
Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions

Abstract
:1. Introduction
2. Data
3. The Construction of the Deployment Model
3.1. Zero–One Construction of the Integer Programming Coverage Model
3.2. Algorithm Design of 0–1 Integer Programming Coverage Model
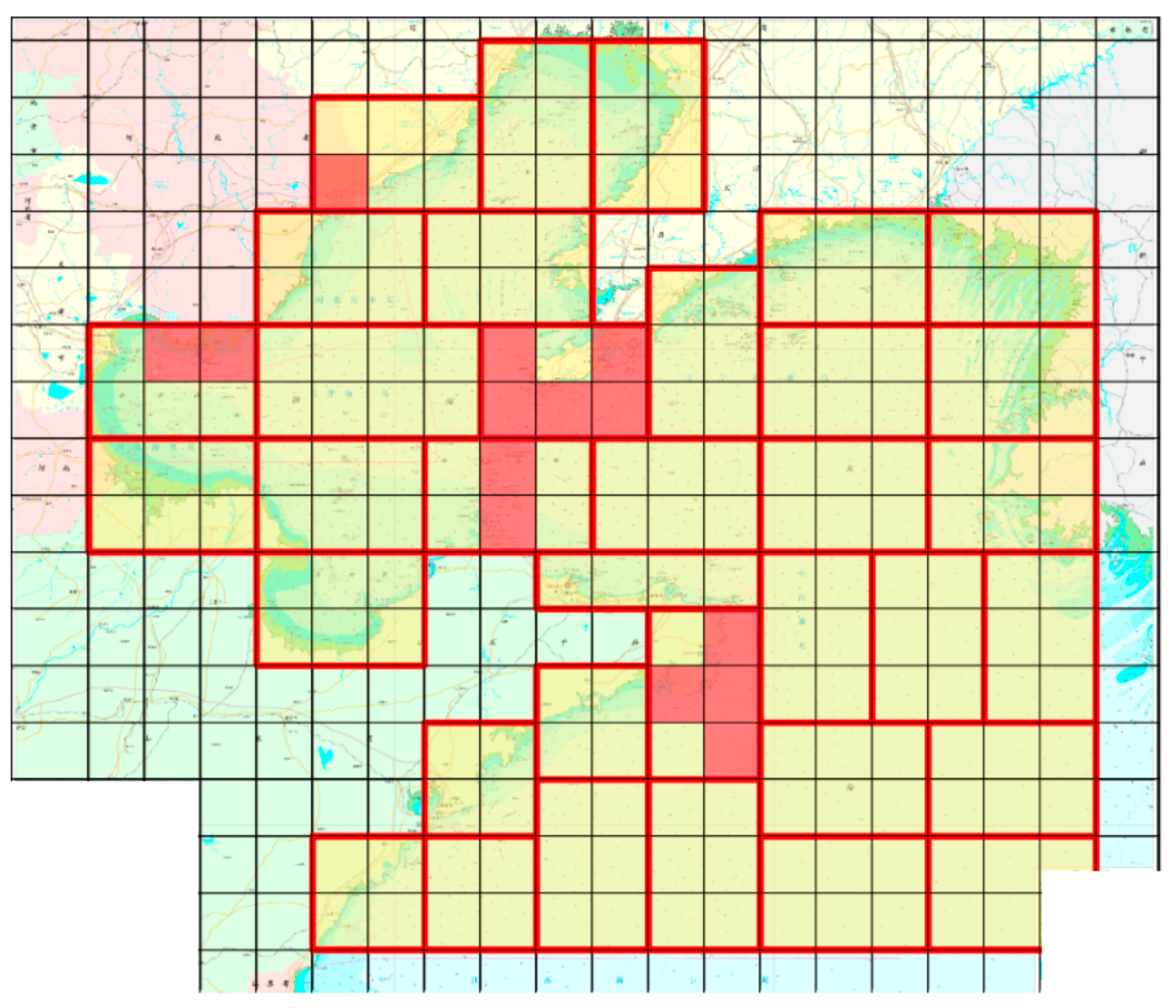
4. Case Analysis of Deployment in the North Sea Area (Results)
4.1. Existing Standby Positions of Rescue Vessels in the North Sea Area
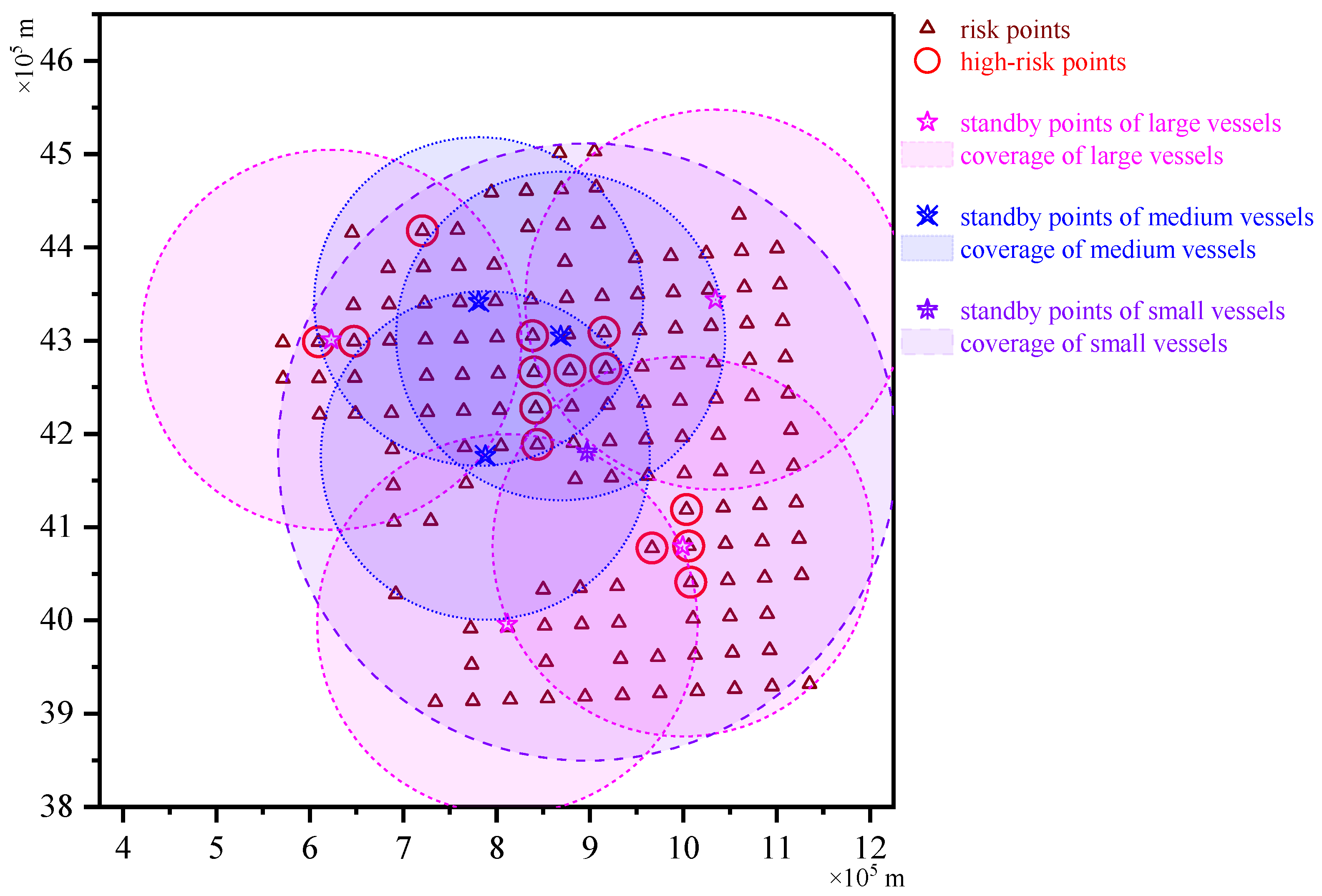
4.2. Numerical Simulation Analysis of Professional Rescue Ships in the North Sea Area
4.3. Verification of the Superiority of the Deployment Plan
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hakimi, S.L. Optimum locations of switching centers and the absolute centers and medians of a graph. Oper. Res. 1964, 12, 450–459. [Google Scholar] [CrossRef]
- Hakimi, S.L. Optimum distribution of switching centers in a communication network and some related graph theoretic problems. Oper. Res. 1965, 13, 462–475. [Google Scholar] [CrossRef]
- Kariv, O.; Hakimi, S.L. An algorithmic approach to network location problems. I: The p-centers. SIAM J. Appl. Math. 1979, 37, 513–538. [Google Scholar] [CrossRef]
- Hakimi, S.L.; Schmeichel, E.F.; Pierce, J. On p-centers in networks. Transp. Sci. 1978, 12, 1–15. [Google Scholar] [CrossRef]
- Shier, D.R.; Dearing, P.M. Optimal locations for a class of nonlinear, single-facility location problems on a network. Oper. Res. 1983, 31, 292–303. [Google Scholar] [CrossRef]
