


Detecting Physical Impacts to the Corners of Shipping Containers during Handling Operations Performed by Quay Cranes


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
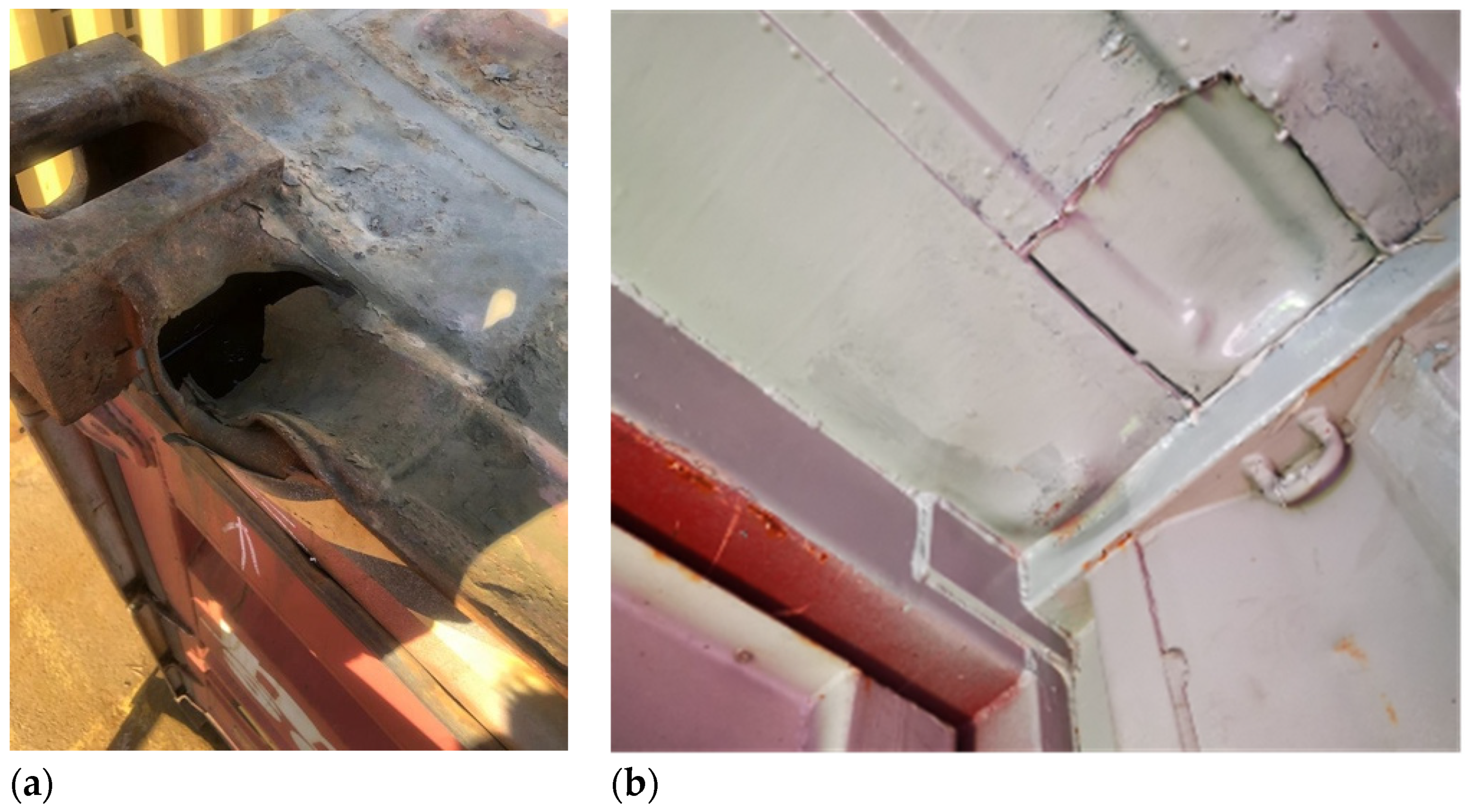
1.1. Problem Statement
1.2. Analysis of Advancements
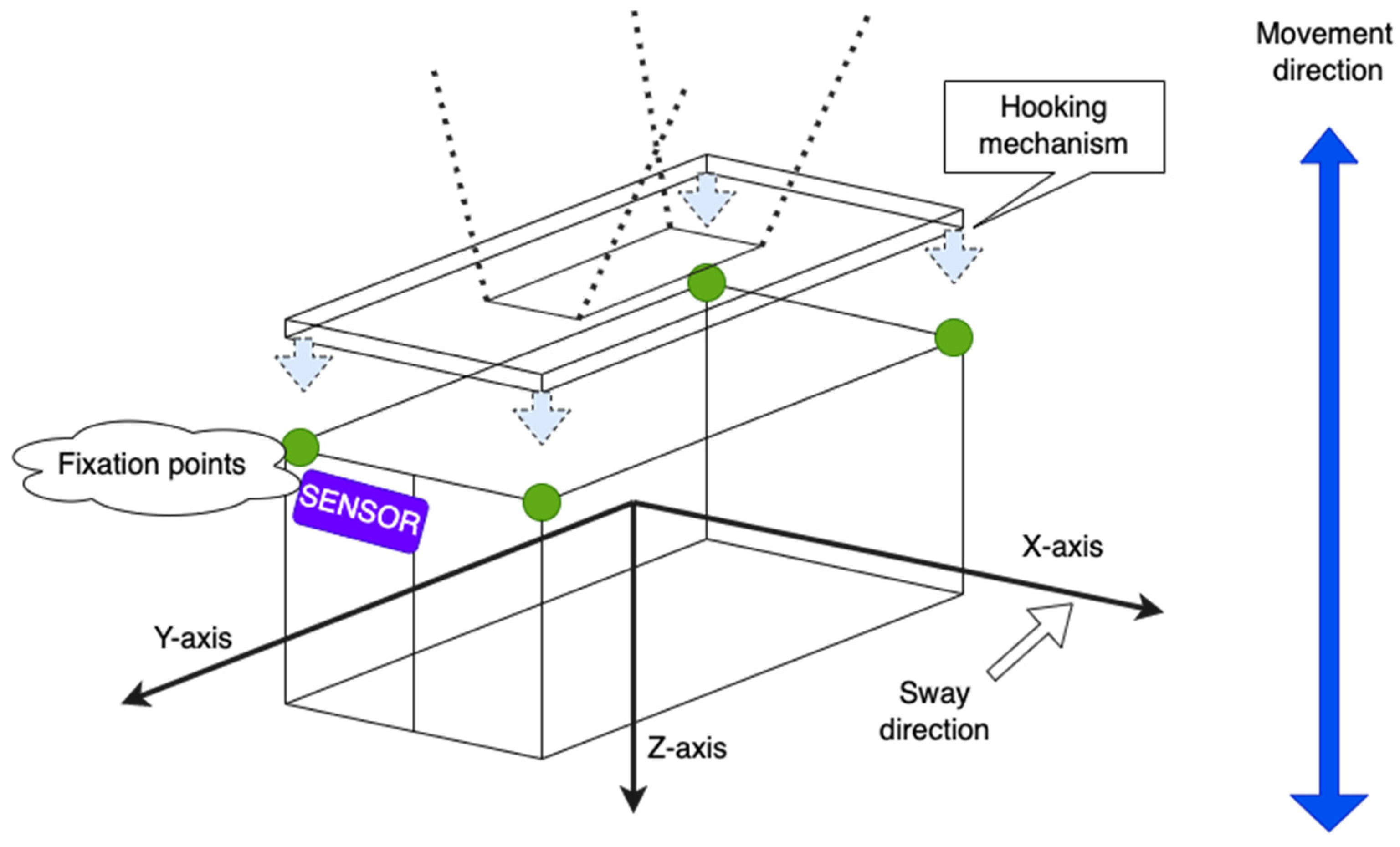
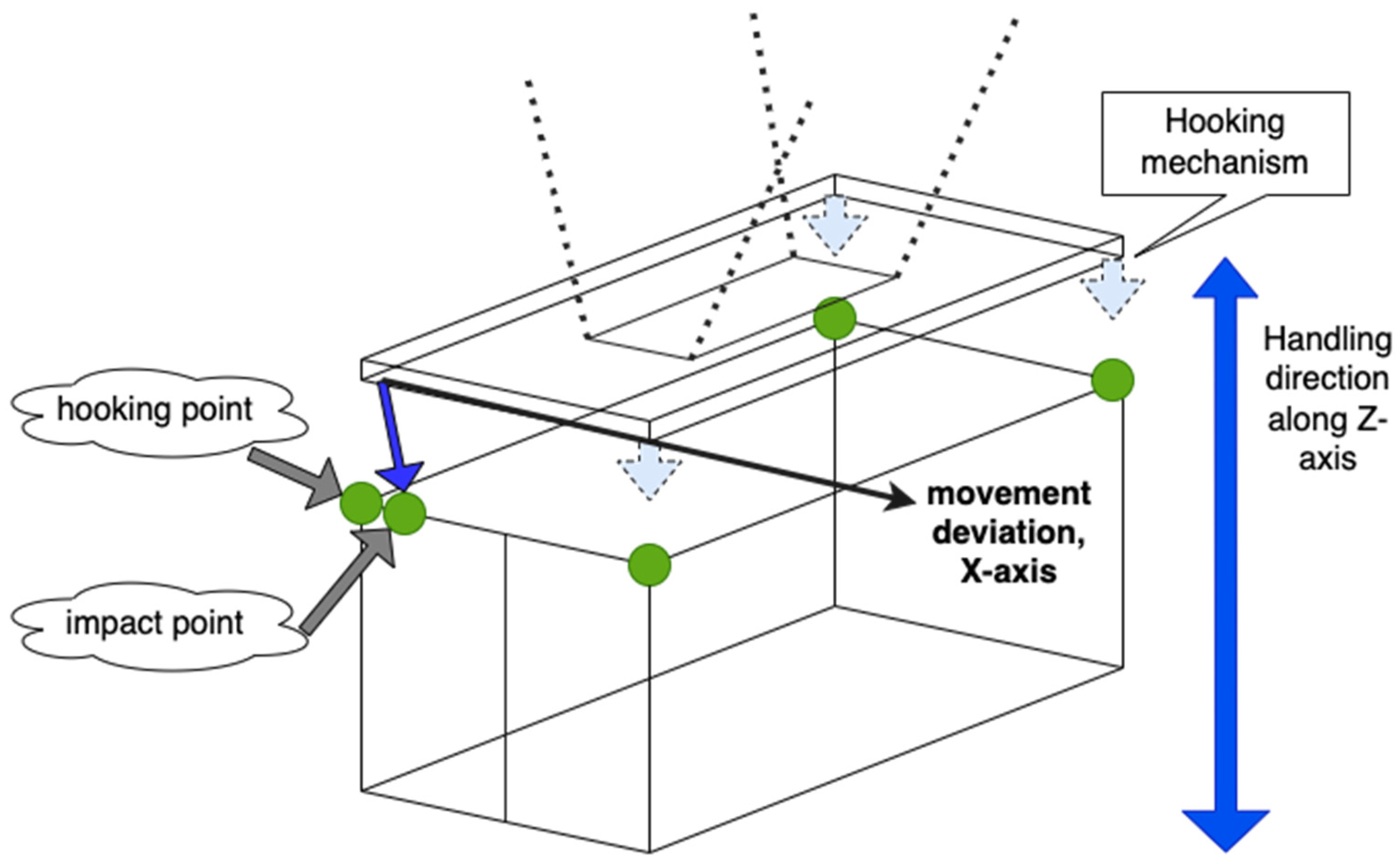
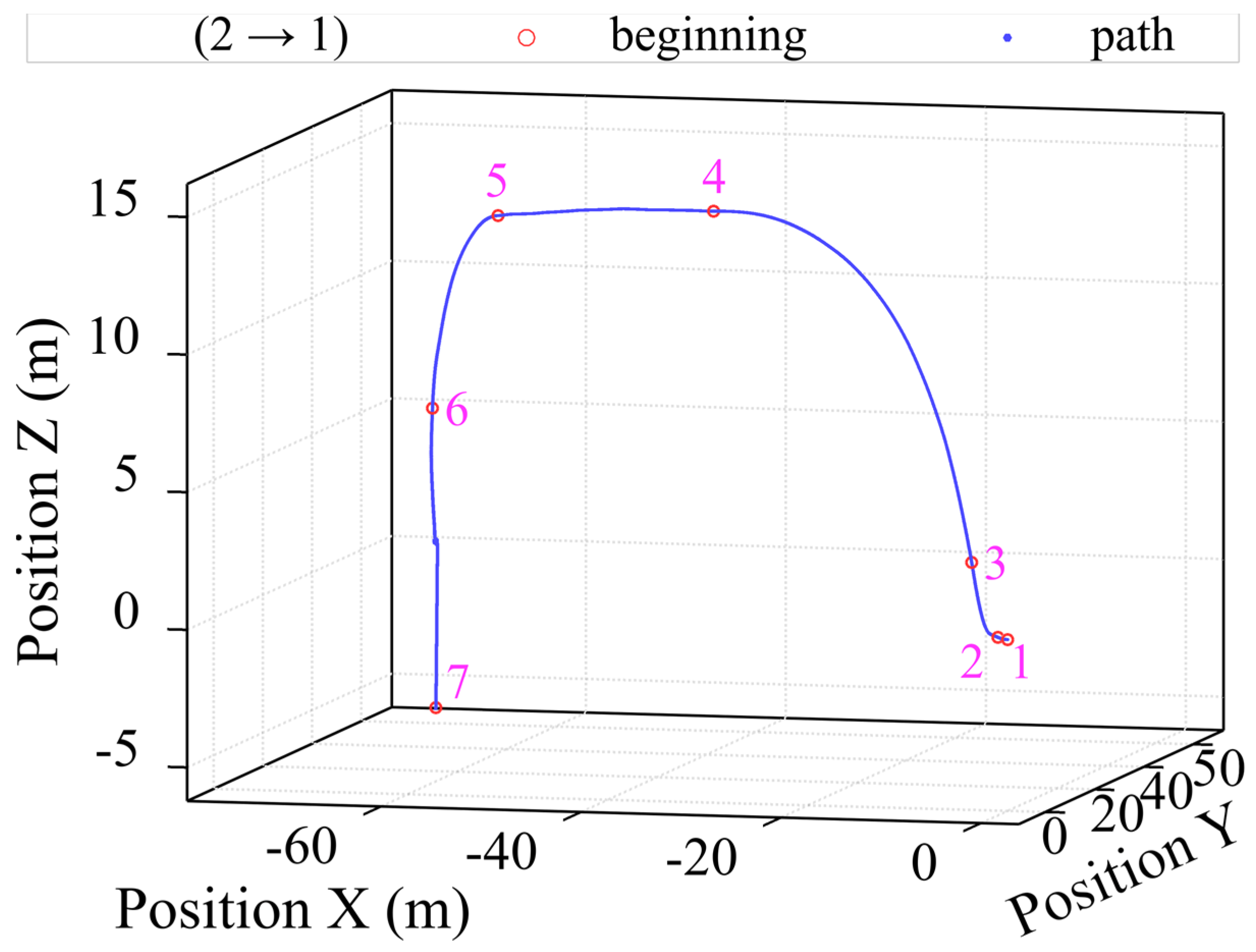
