
Grid-Impedance-Based Transient Current Control for Offshore Wind Turbines under Low-Voltage Fault


Abstract
:1. Introduction
- (1)
- This paper explores the DC-link overvoltage trajectory with different grid voltage dip conditions and proposes a solution by utilizing GSC’s short-time overcurrent capacity and chopper.
- (2)
- To provide accurate guidance for transient current control, the feasible current region is proposed through visualization of GSC capacity, pre-fault power ability, LVRT requirement and synchronization stability.
- (3)
- A grid-impedance-based transient current control is utilized to enhance the LVRT performance of OWTs and mitigate power oscillations under different voltage dip and grid impedance conditions.
2. Problem Description and Analysis
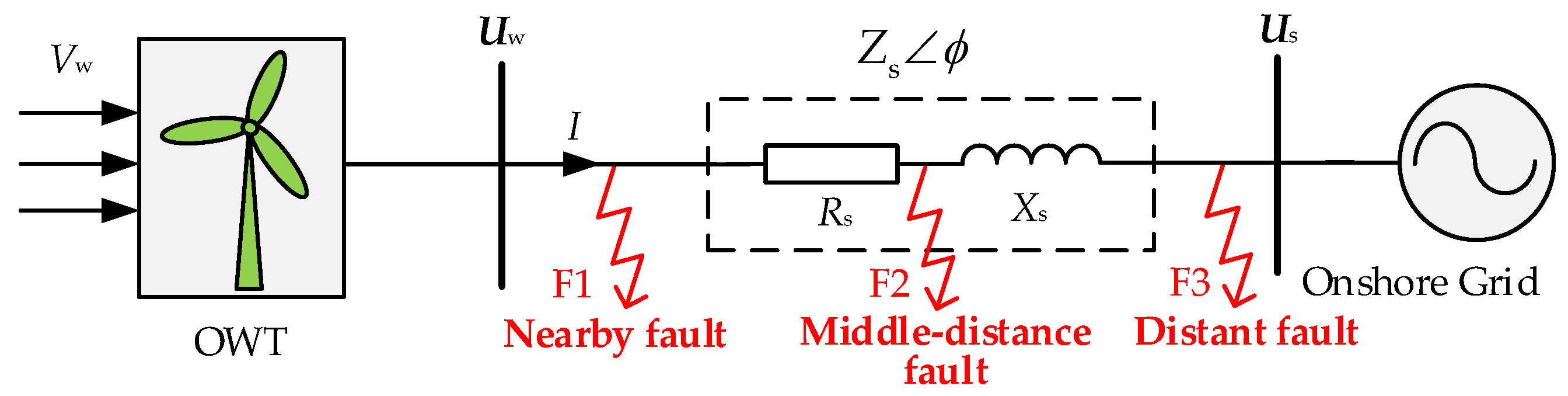
2.1. System Description
2.2. LVRT Requirement and Control Method
2.3. DC-Link Overvoltage during Fault
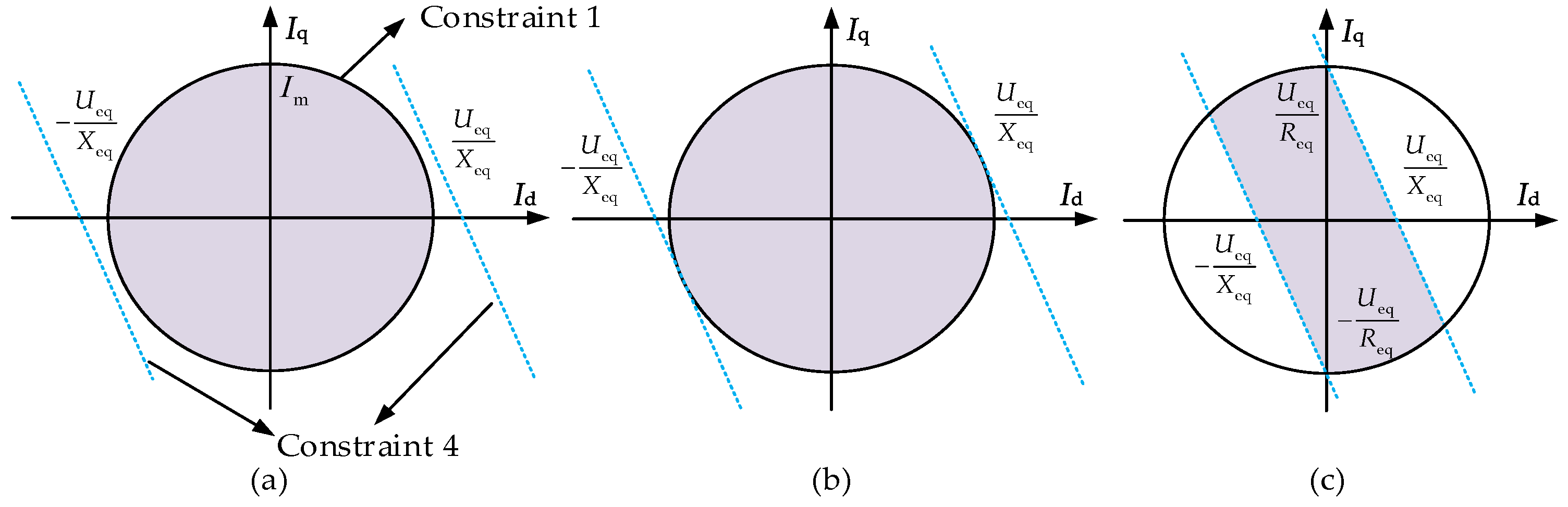
3. Feasible Current Region of GSC
- (1)
- Constraint 1: GSC capacity.
