
Coupled Dynamic Characteristics of a Spar-Type Offshore Floating Two-Bladed Wind Turbine with a Flexible Hub Connection



Abstract
:1. Introduction
2. Theoretical Model
2.1. Dynamic Equation
2.2. Equation of the Teeter Movement
2.3. Morison Equation
2.4. Potential Theory
3. Numerical Methodology
3.1. Multi-Body Simulation
3.2. Wind Turbine Model
3.3. Floating Spar-Buoy Platform Model
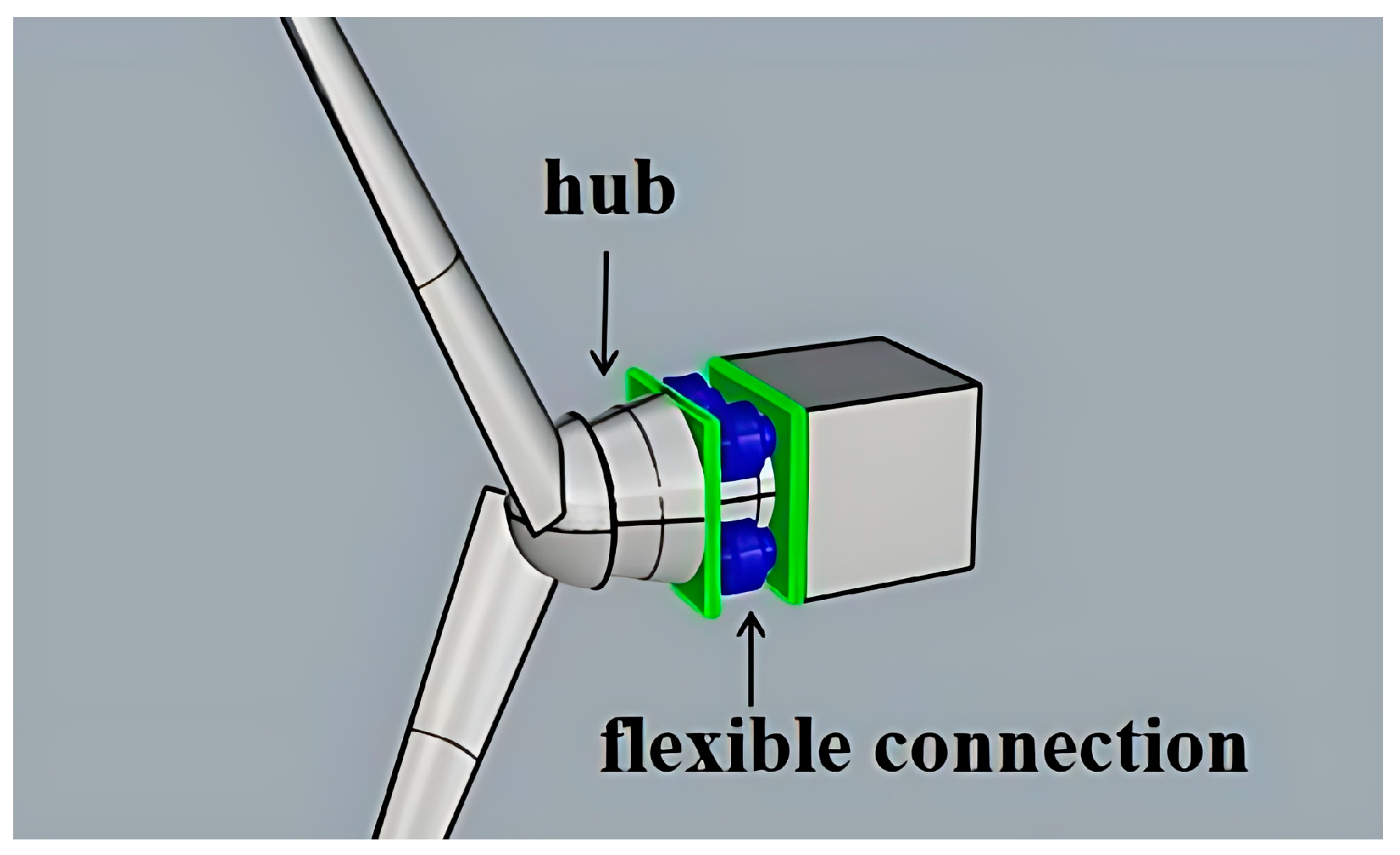
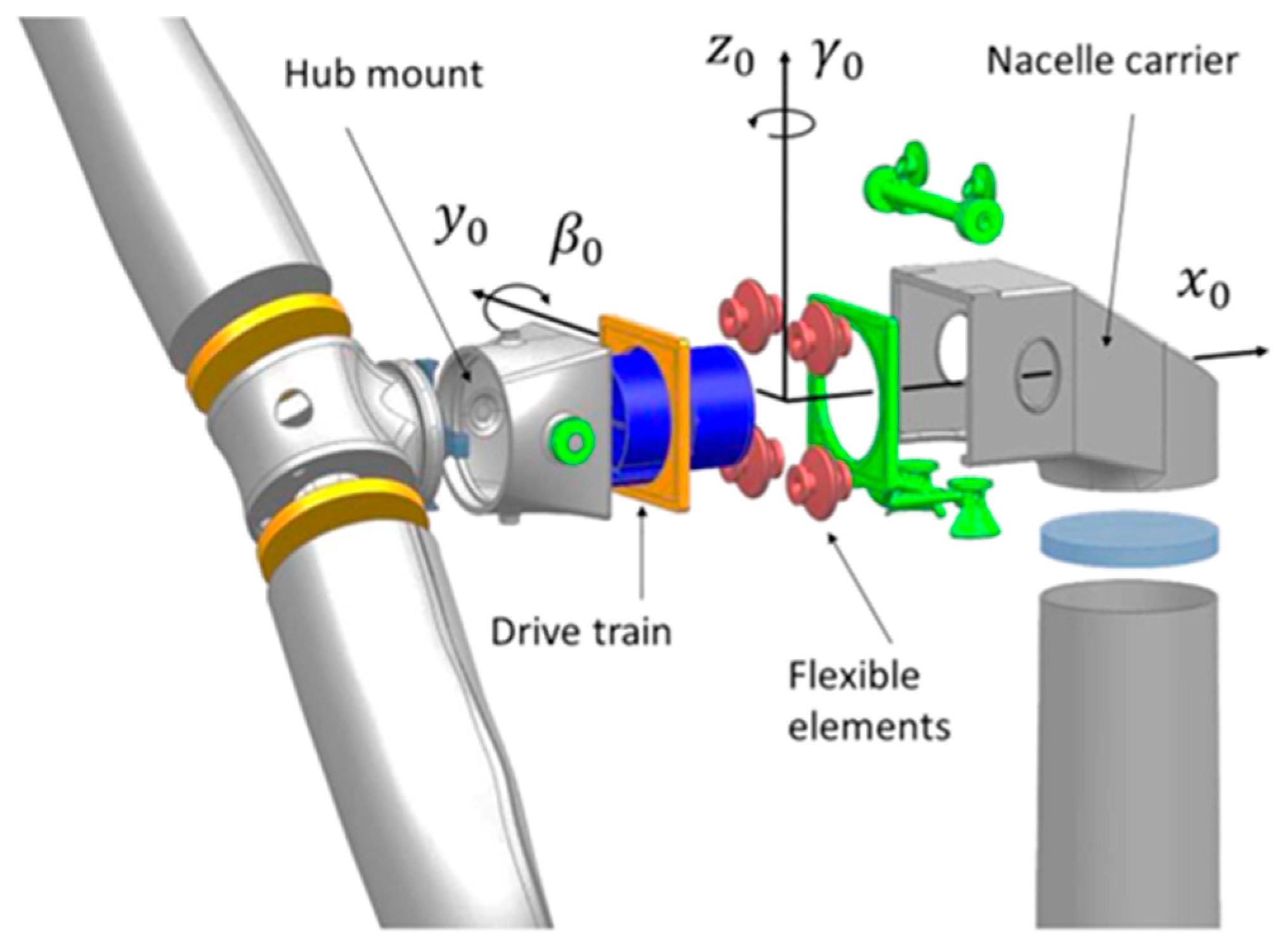
3.4. Flexible Hub Connection
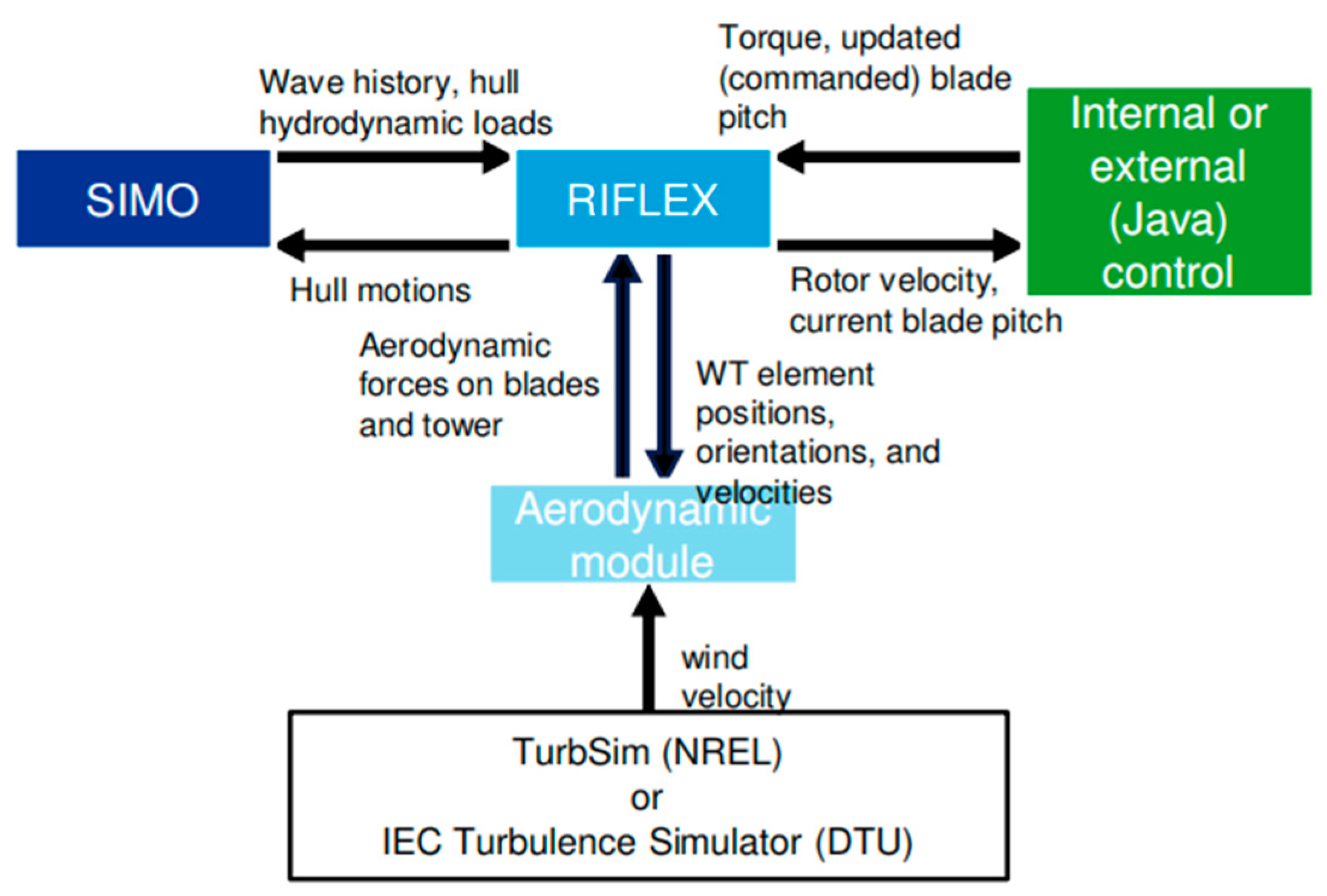
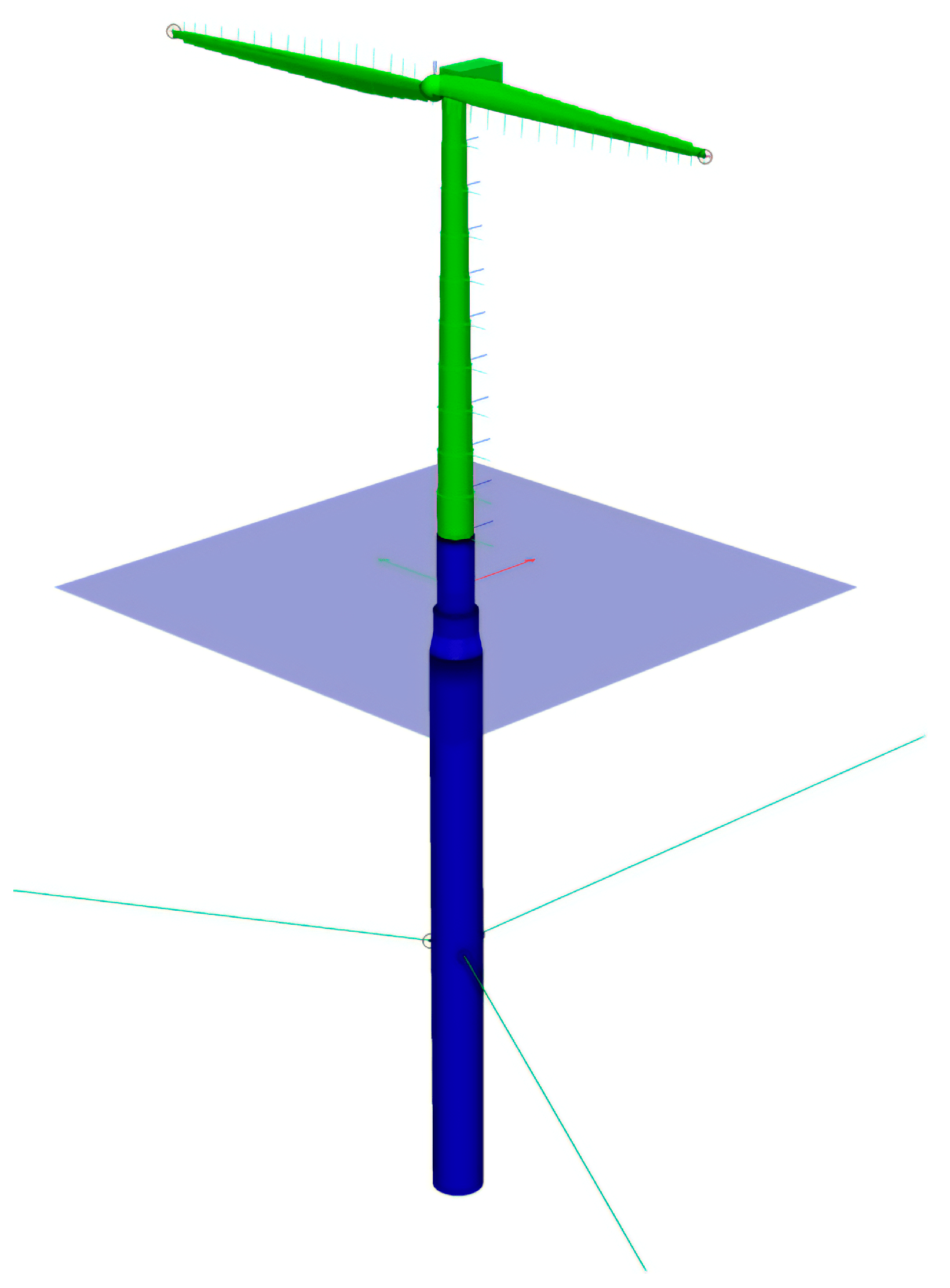
3.5. Fully Coupled Model
3.6. Environment Load Cases
4. Results and Discussion
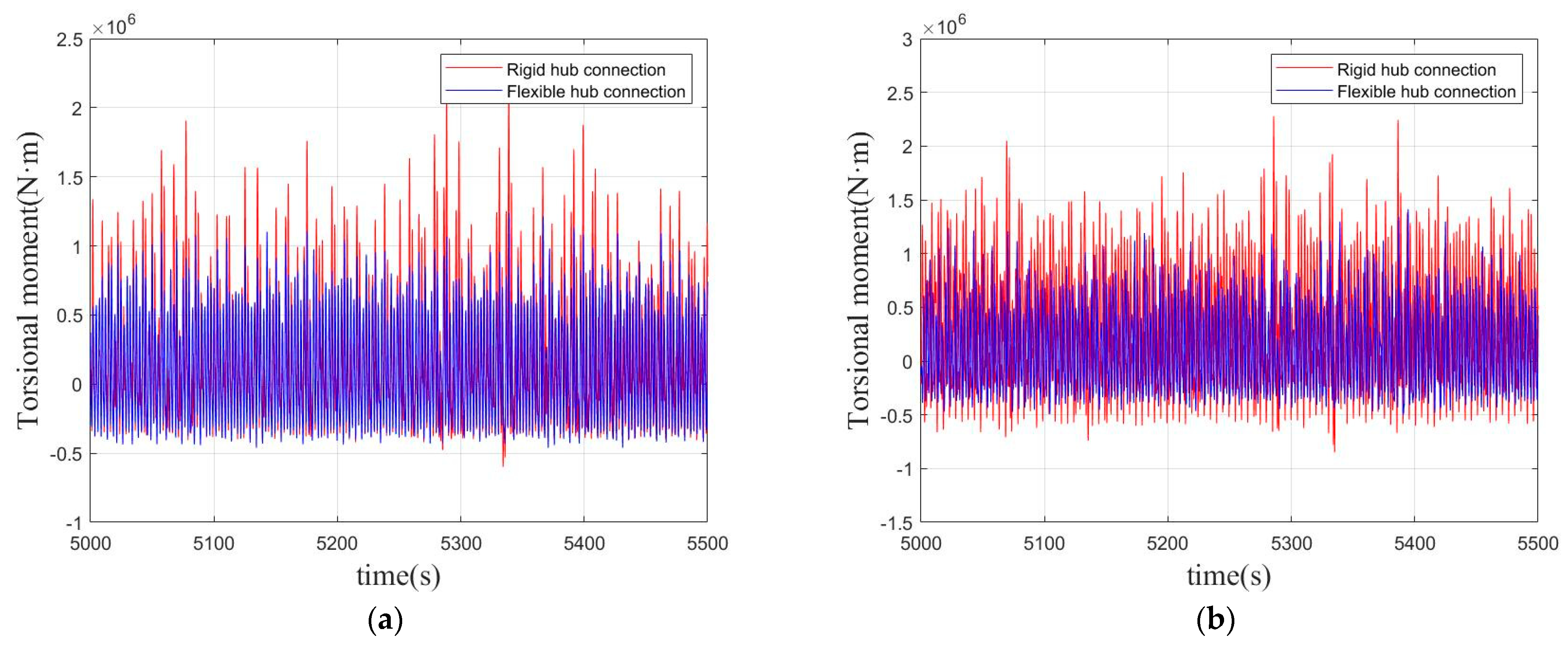
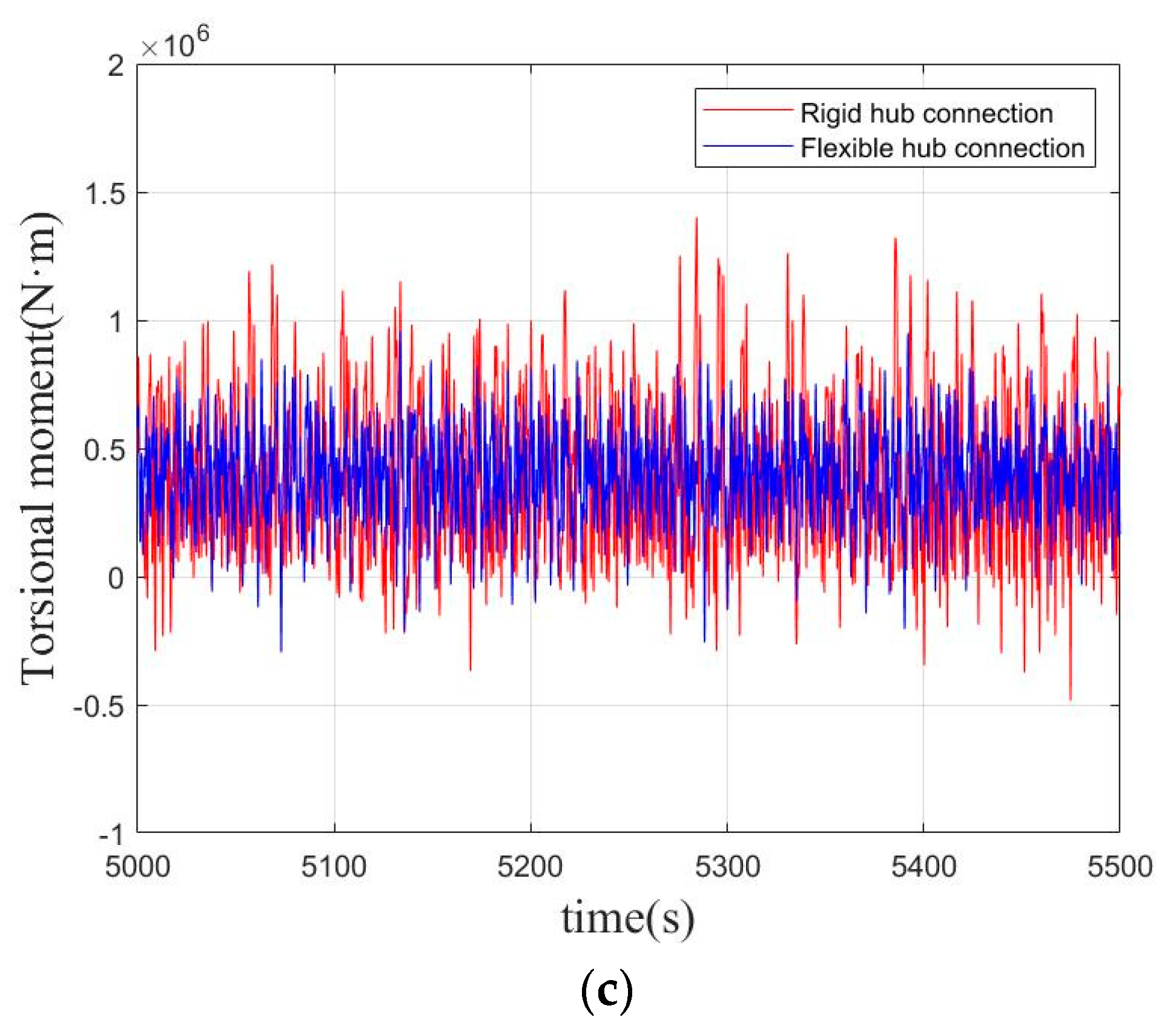
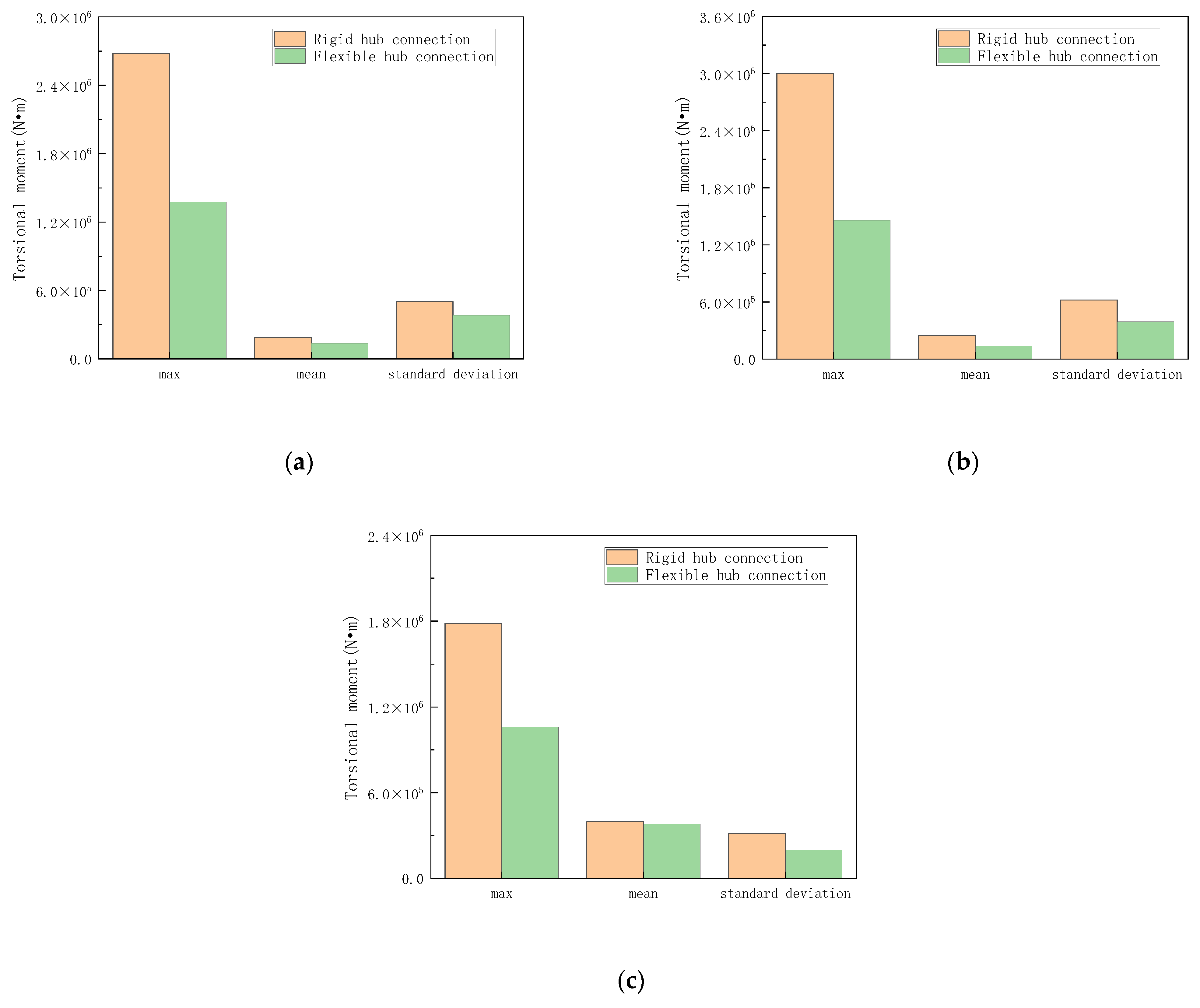
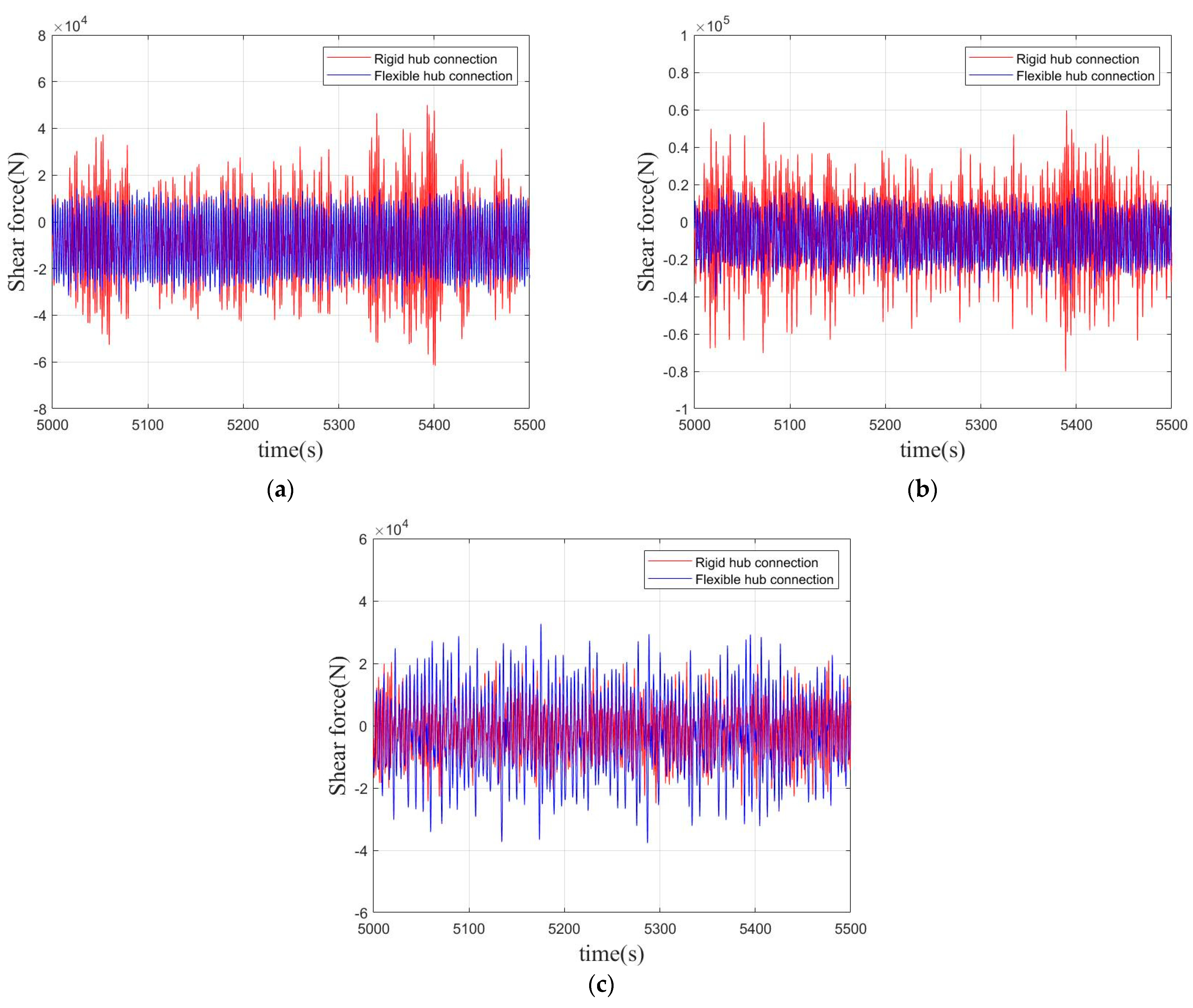
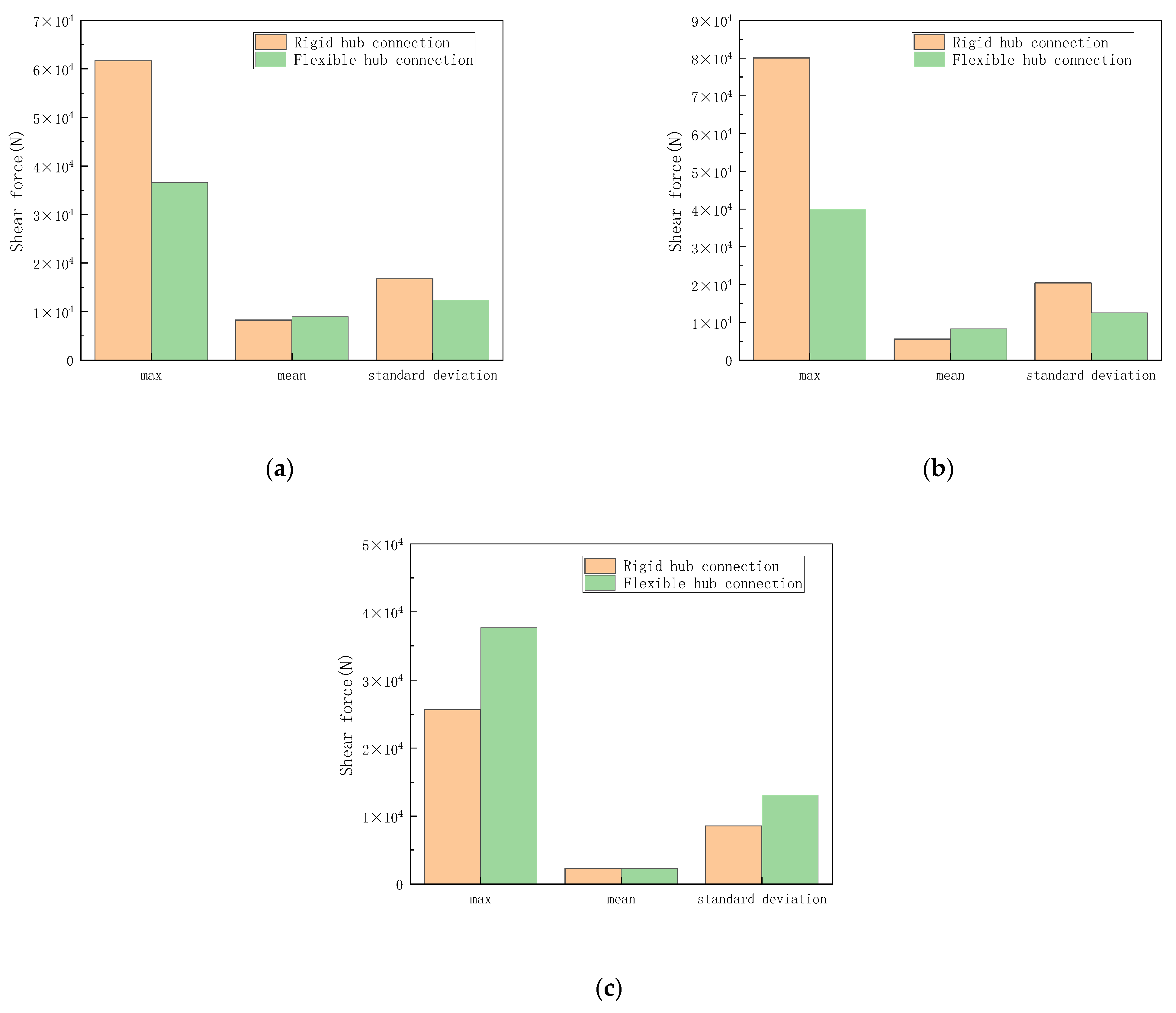
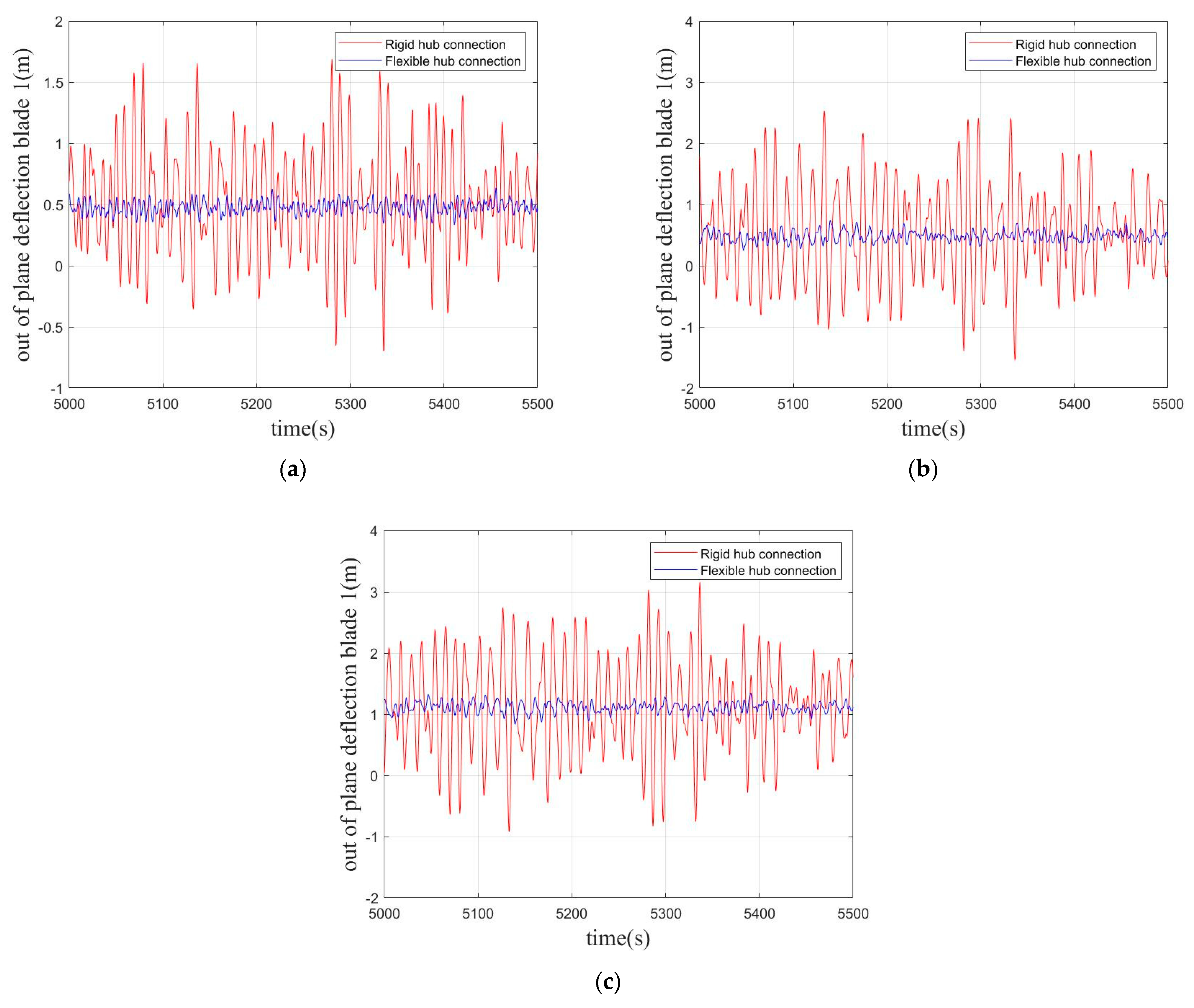
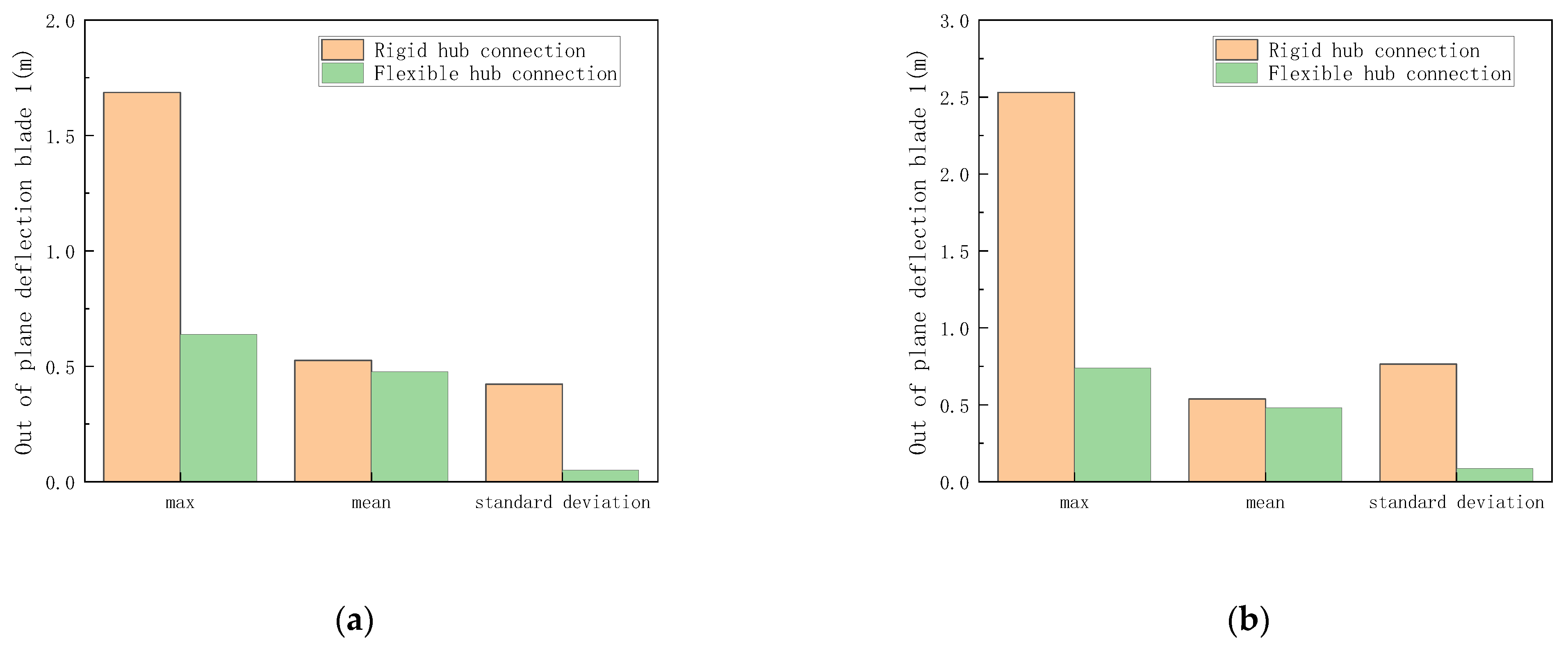
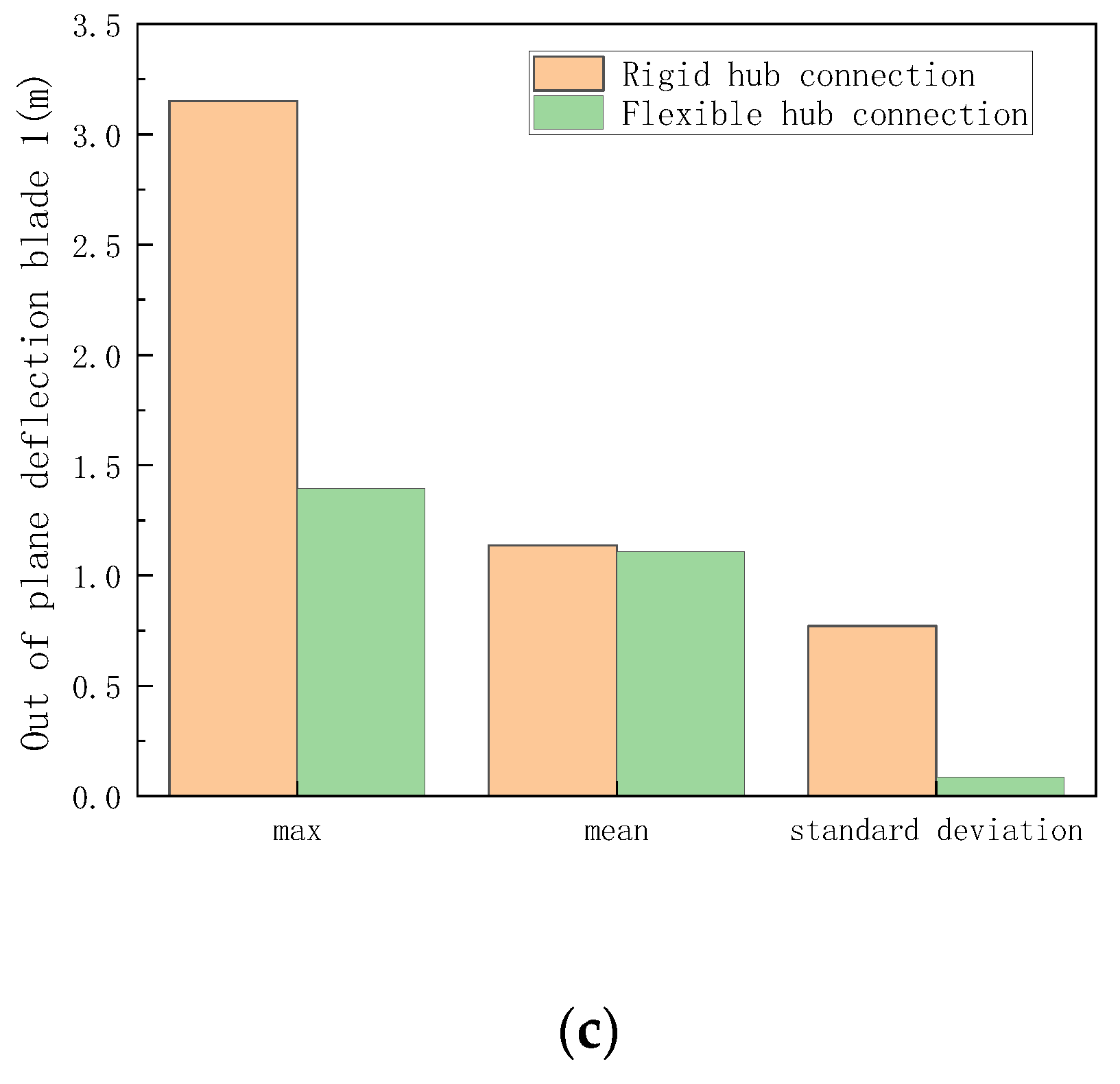
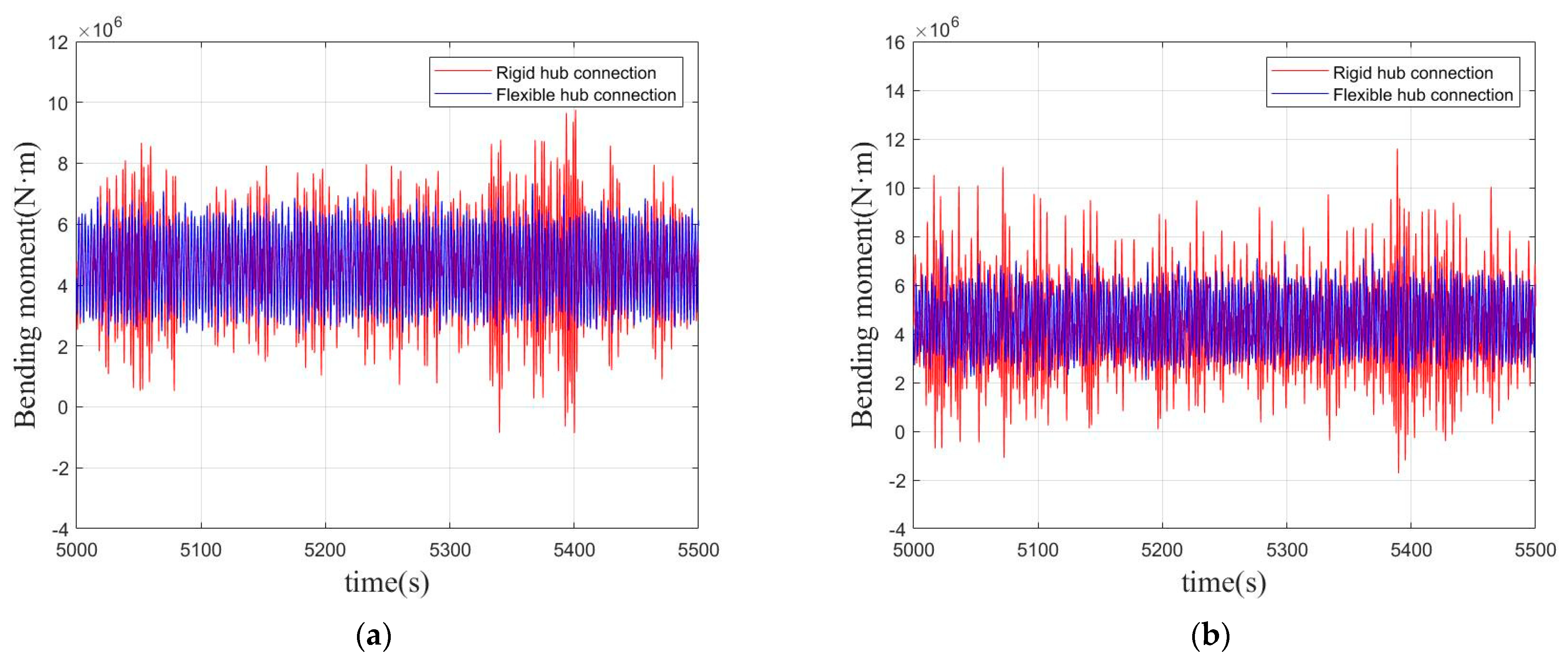
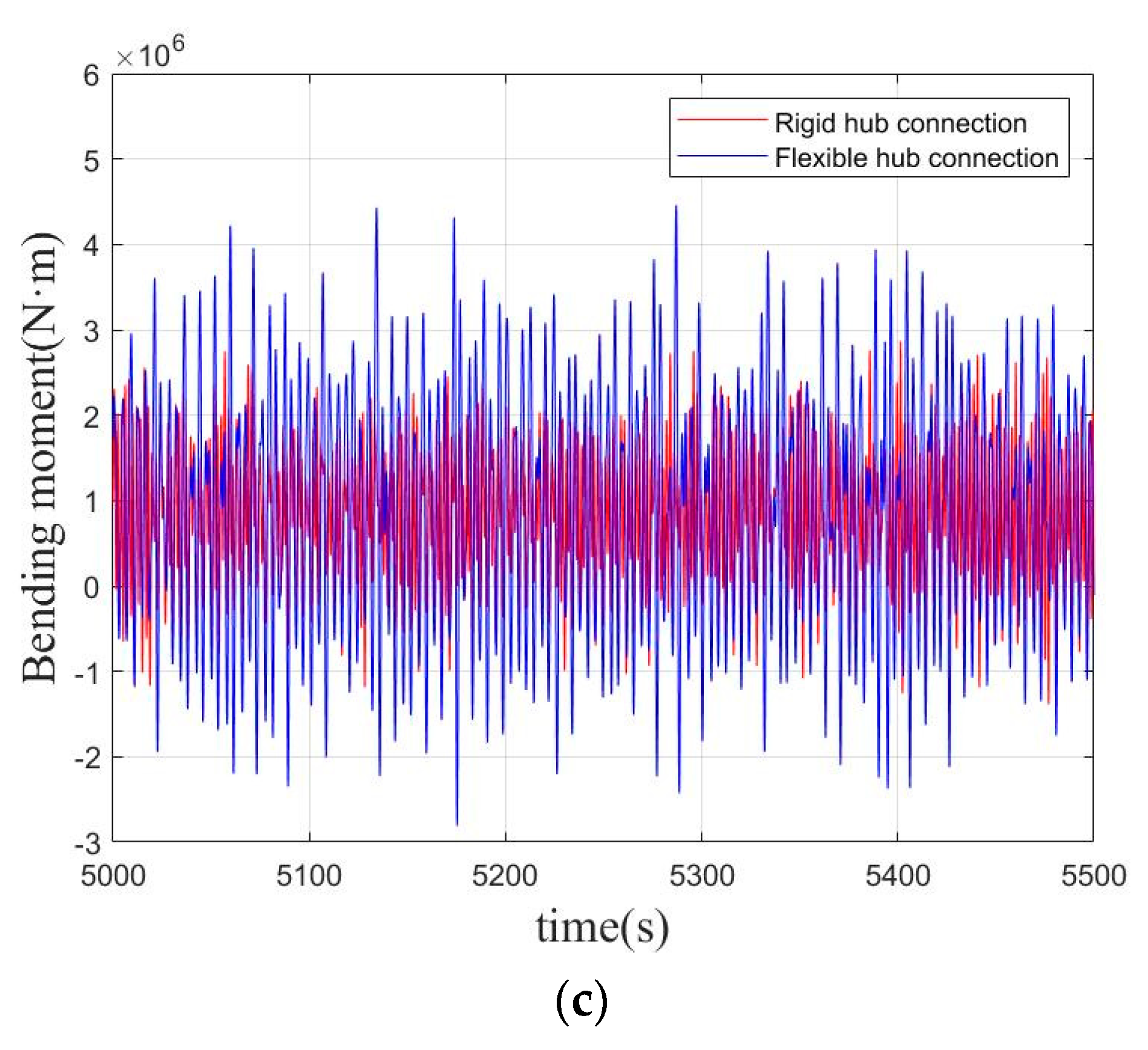
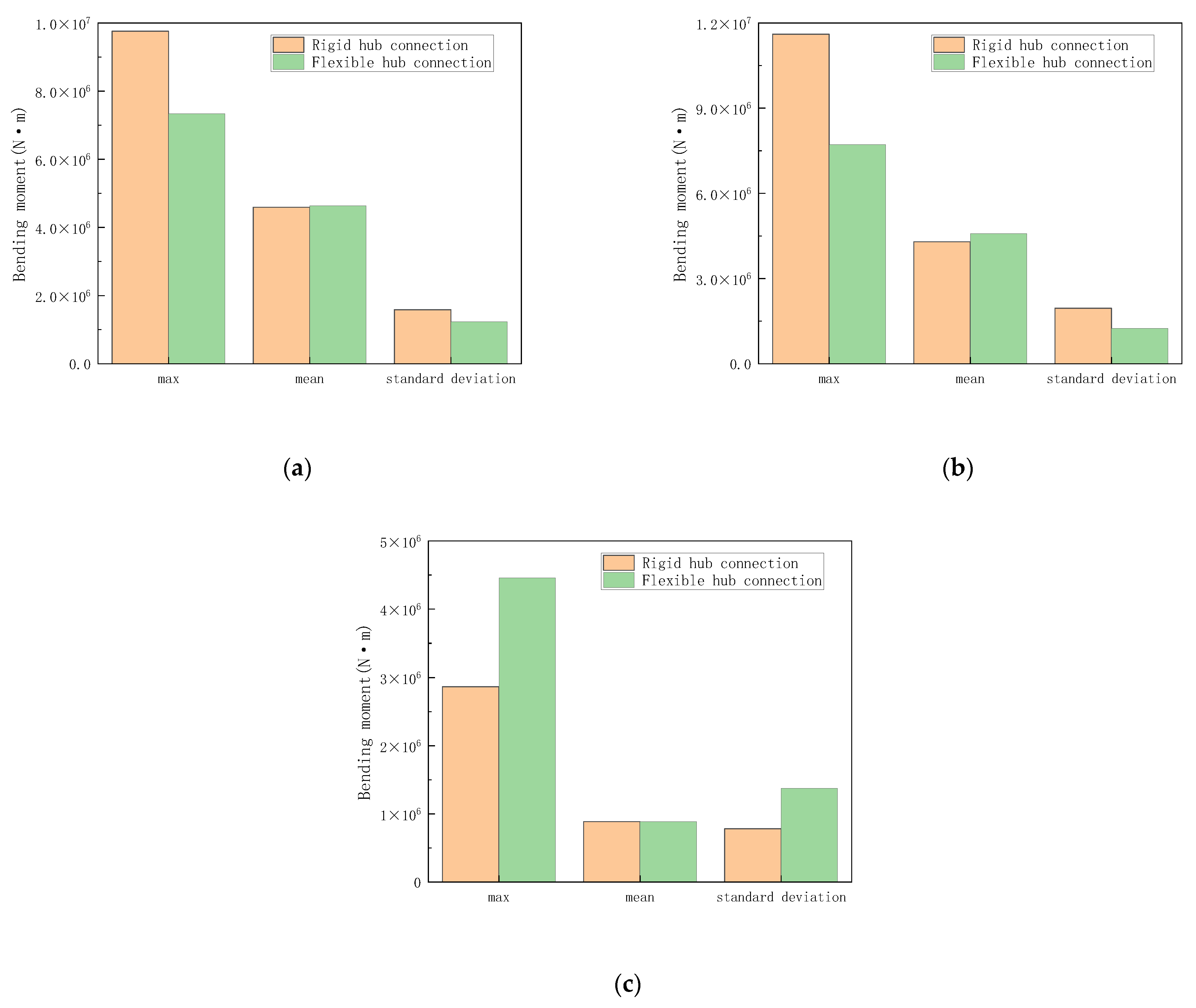
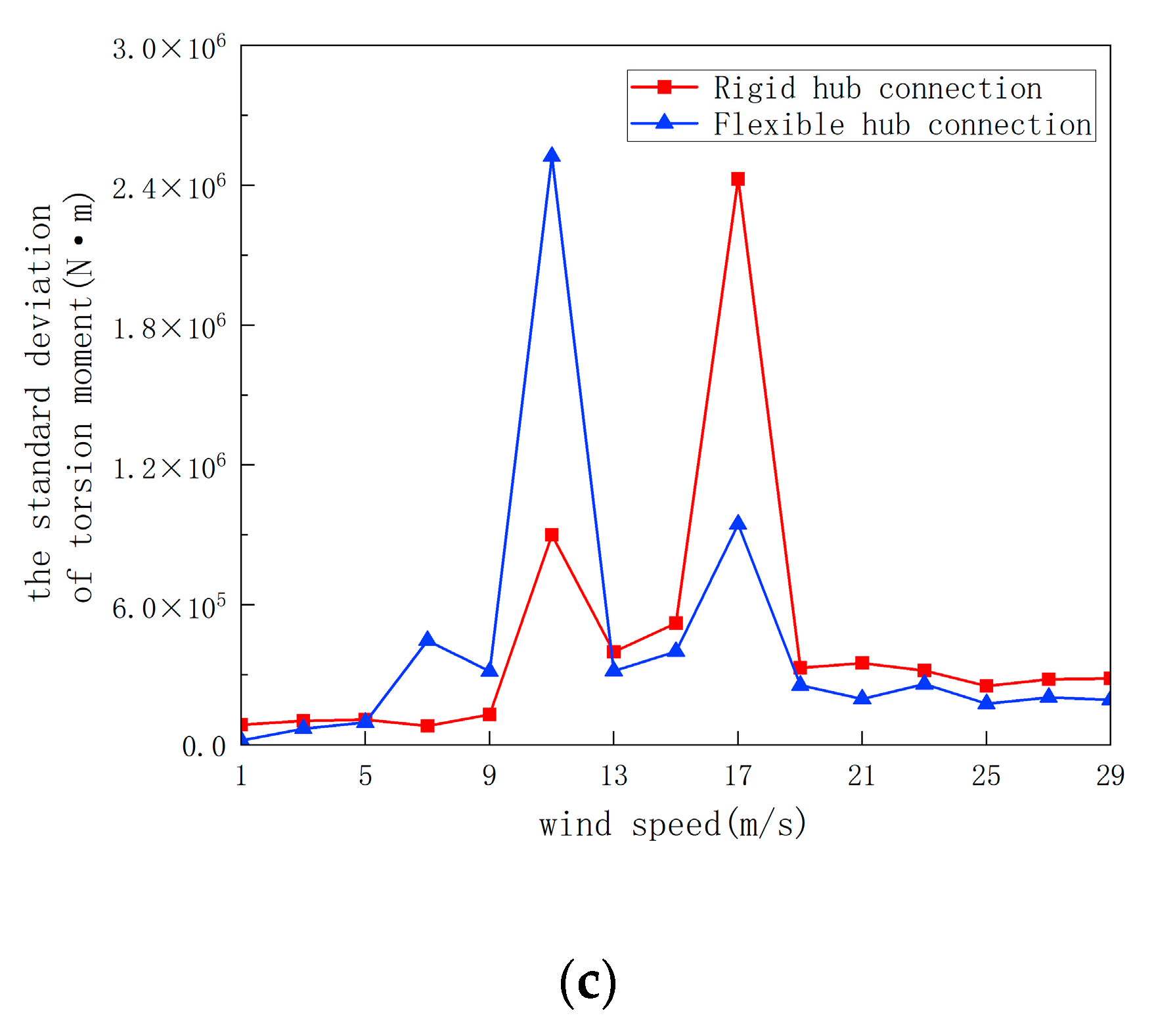
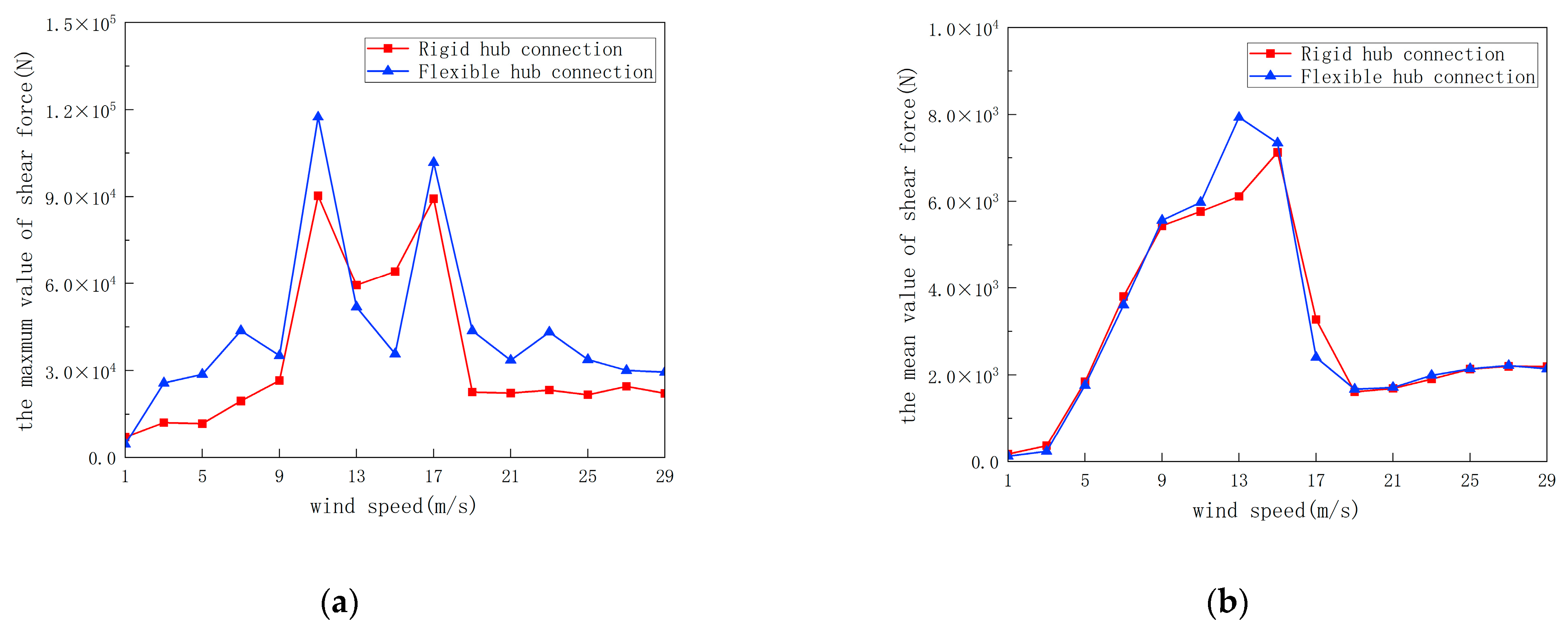
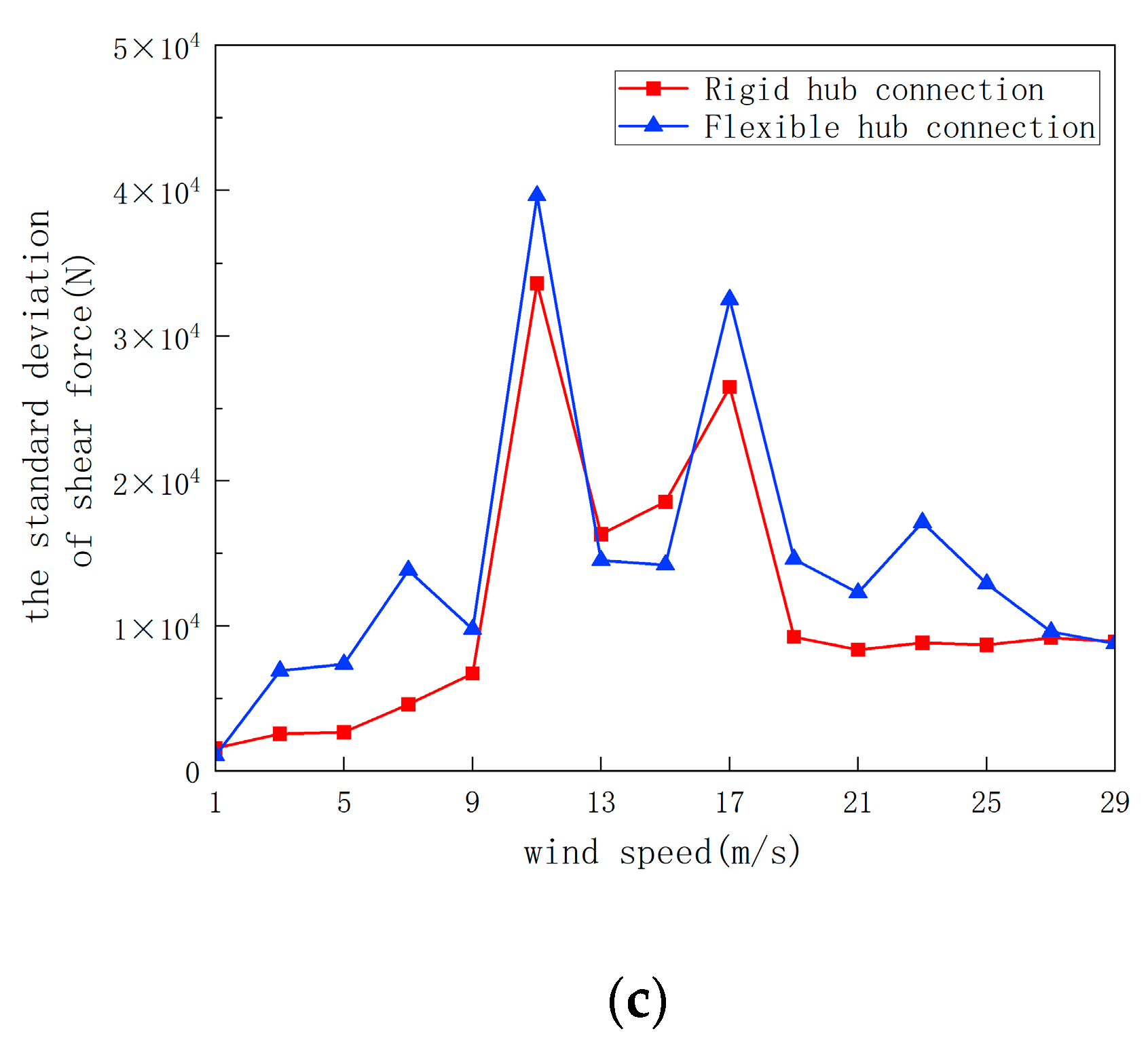
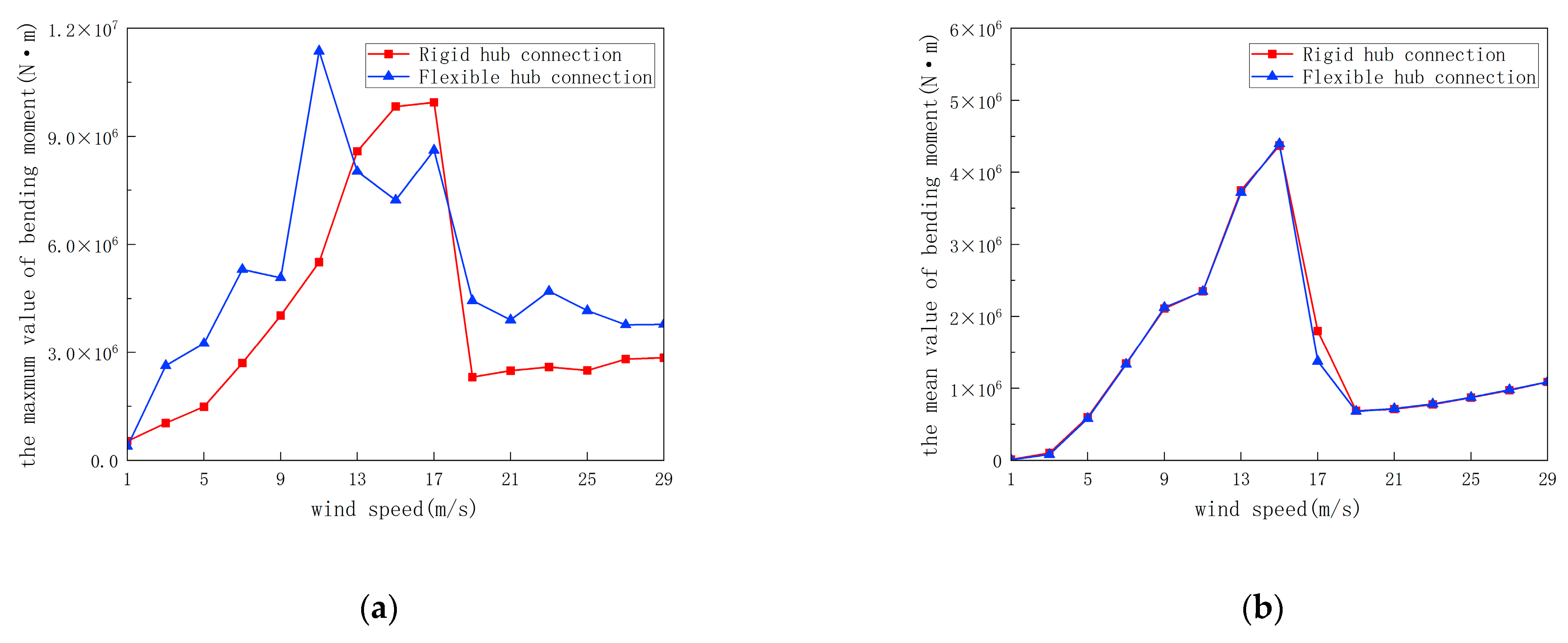
4.1. Analysis of Dynamic Structural Response
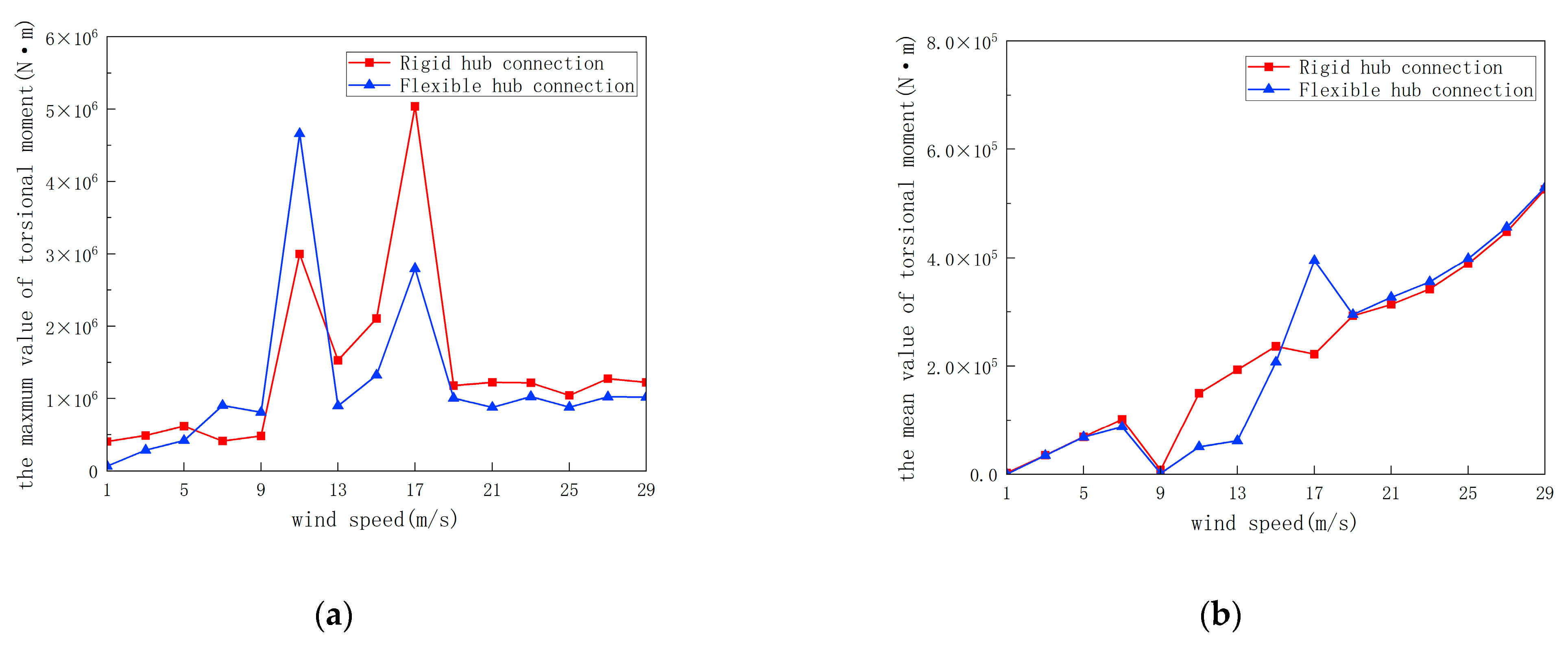
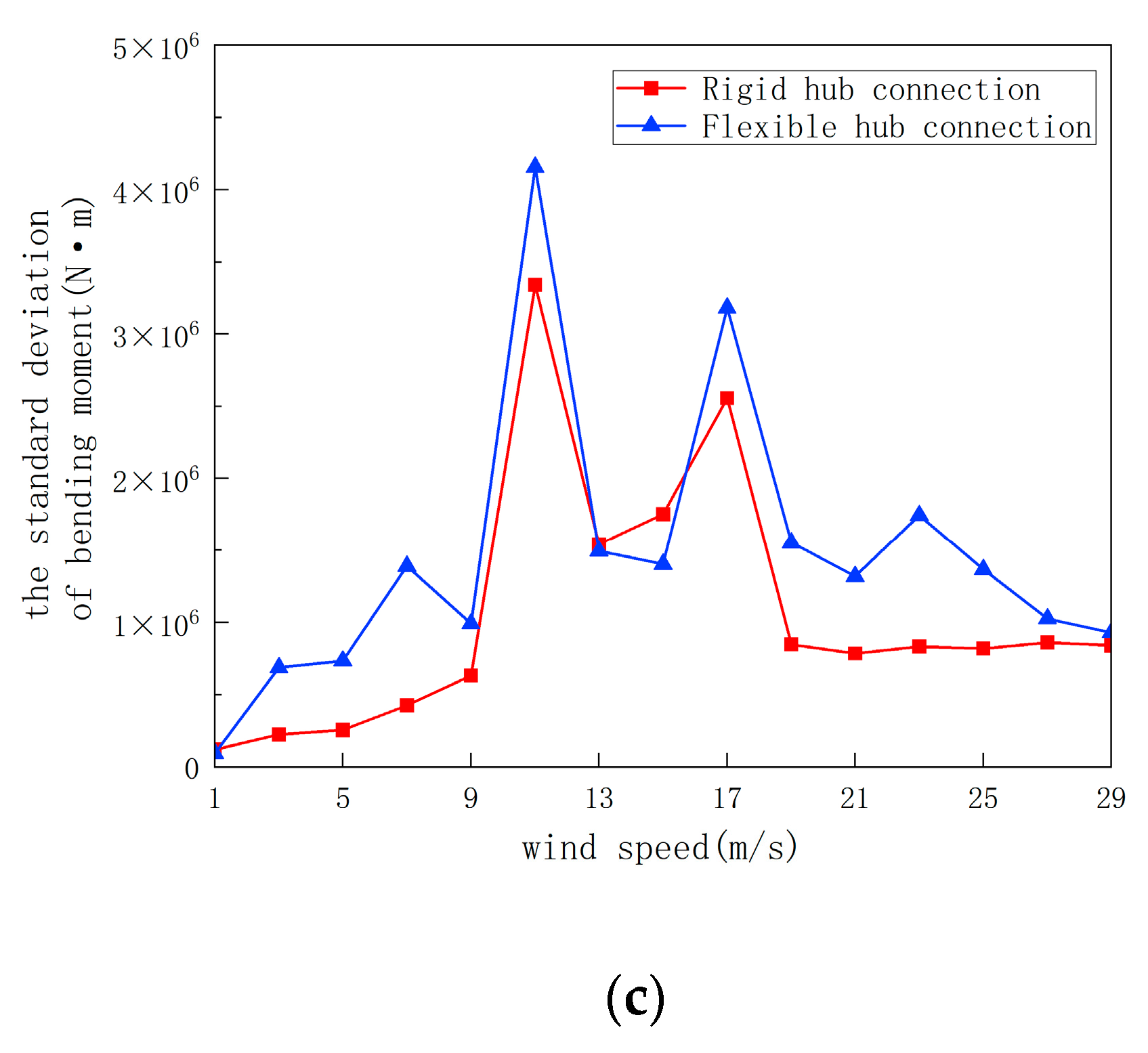
4.2. Sensitivity Analysis of Wind Speed on Tower Responses
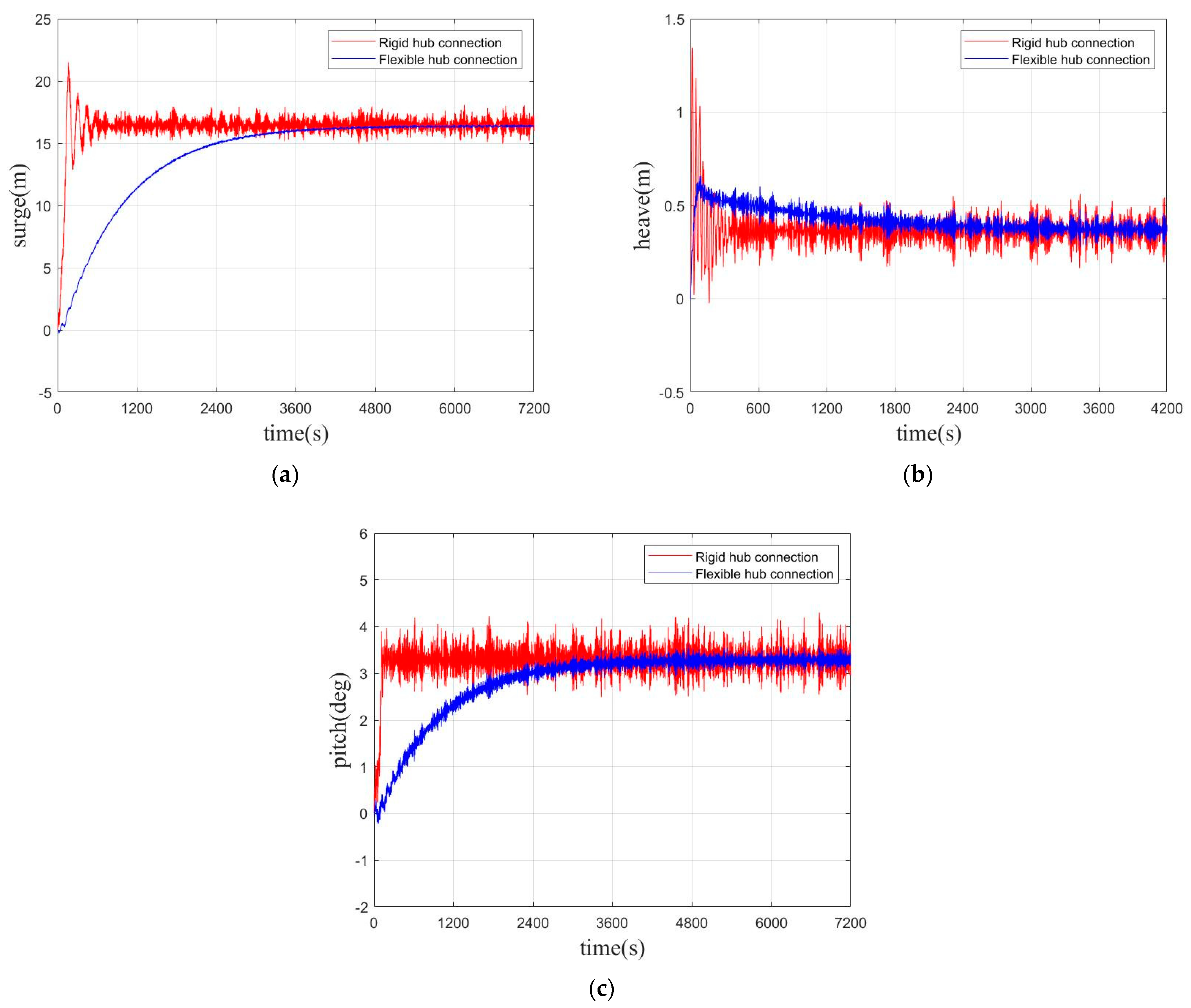
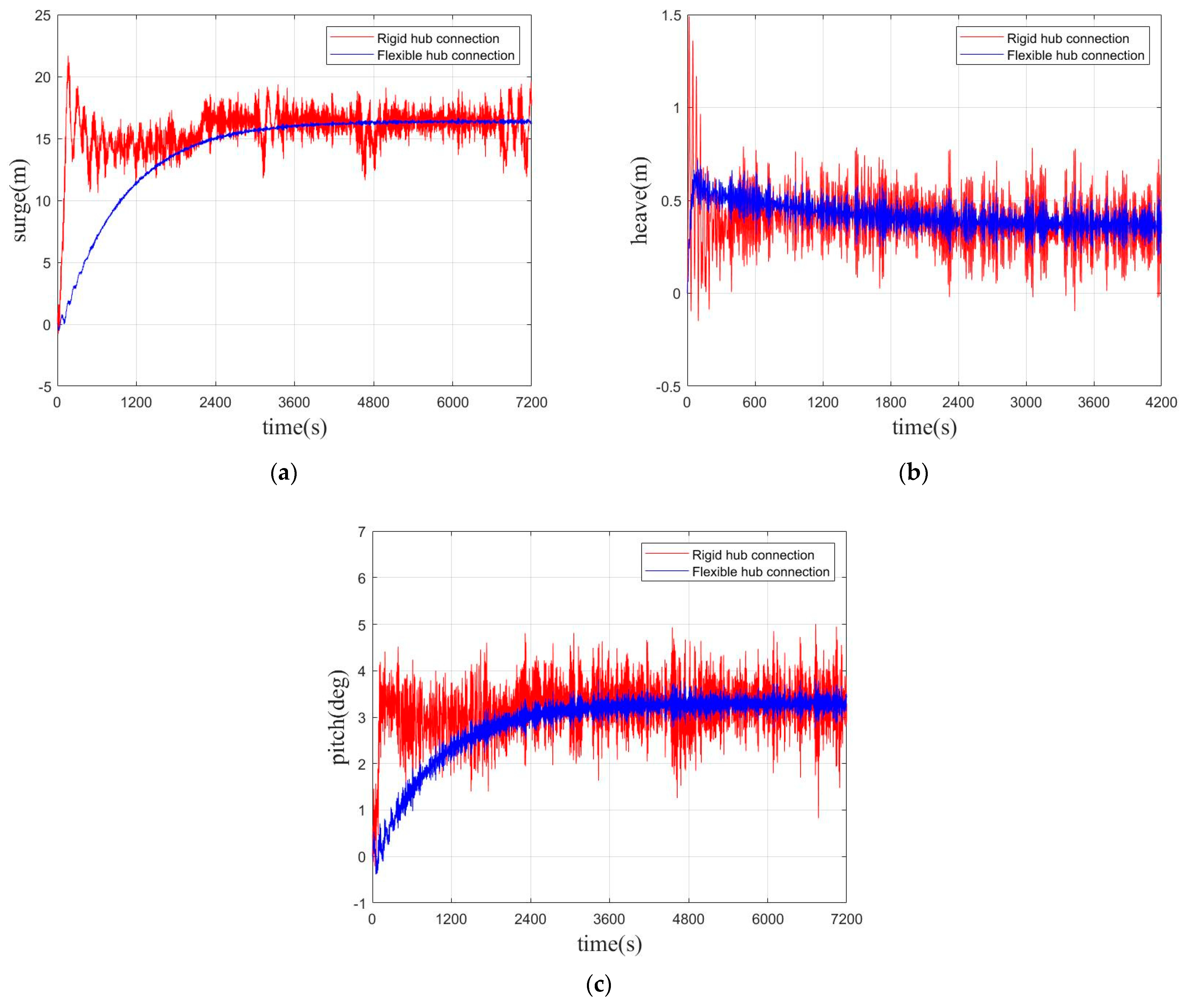
