
A Smart Risk Assessment Tool for Decision Support during Ship Evacuation

 , ,
, ,  and
and
Abstract
:1. Introduction
- Whether to sound the general alarm (GA);
- Monitoring the progress of the mustering process in order to take any additional actions if required;
- Whether to abandon the ship or not.
2. Using Bayesian Networks for Risk Assessment in the Maritime Domain
3. Analysis of Accidents
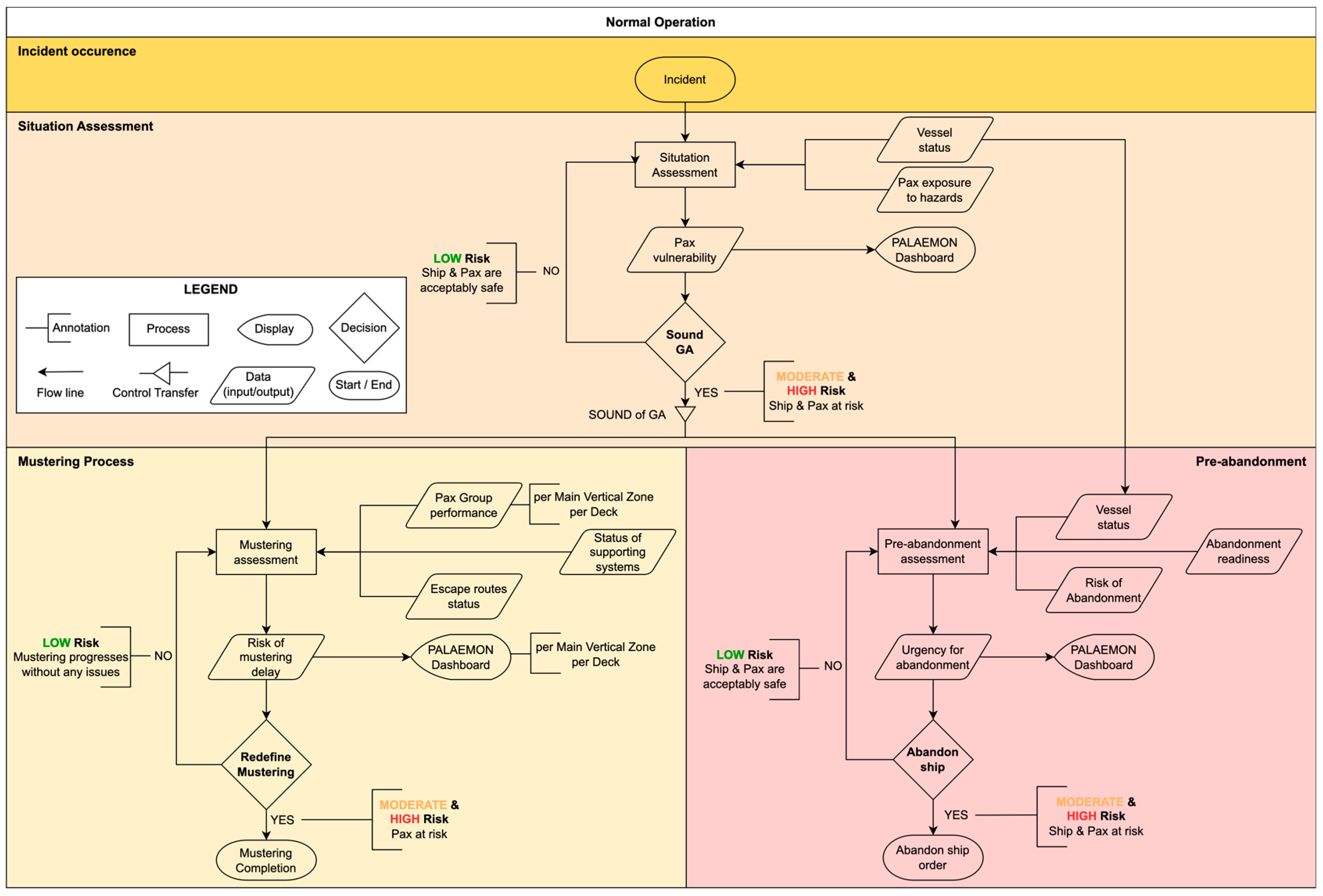
4. The SRAP Concept
- Situation assessment model
- Mustering assessment model
- Pre-abandonment model
5. Methodology
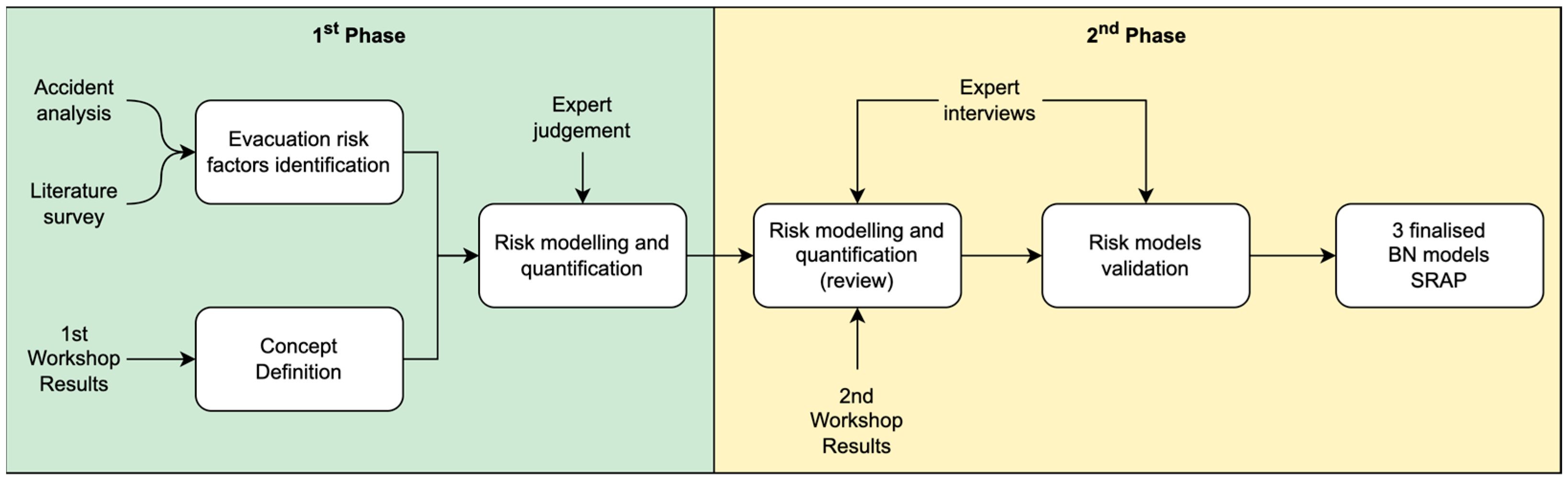
- Identifying the factors and parameters that affect risk during a ship evacuation (through accident analysis, a literature survey, and the utilisation of the results of a workshop conducted in the context of the PALAEMON project). The workshop was attended by 44 participants from different sectors of the maritime domain who provided valuable feedback through a questionnaire and a series of discussions.
- Developing the risk models, which included representing the relationships among the identified risk factors based on expert judgement, and quantifying the BNs.
- Validating the developed risk models by engaging two experts (one principal surveyor of a classification society and one marine operations director and former cruise ship master) in interviews and revising the risk models. The interviewees expertise fully covered the validation process at this stage.
