
Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks

 , ,
, ,
Abstract
:1. Introduction
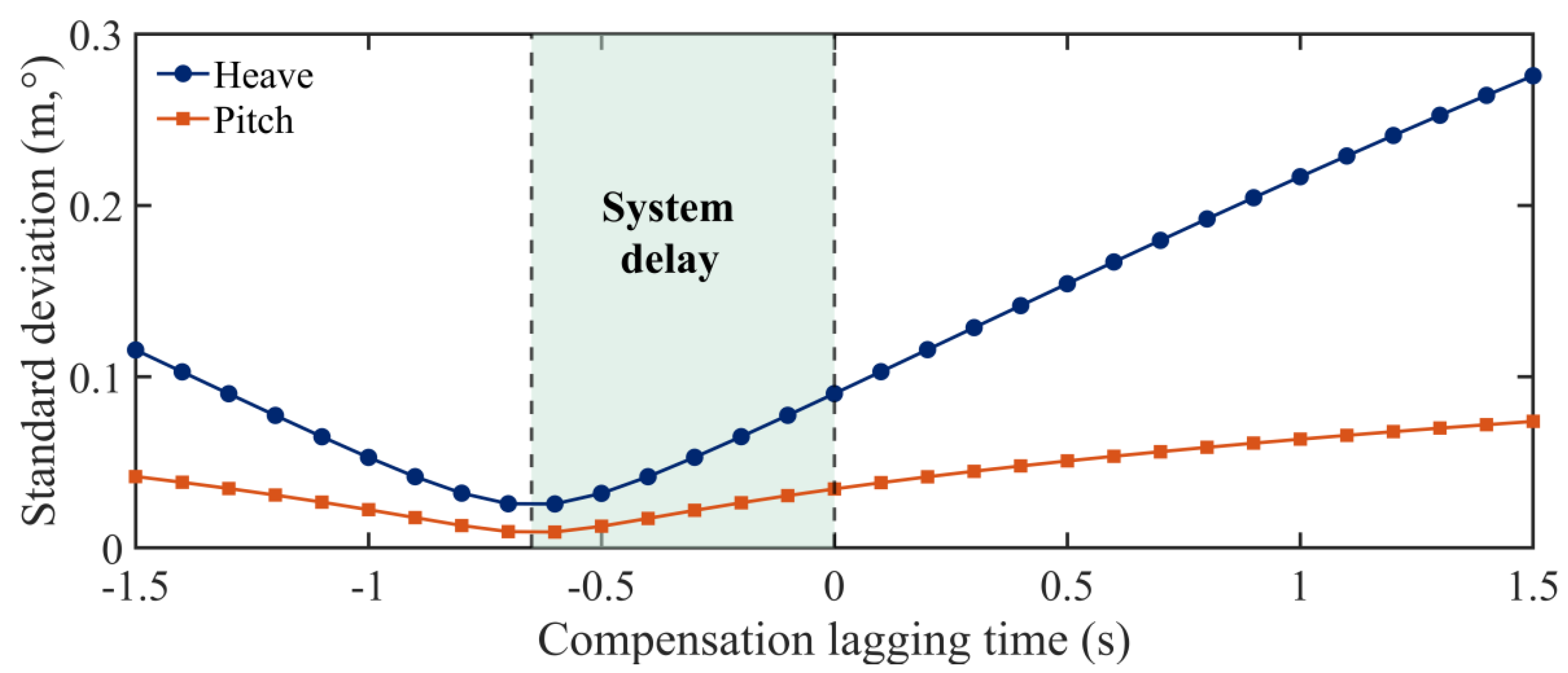
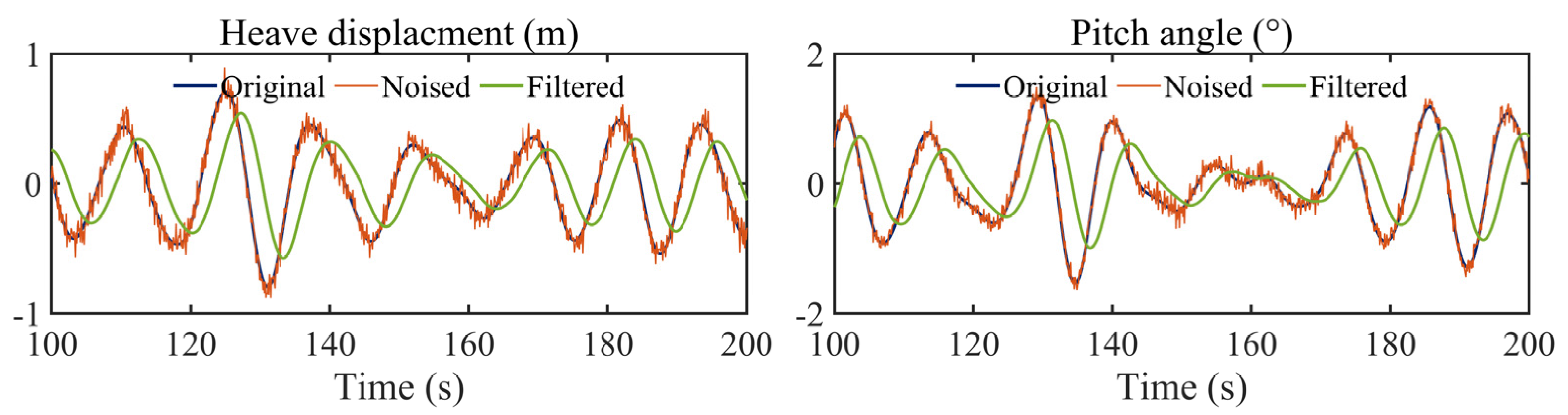
- The system delays introduced by the hydraulic SAHC system and the noise filtering system seriously affect the compensation of the SAHCs to the shipwreck motion;
- The delay introduced by noise filtering is commonly significant. In this study, the