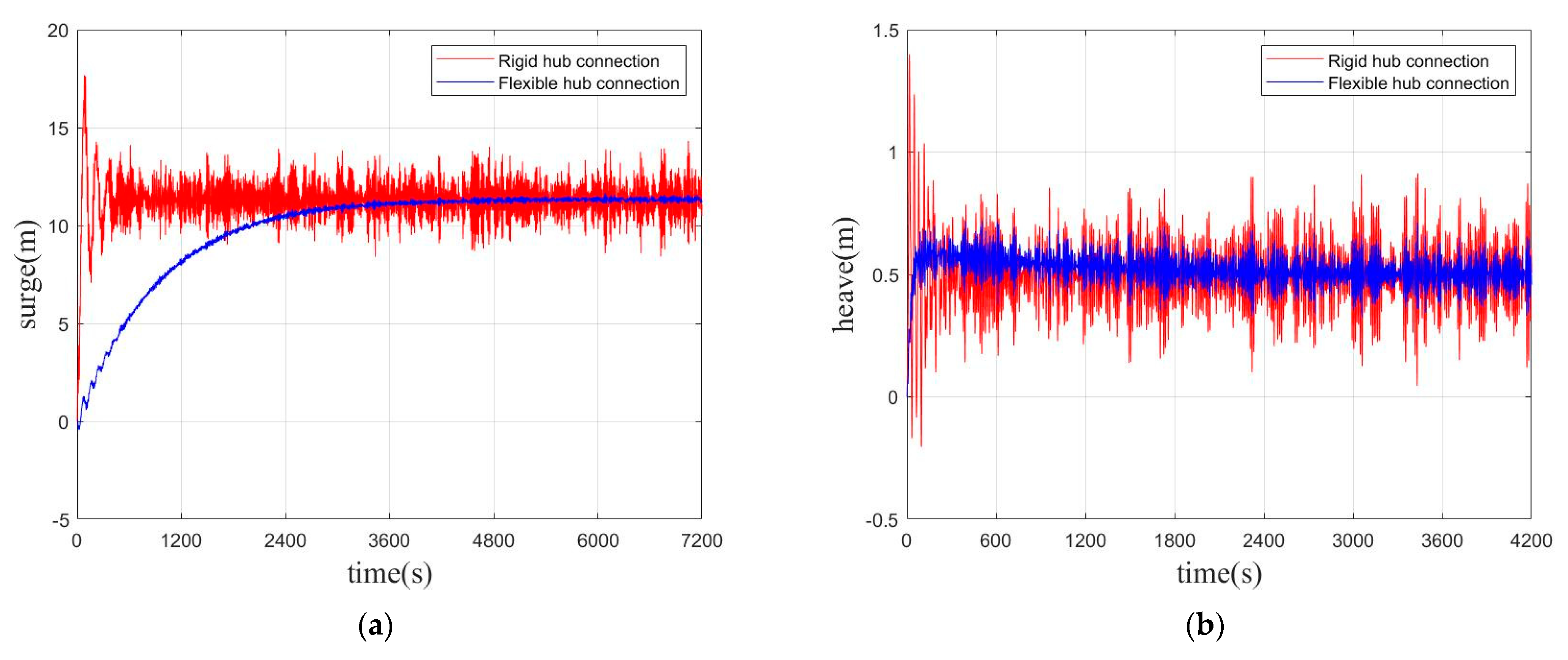
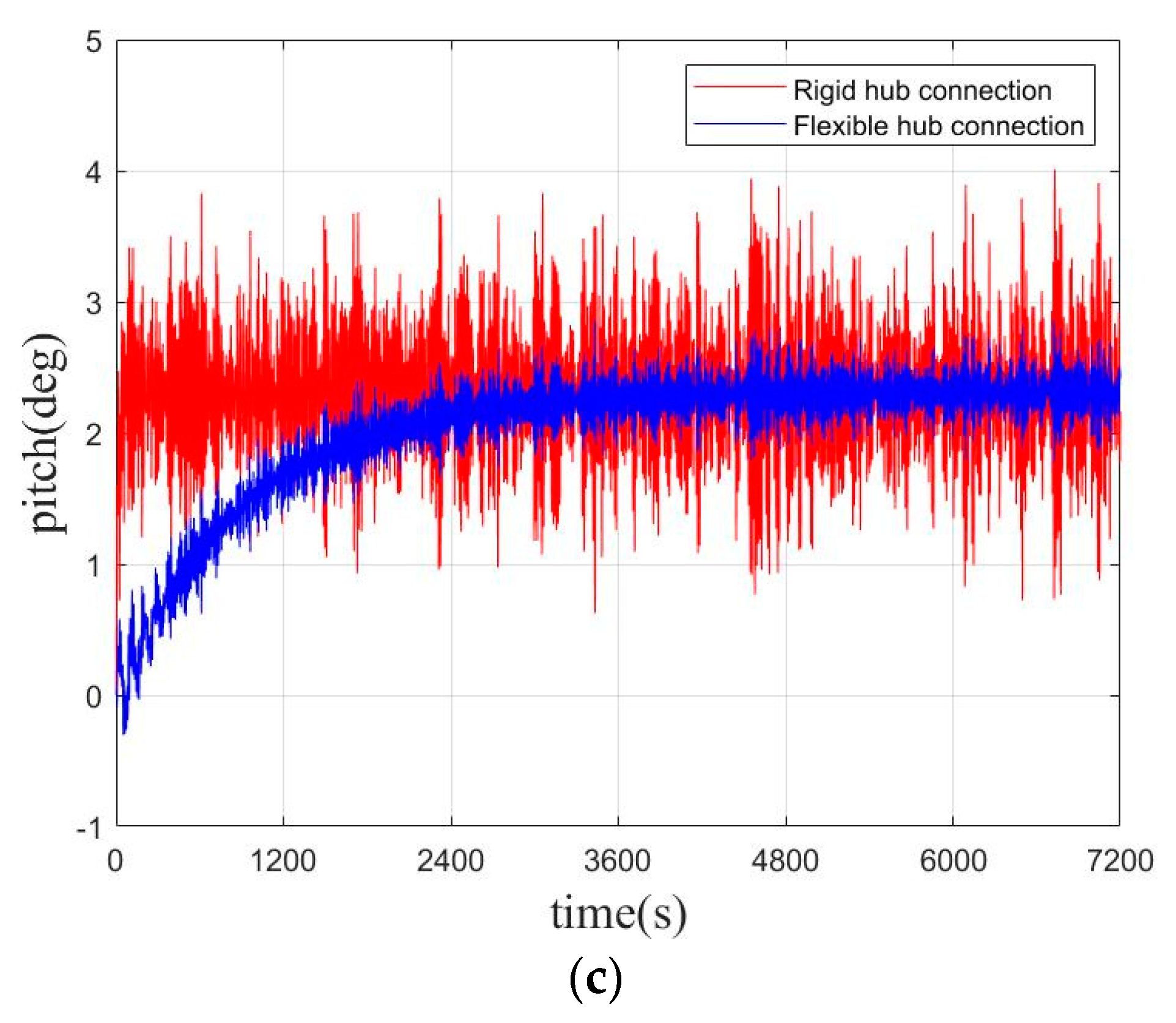
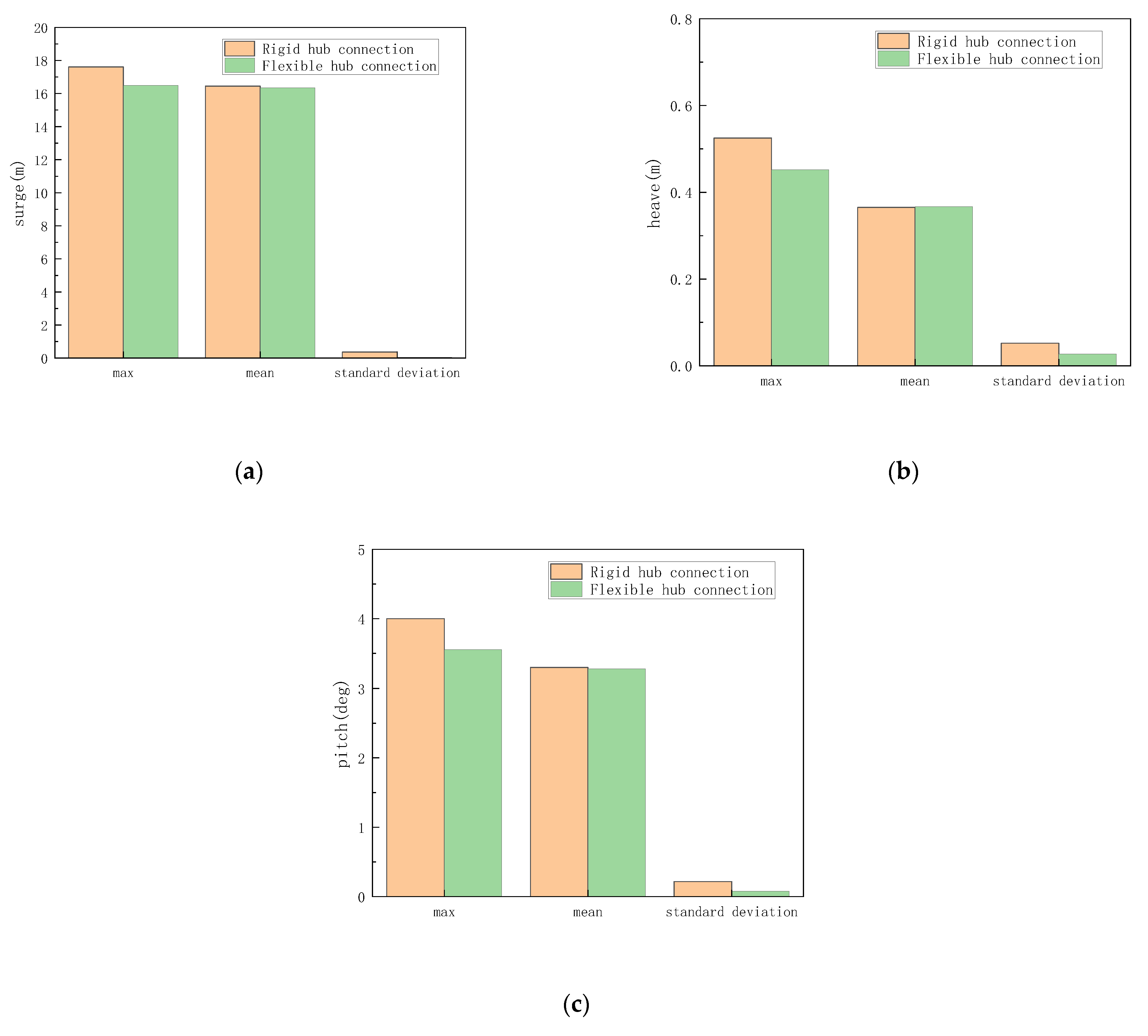
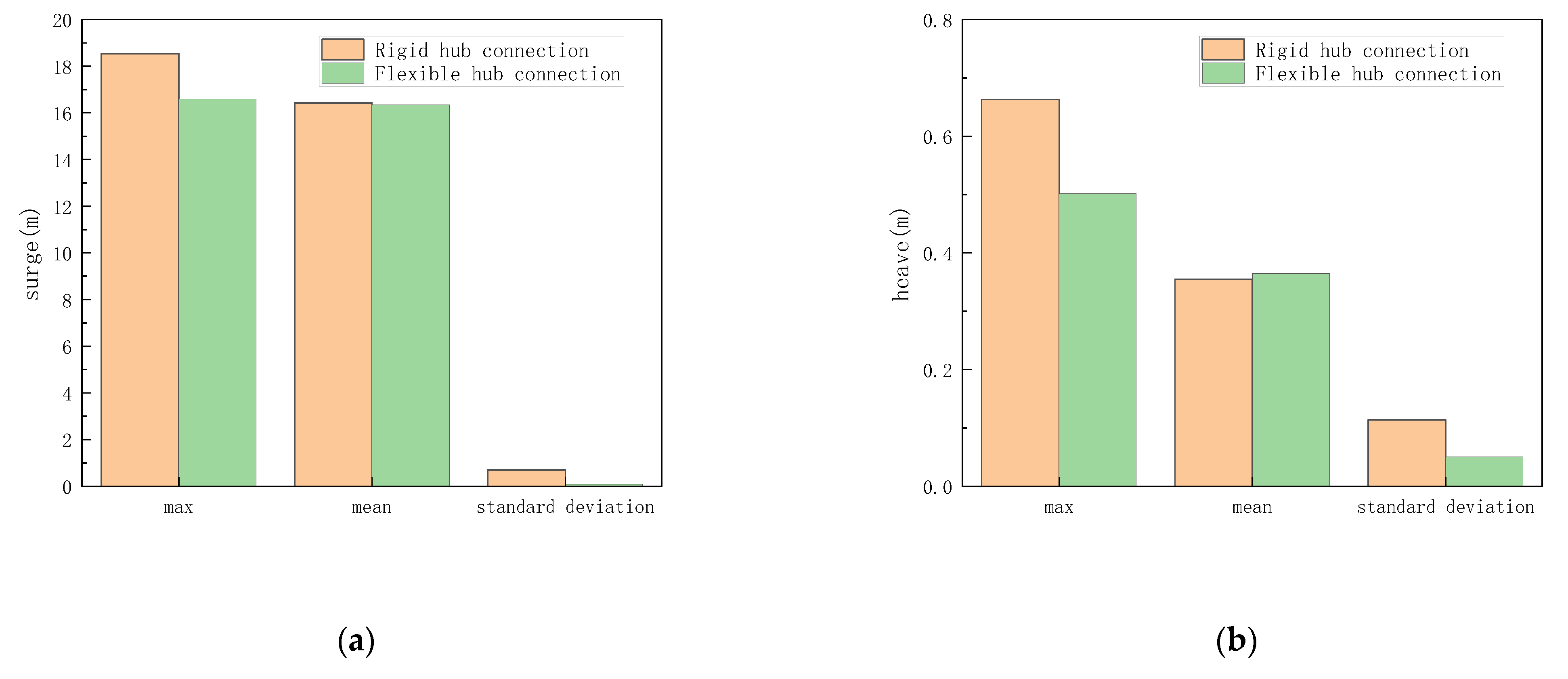
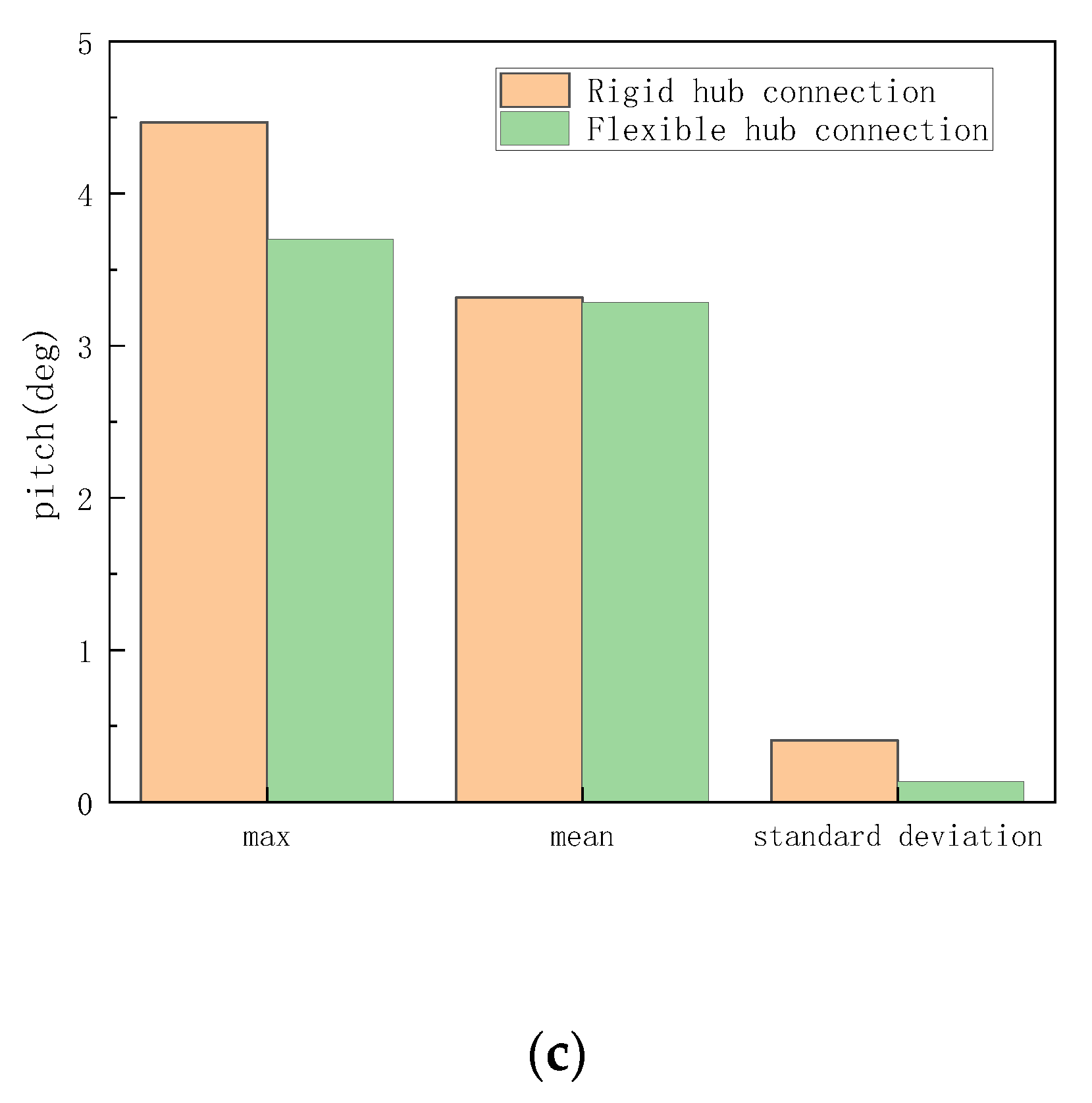
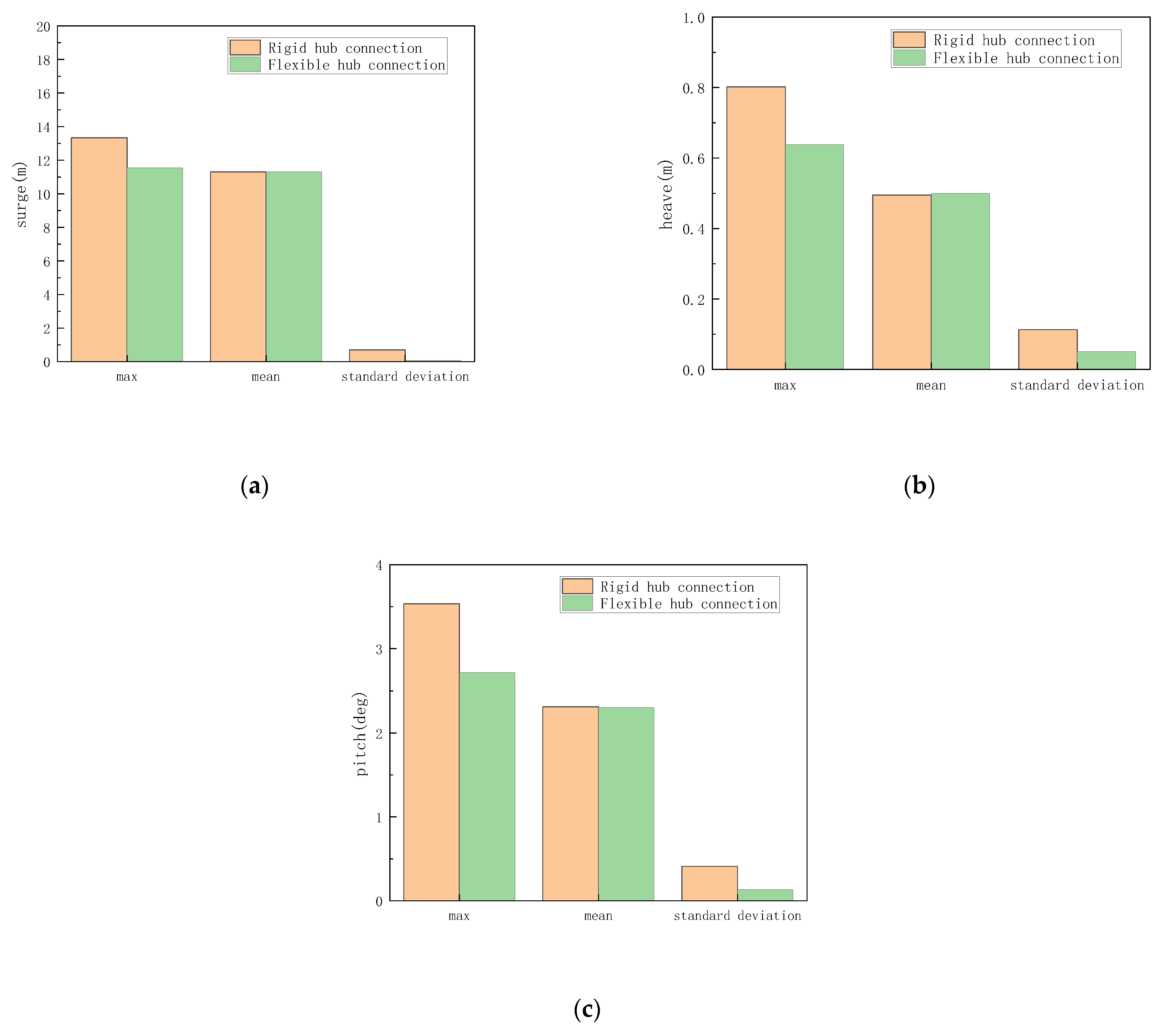
4.3. Dynamic Response Analysis of the Floater Motion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Leung, D.Y.C.; Yang, Y. Wind energy development and its environmental impact: A review. Renew. Sustain. Energy Rev. 2012, 16, 1031–1039. [Google Scholar] [CrossRef]
- Tüfekci, M.; Genel, O.E.; Tatar, A. Dynamic Analysis of Composite Wind Turbine Blades as Beams: An Analytical and Numerical Study. Vibration 2020, 4, 1–15. [Google Scholar] [CrossRef]
- Meng, H.; Jin, D.; Li, L. Analytical and numerical study on centrifugal stiffening effect for large rotating wind turbine blade based on NREL 5 MW and WindPACT 1.5 MW models. Renew. Energy 2022, 183, 321–329. [Google Scholar] [CrossRef]
- Kim, C.; Dinh, M.C.; Sung, H. Design, Implementation, and Evaluation of an Output Prediction Model of the 10 MW Floating Offshore Wind Turbine for a Digital Twin. Energies 2022, 15, 6329. [Google Scholar] [CrossRef]
- Esteban, M.D.; Diez, J.J.; López, J.S. Why offshore wind energy? Renew. Energy 2011, 36, 444–450. [Google Scholar] [CrossRef]
- Jiang, Z. Installation of offshore wind turbines: A technical review. Renew. Sustain. Energy Rev. 2021, 139, 110576. [Google Scholar] [CrossRef]
- Wu, X.; Hu, Y.; Li, Y.; Yang, J.; Duan, L.; Wang, T.; Adcock, T.; Jiang, Z.; Gao, Z.; Lin, Z. Foundations of offshore wind turbines: A review. Renew. Sustain. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef]
