1. Introduction
Owing to the features of real-time transmission [
1], publicly accessible databases [
2], and providing rich information [
3], automatic identification systems (AISs) are currently widely utilized in the maritime industry. AIS data are broadcast from ship to ship or from a ship to a terrestrial based station via very high frequency (VHF) radio waves, which have the limitation of coverage distance. However, benefiting from the progress of space technology, AIS data can be transmitted from a wider range. This contributes to the higher applicability of AIS data and reaching a new milestone in maritime digitalization [
4]. As is well known, AIS data consist of abundant information mainly including three parts: that is, static information, dynamic information, and voyage-related information [
5]. Among them, dynamic information delivers data such as a ship’s position, its speed over ground (SOG), course over ground (COG), rate of turn, and navigation status, which are important for navigating ships and thus are focused on in this research. Because ships can exchange information with each other in almost real time, AIS data have been extensively considered in the development of various fields. In [
6,
7,
8], AIS data were applied to the analysis and management of shipping traffic. The problems caused by ships such as pollution, the transfer of alien species, and impacts on sea creatures can be efficiently solved. Expanding to the offshore area, the spatial planning problem of fishing ground has been improved based on historical AIS data [
3,
9,
10]. Moreover, for the tourism industry, AIS data have been applied to estimate whale watching efforts [
11]. Therefore, it can be seen that AIS data can play an important role in all sorts of maritime problems, especially in the era of increasing attention toward environmental issues nowadays.
Despite the valuable results obtained in the above research, navigation safety is always the most crucial and life-critical issue of humans in the maritime industry. It is worth mentioning that the development of AIS data was originally focused on collision avoidance between ships [
3,
4,
11]. Up to now, it is mandatory for AIS equipment to be installed on cargo ships over 300 gross tonnage (GT) on international voyages, over 500 GT even if not on international voyages, and all passenger ships irrespective of size [
12,
13,
14]. Based on the application of AIS data, the collision avoidance issue has been widely investigated, and the related design method is flourishing [
15,
16]. However, no matter the development of a more efficient navigation or collision avoidance method, they both rely on precise control of the ship’s dynamic behavior. In the existing papers, there are just a few researchers discussing the control problem based on AIS data. In [
17], a tracking controller was proposed for ships in shallow or confined waterways. In [
18,
19], model predictive controllers were proposed for the collision avoidance problem. In [
20], a fuzzy adaptive proportional–integral–derivative control method was proposed. Nevertheless, the controller design approach has not been developed or mentioned in detail. This reason motivates this research to develop a fuzzy controller design approach directly based on AIS data.
When a ship is navigating the ocean, the dynamic behavior of the ship will consist of non-linearities of the complex working environment. This will also make the controller difficult to design to obtain precise control performance. Moreover, the information obtained from AISs is a group of discrete-time data. This means that there is no mathematical model established to describe the ship’s dynamic behavior with AIS data. In [
21], a Takagi–Sugeno (T-S)-fuzzy-model-based observer was proposed by the authors to provide a good choice to construct a mathematical model for AIS data and transfer the non-linear design problem into a linear problem. It is worth noting that if the mathematical model can be obtained, the controller design approach can also be developed conveniently with AIS data. However, the dynamic behavior of ships will also suffer from disturbances such as ocean winds, waves, and currents, which are often unpredictable [
22,
23]. In [
12], the researchers also developed an analysis method of wind and current in ports and waterways with AIS data. It is obvious that the purpose of precise control will become more difficult to achieve when the dynamic behavior of ships is affected by a disturbance. In the limited region of inland waterways, imprecise control may make collisions occur more easily. Additionally, there are also some disturbance factors in AIS data such as incorrect data and communication faults [
12,
24,
25]. The disturbance will also result in a deviation in the estimation results obtained for AIS data in [
21]. Based on the T-S fuzzy model, the control problem of the non-linear ship dynamic system with external disturbance was efficiently solved [
26,
27,
28]. From the simulation results, it can be seen that the effect of a disturbance can be suppressed. Extending the results of [
26,
27,
28], the T-S-fuzzy-model-based observer and controller design approach is proposed in this research to simultaneously estimate and control a ship’s dynamic path directly based on AIS data.
In this research, a novel fuzzy controller design approach is proposed for AIS data to estimate and control the ship’s dynamic path. Referring to the estimation method in [
21], the fuzzy observer can be designed to estimate the ship’s dynamic behavior based on AIS data. On top of that, the constructed T-S-fuzzy-model-based observer can also provide a mathematical model for the description of information of the discrete-time AIS data. Benefitting from the feature, the fuzzy controller is also able to be conveniently designed for the control problem based on AIS data. The effect of stochastic behavior is also considered in the fuzzy model to describe the unpredictable external disturbances, such as ocean waves, winds, and current, or error data. It is worth noting that although AIS data can transmit the nearly real-time dynamic information of ships, the current disturbance information cannot be known in the data. Moreover, the effect of these disturbances is not exactly the same for each ship in different places. In [
29], the researchers discussed the control problem of the ship’s dynamic behavior based on AIS data and the external disturbance is considered. However, the disturbance was only considered for the constant way and speed of ocean waves. In addition, the non-linear mathematical model for control problems was constructed in three orders. For the complex environment of the ocean, the simple disturbance may not be enough to describe the effect of the mentioned factors. To improve the control performance in the dynamic positioning problem of ships, observer-based controller design methods have been proposed and the more complex disturbances have been considered [
30,
31,
32]. In terms of the root mean square, a so-called covariance control theory has also been proposed for the analysis and to suppress stochastic behaviors [
33,
34]. Over the past few decades, many researchers have extended the covariance control method to efficiently solve the control problem of the ship’s dynamic behavior with complex disturbances based on the T-S fuzzy model [
26,
27,
28]. Therefore, based on the T-S-fuzzy-model-based observer for AIS data, a fuzzy controller design approach is proposed in this research by combining it with the covariance control theory to suppress the effect of stochastic disturbances in the estimation problem. Based on the above statements, the novelty and contributions are concluded as follows.
- (1)
Based on the T-S fuzzy model, the observer and controller design problems for a non-linear ship dynamic path based on AIS data are efficiently transferred into the linear problem.
- (2)
Extending the results of [
21], the fuzzy controller design approach subject to variance constraint is proposed based on the T-S fuzzy observer, which estimates the ship dynamic path of AIS data well.
- (3)
The fuzzy controller design approach in this research can not only be applied as a supplementary to improve the estimation performance of the fuzzy observer under the effect of stochastic disturbance, but it can also be provided as a control scheme for the ship’s dynamic path based on AIS data with the proper settings.
This research is presented with the following organization. In
Section 2, a five-order fuzzy observer is constructed based on the T-S fuzzy model to represent the non-linear ship dynamic behavior based on the AIS data with stochastic disturbance. In addition, the covariance matrix and variance constraint are stated for the state of error system. In
Section 3, the observer gain is designed for the estimation purpose of AIS data. Based on the fuzzy observer, a fuzzy controller design approach subject to variance constraint is provided for the ship’s dynamic behavior with disturbed AIS data, and the stability analysis is implemented by Lyapunov theory. In
Section 4, the simulation results are obtained for the AIS data from Kaohsiung Port and extended to the assumed data based on Keelung Port to verify the effectiveness of the design approach in this research. Finally, some conclusions are given in
Section 5.
2. Fuzzy Observer Design for Non-Linear Ship Dynamic Path Based on AIS Data
To design the observer for AIS data, it is necessary for the mathematical equation of the dynamic system to be established first. Due to the complex working environment, the non-linear system is considered for the more precise description of the ship’s dynamic behavior. According to the research [
21,
35], the non-linear system based on AIS data can be presented as follows:
where
and
are the ship’s north and east positions, respectively,
is SOG,
is COG, and
and
are the linear acceleration and course rate which are provided as the inputs of dynamic systems, respectively. In [
21,
35], these inputs are obtained by the following dynamic equations:
where
is the saturation function,
and
are the time constants, and
and
are obtained from AIS data measurement. The details of the non-linear system (1)–(2) are not going to be provided in this paper; they can be seen in [
21,
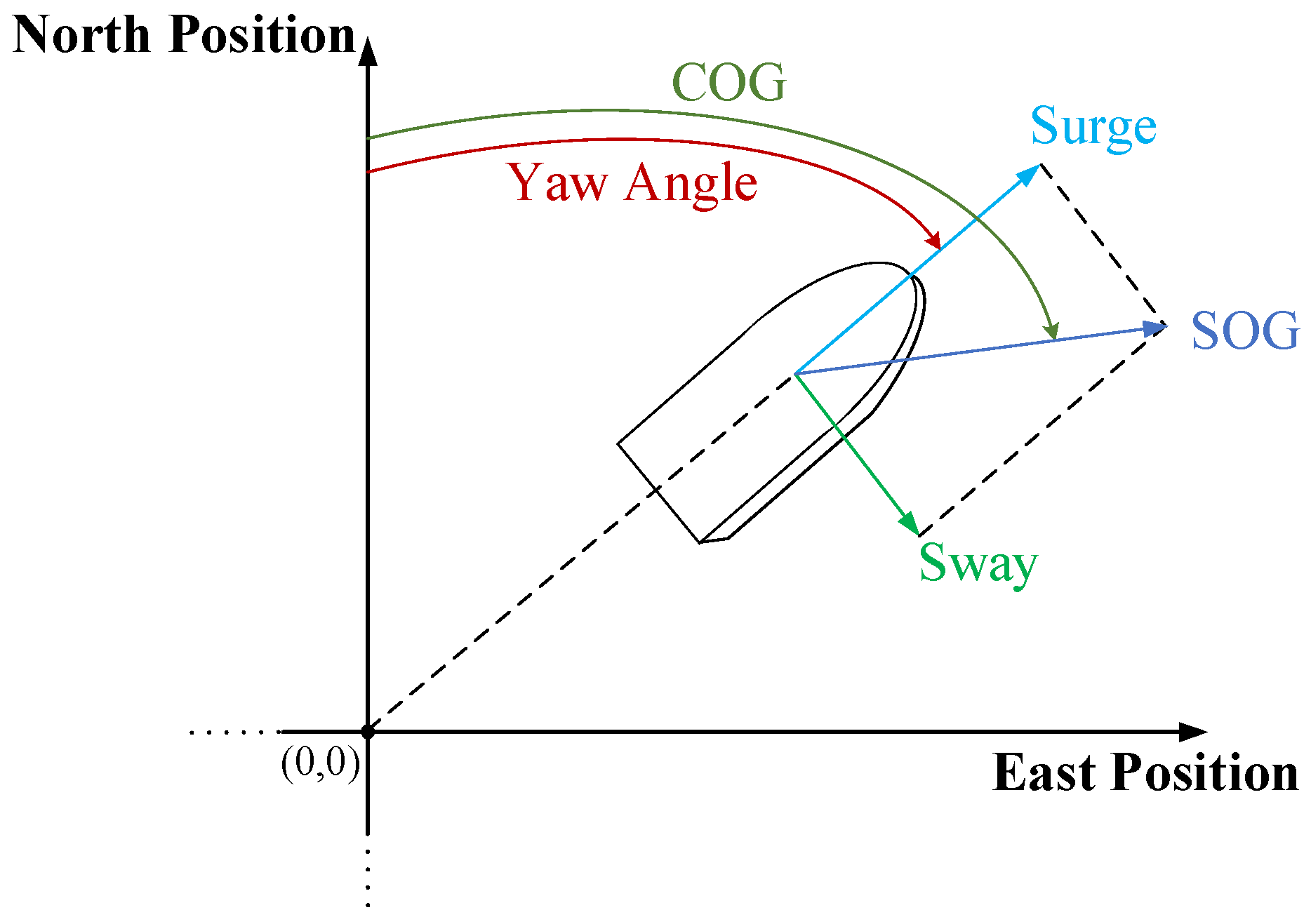
35]. To develop the controller design approach, the non-linear ship dynamic systems (1)–(2) can be further transferred into the following five-order system:
where
and
denote the
and
, respectively,
is the yaw angle of ships,
and
are the surge motion and sway motion of ships, respectively,
is the external disturbance which is considered as zero-mean Gaussian white noise with the density
, and
,
,
are the magnitudes of the disturbance effect. To present the relationship of the non-linear system (1)–(3) more clearly, the schematic diagram related to all states is given with a ship in
Figure 1.
Referring to the research [
2,
12,
16,
29], the relationship of the yaw angle and COG can be presented as follows:
where
is the so-called sideslip angle which possesses the following relationship with the surge and sway motions:
Remark 1 (Non-linear Ship Dynamic Behavior). In the non-linear system (1), the inputs of ship’s dynamic behavior are provided by (2) with AIS data measurement. That is, the non-linear system (1) does not consist of the control input. In addition, in the transferred non-linear system (3), the control inputs are given as to . Notice that the control problem of this research is purely discussed for the dynamic path of ships such that only the position and speed are considered as system states. As long as the acceleration is controlled, the position and speed of ships can be adjusted to the desired states. Moreover, the control force applied on ships also can be transferred into the acceleration according to the ship parameters. It is concluded that the controller design approach proposed in this research for AIS data can be applied to any other ships via substituting the various kinds of parameters into the method.
In order to propose the fuzzy controller design approach, it is necessary for the T-S-fuzzy-model-based observer to be established first. Based on the T-S fuzzy model, the observer and controller design problem can be efficiently transferred into the linear problem [
36,
37,
38]. Thus, the efficient T-S fuzzy modelling method in [
21,
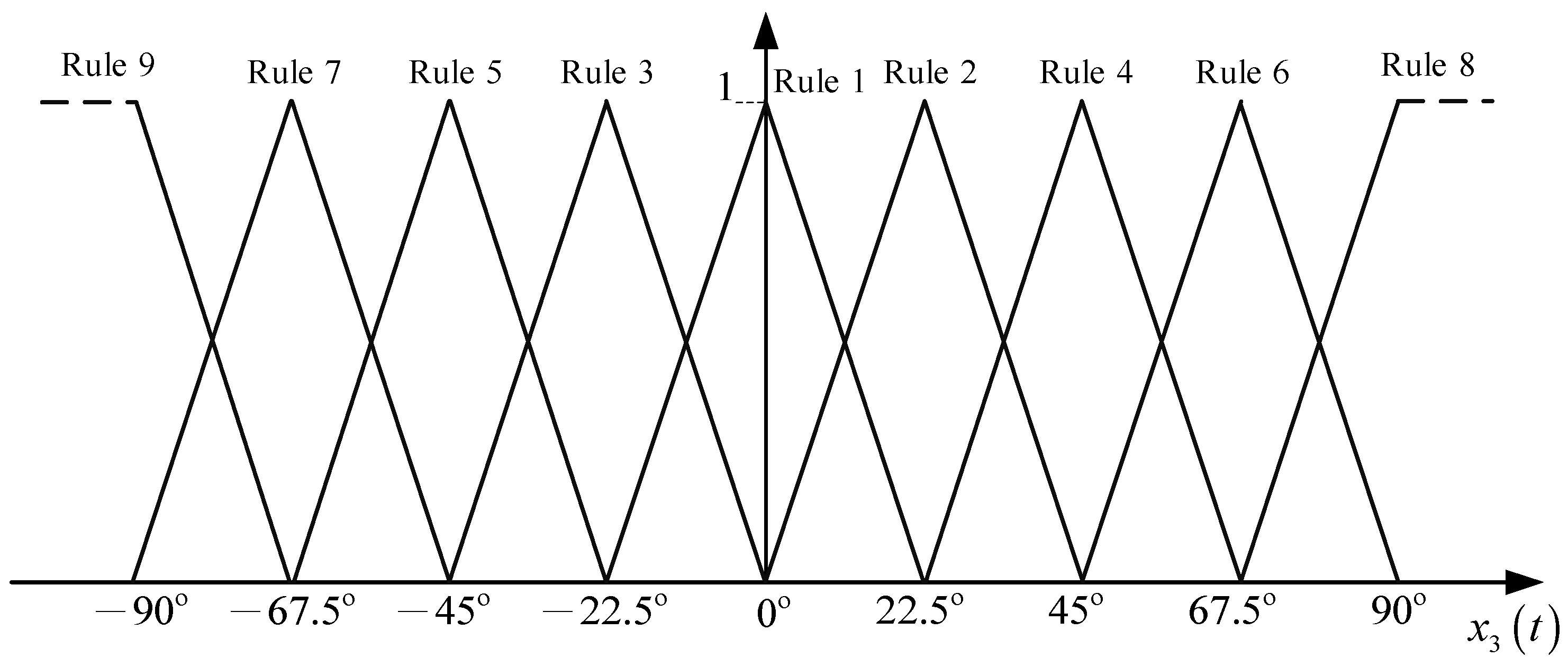
39] was adopted to construct the model for the non-linear system (3). Defining the state vector
, the following nine operating points are selected for the model in this research:
According to the operating points (5), the membership function is designed in
Figure 2. Moreover, the corresponding nine-rule T-S fuzzy model can be obtained via calculation of the linearization method in [
39]. The details of the calculation process can be referred to in the research [
21,
39].
where
is the inputs vector,
,
, and
are the constant matrices with the dimensions
,
, and
, respectively. Note that the membership function in
Figure 2 is represented as
in model (6). That is,
is rule 1,
is rule 2, and so on. To save space in this section, the model matrices
,
, and
for each rule are presented in
Appendix A.