- Ogryczak, W. On the distribution approach to location problems. Comput. Ind. Eng. 1999, 37, 595–612. [Google Scholar] [CrossRef]
- Wang, D.-W.; Zhang, G.-X. Model and algorithm to optimize location of catastrophic rescue center. J. Northeast. Univ. 2005, 26, 953. [Google Scholar]
- Alinaghian, M.; Aghaie, M.; Sabbagh, M.S. A mathematical model for location of temporary relief centers and dynamic routing of aerial rescue vehicles. Comput. Ind. Eng. 2019, 131, 227–241. [Google Scholar] [CrossRef]
- Chen, Z.; You, J. A modeling approach to hierarchical location problem of urban disaster prevention and mitigation facilities. J. Nat. Disaster 2005, 2, 131–135. [Google Scholar]
- Lai, Z.; Wang, Z.; Ge, D.; Chen, Y. A Robust Optimization Model for Multi objective Emergency Logistics Center Site Selection. Oper. Res. Manag. 2020, 29, 74–83. [Google Scholar]
- Moreno, A.; Alem, D.; Gendreau, M.; Munari, P. The heterogeneous multicrew scheduling and routing problem in road restoration. Transp. Res. Part B Methodol. 2020, 141, 24–58. [Google Scholar] [CrossRef]
- Wu, J.; Song, C.; Ma, J.; Wu, J.; Han, G. Reinforcement learning and particle swarm optimization supporting real-time rescue assignments for multiple autonomous underwater vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6807–6820. [Google Scholar] [CrossRef]
- Nahavandi, B.; Homayounfar, M.; Daneshvar, A.; Shokouhifar, M. Hierarchical structure modelling in uncertain emergency location-routing problem using combined genetic algorithm and simulated annealing. Int. J. Comput. Appl. Technol. 2022, 68, 150–163. [Google Scholar] [CrossRef]