- Reviewing and revising the models based on the experts’ comments from the first phase as well as from the results of a 2nd workshop conducted in the context of the PALAEMON project. The second PALAEMON workshop was hosted online due to COVID-19-related measures. It was attended by 25 participants representing stakeholders from various sectors of the maritime domain. Similarly to the 1st workshop, the attendees provided their input through a questionnaire and a series of discussions.
- Validating and finalising the models by engaging 9 people in the maritime domain (including a master of a cruise ship) in additional interviews.
6. Risk Factors
6.1. Situation Assessment Model
- Floatability, stability, and watertight integrity;
- Structural integrity;
- Fire safety integrity;
- Status of the critical systems for the ship’s controllability and navigation;
- Status of the critical systems for communication (internal and external);
- Passengers’ exposure and readiness.
6.2. Mustering Assessment Model
- Potential for individual injuries;
- The efficient movement of individuals;
- Individual status;
- Group performance;
- Status of supporting systems;
- Status of escape routes;
- The availability of muster stations;
- Passenger flow in an area.
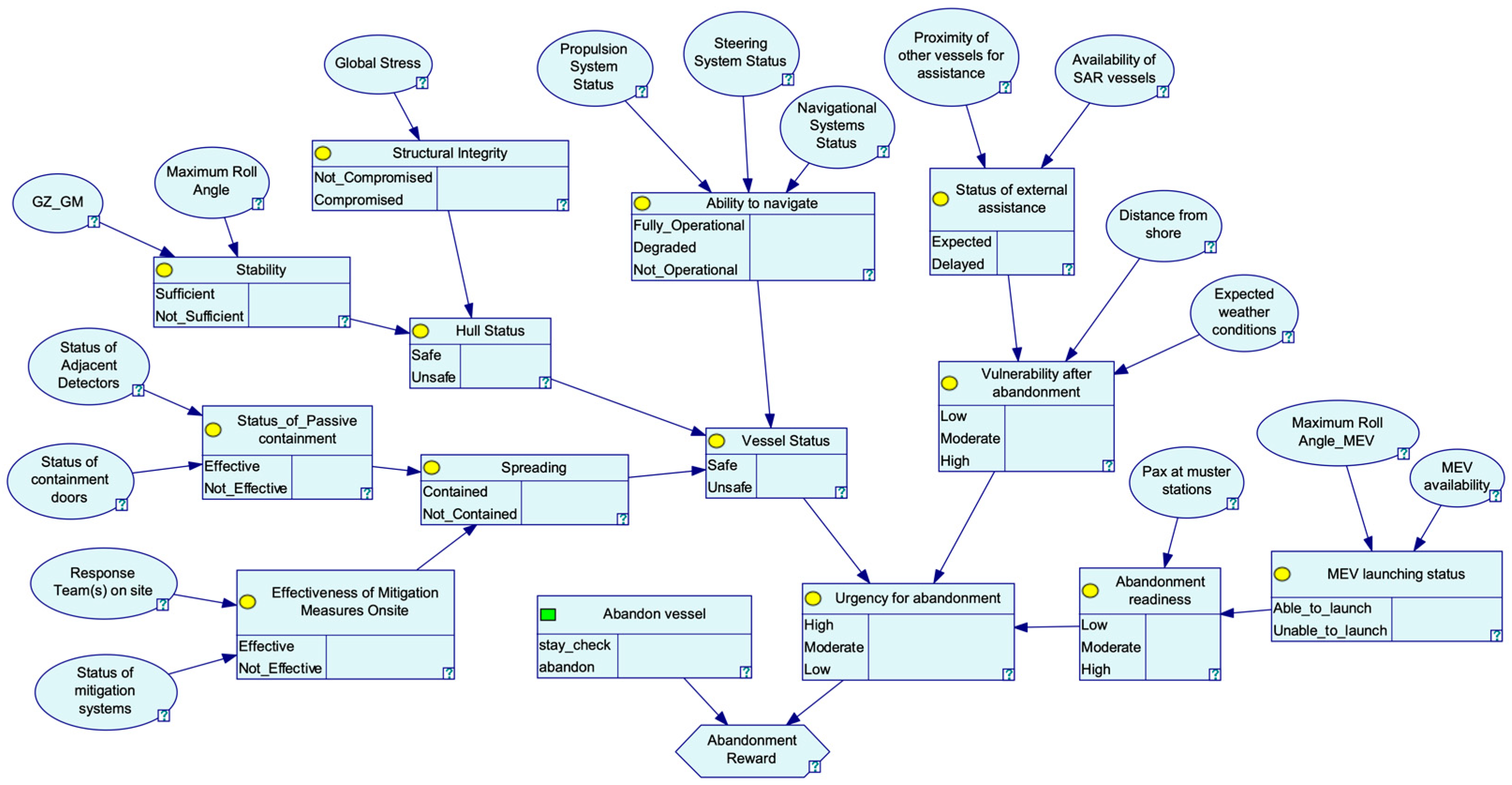
6.3. Pre-Abandonment Model
- Vessel status: The status of the vessel given the occurrence of an incident is indicative of whether the safety of the passengers and crew on board may be directly affected by the conditions in the ship environment. If the people on board are in danger of being exposed to hazards, the urgency for abandonment increases. Exposure can occur if containing the incident (e.g., fire or flooding) has not been successful during the previous phases of the evacuation process. The critical condition to be considered is the uncontrollable spreading of the incident that makes the vessel unsafe, therefore leading to a great urgency for abandonment. Exposure can also occur if the stability and structural integrity of the vessel has been compromised to a point when there is an imminent danger of capsizing and a loss of watertight integrity and flooding, respectively. The critical conditions that would make the vessel unsafe and should be considered for the given damage, ship loading, and weather conditions are: (a) whether the ship will capsize, taking into account progressive flooding; and (b) whether the ship’s structure may collapse (globally).
- Vulnerability after abandonment: An important parameter that affects the master’s decision to order the abandonment process is the vulnerability of the people on board after abandoning the vessel, which indicates the potential adverse consequences to their health and safety given their exposure to environmental hazards. The importance of this factor was identified in the analysis of the marine accidents that involved an evacuation described in Section 3. The critical conditions that would increase vulnerability after abandonment relate to: (a) the expected duration of people’s exposure to environmental hazards, considering the adversity of the weather conditions, the availability of external help either for mitigating the incident, or providing immediate assistance to people after the abandonment, and (b) the potential consequences to people if they remain on board compared to being exposed to environmental hazards. In general, a high level of vulnerability after an abandonment combined with a safe vessel would lead to a low urgency for abandonment. However, an unsafe vessel could trigger an abandonment.
- Abandonment readiness: The readiness to abandon the vessel depends on whether all people on board have assembled at the mustering stations, whether they can safely board the MEVs, and whether the MEVs can be safely launched. If any one of these preconditions are not met, then the master will most likely not order the abandonment of the vessel, according to the feedback obtained from the expert interviews. The importance of all people being accounted for in the mustering stations is also evident from the accident involving the Ro-Pax ferry Queen of the North in 2006. In that case, the lack of a clear and structured way of accounting for the mustered people led to the abandonment order being delayed until the correct total number of mustered passengers were counted. The critical conditions that would decrease the abandonment readiness relate to: (a) a small number (e.g., lower than 50% of the people on board) of assembled people at the mustering stations, (b) damages to the MEVs that affect their seaworthiness or conditions that prevent the mustered people from safely boarding the MEVs (e.g., fire spreading close to the MEVs), and (c) the capability of the launching system to operate as expected given the conditions on the vessel (e.g., power availability, large heel angle, etc.). Therefore, the readiness of the people and the escape means that to abandon the vessel is considered a very important factor that affects the decision to order the abandonment. For example, a small number of mustered people will likely not lead to an abandonment regardless of the level of vulnerability after the abandonment and the status of the vessel, except in cases where the incident is developing rapidly (e.g., rapid flooding leading to sinking).
