1. Introduction
AUVs have great potential application prospects in the exploitation of marine resources [
1,
2]. The energy issue is the main factor restricting the long-range continuing operation of underwater vehicles in the ocean. At present, two main methods for supplying electric energy to underwater vehicles are employed: the first is to use mechanical equipment to salvage the underwater vehicle and manually replace the battery; the other method is to use a wet-mate charging connector on an underwater power supply platform to charge the AUV [
3]. The former method has a series of shortcomings such as high labor cost, low degree of automation, and poor concealment in salvage operations, and a lot of electrical energy is wasted on the round-trip journey of the underwater vehicles, resulting in low energy utilization rate. The latter method requires precise docking and complex insertion and extraction operations, which cause an issue with wearing; additionally, the price of wet-mate connectors is rather high. Magnetic coupling WPT based on electromagnetic induction is a new type of power transmission method that has been emerging and developing over the last two decades, and which possesses the advantages of reliability and safety [
4,
5]. In WPT systems, the physical connections between the power sending side and the power receiving side are eliminated, effectively avoiding safety hazards such as the leakage, sparks, and carbon deposition characterizing traditional contact power transmission methods, thus enhancing the freedom and safety of electrical energy transmission. WPT technology has gradually been maturing over the last decade, and it has been extensively adopted in fields such as electric vehicles, biomedical implants, industrial manufacturing, and smart homes [
6,
7,
8]. The use of WPT technology in the marine environment for power supply of underwater vehicles does not require direct electrical connection between the AUV and the submarine base station, thus avoiding the complex operation process, strict positioning accuracy requirements, and safety hazards that characterize wet-mate charging connectors, giving this method broad application prospects [
9,
10,
11].
The electromagnetic coupling mechanism is a crucial element of WPT systems, and the magnetic coupling mechanism determines the vital characteristics of the system, such as power transmission efficiency, output power and transmission distance [
12,
13,
14]. Due to the unique structure of AUVs, it is also necessary to consider the docking process between the underwater charging base station and AUVs, as well as the position deviation caused by seawater when designing a WPT system for AUVs. Researchers have designed various coupler structures for AUV WPT systems. Yan et al. [
15] developed a coupler with a curly coil structure, and both unipolar and bipolar curly coils were studied. Compared with the unipolar structure, the bipolar curly coil was able to mitigate the electromagnetic interference of the AUV. A 1000 W experimental platform was established, and the power transmission efficiency reached 95%. In [
16], a magnetic coupler with a coaxial solenoid coil structure suitable for AUV was proposed with a maximum output power of 300 W and a power transmission efficiency of about 63~77%. The WPT system was improved through the introduction of an LCC-S topology; the output power increased to 882 W, and the efficiency was enhanced to 81.3% [
17]. Zeng et al. [
18] developed a hybrid transmitter structure consisting of a conical spiral coil and a planar spiral coil. The receiver was a solenoid coil, which was wound around the AUV. The magnetic coupler structure could form a circular uniform magnetic field; thus greatly improving the misalignment tolerance of WPT system. A novel three-phase coil structure composed of three pairs of transmitters and receivers was presented in [
19]; the magnetic flux density produced by the coupling coil structure was centralized within the magnetic coupler, thus avoiding the electronic components in the AUV being subjected to electromagnetic interference. Yan et al. [
20] designed a magnetic coupler for an AUV wireless charging system, where the coupling structure consisted of a transmitting coil and two reverse-wound double-layer receiving coils; it showed great angular tolerance to rotational offsets. In [
21], a coupling mechanism was proposed in which the transmitter was composed of circularly distributed multiple coils connected in series, and the receiver consisted of two vertical cross coils; the proposed coupling structure had good tolerance to rotational misalignments. In order to reduce the eddy current loss, Zhang et al. [
22] put forward a new magnetic structure for AUVs, consisting of two transmitting coils and a receiving coil; the eddy current loss decreased by 50% compared to the conventional one-transmitter-to-one-receiver structure. However, two main challenges have restricted the applications of the above coupling structures in WPT systems for AUVs. On one hand, some coupling structures are incompatible with AUVs’ profiles, resulting in inevitable alterations, which may cause harmful effects to the hydrodynamic characteristics and reduce the compressive strength of AUVs. On the other hand, some uncertain misalignments can easily be caused by docking errors or seawater flow vibration in the marine environment; it is difficult to design a magnetic coupler that simultaneously possesses high tolerance to radial, axial, and rotational misalignments.
Yao et al. [
23] proposed a circular-cylindrical magnetic coupling structure consisting of a planar spiral transmitting coil and a solenoid receiving coil. It was verified that the leakage magnetic flux at both ends of the solenoid coil was small, and the coupling structure was suitable for mid-range power transmission scenarios. Cai et al. [
24] developed a magnetic structure consisting of a combined arc-shaped bipolar transmitting coil and a compact dipole receiving coil for AUV wireless charging systems. Stable magnetic coupling against three-dimension misalignments was established by using horizontal magnetic flux, effectively improving the WPT system’s misalignment tolerance against rotational, axial and radial offsets. It was verified by experiment that the maximum output power reached 1.05 kW, and the dc-dc efficiency was 95.1%.
