

Autonomous Vehicle-Loading System Simulation and Cost Model Analysis of Roll-On, Roll-Off Port Operations

Abstract
:1. Introduction
2. Literature Review
2.1. Autonomous Vehicles in the Port
2.2. RORO Terminal Automation
2.3. Simulation Approach in RORO Terminals
3. Simulation Model Development
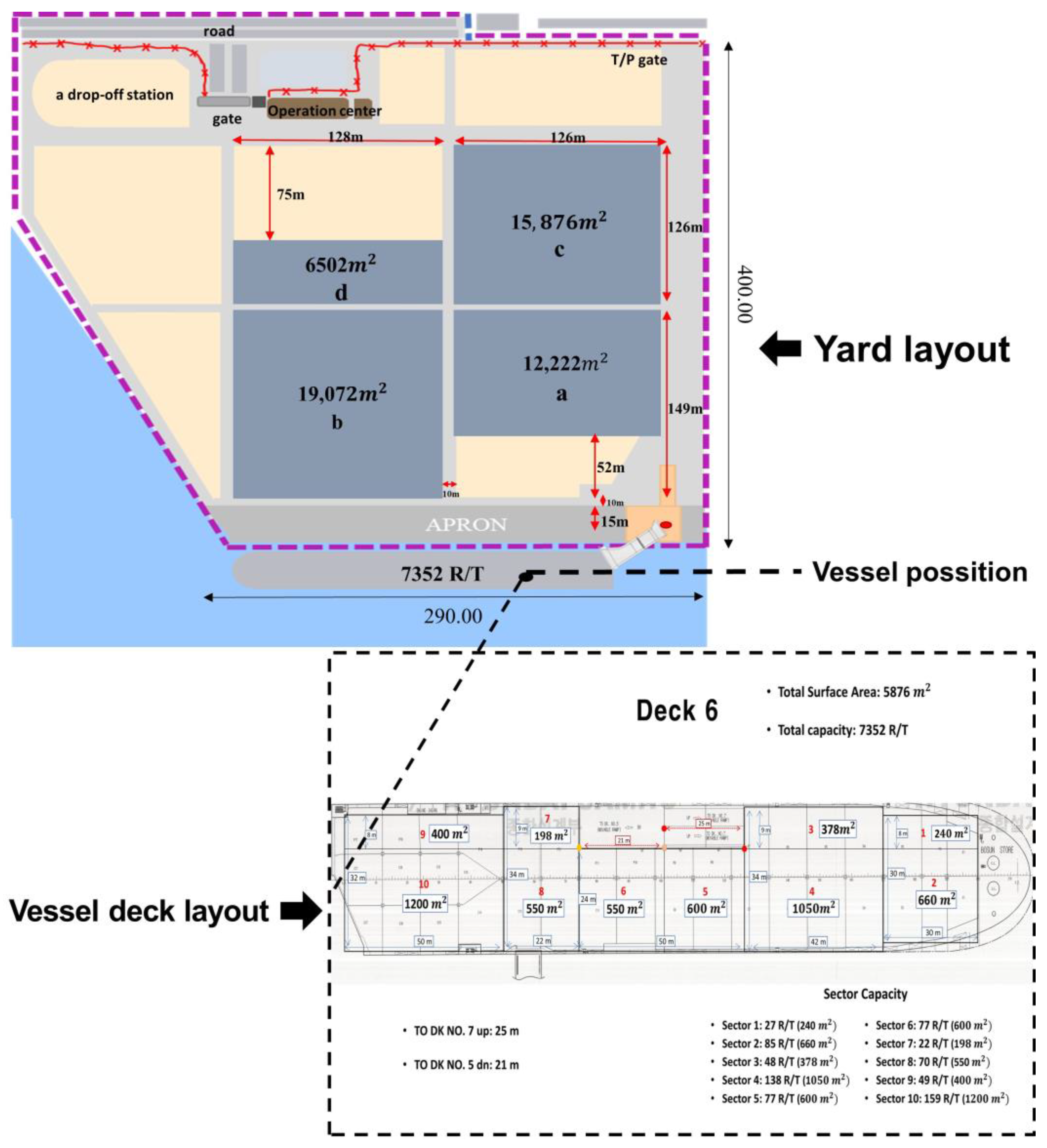
3.1. Case Study
3.2. Arrival Distribution
3.3. Vehicle Speed and Loading Strategy
3.4. Simulation Model
3.4.1. Simulation Assumptions
- Due to the large space between deck pillars and their small surfaces, deck pillar surfaces are not considered.