- (2)
- Constraint 2: pre-fault power ability.
- (3)
- Constraint 3: LVRT requirement.
- (4)
- Constraint 4: synchronization stability.
4. Grid-Impedance-Based Transient Current Control
- (1)
- Situation (a): Ueq ≥ Xeq·Im
- (2)
- Situation (b): Req·Im ≤ Ueq ≤ Xeq·Im
- (3)
- Situation (c): Ueq ≤ Req·Im
- (1)
- Identifying onshore grid fault and collecting fault parameters, i.e., faulty point, faulty degree, onshore gird impedance, voltage, active/reactive current of the OWT.
- (2)
- Judging the operation status of the OWT according to Uw. If 0.9 ≤ Uw ≤ 1.0, the OWT adopts steady control mode of active current priority. If 0.2 ≤ Uw ≤ 0.9, the OWT adopts LVRT control mode of reactive current priority. Otherwise, the OWT is off-grid due to the deep voltage drop.
- (3)
- Calculating the equivalent grid impedance and equivalent grid voltage Ueq.
- (4)
- Calculating active current and reactive current of GSC according to the three situations in Figure 10.
- (5)
- Sending control signals to GSC. As indicated, by employing the proposed method during low-voltage fault, the proper current reference is obtained to support onshore grid voltage and ensure synchronization stability.