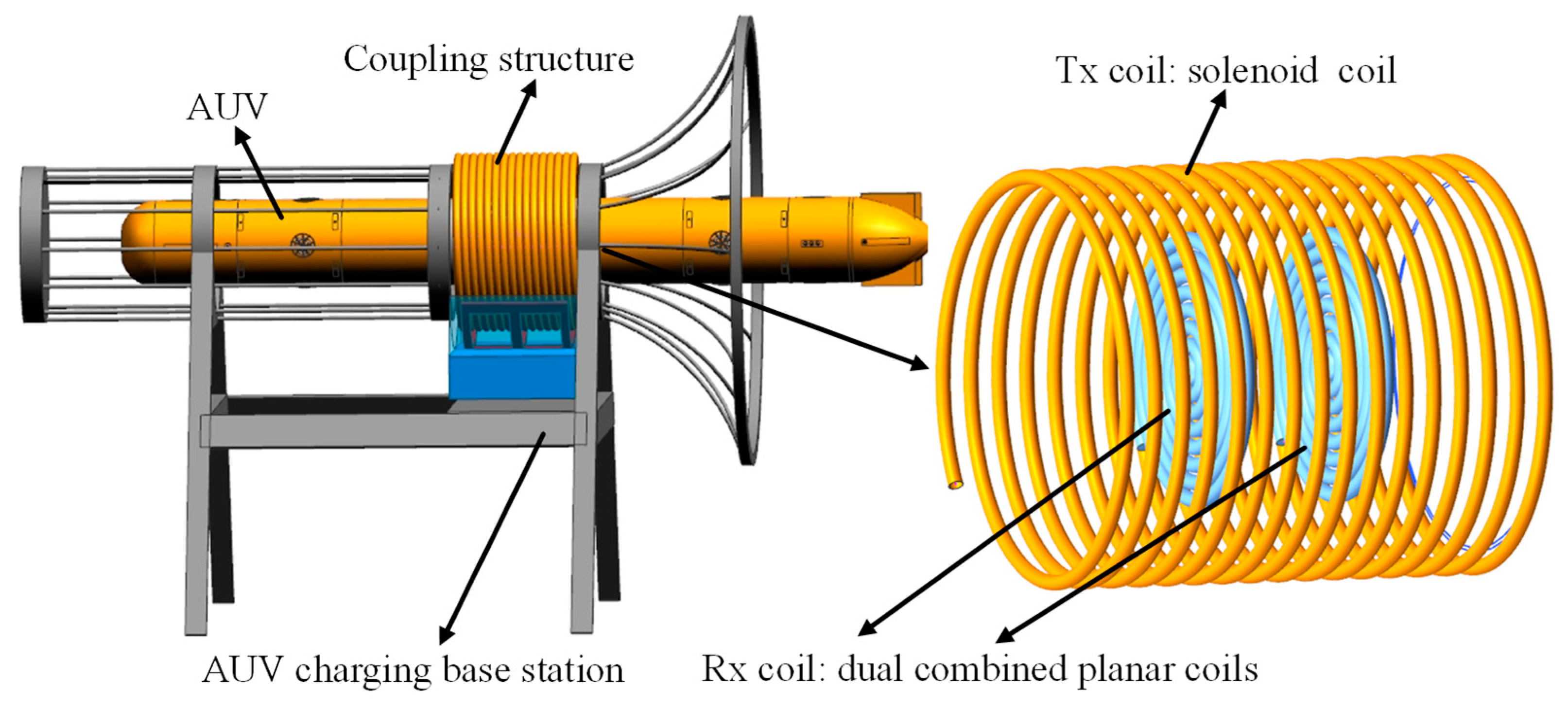
Under the dynamic underwater environment, impacts on wireless AUV charging systems caused by seawater flow are inevitable; in order to address the issue of reduced power transmission efficiency resulting from misalignments in underwater WPT systems, inspired by the combined coils idea and circular-cylindrical magnetic coupler mentioned in [
23], this paper proposes a novel magnetic coupling structure composed of a solenoid coil as the transmitting coil and dual combined planar coils as the receiving coil. The proposed magnetic coupling structure is shown in
Figure 1. The solenoid transmitting coil is wound in the submarine base station, and the coils in the dual combined planar receiving coil are installed in the AUV. This novel magnetic coupling structure enables a stable power transmission efficiency and output power to be achieved in a wireless charging system for AUVs, thus enhancing the misalignment tolerance of the WPT system.
This paper is organized as follows.
Section 2 presents the theoretical analysis of the equivalent circuit model. The magnetic field distribution of the coupling structure is given in
Section 3, and the parameters of the coupling structure are optimized. An experimental system is built to confirm the effectiveness of the presented magnetic coupler in
Section 4.
Section 5 discusses the advantages of and main issues with this novel coupling structure in WPT systems for AUVs. Finally, the conclusions are drawn in
Section 6.
2. Circuit Model Analysis
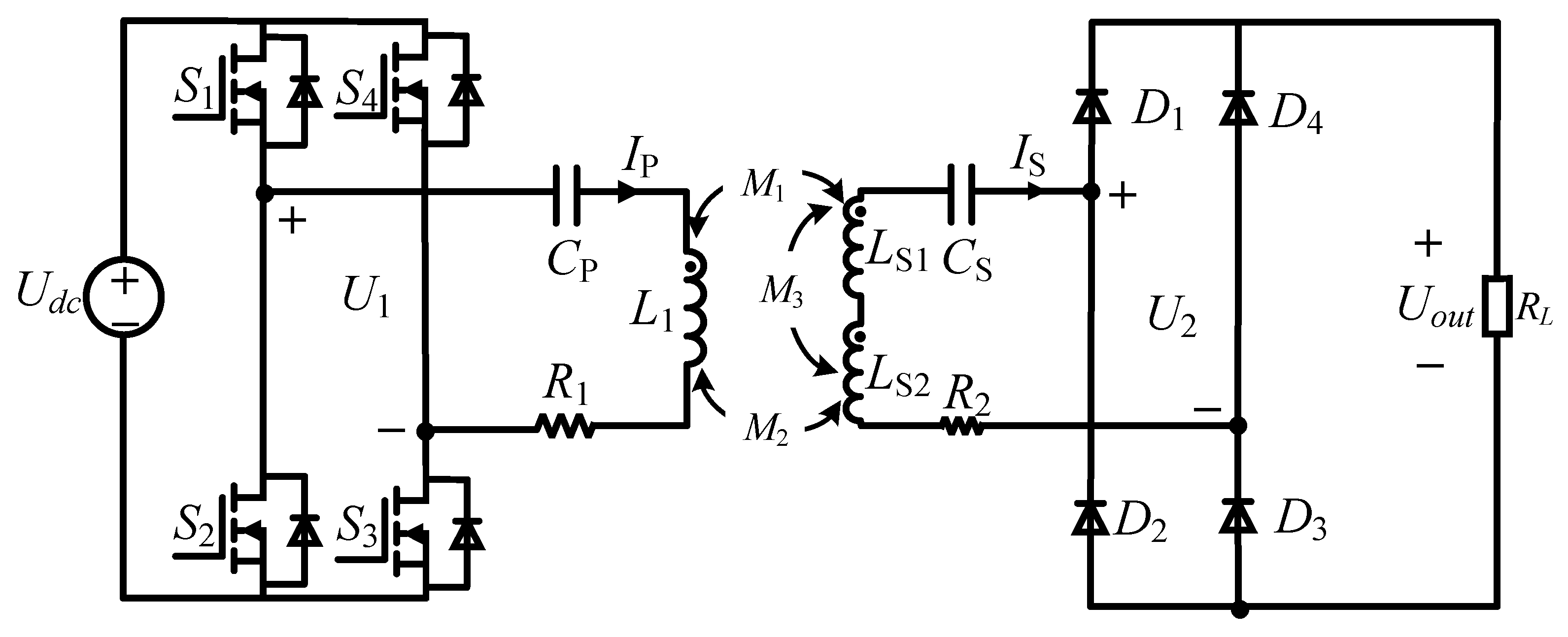
Figure 2 presents the equivalent circuit of the WPT system with series–series compensation. On the primary side, a full-bridge inverter consisting of four MOSFETs (
S1-
S4) is utilized to produce ac power through the input dc voltage
Udc. The magnetic coupler is composed of a transmitting coil
L1 and receiving coils
LS1 and
LS2.
M1 and
M2 represent the coupling between the transmitting coil and the dual receiving coil, respectively, and
M3 represents the coupling between the dual receiving coils
LS1 and
LS2. Owing to the electromagnetic induction of the coupling structure, the electrical power can be transmitted wirelessly from the power sending side to the receiving side. The compensation capacitors
CP and
CS are chosen to achieve a resonant state with primary inductance and secondary inductance, respectively. On the secondary side, four DIODEs (
D1-
D4) make up the rectifier, and it is employed to convert ac power to dc voltage.
