The FW–H model can be used to calculate far-field acoustic signals, which are extended from the near-field flow data obtained via CFD. This model predicts the small-amplitude sound-pressure fluctuations at each receiver location. Therefore, the flow around the noise source is the basis of the acoustic calculation. For STAR-CCM+ software, following the analysis and calculation of hydrodynamic characteristics, the transient surface data file generated during the previous transient operation must be imported. Then, FW–H is used to carry out the next calculation. In this section, based on the hydrodynamic calculation and FW–H equation, the underwater-radiated noise of the propeller and submarine under self-propulsion is investigated.
4.1. Propeller Noise in Open-Water
For the E1619 propeller and its open-water performance prediction, a transient calculation is carried out. The area containing the propeller is regarded as the noise source, and several hydrophone receiver positions are defined. In the calculation, the time step is adjusted according to speed. Differing from the hydrodynamic calculation, the rotation angle at each time step changes from 1 to 0.1°, and the specific time step is 2.31 × 10−5 s. Other settings include the general configuration of sound velocity in water and that of the hydrophone positions, which must be adjusted according to the different model characteristics.
When
J = 0.74, the propeller rotates in the open-water environment. Radiation noise under this condition has been widely studied (Brentner and Farassat [
25]; Frota et al. [
26]; and Marinus et al. [
27]).
Table 6 shows the positions of hydrophones during propeller noise calculation. The coordinate system is the local one established with the center point of propeller disc as the origin and the propeller axis direction as the
x-axis.
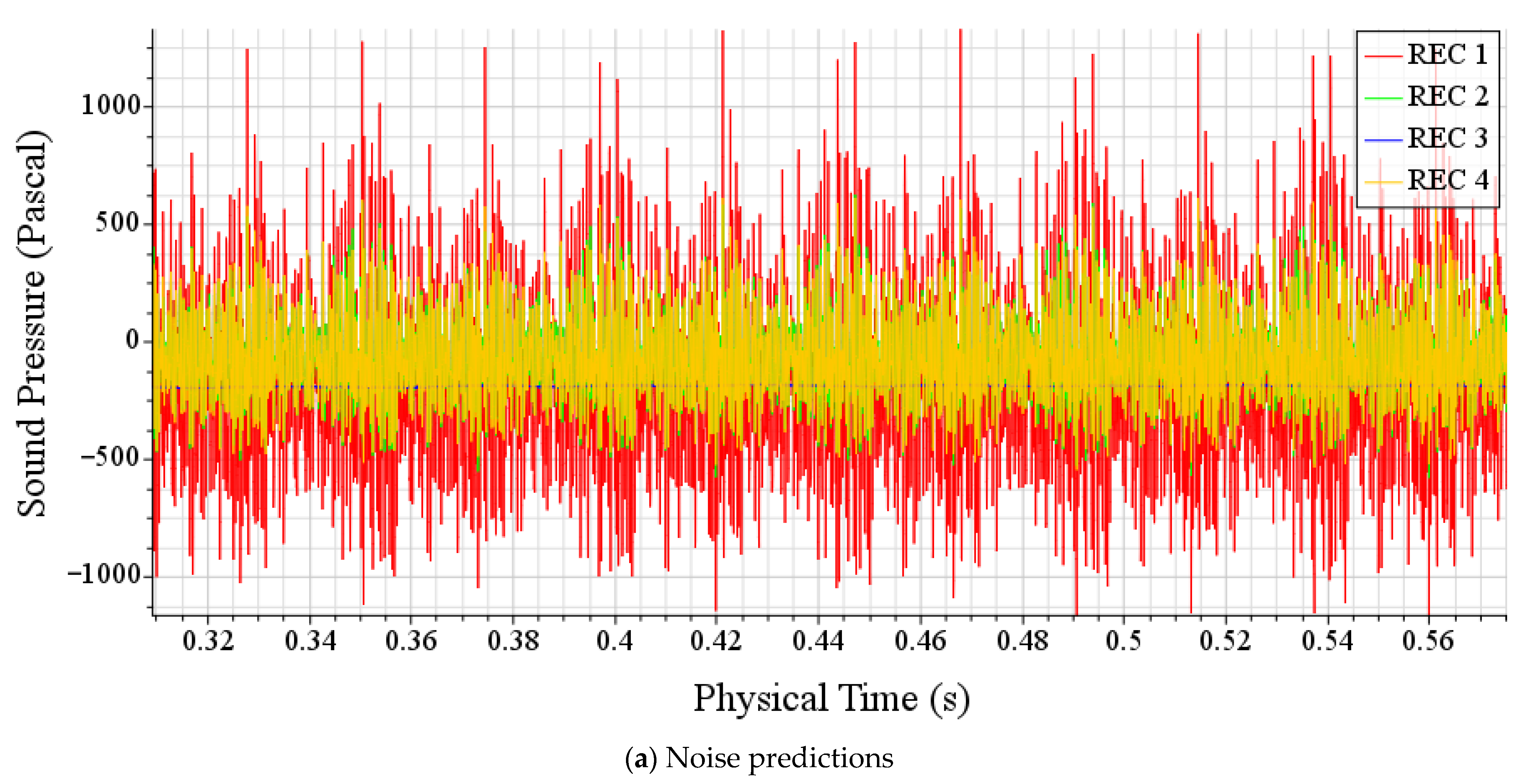
The noise calculations of the four hydrophones in
Table 6 are shown in
Figure 10a. After reaching a steady state, the detected sound-pressure pulse in 0.3–0.65 s is the same magnitude, showing a periodic change over time. Then, the data are processed via FFT (reference sound pressure is 10
