
Model Experimental Study on a T-Foil Control Method with Anti-Vertical Motion Optimization of the Mono Hull


Abstract
:1. Introduction
2. Control Method
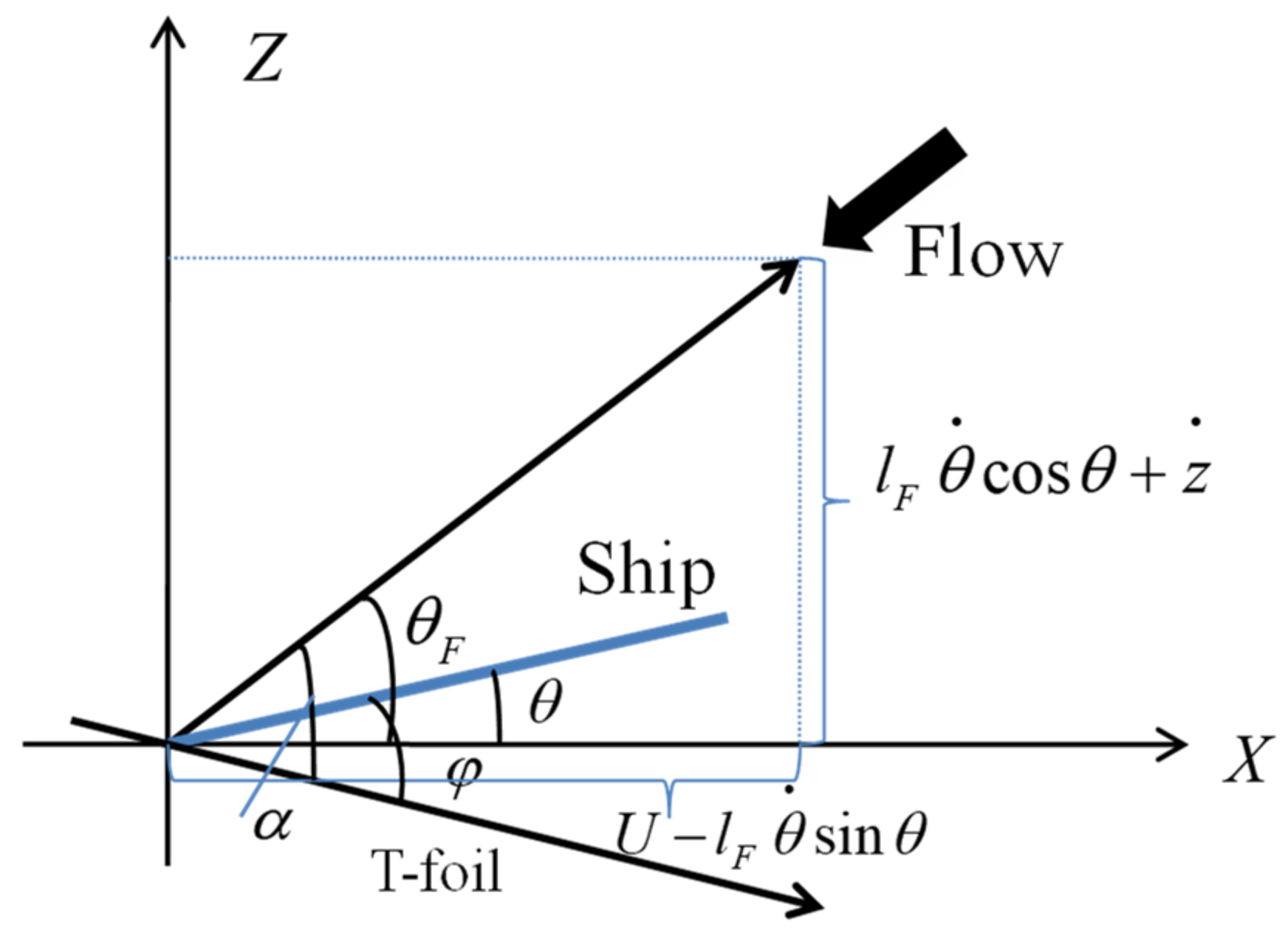
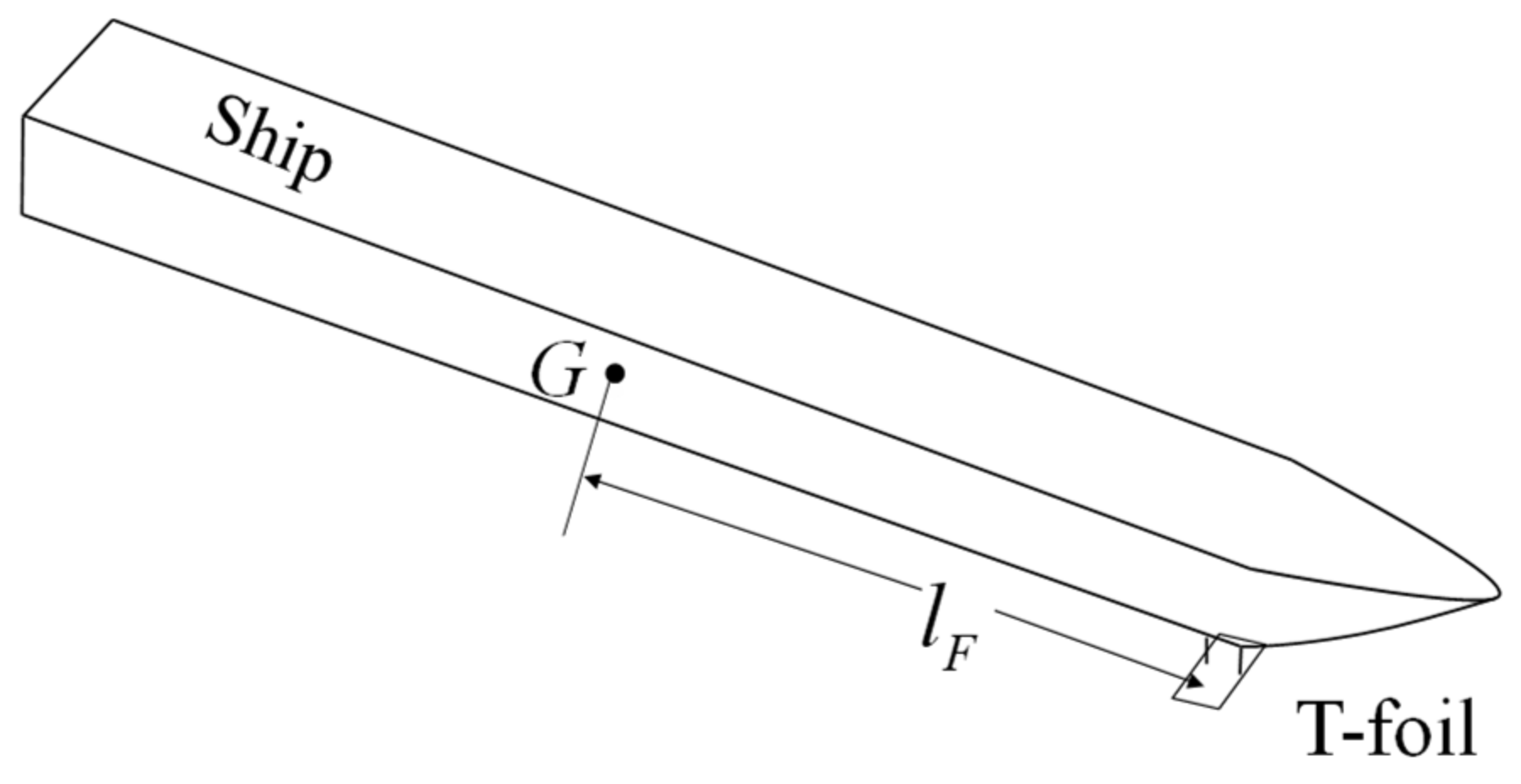
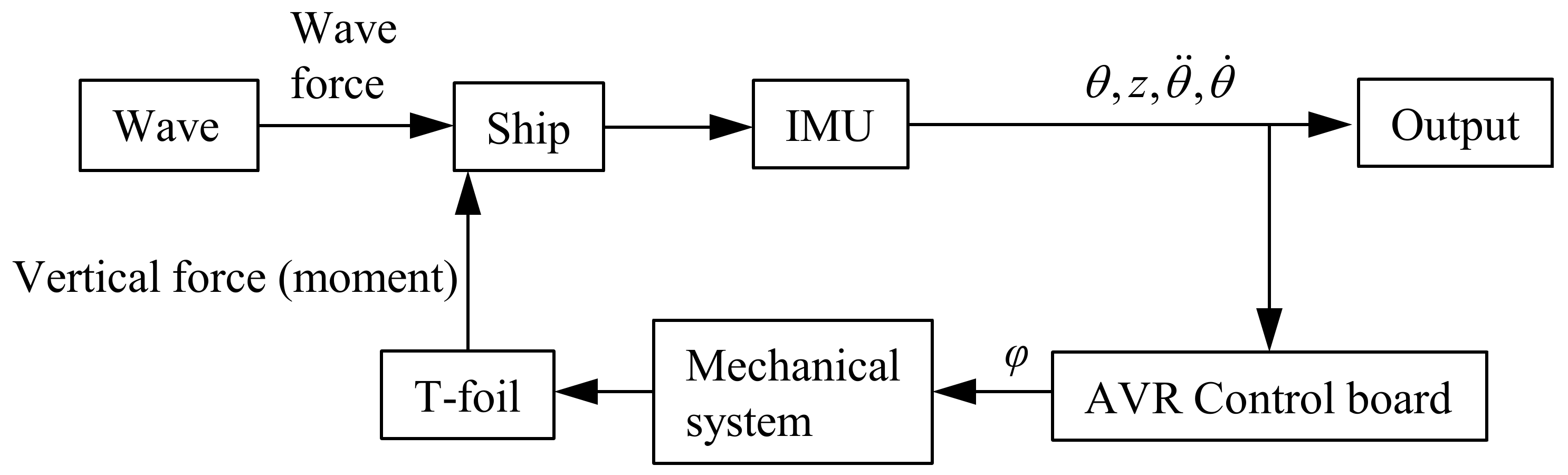
2.1. Mathematical Model of Active Control of T-Foil
2.2. Lifting Moment Control Equation