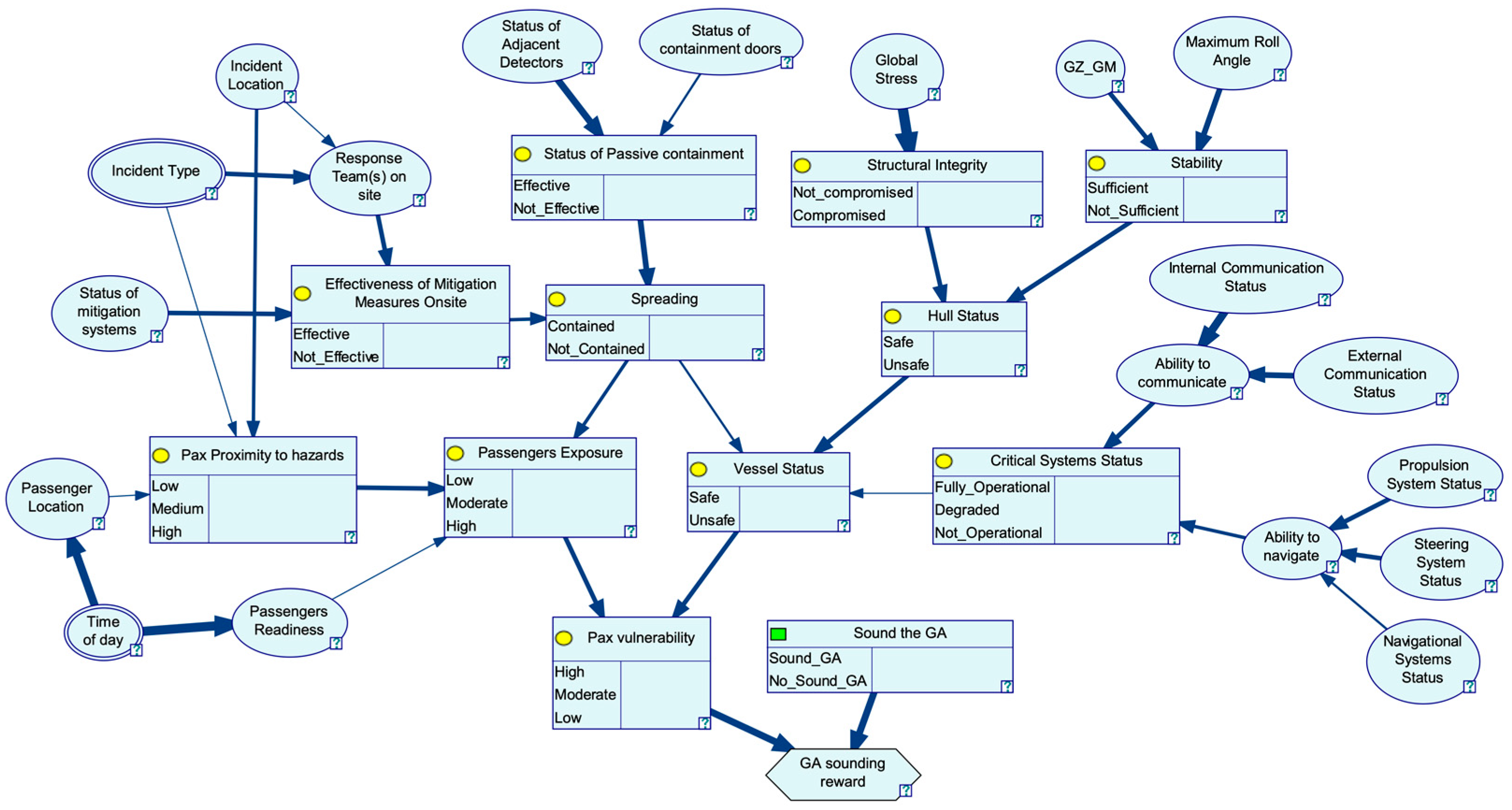
7. Bayesian Network
7.1. Situation Assessment Model
7.2. Mustering Assessment Model
- The passenger’s (individual) status with respect to the efficiency of his/her movement towards the muster station as well as his/her health status.
- The group performance of the passengers in the examined deck considering an individual’s performance and the characteristics of the deck related to a passenger’s attempt to approach the muster station, such as the distance of the deck from the muster station and the existence of congested areas.
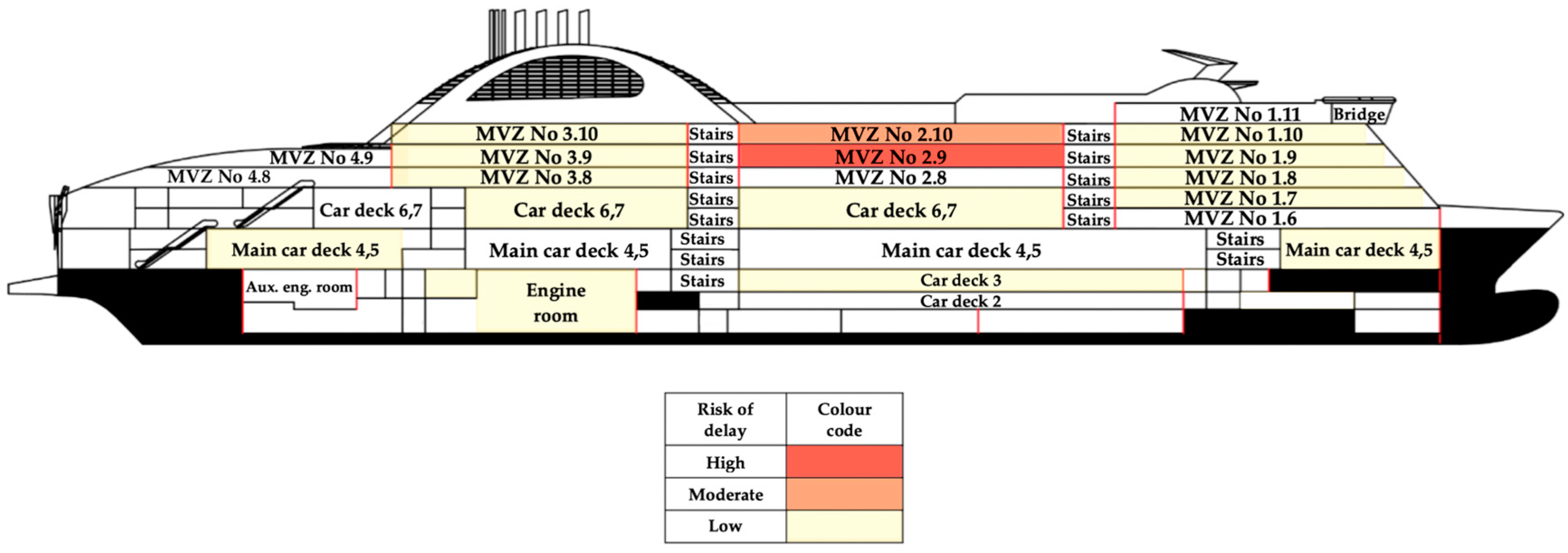
- The risk of delay of the mustering process, which is assumed to be associated with the status of the evacuation routes and of the ship systems that support the mustering process. The risk of delay is also visually presented as shown in an indicative example in Figure 5.