- Breton, S.P.; Moe, G. Status, plans and technologies for offshore wind turbines in Europe and North America. Renew. Energy 2009, 34, 646–654. [Google Scholar] [CrossRef]
- Asim, T.; Islam, S.Z.; Hemmati, A.; Khalid, M.S.U. A review of recent advancements in offshore wind turbine technology. Energies 2022, 15, 579. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, X.; Li, J. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Sun, X.; Huang, D.; Wu, G. The current state of offshore wind energy technology development. Energy 2012, 41, 298–312. [Google Scholar] [CrossRef]
- Kaldellis, J.K.; Kapsali, M. Shifting towards offshore wind energy—Recent activity and future development. Energy Policy 2013, 53, 136–148. [Google Scholar] [CrossRef]
- Arshad, M.; O’Kelly, B.C. Offshore wind-turbine structures: A review. Proc. Inst. Civ. Eng.-Energy 2013, 166, 139–152. [Google Scholar] [CrossRef]
- Ren, Z.; Verma, A.S.; Li, Y.; Teuwen, J.J.; Jiang, Z. Offshore wind turbine operations and maintenance: A state-of-the-art review. Renew. Sustain. Energy Rev. 2021, 144, 110886. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Lian, J. Review of integrated installation technologies for offshore wind turbines: Current progress and future development trends. Energy Convers. Manag. 2022, 255, 115319. [Google Scholar] [CrossRef]
- Koh, J.H.; Ng, E.Y.K. Downwind offshore wind turbines: Opportunities, trends and technical challenge. Renew Sustain. Energy Rev. 2016, 54, 797–808. [Google Scholar] [CrossRef]