2.3. Control Equation Simplification
3. Test Design
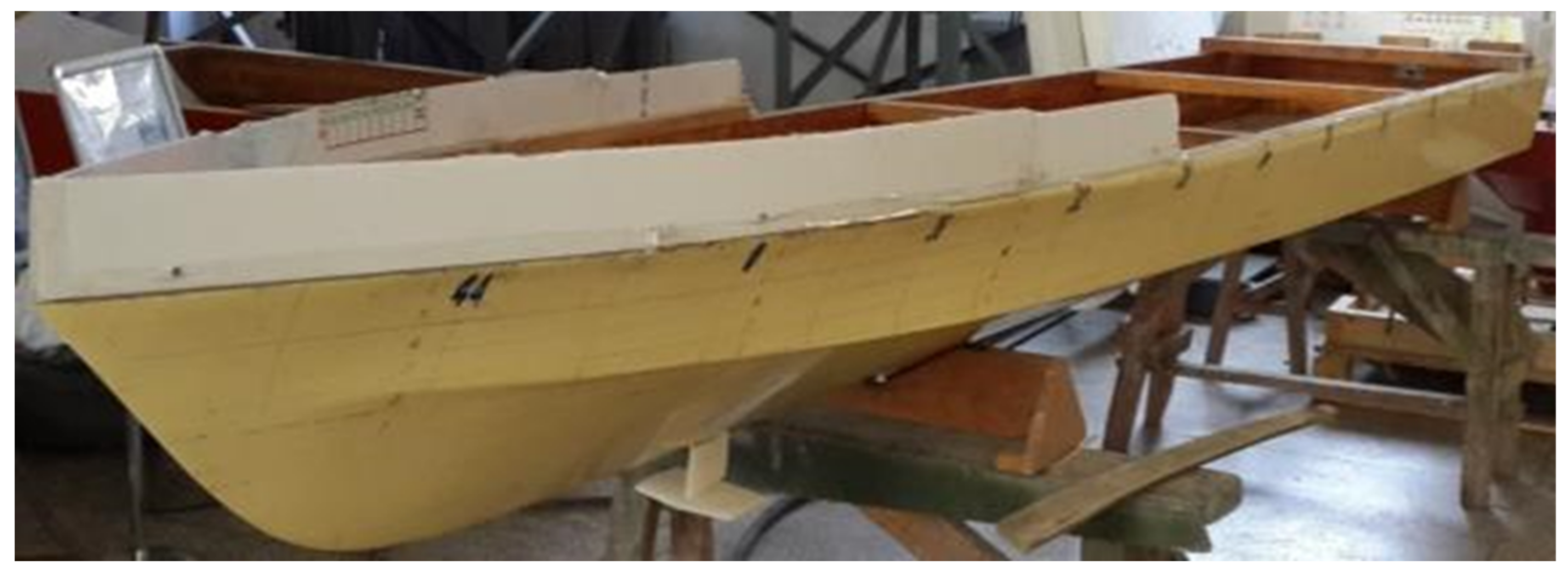
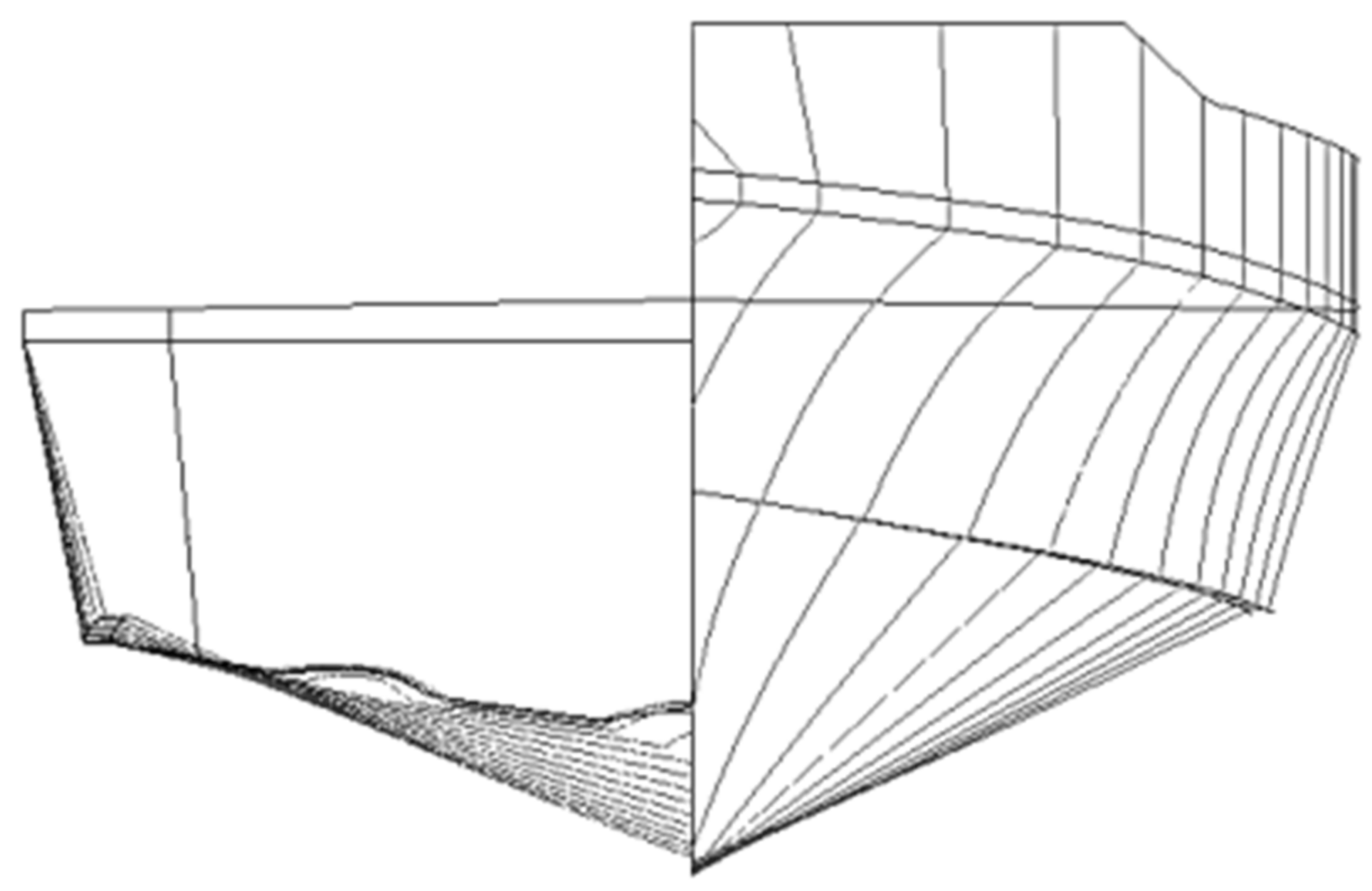
3.1. Experimental Model
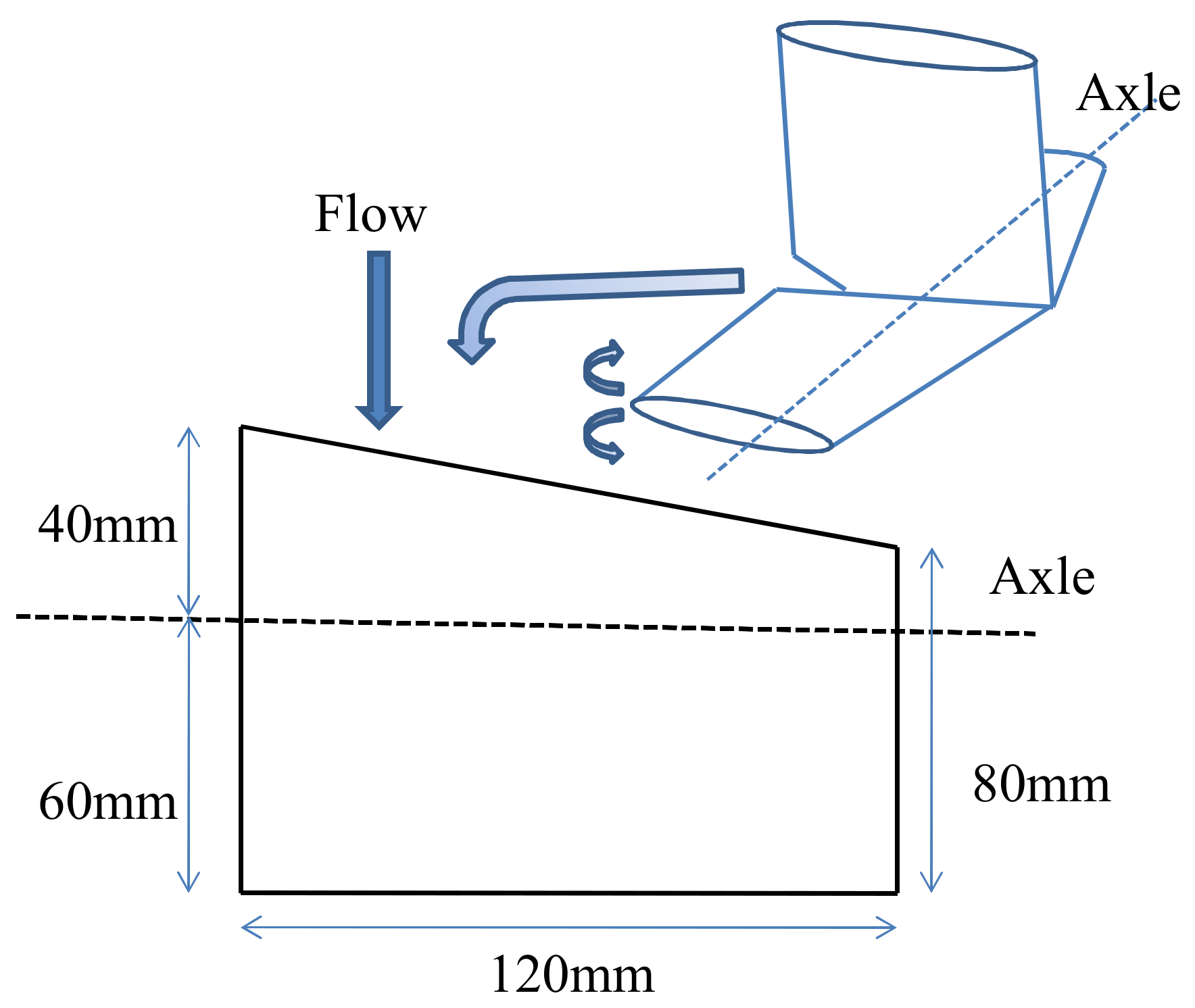
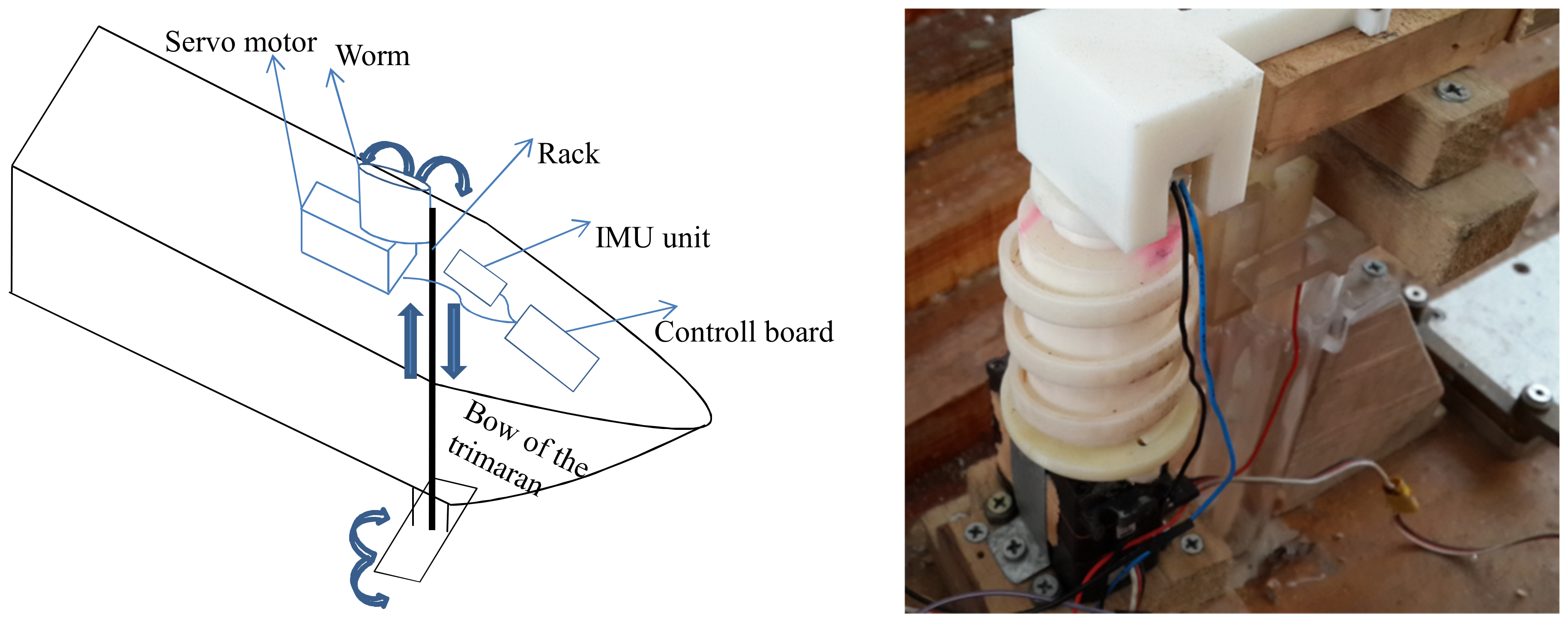
3.2. T-Foil Control System
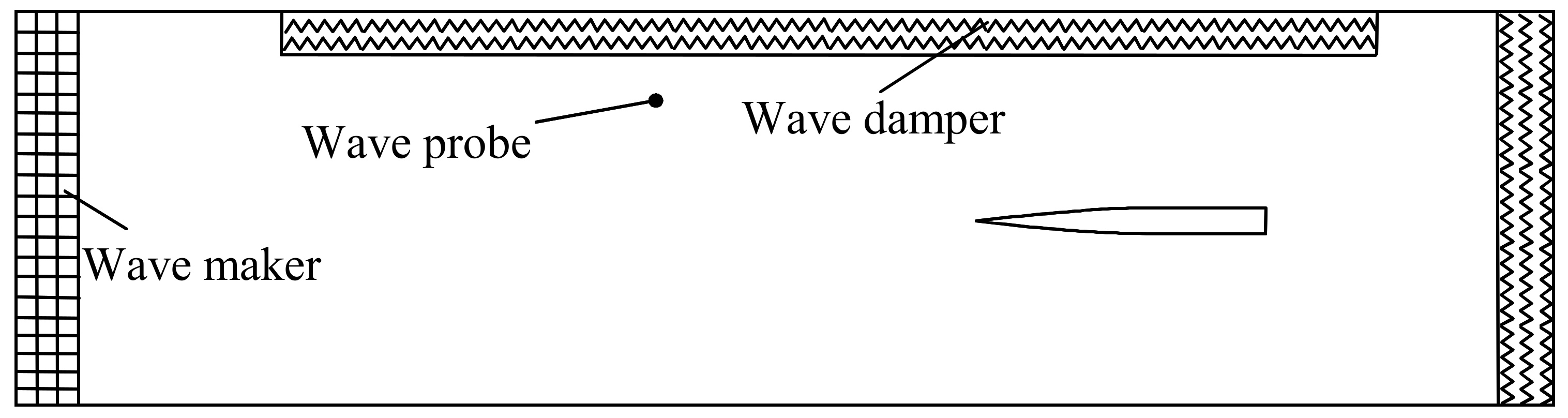
3.3. Test Equipment
3.4. Model Experimental Design
- (1)