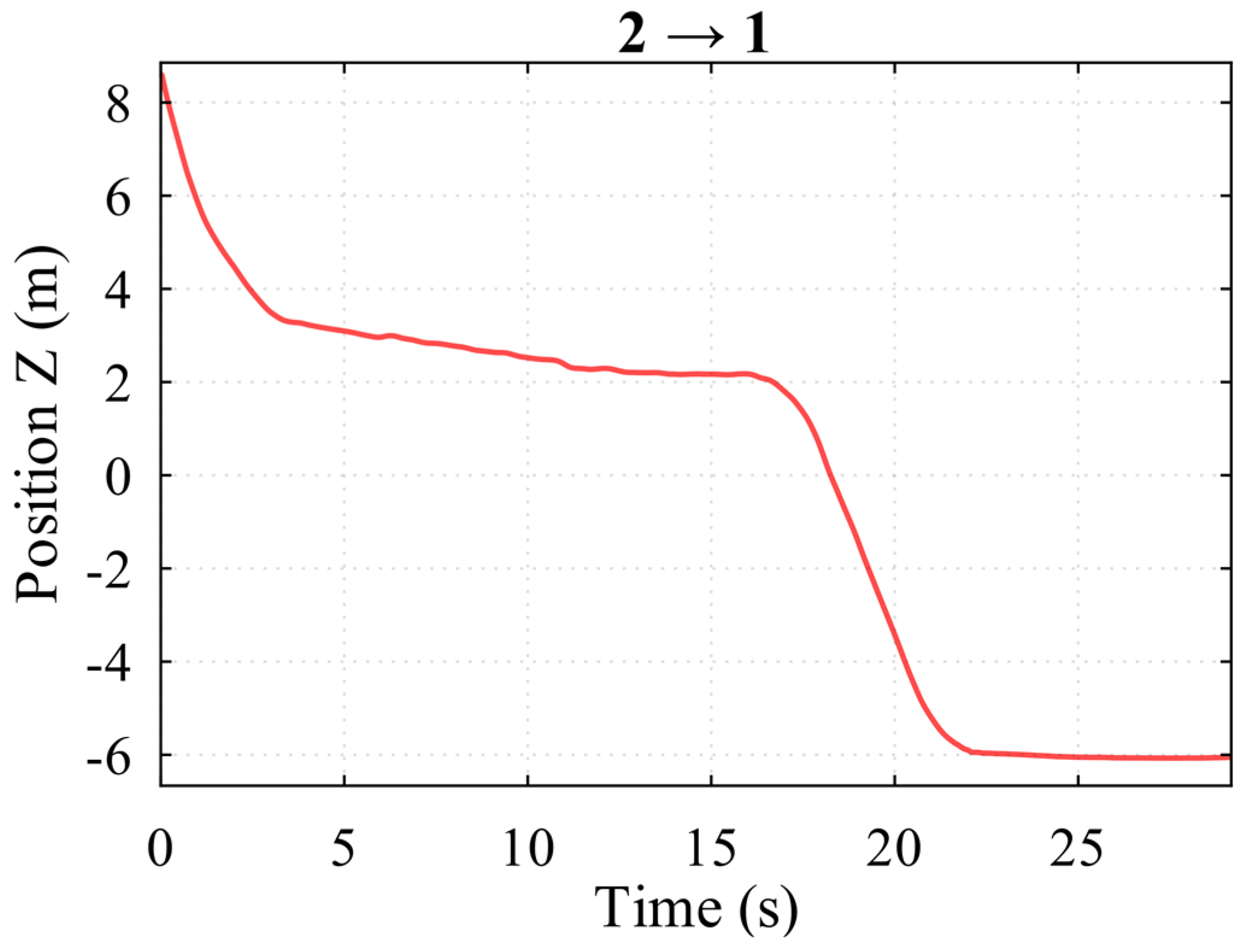
1.3. Definition of the Dynamics
- -
- Starting with point one, the spreader is unhooked from the previously transported container;
- -
- Then going to point six, the vertical lowering of the spreader towards the container begins;
- -
- Ending with point seven, the spreader finally touches the container, which is followed by the physical hooking to the container using the contact points.