5. Simulation Results
5.1. System Parameters
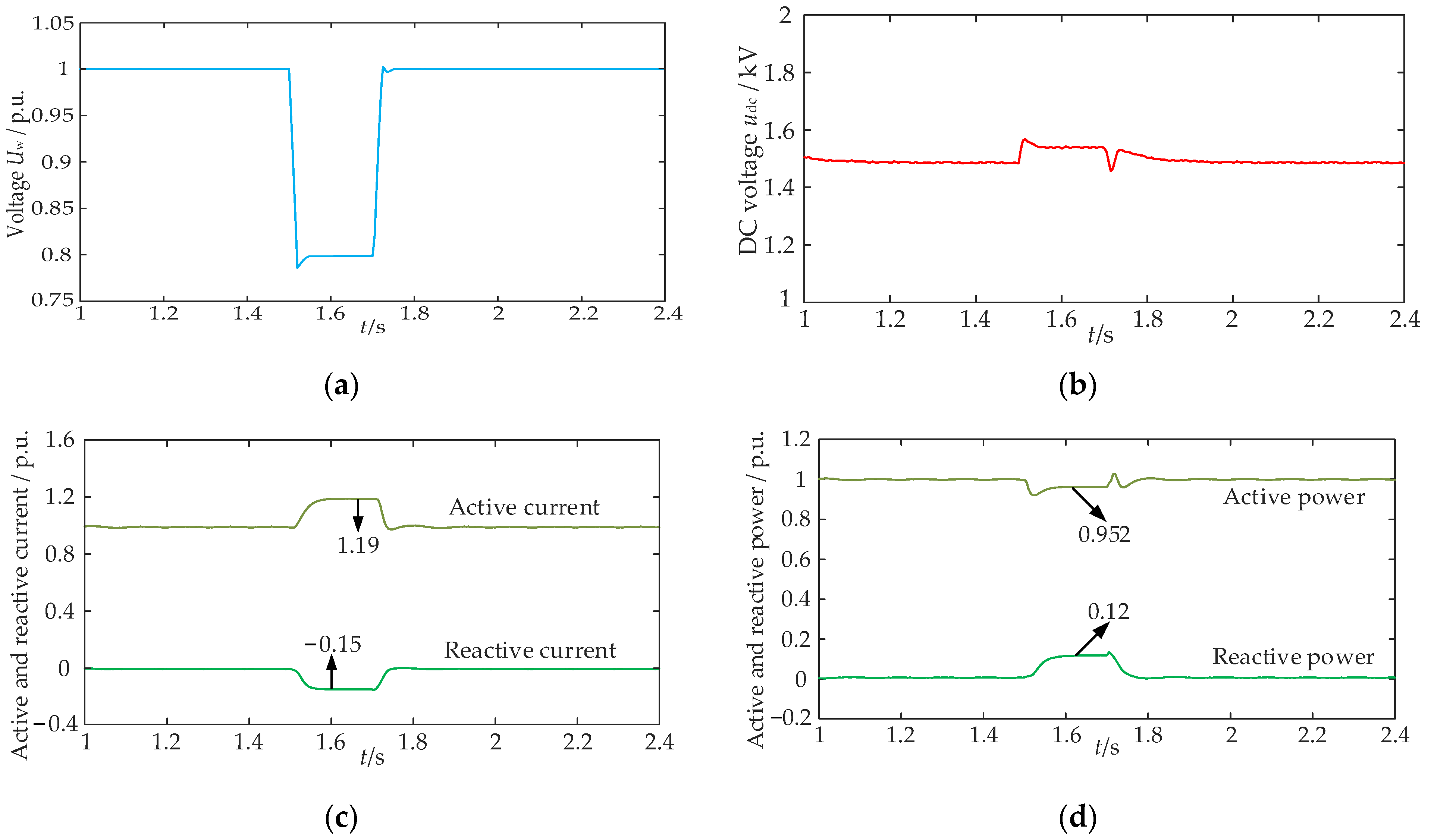
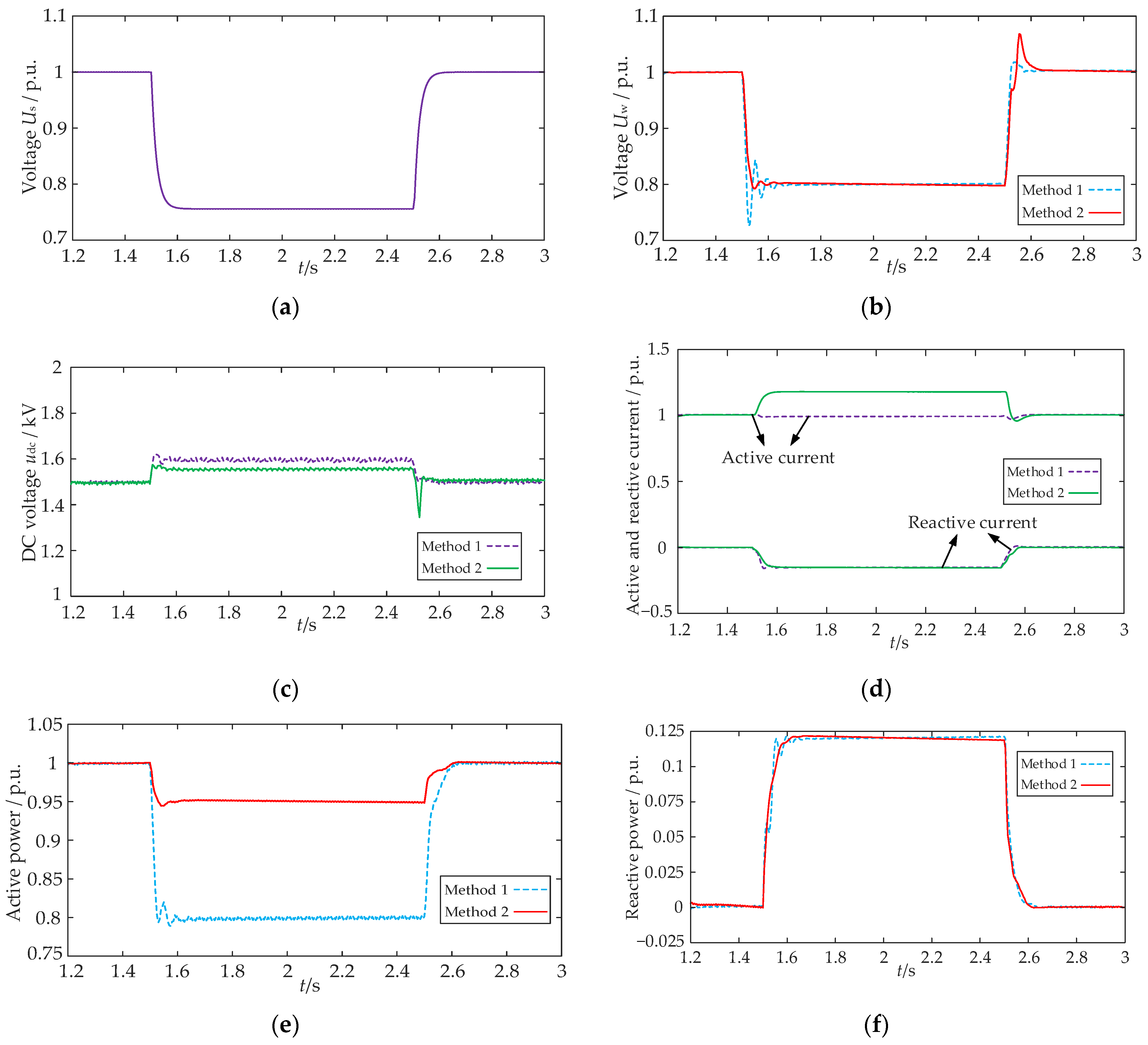
5.2. Case 1: Strong Grid (SCR = 10), P0 = 1 p.u., Uw = 0.8 p.u.
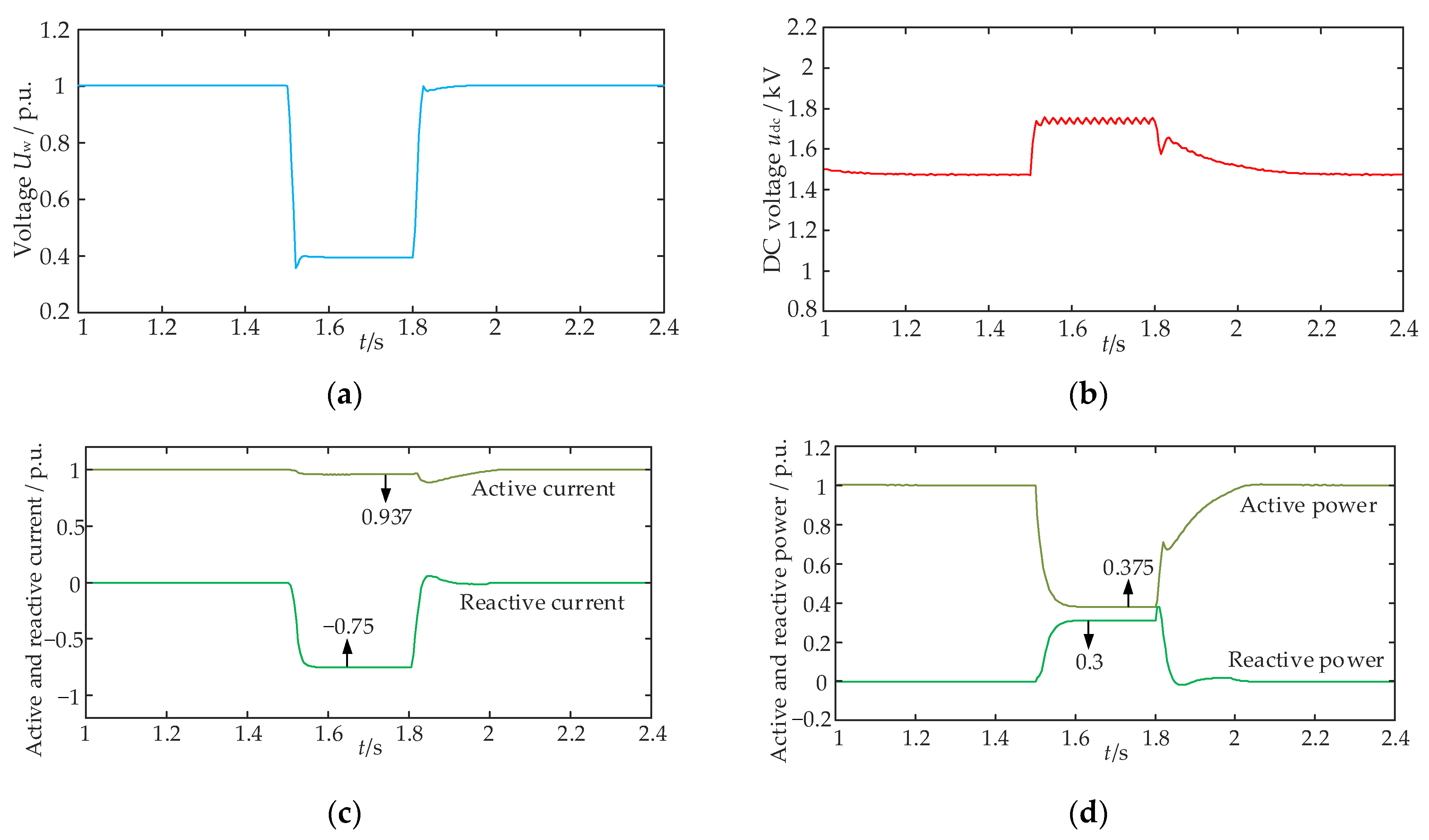
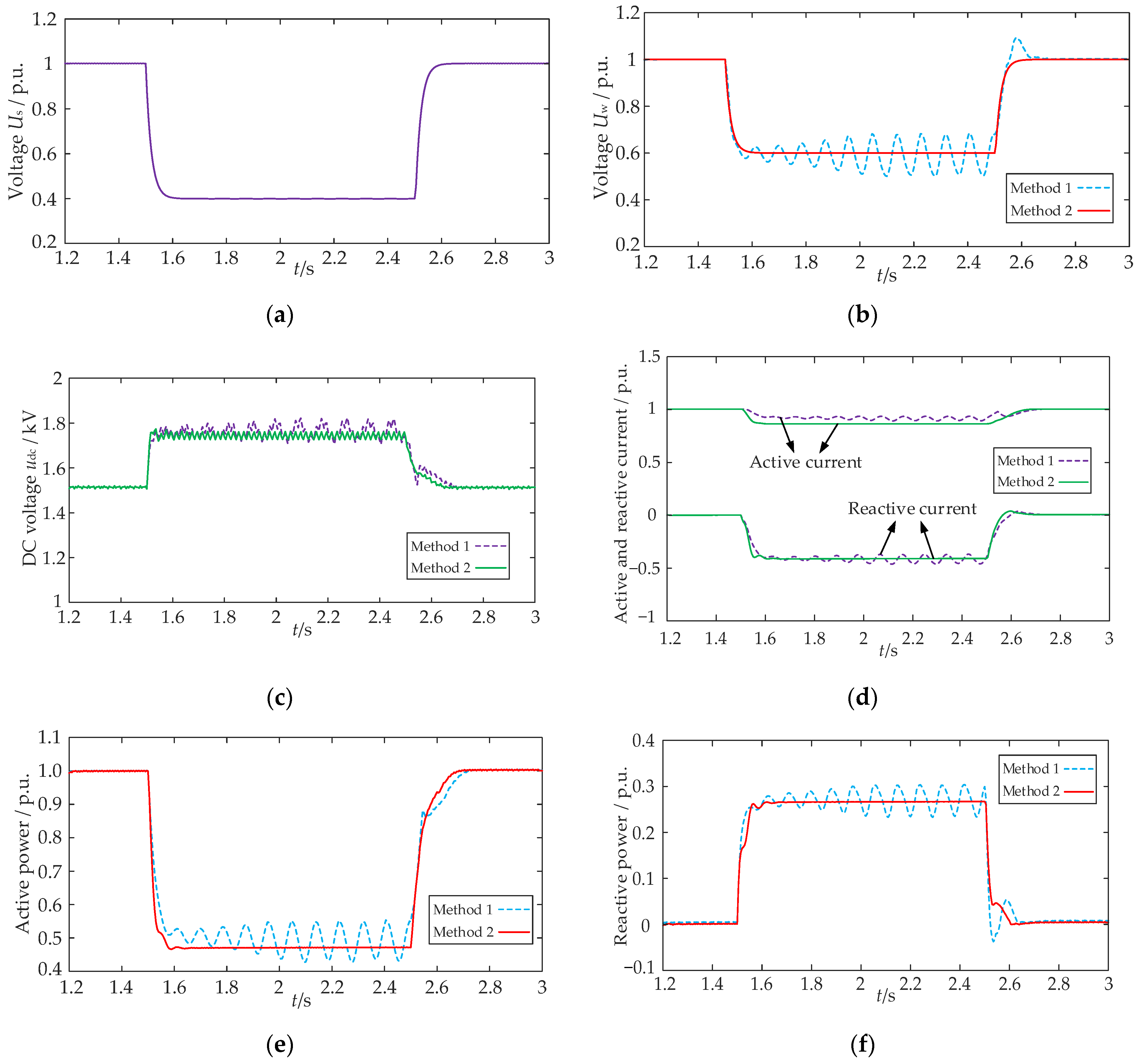
5.3. Case 2: Strong Grid (SCR = 10), P0 = 1 p.u., Uw = 0.4 p.u.
5.4. Case 3: Strong Grid (SCR = 5), P0 = 0.5 p.u., Uw = 0.7 p.u.
5.5. Case 4: Weak Grid (SCR = 1.5), P0 = 1 p.u., Uw = 0.8 p.u.
5.6. Case 5: Weak Grid (SCR = 1.5), P0 = 1 p.u., Uw = 0.6 p.u.
6. Conclusions
- (1)
- The proposed solution combining GSC’s short-time overcurrent capacity and chopper can mitigate the DC-link overvoltage arising from unbalanced power during low-voltage fault.
- (2)
- The feasible current region considering GSC current ability, pre-fault power ability, LVRT requirement, and synchronization stability is further explored to provide accurate guidance for transient current control, which presents visual characterization of transient current references more reasonably.
- (3)
- The proposed method suppresses power oscillations and ensures voltage stability more effectively compared to the traditional LVRT method. Extensive simulations have confirmed its excellent performance in transient stability under different voltage dip or grid impedance conditions, without requiring additional hardware investment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.; Zhang, G.; Hu, W.; Huang, Q.; Chen, Z.; Blaabjerg, F. Meta-learning based voltage control for renewable energy integrated active distribution network against topology change. IEEE Trans. Power Syst. 2023, 38, 5937–5940. [Google Scholar] [CrossRef]
- Li, J.; Wu, J.; Wang, H.; Zhang, Q.; Zheng, H.; Song, Y. Sequential model predictive control for grid connection in offshore wind farms based on active disturbance rejection. J. Mar. Sci. Eng. 2024, 12, 21. [Google Scholar] [CrossRef]