- The response to heave, pitch, and bow accelerations was measured when the ship model sailed under regular waves with different wavelengths.
- (2)
- The motion responses of the ship model with a passive T-foil were measured under the same speed and wave conditions to calculate the value of the control parameter, C, according to the measured time-record curve.
4. Analysis of Experiment Results and Discussion
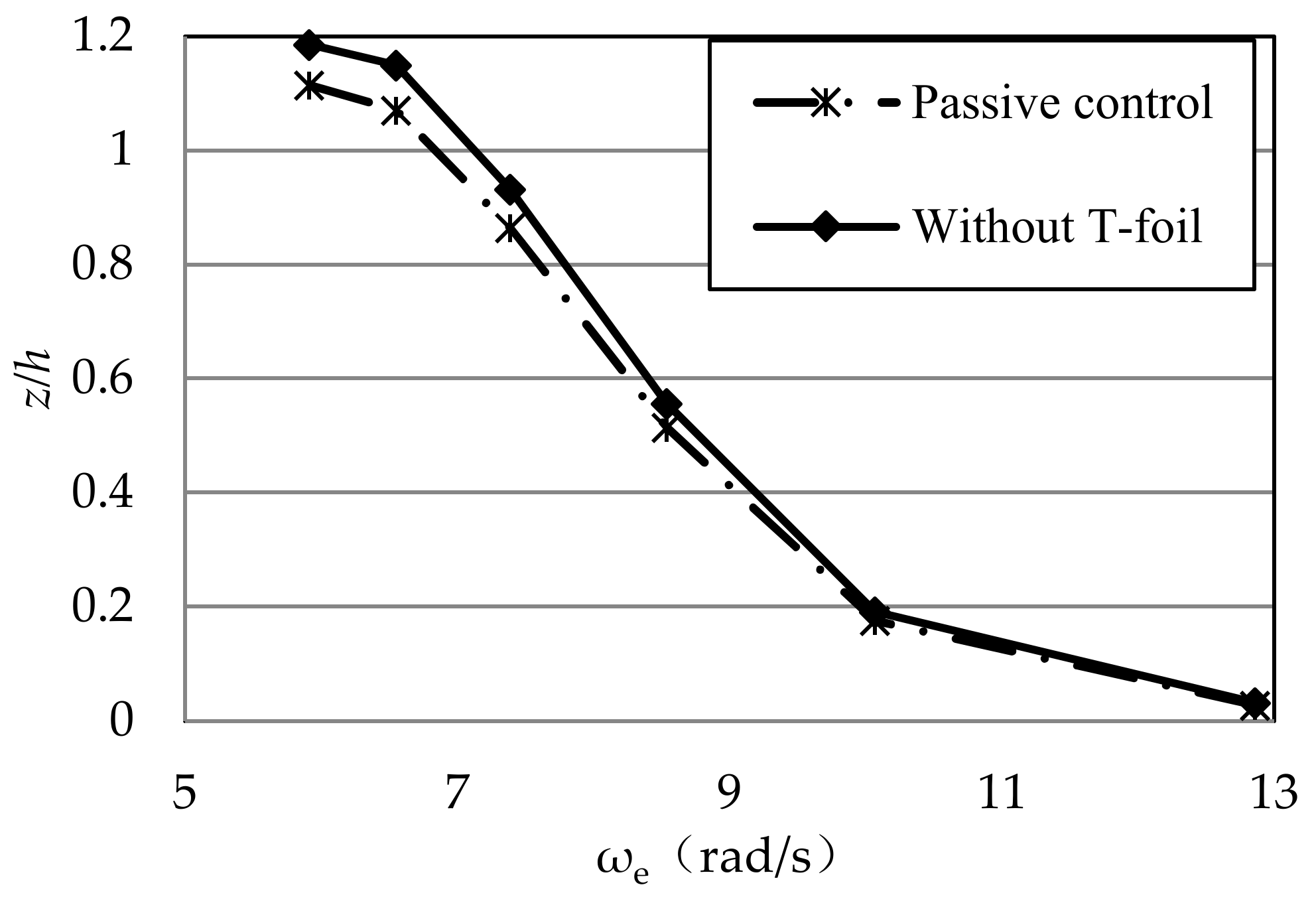
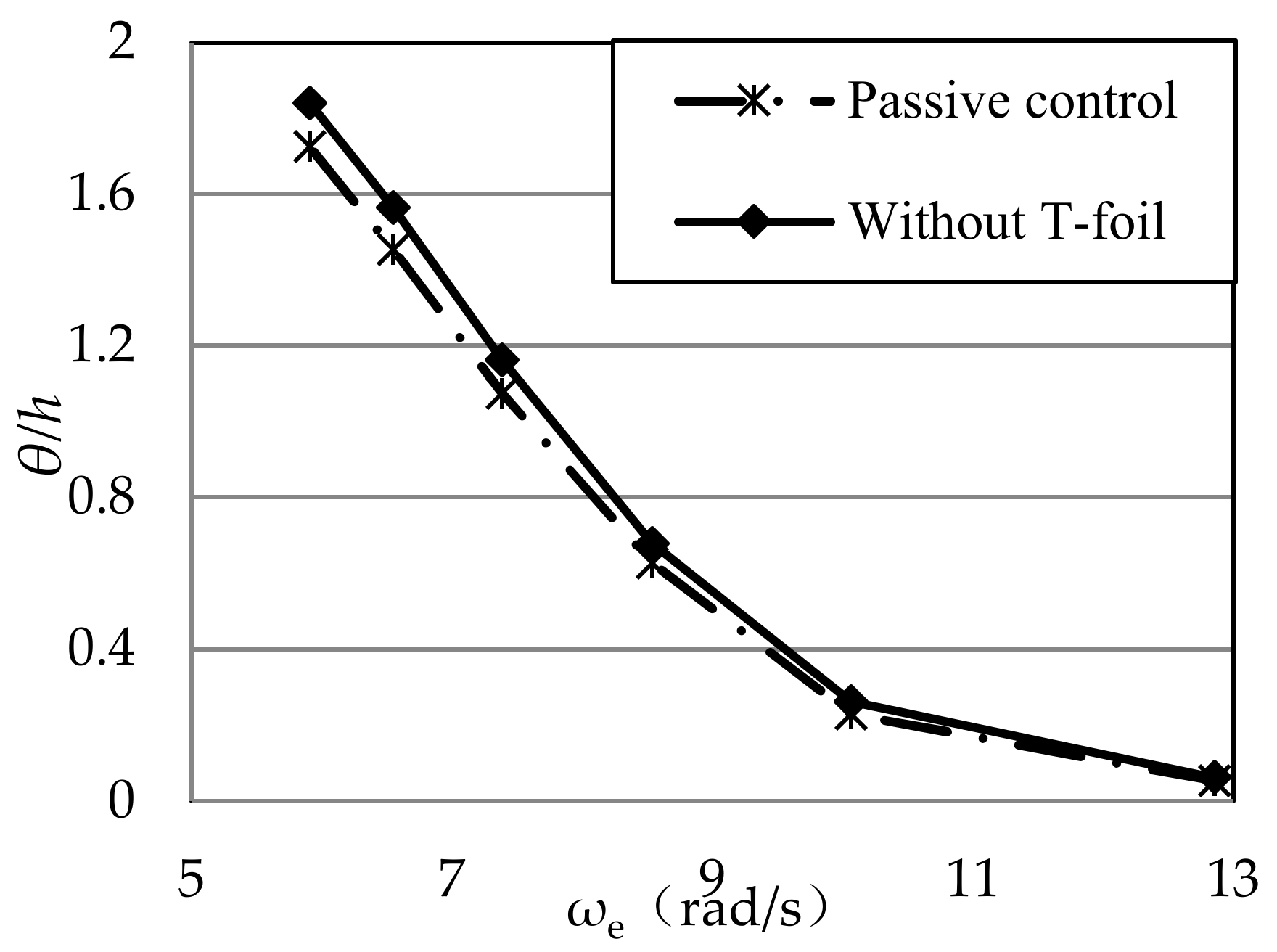
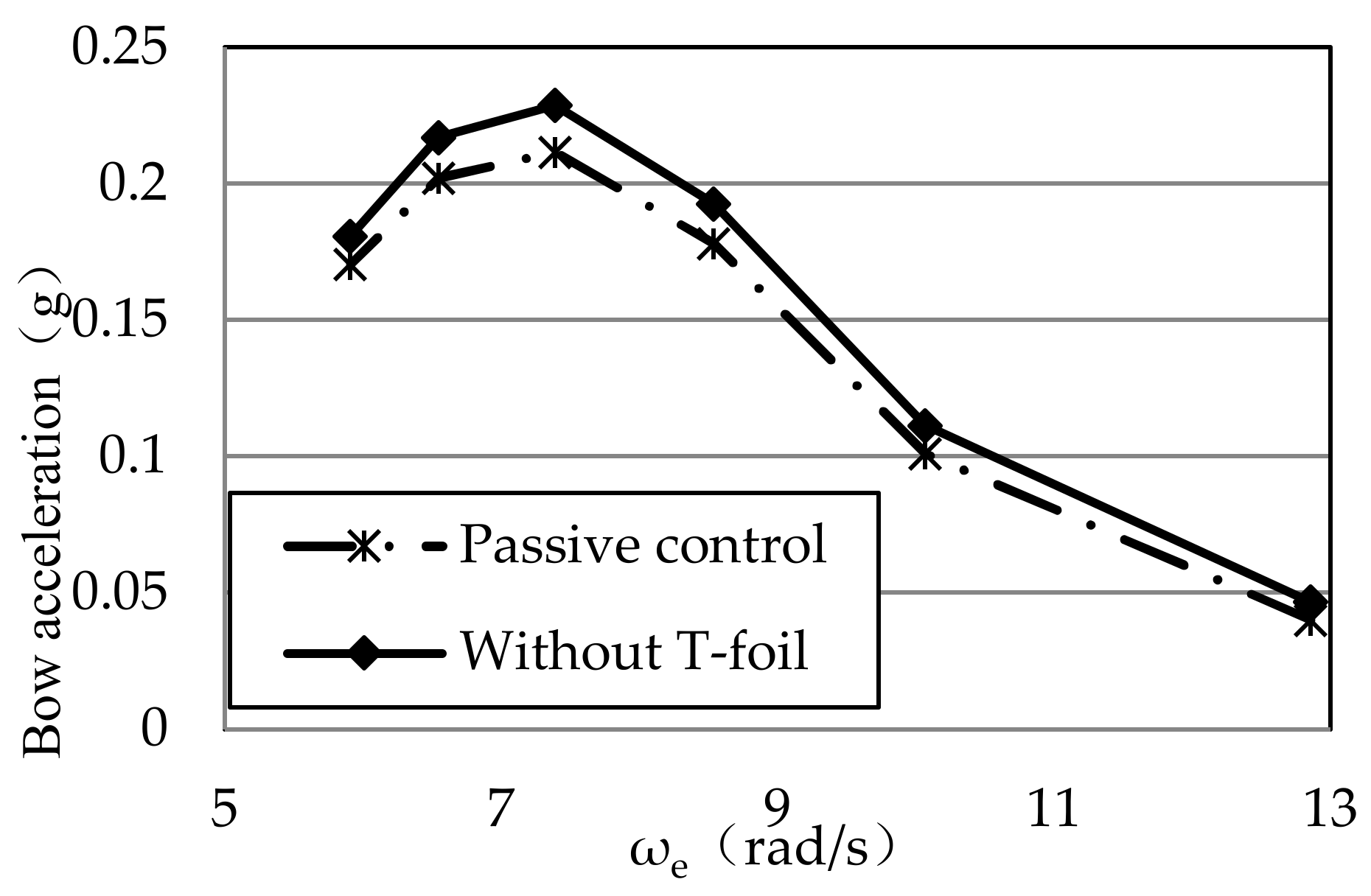
4.1. The Effect of Passive T-Foil
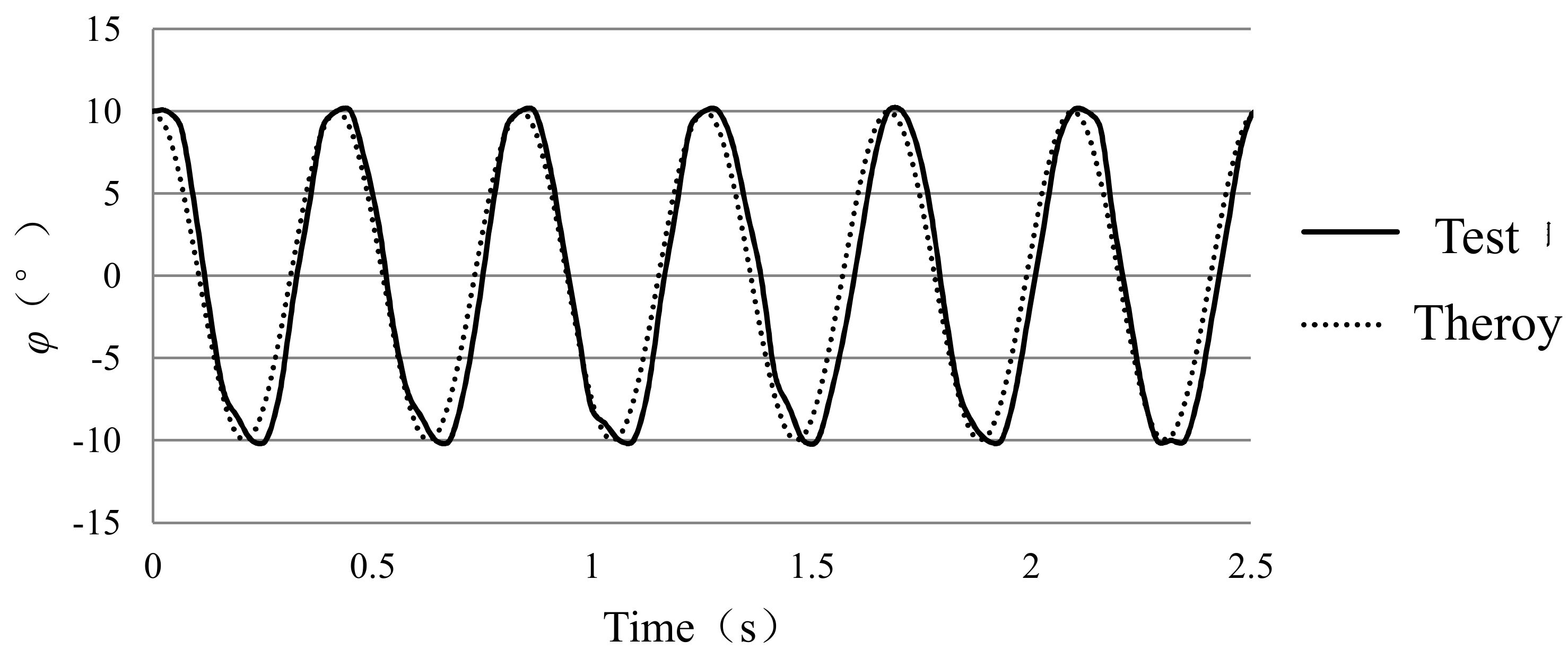
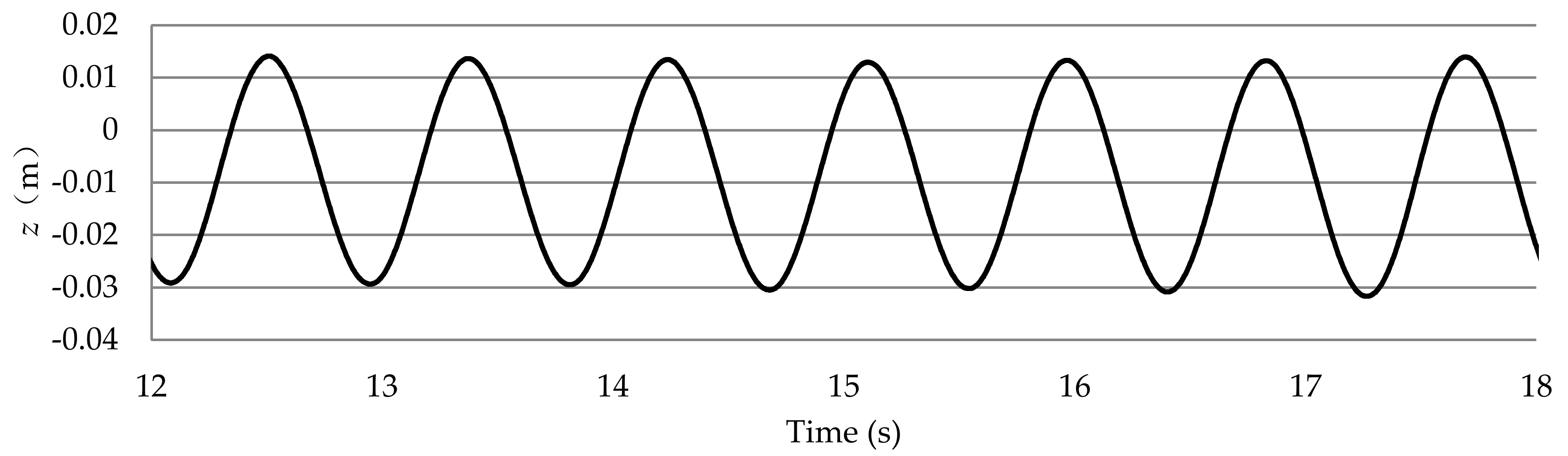
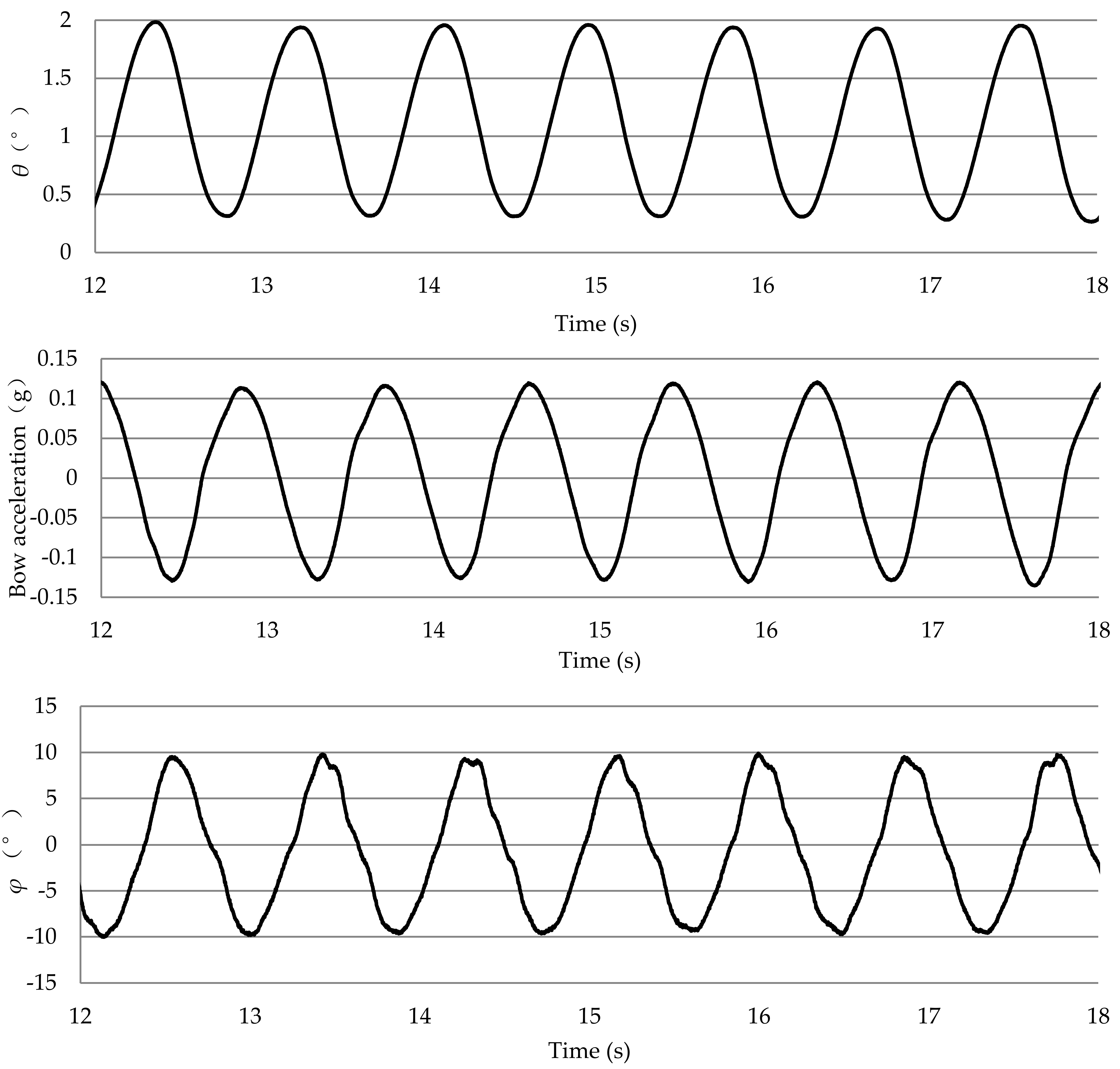
4.2. Comparison of Motion Signals
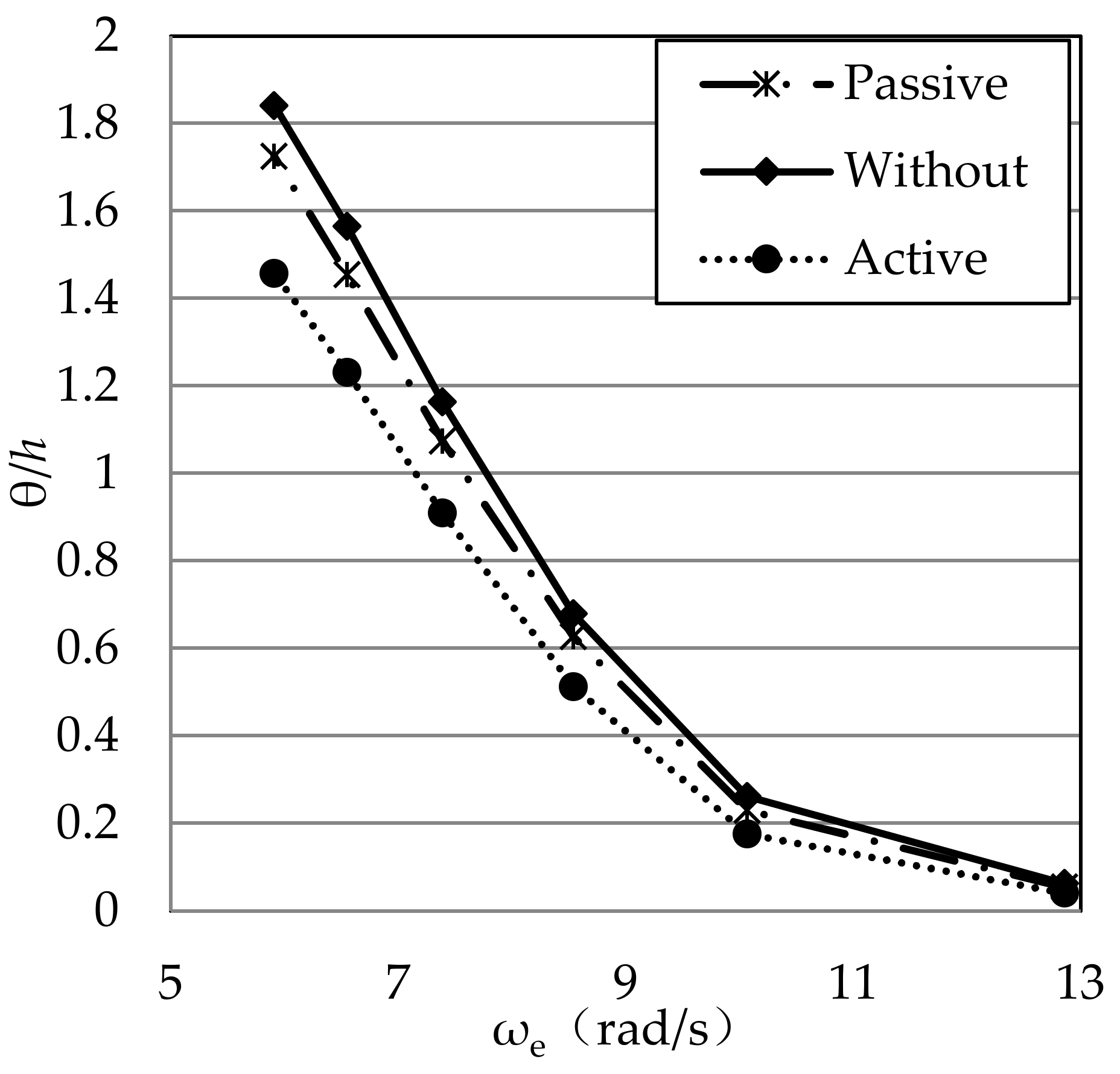
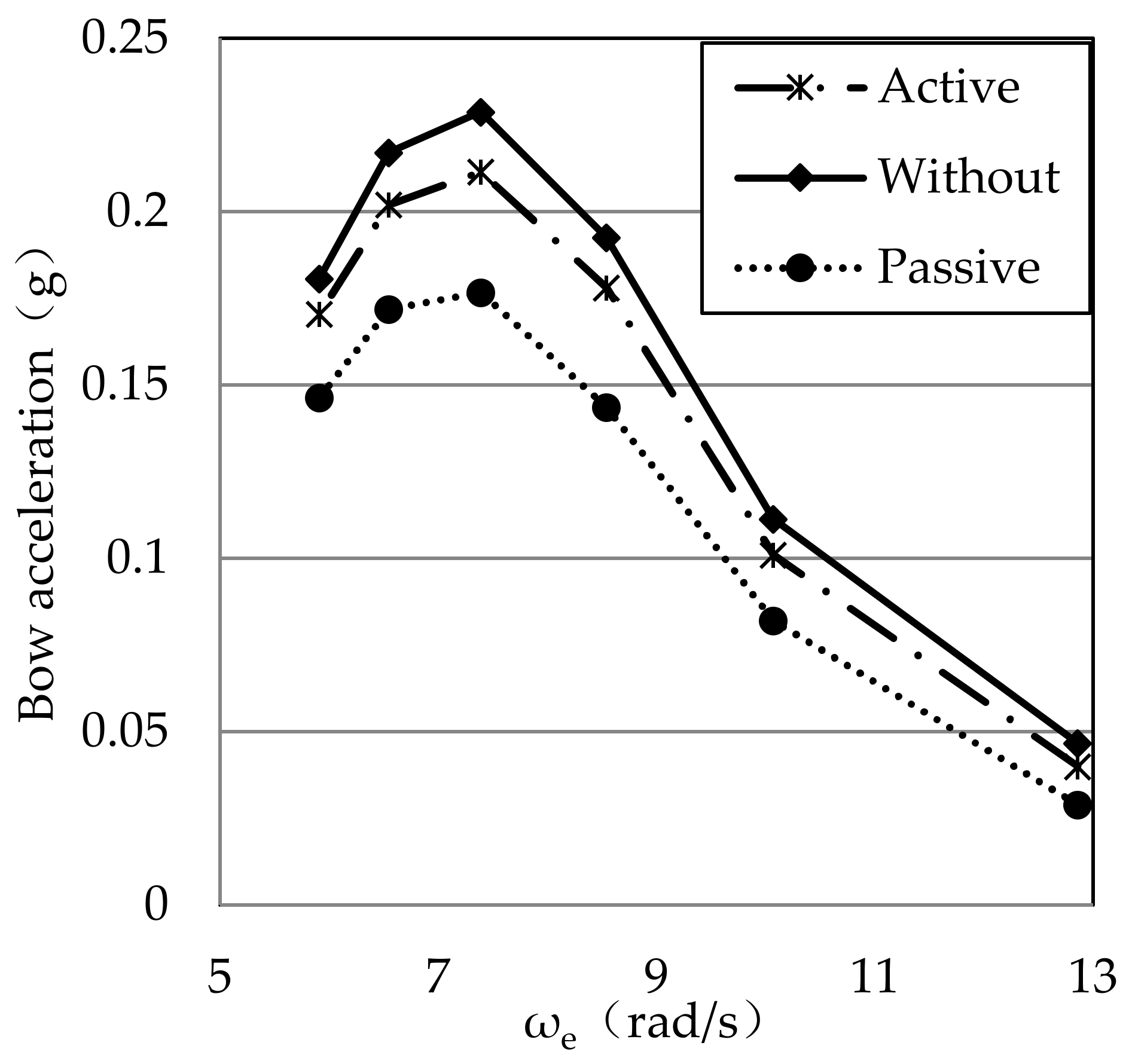