7.3. Pre-Abandonment Model
8. Quantification
8.1. Situation Assessment Model
8.2. Mustering Assessment Model
- Movement efficiency (passenger speed, heart rate, O2 saturation): the most critical factor that affects movement efficiency is the passenger speed, followed by O2 saturation and heart rate, which can also affect movement.
- Potential for injuries (the presence of hazards, fall detection): the probability that passengers may be injured is assumed as the combination of the presence of hazards and an alarm indicating whether a passenger has fallen or not.
- Individual status (movement efficiency, potential for injuries): medium movement efficiency combined with medium potential for injuries leads to a delayed movement of the passenger towards the muster station. In the case of low movement efficiency and/or the presence of hazards, it is assumed that assistance by the crew will be required. Moreover, the potential of injuries is considered more critical compared to movement efficiency.
- Passenger flow in an area: The flow of the passengers in the vessel area under examination relates to the individual status of every passenger located in that area. The aggregation of all the individual status indices in the specific area provides the basis for the CPT of the node “Passenger flow on area”.
- Escape routes status (congestion, blockage): congestion is assumed to be more critical than blockage due to the fact that crew members expect that congestion issues will occur during the mustering stage of the evacuation process.
- Status of supporting systems: to assess the status of supporting systems for the mustering process, the following nodes were considered: the status of the public announcement (PA) system, the status of the wayfinding system, and the presence of crewmembers.
- Risk of delay (escape routes status, availability of muster Station, status of supporting systems): The risk of delay for each deck of every MVZ is calculated through the combination of these three nodes. The most critical is assumed to be the status of the escape routes.
- Group performance (individual status, congestion, deck distance from muster station): The group performance is referred to as the summary of the individual status of the passengers in every deck of every MVZ of the vessel. Therefore, the most critical node is considered to be the aggregation of the individual status, followed by the distance from muster station in terms of decks and then the presence of congestion.
- Mustering status (group performance, risk of delay): The main priority on cruise ships and Ro-Pax ferries during emergencies is the protection of life for the people onboard them; therefore, the passengers’ group performance is considered to be a more significant node compared to the risk of delay.
8.3. Pre-Abandonment Model
- Spreading (effectiveness of mitigation measures onsite, status of passive containment)
- Hull status (stability, structural integrity)
- Ability to navigate (propulsion system status, steering system status, navigational systems status)
- Vessel status (spreading, hull status, ability to navigate)
- Status of external assistance (proximity of another vessel for assistance, availability of search and rescue—SAR—vessels): According to the requirements of the SAR convention, nearby vessels are required to provide assistance to any vessel in distress, and SAR vessels are required to respond to distress calls. Therefore, the influence of these parent nodes is considered to be equal with respect to their influence on whether external assistance is expected or delayed. This means that assistance is considered equally likely regardless of whether it comes from SAR or other nearby vessels.
- Vulnerability after abandonment (status of external assistance, distance from shore, expected weather conditions): The probability of external intervention (i.e., SAR or other nearby vessels) arriving immediately and the distance from the shore affect the duration of people’s exposure to environmental hazards once they have abandoned the vessel on the MEVs. The adversity of the expected weather conditions affects the magnitude of the potential consequences to the people after the abandonment in terms of: (1) whether the integrity and floatability of the MEVs could be compromised, putting the people on the MEV at risk, and (2) for people stranded to sea, whether they are exposed to conditions that have an immediate danger to their health and safety (e.g., very low water temperatures). The effect of the expected weather conditions on people’s vulnerability after the abandonment was assigned a higher weight compared to the other two factors considering the higher possibility of immediate adverse effects compared to delayed external assistance.
- MEV launching status (maximum roll angle_MEV, MEV availability): The maximum roll angle of the ship required for the MEV launching mechanism to operate as expected might result in an inability to launch the MEVs and render the abandonment process unfeasible. The same result can be obtained if the MEVs have been damaged by the incident (e.g., a fire) or if people cannot safely approach them for boarding, regardless of the status of the launching mechanism. Therefore, the effect of these factors on whether the MEV can be launched is considered to be equal.
- Abandonment readiness (MEV launching status, Pax at muster stations): The percentage of people assembled at the muster stations plays a crucial role in the master’s decision to order the abandonment of the vessel. Therefore, this risk factor was attributed a higher weight compared to the effect of the MEV’s launching status to the abandonment readiness. Whether people are unable to board the MEVs or if the MEVs cannot be launched will also render the abandonment unfeasible. However, comparatively, it is considered to contribute less to the master’s decision.
- Urgency for abandonment (vessel status, vulnerability after abandonment, abandonment readiness): The weights assigned to the contributors to the urgency for abandonment are considered in the following order of importance (from higher to lower): (1) vessel status, (2) abandonment readiness, and (3) vulnerability after abandonment. During an evacuation, the main objective is to protect the health and safety of the people on board. Therefore, whether the vessel status directly and immediately endangers the people on board has the greatest effect on the master’s decision to abandon. When a vessel is relatively safe, the master’s priority is to complete the mustering process and be ready for abandonment considering the potential development of the vessel’s safety. Vulnerability after abandonment plays a role mainly in the case where the vessel is relatively safe. In the case of an unsafe vessel, the priority is to abandon the vessel independently from the expected weather conditions and other hazards that are related with the vulnerability after abandonment.
9. Validation
- Nomological validity to establish that the problem examined fits into a wider domain in the literature.
- Face validity to determine whether the relationships between the random variables reflect the problem.
- Content validity to establish that all important parameters that affect the problem have been included in the model.
- Convergent validity to determine the similarity of the model in terms of structure to other models for similar purposes.
- Discriminant validity that reflects the degree to which the model is different compared to other models, and
- Predictive validity to establish that model behaviour and output is fit-for-purpose.