- Assuming that all 7352 vehicles are loaded, the loading place and loading charges are identical.
- Stowage plans, which consider the balance of the ship, are lacking details.
- Vehicles depart from the yard and board the ship simultaneously.
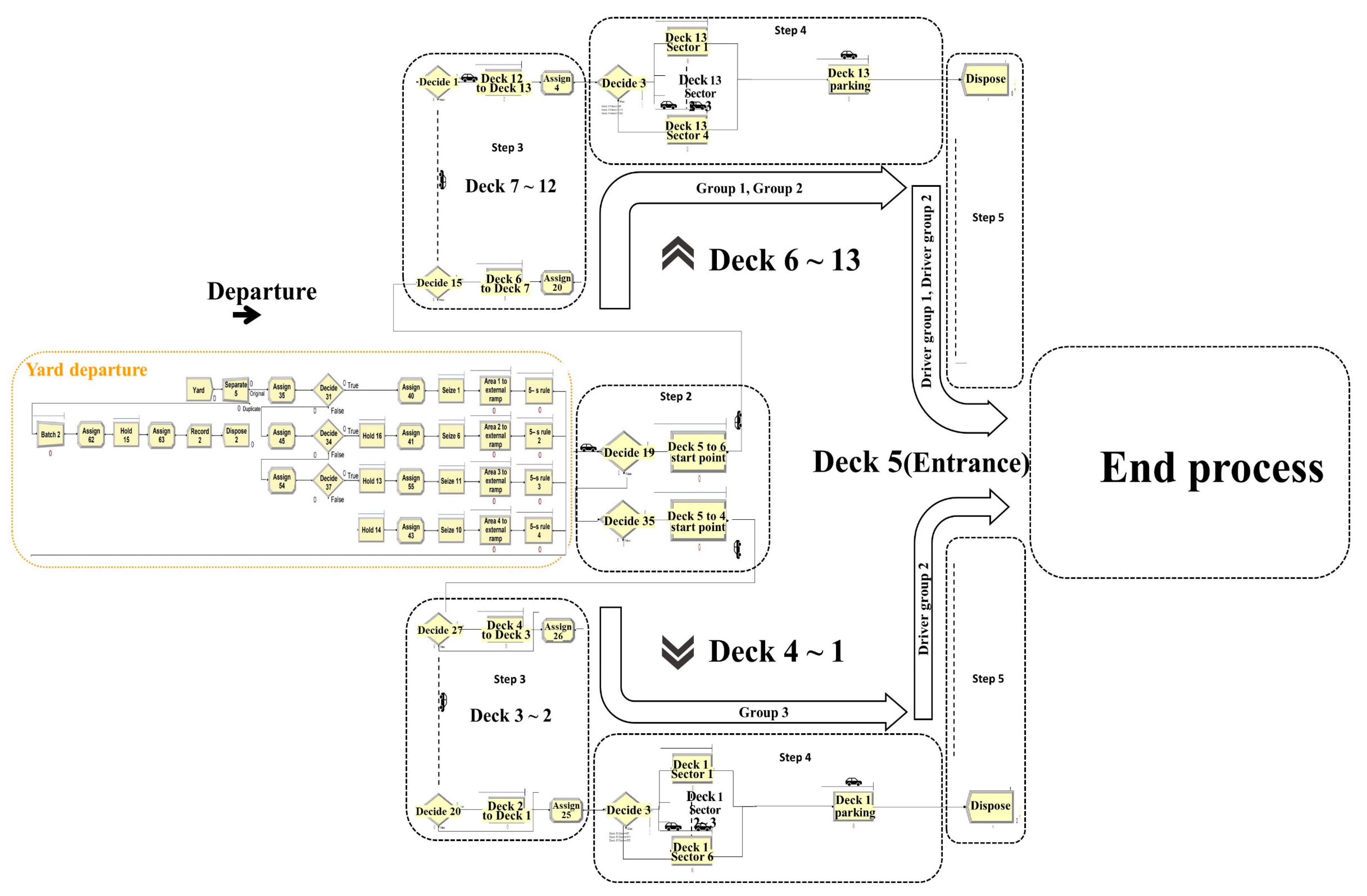
3.4.2. Arena Simulation Models
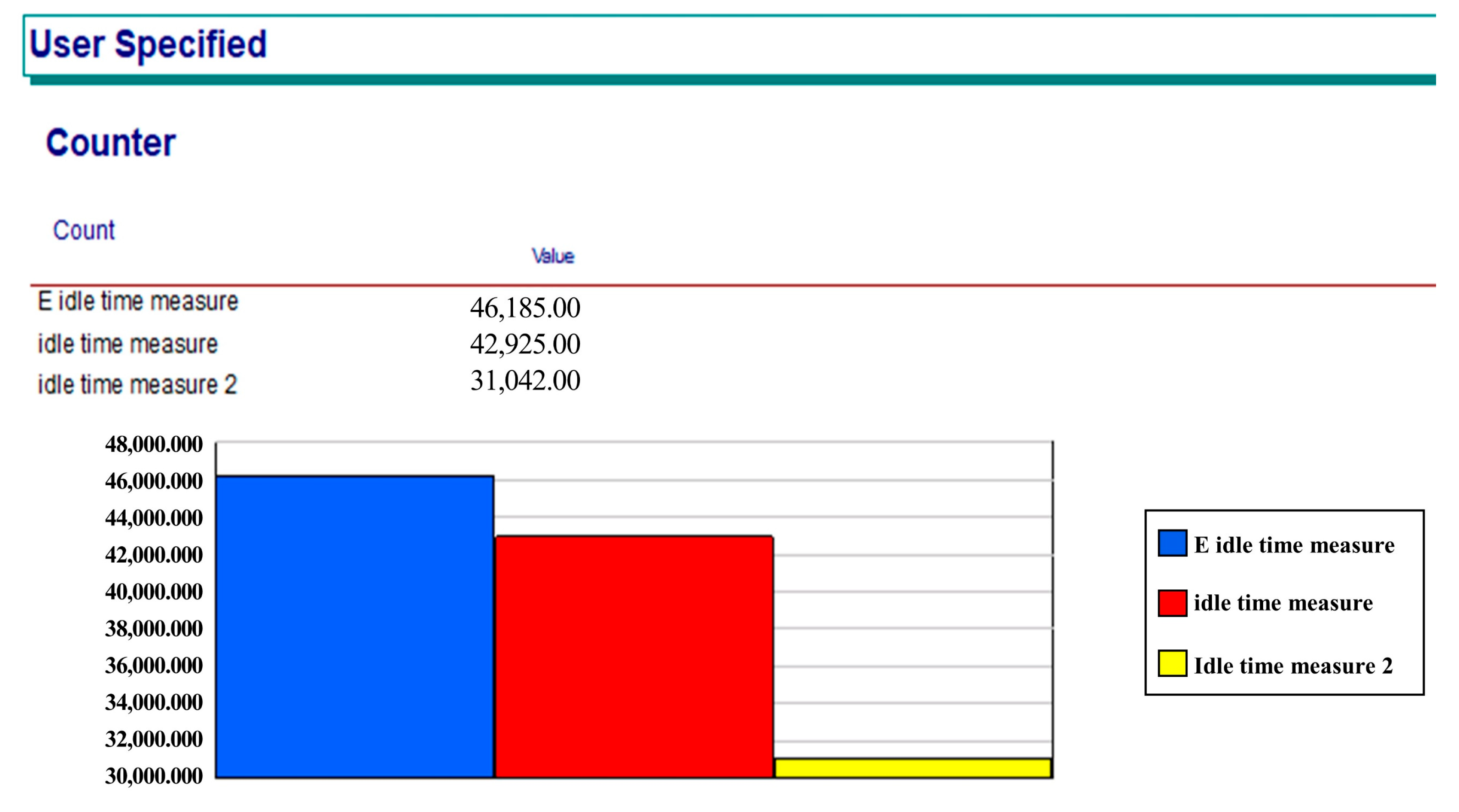
4. Simulation Results and Cost Model Analysis
4.1. Current Loading System
4.2. CAV-Loading System
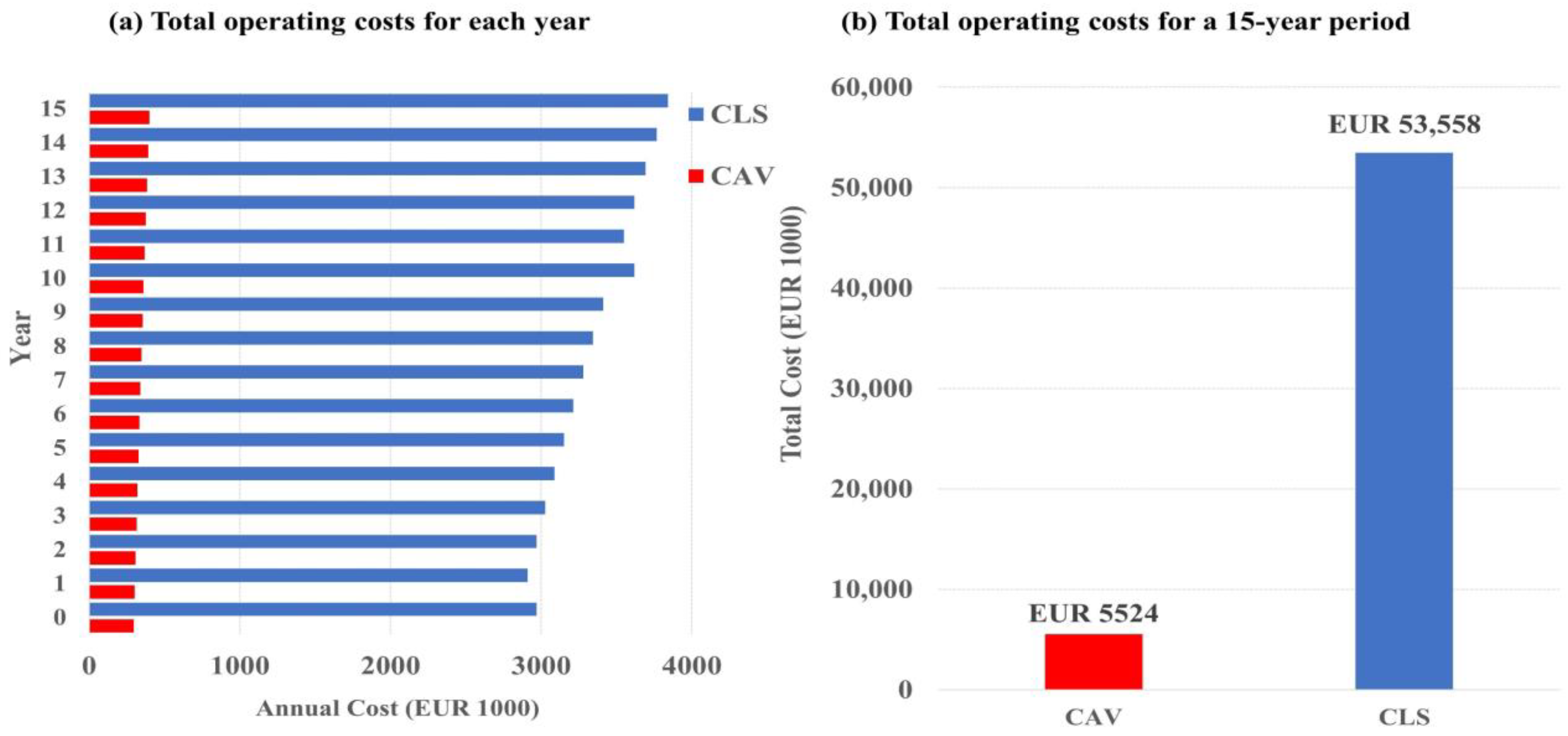
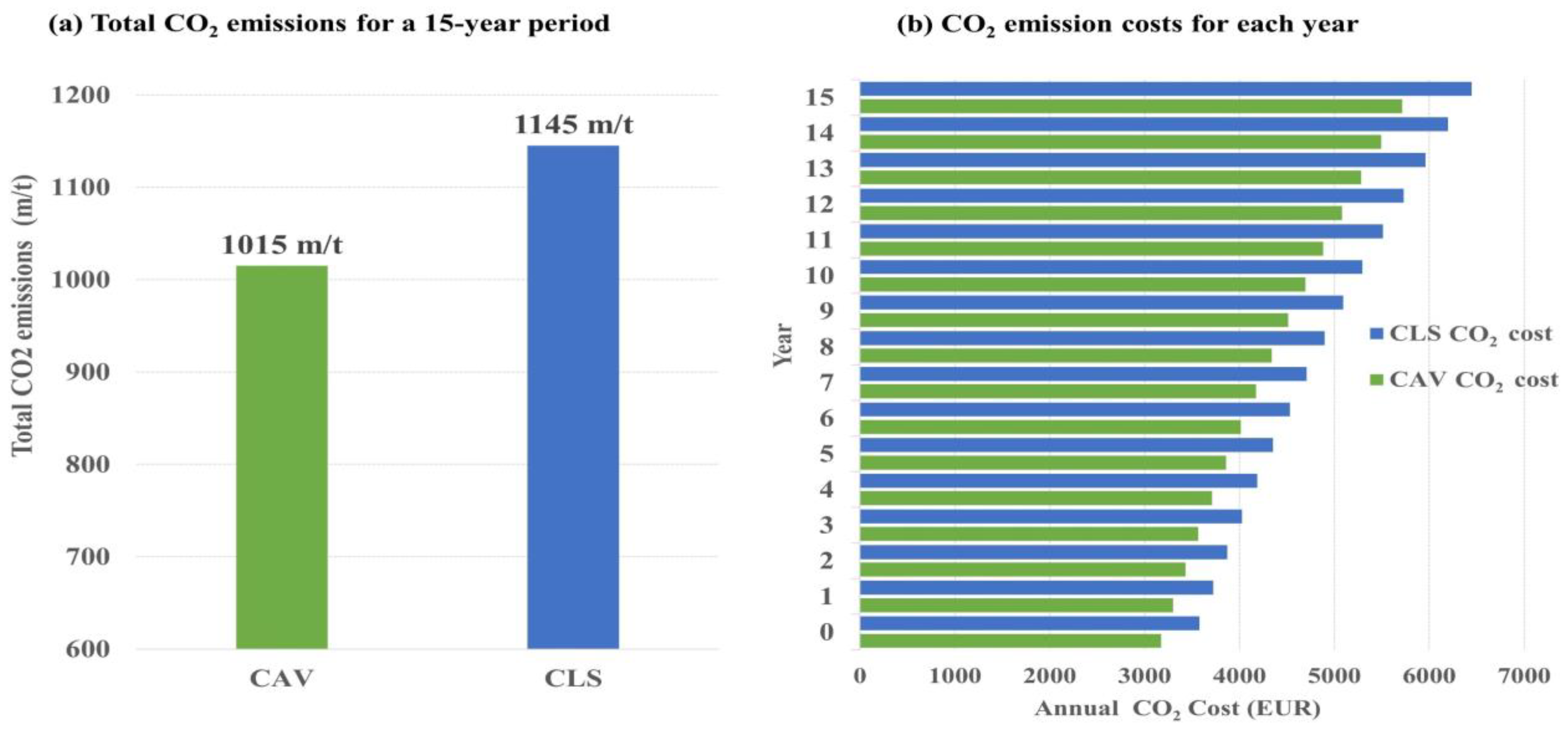
4.3. Cost Model Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Núñez-Merino, M.; Maqueira-Marín, J.M.; Moyano-Fuentes, J.; Castaño-Moraga, C.A. Industry 4.0 and supply chain: A Systematic Science Mapping analysis. Technol. Forecast. Soc. Chang. 2022, 181, 121788. [Google Scholar] [CrossRef]
- Jun, W.K.; An, M.H.; Choi, J.Y. Impact of the connected & autonomous vehicle industry on the Korean national economy using input-output analysis. Technol. Forecast. Soc. Chang. 2022, 178, 121572. [Google Scholar]
- Bansal, P.; Kockelman, K.M. Are we ready to embrace connected and self-driving vehicles? A case study of Texans. Transportation 2018, 45, 641–675. [Google Scholar] [CrossRef]
- Guan, J.; Zhang, S.; D’Ambrosio, L.A.; Zhang, K.; Coughlin, J.F. Potential Impacts of Autonomous Vehicles on Urban Sprawl: A Comparison of Chinese and US Car-Oriented Adults. Sustainability 2021, 13, 7632. [Google Scholar] [CrossRef]
- Marletto, G. Who will drive the transition to self-driving? A socio-technical analysis of the future impact of automated vehicles. Technol. Forecast. Soc. Chang. 2019, 139, 221–234. [Google Scholar] [CrossRef]
- Çetin Er, C.; Ozcan, O. Urban and architectural spatial changes based on technology-adapted users: A literature review. Technol. Forecast. Soc. Chang. 2022, 182, 121783. [Google Scholar] [CrossRef]
