
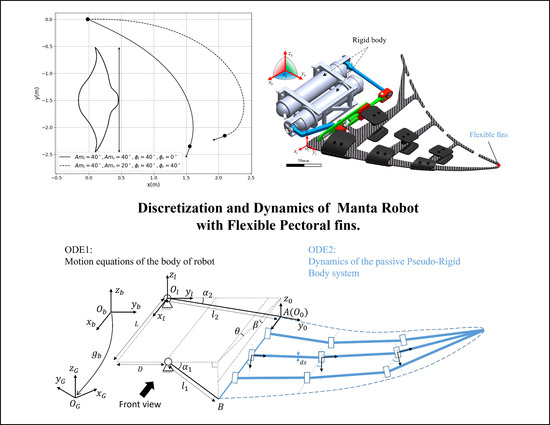
A Rigid-Flexible Coupling Dynamic Model for Robotic Manta with Flexible Pectoral Fins

 , , ,
, , , 
Abstract
:
1. Introduction
1.1. Manta Robot
1.2. Commonly Used Theories and Methods for Modeling Manta Robot
1.3. Structure of the Paper
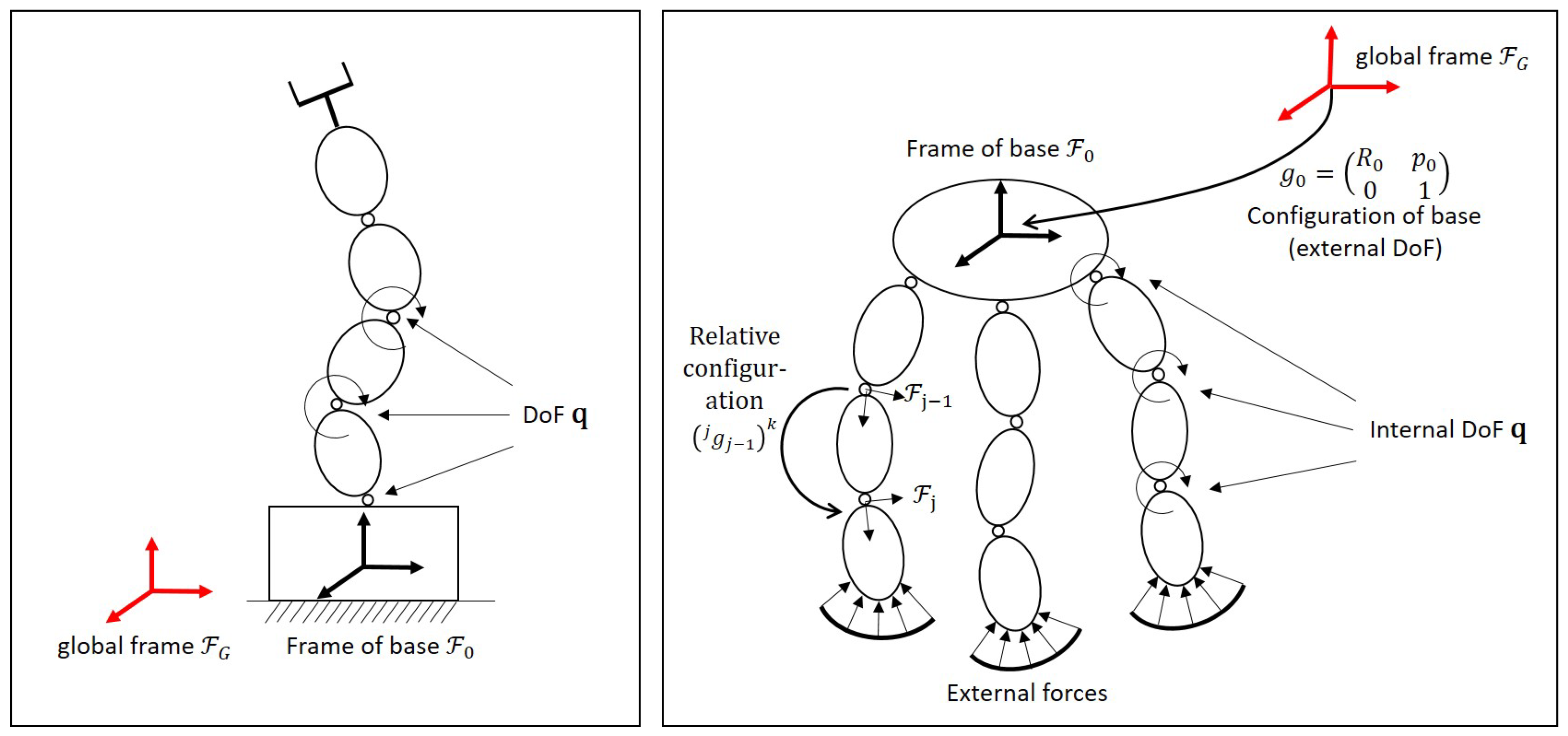
2. Basic Definitions and Notations of Rigid Multibody Mechanics
3. Dynamic Modeling
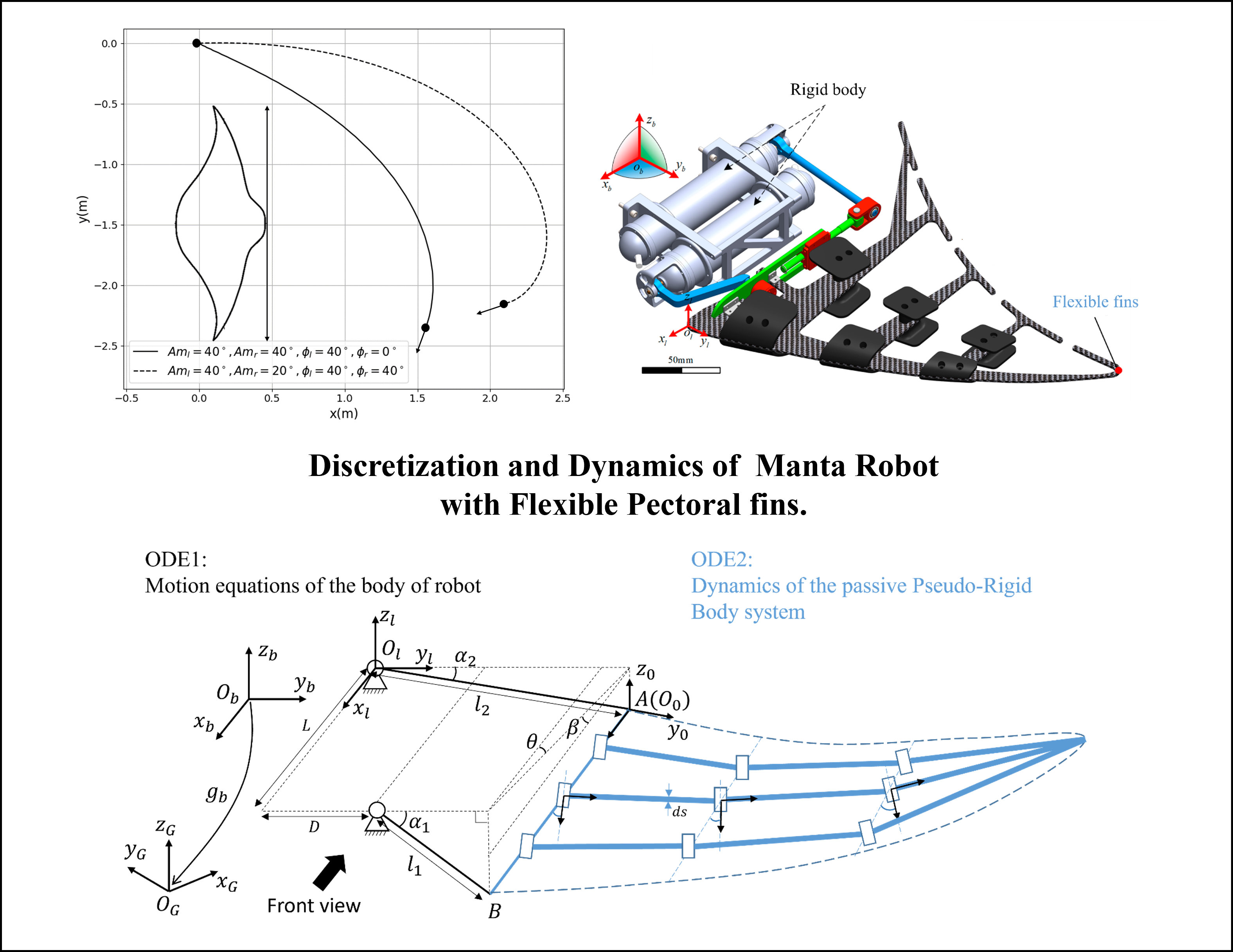
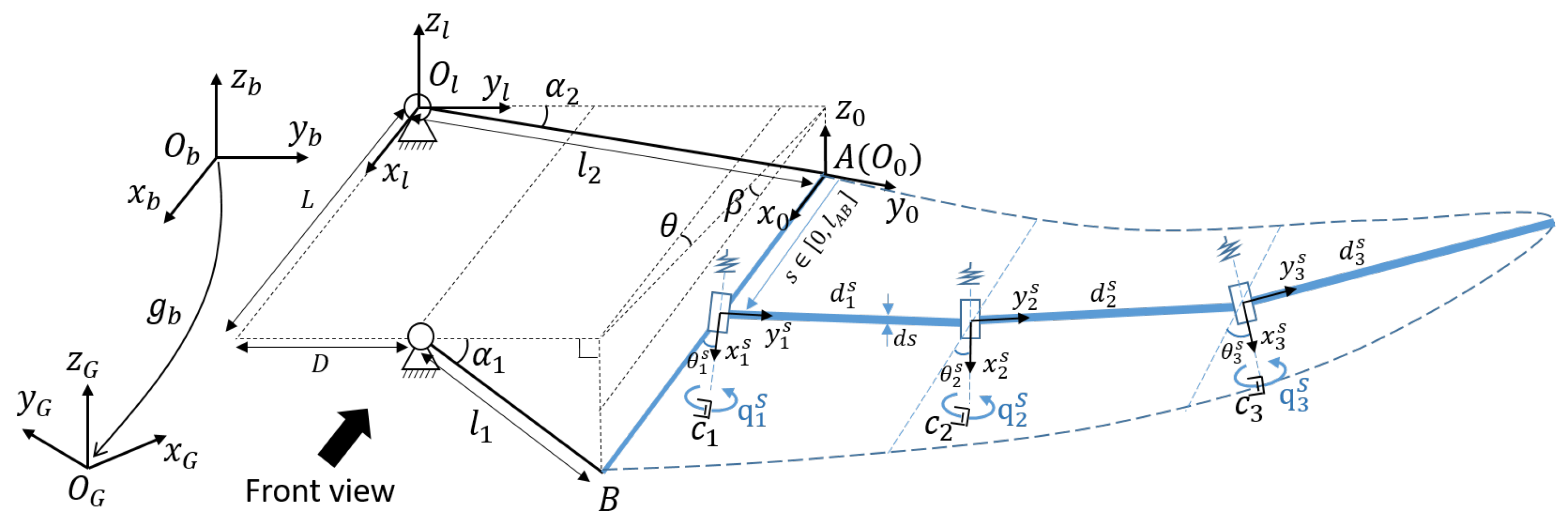
3.1. Kinematics of the Active Actuation Mechanism of Fins
3.2. Morison Hydrodynamic Forces
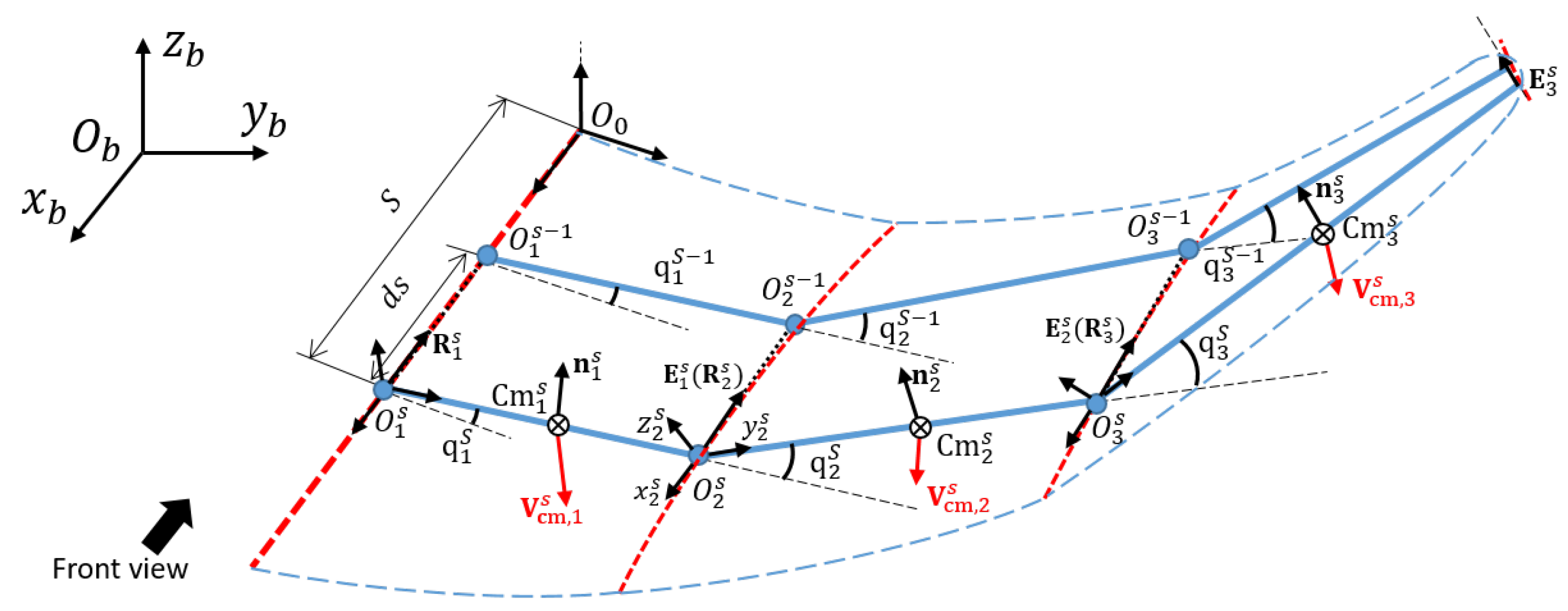
3.3. Dynamics of Passive PRB System
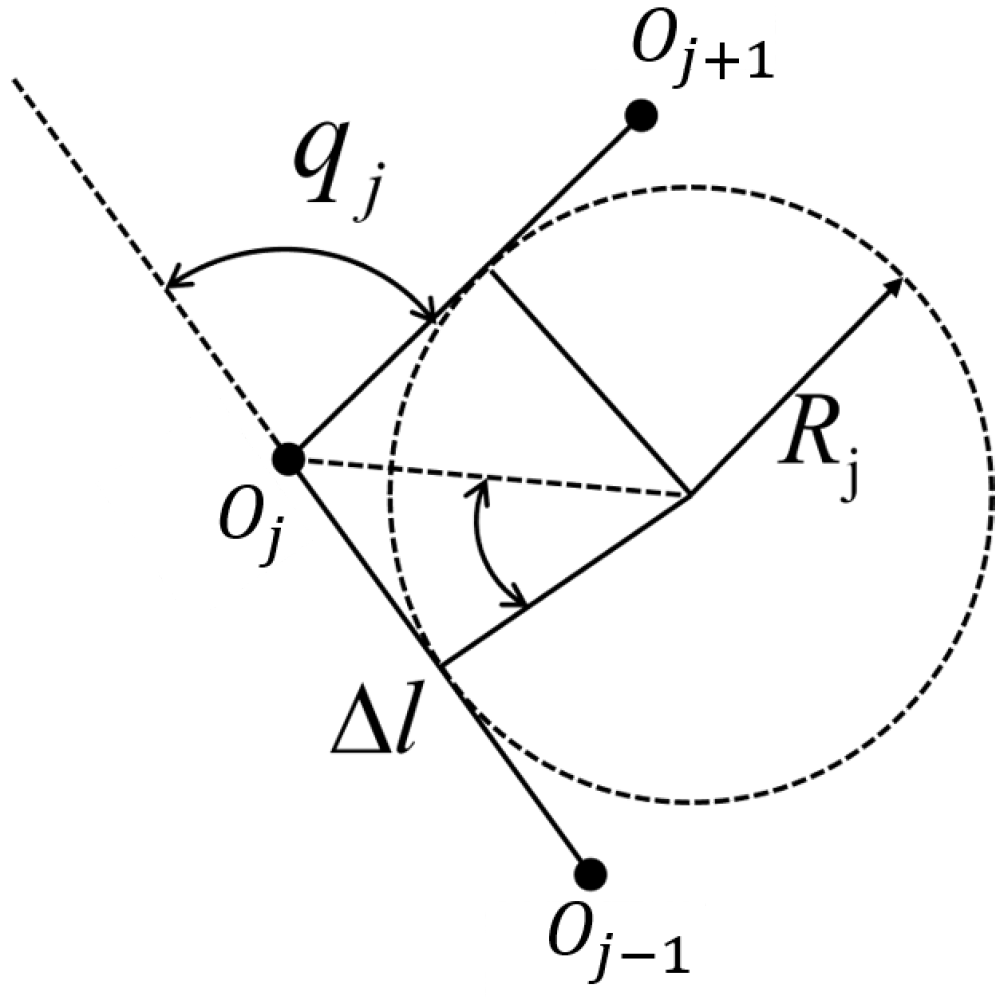
3.3.1. Elastic Bending Forces
3.3.2. Detailed Newton-Euler Dynamic Algorithm
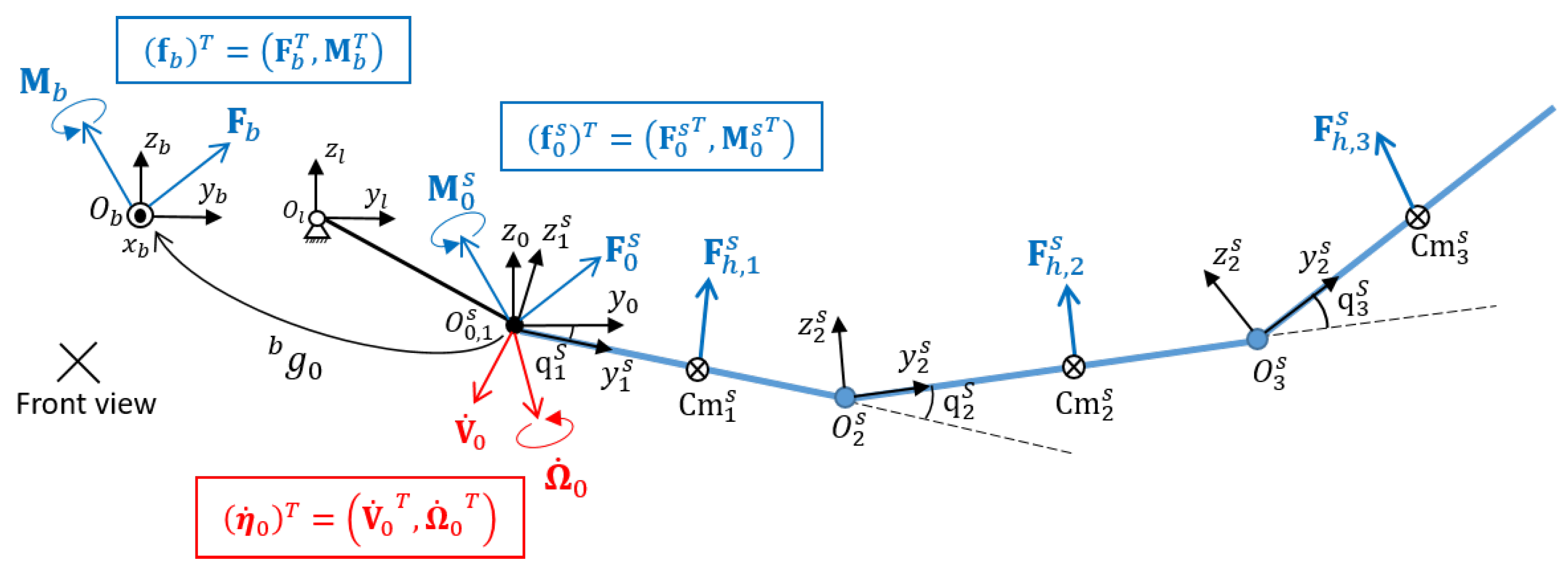
3.4. Motion Equations of the Body of Robot
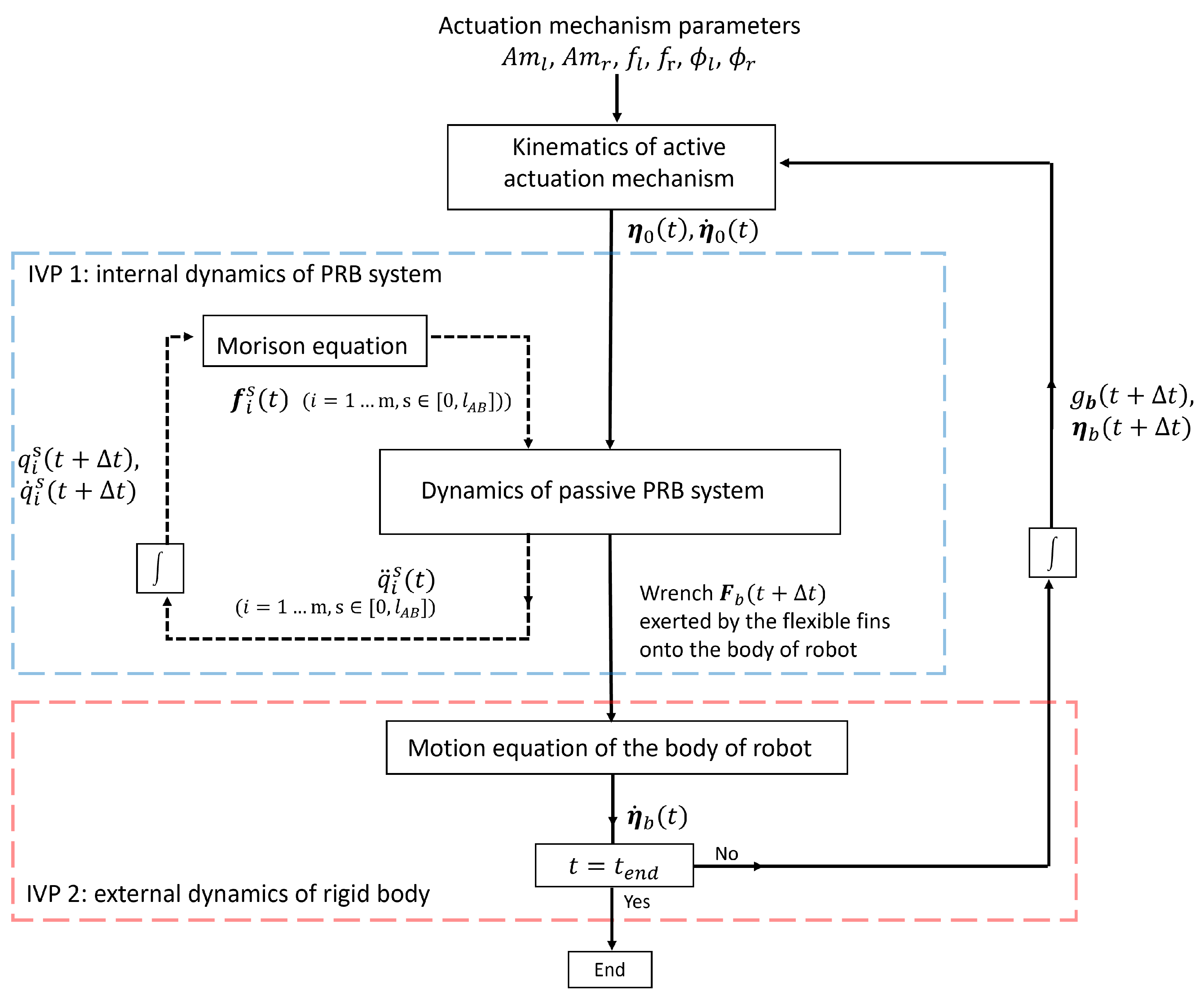
4. Computational Aspect of Flexible-Rigid Coupling System Based on NEDA
5. Numerical Simulations
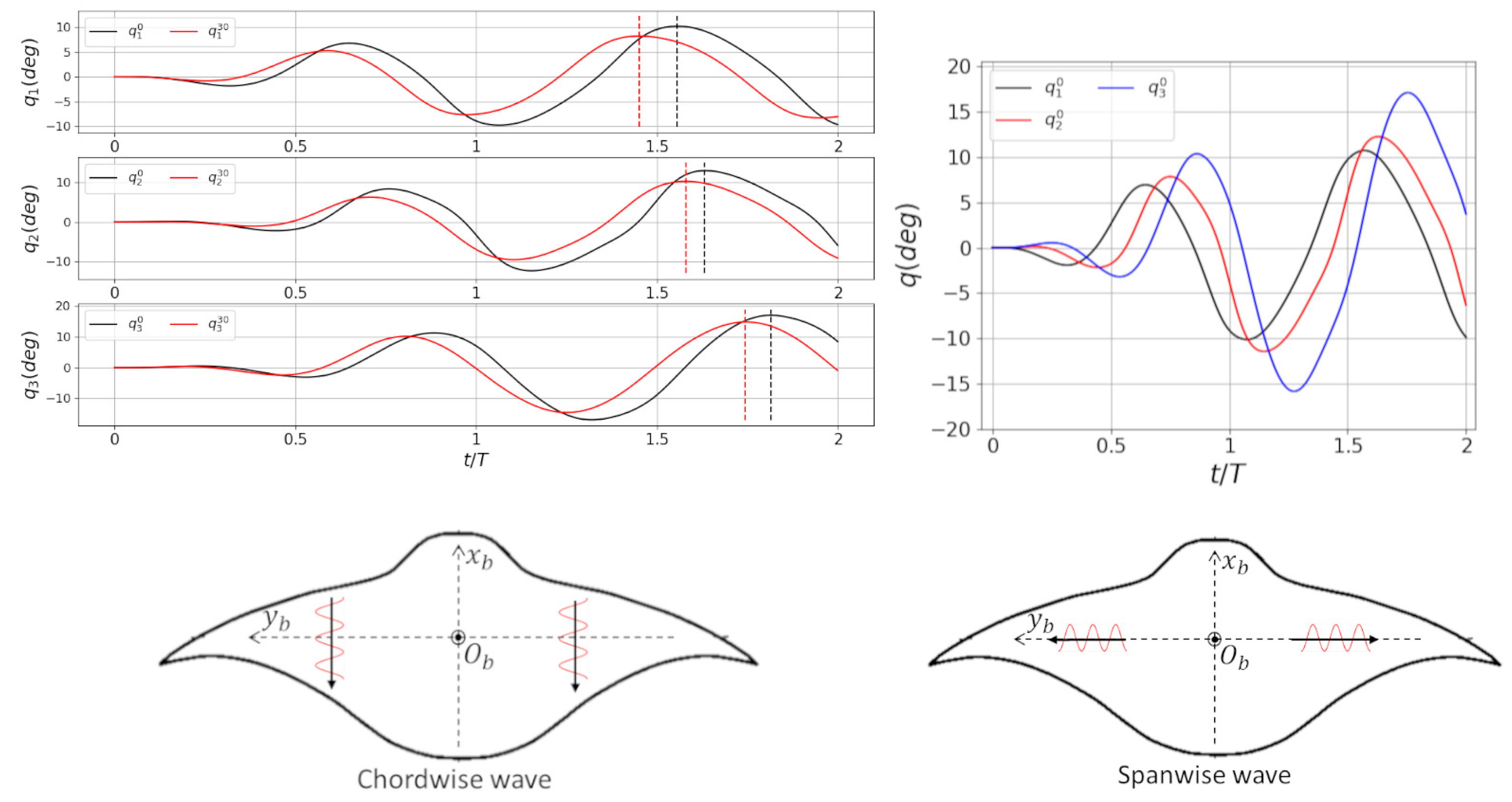
5.1. Verification of Wave Transmission
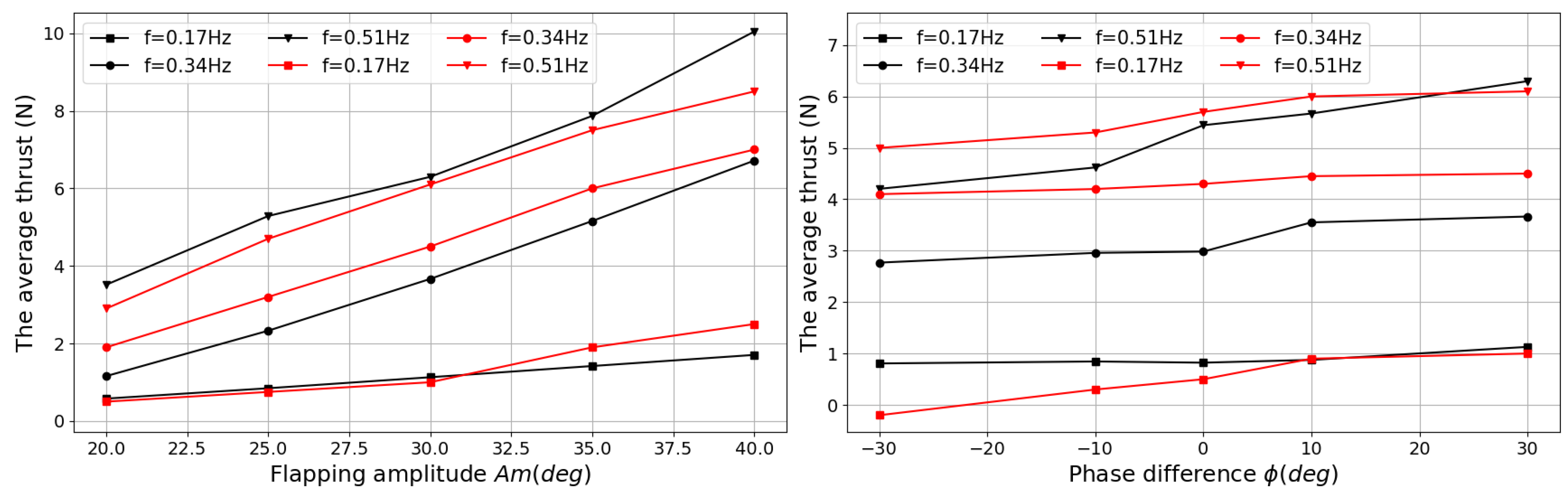
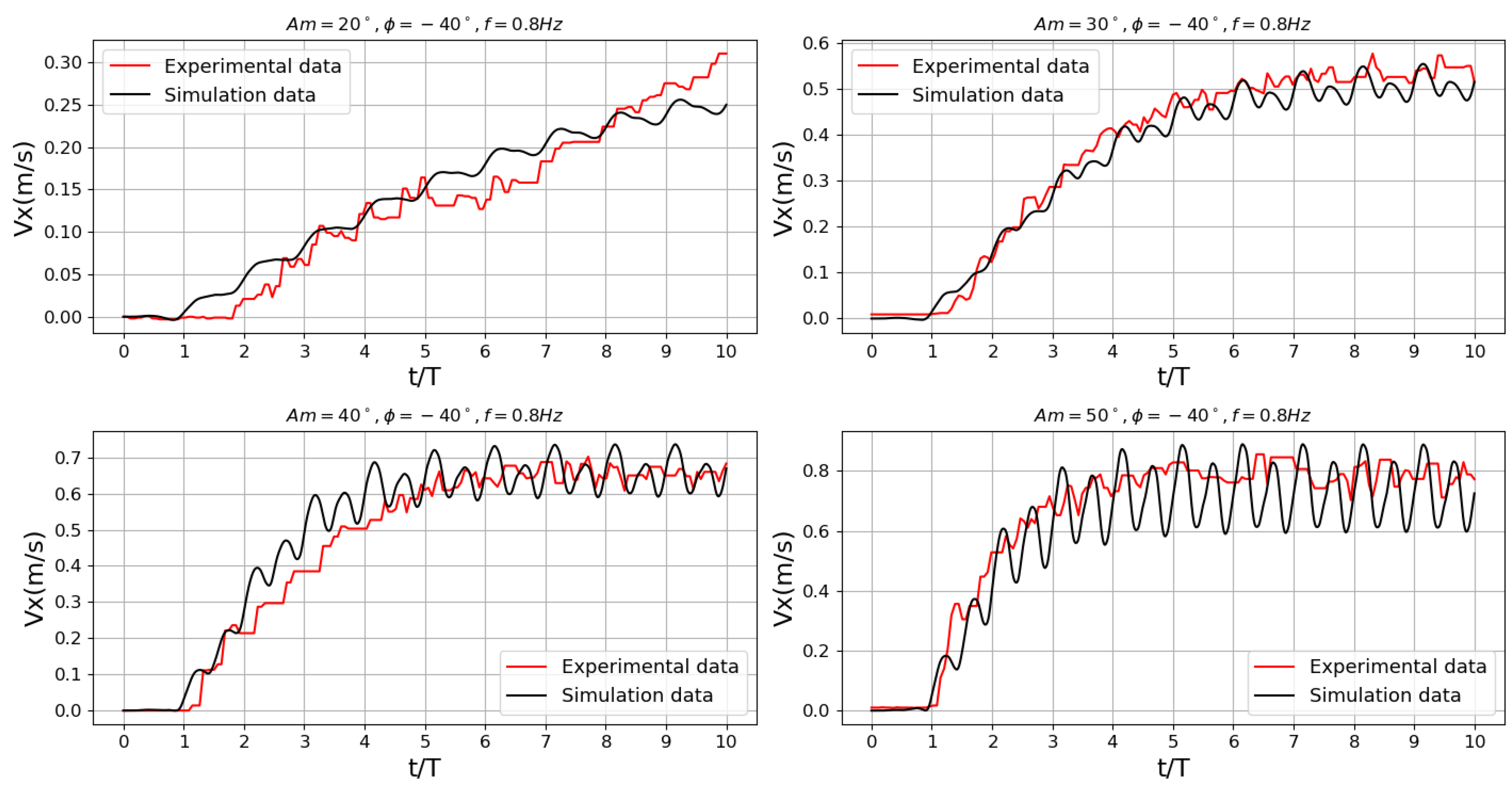
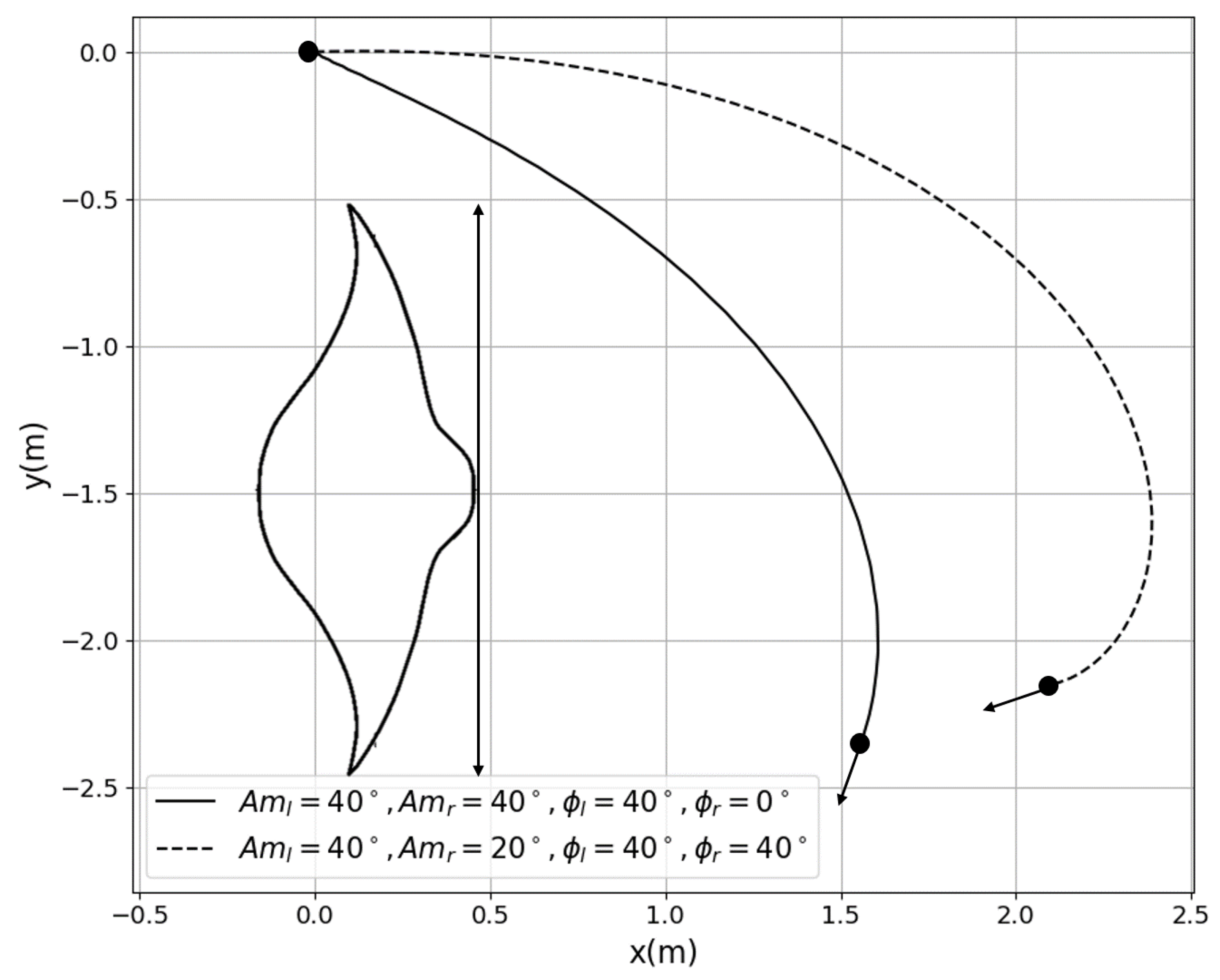
5.2. Simulation of Different Gaits
