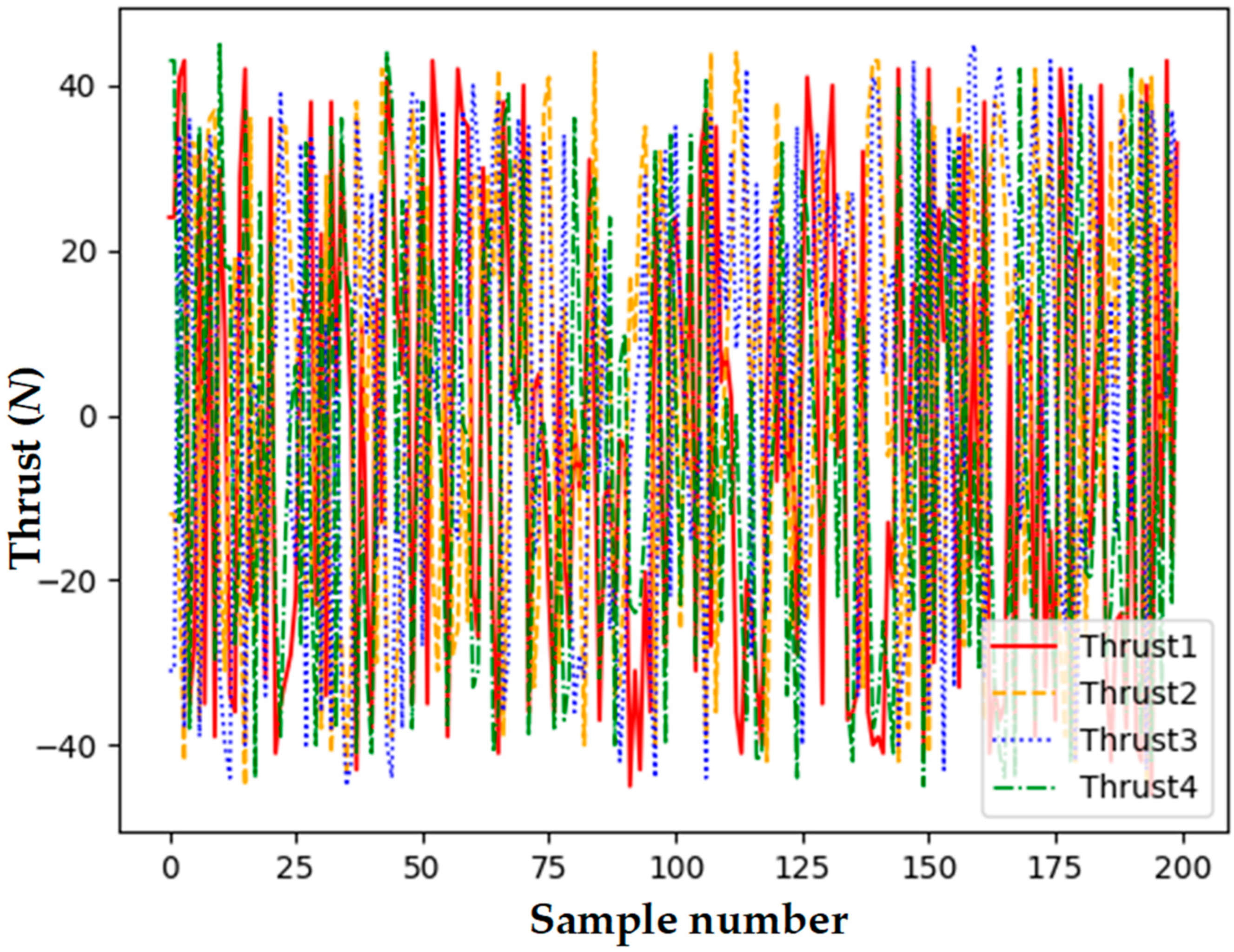
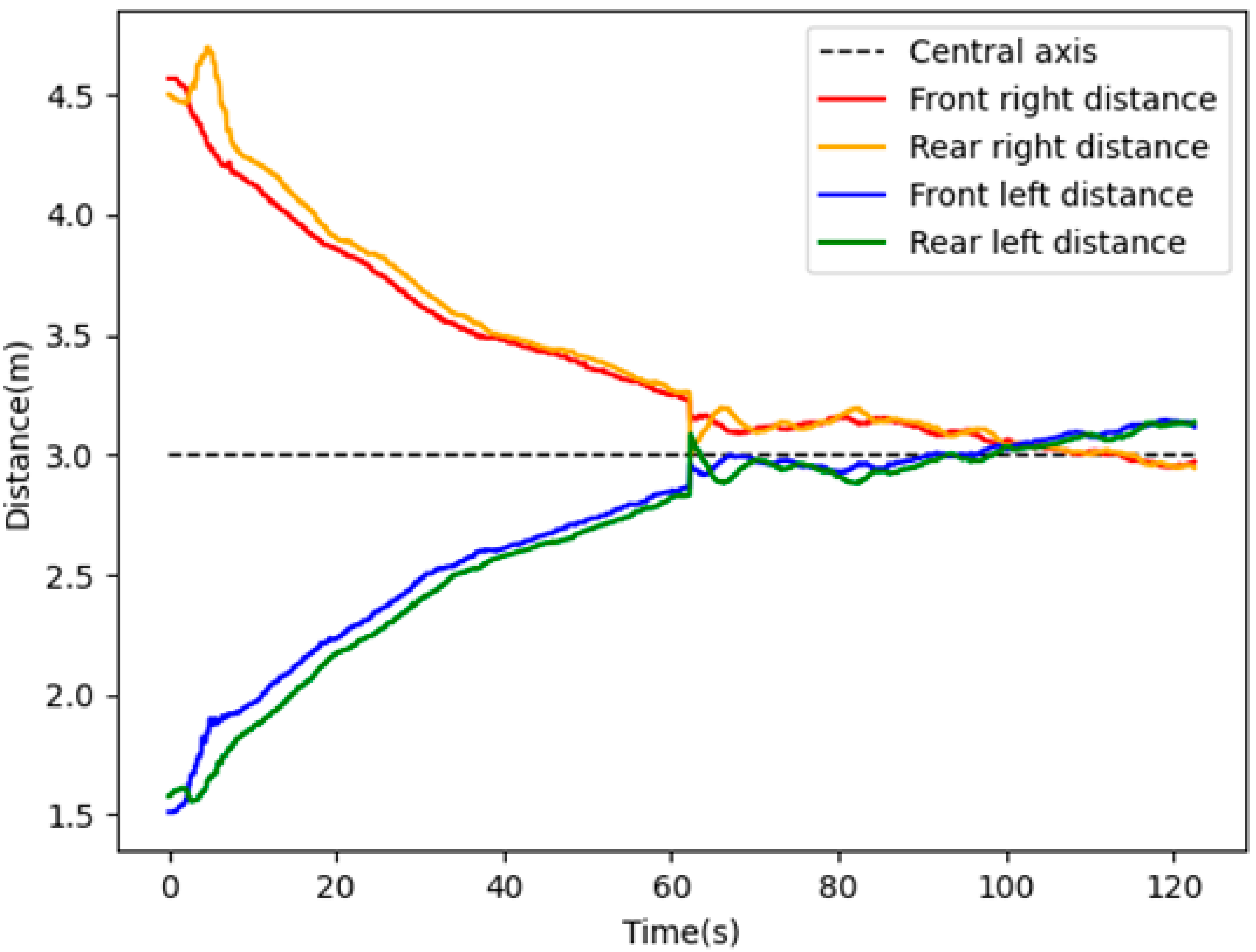
Based on the experiments conducted, it was determined that the UUV’s target navigation path is along the central axis of the pool. Regardless of the UUV’s starting position, the heading planning should guide the UUV towards the central axis. The ranging sonar is a critical sensor in the heading planning process, and its feedback can be used to analyze the control effect of heading planning. As the pool’s width is 6.5 m, excluding the UUV’s width, when the UUV reaches the target heading, the distance between the front and rear four sonar probes reaching the pool walls should be around 3 m. In a test conducted, we recorded the distance values from the four sonar probes to the pool walls as the UUV traveled forward, and their change process is shown in the figure below.
