

Determination of Formulae for the Hydrodynamic Performance of a Fixed Box-Type Free Surface Breakwater in the Intermediate Water


Abstract
:1. Introduction
2. Theoretical Introduction
2.1. Governing Equations
2.2. RNG Turbulence Model
2.3. Principle of Mass Source Wavemaker
2.4. Principle of Numerical Solution
3. Model Setup and Validation
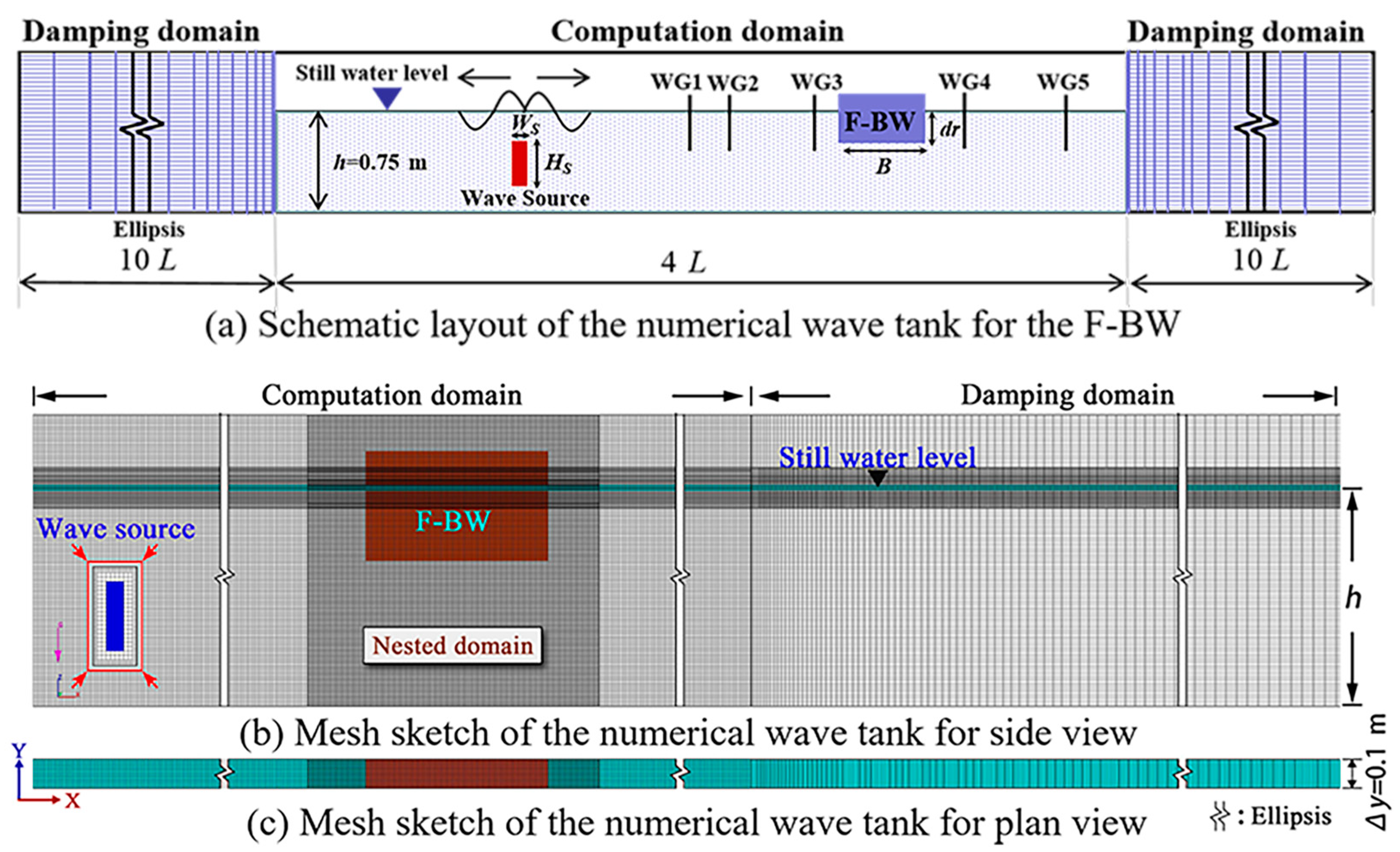
3.1. Numerical Wave Tank Setup
3.2. Numerical Model Validation
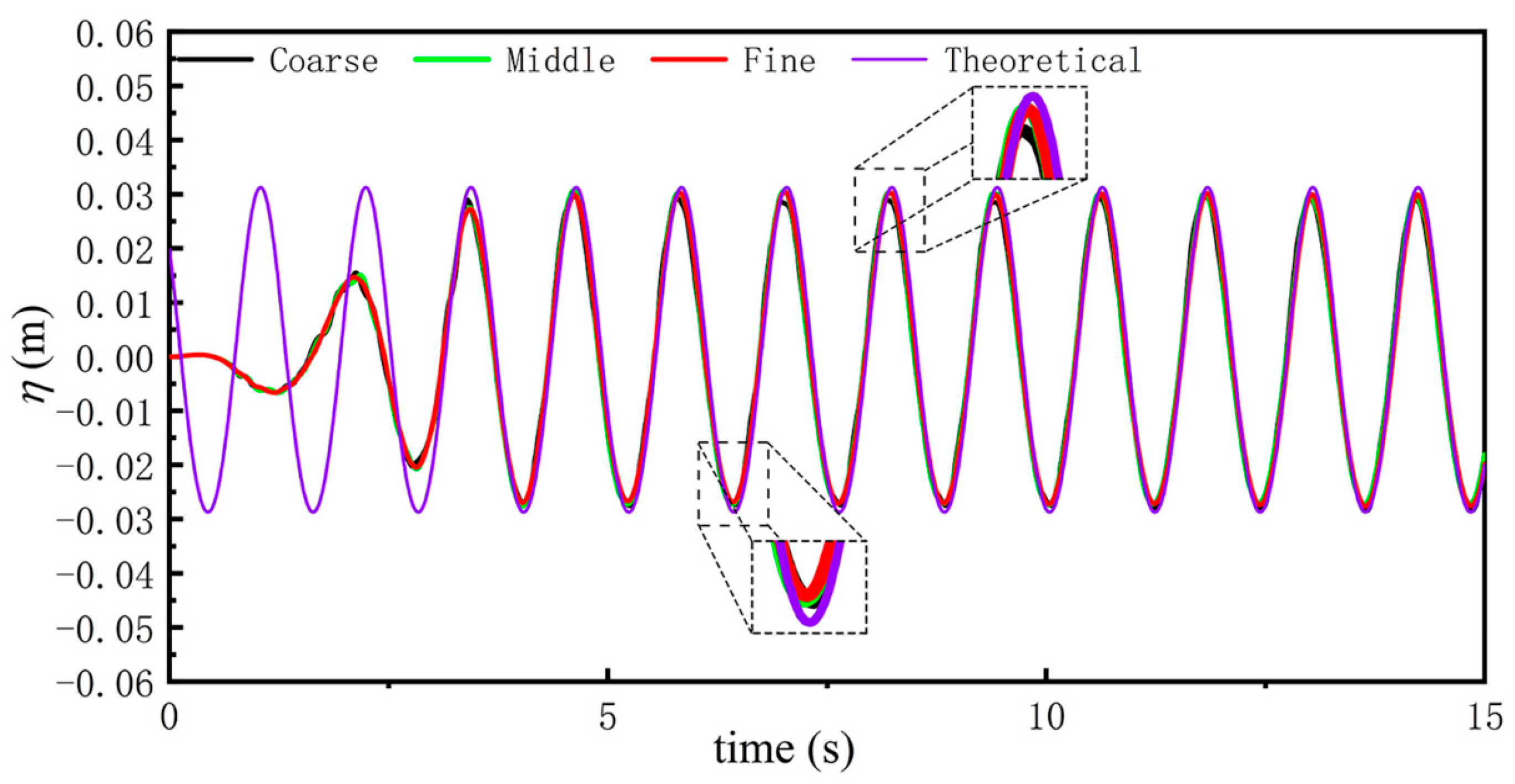