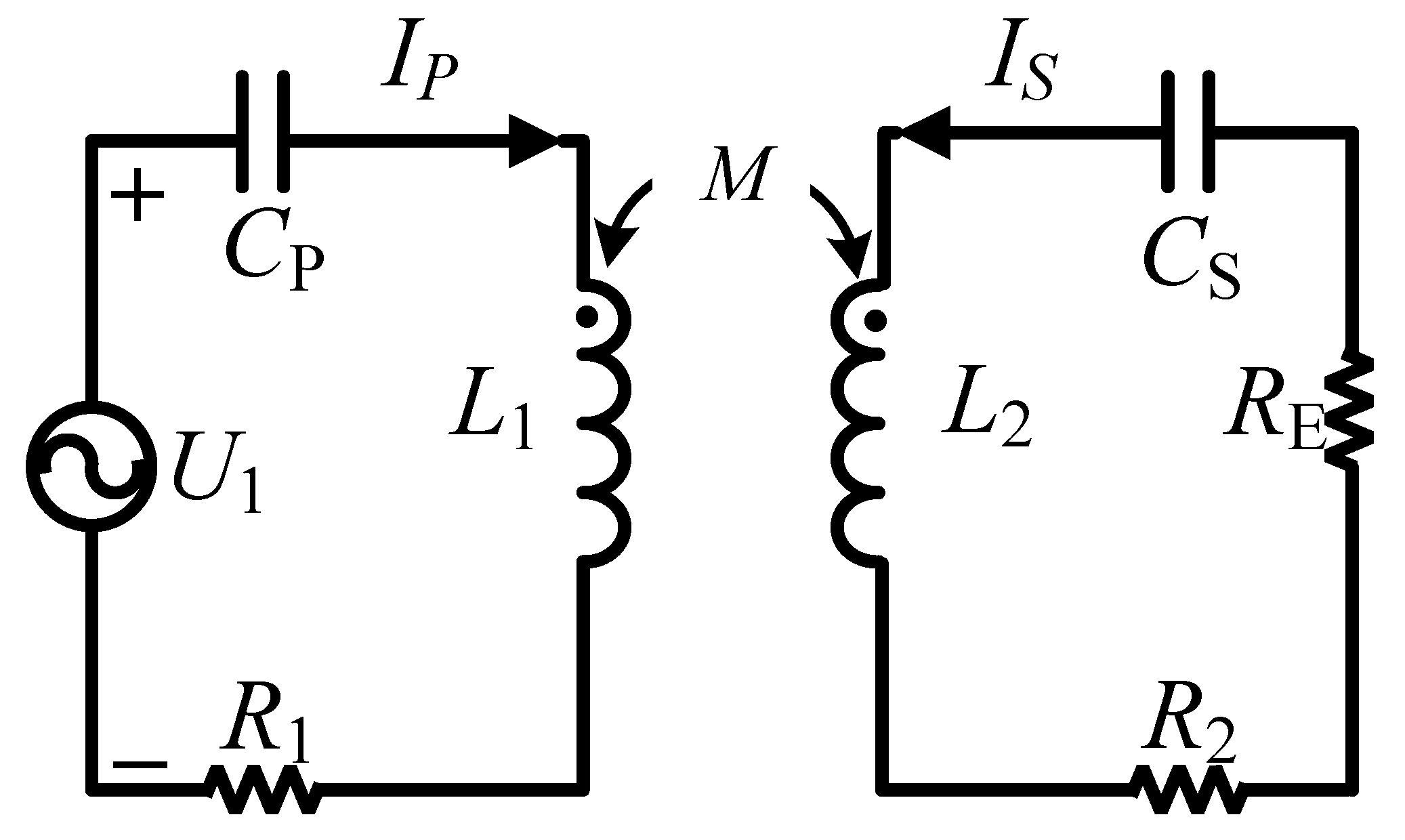
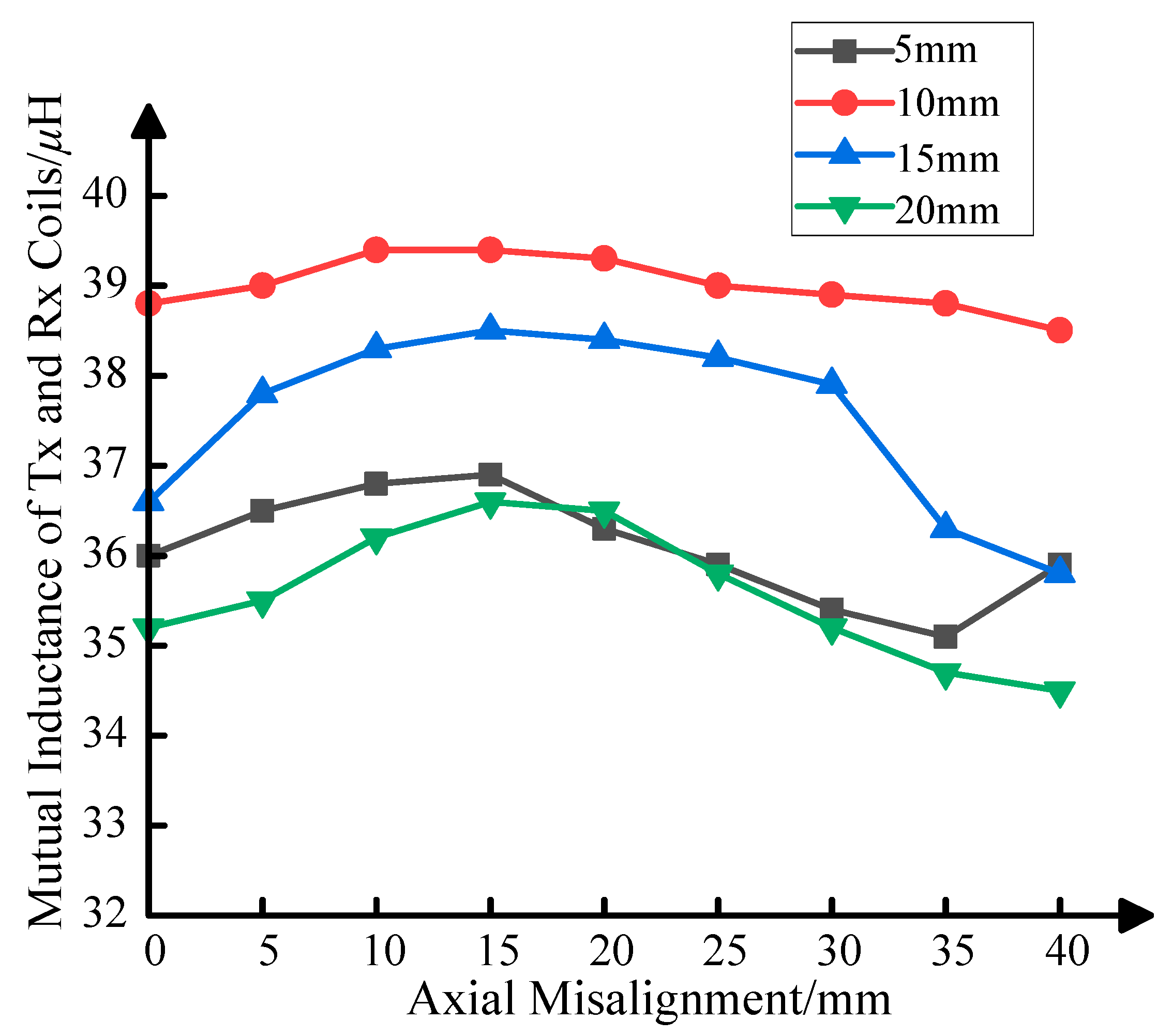
The total mutual inductance between the transmitting coil and the dual receiving coil remains at a constant value when axial misalignment occurs; on the secondary side, the dual combined receiving coil can be equivalent to a coil with a self-inductance of
LS1 +
LS2 − 2
M3. To simplify the analysis, a new coil with a self-inductance of
L2 =
LS1 +
LS2 − 2
M3 is introduced to serve as an equivalent replacement for the dual combined planar coils, and
Figure 3 shows the simplified equivalent circuit.