2. Methodology
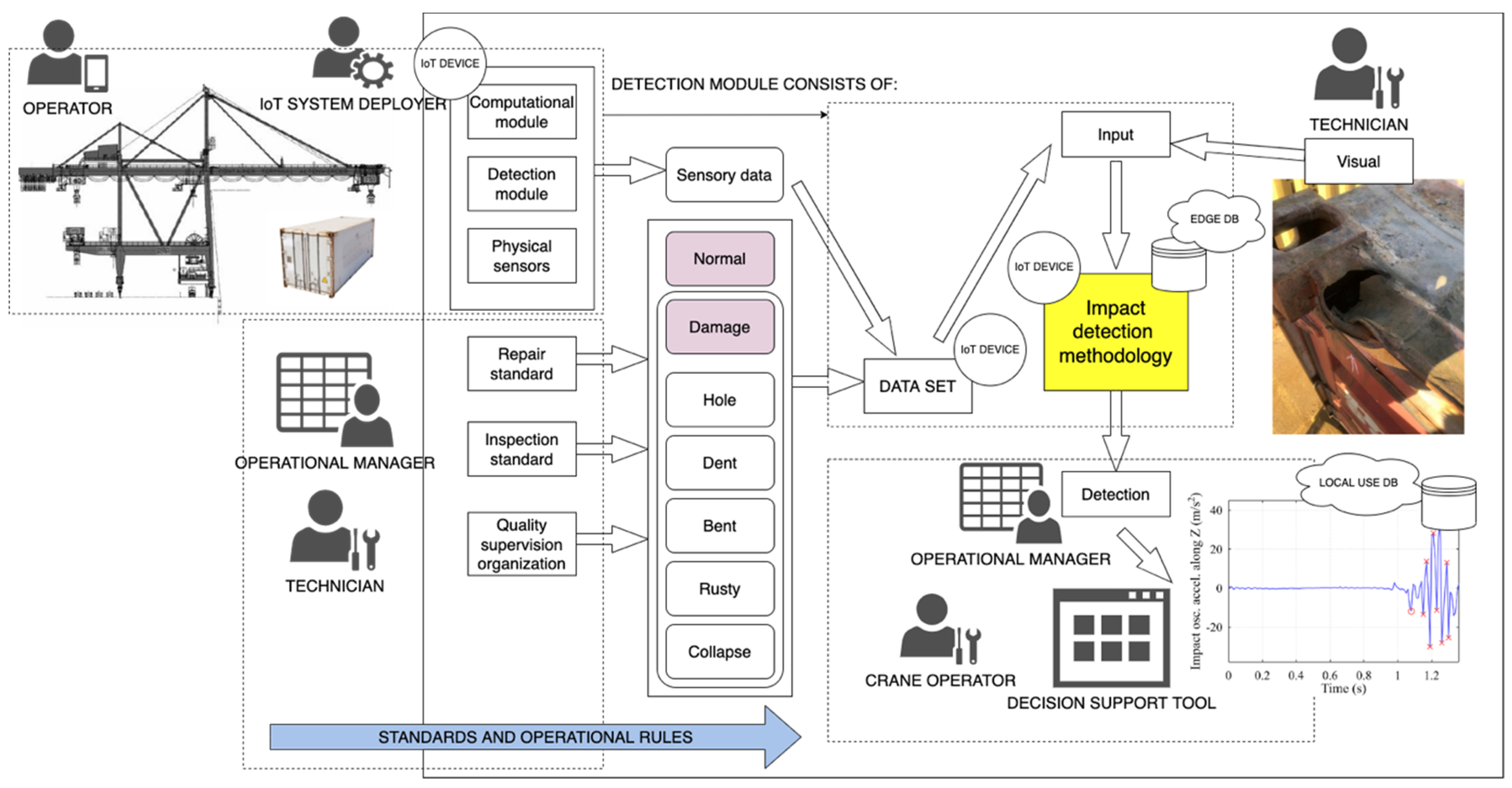
2.1. Impact Detection Methodology: Introduction
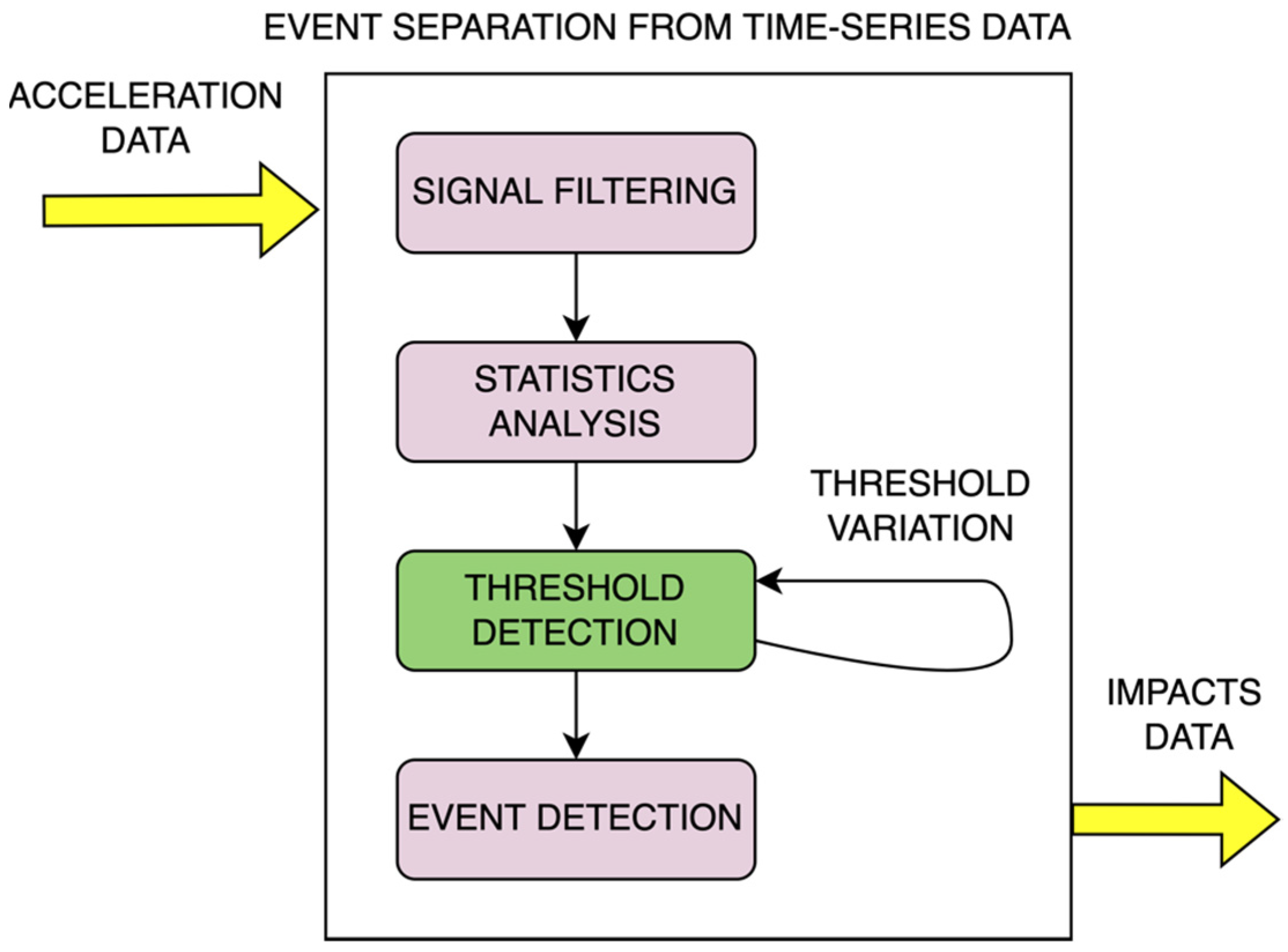
2.2. Detection of Impact Events: Background
- af—an array of filtered accelerations;
- Si—an array of the half-wave indices;
- E—an array of the half-waves end indices;
- M—the number of the half-waves;
- p—the values of the extremums found;
- pidx—the positions of the found extremums in the array of the filtered accelerations.