3.2.1. Grid Independent Verification
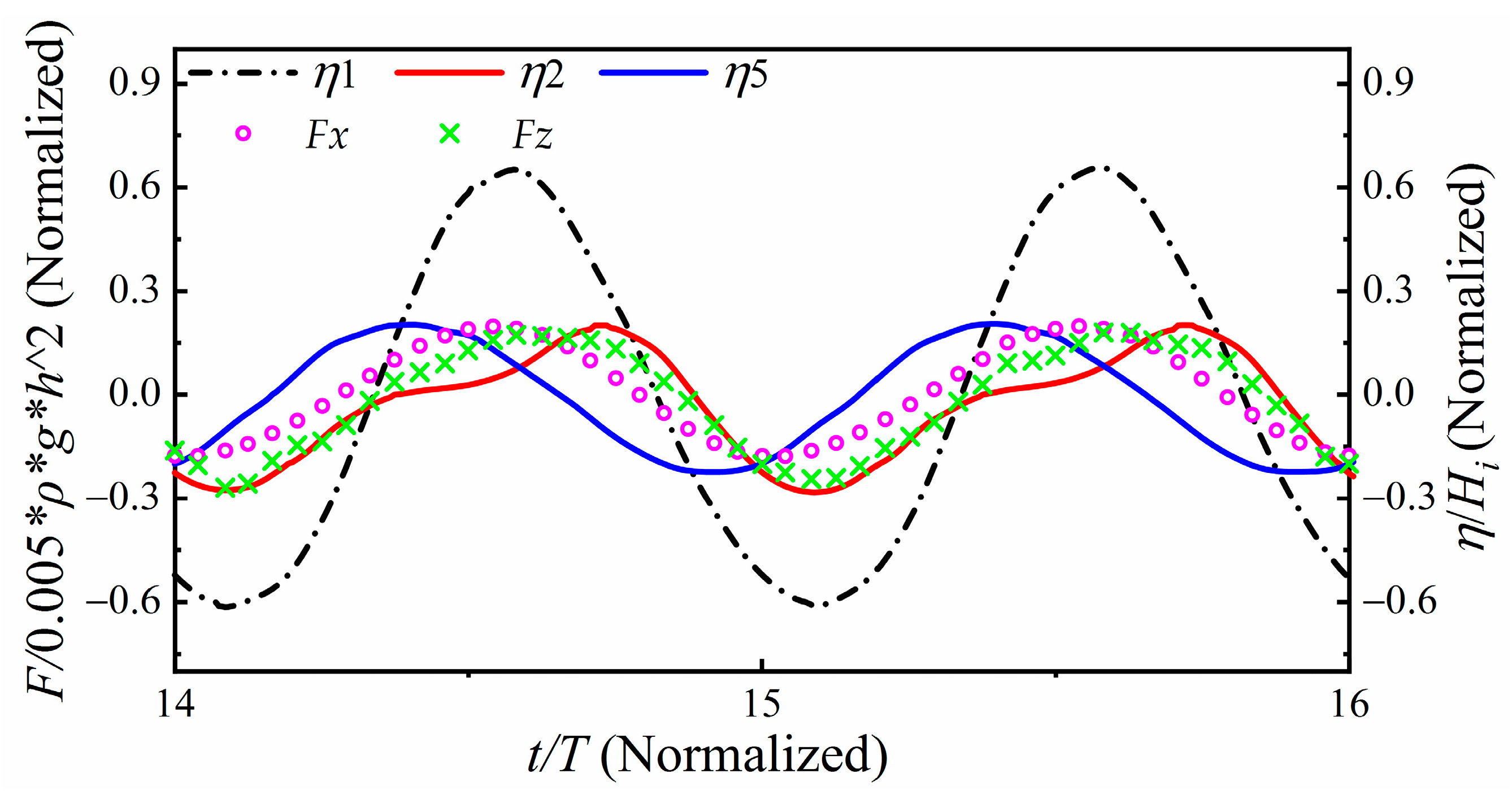
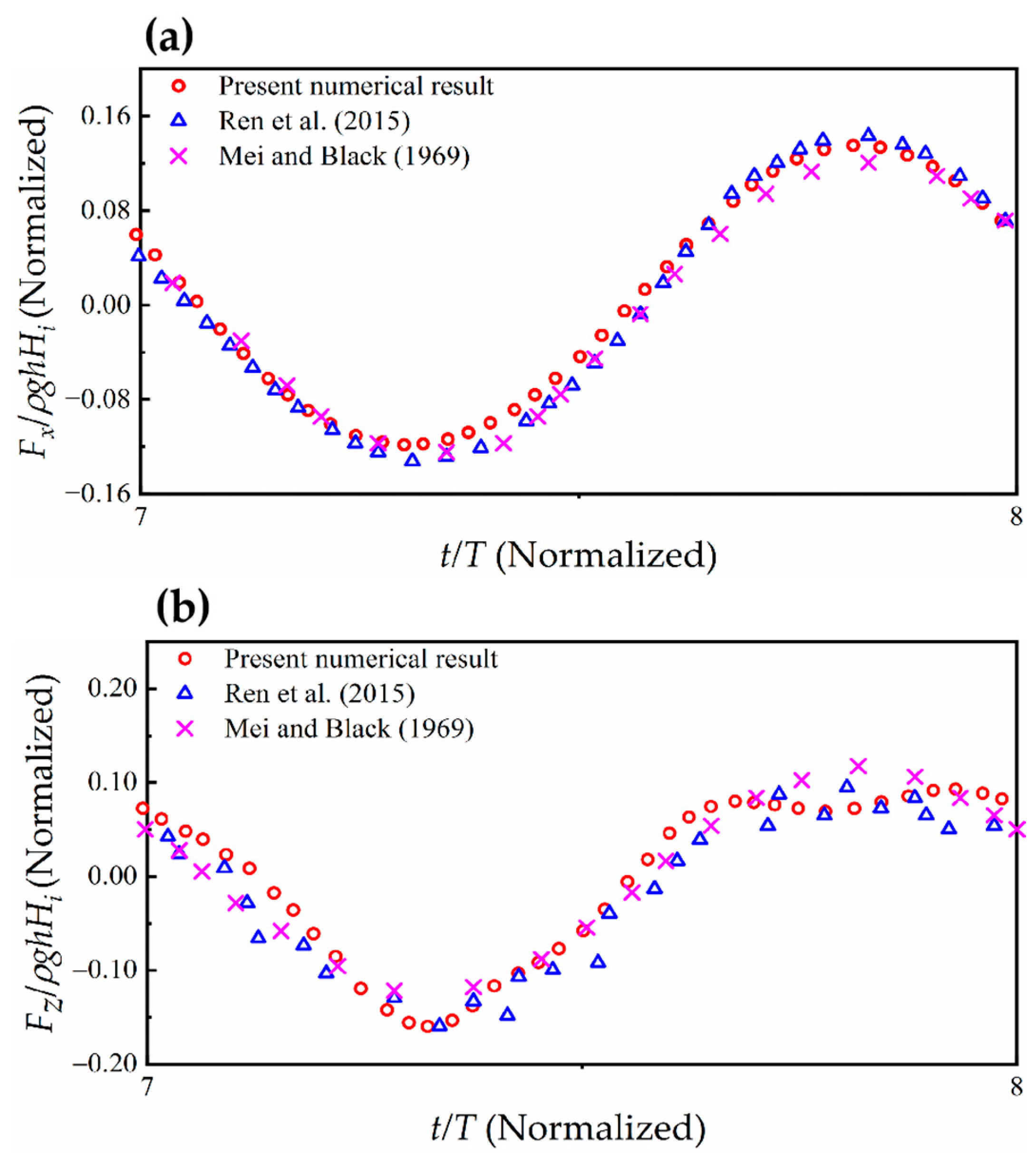
3.2.2. Validation of Wave Forces
4. Results and Discussion
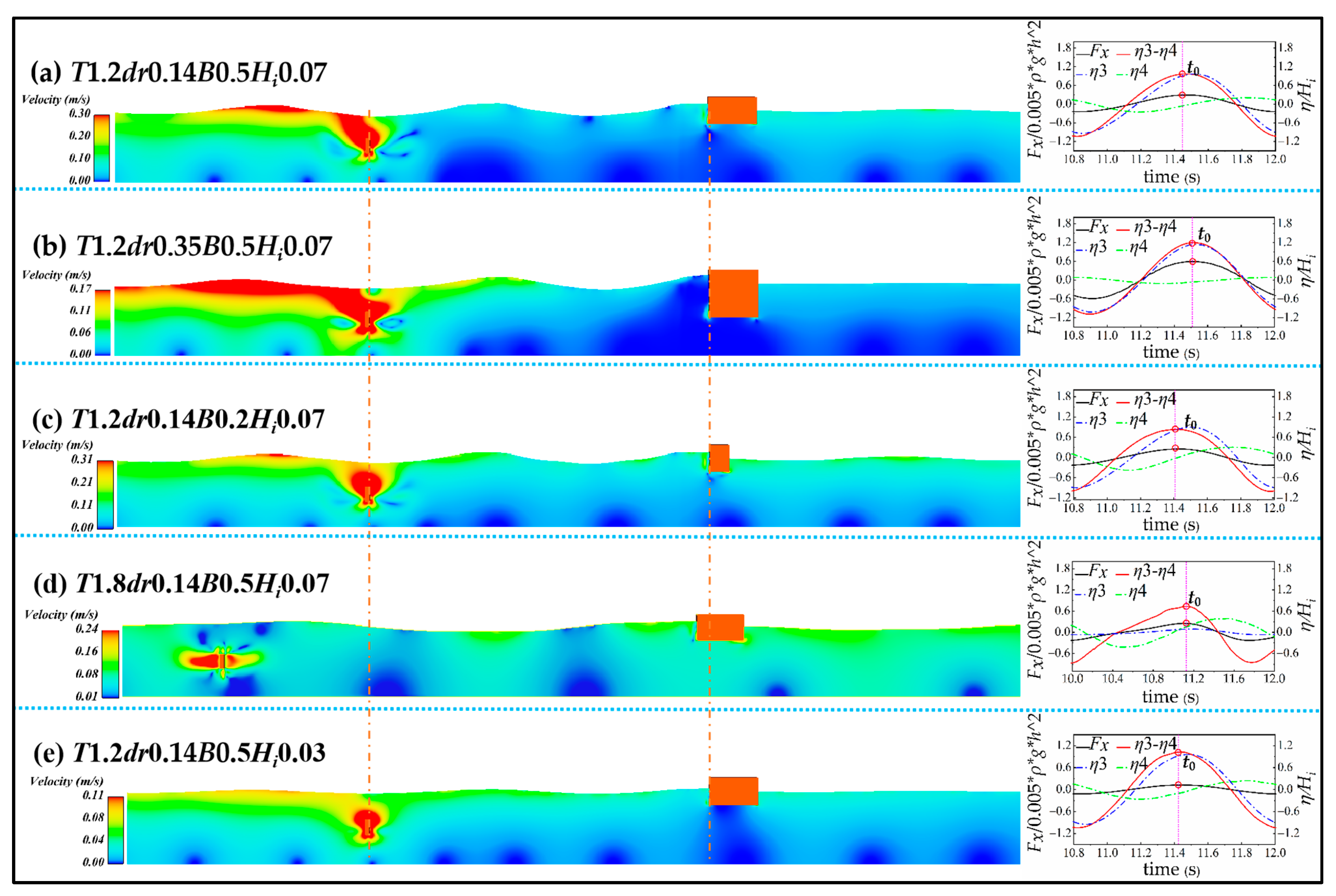
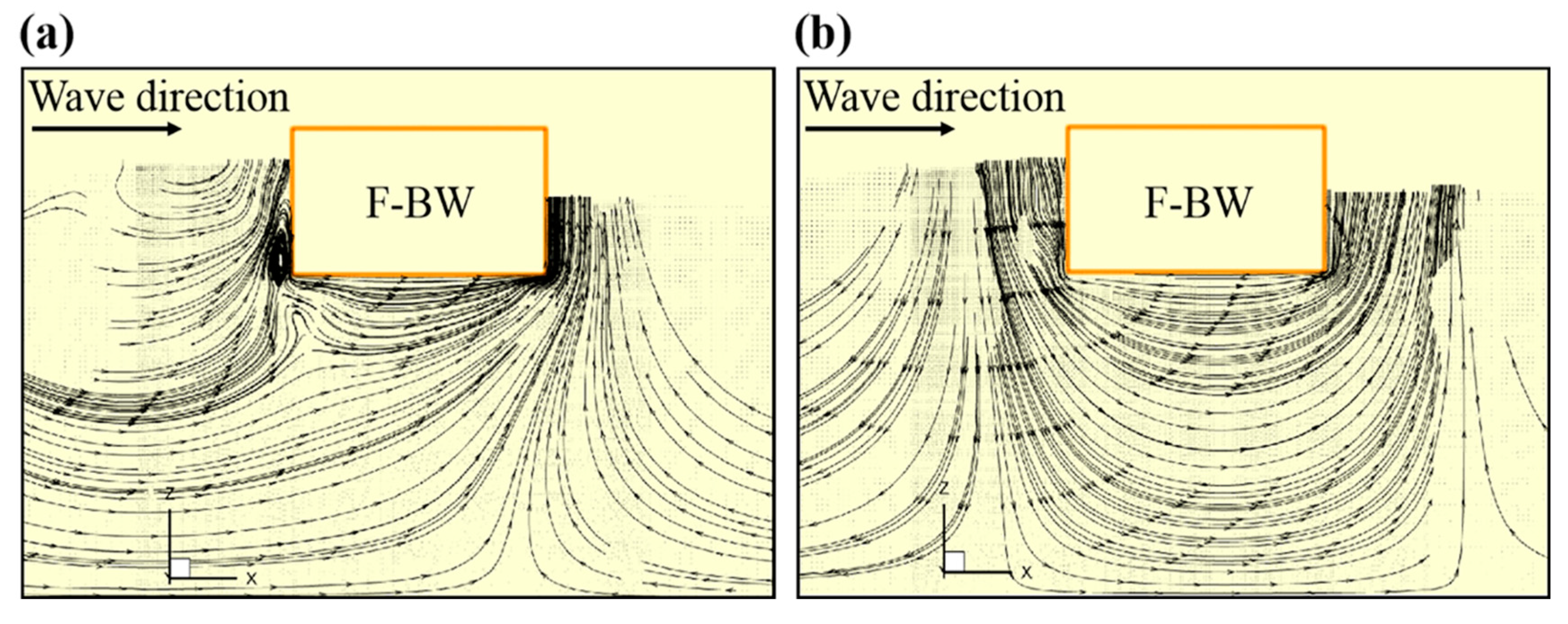