- Islam, M.R.; Guo, Y.; Zhu, J. A review of offshore wind turbine nacelle: Technical challenges, and research and developmental trends. Renew Sustain. Energy Rev. 2014, 33, 161–176. [Google Scholar] [CrossRef]
- Carroll, J.; McDonald, A.; McMillan, D. Failure rate, repair time and unscheduled O&M cost analysis of offshore wind turbines. Wind Energy 2016, 19, 1107–1119. [Google Scholar]
- Li, H.; Soares, C.G. Assessment of failure rates and reliability of floating offshore wind turbines. Reliab. Eng. Syst. Saf. 2022, 228, 108777. [Google Scholar] [CrossRef]
- Jung, C.; Schindler, D. The properties of the global offshore wind turbine fleet. Renew. Sustain. Energy Rev. 2023, 186, 113667. [Google Scholar] [CrossRef]
- Blasques, J.P.; Bitsche, R.D.; Fedorov, V. Accuracy of an efficient framework for structural analysis of wind turbine blades. Wind Energy 2016, 19, 1603–1621. [Google Scholar] [CrossRef]
- Çiftci, C.; Erdoğan, A.; Genç, M.S. Investigation of the mechanical behavior of a new generation wind turbine blade technology. Energies 2023, 16, 1961. [Google Scholar] [CrossRef]
- Luhmann, B.; Seyedin, H.; Cheng, P.W. Aero-structural dynamics of a flexible hub connection for load reduction on two-bladed wind turbines. Wind Energy 2017, 20, 521–535. [Google Scholar] [CrossRef]
- Li, G.; Dai, J.; Zhang, F. New Two-BWT Blade Aerodynamic Design and CFD Simulation. Machines 2023, 11, 399. [Google Scholar] [CrossRef]
- Hayat, I.; Chatterjee, T.; Liu, H. Exploring wind farms with alternating two-and three-bladed wind turbines. Renew. Energy 2019, 138, 764–774. [Google Scholar] [CrossRef]