Extending the results in [
21], the following fuzzy observer was designed based on the T-S fuzzy model (6).
Observer Rule i:
where
is the observed state vector,
is the observer gain and
represents the diagonal matrix with the element
. Via the defuzzification process, the following overall fuzzy model and fuzzy observer are obtained from (6) and (7), respectively:
Overall Fuzzy Observer:
where
which has the properties
and
,
represents the membership grade of
corresponding to
Figure 2.
Subtracting fuzzy observer (9) from the model (8), one can obtain the following error dynamic system:
where
is the error vector. Referring to the results obtained in [
21,
35], the estimation purpose of ship dynamic behavior with AIS data can be achieved if the values of
,
,
,
, and
in matrix
are all selected with positive values. Similarly, the error dynamic behavior of the system (10) is expected to converge to zero such that the estimation is completed if all the eigenvalues of the matrix
are located on the left-half plane.
However, it can be seen that the error system (10) still consists of stochastic disturbance
. This will result in unprecise estimation results, and the design method in [
21] will become invalid. Additionally, the designed fuzzy observer (9) cannot be applied for the expression of AIS data. It is worth noting that not only is a fuzzy controller design approach provided for solving the control problem of the dynamic path with AIS data, the estimation results can also be improved even when the dynamic behavior of ships is affected by stochastic disturbances.
To solve the problem of stochastic behavior, the covariance control theory [
33,
34] is applied in this research. Extending the results in [
26,
27,
28], the error covariance matrix is constructed in the following definition to represent the energy of the state error
of the fuzzy observers (7) and (9). Moreover, the variance constraint can also be designed for each covariance matrix in terms of root mean square.
Definition 1. For the state error affected by the stochastic disturbance of each subsystem in the error system (10), the following covariance matrix is applied to represent the state error energy:where and denote the expectation of . Based on the covariance matrix (11), the individual variance constraint is also designed to deal with the problem of disturbed error energy as follows:where , denotes the individual root mean squared constraint and denotes the -th diagonal element of the matrix .
By establishing the error covariance matrix (11) and satisfying the individual variance constraint (12), the energy of state error can be efficiently analyzed and suppressed under the effect of stochastic disturbance .
In the next section, for the ship’s dynamic behavior based on AIS data, a fuzzy controller design approach is provided based on the fuzzy observer to achieve the control purpose and to improve the estimation performance.
3. Fuzzy Controller Design Approach for Ship’s Dynamic Path Based on AIS Data
In this section, a fuzzy controller subject to the individual variance constraint with (12) is designed to suppress the disturbed state error energy of the ship’s dynamic behavior. In addition, Lyapunov theory is applied to develop the stability analysis method for the closed-loop fuzzy model.
Firstly, extending the fuzzy observer gain design method in [
21], the observer gains
,
,
,
, and
in
can be designed. Note that the stochastic disturbance is assumed as
to apply the design method in [
21]. Before developing the fuzzy controller design approach, a remark is given as follows for this assumption of the observer gain design.
Remark 2 (Observer Gains Designed without Considering the Disturbance). From the results obtained by [21], the designed observer gains can perceptibly achieve good, estimated performance. It comes with the territory that the fuzzy observer gains also can be designed for the disturbed dynamic behavior of the system (9) by the design algorithm in [21] until the objective estimated performance is obtained. However, the observer gains design method of [21] did not directly consider the factor of disturbance. In addition, the method was developed basically depending on the simulation results. That is, if the fuzzy observer gains are designed via the algorithm in [21] to simultaneously estimate the ship’s dynamic behavior based on AIS data and solve the problem of disturbances, the gains will become improperly big. Although the expected estimation results can be achieved by the fuzzy observer, the value of gains is not cost effective. Because of this reason, the fuzzy controller design approach directly against the effect of stochastic disturbances is proposed in this research. After the fuzzy observer gains are obtained via the algorithm in [
21], the fuzzy controller design approach was developed for AIS data as follows. Via the so-called Parallel Distributed Compensation (PDC) method, the following fuzzy controller can be designed with the same premise part of the fuzzy observer (7).
where
is the control gains to be designed. Similar to the fuzzy model and observers (6)–(9), the following overall fuzzy controller can be obtained via defuzzification:
Note that the input signal
is obtained from the dynamic equation of (2) with the measurement of AIS data in [
21,
35]. Either for system (1) or system (3), the function of the inputs is to adjust the speed and position of ships. Therefore, the input
can also be provided by the controllers of the ships, which is applied as the different input in [
21,
35] for the ship dynamic system (1) or (3). Thus, the fuzzy control input can be substituted into the fuzzy observer (9) for the control problem of ship dynamics as follows:
In the fuzzy observer (15), the design of fuzzy control input can also be seen as the supplementary of original inputs to achieve the required adjustment of the ship’s dynamic behavior. Subtracting the fuzzy model (8) from the fuzzy observer (15) and substituting the fuzzy controller (14) into the system, one can obtain the following error dynamic system:
Remark 3 (Fuzzy Controller Design for AIS Data). Via applying the error feedback fuzzy controllers (13)–(14), the error system (16) can be obtained to better estimate the ship dynamic’s behavior with AIS data under the effect of stochastic disturbance . It is worth noting that if the fuzzy controller is designed in the form of state feedback, , and the objective ship dynamic behavior based on the AIS represented by (3) and (8) is properly designed as , the control problem of the fuzzy observer can be obtained as follows:
Obviously, the control problem of the fuzzy observer becomes the general control problem for the ships whose dynamic behavior is necessary to be controlled to the destination. In this paper, the fuzzy controller (14) was first designed for the purpose of estimating the ship’s dynamic behavior with stochastic disturbances.
To develop the fuzzy controller subject to individual state variance constraint , the following Lyapunov stability condition with the covariance matrix (11) was constructed for the error system (16):
Lemma 1 [26,27,28]. The error system (16) is stable in the mean square if there exist positive definite matrices
subject to the variance constraint by (12) such that the following conditions are satisfied:where is the density of stochastic behaviors mentioned in (3). Under sufficient conditions, the equality of condition (18) is not able to be solved by the convex optimization algorithm of linear matrix inequality (LMI). Moreover, the covariance matrices , which may be different from each other for all rules, makes it difficult to be analyzed in the design approach. Due to the problems, the stability criteria of error system (17) are proposed in the following theorem based on Lyapunov theory and the individual variance constraint :
Theorem 1. If there exists a common positive definite matrix
and the matrices such that the following sufficient conditions are all satisfied, then the closed-loop error system (17) is said to be stable in the mean square. In addition, the estimation purpose of ship dynamic behavior based on AIS data can be achieved with the stochastic disturbance
:where .
Proof 1. Subtracting (18) from (20), one can obtain the following inequality:
According to the stability criteria of Theorem 1, if the conditions (20)–(21) are satisfied by the fuzzy controller (14), the closed-loop matrix
becomes stable and negative definite. Consequently, the fact
is also obtained by the inequality (23). Based on the statement of individual variance constraint (12), the following relationship is obtained by satisfying the condition (22).
Via the application of , which is called the upper bound covariance matrix, in the design method of Theorem 1, all the covariance matrices of state error in each fuzzy subsystem can satisfy the variance constraint by (24). In addition, the equality of condition (18) is efficiently substituted by the inequality condition (20) such that the LMI tool in various programs can be conveniently applied to solve the control problem of Theorem 1. □
Via the fuzzy controller of (13)–(14) designed by Theorem 1, the better estimation performance of ship dynamic behavior based on disturbed AIS data can be obtained based on the fuzzy observer (15). In the next section, a group of real AIS data from Kaohsiung Port and the assumed AIS data from Keelung Port are selected for the simulation to verify the effectiveness of Theorem 1.
4. Simulations of Ship’s Dynamic Path Based on AIS Data via Fuzzy Controller Design Approach
In this section, two examples of simulations are presented to demonstrate the effectiveness of the fuzzy controller design approach in
Section 3. To implement the simulations, a group of real AIS data from Kaohsiung Port and the assumed AIS data around Keelung Port were selected. Firstly, the simulation based on the AIS data of Kaohsiung Port is given in Example 1 as follows.
4.1. Example 1 (Simulation of Real AIS Data from Kaohsiung Port)
Once the ships had navigated into Kaohsiung Port, a group of historical AIS data was selected for the simulation in this example. From the AIS data, the longitude and latitude data are first presented in the following table.
Based on the longitude and latitude AIS data in
Table 1, the following figure is provided to further present the ship positions of each received time for the estimation and control problems by using Google Maps. Note that the index from 1 to 17 in
Figure 3 sequentially denotes the received time in
Table 1.
In this research, TWD97 data were applied to represent the longitude and latitude data obtained from the AIS in the region around Taiwan [
40], which is different from the design method in [
21,
35]. Via the projection method for TWD97 data [
40], the AIS data in
Table 2 can be obtained from the data in
Table 1. Additionally, the COG and SOG data obtained by the AIS are also presented in
Table 2.
Referring to [
2,
12,
16,
29], four AIS data in
Table 2 for non-linear dynamic systems (1)–(2) can be transferred into five AIS data for systems (3)–(4) in
Table 3 to develop the fuzzy controller (14) for the estimation and control problems.