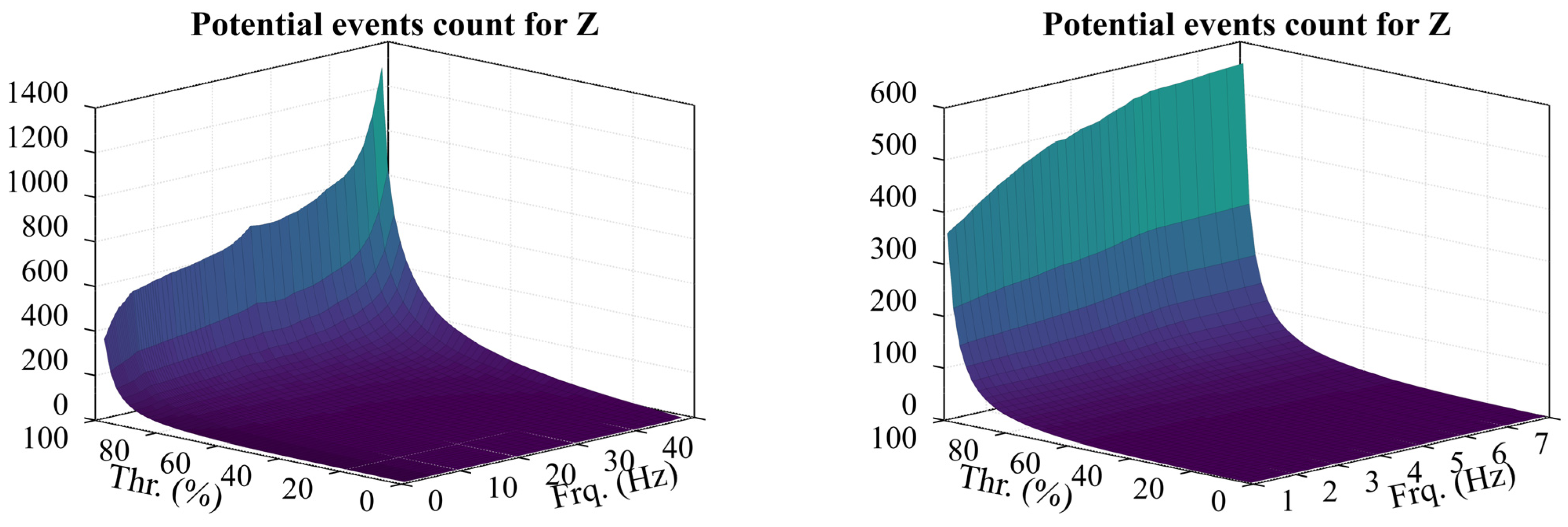
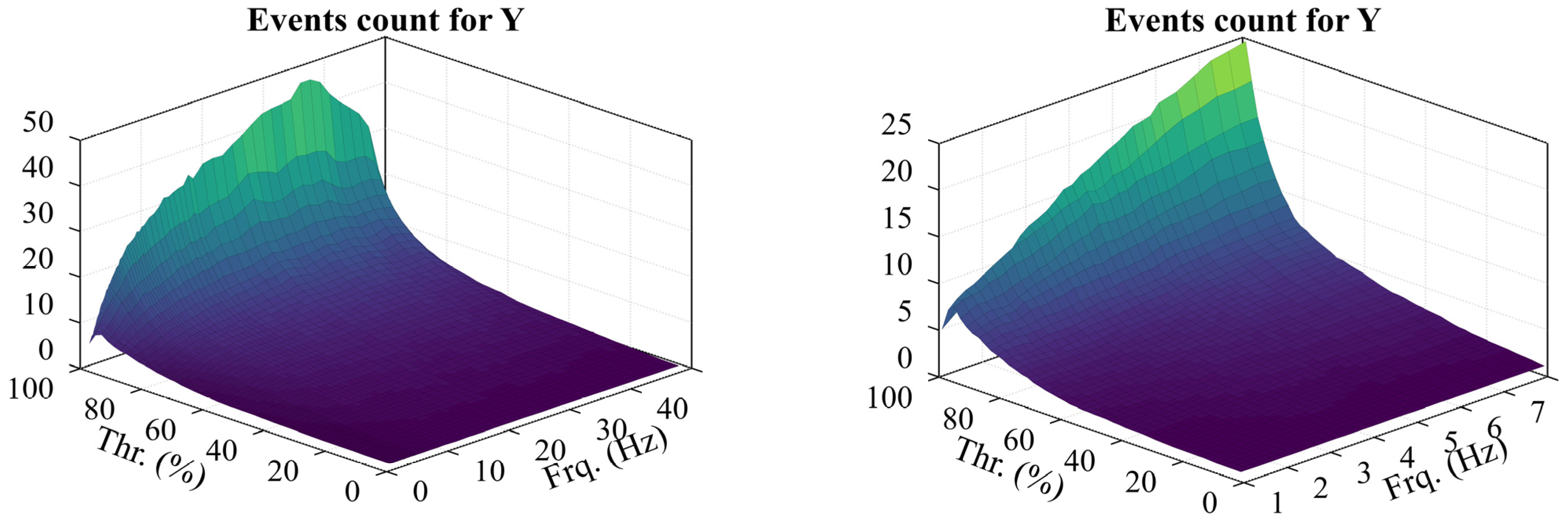
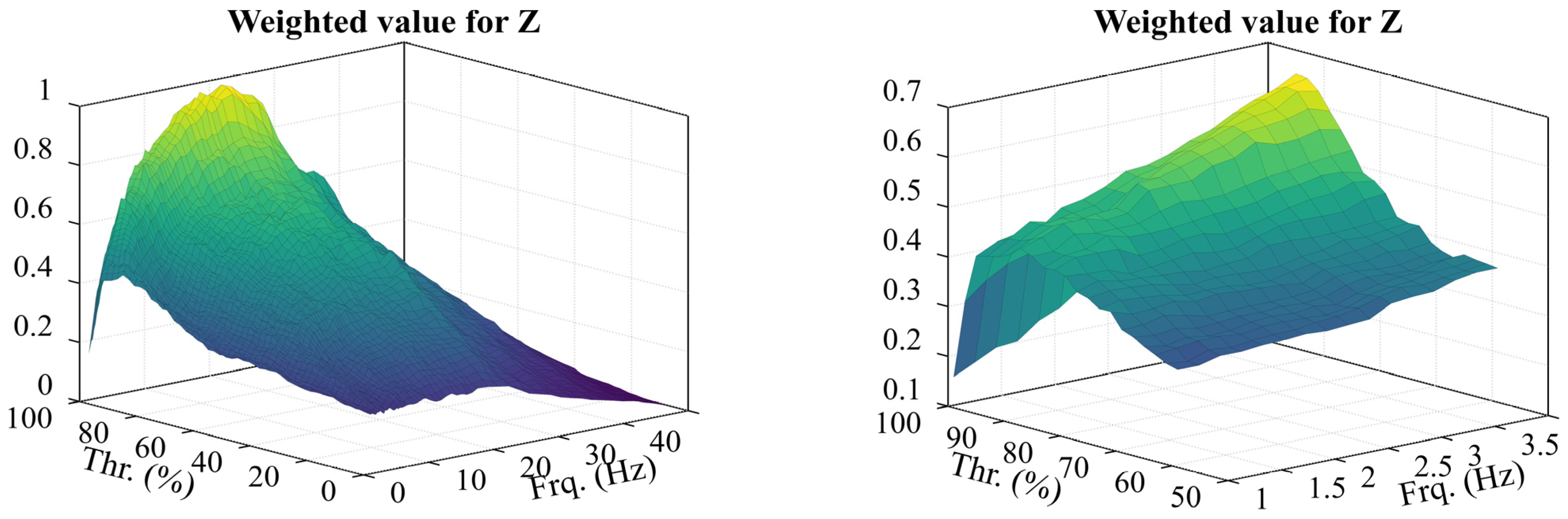
2.3. Acquisition of Optimal Parameters for Impacts Detection