−6 pa), and the frequency distribution of sound-pressure level is obtained, as shown in
Figure 10b.
As the propeller periodically rotates and when two detection points have the same radial distance from the origin on the YOZ plane, the side hydrophone, REC2, and the upper REC4 are consistent but slightly different owing to the influence of the propeller rotation. Using the process in
Section 2.3, the total noise of each hydrophone position is calculated according to the sound-pressure level, as shown in
Table 7. The results show that the noise of the hydrophone above and on the side of the propeller is larger and similar. The total sound-pressure level of the position of upstream and downstream hydrophones is lower. This shows that the radial noise of the E1619 propeller is higher than the axial noise in this section.
In
Figure 10b, in the low-frequency band below 1000 Hz, peaks are evident at 74, 148, 222, 298, 451 and 667 Hz, but not at the upstream REC1 and downstream REC3. In the high-frequency band, the changing trend and peak position of the four measuring points are similar. In open-water, the basic frequency is the blade-passing frequency (BPF), which is 75 Hz (the product of rotation speed and blade number, 10.71 × 7 = 74.94). The frequency positions of several peaks in the low-frequency band are 74, 148, 222, 298 and 451 Hz: the positions of multiple BPFs.
To more intuitively analyze the change in sound-pressure level against frequency, the third octave band is calculated using the formula in
Section 2.3 from the continuous fluctuation data of sound-pressure level of each hydrophone, as shown in
Figure 11. Referring to
Figure 11, the energy of the propeller noise is mainly concentrated in the high-frequency band above 1000 Hz, reaching a peak value in the frequency band of 2500–3000 Hz, which is similar to that found by Özden [
28]. In the low-frequency band below 1000 Hz, the sound-pressure level and the distribution of hydrophones at different positions are quite diverse. The difference of trends in sound-pressure level in the high-frequency band is very small.
