
Weak Fault Feature Extraction and Enhancement of Autonomous Underwater Vehicle Thrusters Based on Artificial Rabbits Optimization and Variational Mode Decomposition



Abstract
:1. Introduction
- (1)
- In this paper, we propose a noise reduction method called IARO-VMD, which is based on the improved ARO and VMD. This method combines ARO and VMD for the first time to extract weak fault features of AUV thrusters and reduce the running time. To further enhance the performance of the ARO method in extracting weak fault features of AUV thrusters, we employ chaotic mapping and Gaussian variational methods;
- (2)
- In this paper, we propose a method for enhancing weak fault features by combining the energy operator and MB. In this method, we first apply the energy operator to process the fault feature signals and transform them into the energy domain, thereby increasing the significance of the fault feature. Then, MB is used to analyze and model the signals in the energy domain more accurately, further enhancing the weak fault feature. Finally, we propose appropriate improvement methods to solve the new problem introduced by the energy operator.
2. The IARO-VMD Method
2.1. The Reason for the Long Running Time When De-Noising AUV Thruster Fault Signals Based on VMD
2.2. Analyzing the Problems That Exist and Their Reasons after Introducing the ARO Algorithm to Address the Issue of Long Running Time in the VMD Method
- (1)
- The ARO method initializes the rabbit population using uniformly distributed random numbers, which lack randomness and traversal, leading to a tendency to fall into local optimal solutions;
- (2)
- In the later stage of iteration, there is no mechanism to escape from local optimal solutions, making it difficult to obtain the global optimal solution. When using the traditional ARO method to calculate fitness and update the position, each rabbit tends to update its position with another randomly selected rabbit in the population. This method uses random numbers that follow a standard normal distribution to increase perturbation as a way to enhance global search capabilities and avoid local optima. However, in the later stages of iteration, all search individuals cluster in a smaller region, and this setting precludes effective escape from local optima.
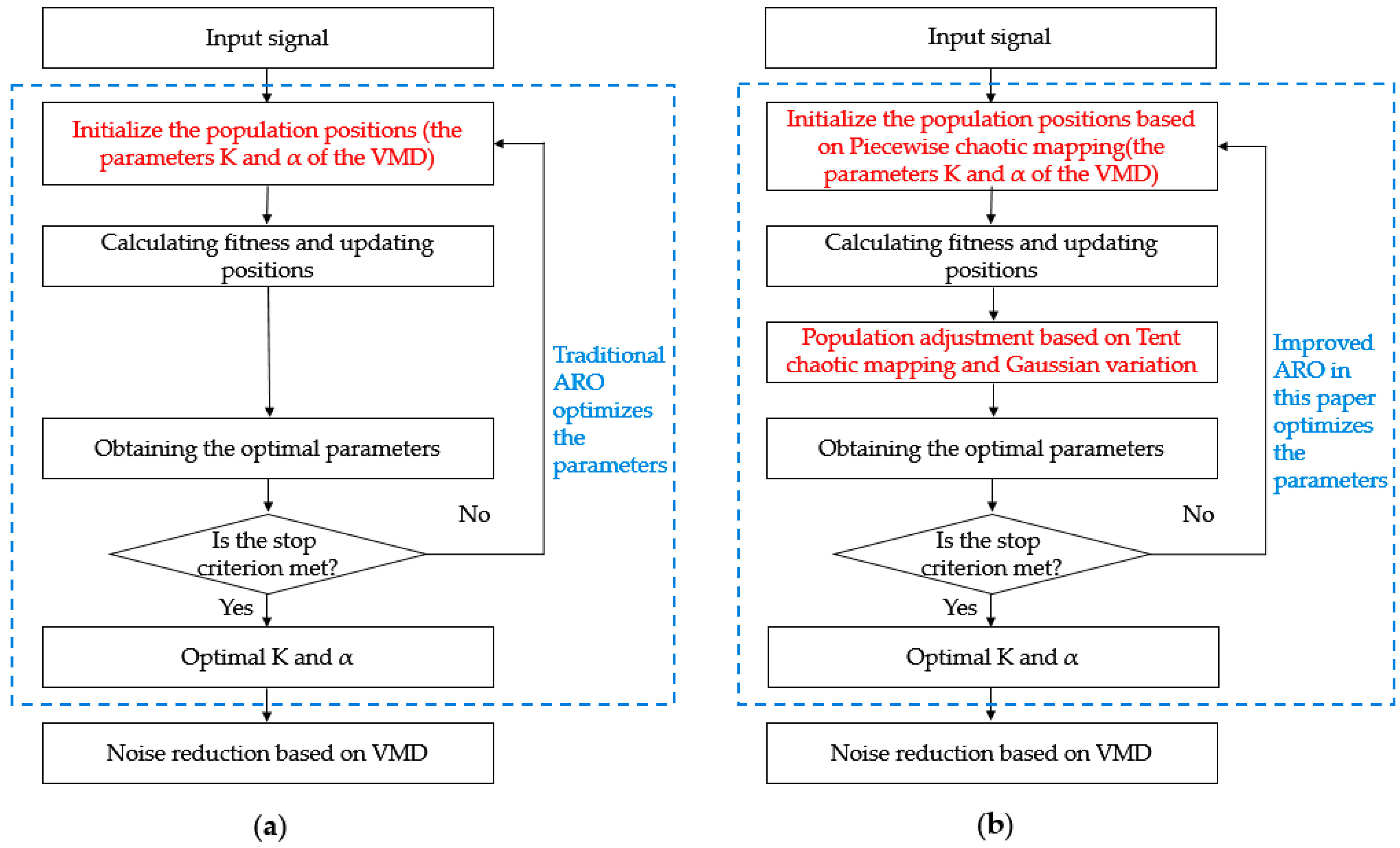
2.3. Improvements of the Proposed Method
2.4. Implementation of the Proposed Method
- (a)
- If fi < fa, indicating the occurrence of “convergence”, Gaussian mutation is performed. If the fitness function value of the new position is lower than the old position, the position is replaced.
- (b)
- If fi ≥ fa, indicating the occurrence of “divergence”, Tent chaotic mapping is performed. If the fitness function value of the new position is lower than the old position, the position is replaced.