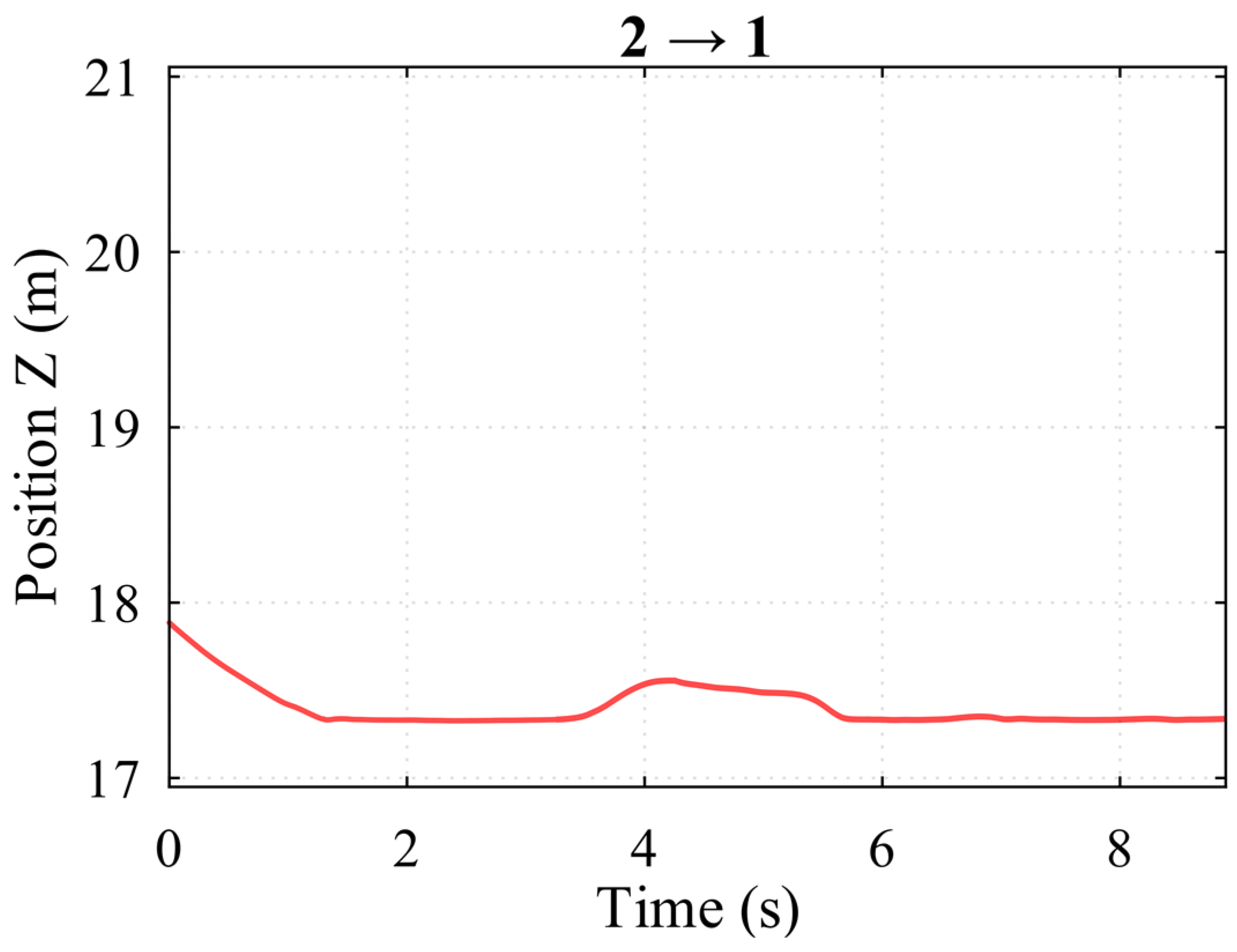
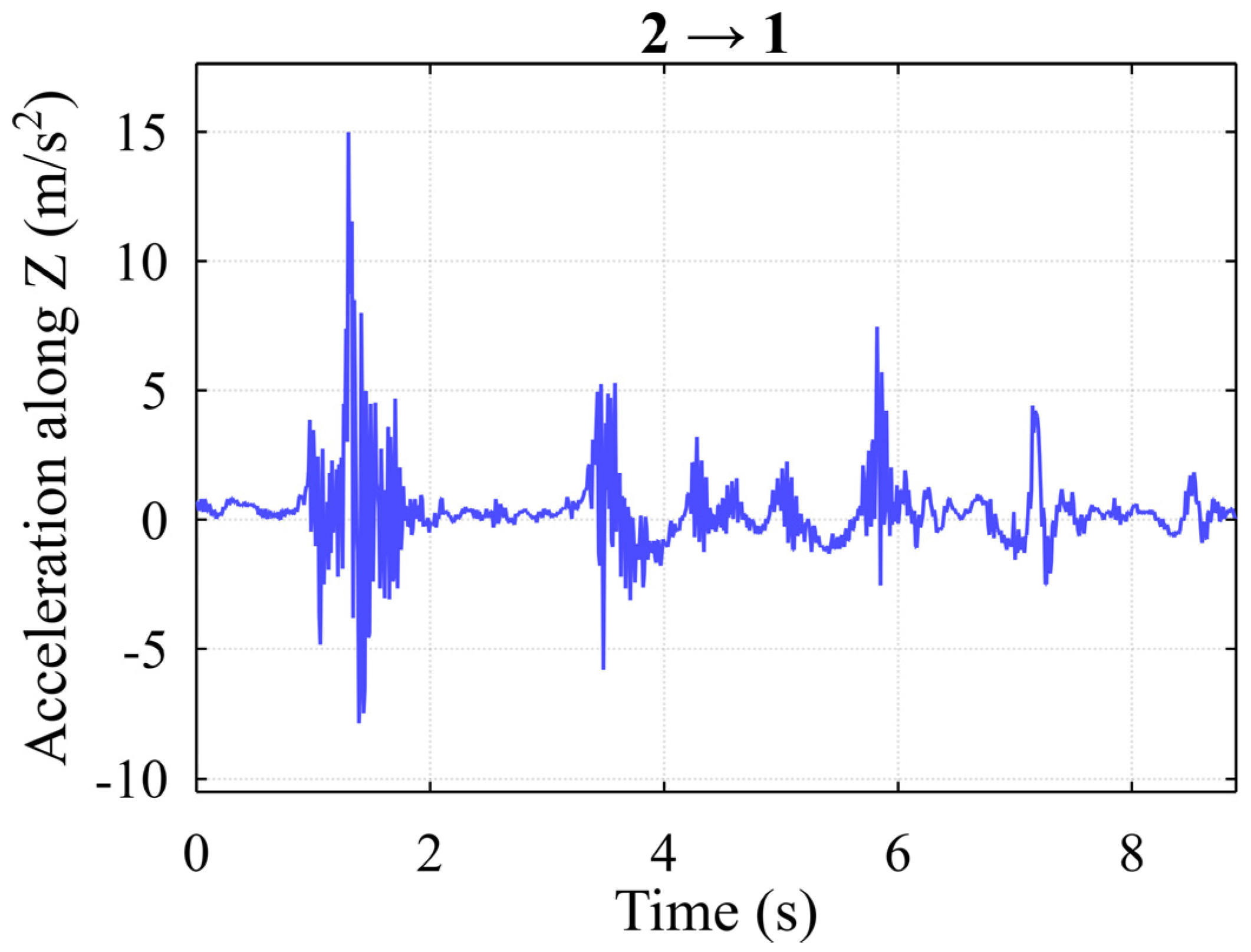
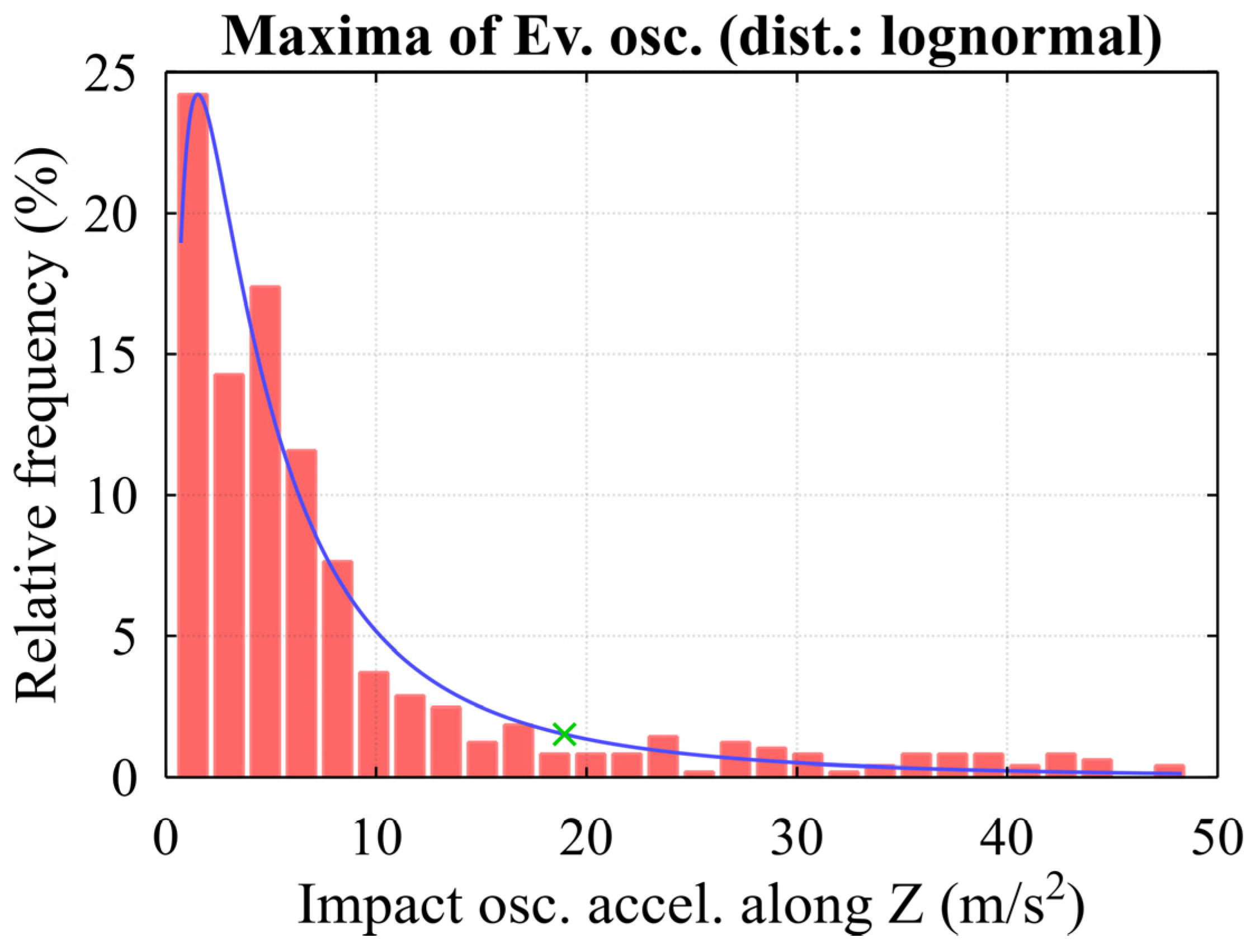
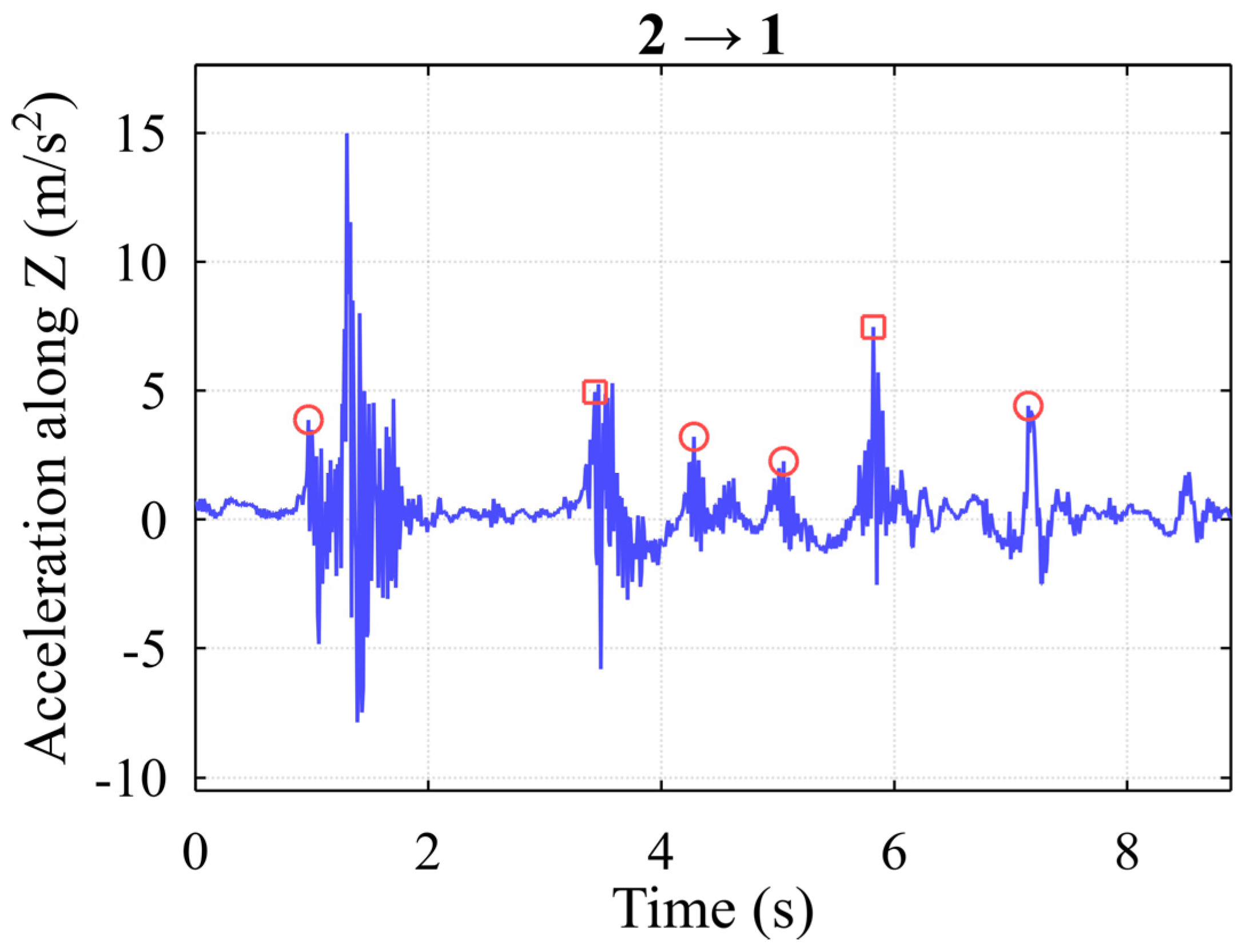
2.4. Detection of Repeated Impacts (Re-Impacts) to the Same Areas