4.3. Effect of Active T-Foil
4.4. Discussion of Result
5. Conclusions and Prospects
5.1. Conclusions
- (1)
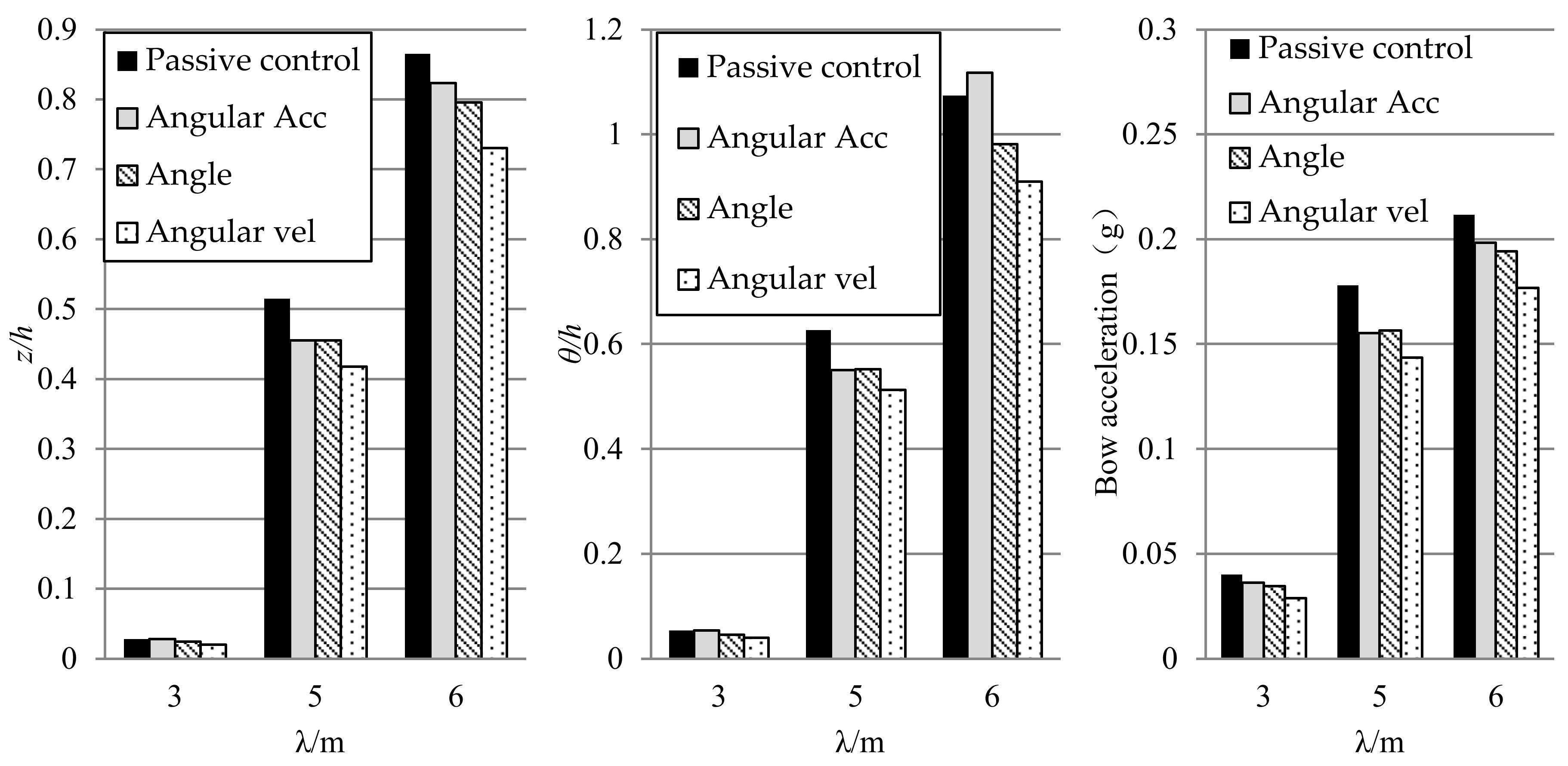
- The active T-foil improves the vertical motion performance of a high-speed monohull model under regular wave conditions using pitch angular velocity control signals. The effect is slightly better than using pitch angle or pitch angle acceleration control signals, with the motion amplitude limitation in the high-response area being particularly obvious. The vertical motion amplitude is reduced by nearly 10% via the pitch angular velocity control method compared to the other two signals. Furthermore, the effect of the pitch angle control signal is slightly better than that of the pitch angular acceleration signal.