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MPF | Median and Paired Fin |
| PRB | Pseudo-Rigid Body |
| FSI | Fluid Structure Interaction |
| BCF | Body and/or Caudal Fin |
| NEDA | Newton-Euler Dynamics Algorithm |
| CFD | Computational Fluid Dynamics |
| PRBMs | Pseudo-Rigid-Body Models |
References
- Dharmdas, A.; Patil, A.Y.; Baig, A.; Hosmani, O.Z.; Mathad, S.N.; Patil, M.B.; Kumar, R.; Kotturshettar, B.B.; Fattah, I.M.R. An Experimental and Simulation Study of the Active Camber Morphing Concept on Airfoils Using Bio-Inspired Structures. Biomimetics 2023, 8, 251. [Google Scholar] [CrossRef] [PubMed]
- Patil, A.Y.; Hegde, C.; Savanur, G.; Kanakmood, S.M.; Contractor, A.M.; Shirashyad, V.B.; Chivate, R.M.; Kotturshettar, B.B.; Mathad, S.N.; Patil, M.B.; et al. Biomimicking Nature-Inspired Design Structures—An Experimental and Simulation Approach Using Additive Manufacturing. Biomimetics 2022, 7, 186. [Google Scholar] [CrossRef] [PubMed]
- Cui, Z.; Yang, Z.; Shen, L.; Jiang, H. Complex modal analysis of the movements of swimming fish propelled by body and/or caudal fin. Wave Motion 2018, 78, 83–97. [Google Scholar] [CrossRef]
- Kato, N. Median and paired fin controllers for biomimetic marine vehicles. Appl. Mech. Rev. 2005, 58, 238–252. [Google Scholar] [CrossRef]