9.1. Situation Assessment Model
9.2. Mustering Assessment Model
9.3. Pre-Abandonment Model
10. Case Study—Fire Scenario
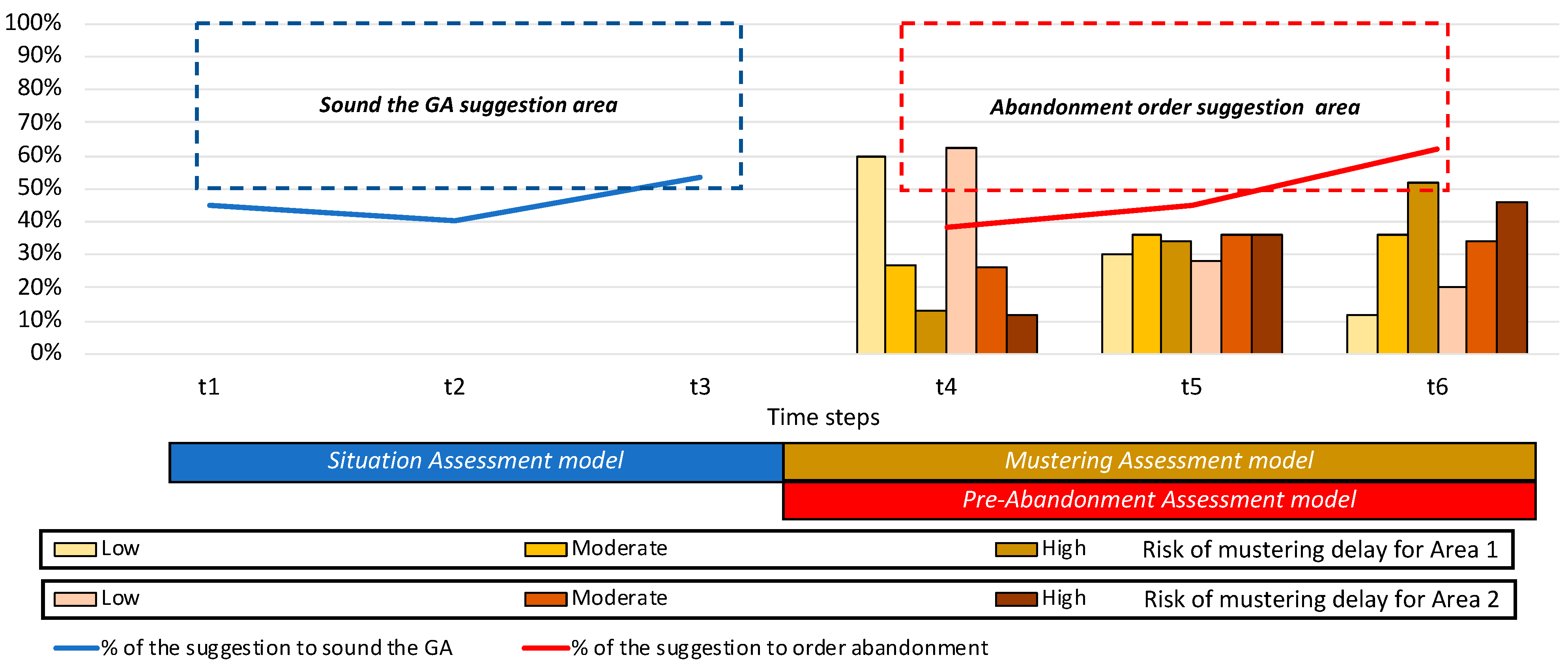
- The situation assessment model gives a suggestion to the Master on whether to sound the GA or not. The results are presented in percentages for two options, i.e., (a) sound the GA, or (b) do not sound the GA, so the master takes into account the suggestion with the higher percentage. If the “sound the GA” percentage exceeds 50%, the model suggests the initiation of the mustering process.
- The mustering assessment model result is the percentage of the risk of delay per specific area of the ship, so the results are presented with percentages on whether the risk of delay is at a (a) low, (b) moderate, or (c) high level.
- The pre-abandonment model gives a suggestion to the master on whether to order the abandonment of the vessel or not. The results are presented in percentages for two options, i.e., (a) order the abandonment, or (b) do not order the abandonment, so the master takes into account the suggestion with the higher percentage. If the “Order abandonment” percentage exceeds 50%, the model suggests the abandonment of the vessel.
10.1. Situation Assessment Model
10.2. Mustering Assessment Model
10.3. Pre-Abandonment Model
11. Results and Discussion
12. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | States | Description and Assumptions |
|---|---|---|
| Passenger speed | As expected Below expected Immobilized | Each state corresponds to a range of % deviation of the achieved walking speed of each passenger from the nominal one. Each passenger is assigned in a population category according to IMO MSC Circ. 1553 [32]. For each category, an expected walking speed is defined based on the type of terrain (corridor/staircase). |
| Presence of hazards | Smoke, toxic gas Fire Water No hazard | Indicates the presence of these hazards within the vicinity of the passenger location (impair the visibility of exit signs, reduce the walking speed due to a lack of oxygen, or the presence of water). It is assumed that hazards are present when a passenger is located within the coverage area of an activated sensor (e.g., a smoke detector). |
| O2 saturation | Normal Critical Dangerous | Indicates the probability of a person being able to move based on the O2 saturation in his/her blood. It is assumed that there are three levels of criticality based on the O2 saturation. Normal: more than 90%, critical: between 80% and 90%, dangerous: below 80% [33]. |
| Movement efficiency | Low Medium High | The likelihood of an individual passenger’s movement being efficient in terms of individual safety, walking speed, and O2 saturation. The lower the walking speed deviation from the expected values, the higher the efficiency. The presence of hazards reduces the movement efficiency. A low movement efficiency contributes to potential delays. Low levels of O2 saturation indicate difficulties in movement. |
| Heart rate | Normal Panic | Heart rate is used as an indicator of stress. In particular, a higher heart rate than a specific threshold may indicate extreme stress (i.e., fight or flight zone). For each passenger group, a normal heart rate range is determined from the relevant literature based on the age of the passenger [34]. |
| Fall detection | Yes No | Indicates whether a passenger has fallen. If the respective alarm is activated, then it is assumed that the passenger has an increased probability to suffer an injury, leading to a delayed arrival at the muster station. |
| Potential for injuries | Low Medium High | Hazards in the vicinity of the passenger location, deviations from normal heart rate values, and the activation of the fall detection alarm increase the likelihood that a passenger has been injured. |
| Individual status | Assistance required Movement delayed Free movement | Likelihood of individual passengers requiring assistance for getting to the muster station and/or medical assistance. Individual status is inferred for each passenger separately and provides the input to the group status node in statistical terms. It is assumed that a passenger needs crew assistance when they move through hazardous areas, their speed is lower than expected, and their heart rate is abnormal. |
| Passenger flow in area | Normal Delayed Disrupted | The probability that the flow of passengers in an area is normal, delayed, or disrupted based on the percentage of the individual status of them in the area. |
| Deck distance from muster station | Long Moderate Short | Acts as a measure of the duration of exposure to a hazardous environment. It is assumed that the longer the distance to be covered, the higher the direct exposure to hazards and the higher the impact from the conditions during the mustering process, such as anxiety, falls, and panic. |
| Group performance | Low Medium High | An assessment of the passenger group performance is correlated with the performance of the mustering process in terms of delays and passenger exposure to hazards, as well as the distance of the group from the muster station. In addition, group performance is considered to be a function of individual status. |
| Congestion | Low Moderate High | Congested areas in critical locations (e.g., exits, staircases) affect the performance of the group (e.g., disordering, anxiety, and the incurrence of injuries such as trampling). According to IMO MSC.1/Circ. 1533 [35], congestion occurs when the ratio of the number of passengers/square meter exceeds a value of 3.5. |
| Blockage | Yes No | Indicates the availability of exits or part of a route on ship deck X due to the presence of a hazard that results in the accessibility of the exits/route. There is a direct effect on the delay of the mustering process, as passengers will need to be re-directed to other evacuation route(s). It is assumed that the presence of a hazard and/or an incident on a deck blocks the corresponding evacuation route(s). |
| Availability of muster station | Accessible Not accessible | If a muster station of an MVZ is not accessible, this will possibly increase the time needed to arrive at alternative muster stations and, thus, increase the required time for completing the mustering process. A muster station may not be available or accessible due to hazardous conditions within its area or in case it cannot be used as an access point for the MEVs (e.g., fire on the deck outside the muster station). |
| Escape routes status | Opened Disrupted Closed | Escape routes are considered to be open when the likelihood of congestion is low and there are no blockages, they are considered to be disrupted when there is the existence of either congestion or blockages, and they are considered to be closed when passengers need to be redirected to alternative routes. |
| Status of PA system | Operational Not operational | It is assumed that if the PA system is operational, the crew know how to use it and will use it appropriately for the specific situation. |
| Status of wayfinding system | Operational Not operational | Indicates whether the wayfinding system is operational for supporting passengers with reaching their assigned muster station. The ship’s wayfinding system for evacuation includes low lights and exit signs that provide the necessary signage to follow through an escape route to the assigned or nearest muster station. This equipment is vital for the effectiveness of the mustering process, especially when visibility is low or when lights are not working (e.g., in the case of a blackout). It is assumed that the ship’s wayfinding system complies with SOLAS II-2/Reg. 13 [36]. |