4.1. Influence Analysis of Four Factors on the Hydrodynamic Performance of F-BW
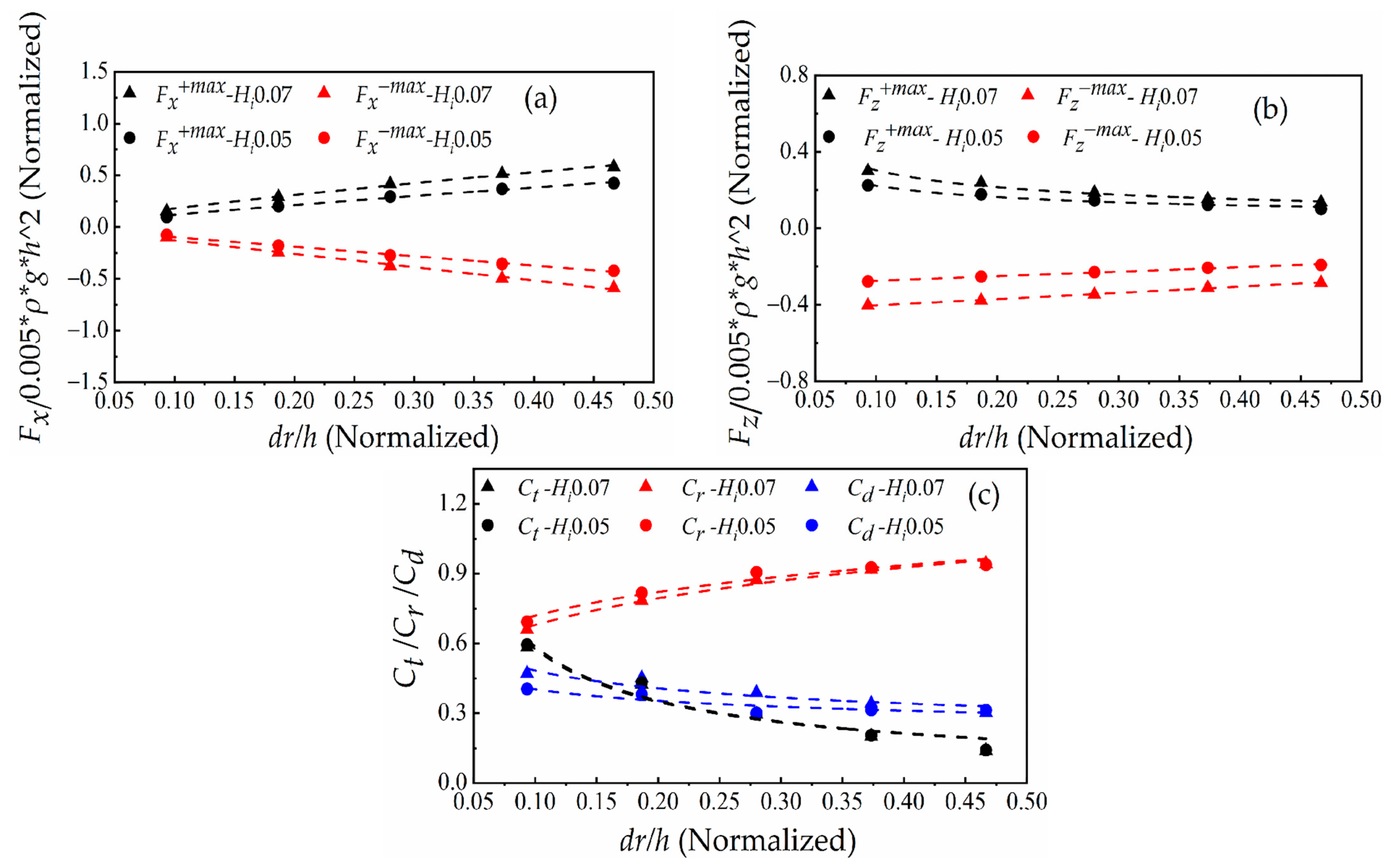
4.1.1. Effect of Draft
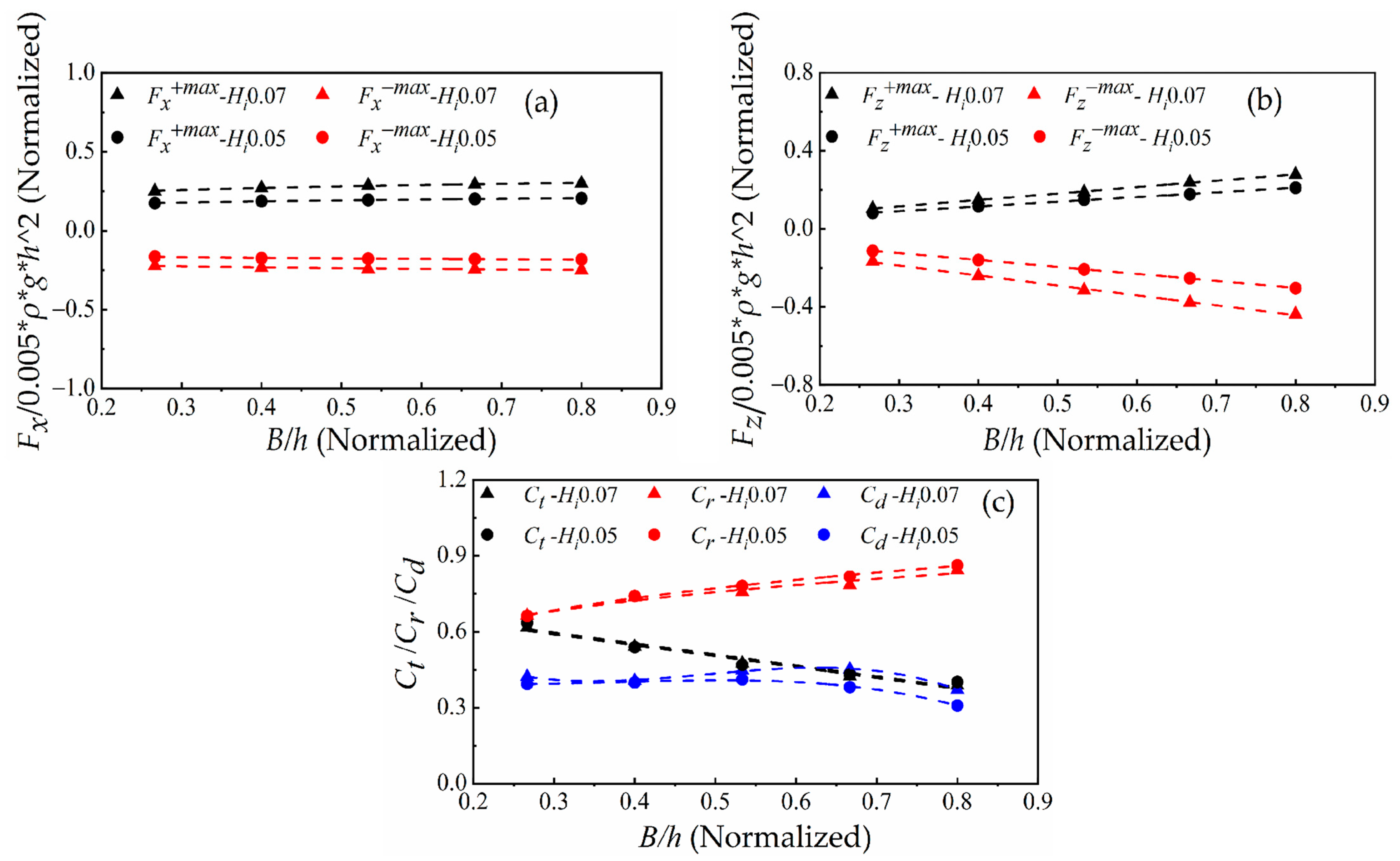
4.1.2. Effect of Breakwater Width
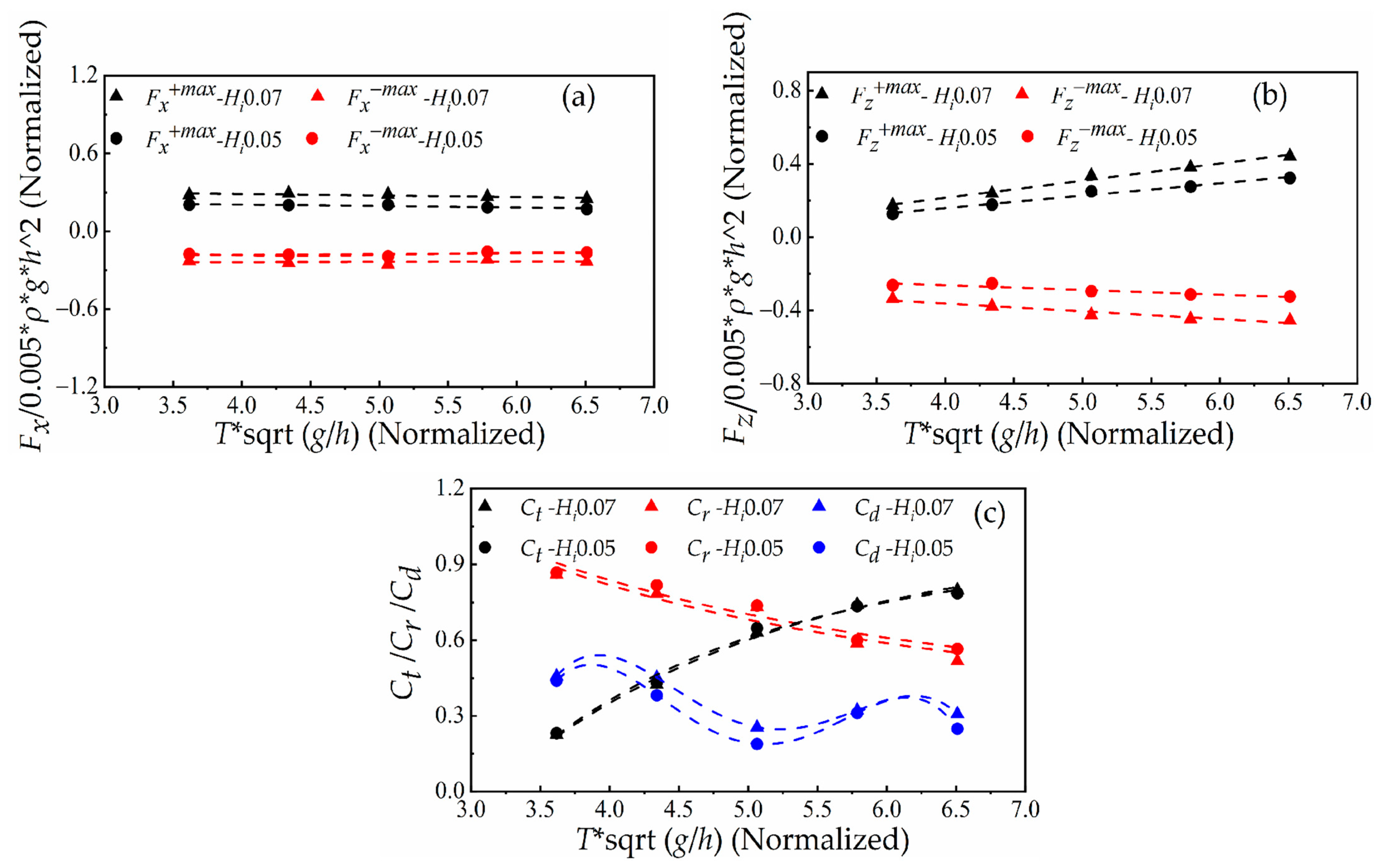