According to Kirchhoff’s voltage law, the expressions can be acquired as follows.
where
IP and
IS are the current flow through the transmitting coil and receiving coil, ω is the angular frequency of the WPT system,
U1 is the input voltage, and
R1 and
R2 are the internal resistance of the transmitting coil and receiving coil, respectively.
RE = 8
RL/π
2 is the equivalent load resistance.
When the WPT system is in the resonant state, the following equation can be obtained.
Then, Equation (1) can be simplified to
IP and
IS can be obtained from Equation (3) as follows:
Actually, in the whole WPT system, compared with the equivalent load resistance
RE, the internal resistance of the transmitting coil and receiving coil
R1 and
R2 are negligible. Thus, the current of the primary side
IP and the current of the secondary side
IS can be expressed as
According to Equation (5), the secondary current IS, namely the output current, is independent of load resistance, and it is related to the mutual inductance between the transmitting coil and the receiving coil. The output of the WPT system is characterized by constant current.
The output power of the WPT system
Pout and the power transmission efficiency
η can be calculated using (6) and (7), respectively.
It can be seen from Equations (6) and (7) that both the output power Pout and power transmission efficiency η of the WPT system are influenced by the mutual inductance of the magnetic coupler. If the variation in mutual inductance could be reduced as the axial misalignment emerges, the stability of the WPT system’s output characteristics would be enhanced.
4. Experimental Verification
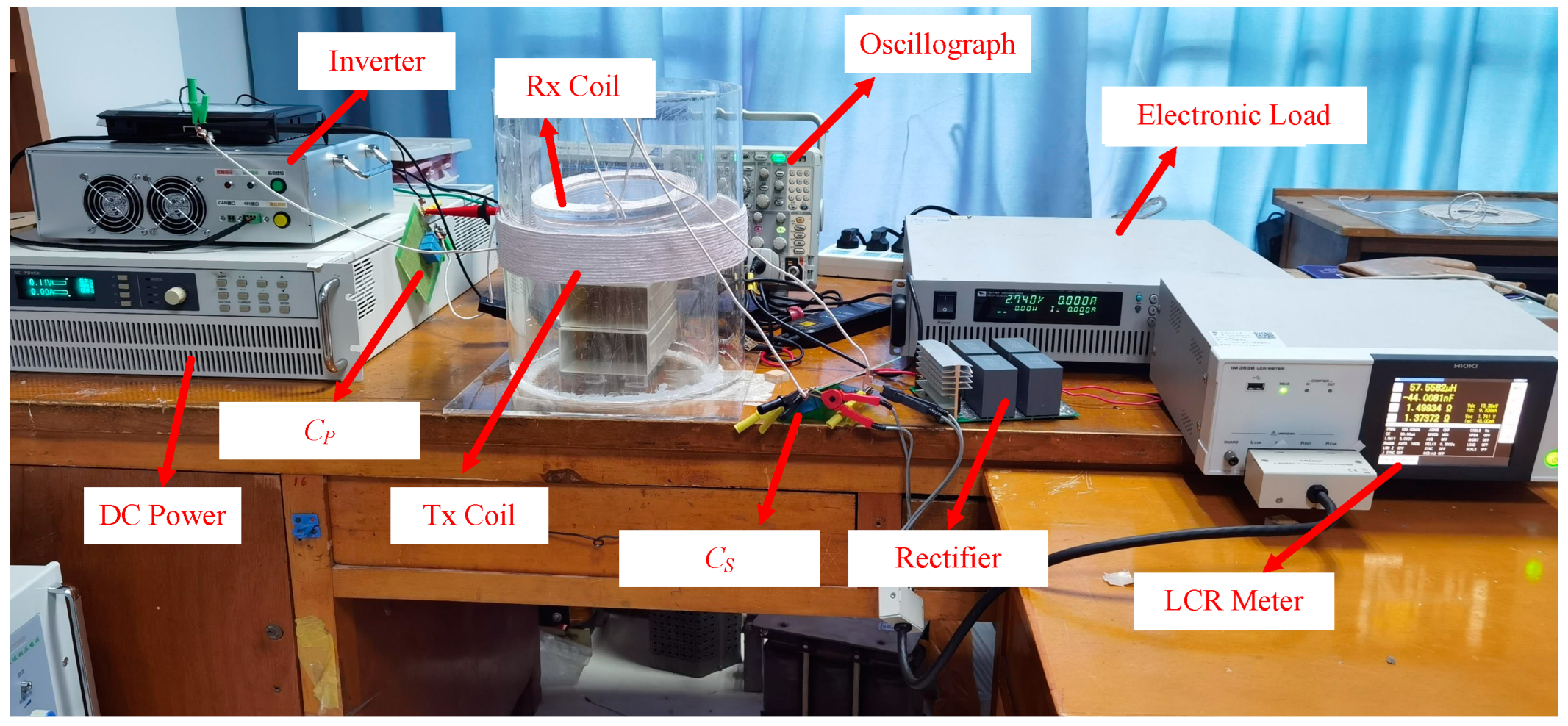
A WPT prototype is set up to verify the output characteristic of the presented magnetic coupler, as shown in
Figure 10. AWG 38 litz wires with 400 strands are utilized to wind the magnetic coils. We use electronic load to emulate the battery, the load of which changes during the charging process. The parameters of the transmitting coil and the receiving coil are measured using the LCR meter;
Table 2 presents the parameters of the WPT system.