- Khanchehzarrin, S.; Panah, M.G.; Mahdavi-Amiri, N.; Shiripour, S. A bi-level multi-objective location-routing optimization model for disaster relief operations considering public donations. Socio-Econ. Plan. Sci. 2022, 80, 101165. [Google Scholar] [CrossRef]
- Eliiyi, U. Artificial Intelligence for Smart Cities: Locational Planning and Dynamic Routing of Emergency Vehicles. In The Impact of Artificial Intelligence on Governance, Economics and Finance; Springer: Berlin/Heidelberg, Germany, 2022; Volume 2, pp. 41–63. [Google Scholar]
- Beiki, H.; Seyedhosseini, S.M.; Mihardjo, L.W.; Seyedaliakbar, S.M. Multiobjective location-routing problem of relief commodities with reliability. Environ. Sci. Pollut. Res. 2021, 28, 1–10. [Google Scholar] [CrossRef]
- Ye, F.; Zhao, Q.; Xi, M.; Dessouky, M. Chinese national emergency warehouse location research based on VNS algorithm. Electron. Notes Discret. Math. 2015, 47, 61–68. [Google Scholar] [CrossRef]
- Balcik, B. Site selection and vehicle routing for post-disaster rapid needs assessment. Transp. Res. Part E Logist. Transp. Rev. 2017, 101, 30–58. [Google Scholar] [CrossRef]
- Liu, J.; Xie, K. Emergency materials transportation model in disasters based on dynamic programming and ant colony optimization. Kybernetes 2017, 46, 656–671. [Google Scholar] [CrossRef]
- Sun, H.; Xiang, M. Research on Robust Optimization of Emergency Location and Path for Uncertain Demand under Facility Failure Risk. Chin. J. Manag. Sci. 2020, 28, 199–207. [Google Scholar]
