
Analysis of Sharp Eagle Oscillating Surge Wave Energy Converter Based on a Two-Dimensional Numerical Wave Flume Model




Abstract
:1. Introduction
2. Mathematical Background of the Numerical Model
2.1. Governing Equations
2.2. Momentum Source Terms for Wave Generation and Absoption
2.3. The Volume of Fluids Method
2.4. Equation of Motion of OSWECs
3. Validations of the Established 2D Numerical Wave Flume
3.1. Convergence Study
3.2. Geometry and Meshes of OSWEC
3.3. Verification of the Estblished Numerical Wave Flume
3.4. Verification of the Numerical PTO
4. Analysis of Sharp-Eagle OSWEC
4.1. Nonlinear Wave Slamming Forces on Sharp-Eagle OSWEC
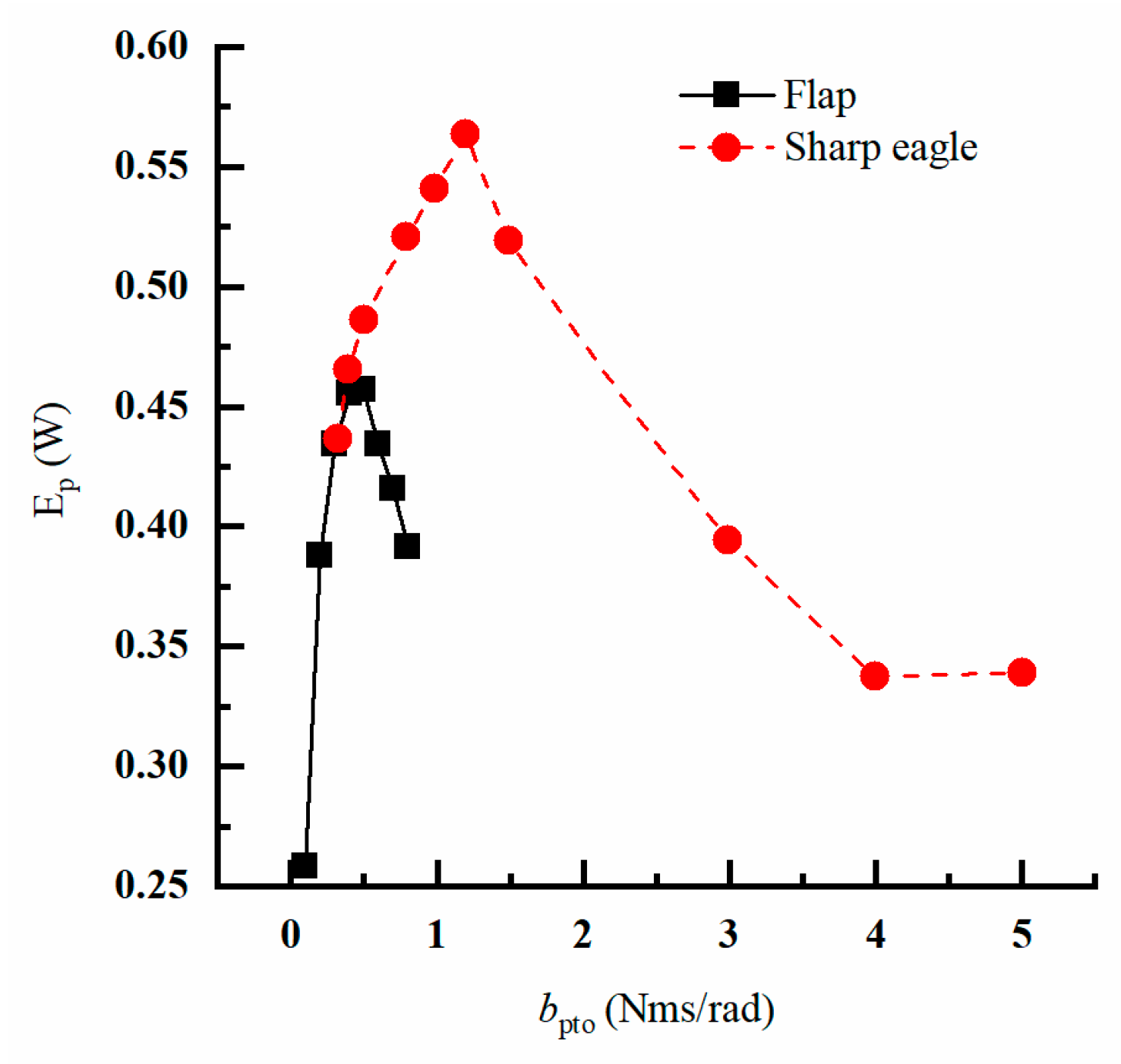
4.2. Power Output of the Sharp-Eagle OSWEC
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, M.; Wang, R.; Xiao, P.; Zhu, L.; Li, F.; Sun, L. Numerical analysis of a floating semi-submersible wind turbine integrated with a point absorber wave energy convertor. In Proceedings of the 30th International Ocean and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Shanghai, China, 11–16 October 2020. [Google Scholar]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully coupled analysis of an integrated floating wind-wave power generation platform in operational sea-states. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Jiao, P.; Matin Nazar, A.; Egbe, K.-J.L.; Barri, K.; Alavi, A.H. Magnetic capsulate triboelectric nanogenerators. Sci. Rep. 2022, 12, 89. [Google Scholar] [CrossRef]
- Curto, D.; Franzitta, V.; Guercio, A. Sea Wave Energy. A review of the current technologies and perspectives. Energies 2021, 14, 6604. [Google Scholar] [CrossRef]
- Khan, M.Z.A.; Khan, H.A.; Aziz, M. Harvesting energy from ocean: Technologies and perspectives. Energies 2022, 15, 3456. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhang, Z.; Sun, L.; Li, F. Effects of the end-stop mechanism on the nonlinear dynamics and power generation of a point absorber in regular waves. Ocean Eng. 2021, 242, 110123. [Google Scholar] [CrossRef]
- Henry, A.; Kimmoun, O.; Nicholson, J.; Dupont, G.; Wei, Y.; Dias, F. A two dimensional experimental investigation of slamming of an oscillating wave surge converter. In Proceedings of the 24th International Ocean and Polar Engineering Conference, Busan, Republic of Korea, 15–20 June 2014. [Google Scholar]
- Henry, A.; Schmitt, P.; Whittaker, T.; Rafiee, A.; Dias, F. The characteristics of wave impacts on an oscillating wave surge converter. In Proceedings of the 23rd International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–4 July 2013. [Google Scholar]
- Wei, Y.; Rafiee, A.; Henry, A.; Dias, F. Wave interaction with an oscillating wave surge converter, Part I: Viscous effects. Ocean Eng. 2015, 104, 185–203. [Google Scholar] [CrossRef]