3. The EO-MB Method
3.1. Problems of MB
3.2. Introduction of Energy Operator
3.3. Methods in This Study
4. Experiment Verification
4.1. Experimental Environment
4.2. Experiment Verification of IARO-VMD
4.2.1. Effectiveness of IARO-VMD in Noise Reduction and Running Time Reduction
- (1)
- The running time of the VMD-based method with the introduction of ARO is about 10% of that of the method proposed in reference [20]. This indicates that the introduction of the ARO method can effectively reduce the running time.
- (2)
- The runtime of IARO-VMD is comparable to that of the VMD-based method with the introduction of ARO, with a negligible difference. This suggests that the improvement of ARO in this study does not introduce a significant increase in the computation load of the ARO algorithm.
- (3)
4.2.2. The Respective Effects of Improvement (1) and Improvement (2)
4.3. Experimental Verification of EO-MB
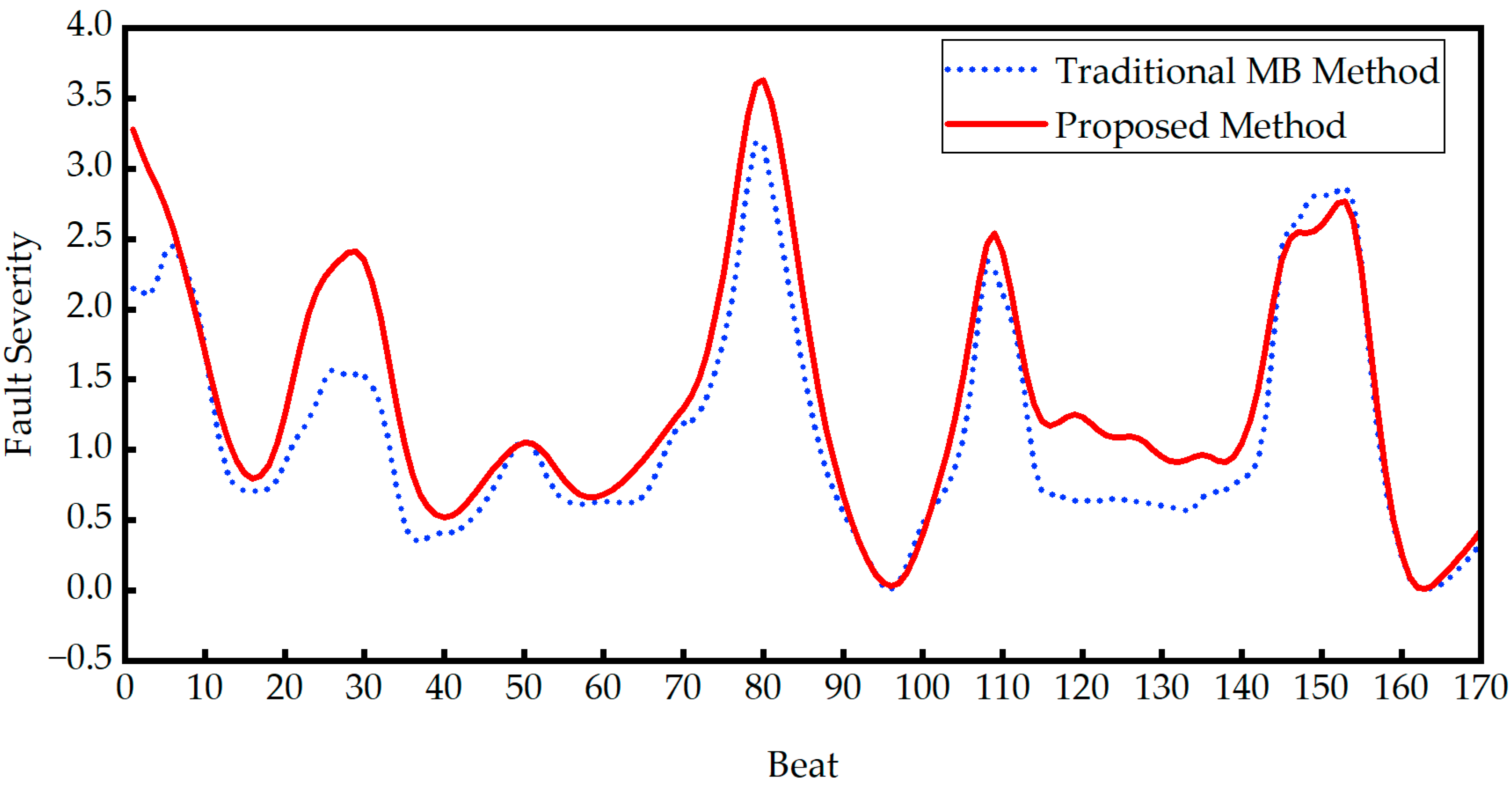
4.3.1. Weak Fault Feature Enhancement Effect of Surge Velocity Signal
4.3.2. Weak Fault Feature Enhancement Effect of the Yaw Angle Signal, Lateral Thruster Control Signal, and Main Thruster Control Signal
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, J.; Huang, F.; Wu, D.; Cui, Y.; Yan, Z.; Zhang, K. Deep reinforcement learning based multi-AUVs cooperative decision-making for attack-defense confrontation missions. Ocean Eng. 2021, 239, 109794. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, X.; Xie, T.; Miao, J. A new sensor inspired by the lateral-line system of fish using the self-powered d33 mode piezoelectric diaphragm for hydrodynamic sensing. Mech. Syst. Signal Proc. 2020, 141, 106476. [Google Scholar] [CrossRef]
- Fang, X.; Xie, L.H.; Li, X.L. Distributed localization in dynamic networks via complex laplacian. Automatica 2023, 151, 110915. [Google Scholar] [CrossRef]
- Hernandez-Sanchez, A.; Poznyak, A.; Chairez, I.; Andrianova, O. Robust 3-D autonomous navigation of submersible ship using averaged sub-gradient version of integral sliding mode. Mech. Syst. Signal Proc. 2021, 149, 107169. [Google Scholar] [CrossRef]
- Wang, F.R.; Chen, Z.; Song, G.B. Smart crawfish: A concept of underwater multi-bolt looseness identification using entropy-enhanced active sensing and ensemble learning. Mech. Syst. Signal Proc. 2021, 149, 107186. [Google Scholar] [CrossRef]
- Li, J.T.; Wang, Z.H.; Wang, Y.J.; Zhang, M.J.; Raissi, T. Interval Velocity Estimation for Unmanned Underwater Vehicles. IEEE Control Syst. Lett. 2023, 7, 715–720. [Google Scholar] [CrossRef]
- Gao, S.; He, B.; Yu, F.; Zhang, X.; Yan, T.H.; Feng, C. An abnormal motion condition monitoring method based on the dynamic model and complex network for AUV. Ocean Eng. 2021, 237, 109472. [Google Scholar] [CrossRef]