- Razavi, N.; Gholizadeh, H.; Nayeri, S.; Ashrafi, T.A. A robust optimization model of the field hospitals in the sustainable blood supply chain in crisis logistics. J. Oper. Res. Soc. 2021, 72, 2804–2828. [Google Scholar] [CrossRef]
- Chen, X.; Liu, S.; Zhao, J.; Wu, H.; Xian, J.; Montewka, J. Autonomous port management based AGV path planning and optimization via an ensemble reinforcement learning framework. Ocean. Coast. Manag. 2024, 251, 107087. [Google Scholar] [CrossRef]
- Jin, Y.; Wang, N.; Song, Y.; Gao, Z. Optimization model and algorithm to locate rescue bases and allocate rescue vessels in remote oceans. Soft Comput. 2021, 25, 3317–3334. [Google Scholar] [CrossRef]
- Xiao, G.; Chen, L.; Chen, X.; Jiang, C.; Ni, A.; Zhang, C.; Zong, F. A Hybrid Visualization Model for Knowledge Mapping: Scientometrics, SAOM, and SAO. IEEE Trans. Intell. Transp. Syst. 2023, 1–14. [Google Scholar] [CrossRef]
- Chen, X.; Lv, S.; Shang, W.-L.; Wu, H.; Xian, J.; Song, C. Ship energy consumption analysis and carbon emission exploitation via spatial-temporal maritime data. Appl. Energy 2024, 360, 122886. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, N.; Gao, Z.; Wu, D.; Lin, W. Optimization Model and Algorithm for Site Selection of Rescue Bases for Far Sea Islands. Oper. Res. Manag. 2022, 31, 45–50. [Google Scholar]
- Deployment of Rescue Power of Beihai Rescue Bureau. Available online: www.bh-rescue.cn/jiuzhuzhinan/1580123544982265856.html (accessed on 2 November 2021).