hydraulic control system alone has a delay of 0.6 s, which can reach more than 3 s when filtering is present;
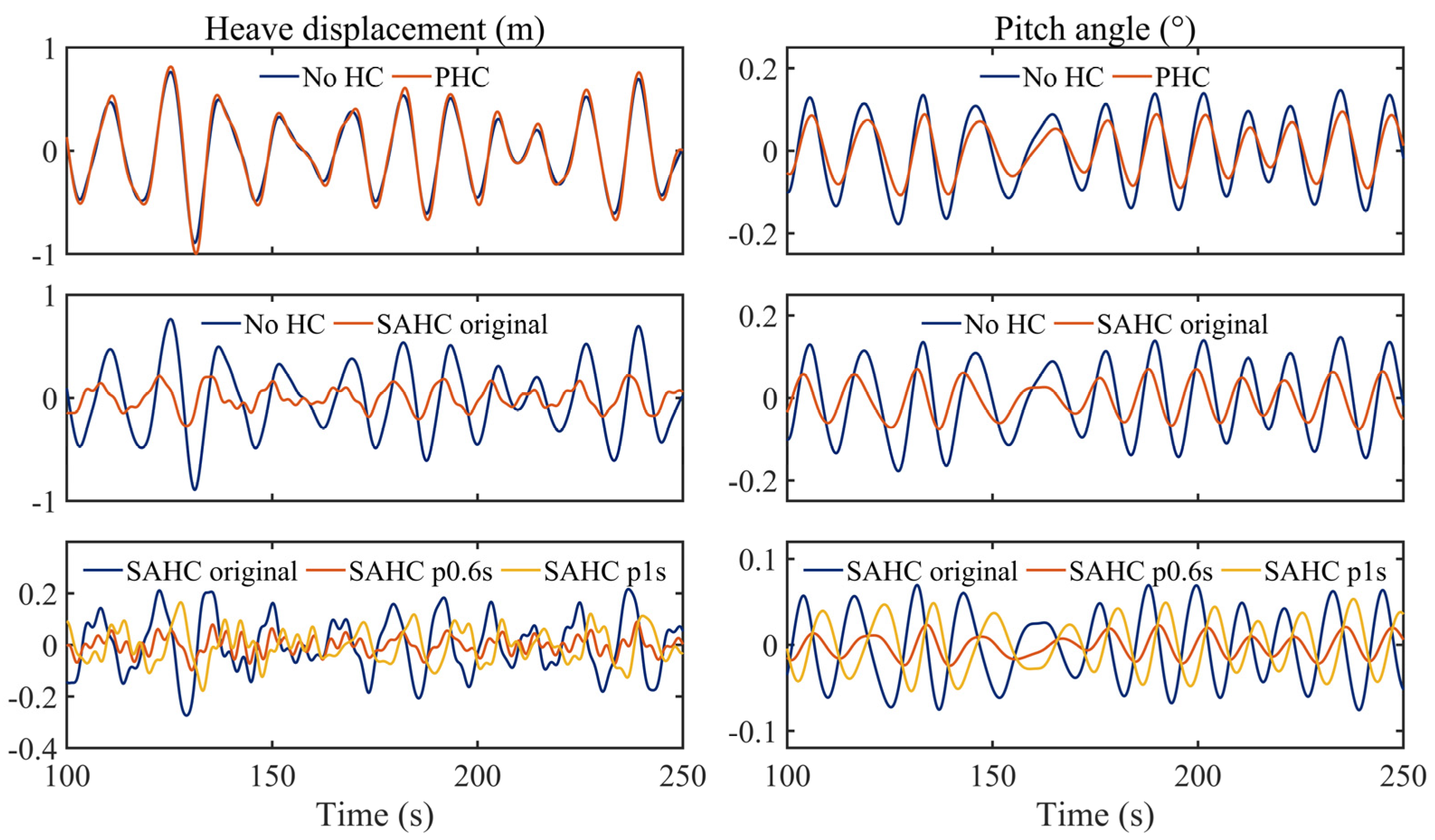
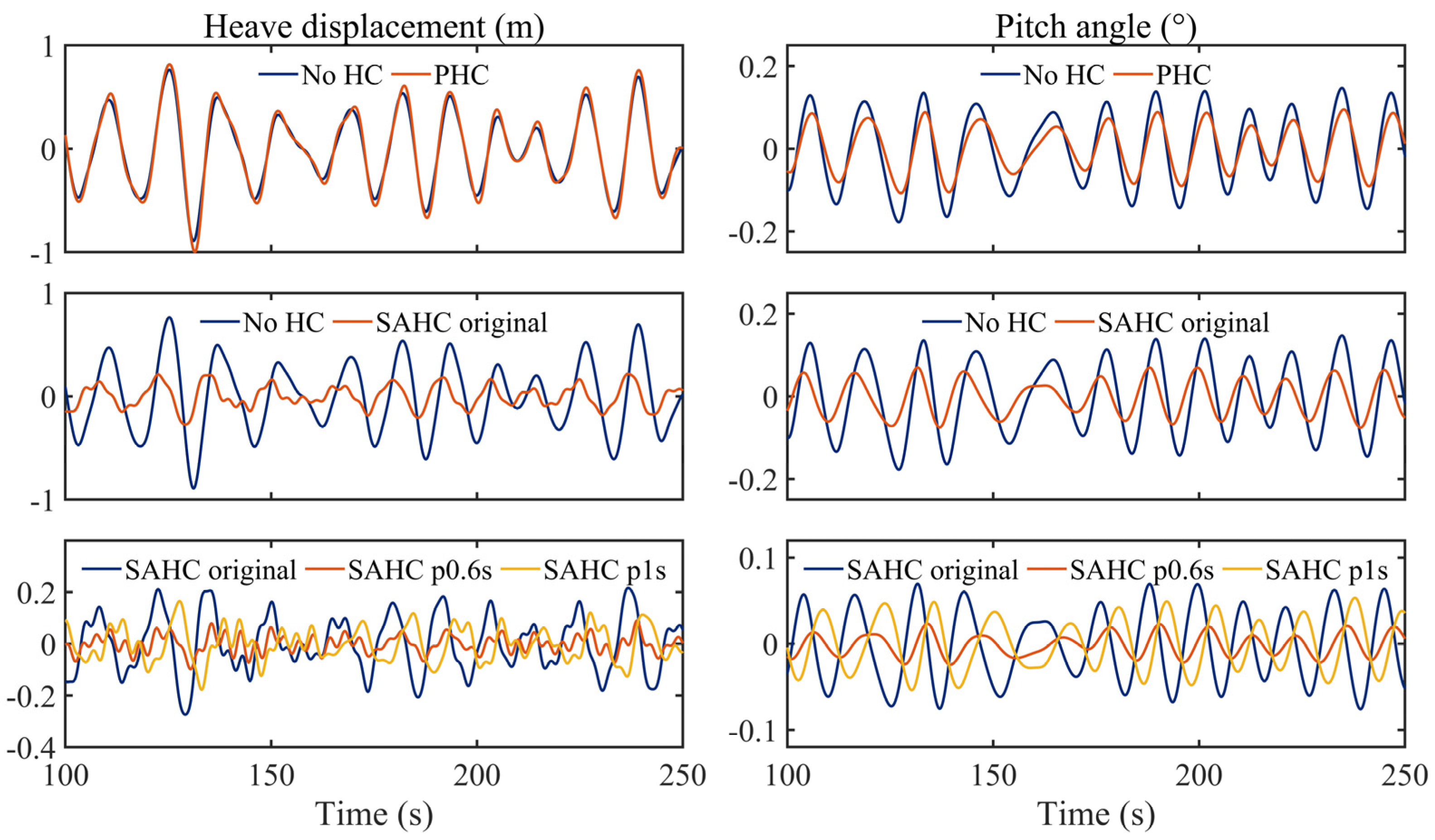
- When facing deep water, the effect of PHC is insignificant because the lifting slings are already sufficiently flexible. However, applying SAHC can effectively reduce the shipwreck’s motion;
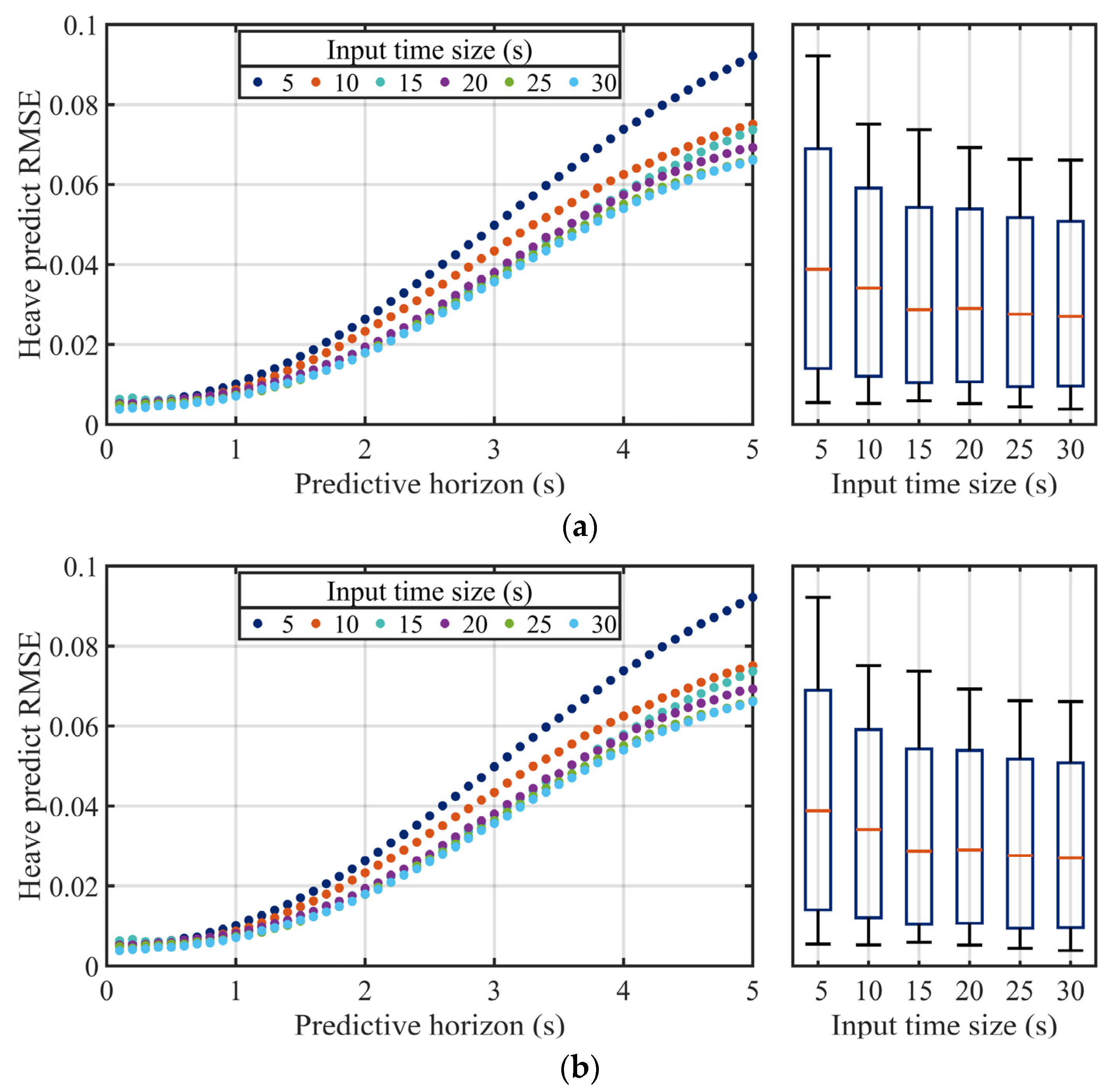