- The International Renewable Energy Agency (IRENA). Renewable Energy Statistics 2023. Available online: https://www.irena.org/Publications/2023/Jul/Renewable-energy-statistics-2023 (accessed on 6 July 2023).
- Song, D.; Shen, G.; Huang, C.; Huang, Q.; Yang, J.; Dong, M.; Joo, Y.; Duić, N. Review on the application of artificial intelligence methods in the control and design of offshore wind power systems. J. Mar. Sci. Eng. 2024, 12, 424. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Lian, J. Review of integrated installation technologies for offshore wind turbines: Current progress and future development trends. Energy Convers. Manag. 2022, 255, 115319. [Google Scholar] [CrossRef]
- Deng, J.; Cheng, F.; Yao, L.; Xu, J.; Mao, B.; Li, X.; Chen, R. A review of system topologies, key operation and control technologies for offshore wind power transmission based on HVDC. IET Gener. Transm. Distrib. 2023, 17, 3345–3363. [Google Scholar] [CrossRef]
- Jia, K.; Yang, Z.; Zheng, L.; Zhu, Z.; Bi, T. Spearman correlation-based pilot protection for transmission line connected to PMSGs and DFIGs. IEEE Trans. Ind. Inform. 2021, 17, 4532–4544. [Google Scholar] [CrossRef]
- Xue, T.; Lyu, J.; Wang, H.; Cai, X. A complete impedance model of a PMSG-based wind energy conversion system and its effect on the stability analysis of MMC-HVDC connected offshore wind farms. IEEE Trans. Energy Convers. 2021, 36, 3449–3461. [Google Scholar] [CrossRef]
- Li, B.; Zheng, D.; Li, B.; Jiao, X.; Hong, Q.; Ji, L. Analysis of low voltage ride-through capability and optimal control strategy of doubly-fed wind farms under symmetrical fault. Prot. Control Mod. Power Syst. 2023, 8, 36. [Google Scholar] [CrossRef]
- Li, W.; Zhu, M.; Chao, P.; Liang, X.; Xu, D. Enhanced FRT and postfault recovery control for MMC-HVDC connected offshore wind farms. IEEE Trans. Power Syst. 2020, 35, 1606–1617. [Google Scholar] [CrossRef]