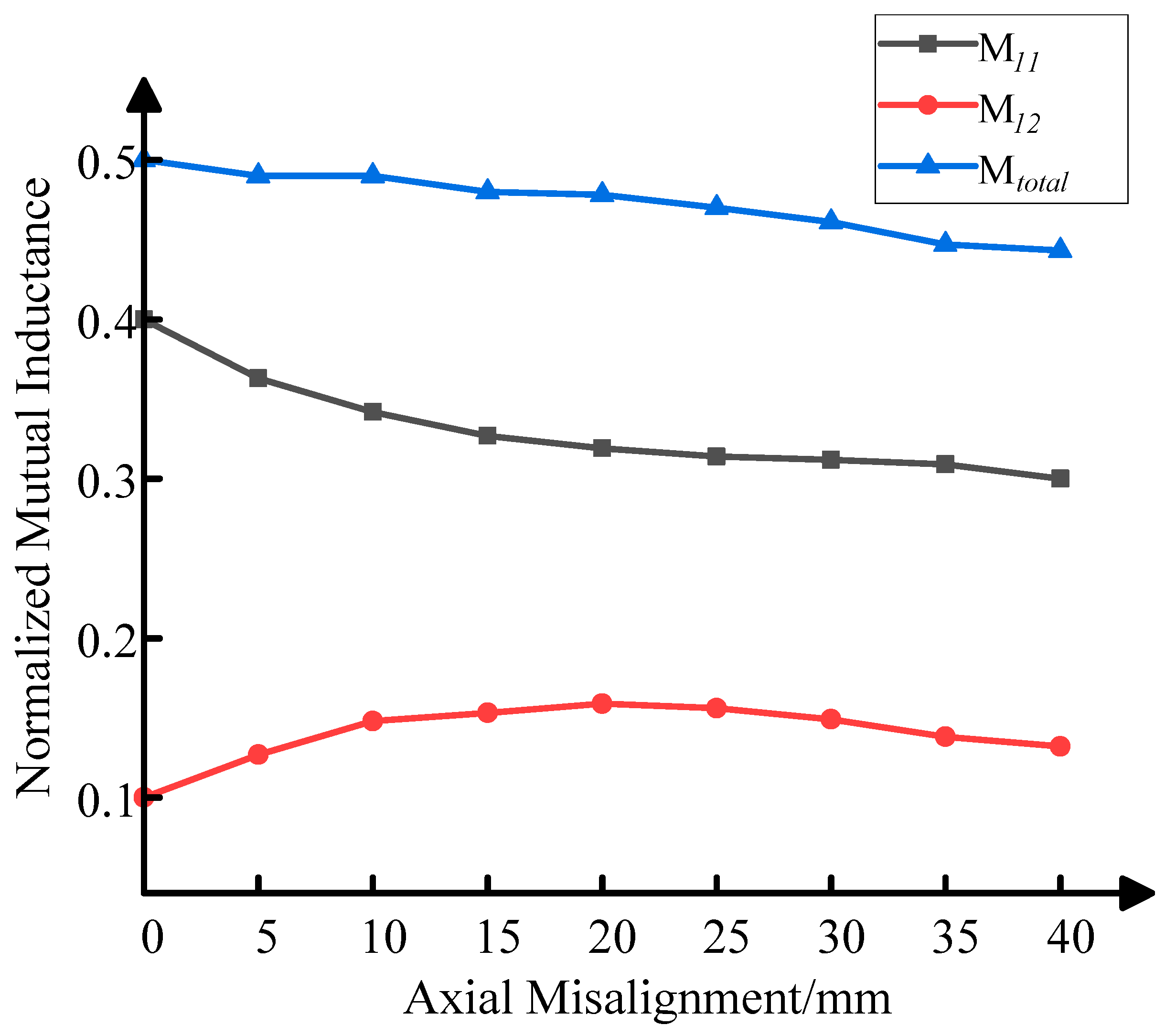
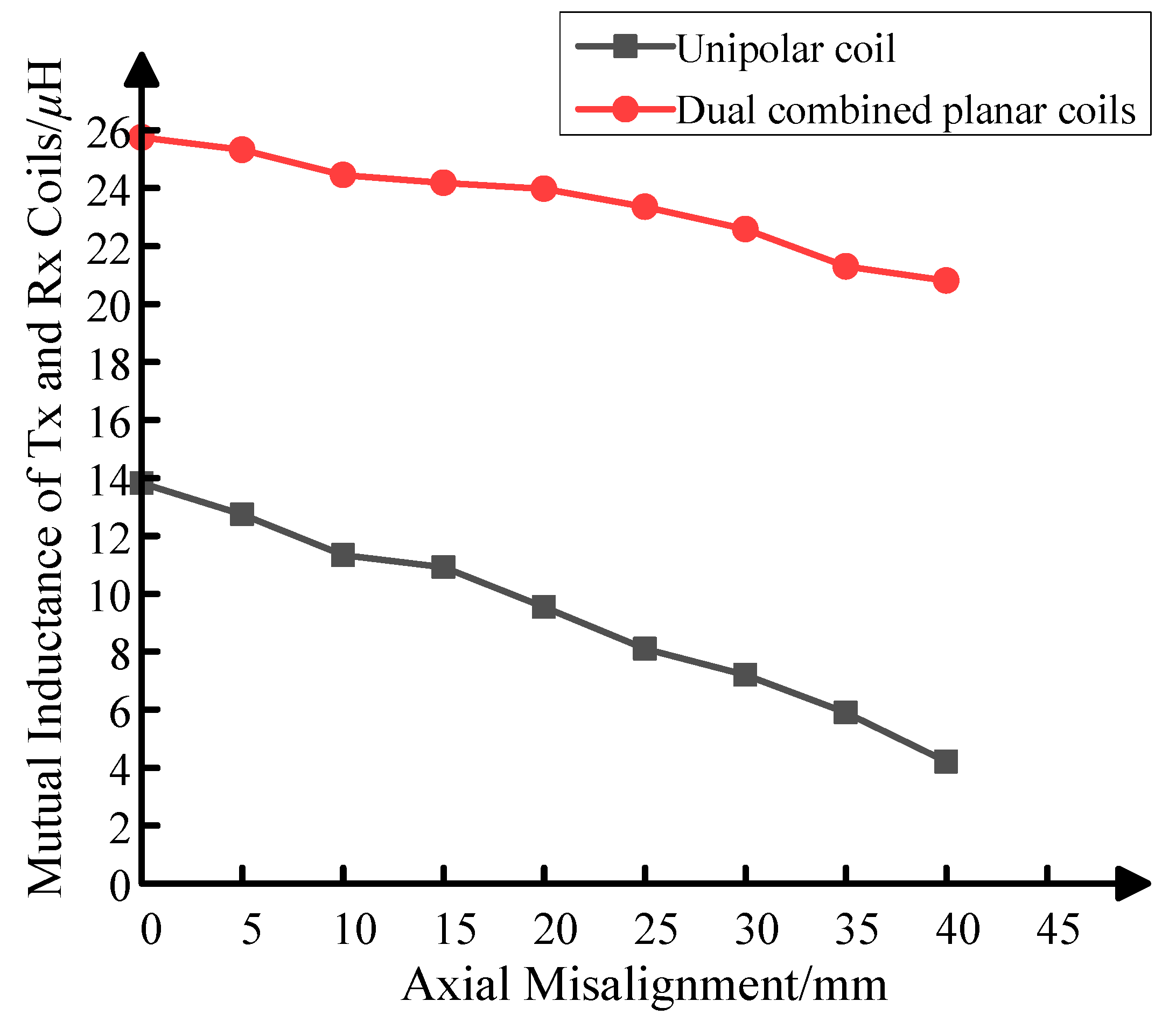
The variation in the mutual inductance of the proposed magnetic coupler with changes in axial offset distance is shown in
Figure 11. When the axial offset distance is 0, the maximum mutual inductance is 25.745 μH. In comparison with the solenoid coil to unipolar planar coil coupling structure, the mutual inductance of the proposed magnetic coupler (solenoid coil to dual combined planar coil) is increased by double. When the axial misalignment is increased from 0 to 40 mm, the mutual inductance of the proposed magnetic coupler with the dual combined planar coil decreases more slowly compared to with the unipolar coil. When the maximum axial offset is 40 mm, the mutual inductance is 20.8 μH.
