
Distributed Formation–Containment Tracking Control for Multi-Hovercraft Systems with Compound Perturbations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Compared with the literature [27], this paper expands the formation–containment motion to the cooperative mission of 4-DOF hovercraft that considers compound uncertainties and underactuated problems. Furthermore, the asymptotic stability of the controller is proved by Lyapunov’s method. This layered structure allows for more complex and flexible tasks and provides greater adaptability to the complex sea operations of hovercraft.
- By introducing an auxiliary variable in the cooperative error, the underactuated problem of the hovercraft is solved. Compared with the literature [7], multiple derivations of the virtual control law are avoided, thus reducing the excessive differential terms in the yaw direction control law. Compared with reference [18], a novel scheme is designed to solve the underactuated problem in the formation–containment controller design process.
- A novel ALESO is combined with RBFNN to estimate the unknown ocean disturbances and model uncertainties of hovercraft. Compared with reference [20], the ALESO relaxes the restriction on the change rate of disturbances. By adding a linear adaptive factor to the adaptive update law, it is easy to prove that all the closed-loop signals of the whole system are boundedly stable.
2. Mathematical Models and Preliminary Knowledge
2.1. Mathematical Models
2.2. Preliminary Knowledge
2.3. Control Objective
- (1)
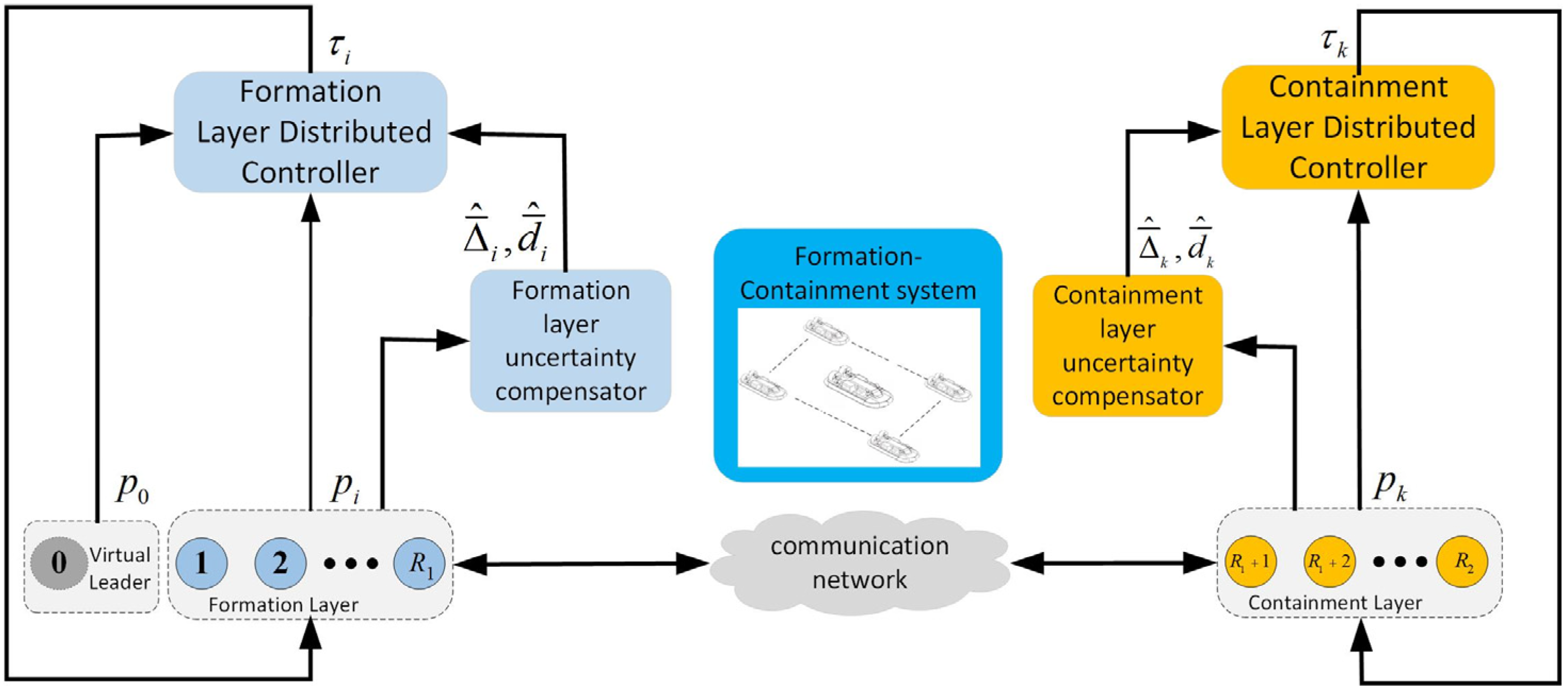
- In the formation layer, the control scheme is used to make the formula , hold, in which and represent the position information of the th leader and the virtual leader, respectively. represents the expected position deviation of the leader hovercraft relative to the virtual leader hovercraft, is a small constant, and the leaders in the multi-hovercraft system realize formation tracking.