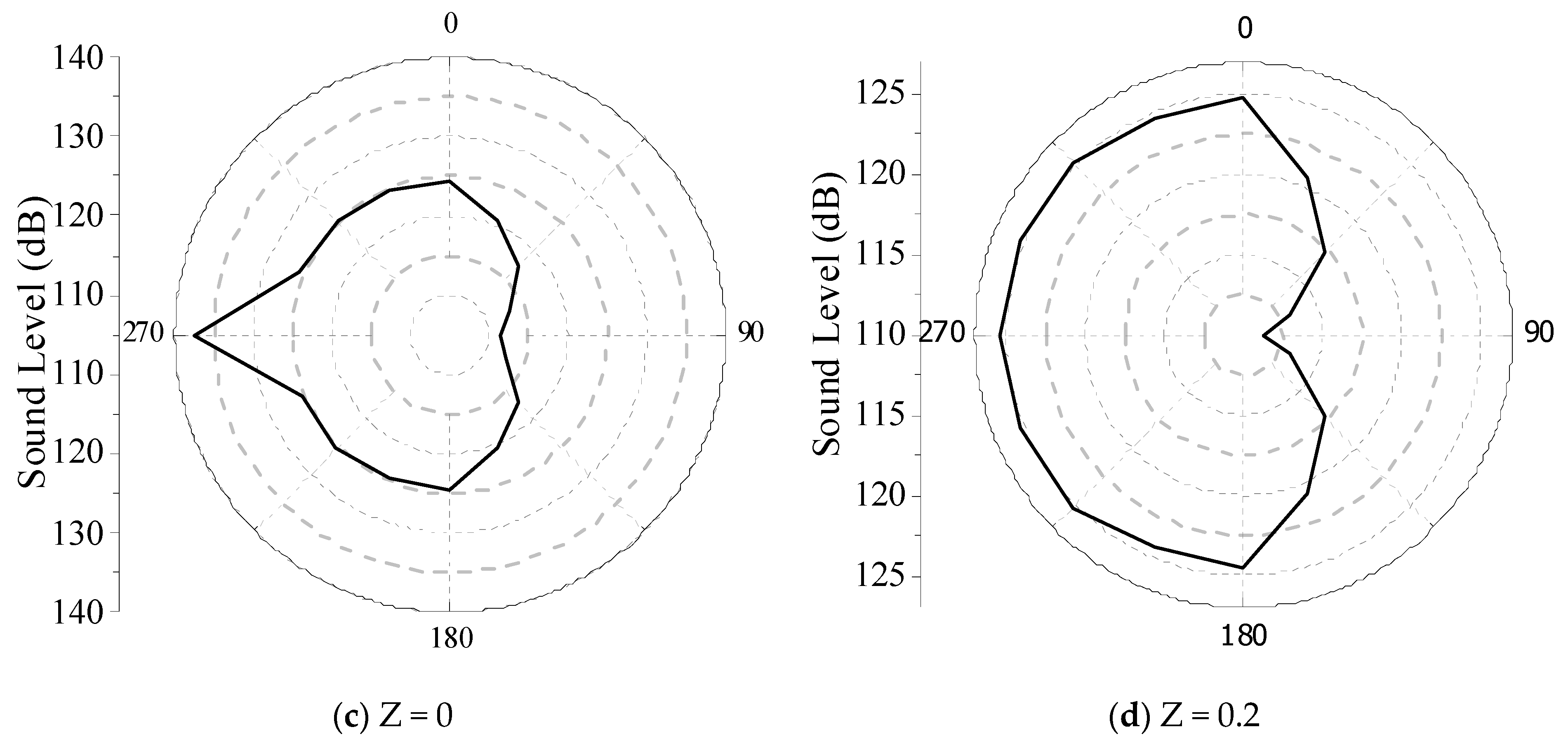
To investigate the propagation characteristics of propeller radiated noise, several hydrophones are evenly distributed at different sections with the projection of the center of the local coordinate system at the center. Sixteen hydrophones are used for each section. After calculating the total sound pressure, a directivity map is drawn, as shown in
Figure 12.
Figure 12a,b shows that, in the plane parallel to the propeller disc, the noise propagation pattern of the propeller is basically the same along the circumferential direction. A circle indicates that the radial propagation amplitude of the noise is almost the same. There is a certain degree of attenuation when the noise propagates along the downstream axis, which is consistent with the theoretical prediction.
Figure 12c,d shows that the radiation noise in the upstream and downstream of the propeller is relatively low. Compared with the two figures, the noise attenuation along the radial propagation can also be observed. However, compared with
Figure 12a,b, the attenuation degree of noise in the radial propagation of equal distance is less than that of the downstream direction.
As shown in
Figure 12c, when the uniform flow field
J is 0.74, the thickness noise of the E1619 propeller accounts for the main part, and the load noise is smaller than the thickness noise. According to Chang et al. [
29], the directional distribution of noise presents a monopole directivity because the thickness noise is generated by the periodic extrusion or expansion of the fluid caused by propeller rotation. The purpose is not to regard the entire propeller as a monopole sound source, but it is instead to distribute the monopole sound sources to the surface of the propeller blade. Therefore, the directivity of the entire propeller on the circumference perpendicular to the propeller disc is not a uniform circle. It is largest in the direction of the propeller disc and smallest in the direction of the shaft. This is because the monopole sound sources arranged on the propeller blade are distributed along the chord length directly onto the propeller. The axial pressures cancel so that the thickness noise in the axial direction of the propeller is the smallest. Thus, the noise directivity graph has an “8” shape. However, owing to the influence of the shaft, the propeller is not symmetrical front to back, which interferes with this acoustic phenomenon. Therefore, the directional chart does not completely resemble an “8” shape.