- Dewar, H.; Mous, P.; Domeier, M.; Muljadi, A.; Pet, J.; Whitty, J. Movements and site fidelity of the giant manta ray, Manta birostris, in the Komodo Marine Park, Indonesia. Mar. Biol. 2008, 155, 121–133. [Google Scholar] [CrossRef]
- Xing, C.; Cao, Y.; Cao, Y.; Pan, G.; Huang, Q. Asymmetrical oscillating morphology hydrodynamic performance of a novel bionic pectoral fin. J. Mar. Sci. Eng. 2022, 10, 289. [Google Scholar] [CrossRef]
- Belkhiri, A.; Porez, M.; Boyer, F. A hybrid dynamic model of an insect-like mav with soft wings. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 108–115. [Google Scholar]
- Porez, M.; Boyer, F.; Belkhiri, A. A hybrid dynamic model for bio-inspired soft robots—Application to a flapping-wing micro air vehicle. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 3556–3563. [Google Scholar]
- Boyer, F.; Porez, M. Multibody system dynamics for bio-inspired locomotion: From geometric structures to computational aspects. Bioinspir. Biomim. 2015, 10, 025007. [Google Scholar] [CrossRef] [PubMed]
- Khalil, W. Dynamic modeling of robots using recursive newton-euler techniques. In Proceedings of the ICINCO 2010, 7th International Conference on Informatics in Control, Automation and Robotics, Madeira, Portugal, 15–18 June 2010. [Google Scholar]