- Wei, J.; Cao, Y.; Wu, Q.; Li, C.; Huang, S.; Zhou, B.; Xu, D. Coordinated droop control and adaptive model predictive control for enhancing HVRT and post-event recovery of large-scale wind farm. IEEE Trans. Sustain. Energy 2021, 12, 1549–1560. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, H.; Li, W.; Jia, Y.; Han, Z.; Tao, X. A FRCC method based on rapid voltage response for LVRT recovery of D-PMSG. Energy Sources Part A Recovery Util. Environ. Eff. 2019, 45, 8320–8336. [Google Scholar] [CrossRef]
- Saidi, Y.; Mezouar, A.; Benmahdjoub, M.; Brahmi, B.; Meddah, A.; Khalfallah, B.; Kerrouche, K. A comprehensive review of LVRT capability and advanced nonlinear backstepping control of grid-connected wind-turbine-driven permanent magnet synchronous generator during voltage dips. J. Control Autom. Electr. Syst. 2022, 33, 1773–1791. [Google Scholar] [CrossRef]
- Guan, L.; Yao, J. Dynamic stability improvement scheme for dual-sequence PLLs in VSC based renewable energy generation system during asymmetrical LVRT. Int. J. Power Energy Syst. 2023, 145, 108683. [Google Scholar] [CrossRef]
- Gajewski, P.; Pieńkowski, K. Control of wind turbine system with PMSG for low voltage ride through. In Proceedings of the International Symposium on Electrical Machines (SME), Andrychow, Poland, 10–13 June 2018; pp. 1–5. [Google Scholar]
- Thet, A.; Saitoh, H. Pitch control based on voltage dip detection for improving the LVRT of wind farm. IEEJ Trans. Electr. Electron. Eng. 2012, 7, 136–143. [Google Scholar] [CrossRef]
- Magesh, T.; Devi, G.; Lakshmanan, T. Improving the performance of grid connected wind generator with a PI control scheme based on the metaheuristic golden eagle optimization algorithm. Electr. Power Syst. Res. 2023, 214, 108944. [Google Scholar] [CrossRef]
- Uddin, M.; Arifin, M.; Rezaei, N. A novel neuro-fuzzy based direct power control of a DFIG based wind farm incorporated with distance protection scheme and LVRT capability. IEEE Trans. Ind. Appl. 2023, 59, 5792–5803. [Google Scholar] [CrossRef]