| Presence of crew members | Present Absent | Indicates whether crew members in an area under examination are present to assist and guide the passengers. Crew members provide guidance and assistance to passengers during the mustering process; thus, their absence will result in delays to the mustering process. In the context of this node it is assumed that crew members will be at their designated positions, according to the ship’s emergency procedures, and that they will carry out their duties as intended. |
| Status of supporting systems | Operational Degraded Not operational | The likelihood that the systems that support the mustering process are operational based on the status of the PA and wayfinding systems and the presence of the crew. If supporting systems are not fully operational, then the likelihood that the mustering process will be delayed is increased. Supporting systems are operational if the PA and wayfinding systems are operational and crew members are at their designated places, they are degraded if any one of the above are not operational, and they are not operational if all of the above are not operational. |
| Risk of delay | Low Medium High | Represents the probability of a risk of delay for the specific area of the vessel depending on the status of escape routes and supporting systems, as well as the performance of the passengers in the area. A high risk of delay implies that immediate actions need to be taken to assist passengers and to restore passenger flow towards the muster stations. A medium risk implies there are specific areas where the mustering process could be delayed, and therefore special attention is required for this area. A low risk of delay indicates that the mustering process is developing smoothly, but continuous monitoring is required. |
| Node | States | Description and Assumptions |
|---|---|---|
| Proximity of other vessels for assistance | Low Moderate High | Indicates the possibility of other vessels providing assistance with respect to rescuing passengers abandoning the vessel with lifeboats. The proximity of other vessels depends on the frequency of maritime traffic in the area. Vessels in the vicinity respond to distress calls as per the requirements of the SAR convention. A high proximity may decrease the amount of time that the passengers are exposed to environmental hazards after the abandonment. |
| Availability of SAR vessels | On the way Delayed | Indicates whether a search and rescue (SAR) operation has commenced from the competent authorities after a distress signal has been sent. The time it takes for the SAR vessels to arrive at the scene depends on the distance from the nearest marine rescue centre and the prevailing weather and sea conditions. |
| Status of external assistance | Expected Delayed | Indicates whether assistance is expected once people have abandoned the ship on the lifeboats. This depends on the mobilization of a SAR operation and the distance to nearby vessels. External assistance is expected when at least some SAR vessels have been notified and are on the way and nearby vessels are close to the ship involved in the incident. |
| Distance from shore | Low Moderate High | Indicates whether passengers, after the abandonment, can reach the shore safely in a reasonable amount of time. If an incident happens near the shore, the passengers have a higher probability of getting rescued even in the worst-case scenarios (e.g., lifeboats are unavailable). |
| Expected weather conditions | Fair Moderate Harsh | Information about prevailing weather conditions is taken in the form of a 3 h forecast. Fair, moderate, and harsh characterizations are based on the following sea states, as described by ITTC 7.5-04-01-01.1 [37]: 0–3 (fair), 4–6 (moderate), greater than 7 (harsh). Harsh weather conditions increase the probability of adverse consequences to human safety. Extreme temperatures (low or high) can also affect passenger vulnerability. |
| Vulnerability after abandonment | Low Moderate High | This aspect relates to potential adverse consequences to passenger safety after being exposed to environmental hazards. This depends on how quickly they can be brought to safety, either at shore or on board another vessel, as well as on the prevailing weather conditions. Low levels of vulnerability are related to minimum exposure, either due to fair environmental conditions (independently from the time until SAR) or due to a quick SAR (independently from the prevailing conditions). |
| MEV availability | Yes No | Indicates whether MEVs are damaged, inaccessible, or unsafe to approach for the crew and passengers due to the incident. The MEVs are considered available if they have not suffered damages to an extent that their floatability and water tightness are affected and if they are safely accessible by the crew and passengers. |
| Maximum roll angle_MEV | Exceeded Not exceeded | Indicates whether safe limits for the maximum roll angle have been exceeded with respect to whether the launching system of the MEVs can operate as expected. The threshold values depend on the vessel and the MEVs’ characteristics. |
| MEV launching status | Able to launch Unable to launch | Indicates whether the launching system of the MEVs is expected to operate as intended, considering the operational constraints with respect to the ship’s maximum roll angle (i.e., the ship’s heel) and damages that the system may have suffered from the incident. The MEVs will be able to launch if they have not suffered any non-extensive damage either to their launching system or to their structure and at a maximum ship heel angle that at least complies with the requirements set by the LSA code Ch. IV-4.4 §4.4.1 [38]. |
| Pax at muster stations | Below 50% Between 50–80% Over 80% | Indicates the number of passengers that have arrived at muster stations as a percentage of the total number of passengers on board. All expected passengers must have arrived at muster stations in order to be able to order vessel abandonment and for the mustered passengers to start boarding the MEVs. The specific percentages can be treated as a parameter that reflects the attitude of the decision maker towards risk aversion. |
| Abandonment readiness | Low Moderate High | The level of abandonment readiness depends on the percentage of passengers at the muster stations that can start boarding the MEVs and on the capability of launching the MEVs. A high level of readiness implies that nearly all passengers have arrived at their designated muster station and can safely board the MEVs that can be launched. |
| Urgency for abandonment | Low Moderate High | An assessment of the pre-abandonment situation by considering the impact to passenger safety if they (1) remain on board at their designated muster stations, or (2) board the MEVs, evacuate the vessel, and wait for SAR. The assessment depends on the integrity of the vessel and the operational status of its subsystems given the incident and the degree to which it has been contained, the potential impact to human safety given an abandonment order, and the readiness to abandon. The decision alternatives for the master that are supported by the assessment are to delay and further evaluate the situation or immediately give the order to abandon the vessel. |
References