- Kim, Y.S.; Woo, S.H.; Yoo, S.Y. Re-engineering for Export Logistics System of Autonomous Vehicle Distribution. J. Shipp. Logist. 2021, 37, 869–884. [Google Scholar]
- Pérez, J.E.; Romero, J.E.G.; Ramírez, C.M. Performance of the Car Carrier Shipping Sector in the Iberian Peninsula under the COVID-19 Scenario. J. Mar. Sci. Eng. 2021, 9, 1295. [Google Scholar] [CrossRef]
- Seo, J.H.; Gong, J.M.; Nam, T.H.; Yeo, G.T. Analyzing Efficiency of Korean Automobile Ports. J. Navig. Port. Res. 2017, 41, 127–136. [Google Scholar]
- Chen, X.; Li, F.; Jia, B.; Wu, J.; Gao, Z.; Liu, R. Optimizing storage location assignment in an automotive Ro-Ro terminal. Transp. Res. B Methodol. 2021, 143, 249–281. [Google Scholar] [CrossRef]
- Sun, X.; Wang, S.; Wang, Z.; Liu, C.; Yin, Y. A semi-automated approach to stowage planning for Ro-Ro ships. Ocean. Eng. 2022, 247, 110648. [Google Scholar] [CrossRef]
- Zhao, J.; Liang, B.; Chen, Q. The key technology toward the self-driving car. Int. J. Intell. Unmanned Syst. 2018, 6, 2–20. [Google Scholar] [CrossRef]
- Park, S.H.; Hwang, J.H.; Yang, H.J.; Kim, S.H. Simulation Modelling for Automated Guided Vehicle Introduction to the Loading Process of Ro-Ro Ships. J. Mar. Sci. Eng. 2021, 9, 441. [Google Scholar] [CrossRef]
- Park, S.H.; Hwang, J.H.; Yoon, S.H.; Kim, S.H. Automatic Guided Vehicles Introduction Impacts to Roll-On/Roll-Off Terminals: Simulation and Cost Model Analysis. J. Adv. Transp. 2022, 2022, 6062840. [Google Scholar] [CrossRef]
- Moon, D.S.H.; Woo, J.K. The impact of port operations on efficient ship operation from both economic and environmental perspectives. Marit. Policy Manag. 2014, 41, 444–461. [Google Scholar] [CrossRef]
- Min, H. Developing a smart port architecture and essential elements in the era of Industry 4.0. Marit. Econ. Logist. 2022, 24, 189–207. [Google Scholar] [CrossRef]