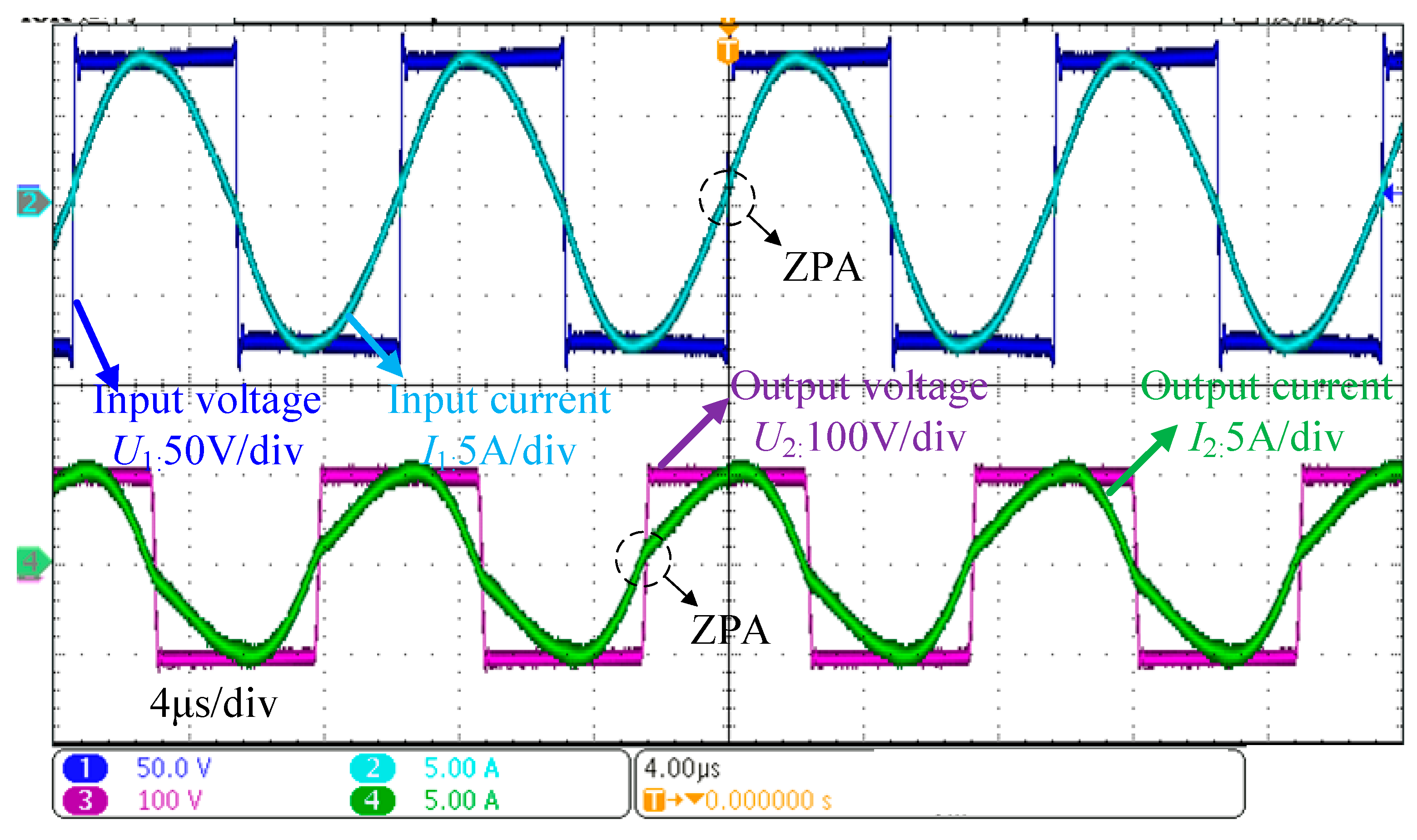
Figure 12 shows the waveforms of the input/output voltage and current of the proposed WPT system. On the primary side, the input voltage keeps the same phase with the input current, and on the secondary side, the output voltage is in phase with the output current. This indicates that both the primary side and the secondary side are in a resonant state.
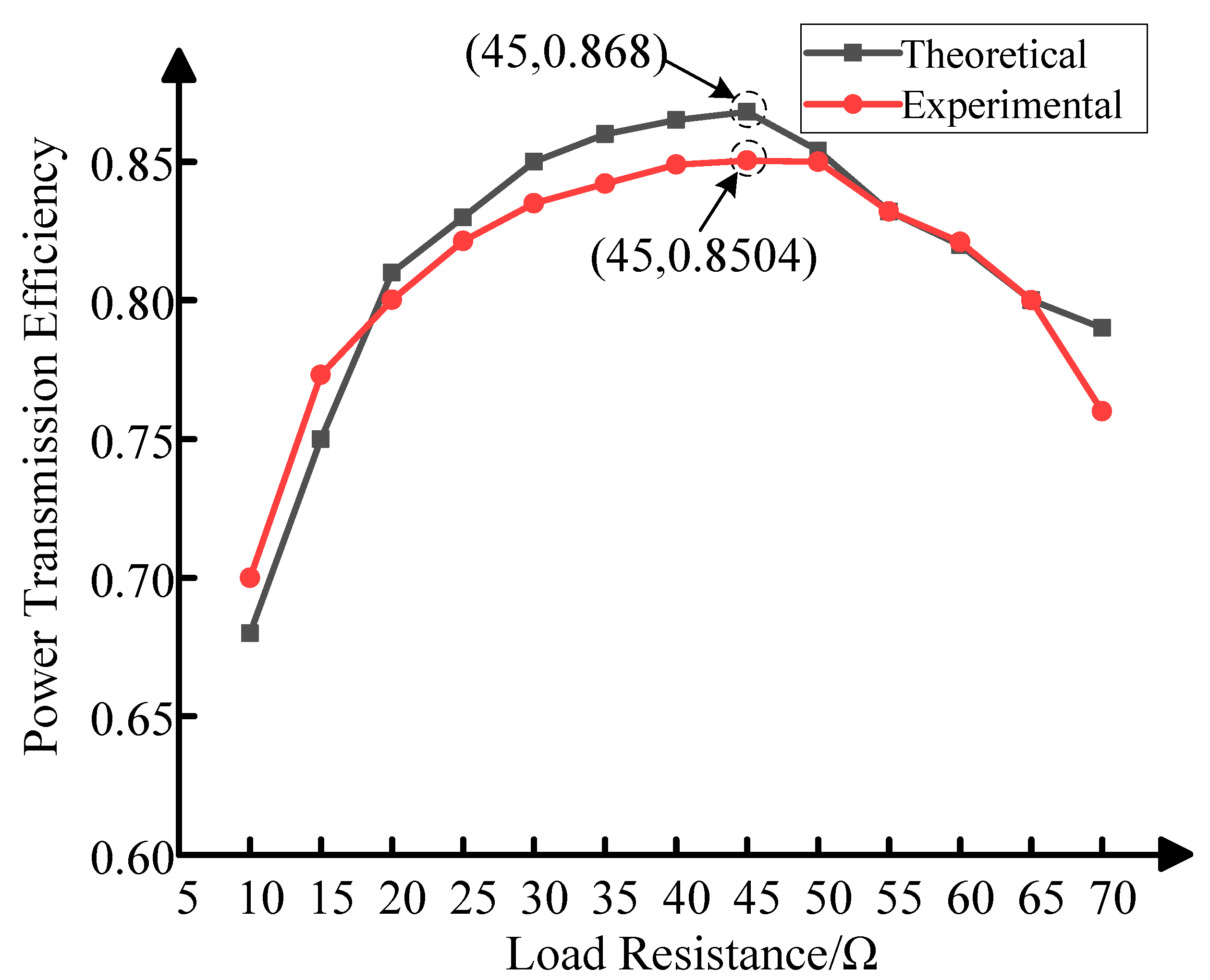
The variation in the power transmission efficiency of the WPT system with the proposed coupling structure with the load resistance is presented in
Figure 13. As is demonstrated in
Figure 13, the power transmission efficiency increases from 69.9% to the maximum value of 85.04% as the load resistance increases from 10 Ω to 45 Ω; the power transmission efficiency then decreases when the load resistance increases from 45 Ω to 70 Ω. The experimental results are close to those of the theoretical analysis. Therefore, the optimal load resistance for the proposed WPT system is 45 Ω.