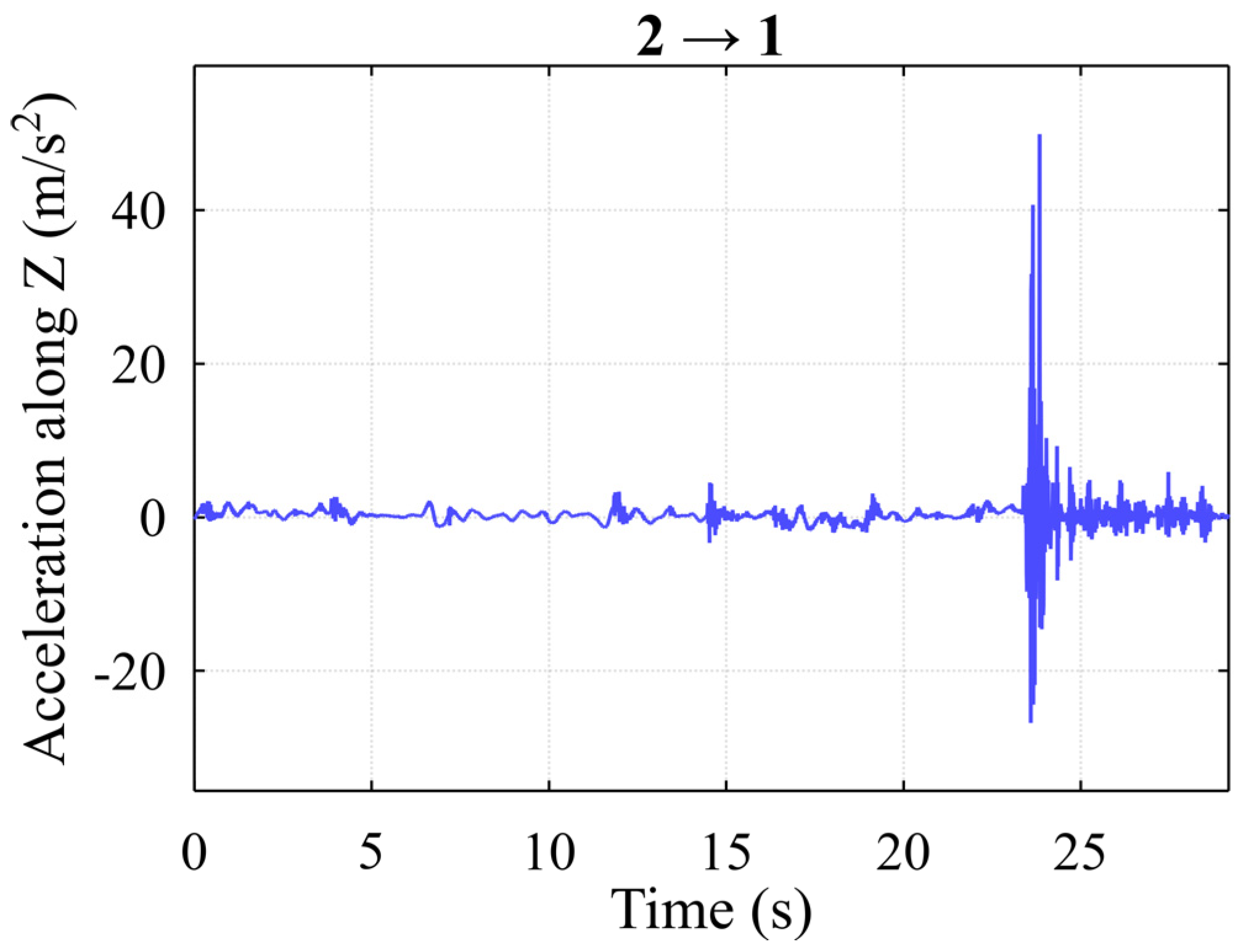
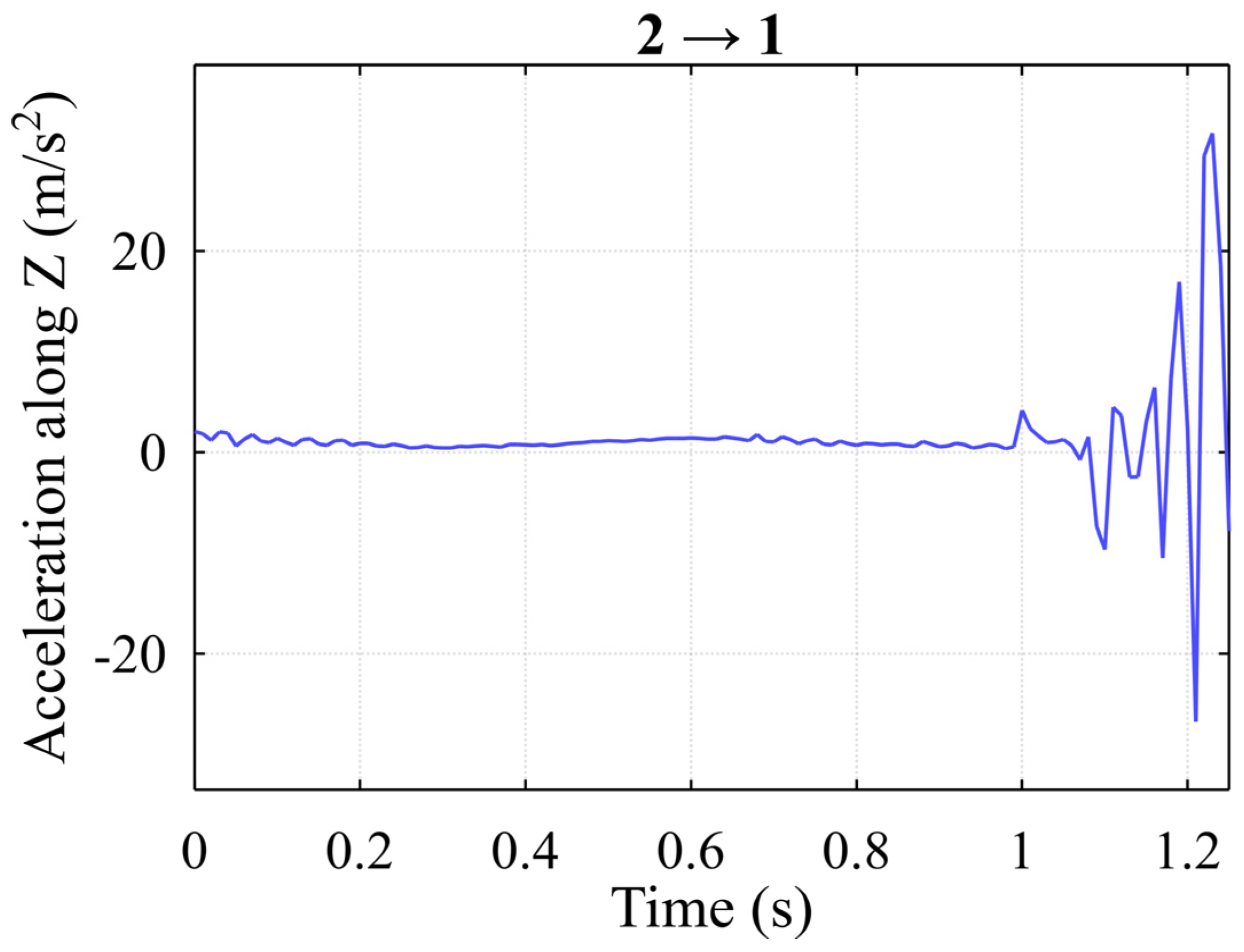
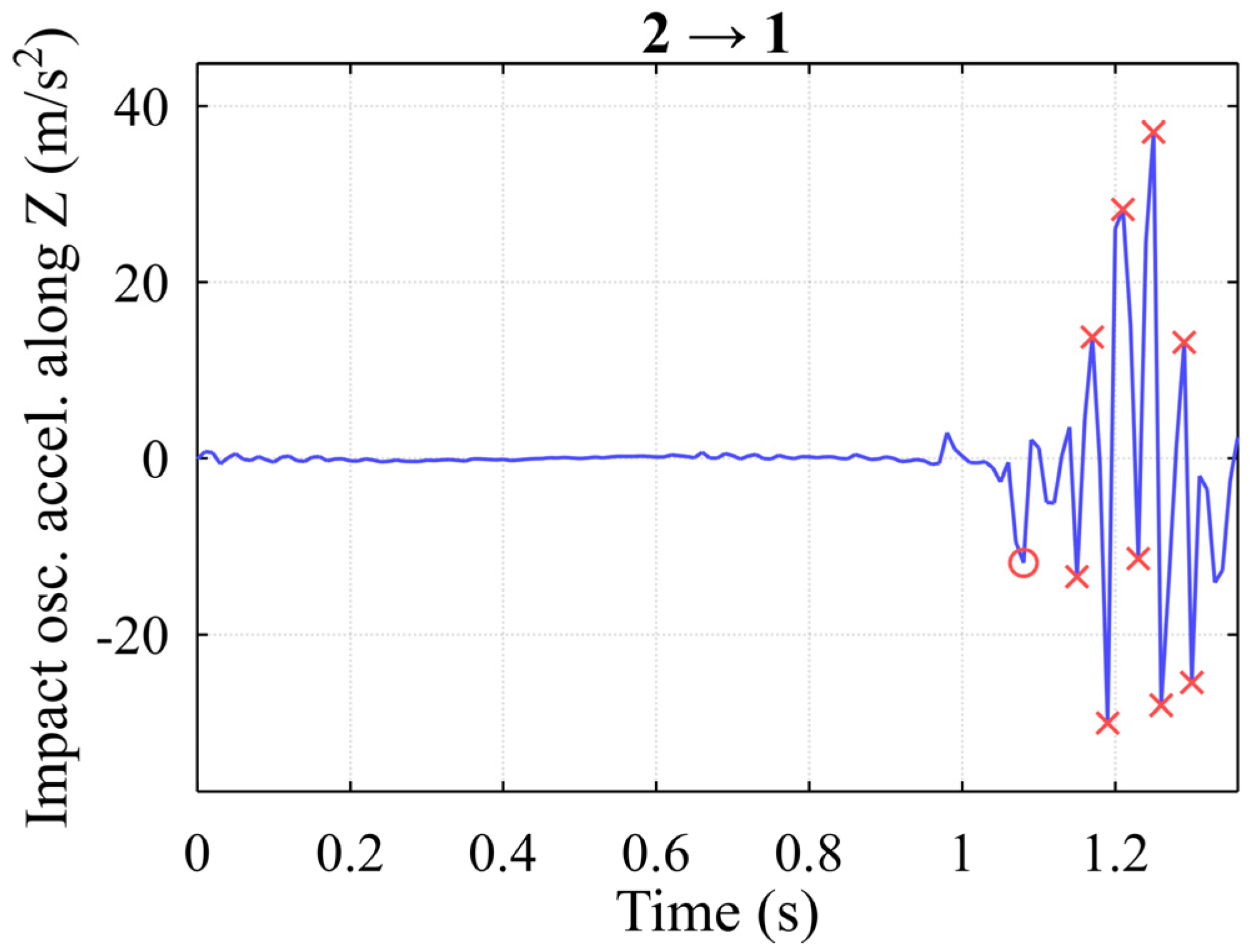
- The vertical acceleration oscillations of the primary impact have the largest amplitude;
- The amplitudes of the re-impact oscillations are smaller, yet close in comparison;
- Each next impact stays almost identical in oscillation to the second one.