4.1.3. Effect of Wave Period
4.1.4. Effect of Wave Height
4.2. Prediction Equations of F-BW Hydrodynamic Performance Parameters
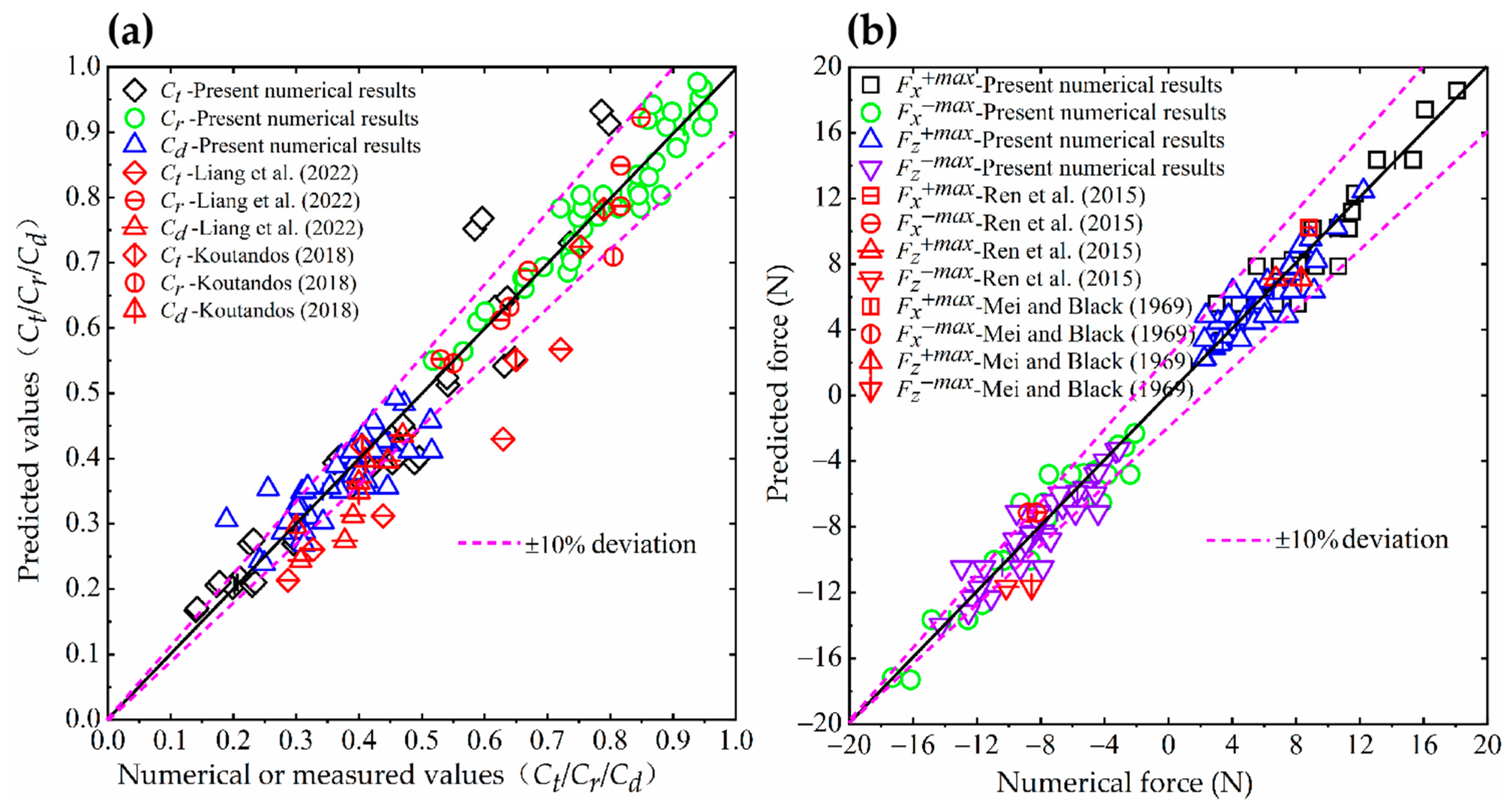
4.3. Deviation Analysis of the Prediction Equations
5. Conclusions
- (1)
- The performance of two-dimensional viscous numerical wave tanks (NWTs) with a mass source wave maker and small length scale (1:40) are analyzed. By comparison, the wave model employed in this paper is competent for the numerical simulation of the F-BW.