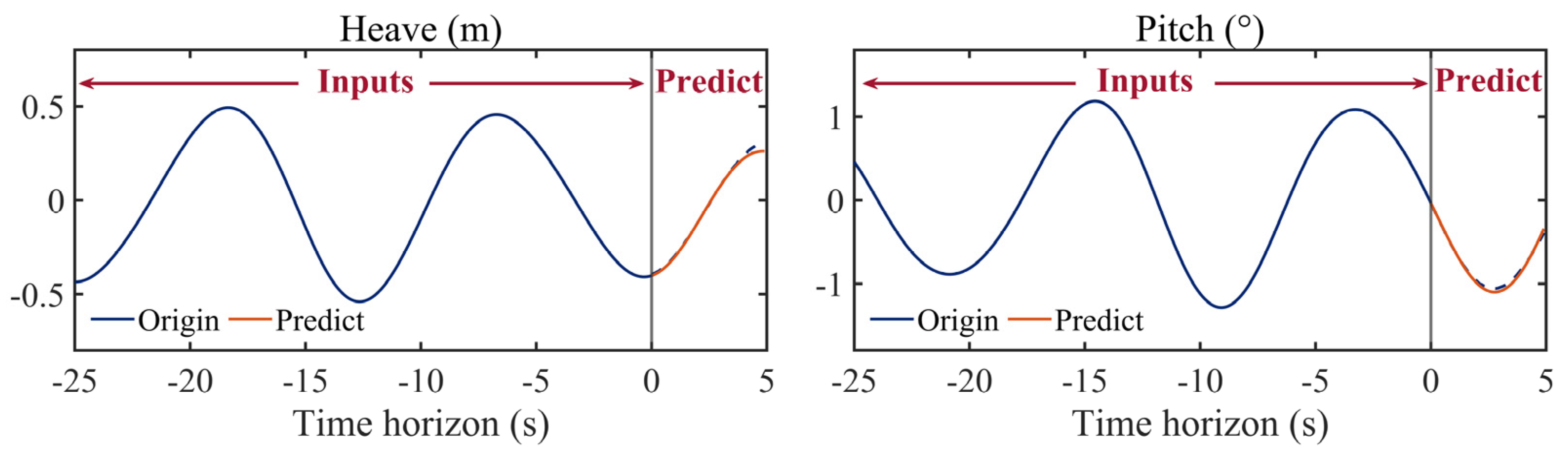
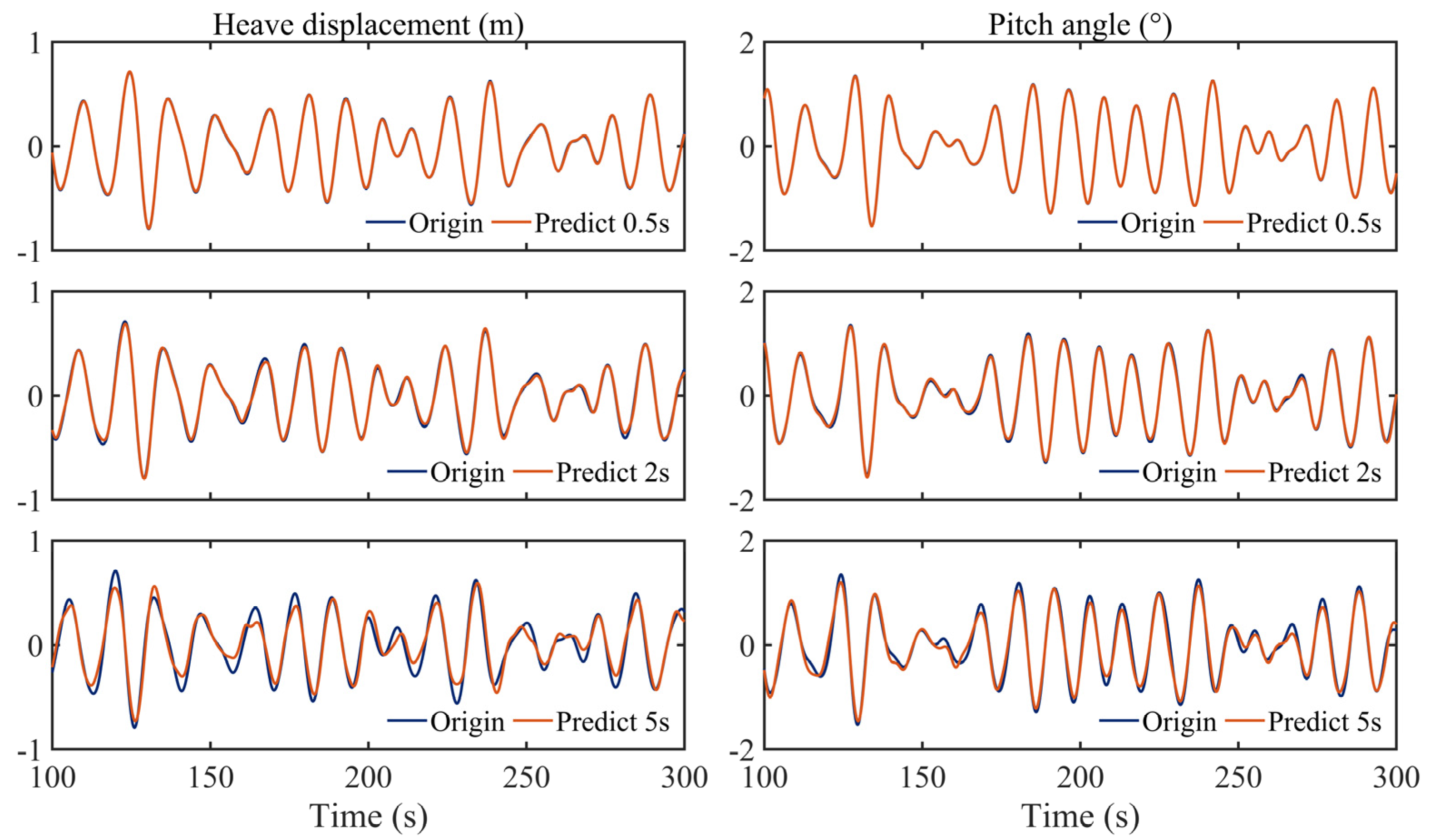
- The proposed LSTM-based neural network can effectively predict the heave and pitch motions of the barge 5 s into the future based on the historical data, which is sufficient for the compensation system;
- Motion prediction is necessary for systems lagged by noise filtering. SAHC without motion prediction is invalid when the noise exists.