In order to emulate the seawater environment, saltwater with a salinity of 4‰ is employed to fill the gap between the cylindrical hulls.
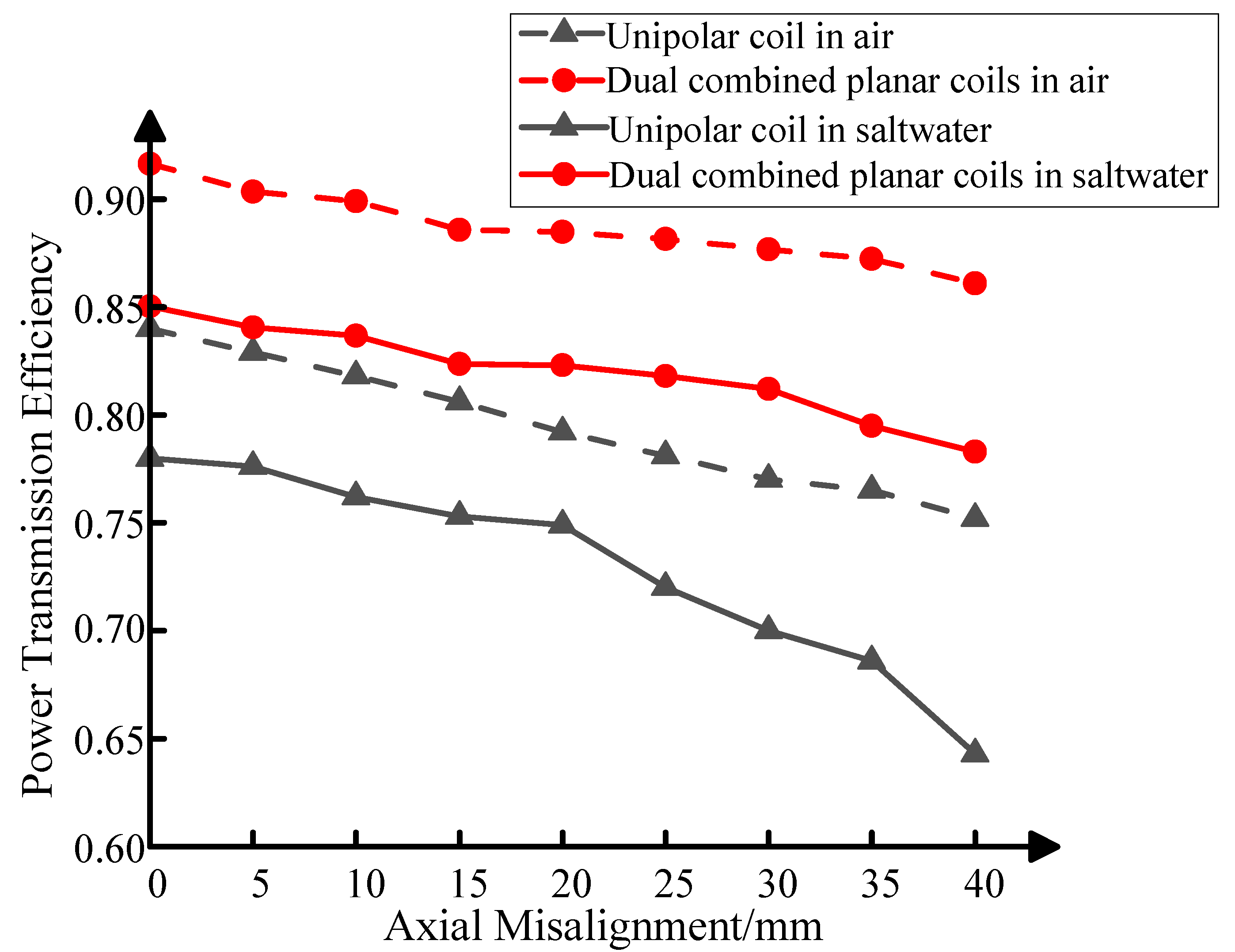
Figure 14 shows the power transmission efficiency of the WPT system versus axial misalignment; a comparison test of the solenoid-unipolar planar coil coupling structure is added to validate the output characteristics of the proposed magnetic coupler.
As can be seen from
Figure 14, the power transmission efficiency of the magnetic coupling structure with the dual combined planar coil in air is higher than the coupling structure with the unipolar coil. When the axial misalignment is increased from 0 to 40 mm, the power transmission efficiency of the WPT system with the proposed dual combined planar coil decreases from 91.64% to 86.1%, but for the WPT system with the solenoid-unipolar planar coil coupling structure, the power transmission efficiency drops from 84% to 75.2%. This indicates that the introduction of the dual combined planar receiving coil causes the power transmission efficiency of WPT system to slowly decrease with increasing axial misalignment. The proposed coupling structure has good tolerance to axial misalignment.