- Rinaldi, G.; Thies, P.R.; Johanning, L. Current status and future trends in the operation and maintenance of offshore wind turbines: A review. Energies 2021, 14, 2484. [Google Scholar] [CrossRef]
- Wenehenubun, F.; Saputra, A.; Sutanto, H. An experimental study on the performance of Savonius wind turbines related with the number of blades. Energy Procedia 2015, 68, 297–304. [Google Scholar] [CrossRef]
- Chetan, M.; Yao, S.; Griffith, D.T. Flutter Behavior of Highly Flexible Two- and Three-bladed Wind Turbine Rotors. Wind Energy Sci. Discuss. 2021, 2021, 1–29. [Google Scholar]
- Adeyeye, K.A.; Ijumba, N.; Colton, J. The Effect of the Number of Blades on the Efficiency of a Wind Turbine. IOP Conf. Ser. Earth Environ. Sci. 2021, 801, 012020. [Google Scholar] [CrossRef]
- Van Solingen, E.; van Wingerden, J.W. Linear individual pitch control design for two-bladed wind turbines. Wind Energy 2015, 18, 677–697. [Google Scholar] [CrossRef]
- Li, X.; Huang, S.; Sheng, C. Numerical investigation of structural responses for three-bladed and two-bladed offshore wind turbines. Rev. Ibérica Sist. E Tecnol. Informação 2016, 10, 27–41. [Google Scholar]
- Bhattacharya, S. Challenges in design of foundations for offshore wind turbines. Eng. Technol. Ref. 2014, 1, 922. [Google Scholar] [CrossRef]
- Ikeda, T.; Harata, Y.; Ishida, Y. Parametric instability and localization of vibrations in three-blade wind turbines. J. Comput. Nonlin. Dyn. 2018, 13, 071001. [Google Scholar] [CrossRef]