2. System Modeling and Analysis
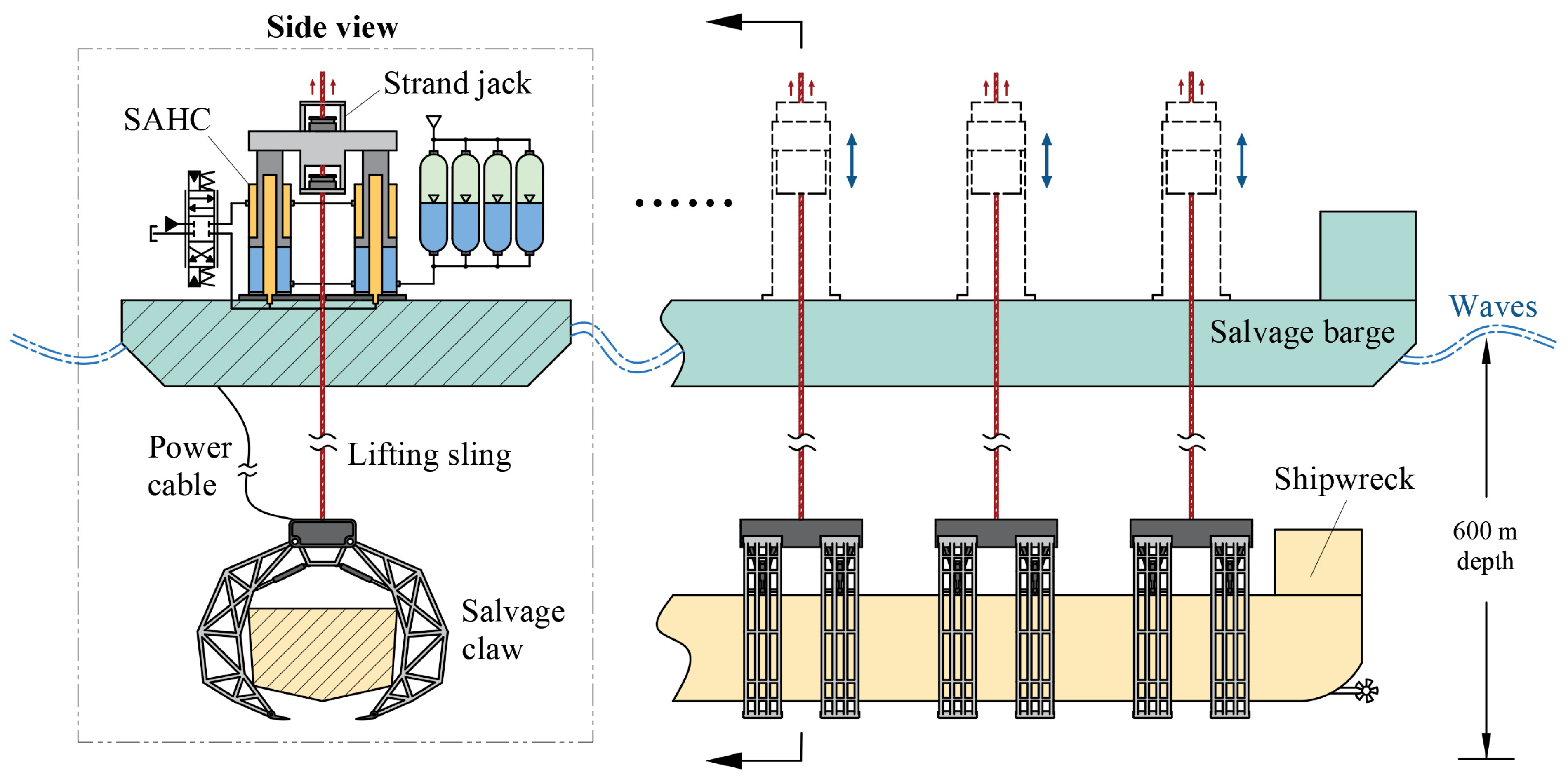
2.1. Claw Salvaging System
2.2. Mathematical Modeling
- Neglecting the dynamic effect of the shipwreck on the barge motion, since the barge has a larger inertia;
- Assuming the shipwreck approximates a cuboid;
- Considering the lifting sling as a linear spring model without banding and tilting;
- Ideal gas with isothermal compression in the accumulators;
- Only the heave and pitch motions are considered for both the barge and shipwreck.
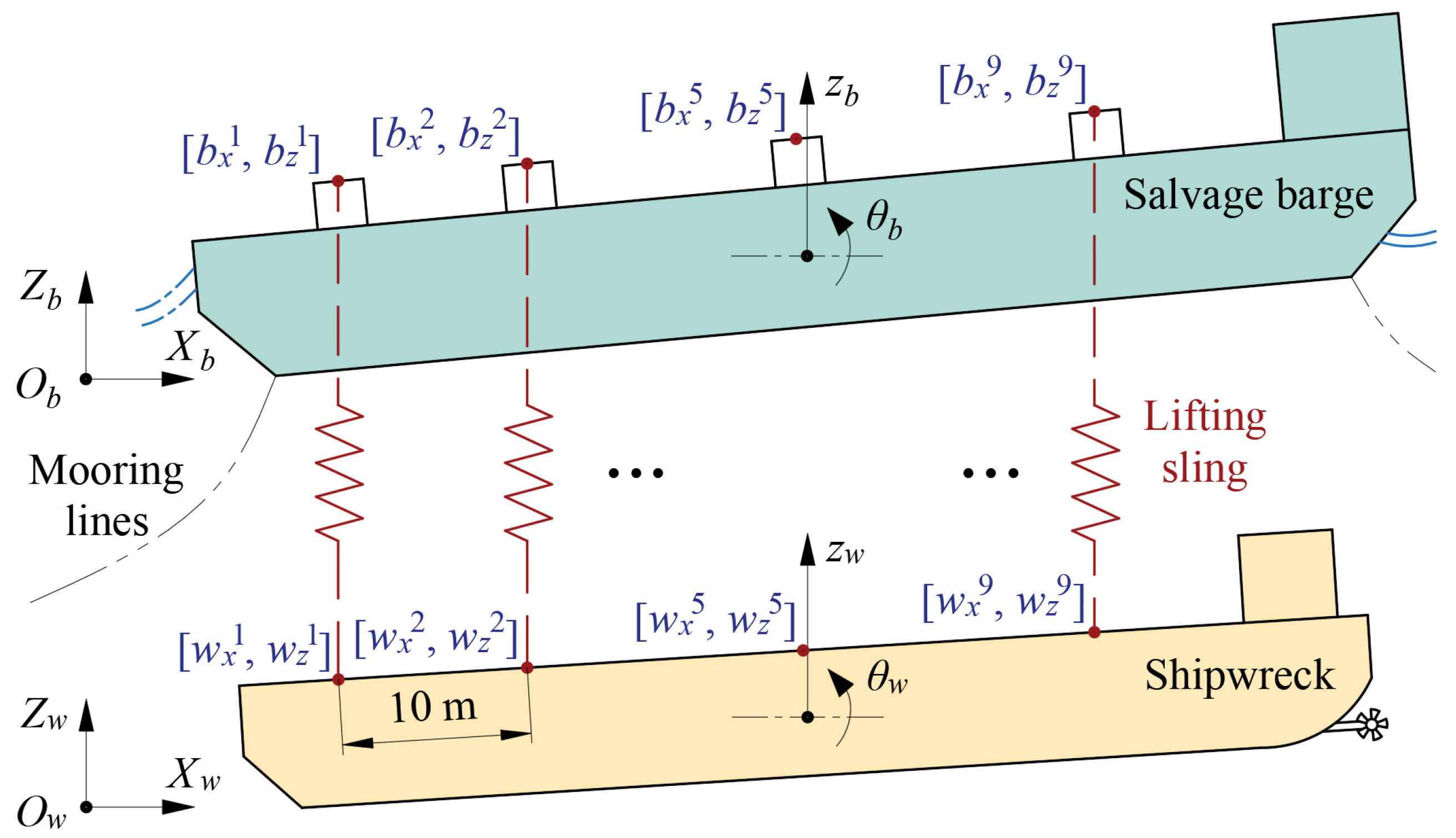
2.2.1. Barge–Shipwreck Motion Analysis
2.2.2. Lifting Sling Tensions
2.2.3. Shipwreck Heave and Pitch Dynamics