Before applying the fuzzy controller design approach for (14), the fuzzy observer gains can be designed for (9) via the gain design algorithm proposed in [
21]. Without considering the effect of stochastic disturbance,
, five gains in matrix
can be obtained as follows:
Similar to the research [
21], the first-order hold method is applied to transfer the discrete-time AIS data into the continuous-time data for the simulation. To present the simulation results, the state initial conditions of fuzzy observer (9) are given as follows:
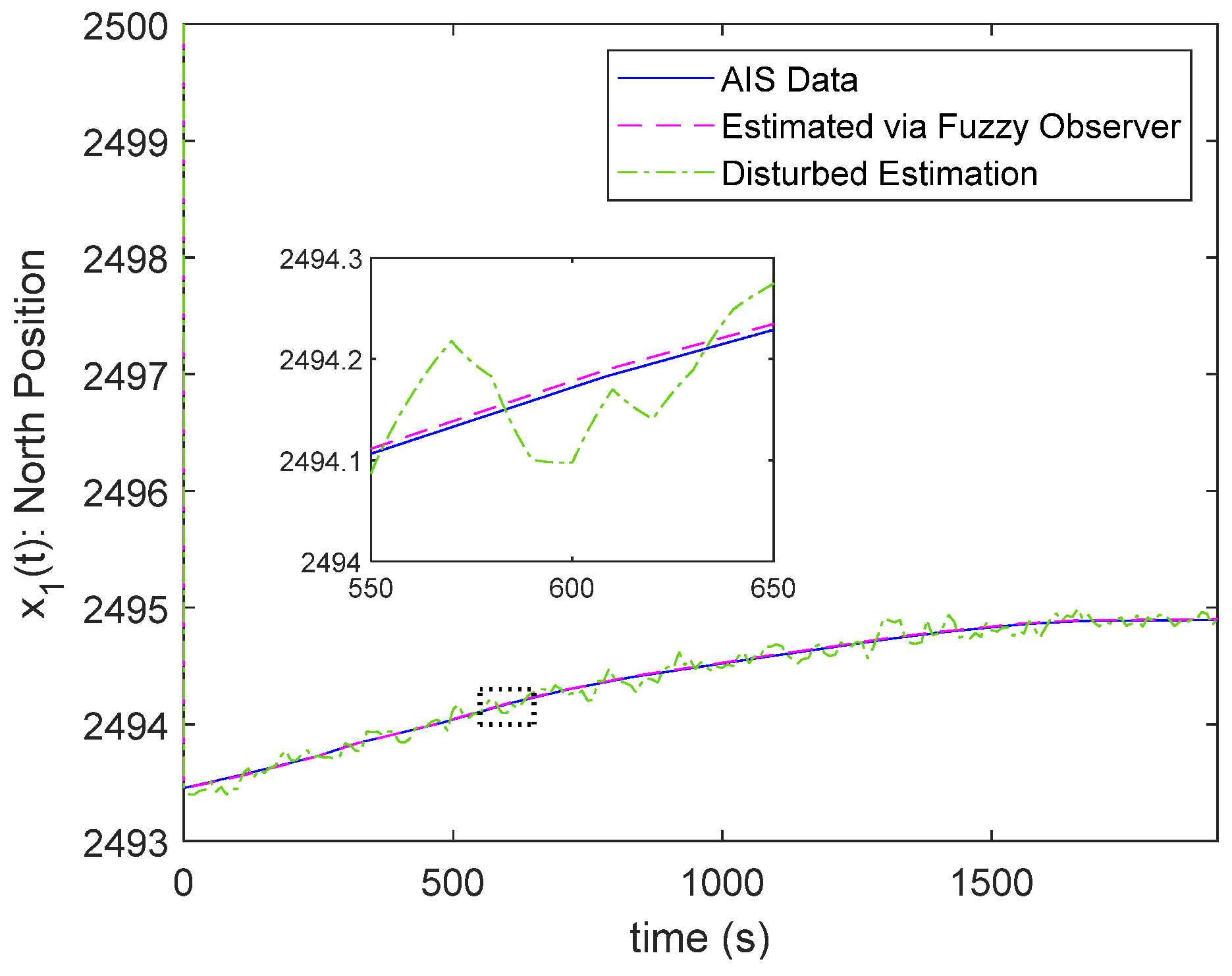
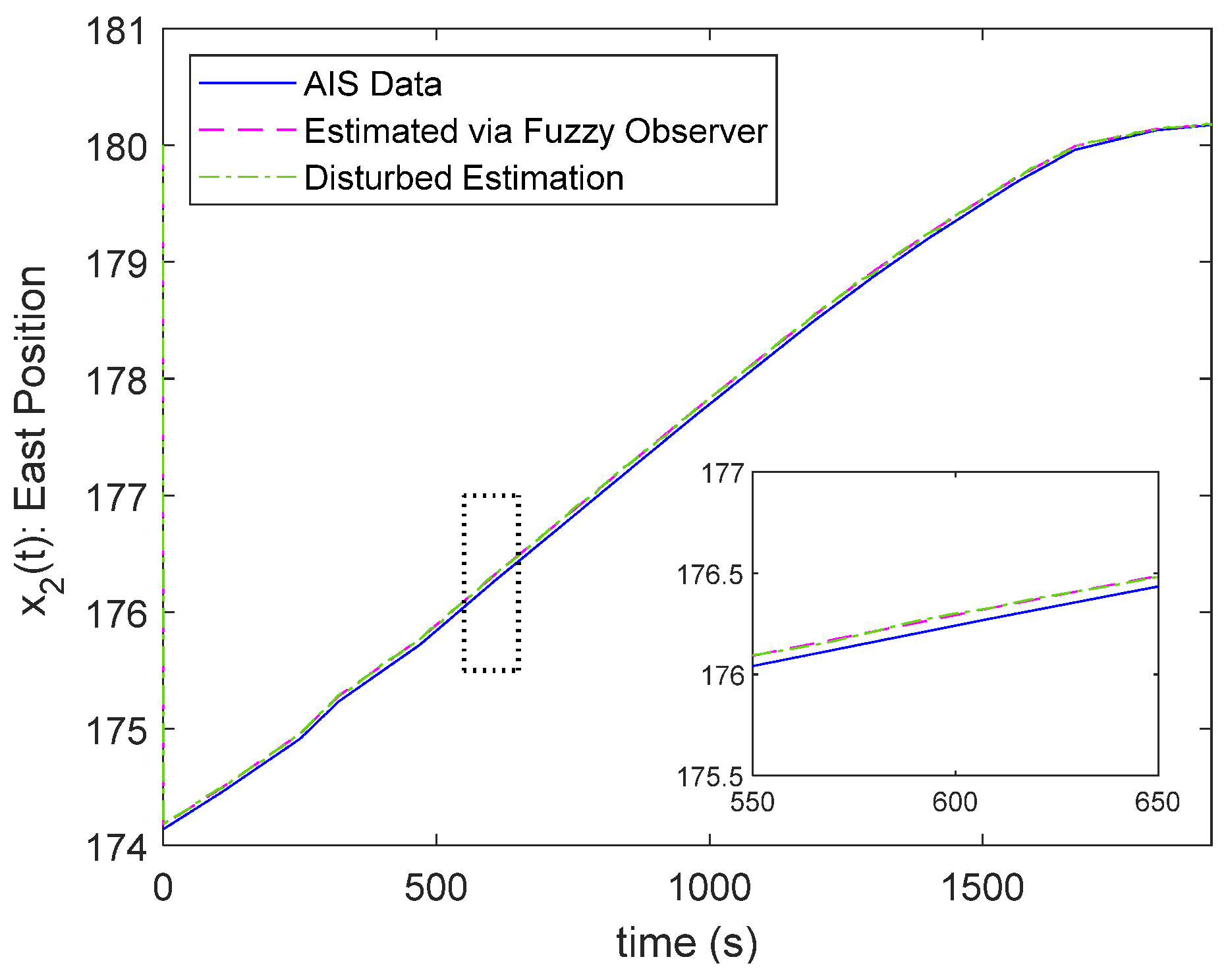
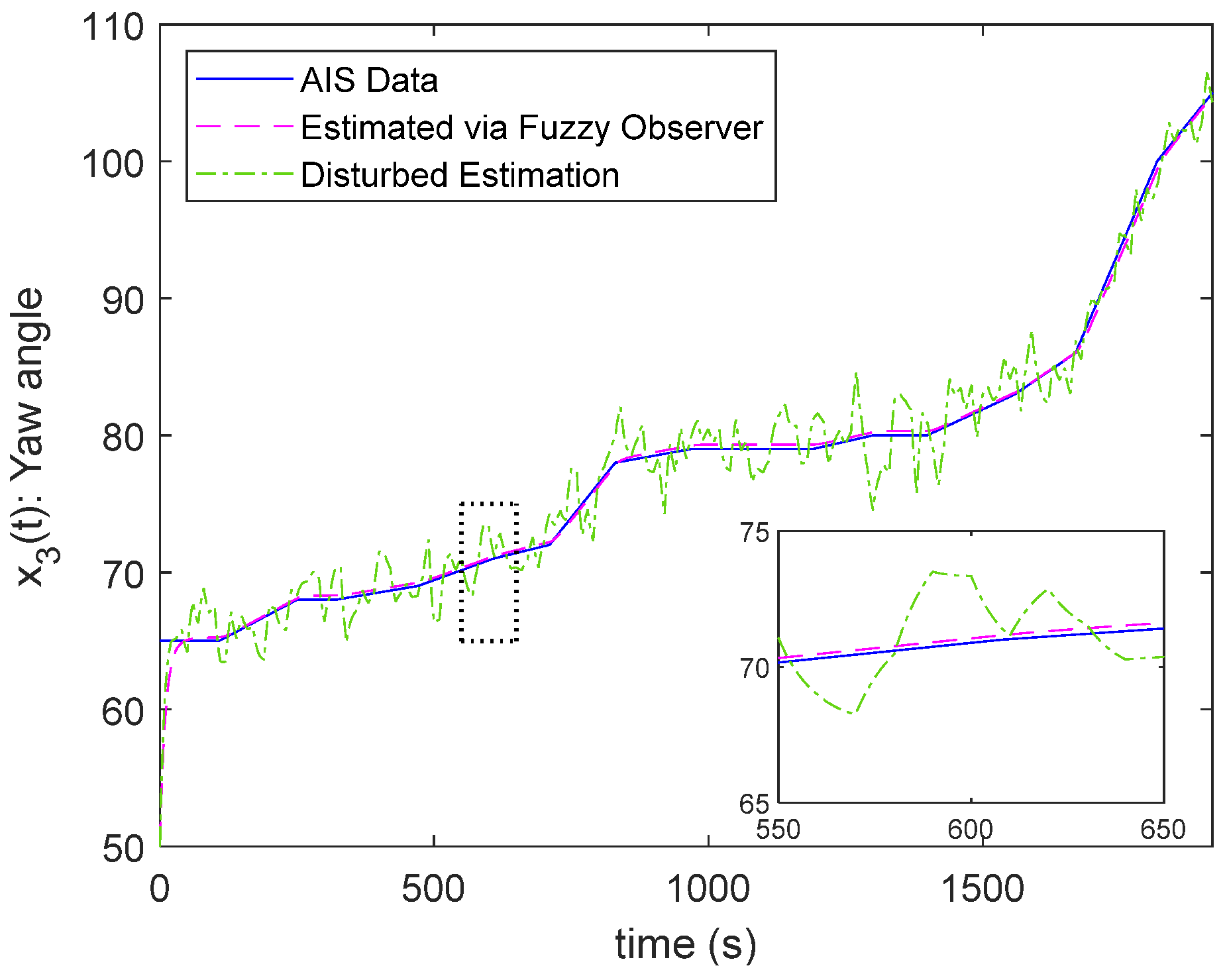
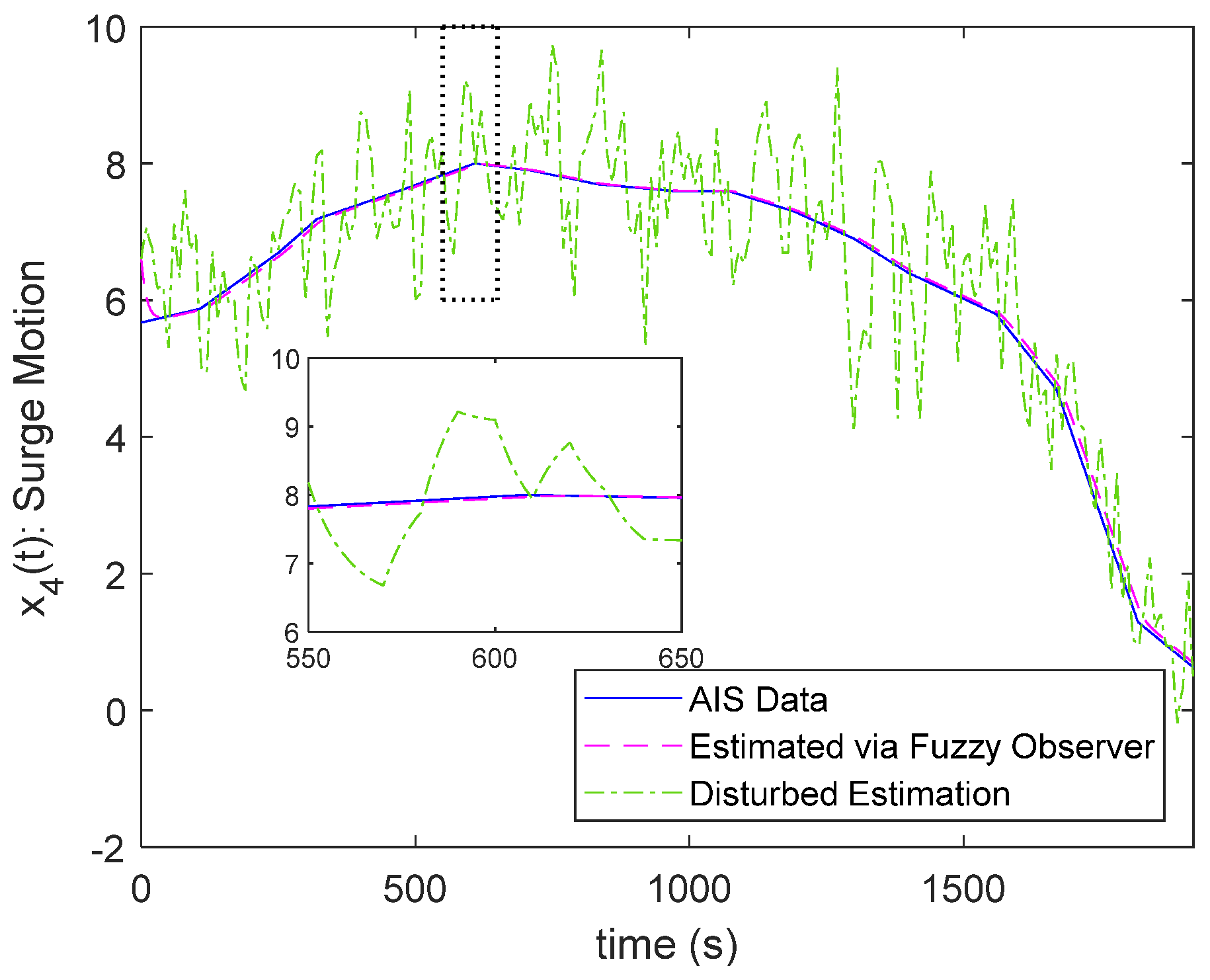
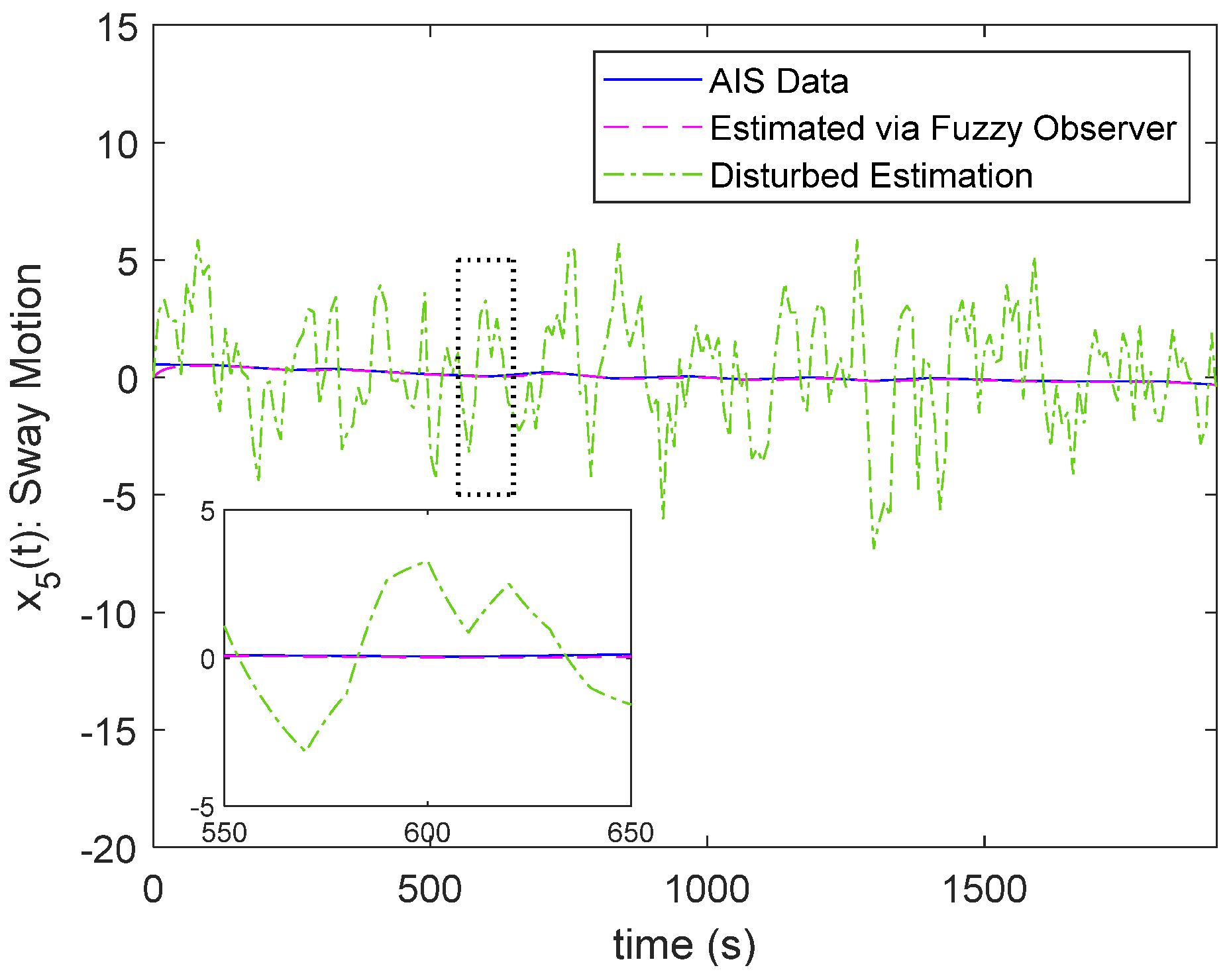
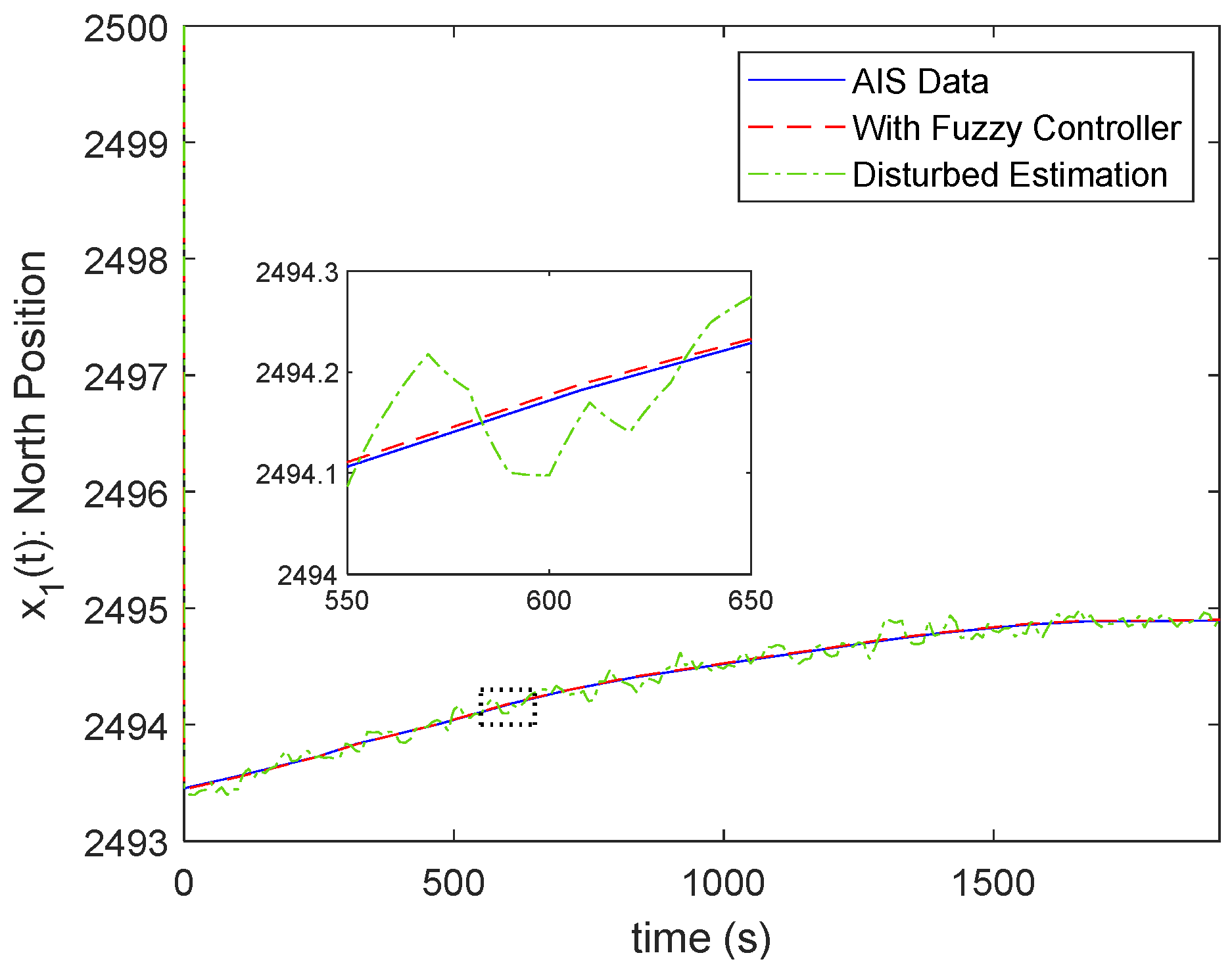
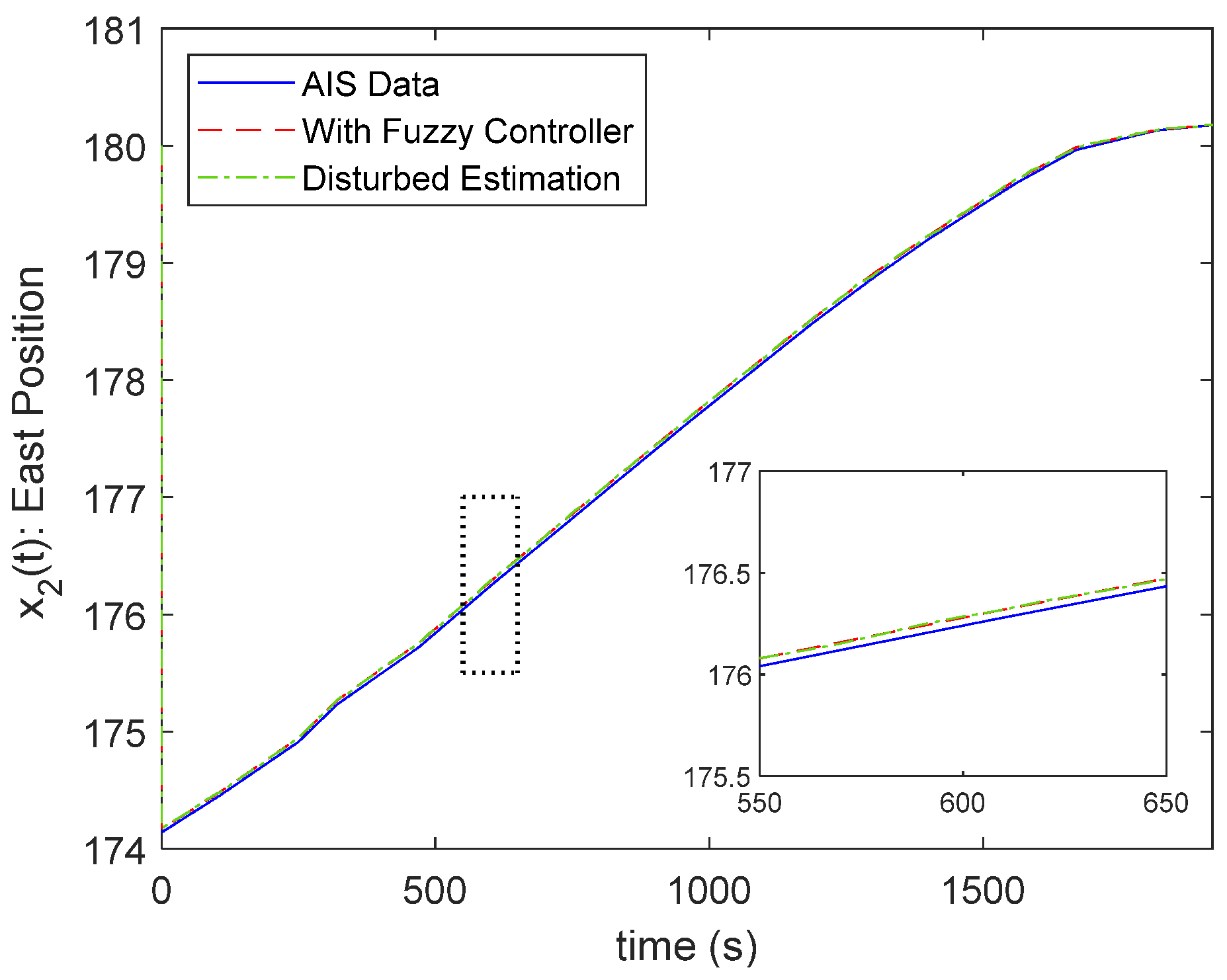
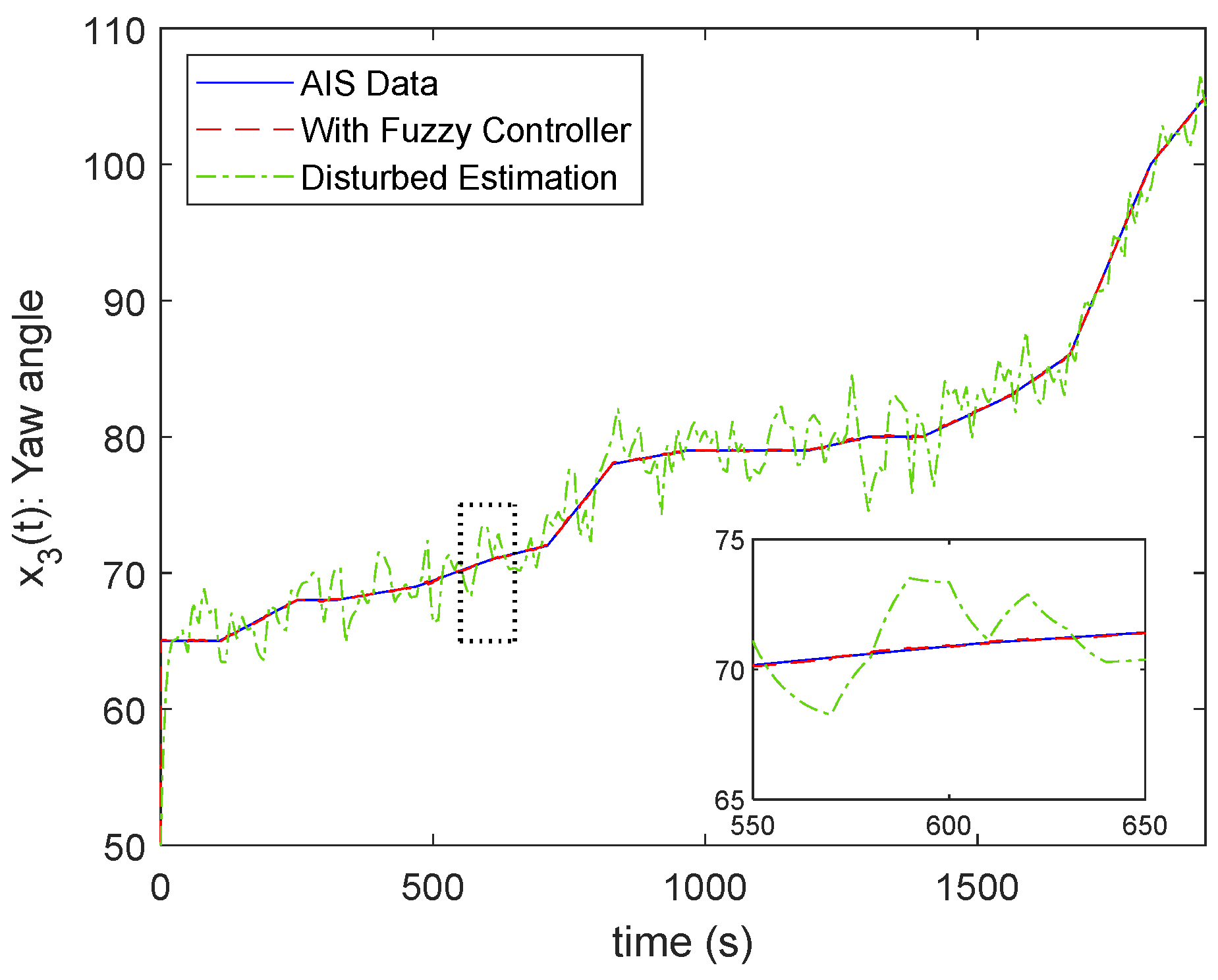
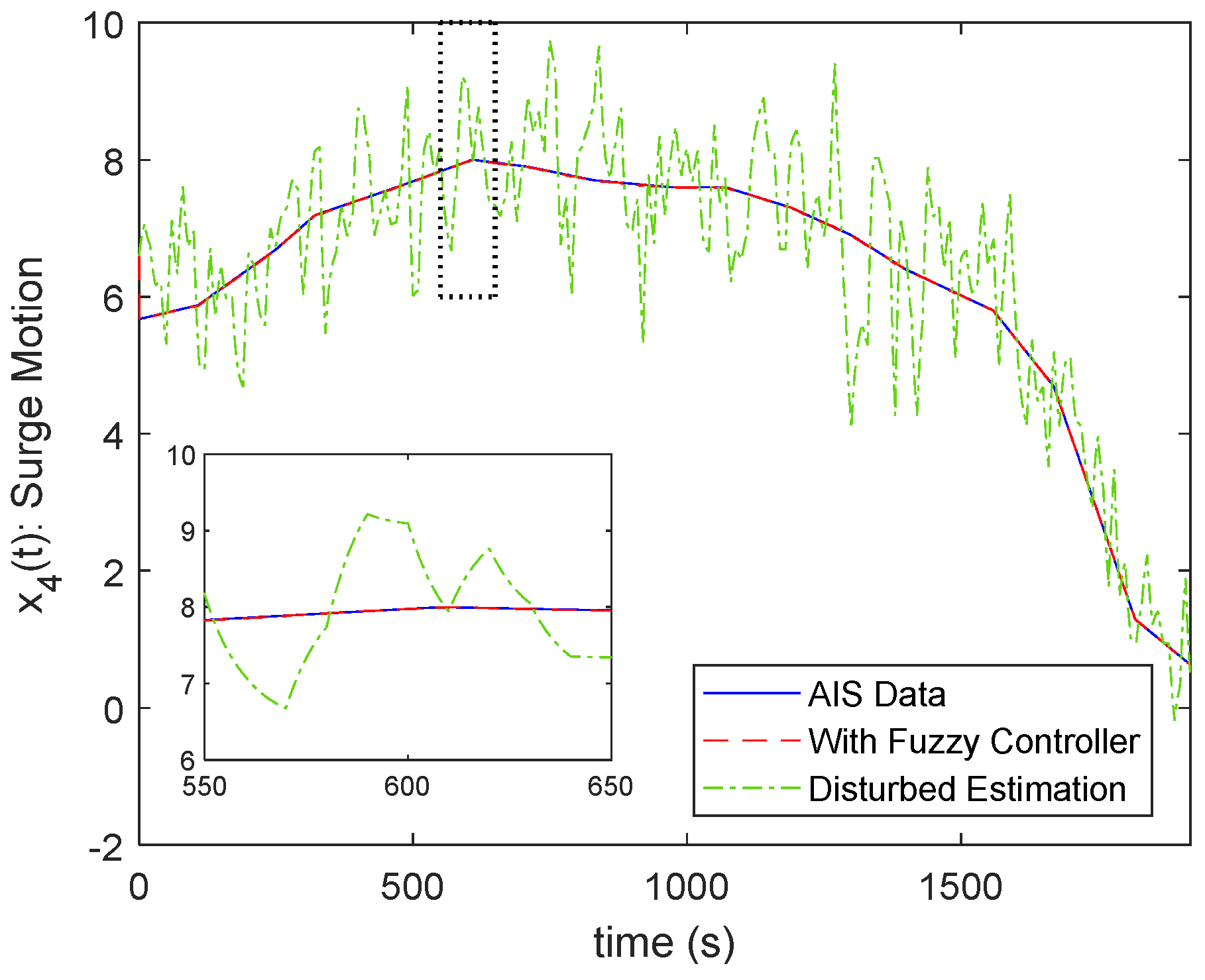
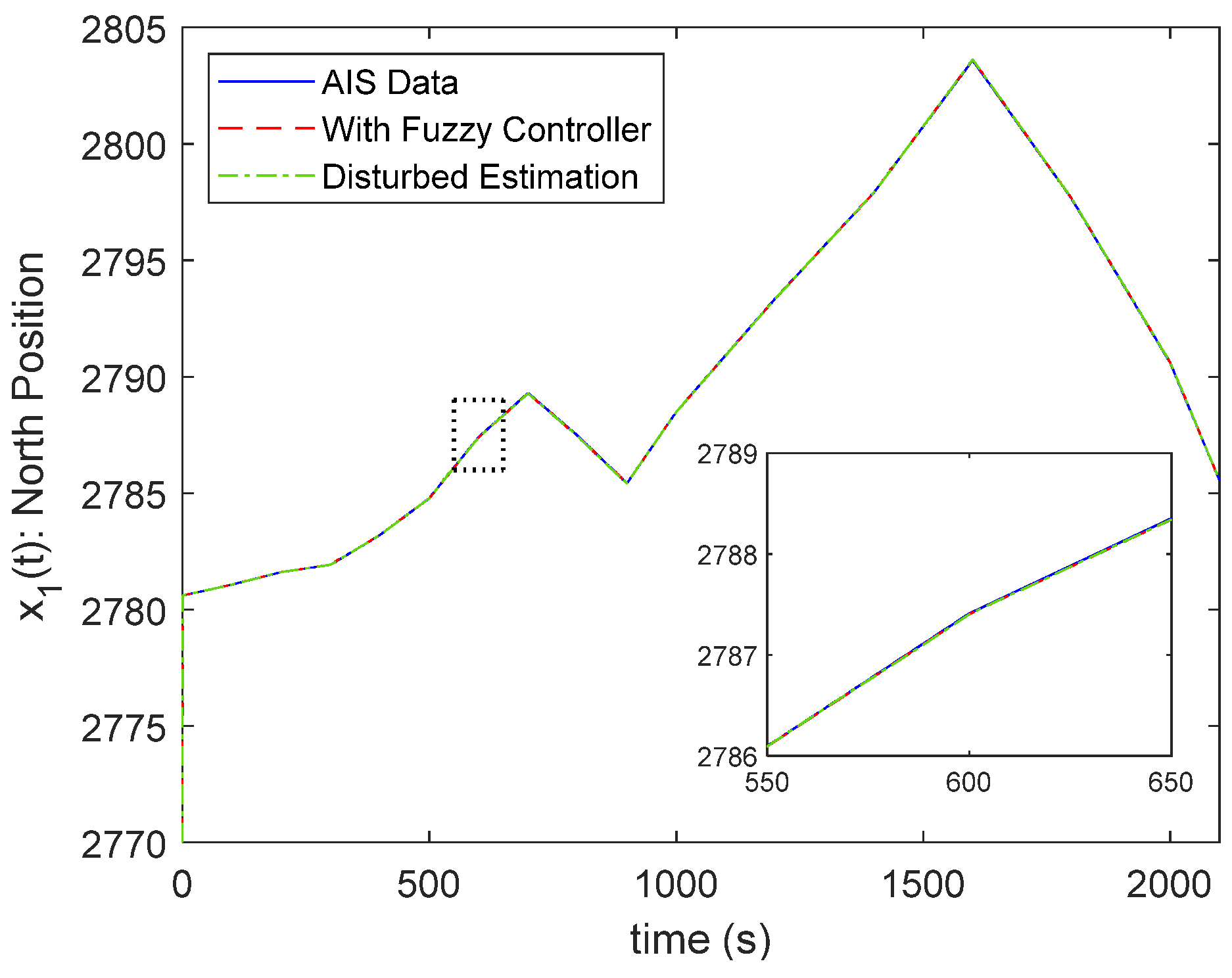
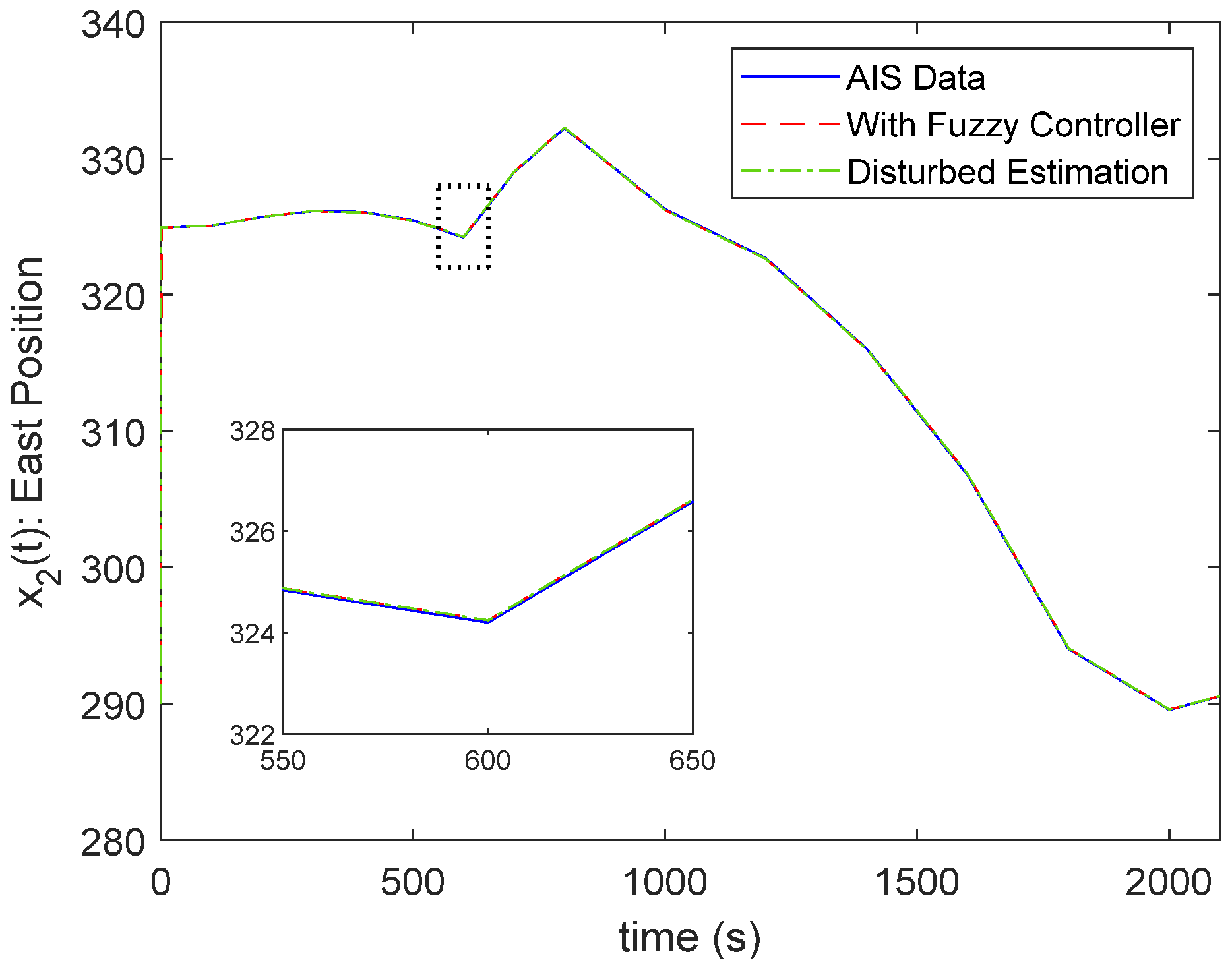
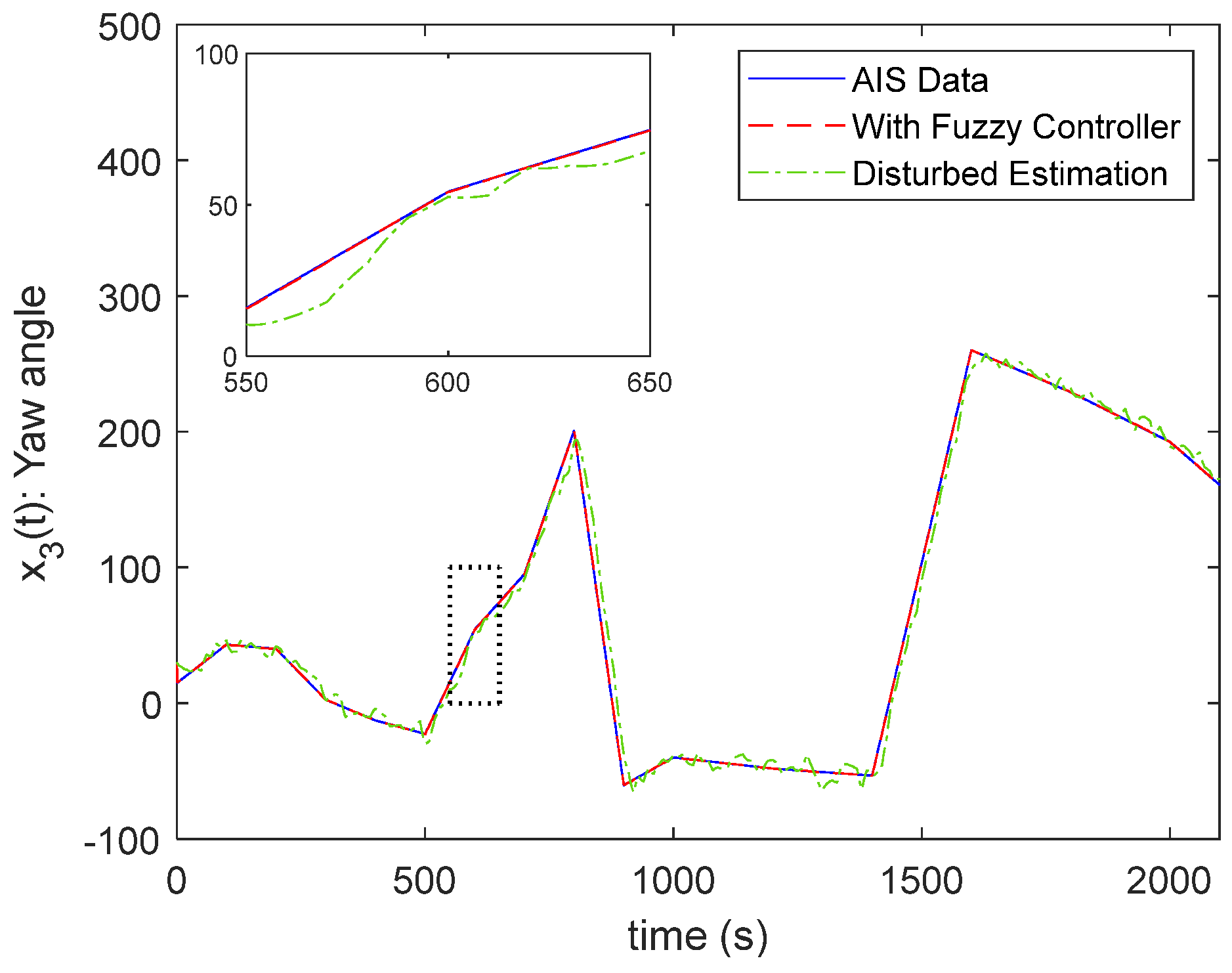