- Rescue Vessels in Beihai Rescue Bureau. Available online: www.bh-rescue.cn/product/6/ (accessed on 2 November 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Standby Position | Deployed Rescue Vessels | Remarks | |
|---|---|---|---|---|
| 1 | Bohai Strait | Beihai No. 1 (38°35′ N/121°48′ E) | 8000 kW and above | Key standby point |
| 2 | South Huangcheng Island | |||
| 3 | Long Island | 6000 kW and above | Key standby point | |
| 4 | Longkou | Depending on the actual situation | Temporary standby point | |
| 5 | Dongying | Depending on the actual situation | Key standby point | |
| 6 | Qinhuangdao | Beihai No. 3 (39°10′ N/120°15′ E) | 8000 kW and above | Key standby point |
| 7 | Jingtang Port | |||
| 8 | Anchorage Outside The Harbor | |||
| 9 | Base | |||
| 10 | Dandong | Oceanic Island | ||
| 11 | Anchorage Outside The Harbor | |||
| 12 | Dalian | Dasanshan Island | ||
| 13 | Dalian Port Anchorage | 8000 kW and above | ||
| 14 | Base | High-speed rescue ship | Mobile standby point | |
| 15 | Yantai | Yantai Port Anchorage | 8000 kW and above | Key standby point |
| 16 | Tianjin | Beihai No. 2 (Caofeidian) (38°50′ N/118°25′ E) | 8000 kW and above | Key standby point |
| 17 | Dagukou Port Anchorage | |||
| 18 | Base | High-speed rescue ship | ||
| 19 | Rongcheng | Beihai No. 4 (About 15 nautical miles southeast of Shidao) | 8000 kW and above | Key standby point |
| 20 | Shidao Port | High-speed rescue ship | ||
| 21 | Base | High-speed rescue ship | ||
| 22 | Qingdao | Qingdao Port Anchorage | 8000 kW and above | Key standby point |
| 23 | Chaolian Island | |||
| 24 | Hui Island | |||
| 25 | Rizhao | Depending on the actual situation | Temporary standby point |
| No. | Ship Name | Total Length (m) | Full Displacement (t) | Engine Power (kW) | Speed (Knots) | Wind Resistance | Endurance (n.m.) | Response Time (from Alarm to Departure) |
|---|---|---|---|---|---|---|---|---|
| 1 | 101 | 117 | 6614 | 14,400 | 22 | 12 | 10,000 | 30 min (40 min in winter) |
| 2 | 111 | 98 | 4891 | 9000 | 20 | 12 | 10,000 | |
| 3 | 112 | 98 | 4896 | 9000 | 20 | 12 | 10,000 | |
| 4 | 113 | 99 | 5143 | 9000 | 20 | 12 | 10,000 | |
| 5 | 115 | 99 | 5127 | 9000 | 20 | 12 | 10,000 | |
| 6 | 116 | 99 | 5198 | 9000 | 20 | 12 | 10,000 | |
| 7 | 117 | 98.5 | 5748 | 9000 | 17.3 | 12 | 10,000 | |
| 8 | 118 | 99 | 5748 | 9000 | 17.3 | 12 | 14,000 | |
| 9 | 119 | 99 | 5748 | 9000 | 17.3 | 12 | 14,000 | |
| 10 | 131 | 77 | 3211 | 6720 | 18 | 12 | 5000 | |
| 11 | 201 | 49.9 | 250 | 4480 | 32.5 | 6 | 500 | 20 min (30 min in winter) |
| 12 | 203 | 49.9 | 278 | 5120 | 32.5 | 6 | 700 |
| Ship Type | Speed (Knots) | Endurance (n.m.) | Features |
|---|---|---|---|
| large | 20 | 10,000 | Advantages: high power, large towing force, strong wind resistance. Disadvantages: Long reaction time, poor maneuverability, and slow ship speed. |
| medium | 17.3 | 5000 and 14,000 | |
| small | 32.5 | 500 | Advantages: Fast, short reaction time. Disadvantages: Poor wind resistance, inability to sail in adverse weather, and poor endurance. |
| Ship Type | Speed (Knots) | Coverage Radius (Nautical Miles) | Coverage Radius (km) |
|---|---|---|---|
| Large rescue ship | 20 | 106.67 | 203.72 |
| Medium rescue ship | 17.3 | 92.27 | 176.22 |
| Small rescue ship | 32.5 | 178.75 | 331.05 |
| No. | Geographic Coordinates |