- Che, G.F.; Yu, Z. ADP based output-feedback fault-tolerant tracking control for underactuated AUV with actuators faults. J. Intell. Fuzzy Syst. 2023, 45, 5871–5883. [Google Scholar] [CrossRef]
- Lin, X.; Tian, W.; Zhang, W.; Zeng, J.; Zhang, C. The leaderless multi-AUV system fault-tolerant consensus strategy under heterogeneous communication topology. Ocean Eng. 2021, 237, 109594. [Google Scholar] [CrossRef]
- Zhu, C.; Huang, B.; Zhou, B.; Su, Y.M.; Zhang, E.H. Adaptive model-parameter-free fault-tolerant trajectory tracking control for autonomous underwater vehicles. Isa Trans. 2021, 114, 57–71. [Google Scholar] [CrossRef]
- Wu, P.; Harris, C.A.; Salavasidis, G.; Lorenzo-Lopez, A.; Kamarudzaman, I.; Phillips, A.B.; Thomas, G.; Anderlini, E. Unsupervised anomaly detection for underwater gliders using generative adversarial networks. Eng. Appl. Artif. Intell. 2021, 104, 104379. [Google Scholar] [CrossRef]
- Zhu, D.; Cheng, X.; Yang, L.; Chen, Y.; Yang, S.X. Information Fusion Fault Diagnosis Method for Deep-Sea Human Occupied Vehicle Thruster Based on Deep Belief Network. IEEE Trans. Cybern. 2022, 52, 9414–9427. [Google Scholar] [CrossRef]
- Zhang, M.; Yin, B.; Liu, W.; Wang, Y. Feature extraction and fusion for thruster faults of AUV with random disturbance. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2015, 43, 22–26, 54. [Google Scholar] [CrossRef]
- Hamilton, K.; Lane, D.M.; Brown, K.E.; Evans, J.; Taylor, N.K. An integrated diagnostic architecture for autonomous underwater vehicles. J. Field Robot. 2007, 24, 497–526. [Google Scholar] [CrossRef]
- Li, J.; Li, J.; Chen, H.; Zhang, Y.; Xie, Y. Propeller feature extraction of UUVs study based on CEEMD combined with symmetric correlation. In Proceedings of the 2nd International Conference on Computer Science Communication and Network Security (CSCNS), Sanya, China, 22–23 December 2021. [Google Scholar] [CrossRef]
- Xiang, X.B.; Yu, C.Y.; Zhang, Q. On intelligent risk analysis and critical decision of underwater robotic vehicle. Ocean Eng. 2017, 140, 453–465. [Google Scholar] [CrossRef]
- Shi, H.; Song, Z.; Bai, X.; Zhang, K. Attention mechanism-based multisensor data fusion neural network for fault diagnosis of autonomous underwater vehicles. J. Field Robot. 2023. [Google Scholar] [CrossRef]
- Zhang, M.; Yin, B.; Liu, X.; Guo, J. Thruster fault identification method for autonomous underwater vehicle using peak region energy and least square grey relational grade. Adv. Mech. Eng. 2015, 7, 1687814015622905. [Google Scholar] [CrossRef]
- Gong, W.; Lv, T.; Wang, Y.; Di, F. Weak Fault Feature Extraction Method for Autonomous Underwater Vehicles based on Wavelet Packets and FFT. In Proceedings of the 4th IEEE Advanced Information Technology, Electronic and Automation Control Conference, IAEAC 2019, Chengdu, China, 20–22 December 2019. [Google Scholar] [CrossRef]