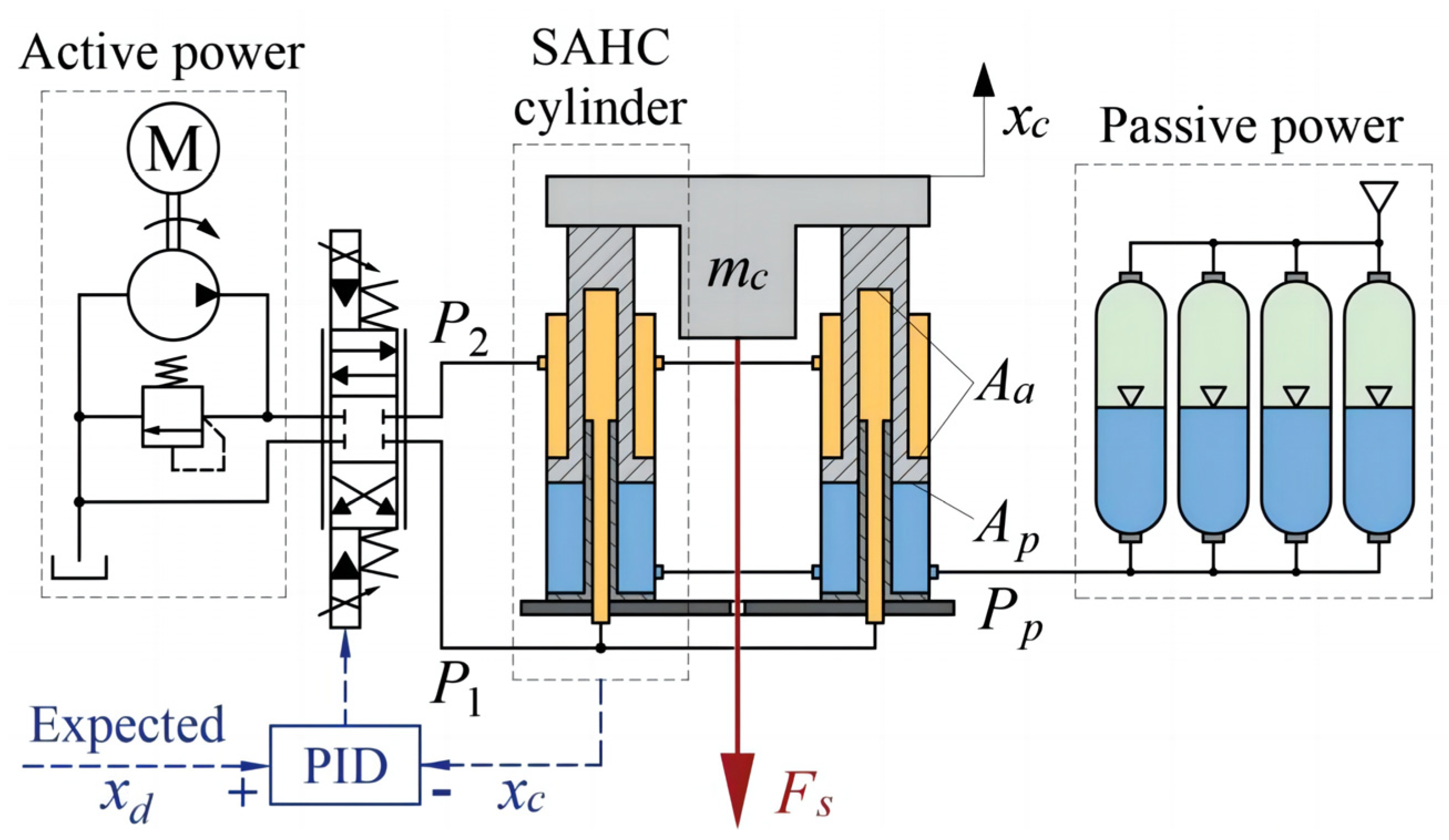
2.2.4. SAHC
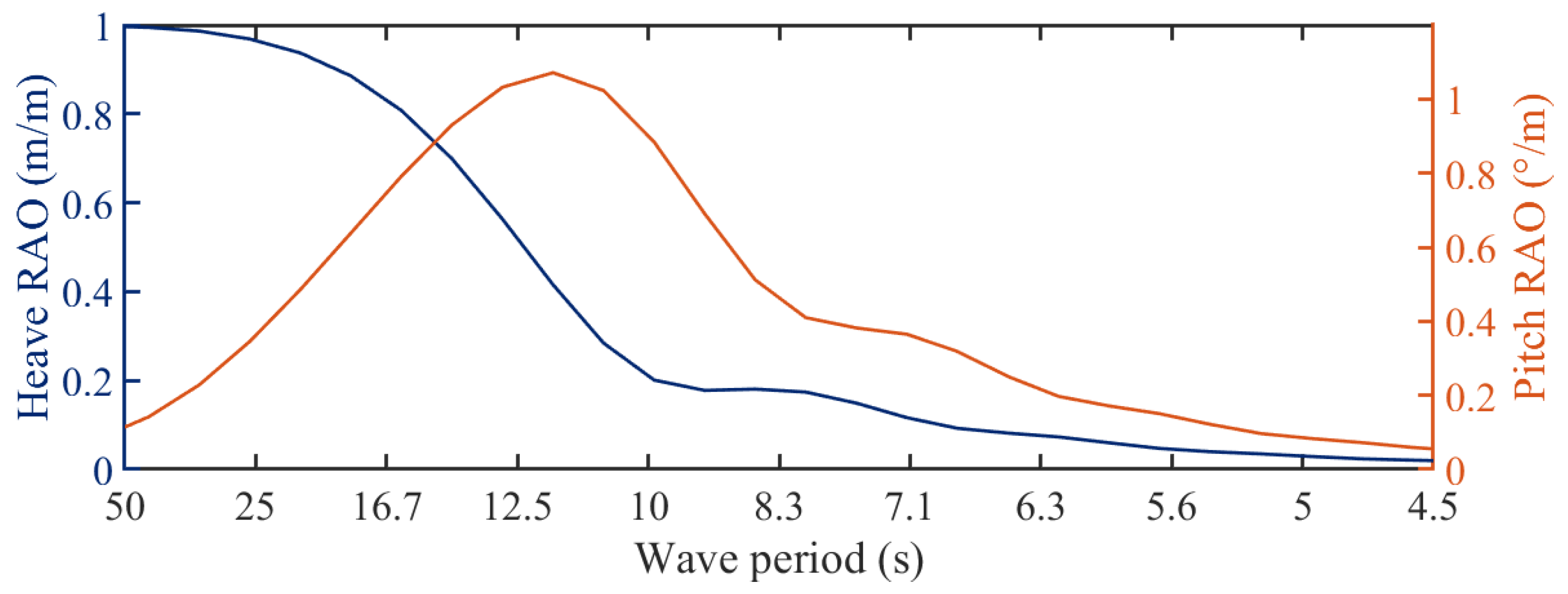
2.3. Barge Motion Hydrodynamic Analysis
3. LSTM-Based Barge Motion Prediction
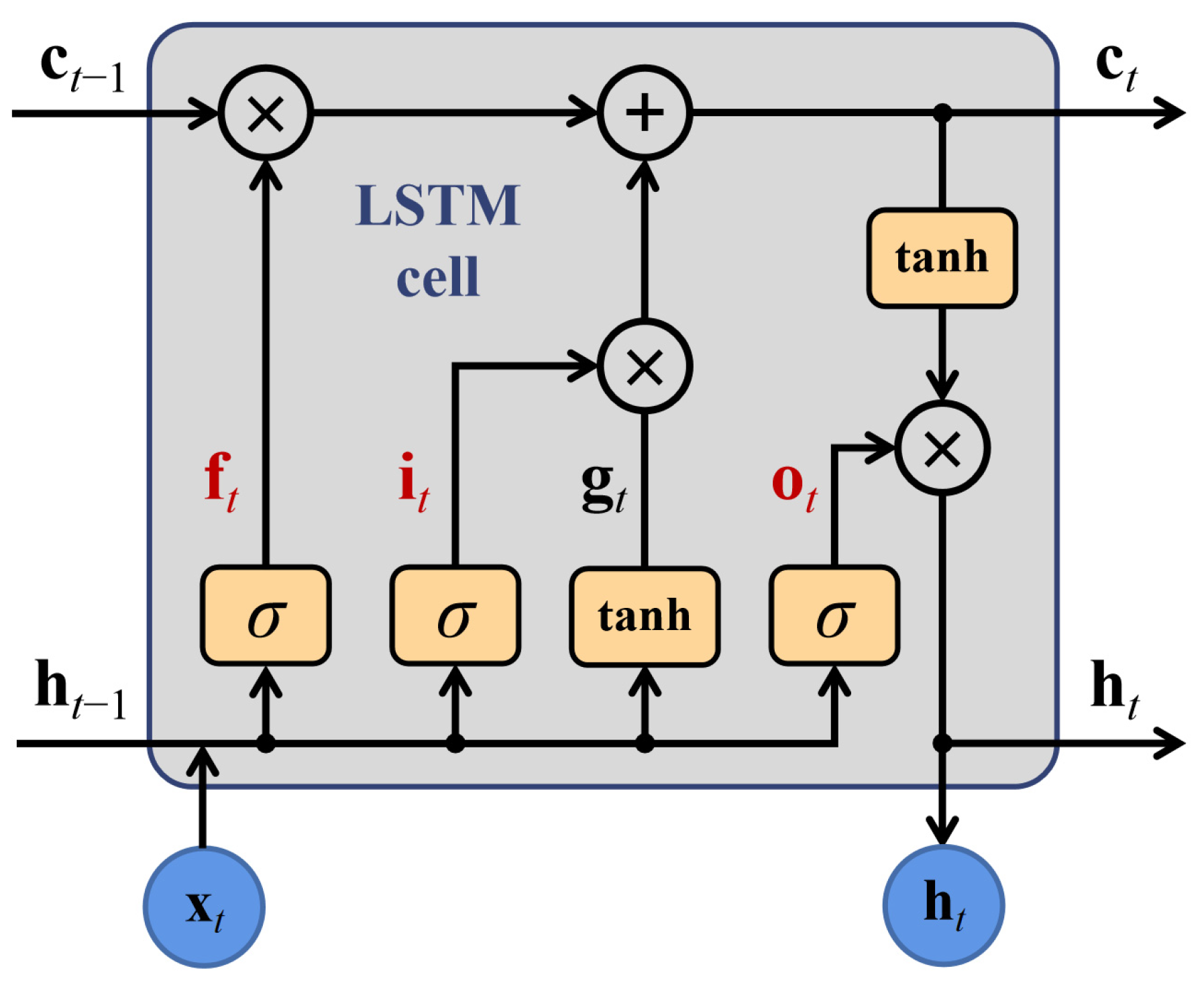
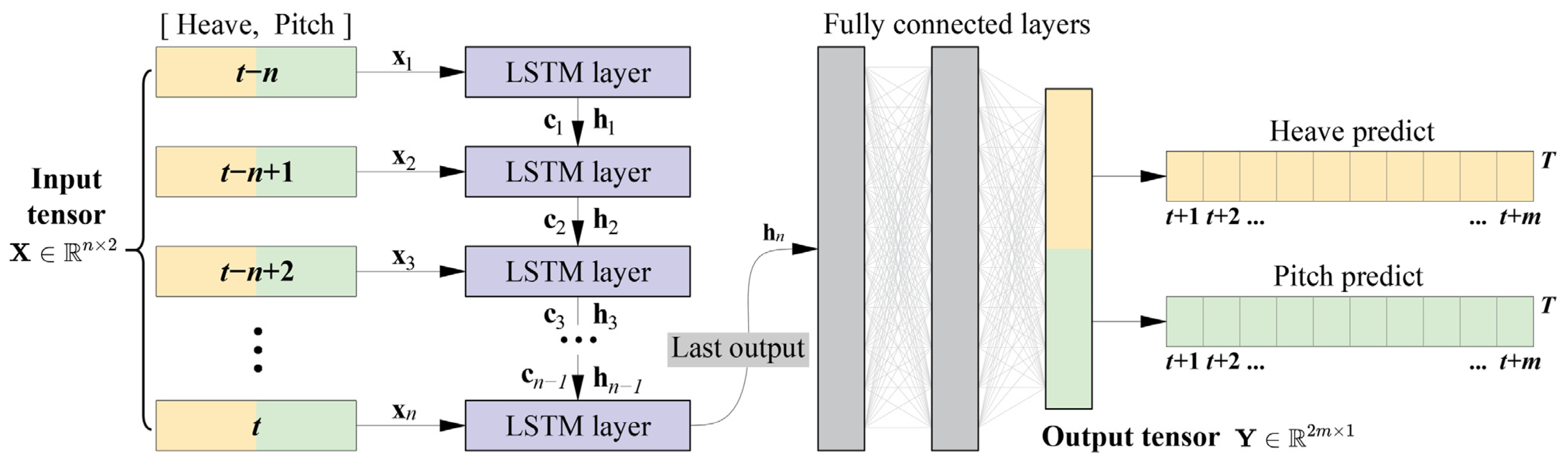
3.1. LSTM-Based Motion Predictive Neural Network
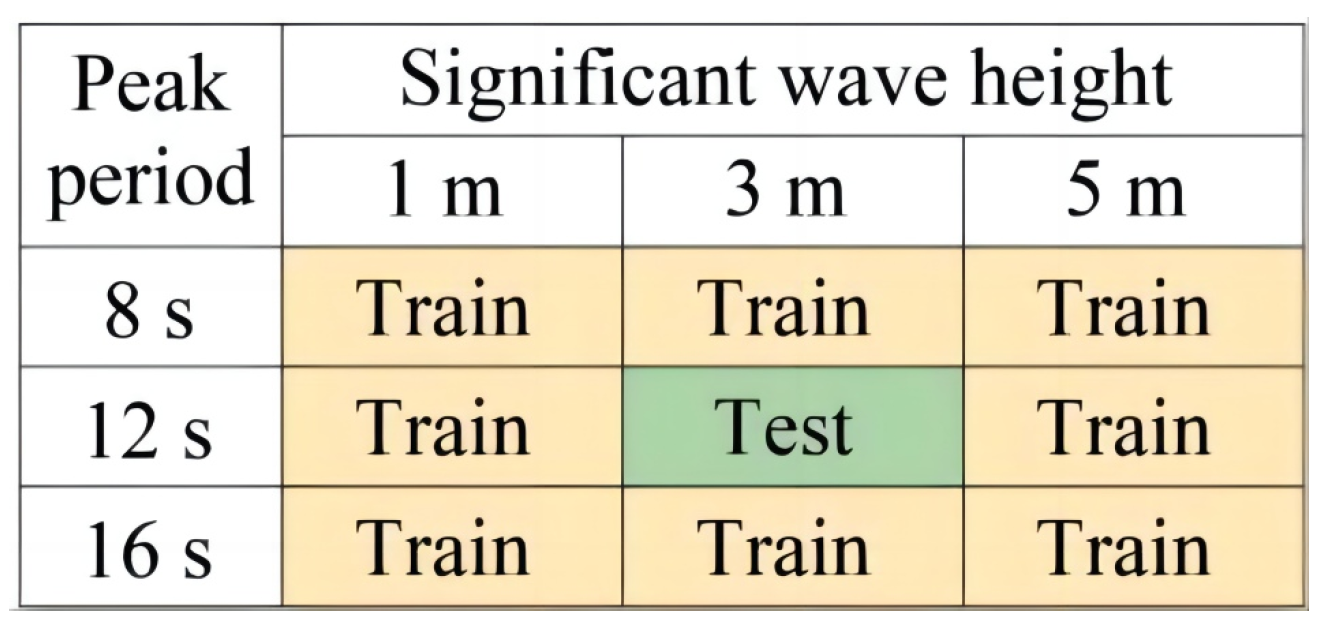
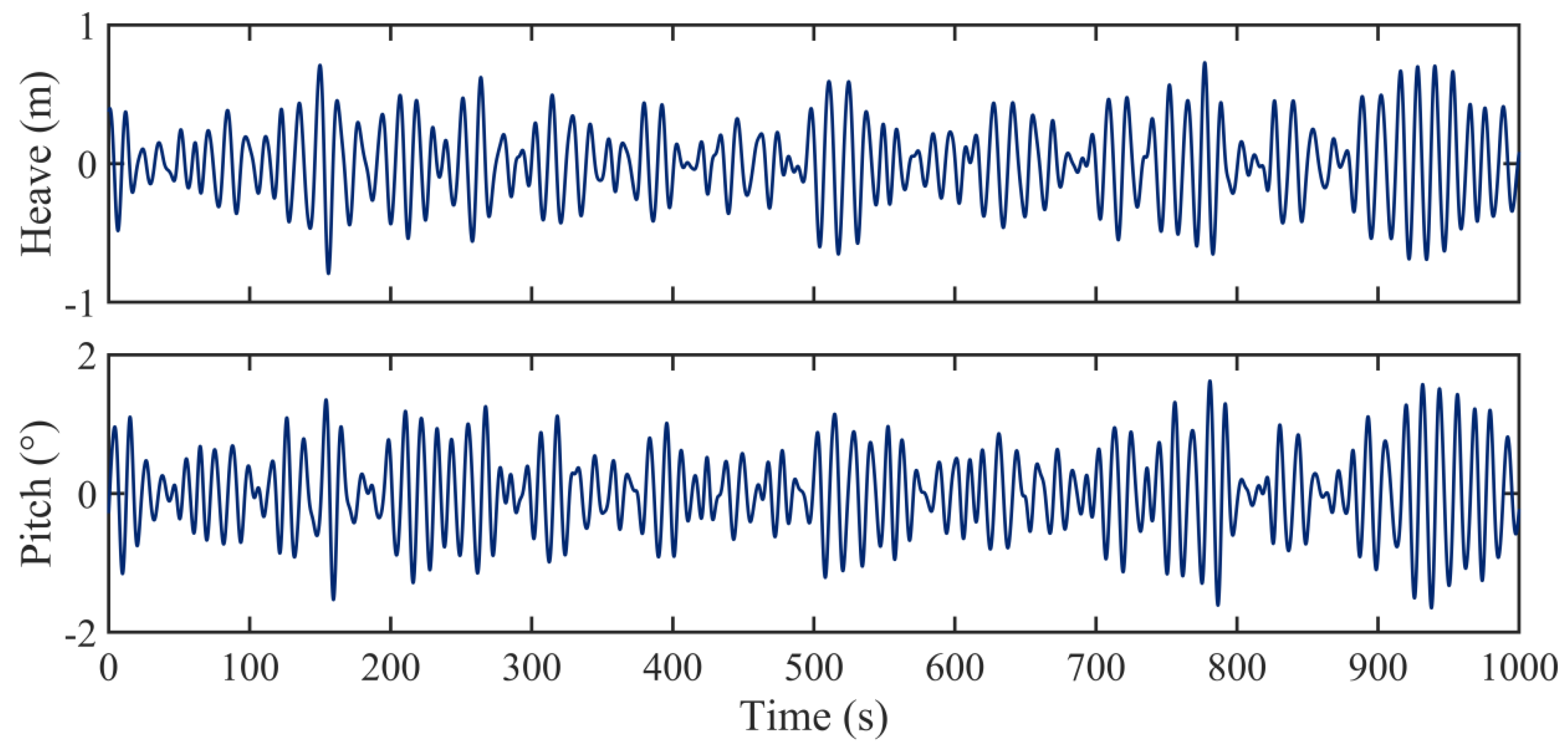
3.2. Network Training and Testing
4. Simulation Results and Analysis
4.1. Influence of Lead/Lag Compensation
4.2. Predictive Compensation without Measuring Noise
4.3. Predictive Compensation with Measuring Noise
5. Conclusions