- Malmborg, C.J. Conceptualizing tools for autonomous vehicle storage and retrieval systems. Int. J. Prod. Res. 2002, 40, 1807–1822. [Google Scholar] [CrossRef]
- Gharehgozli, A.; Zaerpour, N.; Koster, R.D. Container terminal layout design: Transition and future. Marit. Econ. Logist. 2019, 22, 610–639. [Google Scholar] [CrossRef]
- Wang, P.; Mileski, J.P.; Zeng, Q. Alignments between strategic content and process structure: The case of container terminal service process automation. Marit. Econ. Logist. 2019, 21, 543–558. [Google Scholar] [CrossRef]
- Zhu, Y.; Geng, Y.; Huang, R.; Zhang, X.; Wang, L.; Liu, W. Driving Towards the Future: Exploring Human-Centered Design and Experiment of Glazing Projection Display Systems for Autonomous Vehicles. Int. J. Hum. Comput. 2023, 1–16. [Google Scholar] [CrossRef]
- Kavakeb, S.; Nguyen, T.T.; McGinley, K.; Yang, Z.; Jenkinson, L.; Murray, R. Green vehicle technology to enhance the performance of a European port: A simulation model with a cost-benefit approach. Transp. Res. Part. C Emerg. Technol. 2015, 60, 169–188. [Google Scholar] [CrossRef] [Green Version]
- Bahnes, N.; Relvas, S.; Haffaf, H. Cooperation between Intelligent Autonomous Vehicles to enhance container terminal operations. J. Innov. Digit. Ecosys 2016, 3, 22–29. [Google Scholar] [CrossRef] [Green Version]
- Bae, H.Y.; Choe, R.; Park, T.; Ryu, K.R. Comparison of operations of AGVs and ALVs in an automated container terminal. J. Intell. Manuf. 2011, 22, 413–426. [Google Scholar] [CrossRef]
- Kim, H.S.; Sun, I.S.; Anh, S.B. The Study on problems and solution of Automobile Loading and Unloading Process in Pyeongtaek Port. Asian J. Shipp. Logist. 2014, 30, 321–347. [Google Scholar]
- Kim, H.Y. A Comparative Analysis of the Efficiency of Automobile Export Ports in Korea and Japan. J. Korea Port. Econ. Assoc. 2017, 33, 73–82. [Google Scholar] [CrossRef]