- Yu, D.; Zhang, M.; Liu, X.; Yao, F. Fault feature extraction and fusion method for AUV with weak thruster fault based on variational mode decomposition and D-S evidence theory. Math. Biosci. Eng. 2022, 19, 9335–9356. [Google Scholar] [CrossRef]
- Cui, D.; Zhang, T.; Zhang, M.; Liu, X. Feature extraction and severity identification for autonomous underwater vehicle with weak thruster fault. J. Mar. Sci. Technol. 2022, 27, 1105–1115. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Qian, Z.H.; Lu, C.G. Research on VMD based adaptive denoising method applied to water supply pipeline leakage location. Measurement 2020, 151, 107153. [Google Scholar] [CrossRef]
- Cui, H.; Guan, Y.; Chen, H. Rolling Element Fault Diagnosis Based on VMD and Sensitivity MCKD. IEEE Access 2021, 9, 120297–120308. [Google Scholar] [CrossRef]
- Jin, Z.; Chen, D.; He, D.; Sun, Y.; Yin, X. Bearing Fault Diagnosis Based on VMD and Improved CNN. J. Fail. Anal. Prev. 2023, 23, 165–175. [Google Scholar] [CrossRef]
- Jiang, X.; Shen, C.; Shi, J.; Zhu, Z. Initial center frequency-guided VMD for fault diagnosis of rotating machines. J. Sound Vibr. 2018, 435, 36–55. [Google Scholar] [CrossRef]
- Yan, X.A.; Jia, M.P. Application of CSA-VMD and optimal scale morphological slice bispectrum in enhancing outer race fault detection of rolling element bearings. Mech. Syst. Signal Proc. 2019, 122, 56–86. [Google Scholar] [CrossRef]
- Wu, L.; Liu, Y.; Wu, S.; Ren, J.; Teng, W. Composite fault diagnosis of wind turbine gearboxes based on VMD cepstral transform. J. Vib. Shock 2023, 42, 221–256. [Google Scholar] [CrossRef]
- Feng, R.; Yinzhong, Y.; Xianghua, M. Application of VMD-AR method in fault diagnosis of ROV propeller. In Proceedings of the 11th CAA Symposium on Fault Detection, Supervision, and Safety for Technical Processes, SAFEPROCESS 2019, Xiamen, China, 5–7 July 2019. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Li, C.S.; Fu, W.L.; Liu, J.; Yu, T.; Chen, H. A modified variational mode decomposition method based on envelope nesting and multi-criteria evaluation. J. Sound Vibr. 2020, 468, 115099. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Vellingiri, M.; Rawa, M.; Alghamdi, S.; Alhussainy, A.A.; Ali, Z.M.; Turky, R.A.; Refaat, M.M.; Aleem, S. Maximum hosting capacity estimation for renewables in power grids considering energy storage and transmission lines expansion using hybrid sine cosine artificial rabbits algorithm. Ain Shams Eng. J. 2023, 14, 102092. [Google Scholar] [CrossRef]
- Li, Y.J.; Wang, J.X.; Feng, D.J.; Jiang, M.S.; Peng, C.; Geng, X.Y.; Zhang, F.Y. Bearing fault diagnosis method based on maximum noise ratio kurtosis product deconvolution with noise conditions. Measurement 2023, 221, 113542. [Google Scholar] [CrossRef]