- Meng, Y.; Wu, Z.; Dong, H.; Wang, J.; Yu, J. Toward a Novel Robotic Manta With Unique Pectoral Fins. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1663–1673. [Google Scholar] [CrossRef]
- Corke, P.; Trevelyan, J.; Mason, R.; Burdick, J. Construction and modelling of a carangiform robotic fish. In Experimental Robotics VI, Proceedings of the 6th International Symposium on Experimental Robotics; Sydney, Australia, 26–28 March 1999, Springer: Berlin/Heidelberg, Germany, 2000; pp. 235–242. [Google Scholar]
- Yu, J.; Yuan, J.; Wu, Z.; Tan, M. Data-driven dynamic modeling for a swimming robotic fish. IEEE Trans. Ind. Electron. 2016, 63, 5632–5640. [Google Scholar] [CrossRef]
- Khan, A.; Wang, X.; Li, Z.; Wang, L.; Elahi, A.; Imran, M. Analytical and Numerical Study of Underwater Tether Cable Dynamics for Seabed Walking Robots Using Quasi-Static Approximation. J. Mar. Sci. Eng. 2023, 11, 1539. [Google Scholar] [CrossRef]
- Lighthill, M. Hydromechanics of aquatic animal propulsion. Annu. Rev. Fluid Mech. 1969, 1, 413–446. [Google Scholar] [CrossRef]
- Lighthill, M.J. Large-amplitude elongated-body theory of fish locomotion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1971, 179, 125–138. [Google Scholar]