4.2. Verification of Noise Calculation
The noise of a five-blade propeller model with a diameter of 0.24 m is simulated, and the results are compared with the experimental results and for verification. The propeller model is shown in
Figure 13 and the grid for calculation is shown in
Figure 14. The grids in the rotating area around the propeller and the wake flow area of the propeller are locally refined. The number of grids is about fourteen million, and the wall y+ is less than one. The propeller speed coefficient is 0.5, rotation speed is 15 rps, and inflow velocity is 1.65 m/s.
The same simulation method of flow field mentioned in the previous section, which is based on the RANS equation and SST k–ω turbulence model, is used. After the hydrodynamic calculation is completed, the FW-H equation is solved to determine the noise.
The position of the hydrophone in the test is 0.6 m away from the center of the propeller in the radial direction. The frequency response range of the hydrophone is 0.1–120,000 Hz. The actual measurement range in the test is 0.1–80,000 Hz. Since the time step is set to 0.00025 s, the upper limit of the corresponding effective frequency is 2000 Hz, and the reference sound pressure is 1 × 10
−6 Pa. Therefore, the test value of 0.1–2000 Hz is selected to compare with the numerical simulation value. The monitoring points are distributed at the same positions as the test hydrophone, and the comparisons between the test values and calculated results are shown in
Figure 15 and
Table 8.
It can be seen from
Figure 15 that the curve trends obtained by the tests and numerical simulation are similar, and the blade frequency information can be observed clearly in the spectrum curve using numerical calculation. However, the blade frequency information cannot be observed clearly with the increase in frequency. The total sound-pressure level at the hydrophone position is shown in
Table 8. The calculation error of noise is within 6 dB. The difference between the total sound-pressure level and the experimental value is not significant, and the reasons for the difference are given below.
(1) The flow-field information collection is different. The thrust torque error between the numerical simulation and test results has a certain influence on the flow field.
(2) The sampling frequency is different; the frequency of numerical simulation is 0—2000 Hz, but the test sampling frequency is 0.1—80,000 Hz.
(3) There is an influence of background noise. Although the experimental values are corrected for the background noise, this influence leads to an error.
Generally, the numerical simulation is in good agreement with the test values, and the few errors are within the acceptable range.
4.3. Submarine Noise during Self-Propulsion
As in
Section 4.1, noise-feature prediction is carried out based on self-propulsion simulation with an inflow velocity of 3.051 m/s and a propeller rotation speed of 10.20 rps. The area, including the propeller body and the hull, is the noise source, and several hydrophones are defined. The calculation mesh and model follow the same settings as that of self-propulsion, whereas the physical model uses the previous RANS unsteady calculation. The time step is the time it takes for the propeller to rotate 0.1°.
Table 9 shows the position distribution coordinates of the hydrophone using the local coordinate system with the center of the propeller disc as the origin. The description of the coordinate position is based on the local coordinate system.
The post-FFT calculations of the sound-pressure level are shown in
Figure 16. There are twelve hydrophones set here. With the center of the propeller disc as the origin, the distances of the near-field, middle-field, and far-field hydrophones are 0.1, 1 and 10 m, respectively. Each distance has four hydrophones, and the distribution is similar to the propeller noise calculation. The noise predictions of different hydrophones are shown in
Figure 16. For the case of a pure propeller, REC2 and REC4 distributions are almost the same. However, owing to the wake of the AFF8 hull, the flow field is asymmetric, and the REC2 and REC4 hydrophones show relatively noticeable diversity in the low-frequency band. The diversity of hydrophones at the same distances at different positions is mainly reflected in the low-frequency band below 500 Hz. Generally, the corresponding noise components of each assessment point decrease with the increase in the hydrophone distance, which is consistent with theoretical predictions.