- Eroglu, U.; Tufekci, E. Small-Amplitude free vibrations of straight beams subjected to large displacements and rotation. Appl. Math. Model. 2018, 53, 223–241. [Google Scholar] [CrossRef]
- Tüfekci, M. Performance evaluation analysis of Ti-6Al-4V foam fan blades in aircraft engines: A numerical study. Compos. Part C Open Access 2023, 12, 100414. [Google Scholar] [CrossRef]
- Mohammadi, E.; Fadaeinedjad, R.; Moschopoulos, G. Investigation of power quality and structural loads for two-bladed wind turbines with rigid and teetered rotors using a wind turbine emulator. IET Electr. Power Appl. 2020, 14, 2707–2716. [Google Scholar] [CrossRef]
- Klein, L.; Luhmann, B.; Rösch, K.N. CFD simulation of a 2 bladed multi megawatt wind turbine with flexible rotor connection. J. Phys. Conf. Ser. 2016, 753, 022010. [Google Scholar] [CrossRef]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: New York, NY, USA, 1993; pp. 37–68. [Google Scholar]
- Schorbach, V.; Dalhoff, P.; Gust, P. Teeter design for lowest extreme loads during end impacts. Wind Energy 2018, 21, 1–14. [Google Scholar] [CrossRef]
- Jin, C. Comparison of Potential Theory and Morison Equation for Deformable Horizontal Cylinders. Sustain. Mar. Struct. 2022, 4, 1–10. [Google Scholar] [CrossRef]
- Orcina, L. OrcaFlex User Manual Version 11.0 B.; Orcina: Ulverston, UK, 2016. [Google Scholar]
- Bakti, F.P.; Jin, C.; Kim, M.H. Practical approach of linear hydro-elasticity effect on vessel with forward speed in the frequency domain. J. Fluids Struct. 2021, 101, 103204. [Google Scholar] [CrossRef]