- Nasiri, M.; Arzani, A. Robust control scheme for the braking chopper of PMSG-based wind turbines-a comparative assessment. Int. J. Elec. Power. 2022, 134, 107322. [Google Scholar] [CrossRef]
- Yao, J.; Liu, R.; Zhou, T.; Hu, W.; Chen, Z. Coordinated control strategy for hybrid wind farms with DFIG-based and PMSG-based wind farms during network unbalance. Renew. Energy 2017, 105, 748–763. [Google Scholar] [CrossRef]
- Dayo, S.; Memon, S.; Uqaili, M. LVRT enhancement of a grid-tied PMSG-based wind farm using static VAR compensator. Eng. Technol. Appl. Sci. Res. 2021, 11, 7146–7151. [Google Scholar] [CrossRef]
- Muriithi, C.; Kamau, S. STATCOM controller tuning to enhance LVRT capability of grid-connected wind power generating plants. J. Electr. Comput. Eng. 2022, 2022, 2873053. [Google Scholar]
- Yunus, A.; Abu-Siada, A.; Masoum, M.; El-Naggar, M.; Jin, J. Enhancement of DFIG LVRT capability during extreme short-wind gust events using SMES technology. IEEE Access 2020, 8, 47264–47271. [Google Scholar] [CrossRef]
- Kim, C.; Kim, W. Enhanced low-voltage ride-through coordinated control for PMSG wind turbines and energy storage systems considering pitch and inertia response. IEEE Access 2020, 8, 212557–212567. [Google Scholar] [CrossRef]
- Hossain, M.; Pota, H.; Ugrinovskii, V.; Ramos, R. Simultaneous STATCOM and pitch angle control for improved LVRT capability of fixed-speed wind turbines. IEEE Trans. Sustain. Energy 2010, 1, 142–151. [Google Scholar] [CrossRef]
- Liu, J.; Sun, K.; Li, K.; Li, Y.; Zhang, J. A novel power injection priority optimization strategy for voltage support control of PMSG-based wind farm. IEEE Trans. Ind. Appl. 2023, 59, 2152–2161. [Google Scholar] [CrossRef]
- Murzakhanov, I.; Vishwanath, G.; Vemalaiah, K.; Prashal, G.; Chatzivasileiadis, S.; Padhy, N. A novel decentralized inverter control algorithm for loss minimization and LVRT improvement. Electr. Power Syst. Res. 2023, 221, 109433. [Google Scholar] [CrossRef]