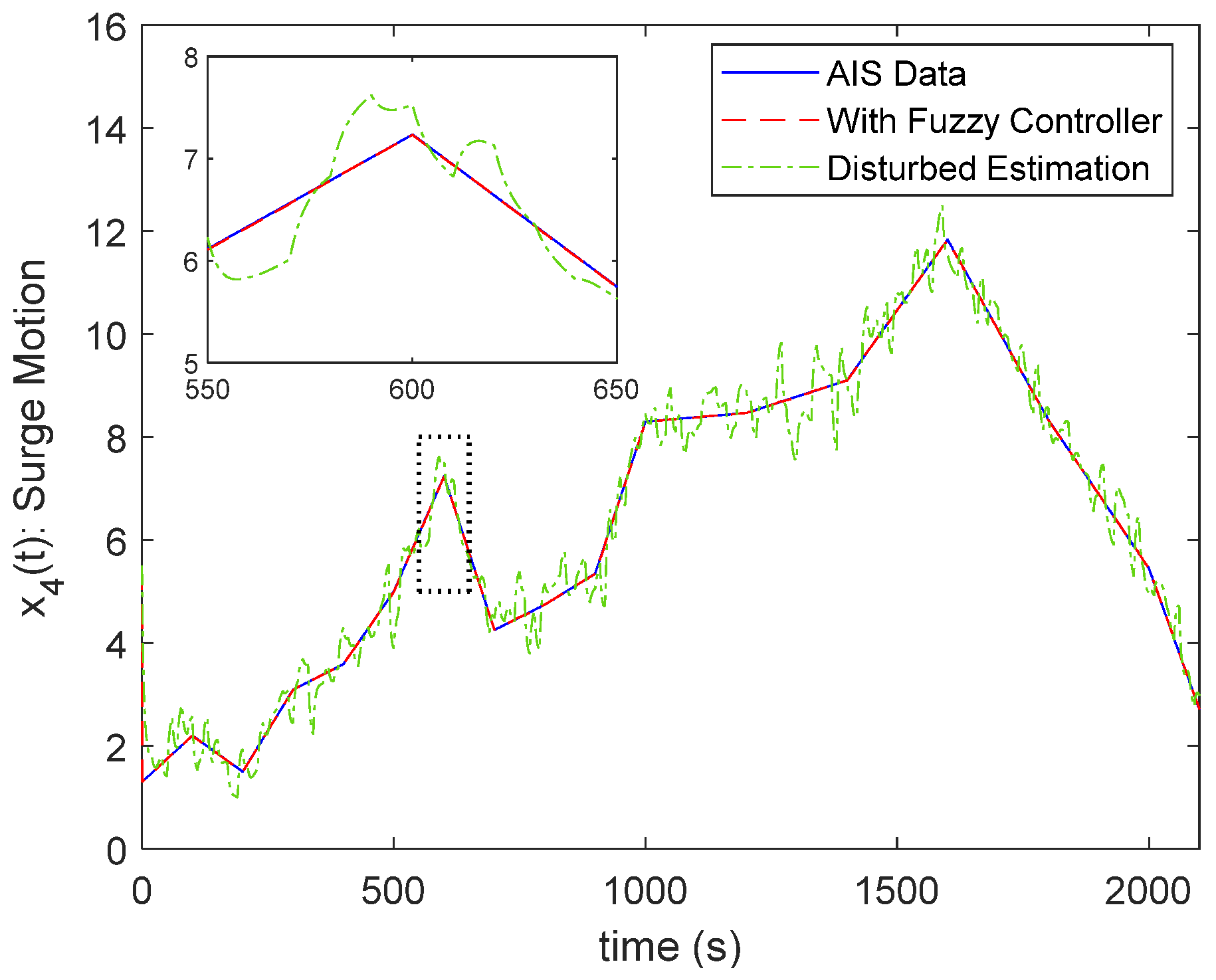
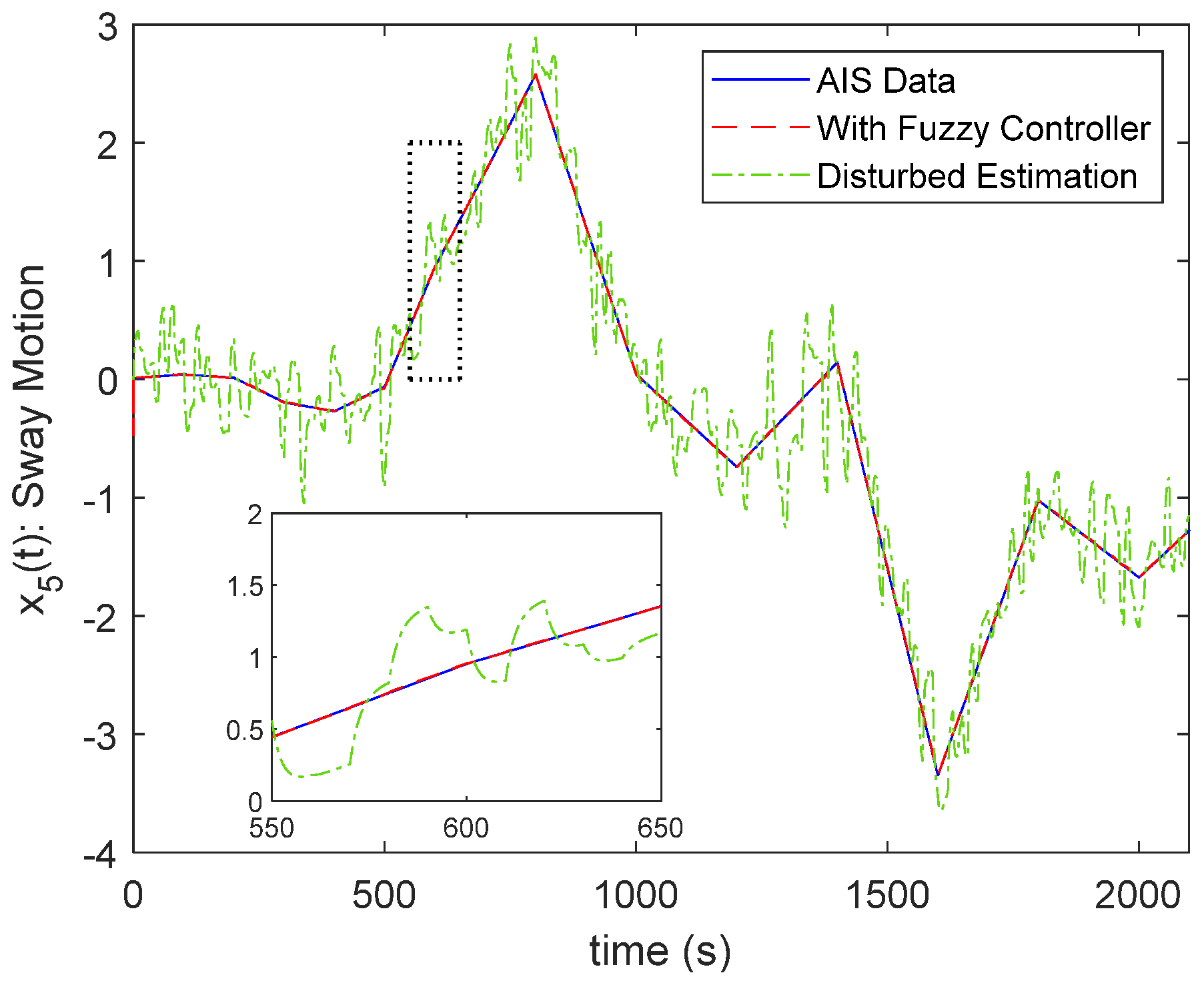
From
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9, one can see that via the gain design algorithm in [
21], fuzzy observer (9) can provide good estimation performance when the ship dynamic behavior based on AIS data is not affected by the disturbance. However, the responses denoted by the green dash–dot line indicate that the estimation results will become terrible if the ship’s dynamic behavior is disturbed.