- Koimtzoglou, A.; Themelis, N.; Ventikos, N.P.; Louzis, K.; Koimtzoglou, M.; Giannakis, K.; Panagiotidis, P.; Moustogiannis, S.; Ramiro, M.; Peña, J.; et al. Assessing the Risk during Mustering in Large Passenger Vessels: A Digital Tool for Real Time Decision Support. In Sustainable Development and Innovations in Marine Technologies; CRC Press: Boca Raton, FL, USA, 2022; pp. 269–276. [Google Scholar] [CrossRef]
- Koimtzoglou, A.; Louzis, K.; Michelis, A.; Koimtzoglou, M. Mass evacuation of large passenger ships: A state-of-the-art analysis- setting the foundations for the intelligent evacuation ecosystem Palaemon. In Proceedings of the Hellenic Institute of Marine Technology Annual Conference of Marine Technology, Athens, Greece, 2 December 2021; pp. 137–150. [Google Scholar]
- Liu, Z.; Li, Y.; Zhang, Z.; Yu, W. A New Evacuation Accessibility Analysis Approach Based on Spatial Information. Reliab. Eng. Syst. Saf. 2022, 222, 108395. [Google Scholar] [CrossRef]
- Yue, Y.; Gai, W.M.; Deng, Y.F. Influence factors on the passenger evacuation capacity of cruise ships: Model-ling and simulation of full-scale evacuation incorporating information dissemination. Process Saf. Environ. Protection 2022, 157, 466–483. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, H.; Xie, J.; Zhao, Q. Dynamic Evacuation Planning on Cruise Ships Based on an Improved Ant Colony System (IACS). J. Mar. Sci. Eng. 2021, 9, 220. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Zhan, Y.; Deng, K.; Dong, L. Evacuation Strategy Considering Path Capacity and Risk Level for Cruise Ship. J. Mar. Sci. Eng. 2022, 10, 398. [Google Scholar] [CrossRef]
- Zhang, H.; Li, C.; Zhao, N.; Chen, B.-Q.; Ren, H.; Kang, J. Fire Risk Assessment in Engine Rooms Considering the Fire-Induced Domino Effects. J. Mar. Sci. Eng. 2022, 10, 1685. [Google Scholar] [CrossRef]
- Eleye-Datubo, A.G.; Wall, A.; Saajedi, A.; Wang, J. Enabling a Powerful Marine and Offshore Decision-Support Solution Through Bayesian Network Technique. Risk Anal. 2006, 26, 695–721. [Google Scholar] [CrossRef] [PubMed]
- Sarshar, P.; Granmo, O.-C.; Radianti, J.; Gonzalez, J.J. A Bayesian Network Model for Evacuation Time Analysis during a Ship Fire. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence in Dynamic and Uncertain Environments (CIDUE), Singapore, 6–19 April 2013; pp. 100–107. [Google Scholar] [CrossRef]
- Sarshar, P.; Radianti, J.; Gonzalez, J.J. Modeling Panic in Ship Fire Evacuation Using Dynamic Bayesian Network. In Proceedings of the Third International Conference on Innovative Computing Technology (INTECH 2013), London, UK, 29–31 August 2013; pp. 301–307. [Google Scholar] [CrossRef]
- Sarshar, P.; Radianti, J.; Granmo, O.-C.; Gonzalez, J.J. A Dynamic Bayesian Network Model for Predicting Congestion During a Ship Fire Evacuation, In Proceedings of the Name of the World Congress on Engineering and Computer Science (WCECS), San Francisco, CA, USA, 23–25 October 2013.
- Lazreg, M.B.; Radianti, J.; Granmo, O.C. SmartRescue: Architecture for Fire Crisis Assessment and Prediction. In Proceedings of the ISCRAM Conference, Kristiansand, Norway, 24–27 May 2015. [Google Scholar]
- International Maritime Organization (IMO). Interim Guidelines for Evacuation Analyses for New and Existing Passenger Ships- MSC.1/Circ. 1033; International Maritime Organization (IMO): London, UK, 2007. [Google Scholar]
- Ministry of Infrastructures and Transports. Fire on Board Ro-Ro Pax SORRENTO—28 April 2015—Interim Report, 3rd ed.; Ministry of Infrastructures and Transports: Rome, Italy, 2015.
- Accident Investigation Board Norway. Interim Report 12 November 2019 on the Investigation into the Loss of Propulsion and Near Grounding of Viking Sky, 23 March 2019; Accident Investigation Board Norway: Lillestrøm, Norway, 2019.
- National Transportation Safety Board. Marine Accident Brief—Engine Room Fire Aboard Cruise Ship Carnival Liberty; National Transportation Safety Board: Washington, DC, USA, 2017.
- Ministry of Infrastructures and Transports. Cruise Ship Costa Concordia Marine Casualty on January 13, 2012 Report on the Safety Technical Investigation; Ministry of Infrastructures and Transports: Rome, Italy, 2012.
- Transportation Safety Board of Canada. Marine Investigation Report M06W0052-Striking and Subsequent Sinking Passenger and Vehicle Ferry Queen of the North Gil Island, Wright Sound, British Columbia 22 March 2006; Transportation Safety Board of Canada: Gatineau, QC, Canada, 2008. [Google Scholar]
- Ventikos, N.P.; Themelis, N.; Louzis, K.; Koimtzoglou, A.; Michelis, A.; Koimtzoglou, M.; Ragab, A. Evaluating Risk during Evacuation of Large Passenger Ships: A Smart Risk Assessment Platform for Decision Support. In Trends in Maritime Technology and Engineering Volume 2; CRC Press: London, UK, 2022; pp. 283–294. ISBN 978-1-00-332028-9. [Google Scholar] [CrossRef]
- Jensen, F.V.; Nielsen, T.D. Bayesian Networks and Decision Graphs, 2nd ed.; Spinger: New York, NY, USA, 2007. [Google Scholar]
- Solberg, K.E.; Jensen, J.E.; Barane, E.; Hagen, S.; Kjøl, A.; Johansen, G.; Gudmestad, O.T. Time to Rescue for Different Paths to Survival Following a Marine Incident. J. Mar. Sci. Eng. 2020, 8, 997. [Google Scholar] [CrossRef]
- Pitchforth, J.; Mengersen, K. A Proposed Validation Framework for Expert Elicited Bayesian Networks. Expert Syst. Appl. 2013, 40, 162–167. [Google Scholar] [CrossRef]
- Ping, P.; Wang, K.; Kong, D.; Chen, G. Estimating Probability of Success of Escape, Evacuation, and Rescue (EER) on the Offshore Platform by Integrating Bayesian Network and Fuzzy AHP. J. Loss Prev. Process Ind. 2018, 54, 57–68. [Google Scholar] [CrossRef]
- DNV GL. BMVI Study on Safety Model for Life Saving Appliances—Closing Report and Recommendations; DNV GL: Oslo, Norway, 2019. [Google Scholar]
- Ji, J.; Ma, Z.; He, J.; Xu, Y.; Liu, Z. Research on Risk Evaluation and Dynamic Escape Path Planning Algorithm Based on Real-Time Spread of Ship Comprehensive Fire. J. Mar. Sci. Eng. 2020, 8, 602. [Google Scholar] [CrossRef]
- Koimtzoglou, A.; Themelis, N.; Ventikos, N.P.; Louzis, K.; Koimtzoglou. A dynamic risk model for assessing the risk of delay during mustering phase of a passenger ship evacuation process. Proc. Ins. Mech. Eng. Part M J. Eng. Marit. Environ. (JEME), 2023; submitted. [Google Scholar]
- Khakzad, N.; Khan, F.; Amyotte, P. Dynamic Risk Analysis Using Bow-Tie Approach. Reliab. Eng. Syst. Saf. 2012, 104, 36–44. [Google Scholar] [CrossRef]
- Zhang, G.; Thai, V.V.; Yuen, K.F.; Loh, H.S.; Zhou, Q. Addressing the Epistemic Uncertainty in Maritime Accidents Modelling Using Bayesian Network with Interval Probabilities. Saf. Sci. 2018, 102, 211–225. [Google Scholar] [CrossRef]
- Hänninen, M. Bayesian Networks for Maritime Traffic Accident Prevention: Benefits and Challenges. Accid. Anal. Prev. 2014, 73, 305–312. [Google Scholar] [CrossRef] [PubMed]
- Khakzad, N.; Khan, F.; Amyotte, P. Safety analysis in process facilities: Comparison of fault tree and Bayesian network approaches. Reliab. Eng. Syst. Saf. 2011, 96, 925–932. [Google Scholar] [CrossRef]
- Hamza, Z.; Abdallah, T. Mapping Fault Tree into Bayesian Network in safety analysis of process system. In Proceedings of the 2015 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). Shipboard Escape Route Signs and Emergency Equipment Location Markings—MSC.1/Circ. 1553; International Maritime Organization (IMO): London, UK, 2016. [Google Scholar]
- Schade, M. Oxygen Saturation: Normal Values & Measurement’, Cosinuss. Available online: https://www.cosinuss.com/en/measured-data/vital-signs/oxygen-saturation/ (accessed on 20 November 2022).