- Choi, K.Y. A Research on the Factors for Selecting Pyeongtaek Port for Importation of Cars. J. Korea Port. Econ. Assoc. 2011, 27, 231–245. [Google Scholar]
- Ahn, S.S.; Lee, J.B.; Kim, J.J.; Sohn, Y.H.; Koo, H.M. A Study on the Design of the Import/Export Ports Cyber-Physical System for Intelligent Vehicle. J. Korea Acad. Ind. Coop. Soc. 2021, 22, 25–35. [Google Scholar]
- Keceli, Y.; Aksoy, S.; Aydogdu, V. A simulation model for decision support in Ro-Ro terminal operations. Int. J. Logist. Syst. Manag. 2013, 15, 338–358. [Google Scholar] [CrossRef]
- Iannone, R.; Miranda, S.; Prisco, L.; Riemma, S.; Sarno, D. Proposal for a flexible discrete event simulation model for assessing the daily operation decisions in a Ro–Ro terminal. Simul. Model. Pract. Theory 2016, 61, 28–46. [Google Scholar] [CrossRef]
- Özkan, E.D.; Nas, S.; Güler, N. Capacity Analysis of Ro-Ro Terminals by Using Simulation Modeling Method. Asian J. Shipp. Logist. 2016, 32, 139–147. [Google Scholar] [CrossRef] [Green Version]
- Muravev, D.; Aksoy, S.; Rakhmangulov, A.; Aydogdu, Y.V. Comparing model development in discrete event simulation on Ro-Ro terminal example. Int. J. Logist. Syst. Manag. 2016, 24, 283–297. [Google Scholar]
- Preston, G.C.; Horne, P.; Scaparra, M.P.; O’Hanley, J.R. Masterplanning at the Port of Dover: The Use of Discrete-Event Simulation in Managing Road Traffic. Sustainability 2020, 12, 1067. [Google Scholar] [CrossRef] [Green Version]
- Abourraja, M.N.; Kringos, N.; Meijer, S. Exploiting simulation model potential in investigating handling capacity of Ro-Ro terminals: The case study of Norvik seaport. Simul. Model. Pract. Theory 2022, 117, 102513. [Google Scholar] [CrossRef]
- Abourraja, M.N.; Rouky, N.; Kornevs, M.; Meijer, S.; Kringos, N. A simulation-based decision support framework devoted to Ro–Ro terminals: Design, implementation and evaluation. Comput. Ind. Eng. 2023, 180, 109248. [Google Scholar] [CrossRef]