- DET NORSKE VERITAS. Sesam User Manual; DET NORSKE VERITAS: Høvik, Norway, 2017; p. 59. [Google Scholar]
- Jonkman, J.M.; Butterfield, S.; Musial, W. Definition of a 5MW Reference Wind Turbine for Offshore System Development; Office of Scientific & Technical Information Technical Reports; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 2009.
- Jonkman, J.; Musial, W. Subtask 2 the Offshore Code Comparison Collaboration (OC3) IEA Wind Task 23 Offshore Wind Technology and Deployment; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Luhmann, B.; Cheng, P.W. Fatigue and extreme load reduction on two-bladed wind turbines using the flexible hub connection. Wind Energy 2020, 23, 1–16. [Google Scholar] [CrossRef]
- Dong, W.; Moan, T.; Gao, Z. Long-term fatigue analysis of multi-planar tubular joints for jacket-type offshore wind turbine in time domain. Eng. Struct. 2011, 33, 2002–2014. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Unit | Value |
|---|---|---|
| Number of blades | - | 2 |
| Rotor Mass | Kg | 92,660 |
| Nacelle Mass | Kg | 240,000 |
| Tower Mass | kg | 249,718 |
| Description | Unit | Value |
|---|---|---|
| Depth to Platform Base Below SWL (Total Draft) | m | 120 |
| CM Location Below SWL Along Platform Centerline | m | (0, 0, −78.56) |
| Total mass (rotor, nacelle, tower, platform) | kg | 8,048,708 |
| Rotational StiffnessC [Nm/deg] | Rotational DampingD [Nms/deg] | Degree of Freedom | |
|---|---|---|---|
| spring element 1 | |||
| spring element 2 |
| Load Cases | |||
|---|---|---|---|
| LC1 | 3.66 | 9.7 | 15.6 |