- (2)
- The results show that the increase in the four influence factors, except the wave period, benefits the decrease in the wave transmission. The increase in draft and breakwater width is beneficial to the increase in the wave reflection, and the wave period and wave height are opposite. The increase in draft benefits the decrease in wave energy dissipation, and the wave height is opposite.
- (3)
- The increase in the draft and wave height benefits the increase in the horizontal positive and negative maximum wave forces. In addition to the draft, the increase in the other three influence factors benefits the increase in the vertical positive and negative maximum wave forces.
- (4)
- Applying multiple linear regression presents the prediction equations of RTD coefficients and the extreme wave force. The prediction equations are verified by comparing them with literature observation datasets.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- He, F.; Huang, Z.H.; Law, A.W.K. Hydrodynamic performance of a rectangular floating breakwater with and without pneumatic chambers: An experimental study. Ocean Eng. 2012, 51, 16–27. [Google Scholar] [CrossRef]
- Zhan, J.; Chen, X.; Gong, Y.; Hu, W. Numerical investigation of the interaction between an inverse T-type fixed/floating breakwater and regular/irregular waves. Ocean Eng. 2017, 137, 110–119. [Google Scholar] [CrossRef]
- Fu, D.; Zhao, X.Z.; Wang, S.; Yan, D.M. Numerical study on the wave dissipating performance of a submerged heaving plate breakwater. Ocean Eng. 2021, 219, 108310. [Google Scholar] [CrossRef]
- Hales, L.Z. Floating Breakwaters: State-of-the-Art Literature Review; Coastal Engineering Research Center: London, UK, 1981. [Google Scholar]
- Teh, H.M. Hydraulic performance of free surface breakwaters: A review. Sains Malays. 2013, 42, 1301–1310. [Google Scholar]
- Liang, J.M.; Chen, Y.K.; Liu, Y.; Li, A.J. Hydrodynamic performance of a new box-type breakwater with superstructure: Experimental study and SPH simulation. Ocean Eng. 2022, 266, 112819. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z. Experimental investigation of breakwater-type WEC composed of both stationary and floating pontoons. Energy 2018, 155, 226–233. [Google Scholar] [CrossRef]
- Macagno, A. Wave action in a flume containing a submerged culvert. In La Houille Blanche; Taylor and Francis: London, UK, 1954. [Google Scholar]
- Wiegel, R.L. Transmission of waves past a rigid vertical thin barrier. J. Waterw. Harb. Div. 1960, 86, 1–12. [Google Scholar] [CrossRef]
- Ursell, F. The effect of a fixed vertical barrier on surface waves in deep water. Math. Proc. Camb. Philos. Soc. 1947, 43, 374–382. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.C.; Guedes Soares, C. Wave interaction with a rectangular long floating structure over flat bottom. In Progress in Maritime Technology and Engineering; CRC Press: Boca Raton, FL, USA, 2018; pp. 647–654. [Google Scholar]
- Kolahdoozan, M.; Bali, M.; Rezaee, M.; Moeini, M.H. Wave-transmission prediction of π-type floating breakwaters in intermediate waters. J. Coast. Res. 2017, 33, 1460–1466. [Google Scholar] [CrossRef]
- Koutandos, E. Regular-irregular wave pressures on a semi-immersed breakwater. J. Mar. Environ. Eng. 2018, 10, 109–145. [Google Scholar]
- Liang, J.M.; Liu, Y.; Chen, Y.K.; Li, A.J. Experimental study on hydrodynamic characteristics of the box-type floating breakwater with different mooring configurations. Ocean Eng. 2022, 254, 111296. [Google Scholar] [CrossRef]
- Fugazza, M.; Natale, L. Energy losses and floating breakwater response. J. Waterw. Port Coast. Ocean Eng. 1988, 114, 191–205. [Google Scholar] [CrossRef]
- Koftis, T.; Prinos, P. 2 DV Hydrodynamics of a Catamaran-Shaped Floating Structure. Iasme Trans. 2005, 2, 1180–1189. [Google Scholar]
- Elsharnouby, B.; Soliman, A.; Elnaggar, M.; Elshahat, M. Study of environment friendly porous suspended breakwater for the Egyptian Northwestern Coast. Ocean Eng. 2012, 48, 47–58. [Google Scholar] [CrossRef]
- Chen, Y.; Niu, G.; Ma, Y. Study on hydrodynamics of a new comb-type floating breakwater fixed on the water surface. In Proceedings of the E3S Web of Conferences, Wuhan, China, 14–16 December 2018; EDP Sciences: Les Ulis, France, 2018; Volume 79, p. 02003. [Google Scholar]
- Fan, N.; Nian, T.K.; Jiao, H.B.; Guo, X.S.; Zheng, D.F. Evaluation of the mass transfer flux at interfaces between submarine sliding soils and ambient water. Ocean Eng. 2020, 216, 108069. [Google Scholar] [CrossRef]
- Fan, N.; Jiang, J.X.; Dong, Y.K.; Guo, L.; Song, L.F. Approach for evaluating instantaneous impact forces during submarine slide-pipeline interaction considering the inertial action. Ocean Eng. 2022, 245, 110466. [Google Scholar] [CrossRef]
- Ghafari, A.; Tavakoli, M.R.; Nili-Ahmadabadi, M.; Teimouri, K.; Kim, K.C. Investigation of interaction between solitary wave and two submerged rectangular obstacles. Ocean Eng. 2021, 237, 109659. [Google Scholar] [CrossRef]
- Zheng, X.; Lv, X.P.; Ma, Q.W.; Duan, W.Y.; Khayyer, A.; Shao, S.D. An improved solid boundary treatment for wave–float interactions using ISPH method. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 329–347. [Google Scholar] [CrossRef]
- Ren, B.; He, M.; Dong, P.; Wen, H.J. Nonlinear simulations of wave-induced motions of a freely floating body using WCSPH method. Appl. Ocean Res. 2015, 50, 1–12. [Google Scholar] [CrossRef]