As depicted in
Figure 15, the initial distances between the probes on the left and right sides of the UUV and the left and right walls of the pool are about 1.5 m and 4.5 m, respectively. As the UUV progresses forward, the distance between the probe on the right side and the right wall of the pool gradually decreases and eventually stabilizes at around 3 m. Conversely, the distance value of the probe on the left side gradually increases and finally stabilizes at approximately 3 m. This observation shows that the UUV, starting from a position on the left side of the central axis, deflected to the right until it finally stabilized on the target heading. Hence, the autonomous heading planning and control of the UUV produced satisfactory results.
To further verify the effectiveness and stability of the proposed heading planning and control method, we conducted multiple sets of experiments to make the UUV start from different starting positions in the tunnel with different initial heading directions and recorded the change process of the current heading angle of the UUV during the experiment.
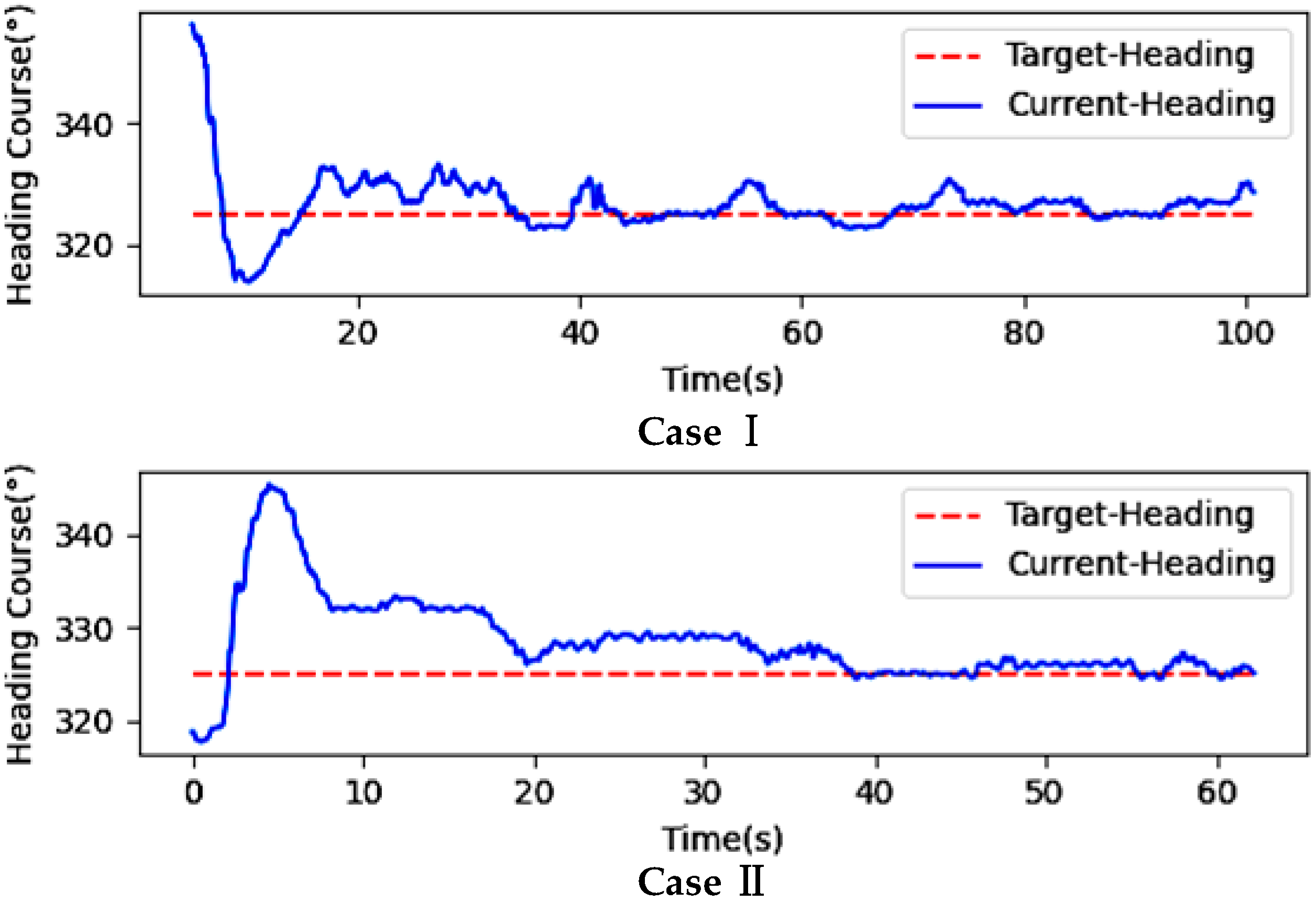
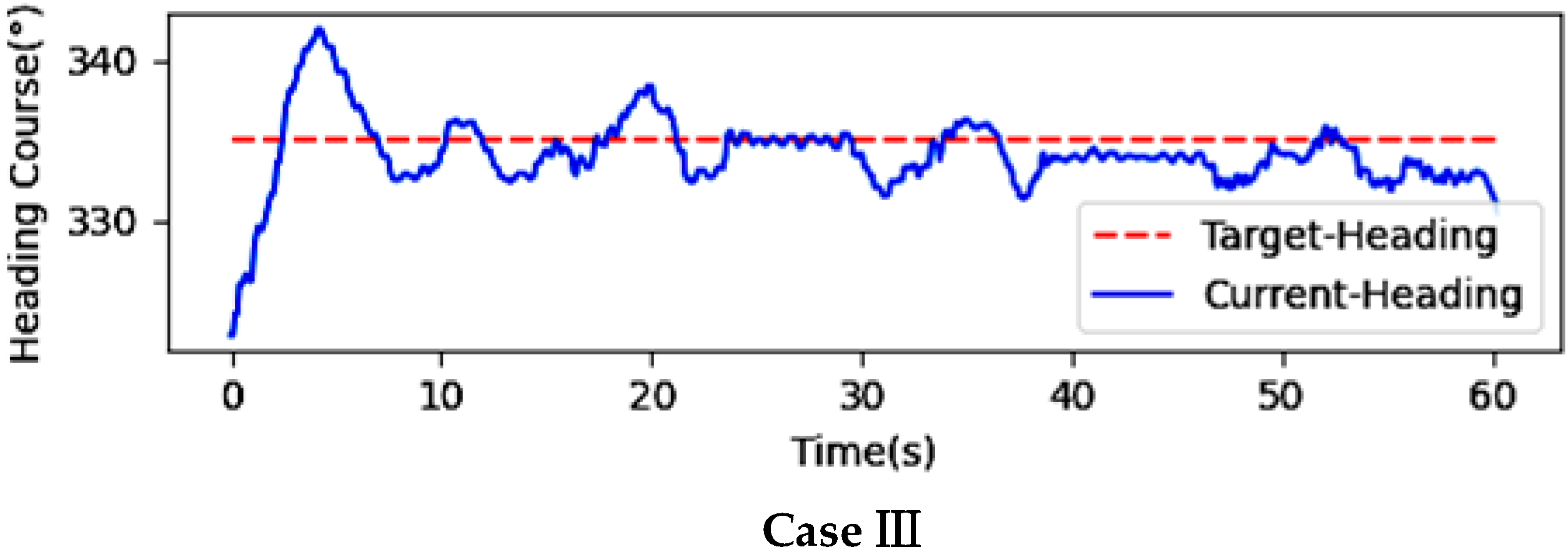
Figure 16 shows the heading change curves for three of the experiments. The following figure shows the heading change curves in three sets of experiments, which correspond to the three cases in the above simulation experiments.
As can be seen from
Figure 16, in Case I, the initial heading angle of UUV is about 350°, reaching the vicinity of the target heading at about 15 s and maintaining dynamic balance. In Case II, the UUV ultimately remains stable near the target heading of 325° as it navigates from a position where its prime angle is approximately 310°—and furthermore, it can be seen starting from different starting positions. Through autonomous heading planning, UUVs can approach the target heading faster and stabilize within a specific error range at the target heading angle. In Case III, the target heading is 335°, and the initial heading angle of the UUV is about 325°. Starting from a position close to the central axis of the tunnel, at an included angle with the target heading, it can be seen from the Case III that the UUV will dynamically adjust the current heading even after reaching the target path. It can be seen that when the heading is disturbed by water flow and affected by fluctuations, it can quickly adjust to the target heading again to achieve dynamic balance.