In this simulation, the situation of stochastic disturbances is selected as follows:
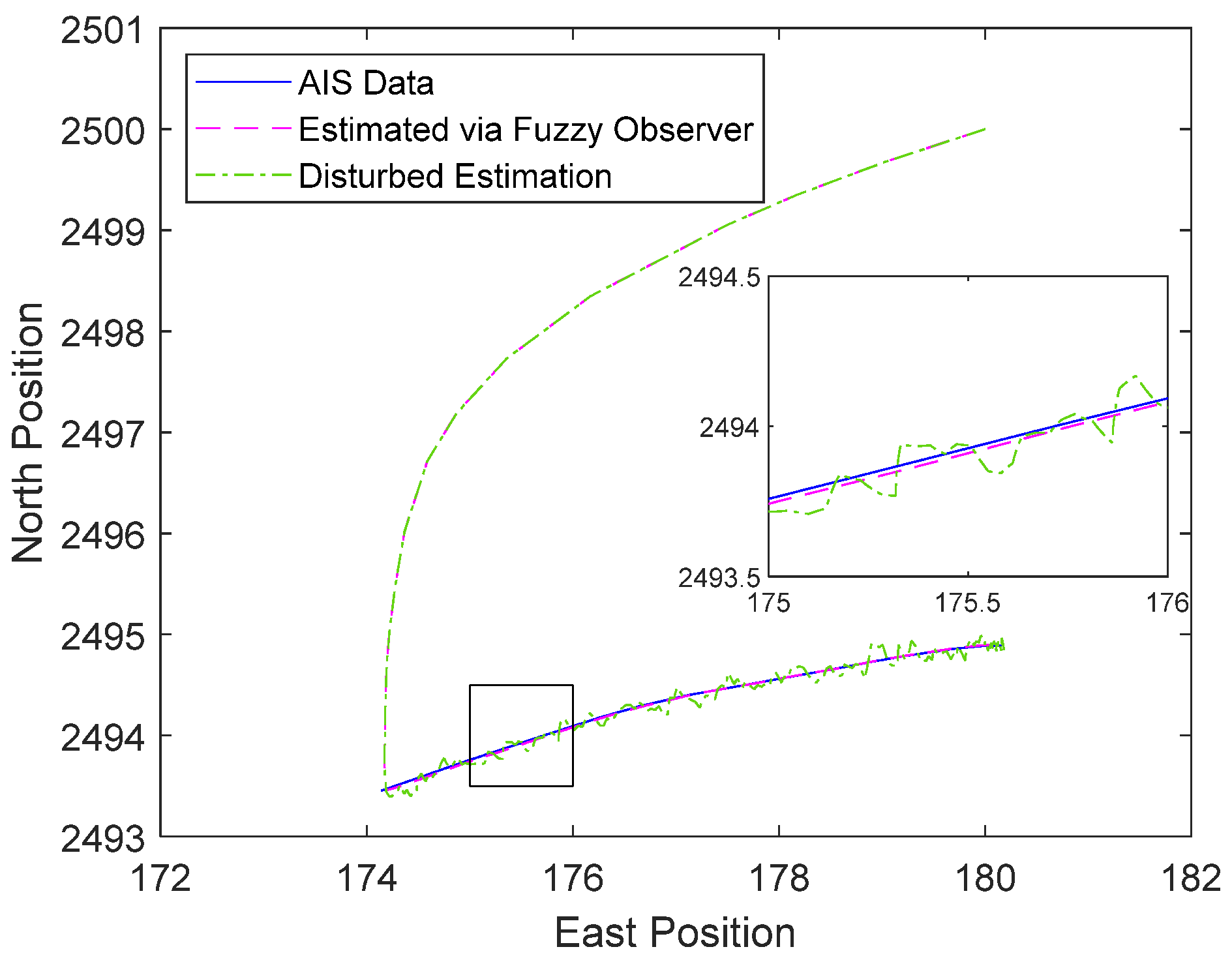
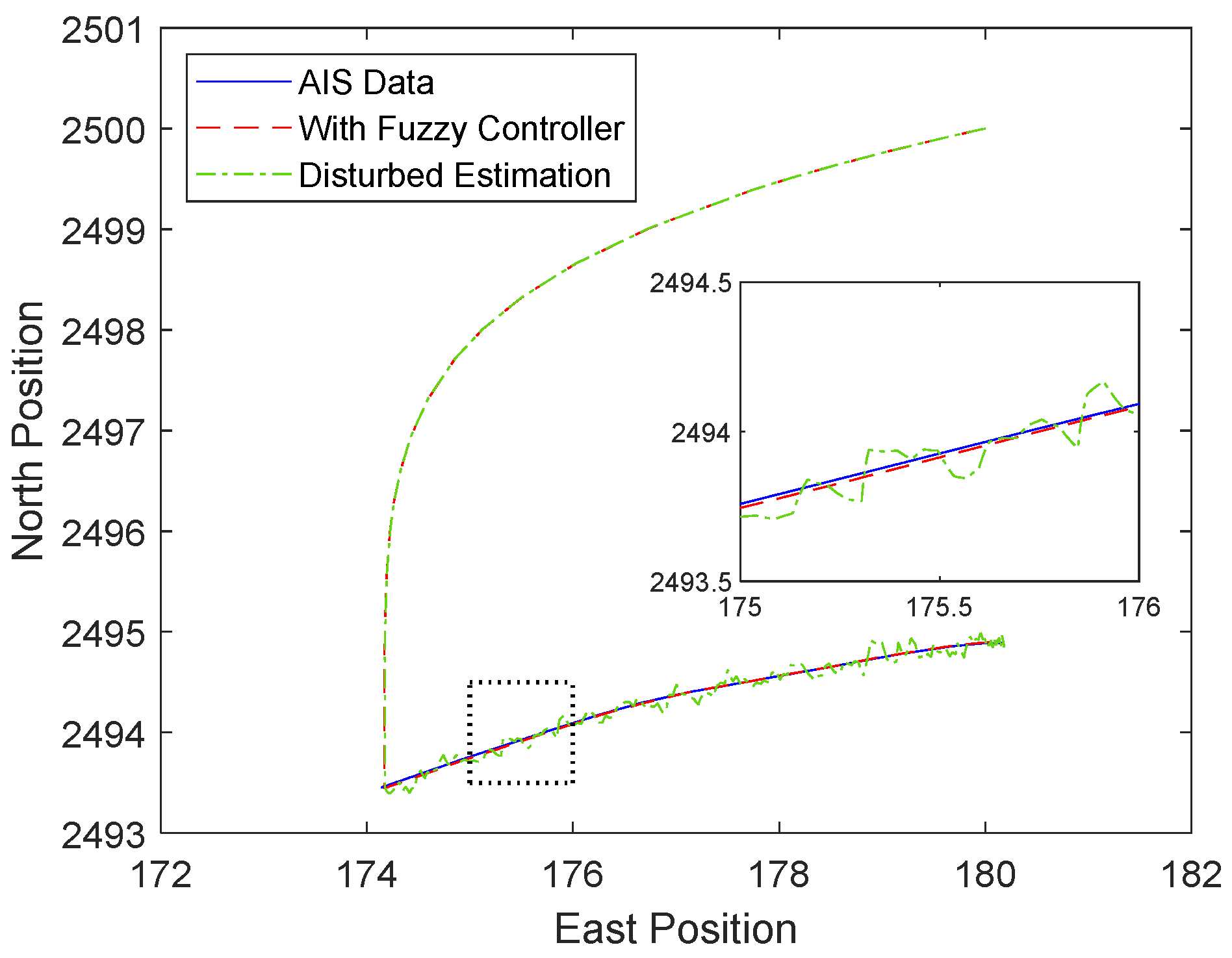
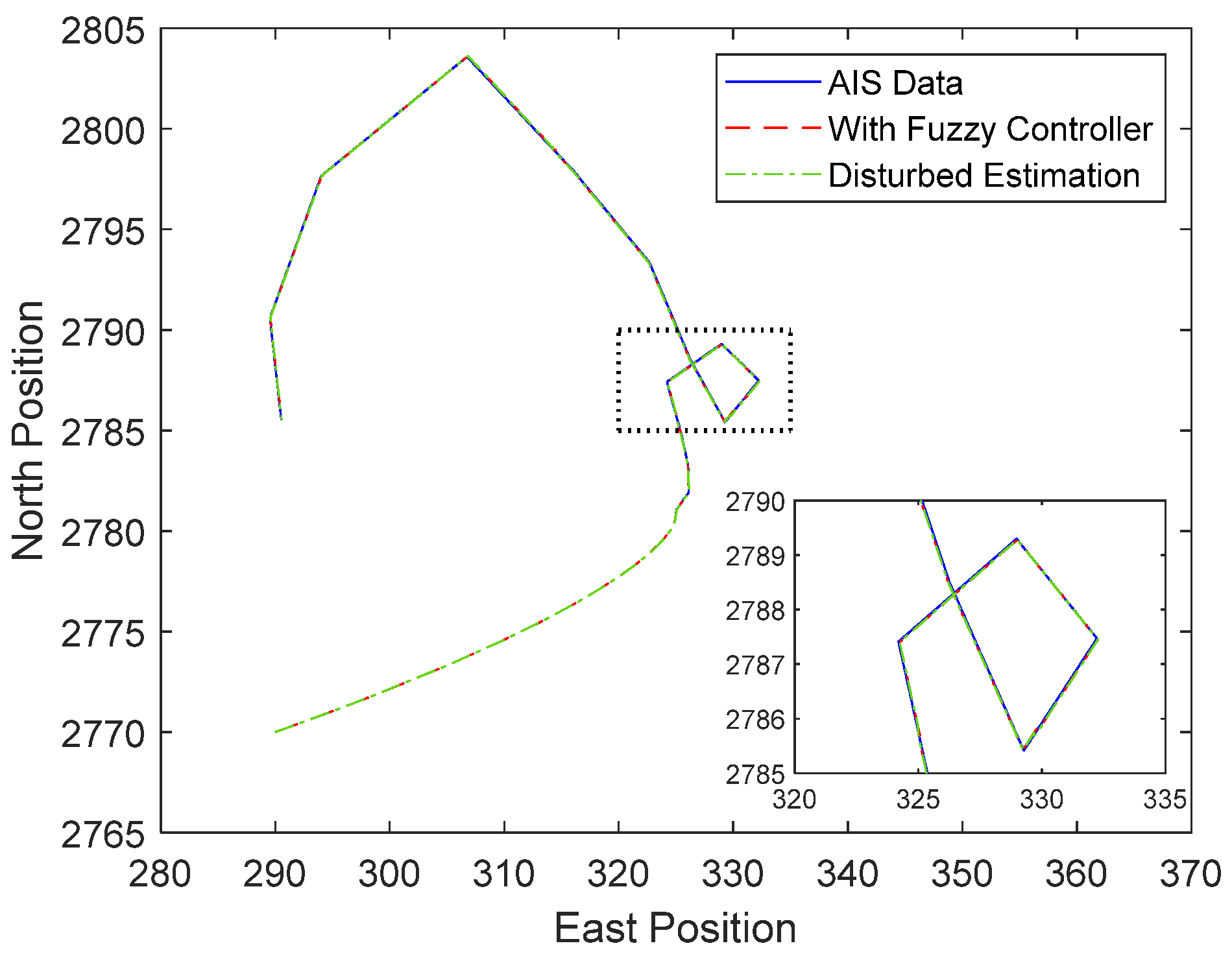
In
Figure 9, the estimation result of the ship dynamic path is presented based on the problem stated in
Figure 2. Obviously, the ship trajectory cannot be precisely estimated because of the stochastic disturbance. This will lead to inaccurate results no matter the analysis or management method of ship traffic. It is worth noting that the effect of stochastic disturbance is very small in
Figure 5 because of the large observer gain designed by the algorithm in [
21] to achieve the required estimation performance. In addition, the large gain is due to the significant variety in the east position of AIS data presented in
Figure 3. However, if the gain of all states is designed to simultaneously achieve the purpose of estimation and solve the disturbance problem, all the gains will become very big which is not proper for designing the fuzzy observer.