- Wei, Y.; Abadie, T.; Henry, A.; Dias, F. Wave interaction with an oscillating wave surge converter. Part II: Slamming. Ocean Eng. 2015, 113, 319–334. [Google Scholar] [CrossRef]
- Brito, M.; Ferreira, R.M.L.; Teixeira, L.; Neves, M.G.; Canelas, R.B. Experimental investigation on the power capture of an oscillating wave surge converter in unidirectional waves. Renew. Energy 2019, 151, 975–992. [Google Scholar] [CrossRef]
- Brito, M.; Ferreira, R.M.L.; Teixeira, L.; Neves, M.G.; Gil, L. Experimental investigation of the flow field in the vicinity of an oscillating wave surge converter. J. Mar. Sci. Eng. 2020, 8, 976. [Google Scholar] [CrossRef]
- Ning, D.; Liu, C.; Zhang, C.; Göteman, M.; Zhao, H.; Teng, B. Hydrodynamic performance of an oscillating wave surge converter in regular and irregular waves: An experimental study. J. Mar. Sci. Technol. 2018, 25, 520–530. [Google Scholar]
- Sell, N.P.; Plummer, A.R.; Hillis, A.J. A Self-zeroing position controller for oscillating surge wave energy converters with strong asymmetry. J. Ocean Eng. Mar. Energy 2018, 4, 137–151. [Google Scholar] [CrossRef]
- Ruehl, K.; Forbush, D.D.; Yu, Y.-H.; Tom, N. Experimental and numerical comparisons of a dual-flap floating oscillating surge wave energy converter in regular waves. Ocean Eng. 2019, 196, 106575. [Google Scholar] [CrossRef]
- Choiniere, M.A.; Tom, N.M.; Thiagarajan, K.P. Load shedding characteristics of an oscillating surge wave energy converter with variable geometry. Ocean Eng. 2019, 186, 105982. [Google Scholar] [CrossRef]
- Tom, N.; Lawson, M.; Yu, Y.-H.; Wright, A. Spectral modeling of an oscillating surge wave energy converter with control surfaces. Appl. Ocean Res. 2016, 56, 143–156. [Google Scholar] [CrossRef]
- Tom, N.M.; Yu, Y.H.; Wright, A.D.; Lawson, M.J. Pseudo-spectral control of a novel oscillating surge wave energy converter in regular waves for power optimization including load reduction. Ocean Eng. 2017, 137, 352–366. [Google Scholar] [CrossRef]
- Chow, Y.-C.; Tzang, S.-Y.; Chen, J.-H.; Lin, C.-C. Inertial effects on the performance of a bottom-hinged oscillating wave surge converter. J. Offshore Mech. Arct. Eng. 2019, 141, 012902. [Google Scholar] [CrossRef]
- Sun, S.-Y.; Sun, S.-L.; Wu, G.-X. Fully nonlinear time domain analysis for hydrodynamic performance of an oscillating wave surge converter. China Ocean Eng. 2018, 32, 582–592. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G. Fully nonlinear analysis incorporating viscous effects for hydrodynamics of an oscillating wave surge converter with nonlinear power take-off system. Energy 2019, 179, 1067–1081. [Google Scholar] [CrossRef]