- Zhang, R.C.; Sun, W.L.; Liang, W.Z. Kernel principal component analysis fault diagnosis method based on improving Golden Jackal optimization algorithm. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2023. [Google Scholar] [CrossRef]
- Chen, Y.G.; Wang, Q.S.; Zhong, R.; Shi, X.J.; Qin, B. Fiber orientation and boundary stiffness optimization of laminated cylindrical shells with elastic boundary for maximum the fundamental frequency by an improved sparrow search algorithm. Thin-Walled Struct. 2023, 193, 111299. [Google Scholar] [CrossRef]
- Wang, X.; Xu, D. A novel image encryption scheme based on Brownian motion and PWLCM chaotic system. Nonlinear Dyn. 2014, 75, 345–353. [Google Scholar] [CrossRef]
- Nezhad, S.Y.D.; Safdarian, N.; Zadeh, S.A.H. New method for fingerprint images encryption using DNA sequence and chaotic tent map. Optik 2020, 224, 165661. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Y.; Wang, L.; Qu, J. Bearing fault detection using an alternative analytic energy operator: A fast and non-filtering method. Meas. Sci. Technol. 2021, 32, 105101. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, L.; Xu, Y. Enhancement of bearing fault detection using an alternative analytic energy operator and sparse Bayesian step-filtering. J. Mech. Sci. Technol. 2021, 35, 905–920. [Google Scholar] [CrossRef]
- Xu, H.; Cai, C.; Chi, Y.; Zhang, N. Fault diagnosis of gearbox based on adaptive wavelet de-noising and convolution neural network. Adv. Mech. Eng. 2023, 15, 16878132231157186. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Du, Z. Multiscale Noise Reduction Attention Network for Aeroengine Bearing Fault Diagnosis. IEEE Trans. Instrum. Meas. 2023, 72, 3513810. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantage | Shortcoming |
|---|---|---|
| MB | Low complexity Insensitive to outliers in data | Susceptible to noise Susceptible to data quality |
| EMD | Simple and easy to understand Adaptive decomposition Analyzable nonlinear and non-stationary signal | Mode mixing Susceptible to noise Sensitive to outliers in data |
| Fault Severity | The VMD-Based Method in Reference [20] | The VMD-Based Method with the Introduction of ARO | IARO-VMD | |||
|---|---|---|---|---|---|---|
| SNR | Running Time (s) | SNR | Running Time (s) | SNR | Running Time (s) | |
| 10% | 36.18 | 302.2 | 37.15 | 10% | 36.18 | 302.2 |
| 8% | 36.58 | 420.3 | 36.24 | 8% | 36.58 | 420.3 |
| 5% | 38.06 | 395.2 | 36.14 | 5% | 38.06 | 395.2 |
| Fault Severity | The VMD-Based Method with the Introduction of ARO | Only Using Improvement (1) | Only Using Improvement (2) | IARO-VMD |
|---|---|---|---|---|
| 10% | 37.15 | 38.22 | 37.68 | 43.62 |
| 8% | 36.24 | 39.55 | 39.75 | 39.56 |
| 5% | 36.14 | 35.77 | 38.85 | 40.06 |
| Fault Severity | Traditional MB Method | Proposed Method | Percentage of Increase in Fault Feature Value | ||