- Kurdistani, S.M.; Tomasicchio, G.R.; D’Alessandro, F.; Francone, A. Formula for Wave Transmission at Submerged Homogeneous Porous Breakwaters. Ocean Eng. 2022, 266, 113053. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Flow-3D User’s Manuals; Flow science Inc.: Santa Fe, NM, USA, 2012. [Google Scholar]
- Yakhot, V.; Orszag, S.A. Renormalization group analysis of turbulence. I. Basic theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef]
- Faraci, C.; Musumeci, R.E.; Marino, M.; Ruggeri, A.; Carlo, L.; Jensen, B.; Foti, E.; Barbaro, G.; Elsaßer, B. Wave-and current-dominated combined orthogonal flows over fixed rough beds. Cont. Shelf Res. 2021, 220, 104403. [Google Scholar] [CrossRef]
- Lin, P.Z.; Liu, P.L.-F. Internal wave-maker for Navier-Stokes equations models. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 207–215. [Google Scholar] [CrossRef]
- Lara, J.L.; Garcia, N.; Losada, I.J. RANS modelling applied to random wave interaction with submerged permeable structures. Coast. Eng. 2006, 53, 395–417. [Google Scholar] [CrossRef]
- Ha, T.; Lin, P.Z.; Cho, Y.S. Generation of 3D regular and irregular waves using Navier-Stokes equations model with an internal wave maker. Coast. Eng. 2013, 76, 55–67. [Google Scholar] [CrossRef]
- Chen, Y.L.; Hsiao, S.C. Generation of 3D water waves using mass source wavemaker applied to Navier-Stokes model. Coast. Eng. 2016, 109, 76–95. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Schmitt, P.; Ringwood, J.V. On the assessment of numericalwave makers in CFD simulations. J. Mar. Sci. Eng. 2019, 7, 47. [Google Scholar] [CrossRef]
- Wang, D.X.; Dong, S. Generating shallow-and intermediate-water waves using a line-shaped mass source wavemaker. Ocean Eng. 2021, 220, 108493. [Google Scholar] [CrossRef]
- Wang, D.X.; Sun, D.; Dong, S. Numerical investigation into effect of the rubble mound inside perforated caisson breakwaters under random sea states. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2022, 236, 48–61. [Google Scholar] [CrossRef]
- Goda, Y.; Suzuki, Y. Estimation of incident and reflected waves in random wave experiments. In Proceedings of the 15th International Conference on Coastal Engineering, Honolulu, HI, USA, 11–17 July 1976; pp. 828–845. [Google Scholar]
- Orlanski, I. A simple boundary condition for unbounded hyperbolic flows. J. Comput. Phys. 1976, 21, 251–269. [Google Scholar] [CrossRef]
- Veritas, D.N. Environmental Conditions and Environmental Loads: Recommended Practice; DNV-RP-C205; Det Norske Veritas (DNV): Oslo, Norway, 2010. [Google Scholar]
- Mei, C.C.; Black, J.L. Scattering of surface waves by rectangular obstacles in waters of finite depth. J. Fluid Mech. 1969, 38, 499–511. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable 1 | Variable 2 | Variable 3 | Variable 4 | |
|---|---|---|---|---|
| dr | B | T | Hi | |
| [m] | [m] | [s] | [m] | |
| Case 1 | 0.07 | 0.05 | 1.2 | 0.05 |
| Case 2 | 0.07 | |||
| Case 3 | 0.14 | 0.05 | ||
| Case 4 | 0.07 | |||
| Case 5 | 0.21 | 0.05 | ||
| Case 6 | 0.07 | |||
| Case 7 | 0.28 | 0.05 | ||
| Case 8 | 0.07 | |||
| Case 9 | 0.35 | 0.05 | ||
| Case 10 | 0.07 | |||
| Case 11 | 0.14 | 0.2 | 1.2 | 0.05 |
| Case 12 | 0.07 | |||
| Case 13 | 0.3 | 0.05 | ||
| Case 14 | 0.07 | |||
| Case 15 | 0.4 | 0.05 | ||
| Case 16 | 0.07 | |||
| Case 17 | 0.6 | 0.05 | ||
| Case 18 | 0.07 | |||
| Case 19 | 0.14 | 0.5 | 1 | 0.05 |
| Case 20 | 0.07 | |||
| Case 21 | 1.4 | 0.05 | ||
| Case 22 | 0.07 | |||
| Case 23 | 1.6 | 0.05 | ||
| Case 24 | 0.07 | |||
| Case 25 | 1.8 | 0.05 | ||
| Case 26 | 0.07 | |||
| Case 27 | 0.14 | 0.5 | 1.2 | 0.03 |
| Case 28 | 0.28 | |||
| Case 29 | 0.14 | 0.09 | ||
| Case 30 | 0.28 |
| Mesh Type | Computation Domain Grid Size (cm) | Nested Domain Grid Size (cm) | Cell Number | Elapsed Time (×104 s) | Wave Height (cm) | Error % |
|---|---|---|---|---|---|---|
| Coarse | 2 | 1 | 701460 | 0.6496 | 5.642 | 5.96 |
| Middle | 1 | 0.5 | 3411180 | 7.6832 | 5.768 | 3.87 |
| Fine | 0.5 | 0.25 | 13350960 | 48.1437 | 5.769 | 3.85 |
| Theoretical | - | - | - | - | 6.000 | - |
| Equation Number | Equations | R2 |
|---|---|---|
| (12a) | 0.948 | |
| (12b) | 0.958 | |
| (12c) | 0.695 | |
| (12d) | 0.992 | |
| (12e) | 0.988 | |
| (12f) | 0.988 | |
| (12g) | 0.989 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, G.; Chen, Y.; Lv, J.; Zhang, J.; Fan, N. Determination of Formulae for the Hydrodynamic Performance of a Fixed Box-Type Free Surface Breakwater in the Intermediate Water. J. Mar. Sci. Eng. 2023, 11, 1812. https://doi.org/10.3390/jmse11091812
Niu G, Chen Y, Lv J, Zhang J, Fan N. Determination of Formulae for the Hydrodynamic Performance of a Fixed Box-Type Free Surface Breakwater in the Intermediate Water. Journal of Marine Science and Engineering. 2023; 11(9):1812. https://doi.org/10.3390/jmse11091812
Chicago/Turabian StyleNiu, Guoxu, Yaoyong Chen, Jiao Lv, Jing Zhang, and Ning Fan. 2023. "Determination of Formulae for the Hydrodynamic Performance of a Fixed Box-Type Free Surface Breakwater in the Intermediate Water" Journal of Marine Science and Engineering 11, no. 9: 1812. https://doi.org/10.3390/jmse11091812
APA StyleNiu, G., Chen, Y., Lv, J., Zhang, J., & Fan, N. (2023). Determination of Formulae for the Hydrodynamic Performance of a Fixed Box-Type Free Surface Breakwater in the Intermediate Water. Journal of Marine Science and Engineering, 11(9), 1812. https://doi.org/10.3390/jmse11091812