- Belcore, O.M.; Di Gangi, M.; Polimeni, A. Connected Vehicles and Digital Infrastructures: A Framework for Assessing the Port Efficiency. Sustainability 2023, 15, 8168. [Google Scholar] [CrossRef]
- Todorrov, D.M. Ro-Ro Handbook: A Practical Guide to Roll-On Roll-Off Cargo Ships, 1st ed.; Cornell Maritime Press: Fort Lauderdale, FL, USA, 2016; pp. 1–240. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Simulation Feature | Terminal | Software | Model Scope |
|---|---|---|---|---|
| Keceli et al. [28] | DES | RORO | ARENA | RORO terminal decision support system |
| Iannone et al. [29] | DES | RORO | ARENA | RORO terminal performance evaluation: loading and storage under different operational alternatives |
| Ozkan et al. [30] | DES | RORO | Not stated | RORO terminal capacity analysis: A simulation model for terminal operators and port planners |
| Muravev [31] | DES | RORO | ARENA, AnyLogic | RORO terminal simulation models: scalability, flexibility, and result accuracy comparison |
| Preston et al. [32] | DES | RORO | Vissim | Minimizing local impact and environment |
| Park et al. [13,14] | DES | RORO | ARENA | Impact evaluation of AGVs on RORO terminal operations |
| Abourraja et al. [33,34] | DES | RORO | Not stated | RORO terminal performance analysis: resource allocation and layout planning emphasis |
| Belcore et al. [35] | DES | RORO | Not stated | Landside operations efficiency under traffic variability |
| Yard (km/h) | External Ramp (km/h) | Safe Distance (m) |
|---|---|---|
| Drivers | 21.25–25.0 | 10–15 |
| CAVs | 25 | 15 |
| Average (s) | Minimum Average (s) | Maximum Average (s) | Minimum Value (s) | Maximum Value (s) | |
|---|---|---|---|---|---|
| 5 s rule in area 1. Queue | 11.4681 | 11.1811 | 11.6046 | 0.00 | 60.5316 |