- Passive heave compensation has minimal effects on a shipwreck’s motion at this depth;
- When the SAHCs are employed without motion prediction, the standard deviations of the shipwreck motion are significantly reduced, by 67.59% in heave and 53.77% in pitch;
- In the absence of measurement noise, a 0.6 s predictive compensation to counter system delay further reduces shipwreck motion by 66.89% and 68% in heave and pitch, respectively, compared to the non-prediction case;
- SAHCs without prediction exhibit poor compensation effects in the presence of noise pollution in barge motion measurement;
- In such scenarios, a 3 s predictive compensation can achieve the best compensating performance, resulting in a reduction in shipwreck motion to 44.14% in heave and 43.19% in pitch.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gray, W. Raising titans: How do you salvage a mega-ship? New Sci. 2013, 220, 48–51. [Google Scholar] [CrossRef]
- Dean, M.S. Salvage operations. In Springer Handbook of Ocean Engineering, 2nd ed.; Dhanak, M.R., Xiros, N.I., Eds.; Springer: Cham, Switzerland, 2016; pp. 985–1066. [Google Scholar] [CrossRef]
- 2016 Worldwide Survey of Heavy Lift Vessels. Available online: https://www.offshore-mag.com/resources/maps-posters/whitepaper/14034373/2016-worldwide-survey-of-heavy-lift-vessels (accessed on 9 November 2016).