- Cheng, Y.; Ji, C.; Zhai, G.; Ma, Z. Fully nonlinear simulation of wave–current interaction with an oscillating wave surge converter. J. Mar. Sci. Technol. 2020, 25, 93–110. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, G.; Ji, C.; Zhai, G.; Oleg, G. Current effects on nonlinear wave slamming by an oscillating wave surge converter. Eng. Anal. Bound. Elem. 2018, 96, 150–168. [Google Scholar] [CrossRef]
- Cheng, Y.; Xi, C.; Dai, S.; Ji, C.; Cocard, M. Wave energy extraction for an array of dual-oscillating wave surge converter with different layouts. Appl. Energy 2021, 292, 116899. [Google Scholar] [CrossRef]
- Renzi, E.; Abdolali, A.; Bellotti, G.; Dias, F. Wave-power absorption from a finite array of oscillating wave surge converters. Renew. Energy 2013, 63, 55–68. [Google Scholar] [CrossRef]
- Zou, M.; Chen, M.S.; Zhu, L.; Li, L.; Zhao, W. A constant parameter time domain model for dynamic modelling of multi-body system with strong hydrodynamic interactions. Ocean Eng. 2023, 268, 113376. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R. Smoothed Particle Hydrodynamics (SPH): An overview and recent developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Hua, X. Numerical studies and proposal of design equations on cylindrical oscillating wave surge converters under regular waves using SPH. Energy Convers. Manag. 2020, 203, 112242. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Hua, X. Prediction and optimization of oscillating wave surge converter using machine learning techniques. Energy Convers. Manag. 2020, 210, 112677. [Google Scholar] [CrossRef]
- Zhang, D.H.; Shi, Y.X.; Huang, C.; Si, Y.L.; Huang, B.; Li, W. SPH method with applications of oscillating wave surge converter. Ocean Eng. 2018, 152, 273–285. [Google Scholar] [CrossRef]
- Zhang, C.; Wei, Y.; Dias, F.; Hu, X. An efficient fully Lagrangian solver for modeling wave interaction with oscillating wave surge converter. Ocean Eng. 2012, 236, 109540. [Google Scholar] [CrossRef]
- Schmitt, P.; Elsaesser, B. On the use of OpenFOAM to model oscillating wave surge converters. Ocean Eng. 2015, 108, 98–104. [Google Scholar] [CrossRef]
- Lin, C.-C.; Chow, Y.-C.; Tzang, S.-Y.; Chiou, C.-Y.; Huang, Y.-Y. Numerical study on the geometric and inertial parameters for oscillating wave surge converters. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Li, L.; Lin, Z.W.; You, Y.X. The numerical wave flume of the viscous fluid based on the momentum source method. J. Hydrodyn. Ser. A 2007, 22, 76–82. (In Chinese) [Google Scholar]
- Ye, Y.; Wang, K.L.; You, Y.G.; Sheng, S.W. Research of power take-off system for sharp eagle II wave energy converter. China Ocean Eng. 2019, 33, 618–627. [Google Scholar] [CrossRef]
- Zhu, L.; Duan, L.; Chen, M.; Yu, T.X.; Pedersen, P.T. Equivalent design pressure for ship plates subjected to moving slamming impact loads. Mar. Struct. 2020, 71, 102741. [Google Scholar] [CrossRef]