| 5 s rule in area 2. Queue | 10.1338 | 9.9014 | 10.3986 | 0.00 | 59.7461 |
| 5 s rule in area 3. Queue | 10.9383 | 10.7028 | 11.2157 | 0.00 | 46.0921 |
| 5 s rule in area 4. Queue | 16.0545 | 15.1694 | 18.2607 | 0.00 | 100.12 |
| Drivers batching to shuttle van. Queue | 35.1584 | 34.4728 | 35.7574 | 0.00 | 115.48 |
| External ramp to Deck 5. Queue | 16.0989 | 15.4302 | 16.5355 | 0.00 | 95.6040 |
| Deck 5 to External ramp. Queue | 9.8135 | 8.9109 | 10.4750 | 0.00 | 79.9543 |
| Total loading time | 83,515.60 | 83,094.00 | 83,936.00 |
| Parameter Description | Symbol | Unit | Value |
|---|---|---|---|
| Liters of diesel consumed per 100 km by the van | 1 L/100 km | 12 | |
| Price per liter of diesel | EUR/L | 1.24 | |
| Travel distance for a van per loading process | km | 590 | |
| Total working hours per loading process | h | 26 | |
| Hourly pay for a stevedore | EUR/h | 19 | |
| Hourly pay for a CAV operator | EUR/h | 19 | |
| Number of loading processes per year | - | 120 | |
| Number of stevedores | Person | 16 | |
| Number of gangs | Group | 3 | |
| Number of CAV operators | Person | 6 | |
| Total service cost per van for a year | EUR/year | 1000 | |
| Price per shuttle van | EUR/vehicle | 150,000 |
| Parameter Description | Symbol | Unit | Value |
|---|---|---|---|
| Total energy cost of a van per loading process | EUR | 95 | |
| Total wages for stevedores per loading process | EUR | 494 | |
| Total wages for CAV operators per loading process | EUR | 494 | |
| Total CO2 emissions produced from the current loading system per loading process | g | 596,490 | |
| Total CO2 emissions from the CAV-loading system per loading process | g | 528,640 |
| T | Current Loading System | CAV-Loading System | ||||
|---|---|---|---|---|---|---|
| 0 | 2,859,840 | 114,000 | 2,973,840 | 296,400 | 0 | 296,400 |