Because of this reason, the fuzzy controller design approach proposed in this research can not only provide a control method for the ship dynamic path based on AIS data, but it can also be applied to improve the estimation results even when affected by stochastic disturbance.
Based on extended fuzzy observer (15), gains (25), and the individual variance constraints designed as:
the control gain of all rules of fuzzy controller (14) is obtained as follows by solving the sufficient conditions (20)–(22) in Theorem 1.
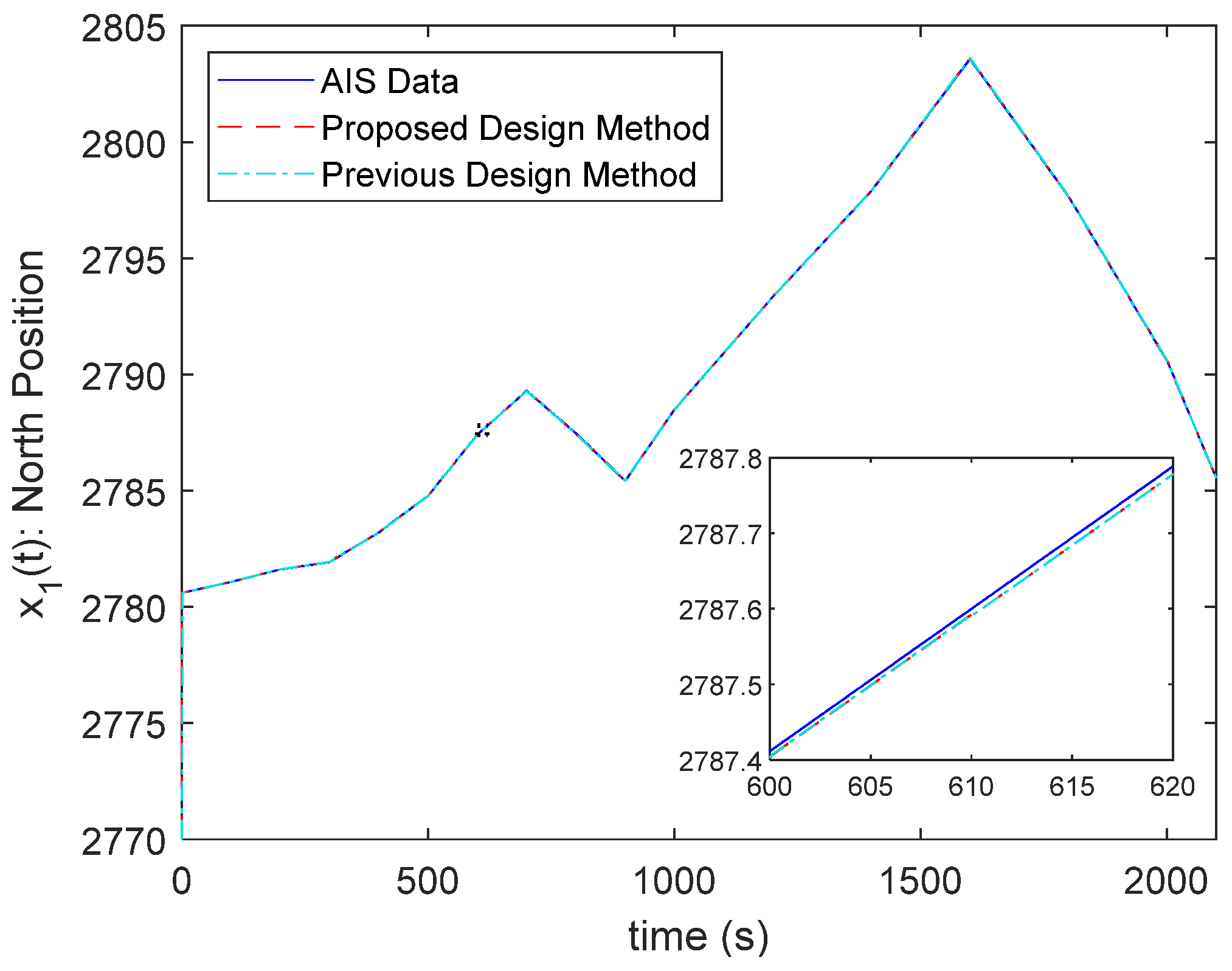
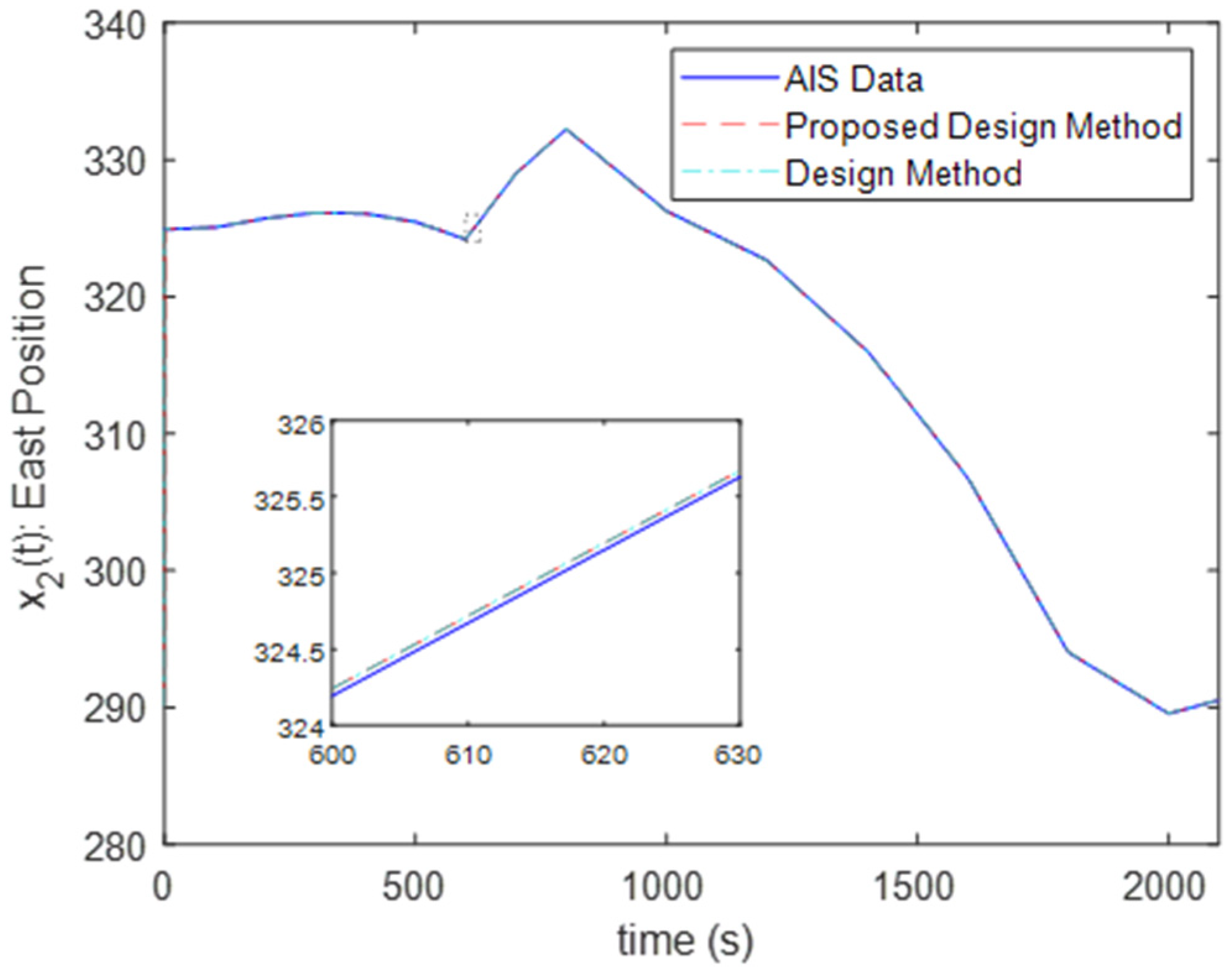
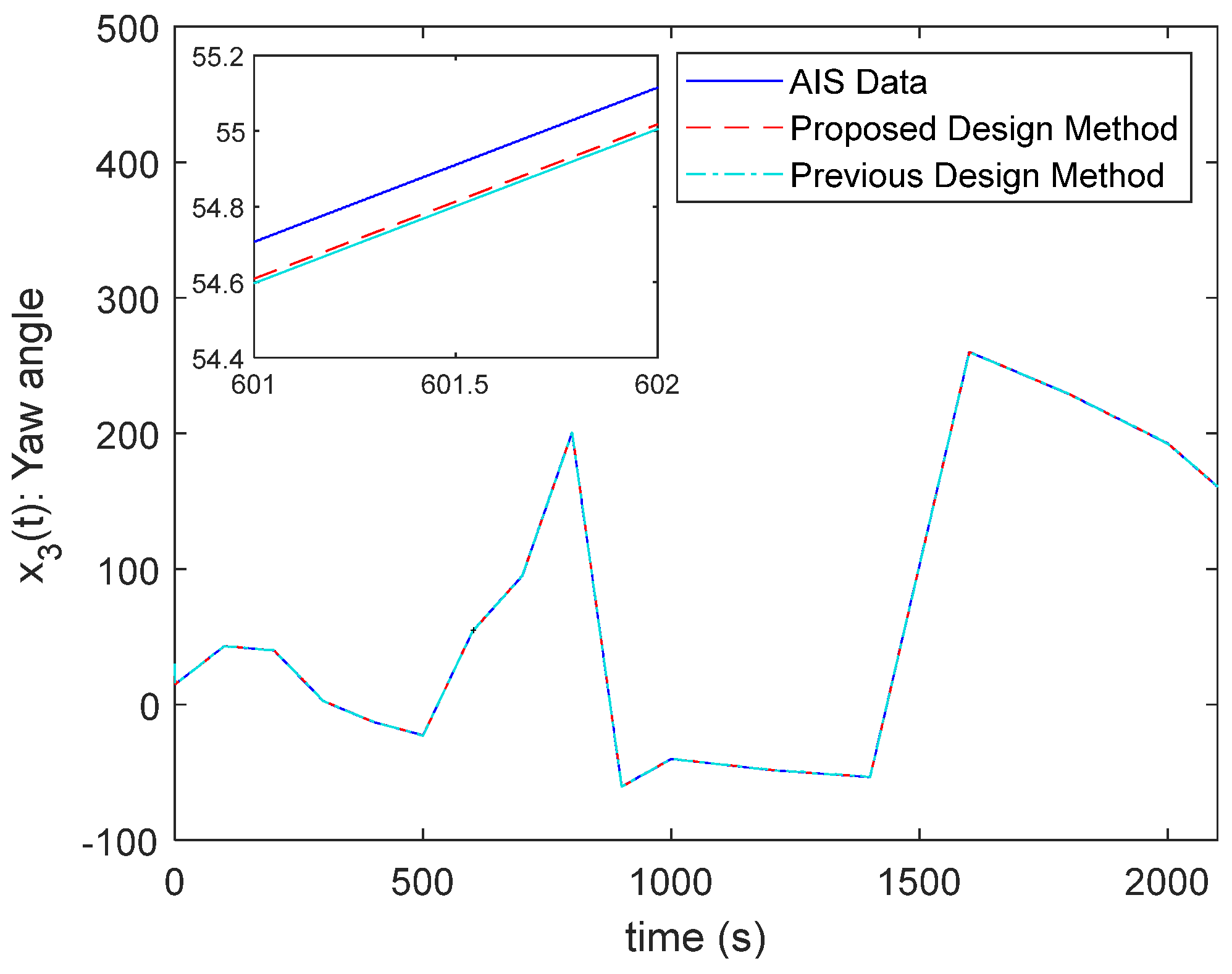
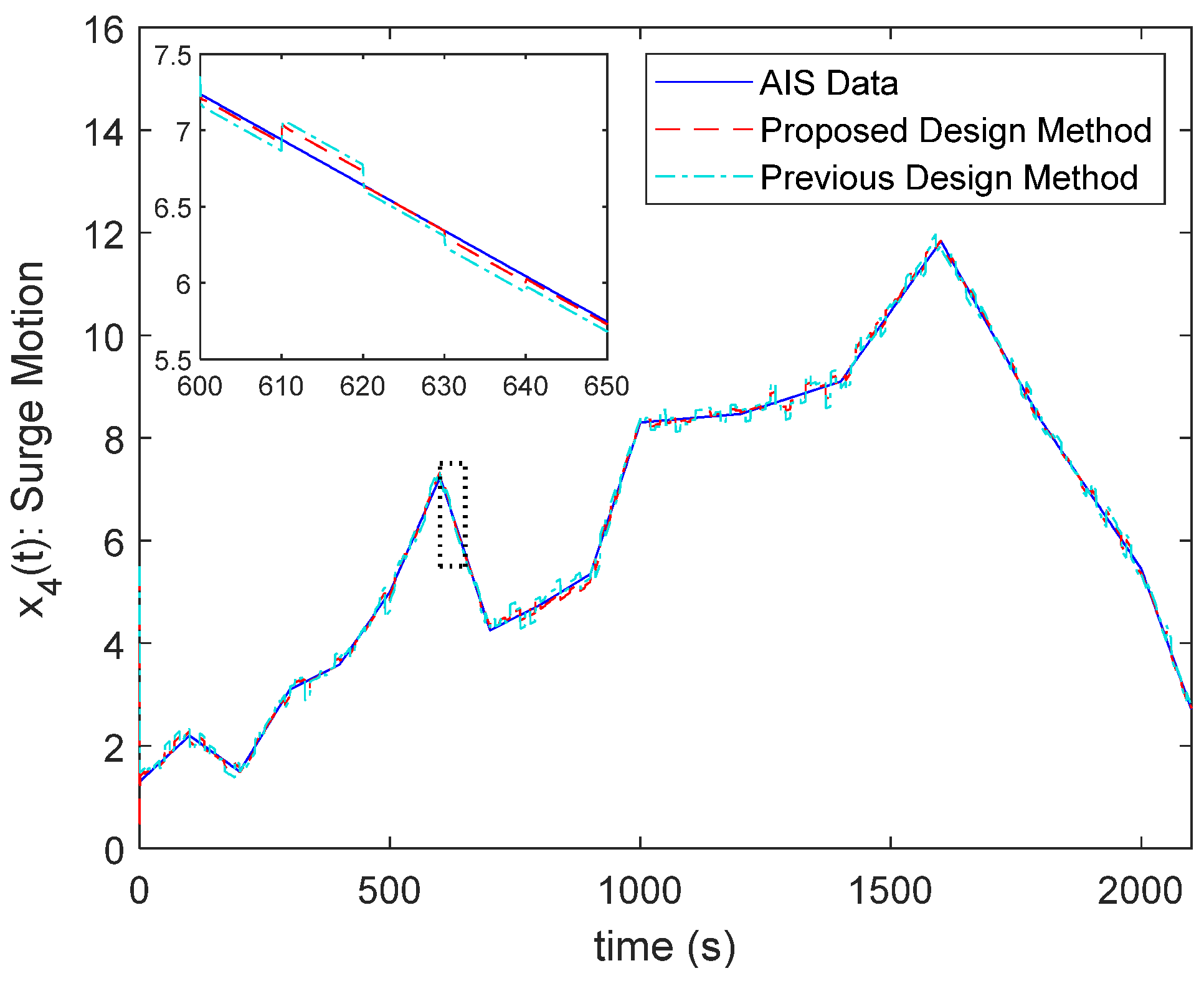
Fuzzy Control Gains in Example 1: Obviously, the estimation performance can be obtained well via the fuzzy controller designed in this research in
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
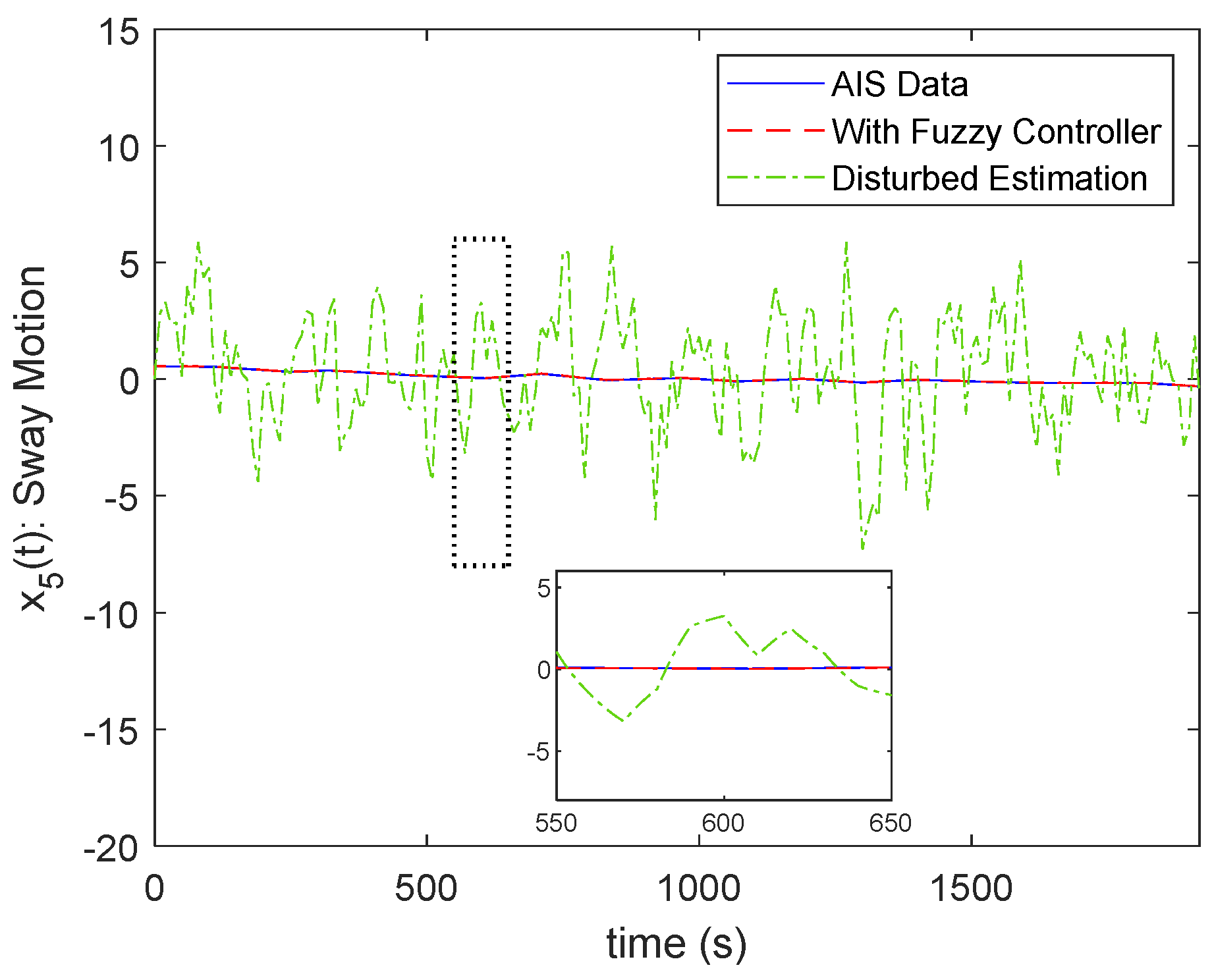
Figure 15. In addition, the effect of stochastic disturbances is efficiently suppressed by the application of individual variance constraint. It is also worth noting that the estimation performances for yaw angle, surge, and sway motion in
Figure 12,
Figure 13 and
Figure 14 are obtained even better than the original results of the fuzzy observer without considering the disturbance in
Figure 6,
Figure 7 and
Figure 8.
Comparing the results of (30) with the variance constraints (28), one can see that all the variance values of estimated error satisfy the given constraints. Via designing the proper variance constraint in the design approach of Theorem 1, the effect of stochastic disturbance can be effectively suppressed such that more precise estimation results of ship dynamics are obtained.
It can be concluded from the simulation of Example 1 that the fuzzy controller design approach proposed in this research can solve the estimation problem of the ship’s dynamic path based on AIS data with the disturbance factors. Moreover, the original estimation performance of the fuzzy observer designed via the algorithm in [
21] can also be improved whether the stochastic disturbances are affecting it or not. When a ship is navigating the ocean in different regions, the ship’s dynamic behavior will be affected by various kinds or magnitudes of disturbance. However, the estimation problem can also be solved by properly adjusting the variance constraint for the estimated error energy of AIS data in the fuzzy controller design approach proposed in this research.
In the next example, the assumed AIS data around Keelung Port, which have a larger variety, were selected to demonstrate the effectiveness of the proposed design approach.
4.2. Example 2 (Simulation of The Assumed AIS Data from Keelung Port)
To make the estimation problem more difficult, the assumed longitude and latitude AIS data of ships around Keelung Port which has the larger variety are selected. The ship positions are presented in the following figure to clearly state the estimation problem.
According to the problem in
Figure 16, the five AIS data are presented in the following table, which has been transferred via the projection method for TWD97 [
40].
Then, the following observer gains can be designed for the fuzzy observer (9) via the algorithm in [
21], which the discrete-time AIS data also constructed into continuous time by first-order hold:
From the values of (31), one can see that the gains are almost bigger than the gains of (25) because the variety of all states of objective AIS data in Example 2 is much larger.
Considering the situation of stochastic disturbances as:
and selecting the variance constraint for estimated error of each state as:
the following gains can be obtained by the design approach in Theorem 1.
Fuzzy Control Gains in Example 2:
Applying fuzzy observer (15) with fuzzy controller (14) according to the gains (31) and (34), the estimation results of Keelung port AIS data are presented in
Figure 17,
Figure 18,
Figure 19,
Figure 20,
Figure 21 and
Figure 22 with the initial condition
.
From the results in
Figure 17,
Figure 18,
Figure 19,
Figure 20 and
Figure 21, one can see that the estimation problem is well solved via the T-S-model-based fuzzy observer with the application of the PDC-based fuzzy controller. Even if the ship’s dynamic behavior is affected by the stochastic disturbance and the assumed AIS data around Keelung Port are selected to be more divergent, the fuzzy controller design approach proposed in this research can also provide a sufficient ability in improving the estimation results. Based on the results in
Figure 17,
Figure 18,
Figure 19,
Figure 20 and
Figure 21, the variance values of the estimated error of each state are presented as follows:
Comparing the results (35) with the variance constraints (33), it is obvious that the variance values of each state are all satisfying the required constraint individually. Via giving the variance constraint in the design approach of Theorem 1, the effect of stochastic disturbances, which is considered different from Example 1, can also be suppressed. To demonstrate the contribution of the proposed design method to the estimation problem of the ship dynamic path based on AIS data, the simulation results compared with [
21] are presented in the next example.
4.3. Example 3 (Comparison Results Based on the Assumed AIS Data of Keelung Port)
Extending the results obtained in Example 2, the comparison results in this example are provided with the same AIS data as
Figure 16 and
Table 4 from Keelung Port. According to the statement in Remark 2, one can know that the observer gain may be improperly big when the approach in [
21] is directly applied to solve the estimation problem under the effect of stochastic disturbance. However, the fuzzy controller design approach proposed in this research can not only provide a controller design scheme for the ship dynamic path based on AIS data, but it can also be utilized to improve the estimation performance in accordance with the disturbance. Because of this reason, the conditions of stochastic disturbance are selected for the simulation as follows.
Note that the magnitude of stochastic disturbance effect (36) is considered in a much bigger case than (32) in Example 2 to verify the effectiveness of the proposed fuzzy controller approach. Then, the following variance constraint is selected to achieve the required estimation performance for each state:
From the value of the variance constraints in (17), it can be seen that the first two constraints are selected in the relatively bigger values because the disturbance only directly influences the yaw angle, surge motion, and sway motion. Based on the given variance constraints (37), the following control gains are obtained by solving the sufficient conditions (20)–(22):
Fuzzy Control Gains in Example 3: Moreover, the observer gain is obtained via directly applying the algorithm proposed in [
21] to solve the disturbance problem in the estimation problem:
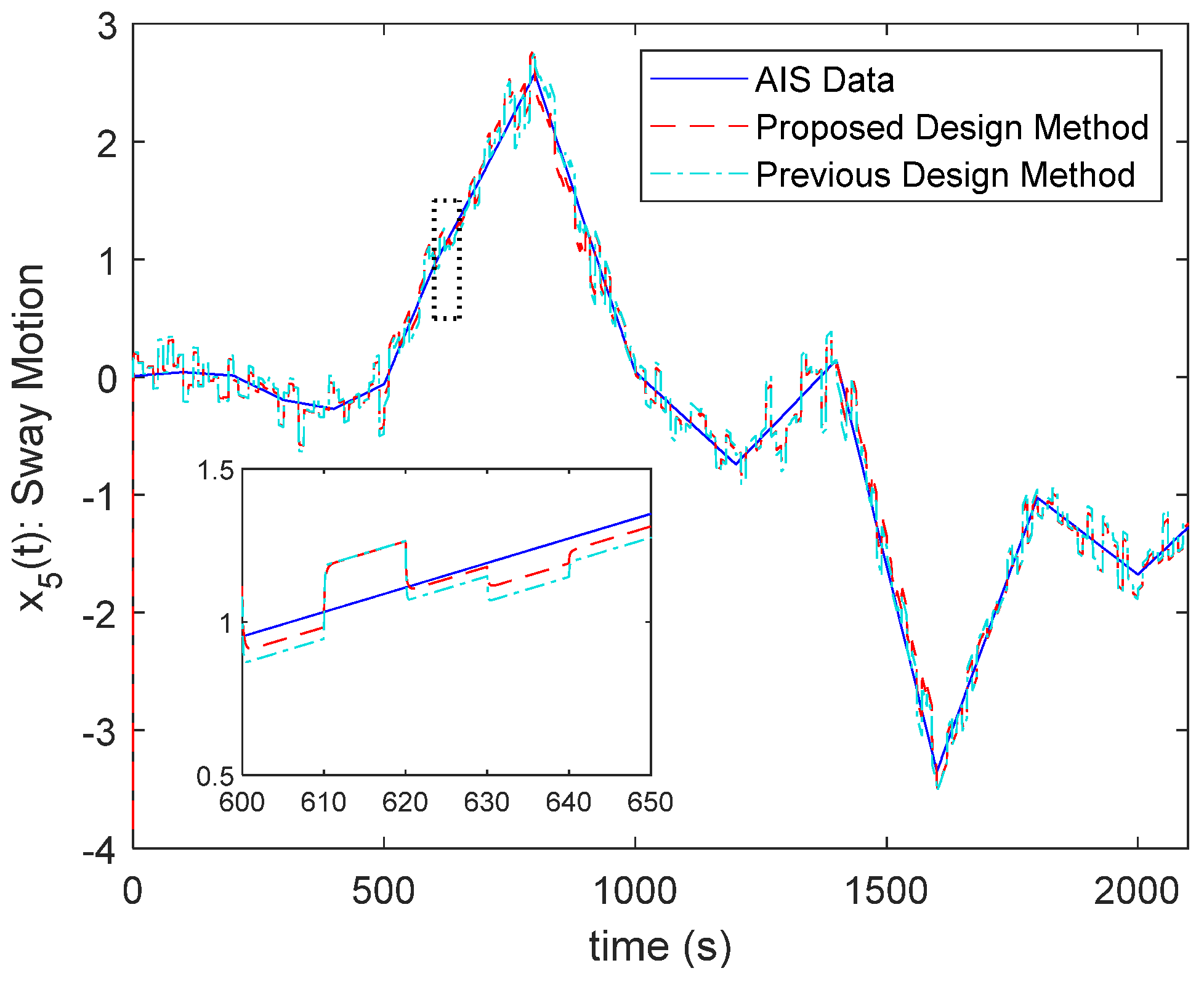
From the results of
Figure 25,
Figure 26 and
Figure 27, it is obvious that the proposed fuzzy controller design approach can improve the estimation performance compared with the design method in [
21]. It is worth noting that the value of the observer gains is designed to be a bigger value than the control gains (38) if the algorithm proposed in [
21] is only applied. To clearly present this contribution, the matrix related to the control effort of the rule 1 subsystem in the error system (16) is obtained, for example, to compare with the gains (39).
In the gain matrices (40), the matrix
denotes the original observer gain matrix with the gains (31), which is designed without considering the effect of stochastic disturbance. In addition, the matrix
denotes the adjusted observer gain via the gain design algorithm in [
21]. Alternately, the proposed fuzzy controller design approach was applied in this research to complement the estimation performance with disturbance. From the gain values in (40), it is not difficult to see that the magnitude of the gain designed by the proposed method is smaller than that designed by the method in [
21]. On top of that, the better estimation performance in
Figure 25,
Figure 26 and
Figure 27 can even be obtained by the proposed design method. And the effect of stochastic disturbance is very inconspicuous in
Figure 23 and
Figure 24 because of the original gains in (31) are designed in the relatively larger values to achieve the required estimating performance for the north position and east position. To further verify the contribution of the design method in this research, the following variance values are presented according to
Figure 23,
Figure 24,
Figure 25,
Figure 26 and
Figure 27:
Design Method in [21]:
where
denotes the variance value of
.
Via comparing the values of (41) and (42), one can see that the estimation error of yaw angle, surge motion, and sway motion all achieve lower variance values. This also means that the proposed fuzzy controller design approach can guarantee more precise estimation performance. Additionally, the lower gains were also designed by the proposed design approach such that the cost of estimation in practical applications can be efficiently saved. Therefore, the effectiveness of the proposed fuzzy controller design approach was demonstrated for estimating the dynamic ship path based on AIS data.
According to the estimation results of the simulation in the three examples, it can be said that the fuzzy controller design approach in this research can provide a good choice to improve the estimation performance no matter with or without stochastic disturbances. Moreover, the design approach in this research can also be further extended to the general control problem of the ship dynamic path based on AIS data according to the setting in Remark 3.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}