- Davis, M.; Eshelman, E.R.; McKay, M. The Relaxation and Stress Reduction Workbook, 6th ed.; New Harbinger Publications: Oakland, CA, USA, 2008. [Google Scholar]
- International Maritime Organization (IMO). Revised Guidelines on Evacuation Analysis for New and Existing Passenger Ships—MSC.1/Circ. 1533; International Maritime Organization (IMO): London, UK, 2016. [Google Scholar]
- International Maritime Organization (IMO). Summary of SOLAS Chapter II-2. Available online: https://www.imo.org/en/OurWork/Safety/Pages/summaryofsolaschapterii-2-default.aspx (accessed on 20 November 2022).
- International Towing Tank Conference (ITTC). Recommended Procedures and Guidelines, Preparation and Conduct of Speed/Power Trials 7.5-04-01-01.1; International Towing Tank Conference (ITTC): Zürich, Switzerland, 2014; Available online: https://ittc.info/media/4208/75-04-01-011.pdf. (accessed on 24 November 2022).
- International Maritime Organization (IMO). Life-Saving Appliances-LSA Code; International Maritime Organization (IMO): London, UK, 2017. [Google Scholar]







| Parent Node | t1 | t2 | t3 |
|---|---|---|---|
| Time of day | Day | Day | Day |
| Incident type | Fire | Fire | Fire |
| Incident location | ER | ER | ER |
| Response team onsite | Yes | Yes | Yes |
| Status of mitigation systems | Not activated | Activated | Activated |
| Status of adjacent detectors | Not activated | Not activated | Not activated |
| Status of containment doors | Closed | Closed | Closed |
| Global stresses | Not exceeded | Not exceeded | Not exceeded |
| Restoring capability (GZ/GM criteria) | Covered | Covered | Covered |
| Maximum roll angle | Not exceeded | Not exceeded | Not exceeded |
| Internal communication | Operational | Operational | Operational |
| External communication | Operational | Operational | Operational |
| Propulsion system | Operational | Operational | Operational |
| Steering system | Operational | Operational | Not operational |
| Navigational systems | Operational | Operational | Operational |
| Sound the GA | Yes: 45% No: 55% | Yes: 44% No: 56% | Yes: 54% No: 46% |
| Parent Node | t4 | t5 | t6 |
|---|---|---|---|
| Deck distance from muster station | Long | Long | Long |
| Accessibility of muster station | Accessible | Accessible | Accessible |
| Congestion | Low | Moderate | High |
| Blockage | No | No | No |
| Status of PA system | Operational | Operational | Operational |
| Status of wayfinding system | Operational | Operational | Operational |
| Presence of crew members | Yes | Yes | Yes |
| Passenger flow on area | 80% Normal 20% Delayed 0% Disrupted | 60% Normal 40% Delayed 0% Disrupted | 30% Normal 70% Delayed 0% Disrupted |
| Risk of Delay | Low: 60% Moderate: 27% High: 13% | Low: 30% Moderate: 36% High: 34% | Low: 12% Moderate: 36% High: 52% |
| Parent Node | t4 | t5 | t6 |
|---|---|---|---|
| Deck distance from muster station | Moderate | Moderate | Moderate |
| Accessibility of muster station | Accessible | Accessible | Accessible |
| Congestion | Low | Moderate | Moderate |
| Blockage | No | No | Yes |
| Status of PA system | Operational | Operational | Operational |
| Status of wayfinding system | Operational | Operational | Operational |
| Presence of crew members | Yes | Yes | Yes |
| Passenger flow on area | 80% Normal 20% Delayed 0% Disrupted | 50% Normal 35% Delayed 15% Disrupted | 30% Normal 70% Delayed 0% Disrupted |
| Risk of Delay | Low: 62% Moderate: 26% High: 12% | Low: 28% Moderate: 36% High: 36% | Low: 20% Moderate: 34% High: 46% |
| Parent Node | t4 | t5 | t6 |
|---|---|---|---|
| Status of mitigation systems | Activated | Activated | Activated |
| Response team(s) on site | Yes | Yes | Yes |
| Status of containment doors | Closed | Closed | Closed |
| Status of adjacent detectors | Not Activated | Activated | Activated |
| GZ-GM | Covered | Covered | Covered |
| Maximum roll angle | Not exceeded | Not exceeded | Not exceeded |
| Global stresses | Not exceeded | Not exceeded | Not exceeded |
| Propulsion system status | Operational | Not operational | Not operational |
| Steering system status | Not operational | Not operational | Not operational |
| Navigational system status | Operational | Operational | Operational |
| Proximity of other vessels for assistance | High | High | High |
| Availability of SAR vessels | On the way | On the way | On the way |
| Distance from shore | Moderate | Moderate | Moderate |
| Expected weather conditions | Fair | Fair | Fair |
| Pax at muster stations | Below 50% | Between 50–80% | Over 80% |
| Maximum roll angle_MEV | Not exceeded | Not exceeded | Not exceeded |
| MEV availability | Yes | Yes | Yes |
| Abandon Vessel | Yes: 38% No: 62% | Yes: 45% No: 55% | Yes: 62% No: 38% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ventikos, N.P.; Koimtzoglou, A.; Louzis, K.; Themelis, N.; Koimtzoglou, M.-A. A Smart Risk Assessment Tool for Decision Support during Ship Evacuation. J. Mar. Sci. Eng. 2023, 11, 1014. https://doi.org/10.3390/jmse11051014
Ventikos NP, Koimtzoglou A, Louzis K, Themelis N, Koimtzoglou M-A. A Smart Risk Assessment Tool for Decision Support during Ship Evacuation. Journal of Marine Science and Engineering. 2023; 11(5):1014. https://doi.org/10.3390/jmse11051014
Chicago/Turabian StyleVentikos, Nikolaos P., Alexandros Koimtzoglou, Konstantinos Louzis, Nikolaos Themelis, and Marios-Anestis Koimtzoglou. 2023. "A Smart Risk Assessment Tool for Decision Support during Ship Evacuation" Journal of Marine Science and Engineering 11, no. 5: 1014. https://doi.org/10.3390/jmse11051014
APA StyleVentikos, N. P., Koimtzoglou, A., Louzis, K., Themelis, N., & Koimtzoglou, M. -A. (2023). A Smart Risk Assessment Tool for Decision Support during Ship Evacuation. Journal of Marine Science and Engineering, 11(5), 1014. https://doi.org/10.3390/jmse11051014