- (2)
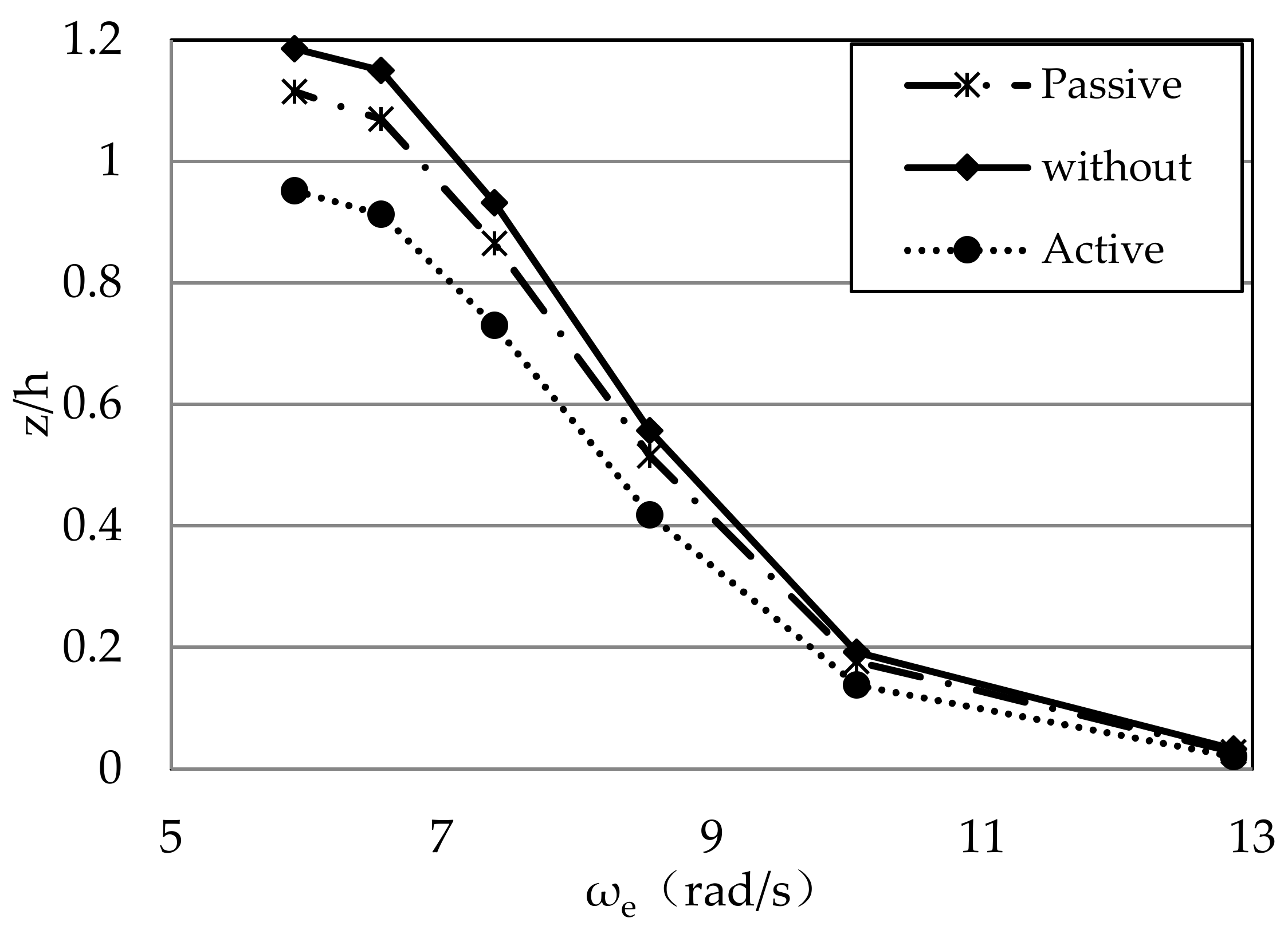
- The active T-foil reduces the longitudinal motion response (including in heave, pitch, and bow acceleration) by more than 20% in all working conditions compared to the ship model without a T-foil. Under short-wave conditions, the suppression effect can be up to 30% or more because of a low motion amplitude, and it can be between 19% and 25% in peak-response regions.
- (3)
- Unlike with the passive T-foil, at high-response conditions, the introduction of the angular velocity control signal improves the suppression effect on heave, pitch, and bow acceleration by about 14–15%; at low-response conditions, the effect of the active T-foil is enhanced by up to 20% or more.
5.2. Further Work
- (1)
- The T-foil can be installed closer to the bow, and the T-foil’s parameter needs to be further optimized.
- (2)
- The governing equation of the swing angle can be optimized using a multi-signal control and control parameters adjusted in real time.
- (3)
- The anti-roll effect when using a T-foil needs to be studied.
- (4)
- In this study, the calculation of lift force is based on a static lift force theory, neglecting unsteady hydrofoil effects. The model can be improved by introducing an unsteady airfoil theory.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Faltinsen, O.M. Hydrodynamics of High-Speed Marine Vehicles; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Tang, H.; Ren, H.; Wan, Q. Investigation of longitudinal vibrations and slamming of a trimaran in regular waves. J. Ship Res. 2017, 61, 153–166. [Google Scholar] [CrossRef]
- Davis, M.R.; Watson, N.L.; Holloway, D.S. Wave response of an 86 m high speed catamaran with active T-foils and stern tabs. Trans. R. Inst. Nav. Archit. Part A Int. J. Marit. Eng. 2003, 145, 15–34. [Google Scholar]
- Jiao, J.; Sun, S.; Li, J.; Adenya, C.A.; Ren, H.; Chen, C.; Wang, D. A comprehensive study on the seakeeping performance of high speed hybrid ships by 2.5D theoretical calculation and different scaled model experiments. Ocean Eng. 2018, 160, 197–223. [Google Scholar] [CrossRef]
- Haywood, A.; Duncan, A.; Klaka, K.; Bennett, J. The development of a ride control system for fast ferries. Control Eng. Pract. 1995, 3, 695–702. [Google Scholar] [CrossRef]
- Fang, M.C.; Shyu, W.J. Improved prediction of hydrodynamic characters of SWATH ships in wave. Proc. Natl. Sci. Counc. 1994, 18, 495–507. [Google Scholar]
- De la Cruz, J.; Aranda, J.; Giron-Sierra, J.; Velasco, F.; Esteban, S.; Diaz, J.; de Andres-Toro, B. Improving the comfort of a fast ferry. IEEE Control Syst. 2004, 24, 47–60. [Google Scholar]
- Mehr, J.A.; Ali-Lavroff, J.; Davis, M.R.; Holloway, D.; Thomas, G. An experimental investigation of ride control algorithms for high-speed catamarans Part 1: Reduction of ship motions. J. Ship Res. 2017, 61, 35–49. [Google Scholar]
- Esteban, S.; Giron-Sierra, J.M.; De Andres-Toro, B.; De La Cruz, J.M. Development of a control-oriented model of the vertical motions of a fast ferry. J. Ship Res. 2004, 48, 218–230. [Google Scholar] [CrossRef]
- Esteban, S.; Giron-Sierra, J.; De Andres-Toro, B.; Cruz, J.D.; Riola, J.M. Fast ships models for seakeeping improvement studies using flaps and T-foil. Math. Comput. Model. 2005, 41, 1–24. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Andres-Toro, B.; Esteban, S.; Recas, J.; Besada, E.; Cruz, J.M.; Maron, A. First principles modelling study for the development of a 6 DOF motions model of a fast ferry. IFAC Proc. Vol. 2004, 36, 73–78. [Google Scholar] [CrossRef]
- Giron-Sierra, J.; Andres-Toro, B.; Esteban, S.; Recas, J.; Besada, E.; De la Cruz, J.; Riola, J.M. Model based analysis of seasickness effects in a fast ferry. IFAC Proc. Vol. 2003, 36, 103–108. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Esteban, S.; Cruz, J.M.; Andres, B.D.; Riola, J.M. Fast ship’s longitudinal motion attenuation with T-Foil and flaps. In Proceedings of the Novel Vehicle Concepts and Emerging Vehicle Technologies Symposium, Ottawa, ON, Canada, 18–21 October 1999; The RTO Applied Vehicle Technology Panel: Neuilly-sur-Seine, France, 2003; pp. 26–34. [Google Scholar]
- Alavimehr, J.; Davis, M.R.; Lavroff, J.; Holloway, D.S.; Thomas, G.A. Response of a high-speed wave-piercing catamaran to an active ride control system. Trans. R. Inst. Nav. Archit. Part A Int. J. Marit. Eng. 2016, 158, A325–A335. [Google Scholar] [CrossRef]
- Alavimehr, J.; Lavroff, J.; Davis, M.R.; Holloway, D.; Thomas, G. An experimental investigation of ride control algorithms for high-speed catamarans Part 2: Mitigation of wave impact loads. J. Ship Res. 2017, 61, 51–63. [Google Scholar] [CrossRef]
- Alavimehr, J. The Influence of Ride Control System on the Motion and Load Response of a Hydroelastic Segmented Catamaran Model. Ph.D. Thesis, University of Tasmania, Hobart, Australia, 2016. [Google Scholar]
- Belibassakis, K.A.; Politis, G.K. Hydrodynamic performance of flapping wings for augmenting ship propulsion in waves. Ocean Eng. 2013, 72, 227–240. [Google Scholar] [CrossRef]
- Filippas, E.; Papadakis, G.; Belibassakis, K.A. Free-surface effects on the performance of Flapping-Foil thruster for augmenting ship propulsion in waves. J. Mar. Sci. Eng. 2020, 8, 357. [Google Scholar] [CrossRef]
- Ntouras, D.; Papadakis, G.; Belibassakis, K.A. Ship bow wings with application to trim and resistance control in calm water and in waves. J. Mar. Sci. Eng. 2022, 10, 492. [Google Scholar] [CrossRef]
- López, R.; Santos, M. Neuro-Fuzzy system to control the fast ferry vertical acceleration. In Proceedings of the 15th IFAC World Congress, Barcelona, Spain, 21–26 July 2002; pp. 319–324. [Google Scholar]
- Giron-Sierra, J.M.; Esteban, S. Frequency domain study of longitudinal motion attenuation of a fst ferry using a T-Foil. In Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, Republic of Korea, 6–11 July 2008; pp. 15004–15009. [Google Scholar]
- Wang, W.; Zong, Z.; Ni, S.; Zhang, L.; Chen, Z. Model tests of effect of interceptor on resistance of a semi-planing ship. Chin. J. Res. 2012, 7, 18–22. [Google Scholar]