- Yao, Z.; Wang, W.P.; Jiang, Y.; Chen, S.H. Coupled responses of Sewol, twin barges and slings during salvage. China Ocean Eng. 2018, 32, 226–235. [Google Scholar] [CrossRef]
- Zhang, F.; Hou, J.; Li, R.; Ning, D.; Gong, Y. Simulation and research of double barges SAHC salvage based on ‘Sewol’ salvage. Chin. Hydraul. Pneum. 2022, 45, 41. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, F.; Hou, J.; Ning, D.; Zhang, W.; Wang, D.; Gong, Y. Performance analysis of the passive heave compensator for hydraulic shipwreck lifting systems in twin-barge salvaging. Ocean Eng. 2023, 280, 114469. [Google Scholar] [CrossRef]
- Chalmers, P. Feature focus: Offshore innovations: Raising the Kursk. Mech. Eng. 2002, 124, 52–55. [Google Scholar] [CrossRef]
- Polmar, N.C.; White, M. Project Azorian: The CIA and the Raising of the K-129; Naval Institute Press: Annapolis, MD, USA, 2012. [Google Scholar]
- West, N. New details on the CIA and K-129. Int. J. Intell. Count. 2011, 24, 626–631. [Google Scholar] [CrossRef]
- Dean, J. The Taking of K-129: How the CIA Used Howard Hughes to Steal a Russian Sub in the Most Daring Covert Operation in History; Penguin: London, UK, 2018. [Google Scholar]
- Southerland, A. Mechanical systems for ocean engineering. Nav. Eng. J. 1970, 82, 63–74. [Google Scholar] [CrossRef]
- Woodacre, J.K.; Bauer, R.J.; Irani, R.A. A review of vertical motion heave compensation systems. Ocean Eng. 2015, 104, 140–154. [Google Scholar] [CrossRef]
- Hatleskog, J.T.; Dunnigan, M.W. Heave compensation simulation for non-contact operations in deep water. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar] [CrossRef]
- Ni, J.; Liu, S.; Wang, M.; Hu, X.; Dai, Y. The simulation research on passive heave compensation system for deep sea mining. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009. [Google Scholar] [CrossRef]
- Wang, W.P.; Yang, M.; Bian, Y.; Yan, S.; Yang, J.; Qin, L. Study of hydraulic synchronous lifting system for shipwreck salvage with cushion compensation. Chin. J. Constr. Mach. 2017, 15, 400–405. (In Chinese) [Google Scholar]
- Hatleskog, J.T.; Dunnigan, M.W. Active heave crown compensation sub-system. In Proceedings of the OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007. [Google Scholar] [CrossRef]
- Niu, W.; Gu, W.; Yan, Y.; Cheng, X. Design and full-scale experimental results of a semi-active heave compensation system for a 200 T winch. IEEE Access 2019, 7, 60626–60633. [Google Scholar] [CrossRef]
- Quan, W.; Liu, Y.; Zhang, Z.; Li, X.; Liu, C. Scale model test of a semi-active heave compensation system for deep-sea tethered ROVs. Ocean Eng. 2016, 126, 353–363. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Nonlinear control of an active heave compensation system. Ocean Eng. 2008, 35, 558–571. [Google Scholar] [CrossRef]
- Woodacre, J.K.; Bauer, R.J.; Irani, R. Hydraulic valve-based active-heave compensation using a model-predictive controller with non-linear valve compensations. Ocean Eng. 2018, 152, 47–56. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, S.; Zeng, F.; Li, L. Simulation Research on the Semi-active Heave Compensation System Based on H8 Robust Control. In Proceedings of the 2010 International Conference on Intelligent System Design and Engineering Application, Changsha, China, 13–14 October 2010. [Google Scholar] [CrossRef]
- Huang, L.M.; Duan, W.Y.; Han, Y.; Chen, Y.S. A review of short-term prediction techniques for ship motions in seaway. J. Ship Mech. 2014, 18, 1534–1542. [Google Scholar] [CrossRef]
- Triantafyllou, M.; Athans, M. Real time estimation of the heaving and pitching motions of a ship, using a kalman filter. In Proceedings of the OCEANS 81, Boston, MA, USA, 16–18 September 1981. [Google Scholar] [CrossRef]
- Triantafyllou, M.; Bodson, M.; Athans, M. Real time estimation of ship motions using Kalman filtering techniques. IEEE J. Ocean. Eng. 1983, 8, 9–20. [Google Scholar] [CrossRef]
- Fusco, F.; Ringwood, J.V. Short-term wave forecasting with AR models in real-time optimal control of wave energy converters. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010. [Google Scholar] [CrossRef]
- Yumori, I. Real time prediction of ship response to ocean waves using time series analysis. In Proceedings of the OCEANS 81, Boston, MA, USA, 16–18 September 1981. [Google Scholar] [CrossRef]
- Suhermi, N.; Prastyo, D.D.; Ali, B. Roll motion prediction using a hybrid deep learning and ARIMA model. Procedia Comput. Sci. 2018, 144, 251–258. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, P.; Peng, Y.; Liu, D. Roll motion prediction of unmanned surface vehicle based on coupled CNN and LSTM. Future Internet 2019, 11, 243. [Google Scholar] [CrossRef]
- del Águila Ferrandis, J.; Triantafyllou, M.S.; Chryssostomidis, C.; Karniadakis, G.E. Learning functionals via LSTM neural networks for predicting vessel dynamics in extreme sea states. Proc. R. Soc. A 2021, 477, 20190897. [Google Scholar] [CrossRef]
- Tang, G.; Lei, J.; Shao, C.; Hu, X.; Cao, W.; Men, S. Short-term prediction in vessel heave motion based on improved LSTM model. IEEE Access 2021, 9, 58067–58078. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, X.; Tian, X.; Li, X.; Lu, W. Predicting heave and surge motions of a semi-submersible with neural networks. Appl. Ocean Res. 2021, 112, 102708. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, X.; Tian, X.; Lu, W.; Li, X. Probabilistic prediction of the heave motions of a semi-submersible by a deep learning model. Ocean Eng. 2022, 247, 110578. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, X.; Lu, W.; Tian, X.; Li, X. Real-time prediction of 6-DOF motions of a turret-moored FPSO in harsh sea state. Ocean Eng. 2022, 265, 112500. [Google Scholar] [CrossRef]
- Mi, Z.; Pan, L.; Chen, J.; Chen, L.; Wu, R. Consecutive lifting and lowering electrohydraulic system for large size and heavy structure. Autom. Constr. 2013, 30, 1–8. [Google Scholar] [CrossRef]
- Molin, B. Offshore Structure Hydrodynamics; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar]
- Ma, K.T.; Luo, Y.; Kwan, C.T.T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Cambridge, MA, USA, 2019. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Salvage Barge | Mooring System | ||
|---|---|---|---|
| Size (m) | 140 × 56 × 8.88 | Line type | Catenary stud chain |
| Pitch inertial (kg·m2) | 4.3 × 1010 | Mooring radius (km) | 2.4 |
| Draft (m) | 3.6 | Chain length (m) | 2560 |
| Displacement (t) | 26159 | Unit mass (kg/m) | 107 |
| Mooring system | Chain diameter (mm) | 70 | |
| Stiffness (kN/m) | 4.9 × 105 | Maximum expected tension (kN) | 4196 |
| Pre-tension (kN) | 746.7 | ||
| Layer Sequence | Layer | Tensor Size |
|---|---|---|
| 1 | Sequential input | P × 2 × n |
| 2 | LSTM layer | P × n × 1024 |
| 3 | LSTM last output | P × 1024 |
| 4 | Fully connected layer | P × 512 |
| 5 | Fully connected layer | P × 512 |
| 6 | Output layer | P × 2m |
| Parameter | Unit | Value | Notation | |
|---|---|---|---|---|
| Shipwreck motion dynamic | Pitch inertial | kg·m2 | 1.7 × 109 | Iw |
| Additional coefficient | 1.5 | kadd | ||
| Lifting sling | Wire rope diameter | mm | 50 | |
| Wire rope number | 8 | |||
| 600 m sling mass | t | 53.98 | ms | |
| Sling stiffness | kN/m | 1.31 × 103 | ks | |
| Passive part of SAHC | Cylinder total area | m2 | 0.25 | Ap |
| Accumulator volume | L | 1500 | Vp | |
| Adiabatic index | 1.4 | n | ||
| Active part of SAHC | Source pressure | MPa | 20 | Ps |
| Cylinder total area | m2 | 0.25 | Aa | |
| Orifice flow coefficient | 0.6 | Cd | ||
| Throttle gradient | m | 0.0628 | ω | |
| Oil density | kg/m3 | 860 | ρoil | |
| Oil bulk modulus | MPa | 1000 | βe | |
| SAHC | Piston total mass | kg | 5000 | mc |
| Damping coefficient | N/(m/s) | 1 × 104 | bc | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Ning, D.; Hou, J.; Du, H.; Tian, H.; Zhang, K.; Gong, Y. Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. J. Mar. Sci. Eng. 2023, 11, 998. https://doi.org/10.3390/jmse11050998
Zhang F, Ning D, Hou J, Du H, Tian H, Zhang K, Gong Y. Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. Journal of Marine Science and Engineering. 2023; 11(5):998. https://doi.org/10.3390/jmse11050998
Chicago/Turabian StyleZhang, Fengrui, Dayong Ning, Jiaoyi Hou, Hongwei Du, Hao Tian, Kang Zhang, and Yongjun Gong. 2023. "Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks" Journal of Marine Science and Engineering 11, no. 5: 998. https://doi.org/10.3390/jmse11050998
APA StyleZhang, F., Ning, D., Hou, J., Du, H., Tian, H., Zhang, K., & Gong, Y. (2023). Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. Journal of Marine Science and Engineering, 11(5), 998. https://doi.org/10.3390/jmse11050998