3. Results and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, C.H.; Xu, J.; Song, D.P. An Analysis of Safety and Security Risks in Container Shipping Operations: A Case Study of Taiwan. Saf. Sci. 2014, 63, 168–178. [Google Scholar] [CrossRef]
- Sepehri, A.; Vandchali, H.R.; Siddiqui, A.W.; Montewka, J. The Impact of Shipping 4.0 on Controlling Shipping Accidents: A Systematic Literature Review. Ocean Eng. 2022, 243, 110162. [Google Scholar] [CrossRef]
- Eglynas, T.; Jusis, M.; Jakovlev, S.; Senulis, A.; Partila, P.; Gudas, S. Research of Quay Crane Control Algorithm with Embedded Sway Control Sub-Routine. In Proceedings of the 2019 27th Telecommunications Forum (TELFOR), Belgrade, Serbia, 26–27 November 2019; pp. 17–20. [Google Scholar] [CrossRef]
- Eglynas, T.; Jusis, M.; Jakovlev, S.; Senulis, A.; Andziulis, A.; Gudas, S. Analysis of the Efficiency of Shipping Containers Handling/Loading Control Methods and Procedures. Adv. Mech. Eng. 2019, 11, 1–12. [Google Scholar] [CrossRef]
- Jakovlev, S.; Eglynas, T.; Jusis, M.; Gudas, S.; Jankunas, V.; Voznak, M. Use Case of Quay Crane Container Handling Operations Monitoring Using ICT to Detect Abnormalities in Operator Actions. In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems, Online, 2–4 May 2020; pp. 63–67. [Google Scholar] [CrossRef]
- Jakovlev, S.; Eglynas, T.; Voznak, M.; Jusis, M.; Partila, P.; Tovarek, J.; Jankunas, V. Detecting Shipping Container Impacts with Vertical Cell Guides inside Container Ships during Handling Operations. Sensors 2022, 22, 2752. [Google Scholar] [CrossRef] [PubMed]
- Moron, C.; Garcia, A.; Ferrandez, D. New System for Measuring Impact Vibration on Floor Decking Sheets. Sensors 2015, 15, 635–641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, C.; Wen, G.; Wu, X.; Wang, W.; Han, L.; Zhang, F. Using an Acoustic Sensor and Accelerometer to Measure the Downhole Impact Frequency of a Hydraulic Impactor. J. Nat. Gas Sci. Eng. 2015, 27, 1296–1303. [Google Scholar] [CrossRef]
- Li, D.; Zheng, Z.L.; Tian, Y.; Sun, J.Y.; He, X.T.; Lu, Y. Stochastic Nonlinear Vibration and Reliability of Orthotropic Membrane Structure under Impact Load. Thin-Walled Struct. 2017, 119, 247–255. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Núñez, A. Railway Infrastructure. InnoTrans 2014 Rep. 2014, 18, 1980–1990. [Google Scholar]
- Wiseman, Y. Safety Mechanism for SkyTran Tracks. Int. J. Control Autom. 2017, 10, 51–60. [Google Scholar] [CrossRef]
- Pu, Y.; Jiang, J.; Lin, Y. Research on Container Monitoring Security Infrastructure. In Proceedings of the 2007 International Conference on Convergence Information Technology (ICCIT 2007), Gwangju, Korea, 21–23 November 2007; pp. 2030–2033. [Google Scholar] [CrossRef]
- Hoffmann, N.; Stahlbock, R.; Voß, S. A Decision Model on the Repair and Maintenance of Shipping Containers. J. Shipp. Trade 2020, 5, 22. [Google Scholar] [CrossRef]
- Jakovlev, S.; Andziulis, A.; Senulis, A.; Voznak, M. Intermodal Containers Transportation: How to Deal with Threats? In Proceedings of the VEHITS 2019-Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems, Crete, Greece, 3–5 May 2019. [Google Scholar]
- Golovin, I.; Palis, S. Robust Control for Active Damping of Elastic Gantry Crane Vibrations. Mech. Syst. Signal Process. 2019, 121, 264–278. [Google Scholar] [CrossRef]
- Zhou, W.; Feng, Z.; Xu, Y.F.; Wang, X.; Lv, H. Empirical Fourier Decomposition: An Accurate Signal Decomposition Method for Nonlinear and Non-Stationary Time Series Analysis. Mech. Syst. Signal Process. 2022, 163, 108155. [Google Scholar] [CrossRef]
- Vivas, G.; González, J.; Etxaniz, J.; Aranguren, G. Proof of Concept for Impact and Flaw Detection in Airborne Structures. Procedia Struct. Integr. 2021, 37, 344–350. [Google Scholar] [CrossRef]
- Katunin, A.; Rucevskis, S. Effectiveness of Damage Identification in Composite Plates Using Damage Indices Based on Smoothing Polynomials and Curvelet Transform: A Comparative Study. Procedia Struct. Integr. 2021, 37, 292–298. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, W.; Zhang, F.; Wang, X. Early Rub-Impact Fault Detection of Rotor Systems via Deterministic Learning. Control Eng. Pract. 2022, 124, 105190. [Google Scholar] [CrossRef]
- Boffa, N.D.; Arena, M.; Monaco, E.; Viscardi, M.; Ricci, F.; Kundu, T. About the Combination of High and Low Frequency Methods for Impact Detection on Aerospace Components. Prog. Aerosp. Sci. 2022, 129, 100789. [Google Scholar] [CrossRef]
- Bukkapatnam, S.T.S.; Mukkamala, S.; Kunthong, J.; Sarangan, V.; Komanduri, R. Real-Time Monitoring of Container Stability Loss Using Wireless Vibration Sensor Tags. In Proceedings of the 2009 IEEE International Conference on Automation Science and Engineering, Bangalore, India, 22–25 August 2009; pp. 221–226. [Google Scholar] [CrossRef]
- Jakovlev, S.; Eglynas, T.; Voznak, M. Application of Neural Network Predictive Control Methods to Solve the Shipping Container Sway Control Problem in Quay Cranes. IEEE Access 2021, 9, 78253–78265. [Google Scholar] [CrossRef]
- Wan, S.; Yang, X.; Chen, X.; Qu, Z.; An, C.; Zhang, B.; Lee, K.; Bi, H. Emerging marine pollution from container ship accidents: Risk characteristics, response strategies, and regulation advancements. J. Clean. Prod. 2022, 376, 134266. [Google Scholar] [CrossRef]
- Chen, X.; Liu, S.; Liu, R.W.; Wu, H.; Han, B.; Zhao, J. Quantifying Arctic oil spilling event risk by integrating an analytic network process and a fuzzy comprehensive evaluation model. Ocean. Coast. Manag. 2022, 228, 106326. [Google Scholar] [CrossRef]




























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jakovlev, S.; Eglynas, T.; Jusis, M.; Voznak, M.; Partila, P.; Tovarek, J. Detecting Physical Impacts to the Corners of Shipping Containers during Handling Operations Performed by Quay Cranes. J. Mar. Sci. Eng. 2023, 11, 794. https://doi.org/10.3390/jmse11040794
Jakovlev S, Eglynas T, Jusis M, Voznak M, Partila P, Tovarek J. Detecting Physical Impacts to the Corners of Shipping Containers during Handling Operations Performed by Quay Cranes. Journal of Marine Science and Engineering. 2023; 11(4):794. https://doi.org/10.3390/jmse11040794
Chicago/Turabian StyleJakovlev, Sergej, Tomas Eglynas, Mindaugas Jusis, Miroslav Voznak, Pavol Partila, and Jaromir Tovarek. 2023. "Detecting Physical Impacts to the Corners of Shipping Containers during Handling Operations Performed by Quay Cranes" Journal of Marine Science and Engineering 11, no. 4: 794. https://doi.org/10.3390/jmse11040794
APA StyleJakovlev, S., Eglynas, T., Jusis, M., Voznak, M., Partila, P., & Tovarek, J. (2023). Detecting Physical Impacts to the Corners of Shipping Containers during Handling Operations Performed by Quay Cranes. Journal of Marine Science and Engineering, 11(4), 794. https://doi.org/10.3390/jmse11040794