- Porez, M.; Boyer, F.; Ijspeert, A.J. Improved Lighthill fish swimming model for bio-inspired robots: Modeling, computational aspects and experimental comparisons. Int. J. Robot. Res. 2014, 33, 1322–1341. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, H.; Wang, Z.; He, Q.; Chen, L.; Li, W.; Li, R.; Cui, W. A Manta Ray Robot with Soft Material Based Flapping Wing. J. Mar. Sci. Eng. 2022, 10, 962. [Google Scholar] [CrossRef]
- Design and implementation of multi-level linkage mechanism bionic pectoral fin for manta ray robot. Ocean Eng. 2023, 284, 115152. [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Armanini, C.; Boyer, F.; Mathew, A.T.; Duriez, C.; Renda, F. Soft robots modeling: A structured overview. IEEE Trans. Robot. 2023, 39, 1728–1748. [Google Scholar] [CrossRef]
- Huang, W.; Liu, M.; Hsia, K.J. A discrete model for the geometrically nonlinear mechanics of hard-magnetic slender structures. Extrem. Mech. Lett. 2023, 59, 101977. [Google Scholar] [CrossRef]
- Li, Q.; Chen, T.; Chen, Y.; Wang, Z. An underwater bionic crab soft robot with multidirectional controllable motion ability. Ocean Eng. 2023, 278, 114412. [Google Scholar] [CrossRef]