| LC2 | 5.49 | 11.3 | 15.6 |
| LC3 | 5.49 | 11.3 | 25.0 |
| LC4 | 3.66 | 9.7 | 1.0 |
| LC5 | 3.66 | 9.7 | 3.0 |
| LC6 | 3.66 | 9.7 | 5.0 |
| LC7 | 3.66 | 9.7 | 7.0 |
| LC8 | 3.66 | 9.7 | 9.0 |
| LC9 | 3.66 | 9.7 | 11.0 |
| LC10 | 3.66 | 9.7 | 13.0 |
| LC11 | 3.66 | 9.7 | 15.0 |
| LC12 | 3.66 | 9.7 | 17.0 |
| LC13 | 3.66 | 9.7 | 19.0 |
| LC14 | 3.66 | 9.7 | 21.0 |
| LC15 | 3.66 | 9.7 | 23.0 |
| LC16 | 3.66 | 9.7 | 25.0 |
| LC17 | 3.66 | 9.7 | 27.0 |
| LC18 | 3.66 | 9.7 | 29.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Wang, K.; Jie, T.; Wu, X. Coupled Dynamic Characteristics of a Spar-Type Offshore Floating Two-Bladed Wind Turbine with a Flexible Hub Connection. J. Mar. Sci. Eng. 2024, 12, 547. https://doi.org/10.3390/jmse12040547
Wu Z, Wang K, Jie T, Wu X. Coupled Dynamic Characteristics of a Spar-Type Offshore Floating Two-Bladed Wind Turbine with a Flexible Hub Connection. Journal of Marine Science and Engineering. 2024; 12(4):547. https://doi.org/10.3390/jmse12040547
Chicago/Turabian StyleWu, Zonghao, Kai Wang, Tianyu Jie, and Xiaodi Wu. 2024. "Coupled Dynamic Characteristics of a Spar-Type Offshore Floating Two-Bladed Wind Turbine with a Flexible Hub Connection" Journal of Marine Science and Engineering 12, no. 4: 547. https://doi.org/10.3390/jmse12040547
APA StyleWu, Z., Wang, K., Jie, T., & Wu, X. (2024). Coupled Dynamic Characteristics of a Spar-Type Offshore Floating Two-Bladed Wind Turbine with a Flexible Hub Connection. Journal of Marine Science and Engineering, 12(4), 547. https://doi.org/10.3390/jmse12040547