|---|---|
| 10 | Oceanic Island (39°3.93′ N/123°10.38′ E) |
| 16 | Beihai No. 2 (Caofeidian) (38°50′ N/118°25′ E) |
| 19 | Beihai No. 4 (About 15 nautical miles southeast of Shidao) (36°42.8′ N/122°35.3′ E) |
| 22 | Qingdao Port Anchorage (36°2.69′ N/120°27.44′ E) |
| 6 | Beihai No. 3 (39°10′ N/120°15′ E) |
| No. | Standby Points | Cartesian Coordinates |
|---|---|---|
| 4 | Longkou (37°40.76′ N/120°15.89′ E) | (788,032.144, 4,176,939.38) |
| 6 | Beihai No. 3 (39°10′ N/120°15′ E) | (780,905.029, 4,342,043.581) |
| 10 | Oceanic Island (39°3.93′ N/123°10.38′ E) | (1,034,469.749, 4,343,967.765) |
| 14 | Base (38°48.05′ N/121°14.57′ E) | (868,637.853, 4,304,957.123) |
| 15 | Yantai Port Anchorage (37°40.31′ N/121°29.96′ E) | (897,055.492, 4,180,627.022) |
| 16 | Beihai No. 2 (Caofeidian) (38°50′ N/118°25′ E) | (623,010.888, 4,300,957.382) |
| 19 | Beihai No. 4 (About 15 nautical miles southeast of Shidao) (36°42.8′ N/122°35.3′ E) | (999,515.532, 4,079,289.45) |
| 22 | Qingdao Port Anchorage (36°2.69′ N/120°27.44′ E) | (811,598.577, 3,996,042.447) |
| No. | Standby Points | Deployed Rescue Vessels |
|---|---|---|
| 4 | Longkou (37°40.76′ N/120°15.89′ E) | Medium |
| 6 | Beihai No. 3 (39°10′ N/120°15′ E) | Medium |
| 10 | Oceanic Island (39°3.93′ N/123°10.38′ E) | Large |
| 14 | Base (38°48.05′ N/121°14.57′ E) | Medium |
| 15 | Yantai Port Anchorage (37°40.31′ N/121°29.96′ E) | Small (Mobile standby point) |
| 16 | Beihai No. 2 (Caofeidian) (38°50′ N/118°25′ E) | Large |
| 19 | Beihai No. 4 (About 15 nautical miles southeast of Shidao) (36°42.8′ N/122°35.3′ E) | Large |
| 22 | Qingdao Port Anchorage (36°2.69′ N/120°27.44′ E) | Large |
| No. | Standby Points | Cartesian Coordinates | Deployed Rescue Vessels |
|---|---|---|---|
| 1 | Beihai No. 1 (38°35′ N/121°48′ E) | (918,344.103, 4,283,194.123) | Large |
| 3 | Long Island | (829,653.656, 4,204,325.851) | Medium |
| 6 | Beihai No. 3 (39°10′ N/120°15′ E) | (780,905.029, 4,342,043.581) | Large |
| 14 | Base (38°48.05′ N/121°14.57′ E) | (868,637.853, 4,304,957.123) | Small (Mobile standby point) |
| 15 | Yantai Port Anchorage (37°40.31′ N/121°29.96′ E) | (897,055.492, 4,180,627.022) | Large |
| 16 | Beihai No. 2 (Caofeidian) (38°50′ N/118°25′ E) | (623,010.888, 4,300,957.382) | Large |
| 19 | Beihai No. 4 (About 15 nautical miles southeast of Shidao) (36°42.8′ N/122°35.3′ E) | (999,515.532, 4,079,289.45) | Large |
| 22 | Qingdao Port Anchorage (36°2.69′ N/120°27.44′ E) | (811,598.577, 3,996,042.447) | Large |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, M.; Wu, B.; Li, Y.; Jiang, X. Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions. J. Mar. Sci. Eng. 2024, 12, 497. https://doi.org/10.3390/jmse12030497
Shao M, Wu B, Li Y, Jiang X. Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions. Journal of Marine Science and Engineering. 2024; 12(3):497. https://doi.org/10.3390/jmse12030497
Chicago/Turabian StyleShao, Minghui, Biao Wu, Yan Li, and Xiaoli Jiang. 2024. "Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions" Journal of Marine Science and Engineering 12, no. 3: 497. https://doi.org/10.3390/jmse12030497
APA StyleShao, M., Wu, B., Li, Y., & Jiang, X. (2024). Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions. Journal of Marine Science and Engineering, 12(3), 497. https://doi.org/10.3390/jmse12030497