- Jin, X.; Nian, H.; Pang, B. Optimal power distribution method for wind farms to enhance the FRT capability of the LCC-HVDC system under commutation failure. IEEE Access 2021, 9, 108212–108222. [Google Scholar] [CrossRef]
- Shan, J.; Wang, Z.; Zhou, C.; Zhang, Z. A P-Q coordination method for wind farm to mitigate system frequency deviation during LVRT period. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- He, X.; Geng, H.; Li, R.; Pal, B. Transient stability analysis and enhancement of renewable energy conversion system during LVRT. IEEE Trans. Sustain. Energy 2020, 11, 1612–1623. [Google Scholar] [CrossRef]
- Wang, Z.; Zhu, G.; Wu, H.; Gao, X.; Ding, L.; Wang, X. Current reference control scheme of voltage source converters to ensure the existence of stable equilibrium points during grid fault. IEEE Trans. Power Electron. 2023, 38, 10750–10765. [Google Scholar] [CrossRef]
- Zhao, H.; Zhou, H.; Yao, W.; Zong, Q.; Wen, J. Multi-Stage sequential network energy control for offshore AC asymmetric fault ride-through of MMC-HVDC system integrated offshore wind farms. Int. J. Power Energy Syst. 2023, 151, 109180. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, J.; Liu, H. FRT improvement strategy for offshore wind farm considering operation state. In Proceedings of the 2018 Youth Academic Annual Conference of Chinese Association of Automation, Nanjing, China, 18–20 May 2018; pp. 421–426. [Google Scholar]
- Hu, Q.; Ji, F.; Ma, F.; Zhang, Y.; Fu, L. Matching analysis of LVRT grid code and injection current dependent voltage response of WTC connected to high impedance AC grid. IEEE Trans. Energy Convers. 2022, 37, 2236–2239. [Google Scholar] [CrossRef]
- Shabbir, M.; Liang, X.; Li, W.; Khan, N.; Le, A. A novel data driven voltage control approach for grid connected wind power plants. IEEE Trans. Ind. Appl. 2019, 55, 3376–3393. [Google Scholar] [CrossRef]