- (2)
- In the containment layer, the control scheme is used to make , hold, where the non-negative constant satisfies , is the position information of the th hovercraft, and is a small constant, and the followers in the multi-hovercraft system realize the containment control.

3. Formation–Containment System Controller Design
3.1. Formation Layer Controller Design
3.2. Containment Layer Controller Design
4. Stability Analysis
5. Simulation




6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fu, H. Analysis and Consideration on Safety of All-lift Hovercraft. Ship Boat 2008, 19, 1–3. [Google Scholar]
- Yun, L.; Wu, C. High-performance ships for the 21st century. Ship Ocean Eng. 1997; 3–5+7–8+10–12. [Google Scholar]
- Fu, M.; Gao, S.; Wang, C.; Li, M. Design of driver assistance system for air cushion vehicle with uncertainty based on model knowledge neural network. Ocean Eng. 2019, 172, 296–307. [Google Scholar] [CrossRef]
- Fu, M.; Dong, L.; Xu, Y.; Dan, B. A novel asymmetrical integral barrier Lyapunov function-based trajectory tracking control for hovercraft with multiple constraints. Ocean Eng. 2022, 263, 112132. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ding, F.; Wang, D. Safety-guaranteed adaptive neural motion control for a hovercraft with multiple constraints. Ocean Eng. 2021, 220, 108401. [Google Scholar] [CrossRef]
- Morales, R.; Sira-Ramirez, H.; Somolinos, J.A. Linear active disturbance rejection control of the hovercraft vessel model. Ocean Eng. 2015, 96, 100–108. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ding, F. Adaptive finite-time PI sliding mode trajectory tracking control for underactuated hovercraft with drift angle constraint. IEEE Access 2019, 7, 184885–184895. [Google Scholar] [CrossRef]
- Chen, L.; Mei, J.; Li, C.; Ma, G. Distributed Leader-Follower Affine Formation Maneuver Control for High-Order Multiagent Systems. IEEE Trans. Autom. Control 2020, 65, 4941–4948. [Google Scholar] [CrossRef]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications. IEEE Trans. Control Syst. Technol. 2015, 23, 340–348. [Google Scholar] [CrossRef]
- Hu, J.; Bhowmick, P.; Lanzon, A. Distributed Adaptive Time-Varying Group Formation Tracking for Multiagent Systems with Multiple Leaders on Directed Graphs. IEEE Trans. Control Netw. Syst. 2020, 7, 140–150. [Google Scholar] [CrossRef]
- Lin, A.; Jiang, D.; Zeng, J.-P. Underactuated Ship Formation Control with Input Saturation. Acta Autom. Sin. 2018, 44, 1496–1504. [Google Scholar]
- Gu, N.; Peng, Z.; Wang, D.; Zhang, F. Path-Guided Containment Maneuvering of Mobile Robots: Theory and Experiments. IEEE Trans. Ind. Electron. 2021, 68, 7178–7187. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.; Li, T.; Tong, S. Model-Free Containment Control of Underactuated Surface Vessels under Switching Topologies Based on Guiding Vector Fields and Data-Driven Neural Predictors. IEEE Trans. Cybern. 2022, 52, 10843–10854. [Google Scholar] [CrossRef] [PubMed]
- Gu, N.; Wang, D.; Peng, Z.; Liu, L. Observer-Based Finite-Time Control for Distributed Path Maneuvering of Underactuated Unmanned Surface Vehicles with Collision Avoidance and Connectivity Preservation. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 51, 5105–5115. [Google Scholar] [CrossRef]
- Dong, X.; Li, Q.; Ren, Z.; Zhong, Y. Formation–containment control for high-order linear time-invariant multi-agent systems with time delays. J. Frankl. Inst.-Eng. Appl. Math. 2015, 352, 3564–3584. [Google Scholar] [CrossRef]
- Cui, Y.; Xu, J.; Xing, W.; Huang, F.; Yan, Z.; Wu, D.; Chen, T. Anti-disturbance cooperative formation containment control for multiple autonomous underwater vehicles with actuator saturation. Ocean Eng. 2022, 266, 113026. [Google Scholar] [CrossRef]