The variation in the power transmission efficiency of the WPT system with the dual combined planar coil and the unipolar planar coil with axial misalignment in saltwater is also shown in
Figure 14. As is demonstrated in
Figure 14, when the axial misalignment increases from 0 to 40 mm, the power transmission efficiency of the WPT system with the unipolar planar coil in saltwater decreases from 78% to 64.3%; in contrast, the power transmission efficiency of the WPT system with the proposed dual combined planar receiving coil drops from 85.04% to 78.3%. The power transmission efficiency the of WPT system with the dual combined planar coil in saltwater decreases to a lesser extent than the WPT system with the unipolar planar coil with increasing axial misalignment, which is similar to the experimental results obtained in air. By comparing the experimental results in air and saltwater, it can be found that the power transmission efficiency of the WPT system in saltwater is lower than that in air. The high-frequency ac current in magnetic coils generates an alternating magnetic field in saltwater, and the time-varying magnetic field produces a vortex electric field in saltwater. Saltwater is a medium with good conductivity; the electromotive force would be induced, generating eddy current, which results in eddy current loss in saltwater and a decline in power transmission efficiency [
26].
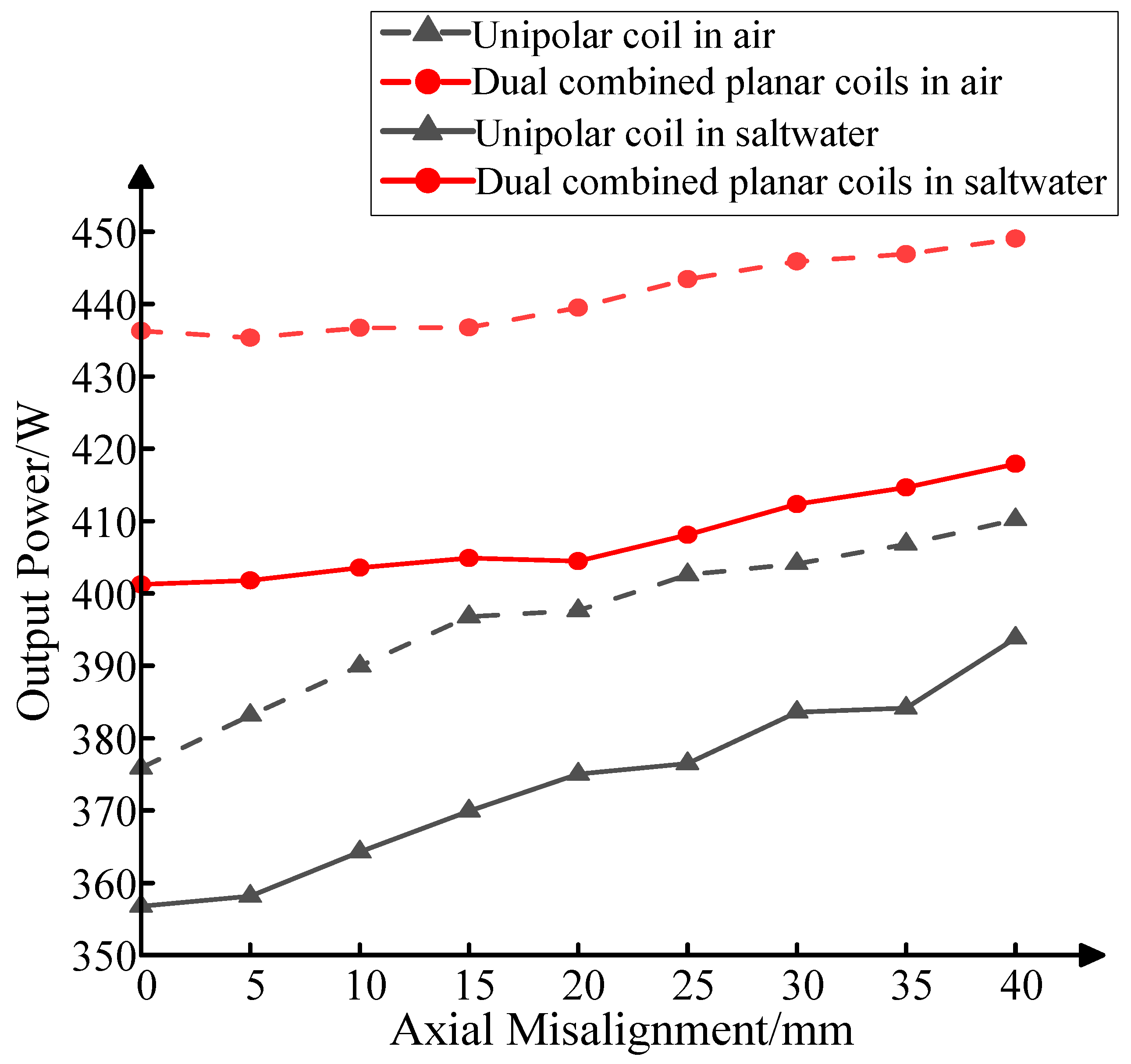
Figure 15 shows the output power of the WPT system versus axial misalignment. In the experiment, the input voltage is set to 80 V.
As is demonstrated in
Figure 15, the output power increases when the axial misalignment rises from 0 to 40 mm. The secondary current increases due to the reduction in mutual inductance when axial misalignment occurs, thus increasing the output power. The output power of the magnetic coupling structure with the dual combined planar coil is higher than that of the coupling structure with the unipolar coil in air. When the axial misalignment increases from 0 to 40 mm, the output power of the WPT system with the proposed dual combined planar coil rises from 436.28 W to 449.06 W, representing a variation in output power of 2.93%, while for the WPT system with solenoid-unipolar planar coil coupling structure, the output power increases from 375.89 W to 410.21 W, representing a variation in output power of 9.13%. This indicates that the stability of the WPT system’s output characteristics is enhanced by the proposed coupling structure when axial misalignment occurs.
The variation of the output power of the WPT system with a dual combined planar coil and a unipolar planar coil with axial misalignment in saltwater is also shown in
Figure 15. When the axial misalignment increases from 0 to 40 mm, the output power of the WPT system with the unipolar planar coil in saltwater increases from 356.76 W to 393.84 W, representing a variation in output power of 10.4%. In contrast, the power transmission efficiency of the WPT system with the proposed dual combined planar receiving coil rises from 401.23 W to 417.89 W, and the deviation rate of output power is 4.15%. The output power of the WPT system with the dual combined planar coil in saltwater exhibits less variation than the WPT system with the unipolar planar coil with increasing axial misalignment, which is similar to the experimental results obtained in air.
5. Discussion
In this paper, a magnetic coupling structure is proposed that consists of a solenoid transmitting coil and dual combined planar receiving coil for a wireless charging system for AUVs. The main function of this novel coupling structure is to enhance the misalignment tolerance of the WPT system, especially in the axial direction under the dynamic marine environment. The mutual inductance between the solenoid transmitting coil and the dual combined planar receiving coil remains nearly constant when misalignment changes within the limit.
However, the proposed solenoid-dual combined planar magnetic coupling structure does not generate a uniform magnetic field, as misalignment varies. In future work, the magnetic coupling structure will be greatly improved by adding magnetic cores or optimizing the parameters of the magnetic coils, so that the coupling structure generates a uniform magnetic field; thereby, both the stability of the power transmission efficiency and the output power of the system could be further enhanced. Furthermore, the introduction of the dual combined planar receiving coil increases the cost of winding compared with the unipolar receiving coil, which should be taken into account in the economic analysis of WPT system.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}