- Duan, L.; Zhu, L.; Chen, M.; Pedersen, P.T. Experimental study on the propagation characteristics of the slamming pressures. Ocean Eng. 2020, 217, 107868. [Google Scholar] [CrossRef]
- Li, F.; Tian, P.; Wang, L.; Chen, M. Investigation on lateral bearing capacity of monopile under combined vertical-lateral loads and scouring condition. Mar. Georesour. Geotechnol. 2021, 39, 505–514. [Google Scholar] [CrossRef]
- Chen, M.; Guo, H.; Wang, R.; Tao, R.; Cheng, N. Effects of gap resonance on the hydrodynamics and dynamics of a multi-module floating system with narrow gaps. J. Mar. Sci. Eng. 2021, 9, 1256. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Region | Mesh Size (m) | Time Step (s) |
|---|---|---|---|
| a | Horizontal direction | ∆x = λ/80 = 0.04 | ∆t = T/1000 = 0.0019 |
| Vertical direction | ∆y = H/16 = 0.00625 | ||
| b | Horizontal direction | ∆x = λ/100 = 0.032 | ∆t = T/1000 = 0.0019 |
| Vertical direction | ∆y = H/20 = 0.005 | ||
| c | Horizontal direction | ∆x = λ/80 = 0.04 | ∆t = T/800 = 0.002375 |
| Vertical direction | ∆y = H/16 = 0.00625 |
| Item | Unit | Value |
|---|---|---|
| Height of flap: h | m | 0.31 |
| Height of the hinge from seabed: hs | m | 0.1 |
| Width of flap: w | m | 0.0875 |
| Mass of flap: m | kg | 6.27 |
| Rotational inertia about the hinge: I | kg·m2 | 0.1147 |
| Height of the center of gravity: yc | m | 0.1324 |
| x Coordinate of Center | y Coordinate of Center | Radius | |
|---|---|---|---|
| Arc R1 | −0.3551 | −0.0626 | 0.3575 |
| Arc R2 | 0.1717 | −0.3795 | 0.6895 |
| Arc R3 | 0.2153 | 0.0195 | 0.2132 |
| Arc R4 | 0.2787 | 0.2630 | 0.0383 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Yang, Z.; Chen, M.; Li, F. Analysis of Sharp Eagle Oscillating Surge Wave Energy Converter Based on a Two-Dimensional Numerical Wave Flume Model. J. Mar. Sci. Eng. 2023, 11, 1607. https://doi.org/10.3390/jmse11081607
Sun L, Yang Z, Chen M, Li F. Analysis of Sharp Eagle Oscillating Surge Wave Energy Converter Based on a Two-Dimensional Numerical Wave Flume Model. Journal of Marine Science and Engineering. 2023; 11(8):1607. https://doi.org/10.3390/jmse11081607
Chicago/Turabian StyleSun, Liang, Zewang Yang, Mingsheng Chen, and Fen Li. 2023. "Analysis of Sharp Eagle Oscillating Surge Wave Energy Converter Based on a Two-Dimensional Numerical Wave Flume Model" Journal of Marine Science and Engineering 11, no. 8: 1607. https://doi.org/10.3390/jmse11081607
APA StyleSun, L., Yang, Z., Chen, M., & Li, F. (2023). Analysis of Sharp Eagle Oscillating Surge Wave Energy Converter Based on a Two-Dimensional Numerical Wave Flume Model. Journal of Marine Science and Engineering, 11(8), 1607. https://doi.org/10.3390/jmse11081607