- Wang, J.; Shan, Q.; Li, T.; Xiao, G.; Xu, Q. Collision-Free Formation–containment Tracking of Multi-USV Systems with Constrained Velocity and Driving Force. J. Mar. Sci. Eng. 2024, 12, 304. [Google Scholar] [CrossRef]
- Xu, J.; Cui, Y.; Xing, W.; Huang, F.; Yan, Z.; Wu, D.; Chen, T. Anti-disturbance fault-tolerant formation containment control for multiple autonomous underwater vehicles with actuator faults. Ocean Eng. 2022, 266, 112924. [Google Scholar] [CrossRef]
- Gao, S. Research on the Safe Navigation Control Method of Full Cushion Lift Hovercraft under Uncertain Conditions; Harbin Engineering University: Harbin, China, 2019. [Google Scholar]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended State Observer-Based Integral Sliding Mode Control for an Underwater Robot with Unknown Disturbances and Uncertain Nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Hou, Z.; Xiong, S. On Model-Free Adaptive Control and Its Stability Analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Liu, Y.; Im, N.-k.; Zhang, Q.; Zhu, G. Adaptive Auto-Berthing Control of Underactuated Vessel Based on Barrier Lyapunov Function. J. Mar. Sci. Eng. 2022, 10, 279. [Google Scholar] [CrossRef]
- Jiang, Y.; Peng, Z.; Wang, D.; Yin, Y.; Han, Q.-L. Cooperative Target Enclosing of Ring-Networked Underactuated Autonomous Surface Vehicles Based on Data-Driven Fuzzy Predictors and Extended State Observers. IEEE Trans. Fuzzy Syst. 2022, 30, 2515–2528. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Peng, Z.; Gu, N.; Zhang, Y.; Liu, Y.; Wang, D.; Liu, L. Path-guided time-varying formation control with collision avoidance and connectivity preservation of under-actuated autonomous surface vehicles subject to unknown input gains. Ocean Eng. 2019, 191, 106501. [Google Scholar] [CrossRef]
- Li, D.; Zhang, W.; He, W.; Li, C.; Ge, S.S. Two-Layer Distributed Formation–Containment Control of Multiple Euler-Lagrange Systems by Output Feedback. IEEE Trans. Cybern. 2019, 49, 675–687. [Google Scholar] [CrossRef] [PubMed]
- Gu, N.; Wang, D.; Peng, Z.; Liu, L. Distributed containment maneuvering of uncertain under-actuated unmanned surface vehicles guided by multiple virtual leaders with a formation. Ocean Eng. 2019, 187, 105996. [Google Scholar] [CrossRef]
- Guo, B.-Z.; Zhao, Z.-L. On convergence of tracking differentiator. Int. J. Control 2011, 84, 693–701. [Google Scholar] [CrossRef]
- Yadegar, M.; Afshar, A.; Meskin, N. Fault-tolerant control of non-linear systems based on adaptive virtual actuator. IET Control Theory Appl. 2017, 11, 1371–1379. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Z.; Xu, Y.; Fu, M. Distributed Formation–Containment Tracking Control for Multi-Hovercraft Systems with Compound Perturbations. J. Mar. Sci. Eng. 2024, 12, 694. https://doi.org/10.3390/jmse12050694
Fan Z, Xu Y, Fu M. Distributed Formation–Containment Tracking Control for Multi-Hovercraft Systems with Compound Perturbations. Journal of Marine Science and Engineering. 2024; 12(5):694. https://doi.org/10.3390/jmse12050694
Chicago/Turabian StyleFan, Zhipeng, Yujie Xu, and Mingyu Fu. 2024. "Distributed Formation–Containment Tracking Control for Multi-Hovercraft Systems with Compound Perturbations" Journal of Marine Science and Engineering 12, no. 5: 694. https://doi.org/10.3390/jmse12050694
APA StyleFan, Z., Xu, Y., & Fu, M. (2024). Distributed Formation–Containment Tracking Control for Multi-Hovercraft Systems with Compound Perturbations. Journal of Marine Science and Engineering, 12(5), 694. https://doi.org/10.3390/jmse12050694