- Yuan, L.; Meng, K.; Huang, J.; Dong, Z.; Wang, W.; Xie, X. Development of HVRT and LVRT control strategy for PMSG-based wind turbine generators. Energies 2020, 13, 5442. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated power/MW | 5.0 |
| Rated AC voltage/kV | 0.69 |
| Rated wind speed/m/s | 11.4 |
| DC-link voltage/kV | 1.5 |
| System frequency/Hz | 50 |
| Case No. | Grid Strength | Pre-Fault Active Power | Fault Impedance | Fault Voltage | Fault Duration |
|---|---|---|---|---|---|
| Case 1 | SCR = 10, Xs/Rs = 3 | 1.0 p.u. | 0.0390 p.u. | 0.8 p.u. | 0.2 s |
| Case 2 | SCR = 10, Xs/Rs = 3 | 1.0 p.u. | 0.0053 p.u. | 0.4 p.u. | 0.2 s |
| Case 3 | SCR = 5.0, Xs/Rs = 3 | 0.5 p.u. | 0.0142 p.u. | 0.7 p.u. | 0.2 s |
| Case 4 | SCR = 1.5, Xs/Rs = 3 | 1.0 p.u. | 0.0063 p.u. | 0.8 p.u. | 1.0 s |
| Case 5 | SCR = 1.5, Xs/Rs = 3 | 1.0 p.u. | 0.0069 p.u. | 0.6 p.u. | 1.0 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Gao, B.; Cao, Z.; Fang, J. Grid-Impedance-Based Transient Current Control for Offshore Wind Turbines under Low-Voltage Fault. J. Mar. Sci. Eng. 2024, 12, 691. https://doi.org/10.3390/jmse12050691
Yang Z, Gao B, Cao Z, Fang J. Grid-Impedance-Based Transient Current Control for Offshore Wind Turbines under Low-Voltage Fault. Journal of Marine Science and Engineering. 2024; 12(5):691. https://doi.org/10.3390/jmse12050691
Chicago/Turabian StyleYang, Zhichao, Bingtuan Gao, Zeyu Cao, and Jinyuan Fang. 2024. "Grid-Impedance-Based Transient Current Control for Offshore Wind Turbines under Low-Voltage Fault" Journal of Marine Science and Engineering 12, no. 5: 691. https://doi.org/10.3390/jmse12050691
APA StyleYang, Z., Gao, B., Cao, Z., & Fang, J. (2024). Grid-Impedance-Based Transient Current Control for Offshore Wind Turbines under Low-Voltage Fault. Journal of Marine Science and Engineering, 12(5), 691. https://doi.org/10.3390/jmse12050691