As shown in
Figure 16a, in the low-frequency band below 500 Hz, there are many peaks having multiple relationships with the frequency at 40.8 Hz in the spectrum of the side hydrophone near REC2 and that of the upper hydrophone near REC4. However, the spectra of the upstream near REC1 and downstream near REC3 hydrophones have many peaks that are multiples of 71.2 Hz. Observing the phenomenon of peak distribution in
Figure 16b,c, with the increase in the distance between hydrophones, the peak distribution of the spectrum becomes more complex. The spectrum of hydrophones at different positions at the same distance has simultaneous multiple peaks of 40.8 and 71.2 Hz. The larger the distance, the more obvious the mix. This is mainly influenced by the hull. When the hydrophone is far away from the origin, the main influence on the sound-pressure is from the propeller to the larger hull. It can be seen from
Figure 16 that the peak values of the multiple of axis frequency and multiple of leaf frequency in the low-frequency band show strong line spectrum characteristics, while the spectrum in the high-frequency band shows obvious broadband spectrum characteristics. Simultaneously, the position of the measuring point also has an impact on the spectrum characteristics. The figure shows that the closer the measuring point to the noise source, the wider the low-frequency band with line spectrum characteristics, and that the line spectrum characteristics in the low-frequency band are more obvious.
Similar to the analysis of
Section 4.1 and according to the formula in
Section 2.3, the one-third-octave band-level spectrum and the total sound pressure of the hydrophone position are calculated, as shown in
Table 10 and
Figure 17.
Figure 17 shows diverse distributions of multiple sound pressures at 1000 Hz at four measuring points. The distributions of sound pressure in the high-frequency band above 1000 Hz are similar. This is similar to the open-water condition. However, unlike the open-water propeller, the peak value of the noise-pressure level is in the high-frequency band, which is not evident. After reaching the peak value, the sound-pressure level at the high-frequency band changes little according to frequency. From
Figure 17, it can be seen that the noise energy is mainly concentrated in the high-frequency band. Under the same distance, the energy distribution of noise signal is similar at different positions.
Moreover, according to total sound-pressure level in
Table 10, those in the upstream are significantly larger, which can be attributed to the influence of the upstream hull.
To investigate the propagation characteristics of the radiated noise when the submarine is sailing, the projection of the central position of the local coordinate system is regarded as the center of the circle, and multiple hydrophones are evenly distributed at different sections so that each section has sixteen hydrophones. After calculating the total sound pressure, the directivity map of sound pressure is drawn, as shown in
Figure 18.
Figure 18 shows the law of noise propagation and attenuation under the self-propulsion condition.
Figure 18a,b shows the directivity curve of the plane parallel to the propeller disc. In these figures, unlike the propeller, the noise pattern of the submarine under self-propulsion is no longer consistent along the circumferential direction, which is more angular than that of the pure propeller. This is mainly influenced by the appendages. The axial attenuation of noise can be seen by comparing the noise of the two images.
Figure 18c,d shows the directivity curve of the plane perpendicular to the propeller disc. Referring to
Figure 18c,d, the sound direction is quite different from that of the pure propeller. The noise level of the hydrophone at the downstream position of the propeller still conforms to the situation for which the thickness noise accounts for the main part when the pure E1619 propeller is used, as in
Section 4.1. However, the noise level at the upstream of the propeller increases significantly, which can be attributed to the submarine hull being directly connected to the upstream propeller. Compared with
Figure 18c,d, even if the hydrophone position is separated from the hull, the radiation noise propagation remains affected by the hull, and the upstream noise is amplified. The radiation noise decays along the propeller radial and axial direction. Furthermore, the upstream noise radial decaying speed is faster.
Figure 19 and
Figure 20 show the sound-pressure distribution at different cross sections. At different frequencies, the overall distribution of sound pressure changes, and the difference between high and low frequencies is obvious. In
Figure 19, the main contribution of low-frequency noise is the monopole, and there is no clear direction for its development. However, it reflects the characteristics of the quadrupole of the four high-pressure areas distributed at the noise source (propeller) area. When the frequency is greater than 500 Hz, the noise contribution of the quadrupole becomes more evident, and the development trend of the sound field becomes that of the quadrupole extending outwards. The quadrupole term gradually becomes the main contribution to total noise.
Figure 20 shows that from the longitudinal section, there are two high-pressure areas near the propeller, and the noise-pressure field develops outwards with these two poles at the center, reflecting dipole characteristics. When the frequency is very high (over 8000 Hz), the development trend of the sound field is also gradually transferred to the quadrupole. Referring to Lighthill [
5] and FW–H final form, the total noise can be divided into expressions of monopole, dipole and quadrupole terms. Regarding the flow on the rotating wall, the speed of rotation is small relative to the speed of sound propagation in water, and the monopole and dipole terms are usually the main contributions to noise. Thus, the influence of quadrupole is usually ignored. However, the two figures show that for cases of high frequency, the quadrupole term in the FW–H equation is no longer negligible.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}