- Jia, J.; Zong, Z.; Shi, H. Model experiments of a trimaran with transom stern. Int. Shipbuild. Prog. 2009, 56, 119–133. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Value |
|---|---|
| Airfoil shape | NACA0012 |
| Wingspan/mm | 240 |
| Chord length/mm | 100 |
| Aspect ratio | 2.667 |
| Max angle/(o) | ±10 |
| Max angular velocity/(Hz) | 2.4 |
| Length of vertical foil/mm | 60 |
| Index | Value |
|---|---|
| Overall length/m | 3.833 |
| Length of Waterline length/m | 3.616 |
| Breadth/m | 0.758 |
| Draught/m | 0.321 |
| Displacement/kg | 259.7 |
| Displacement (model)/kg | 152.4 |
| Designed draft/m | 0.204 |
| λ (m) | Encounter Frequency | Bare Ship | Passive Control | % |
|---|---|---|---|---|
| 3 | 12.86 | 0.0322 | 0.0277 | 13.98 |
| 4 | 10.07 | 0.1913 | 0.176 | 8 |
| 5 | 8.54 | 0.5565 | 0.515 | 7.46 |
| 6 | 7.39 | 0.9322 | 0.865 | 7.21 |
| 7 | 6.55 | 1.1496 | 1.07 | 6.92 |
| 8 | 5.91 | 1.1861 | 1.115 | 5.99 |
| λ (m) | Encounter Frequency | Bare Ship | Passive Control | % |
|---|---|---|---|---|
| 3 | 12.86 | 0.171 | 0.148 | 13.45 |
| 4 | 10.07 | 0.54 | 0.475 | 12.04 |
| 5 | 8.54 | 1.125 | 1.037 | 7.82 |
| 6 | 7.39 | 1.605 | 1.482 | 7.66 |
| 7 | 6.55 | 1.851 | 1.72 | 7.08 |
| 8 | 5.91 | 1.905 | 1.785 | 6.30 |
| λ (m) | Encounter Frequency | Bare Ship | Passive Control | % |
|---|---|---|---|---|
| 3 | 12.86 | 0.0467 | 0.04 | 14.35 |
| 4 | 10.07 | 0.1114 | 0.101 | 9.34 |
| 5 | 8.54 | 0.1925 | 0.178 | 7.53 |
| 6 | 7.39 | 0.2288 | 0.2115 | 7.56 |
| 7 | 6.55 | 0.217 | 0.202 | 6.91 |
| 8 | 5.91 | 0.1807 | 0.1705 | 5.64 |
| Wavelength λ/m | Encounter Frequency ωe/rad | Response in Passive Control /m | Response in Angle Control /m | Response in Angular Velocity Control/m | Response in Angular Acceleration Control/m | Anti-Heave Effect/% | ||
|---|---|---|---|---|---|---|---|---|
| Angle Control | Angular Velocity Control | Angular Acceleration. Control | ||||||
| 3 | 12.860 | 0.020 | 0.028 | 0.025 | 0.028 | 11.303 | 28.195 | −0.802 |
| 5 | 8.540 | 0.418 | 0.515 | 0.455 | 0.455 | 11.682 | 18.913 | 11.604 |
| 6 | 7.390 | 0.730 | 0.865 | 0.795 | 0.823 | 8.062 | 15.618 | 4.808 |
| Wavelength λ/m | Encounter Frequency ωe/rad | Response in Passive Control /m | Response in Angle Control /m | Response in Angular Velocity Control/m | Response in Angular Acceleration Control/m | Anti-Heave Effect/% | ||
|---|---|---|---|---|---|---|---|---|
| Angle Control | Angular Velocity Control | Angular Acceleration. Control | ||||||
| 3 | 12.860 | 0.040 | 0.054 | 0.045 | 0.054 | 15.747 | 25.811 | −0.789 |
| 5 | 8.540 | 0.512 | 0.626 | 0.552 | 0.550 | 11.829 | 18.228 | 12.100 |
| 6 | 7.390 | 0.910 | 1.074 | 0.981 | 1.117 | 8.612 | 15.283 | −4.009 |
| Wavelength λ/m | Encounter Frequency ωe/rad | Response in Passive Control /m | Response in Angle Control /m | Response in Angular Velocity Control/m | Response in Angular Acceleration Control/m | Anti-Heave Effect/% | ||
|---|---|---|---|---|---|---|---|---|
| Angle Control | Angular Velocity Control | Angular Acceleration. Control | ||||||
| 3 | 12.86 | 0.029 | 0.040 | 0.035 | 0.036 | 13.575 | 27.775 | 9.395 |
| 5 | 8.54 | 0.144 | 0.178 | 0.156 | 0.155 | 12.108 | 19.354 | 12.773 |
| 6 | 7.39 | 0.177 | 0.212 | 0.194 | 0.198 | 8.239 | 16.468 | 6.286 |
| λ (m) | C2 (kg∙m2/(s∙rad)) | C1 (kg∙m2/(s2∙rad)) | C3 (kg∙m2/(rad)) |
|---|---|---|---|
| 3 | 37.522 | 634.031 | 2.705 |
| 4 | 26.213 | --- | --- |
| 5 | 16.143 | 184.188 | 2.234 |
| 6 | 15.183 | 157.068 | 2.967 |
| 7 | 17.661 | --- | --- |
| 8 | 17.853 | --- | --- |
| λ (m) | Encounter Frequency | Active Control | Passive Control | Bare Ship | Anti-Vertical Motion Effect | |
|---|---|---|---|---|---|---|
| Active% | Passive% | |||||
| 3 | 12.86 | 0.020 | 0.028 | 0.032 | 38.230 | 13.975 |
| 4 | 10.07 | 0.138 | 0.176 | 0.191 | 28.113 | 7.998 |
| 5 | 8.54 | 0.418 | 0.515 | 0.557 | 24.960 | 7.457 |
| 6 | 7.39 | 0.730 | 0.865 | 0.932 | 21.701 | 7.209 |
| 7 | 6.55 | 0.914 | 1.070 | 1.150 | 20.538 | 6.924 |
| 8 | 5.91 | 0.952 | 1.115 | 1.186 | 19.720 | 5.994 |
| λ (m) | Encounter Frequency | Active Control | Passive Control | Bare Ship | Anti-Vertical Motion Effect | |
|---|---|---|---|---|---|---|
| Active% | Passive% | |||||
| 3 | 12.86 | 0.110 | 0.148 | 0.171 | 35.789 | 13.450 |
| 4 | 10.07 | 0.363 | 0.475 | 0.540 | 32.833 | 12.037 |
| 5 | 8.54 | 0.848 | 1.037 | 1.125 | 24.624 | 7.822 |
| 6 | 7.39 | 1.256 | 1.482 | 1.605 | 21.776 | 7.664 |
| 7 | 6.55 | 1.455 | 1.720 | 1.851 | 21.378 | 7.077 |
| 8 | 5.91 | 1.508 | 1.785 | 1.905 | 20.819 | 6.299 |
| λ (m) | Encounter Frequency | Active Control | Passive Control | Bare Ship | Anti-Vertical Motion Effect | |
|---|---|---|---|---|---|---|
| Active% | Passive% | |||||
| 3 | 12.86 | 0.029 | 0.040 | 0.047 | 38.137 | 14.347 |
| 4 | 10.07 | 0.082 | 0.101 | 0.111 | 26.320 | 9.336 |
| 5 | 8.54 | 0.144 | 0.178 | 0.193 | 25.429 | 7.532 |
| 6 | 7.39 | 0.177 | 0.212 | 0.229 | 22.784 | 7.561 |
| 7 | 6.55 | 0.172 | 0.202 | 0.217 | 20.783 | 6.912 |
| 8 | 5.91 | 0.146 | 0.171 | 0.181 | 19.065 | 5.645 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zhang, D.; Wang, Y.; Zong, Z.; Wu, Z. Model Experimental Study on a T-Foil Control Method with Anti-Vertical Motion Optimization of the Mono Hull. J. Mar. Sci. Eng. 2023, 11, 1551. https://doi.org/10.3390/jmse11081551
Sun Y, Zhang D, Wang Y, Zong Z, Wu Z. Model Experimental Study on a T-Foil Control Method with Anti-Vertical Motion Optimization of the Mono Hull. Journal of Marine Science and Engineering. 2023; 11(8):1551. https://doi.org/10.3390/jmse11081551
Chicago/Turabian StyleSun, Yifang, Dapeng Zhang, Yiqun Wang, Zhi Zong, and Zongduo Wu. 2023. "Model Experimental Study on a T-Foil Control Method with Anti-Vertical Motion Optimization of the Mono Hull" Journal of Marine Science and Engineering 11, no. 8: 1551. https://doi.org/10.3390/jmse11081551
APA StyleSun, Y., Zhang, D., Wang, Y., Zong, Z., & Wu, Z. (2023). Model Experimental Study on a T-Foil Control Method with Anti-Vertical Motion Optimization of the Mono Hull. Journal of Marine Science and Engineering, 11(8), 1551. https://doi.org/10.3390/jmse11081551