| 1 | 2,917,037 | 0 | 2,917,037 | 302,328 | 0 | 302,328 |
| 2 | 2,975,378 | 0 | 2,975,378 | 308,375 | 0 | 308,375 |
| 3 | 3,034,885 | 0 | 3,034,885 | 314,542 | 0 | 314,542 |
| 4 | 3,095,583 | 0 | 3,095,583 | 320,833 | 0 | 320,833 |
| 5 | 3,157,494 | 0 | 3,157,494 | 327,250 | 0 | 327,250 |
| 6 | 3,220,644 | 0 | 3,220,644 | 333,795 | 0 | 333,795 |
| 7 | 3,285,057 | 0 | 3,285,057 | 340,470 | 0 | 340,470 |
| 8 | 3,350,758 | 0 | 3,350,758 | 347,280 | 0 | 347,280 |
| 9 | 3,417,774 | 0 | 3,417,774 | 354,225 | 0 | 354,225 |
| 10 | 3,486,129 | 138,965 | 3,625,094 | 361,310 | 0 | 361,310 |
| 11 | 3,555,852 | 0 | 3,555,852 | 368,536 | 0 | 368,536 |
| 12 | 3,626,969 | 0 | 3,626,969 | 375,907 | 0 | 375,907 |
| 13 | 3,699,508 | 0 | 3,699,508 | 383,425 | 0 | 383,425 |
| 14 | 3,773,498 | 0 | 3,773,498 | 391,094 | 0 | 391,094 |
| 15 | 3,848,968 | 0 | 3,848,968 | 398,915 | 0 | 398,915 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Yun, S.; Kim, S. Autonomous Vehicle-Loading System Simulation and Cost Model Analysis of Roll-On, Roll-Off Port Operations. J. Mar. Sci. Eng. 2023, 11, 1507. https://doi.org/10.3390/jmse11081507
Park S, Yun S, Kim S. Autonomous Vehicle-Loading System Simulation and Cost Model Analysis of Roll-On, Roll-Off Port Operations. Journal of Marine Science and Engineering. 2023; 11(8):1507. https://doi.org/10.3390/jmse11081507
Chicago/Turabian StylePark, Sanghyung, Sohyun Yun, and Sihyun Kim. 2023. "Autonomous Vehicle-Loading System Simulation and Cost Model Analysis of Roll-On, Roll-Off Port Operations" Journal of Marine Science and Engineering 11, no. 8: 1507. https://doi.org/10.3390/jmse11081507
APA StylePark, S., Yun, S., & Kim, S. (2023). Autonomous Vehicle-Loading System Simulation and Cost Model Analysis of Roll-On, Roll-Off Port Operations. Journal of Marine Science and Engineering, 11(8), 1507. https://doi.org/10.3390/jmse11081507