- Colbrook, M.J.; Townsend, A. Rigorous data-driven computation of spectral properties of Koopman operators for dynamical systems. Commun. Pure Appl. Math. 2024, 77, 221–283. [Google Scholar] [CrossRef]
- Habibi, H.; Yang, C.; Godage, I.S.; Kang, R.; Walker, I.D.; Branson, D.T., III. A Lumped-Mass Model for Large Deformation Continuum Surfaces Actuated by Continuum Robotic Arms. J. Mech. Robot. 2019, 12, 011014. [Google Scholar] [CrossRef]
- Troeung, C.; Liu, S.; Chen, C. Modelling of Tendon-Driven Continuum Robot Based on Constraint Analysis and Pseudo-Rigid Body Model. IEEE Robot. Autom. Lett. 2023, 8, 989–996. [Google Scholar] [CrossRef]
- Naughton, N.; Sun, J.; Tekinalp, A.; Parthasarathy, T.; Chowdhary, G.; Gazzola, M. Elastica: A compliant mechanics environment for soft robotic control. IEEE Robot. Autom. Lett. 2021, 6, 3389–3396. [Google Scholar] [CrossRef]
- Howell, L.L.; Midha, A.; Norton, T.W. Evaluation of equivalent spring stiffness for use in a pseudo-rigid-body model of large-deflection compliant mechanisms. J. Mech. Des. 1996, 118, 126–131. [Google Scholar] [CrossRef]
- Day, R.E. Coupling Dynamics in Aircraft: A Historical Perspective; National Aeronautics and Space Administration, Office of Management, Scientific and Technical Information Program: Washington, DC, USA, 1997; Volume 532. [Google Scholar]