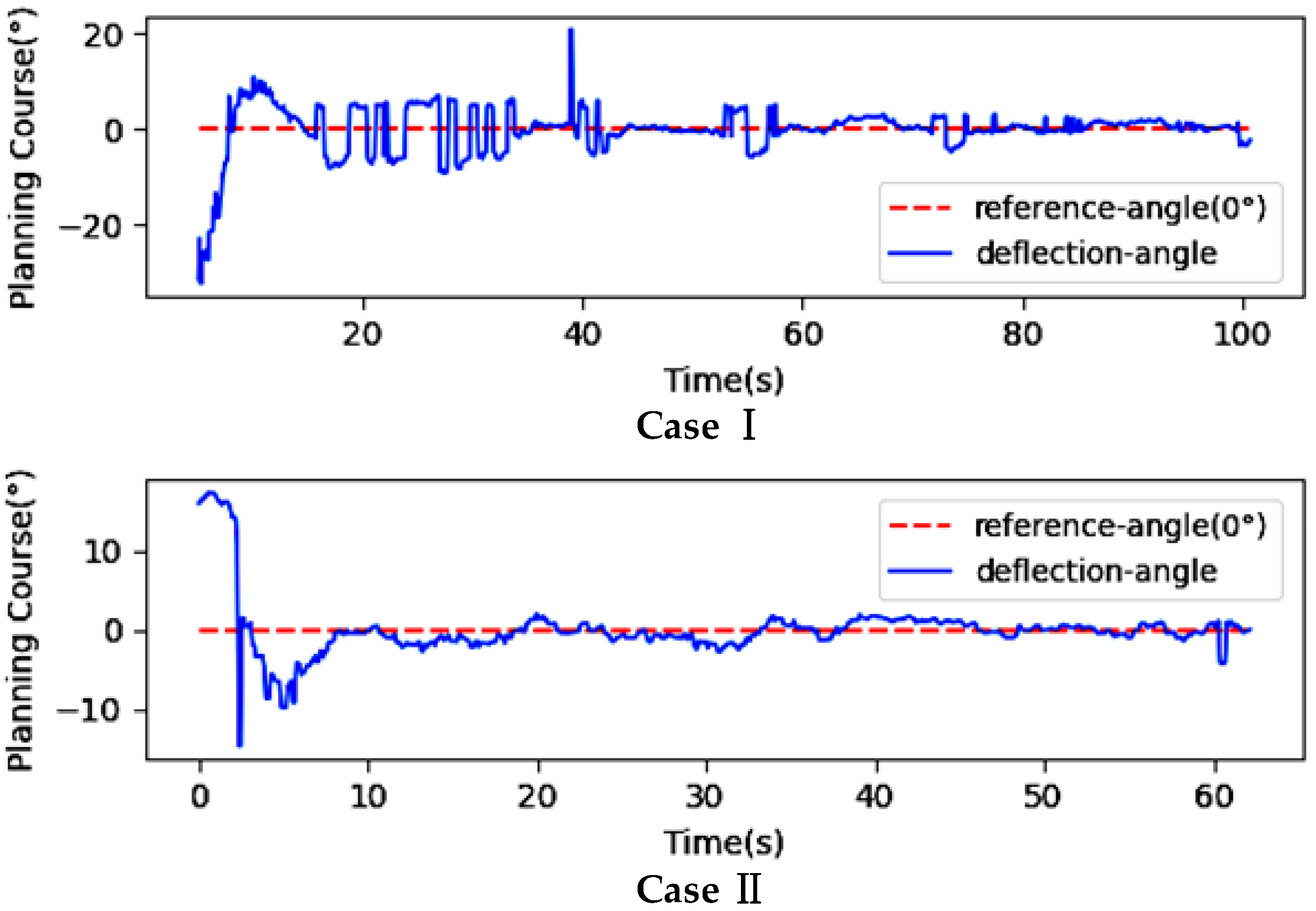
Figure 17 shows the variation of the desired deflection angle
at each sampling time during the heading planning process in the three groups of experiments mentioned earlier.