|---|---|---|---|---|---|
| Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | ||
| 10% | 3.18 | 32.8 | 3.63 | 10% | 3.18 |
| 8% | 2.47 | 39.8 | 3.22 | 8% | 2.47 |
| 5% | 2.66 | 35.4 | 2.71 | 5% | 2.66 |
| Fault Severity | Traditional MB Method | Employing the Energy Operator Alone | Proposed Method | Percentage of Increase in Fault Feature Value | |||
|---|---|---|---|---|---|---|---|
| Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | ||
| 10% | 2.56 | 33.1 | 2.11 | 33.2 | 2.56 | 33.4 | 0.00% |
| 8% | 1.90 | 40.5 | 1.56 | 39.9 | 2.23 | 38.3 | 17.37% |
| 5% | 1.65 | 35.9 | 1.08 | 36.3 | 1.71 | 36.6 | 3.64% |
| Fault Severity | Traditional MB Method | Employing the Energy Operator Alone | Proposed Method | Percentage of Increase in Fault Feature Value | |||
|---|---|---|---|---|---|---|---|
| Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | ||
| 10% | 2.56 | 35.5 | 2.14 | 34.9 | 2.52 | 35.9 | −1.56% |
| 8% | 2.39 | 38.7 | 1.37 | 39.2 | 3.23 | 38.2 | 35.15% |
| 5% | 2.15 | 36.9 | 2.45 | 35.6 | 2.71 | 36.1 | 26.05% |
| Fault Severity | Traditional MB Method | Employing the Energy Operator Alone | Proposed Method | Percentage of Increase in Fault Feature Value | |||
|---|---|---|---|---|---|---|---|
| Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | Fault Feature Value | Running Time (s) | ||
| 10% | 3.56 | 39.8 | 2.88 | 39.4 | 3.62 | 38.3 | 1.69% |
| 8% | 2.89 | 37.2 | 3.26 | 36.9 | 3.78 | 37.3 | 30.80% |
| 5% | 1.78 | 40.1 | 2.01 | 39.5 | 2.07 | 38.2 | 16.30% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D.; Zhang, M.; Yao, F.; Li, J. Weak Fault Feature Extraction and Enhancement of Autonomous Underwater Vehicle Thrusters Based on Artificial Rabbits Optimization and Variational Mode Decomposition. J. Mar. Sci. Eng. 2024, 12, 455. https://doi.org/10.3390/jmse12030455
Yu D, Zhang M, Yao F, Li J. Weak Fault Feature Extraction and Enhancement of Autonomous Underwater Vehicle Thrusters Based on Artificial Rabbits Optimization and Variational Mode Decomposition. Journal of Marine Science and Engineering. 2024; 12(3):455. https://doi.org/10.3390/jmse12030455
Chicago/Turabian StyleYu, Dacheng, Mingjun Zhang, Feng Yao, and Jitao Li. 2024. "Weak Fault Feature Extraction and Enhancement of Autonomous Underwater Vehicle Thrusters Based on Artificial Rabbits Optimization and Variational Mode Decomposition" Journal of Marine Science and Engineering 12, no. 3: 455. https://doi.org/10.3390/jmse12030455
APA StyleYu, D., Zhang, M., Yao, F., & Li, J. (2024). Weak Fault Feature Extraction and Enhancement of Autonomous Underwater Vehicle Thrusters Based on Artificial Rabbits Optimization and Variational Mode Decomposition. Journal of Marine Science and Engineering, 12(3), 455. https://doi.org/10.3390/jmse12030455