- El-Hawary, F. The Ocean Engineering Handbook; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Chenevier, J.; González, D.; Aguado, J.V.; Chinesta, F.; Cueto, E. Reduced-order modeling of soft robots. PLoS ONE 2018, 13, e0192052. [Google Scholar] [CrossRef]
- Bao, P.; Shi, L.; Zhang, Z.; Guo, S. Kinematics Simulation Based on Fluent of a Bionic Manta ray Robot. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 249–254. [Google Scholar]
- Jawed, M.; Novelia, A.; O’Reilly, O. A Primer on the Kinematics of Discrete Elastic Rods; SpringerBriefs in Applied Sciences and Technology; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Xie, X.; Herault, J.; Lebastard, V.; Boyer, F. Recursive inverse dynamics of a swimming snake-like robot with a tree-like mechanical structure. In Proceedings of the 2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), Berlin, Germany, 5–7 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 65–70. [Google Scholar]
- Khalil, W.; Gallot, G.; Boyer, F. Dynamic modeling and simulation of a 3-D serial eel-like robot. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2007, 37, 1259–1268. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| L | 0.315 m | 9800 | |
| 0.185 m | E | Pa | |
| n | 30 | 0.1 Nm/s | |
| m | 3 | diag (0.02, 0.04, 0.1) | |
| 20 kg | diag (0.015, 0.01, 0.02) | ||
| diag (1.33, 1.93, 2.73) kg· | diag (0.32, 0.4, 0.8) | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, Y.; Xie, X.; Zhang, S.; Xing, C.; Cao, Y.; Cao, Y.; Pan, G.; Song, B. A Rigid-Flexible Coupling Dynamic Model for Robotic Manta with Flexible Pectoral Fins. J. Mar. Sci. Eng. 2024, 12, 292. https://doi.org/10.3390/jmse12020292
Qu Y, Xie X, Zhang S, Xing C, Cao Y, Cao Y, Pan G, Song B. A Rigid-Flexible Coupling Dynamic Model for Robotic Manta with Flexible Pectoral Fins. Journal of Marine Science and Engineering. 2024; 12(2):292. https://doi.org/10.3390/jmse12020292
Chicago/Turabian StyleQu, Yilin, Xiao Xie, Shucheng Zhang, Cheng Xing, Yong Cao, Yonghui Cao, Guang Pan, and Baowei Song. 2024. "A Rigid-Flexible Coupling Dynamic Model for Robotic Manta with Flexible Pectoral Fins" Journal of Marine Science and Engineering 12, no. 2: 292. https://doi.org/10.3390/jmse12020292
APA StyleQu, Y., Xie, X., Zhang, S., Xing, C., Cao, Y., Cao, Y., Pan, G., & Song, B. (2024). A Rigid-Flexible Coupling Dynamic Model for Robotic Manta with Flexible Pectoral Fins. Journal of Marine Science and Engineering, 12(2), 292. https://doi.org/10.3390/jmse12020292