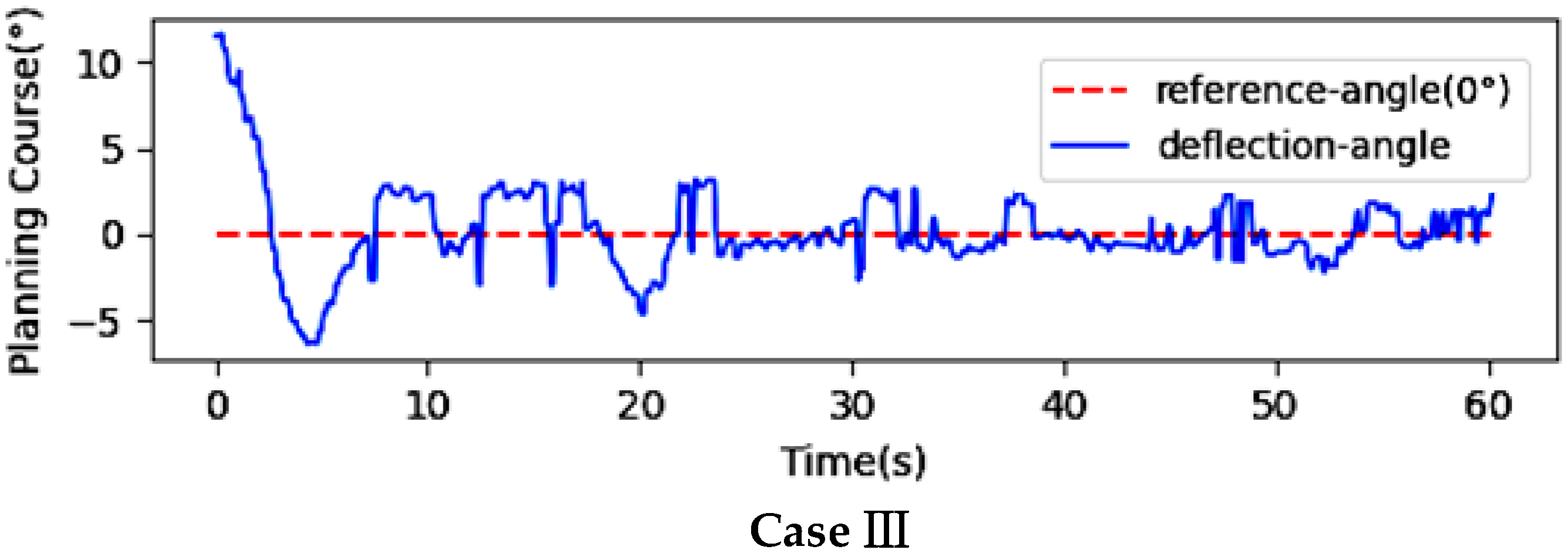
Theoretically, when the UUV reaches the target heading, the heading should be kept as constant as possible, and the desired deflection angle should be equal to or tend to 0°. As can be seen from the
Figure 17, in the three cases, the desired deflection angles for the start of UUV are 25°, 15°, and 10°, respectively, which is the deviation angle between the start heading of UUV and the target heading. Subsequently, the desired deflection angles are gradually reduced to 0° after the first arrival at the target heading. It can be seen that starting from different positions,
of UUV changes from large to small, approaching the target path with a large deflection angle and approaching 0° after reaching the vicinity of the target path. Finally, it adjusts up and down in a small range, consistent with our planning effect.
After observing the experimental data, it can be seen that the UUV heading is stable near the target heading after the experiment lasts for about 20 s. To further analyze the control performance of the heading planning method near the target heading, the deviation between the current heading of the UUV and the target heading during the experiment is analyzed numerically; the results are shown in
Table 6.
The table above shows the maximum absolute deviation of UUV from the target heading in each experiment, which were 5.925°, 4.428°, and 4.583°, respectively. The average deviation of the heading deviation angle during the navigation process was calculated and found to be stable within ±2° of the target heading. Using the target heading as the allowable error, the reference standard deviation of the heading deviation was set to 3. The standard deviations of the heading deviation angles in the 3 experiments were calculated to be 1.829°, 1.512°, and 1.249°, which were all much less than the reference standard deviation. This indicates that the dispersion of the UUV’s heading deviation after approaching the target heading is small, and can be well-stabilized in a slight deviation range. Therefore, it can be concluded that the autonomous heading planning control method proposed in this paper has good control performance, and strong applicability for the heading control process.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}