
Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research

 and
and
Abstract
:1. Introduction to Challenges
1.1. Modern Research Fleets, but Old Equipment and Gear
1.2. Challenges of Future Biodiversity Research: Modern Effective and Efficient Time-Saving Gear
2. State of the Art of Deep-Sea Benthic Research Gear
2.1. Wire-Dependent Systems (Corers, Dredges, Epibenthic Sledges, Trawls, ROVs)
2.1.1. Quantitative Sampling: Samples of a Defined Surface Area
2.1.2. Qualitative Sampling: Samples of Greater Size, but with Undefined Area Coverage
2.1.3. Optical (Camera-Based) Methods
2.1.4. Remotely-Operated Vehicles
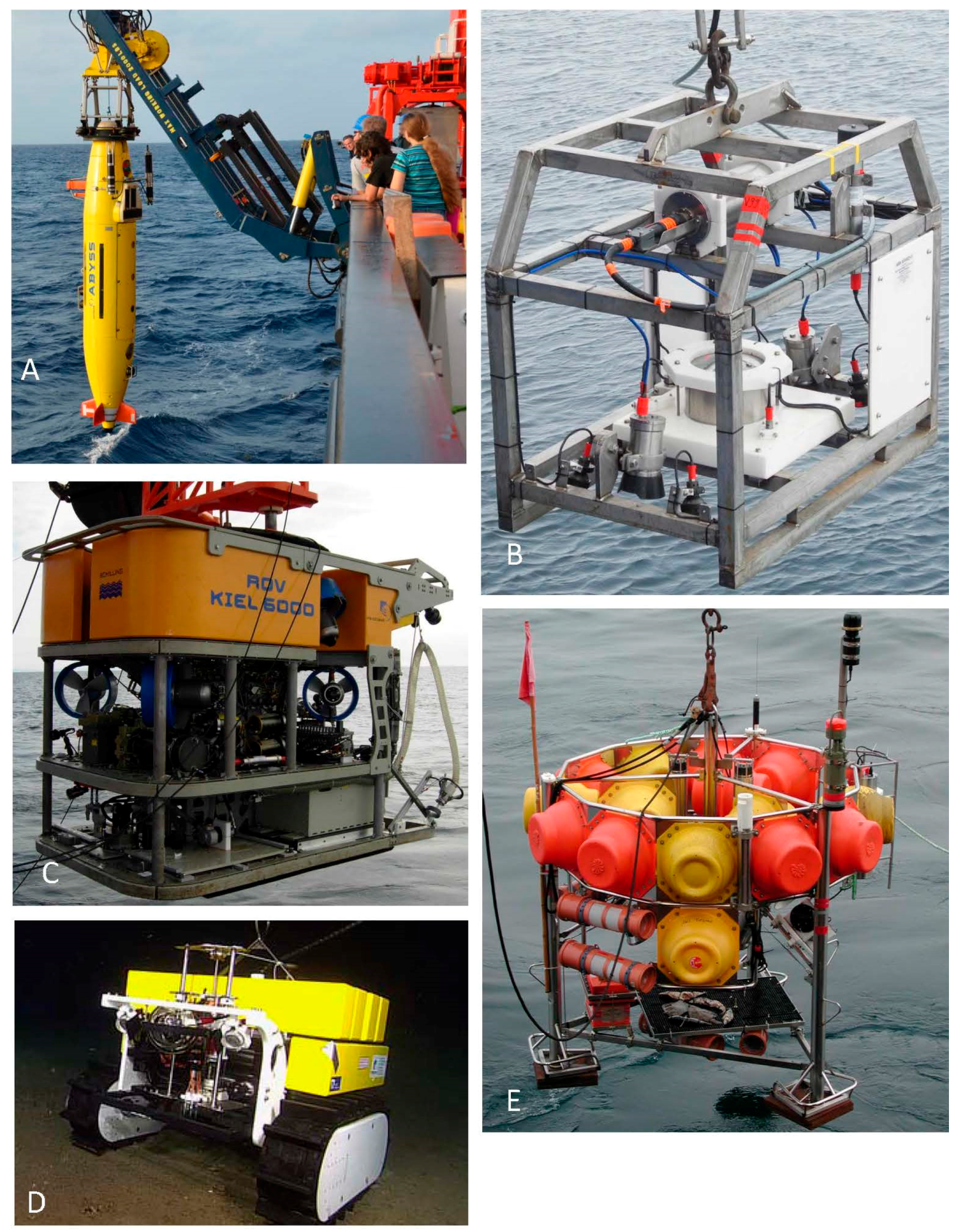
2.2. Untethered Autonomous Systems (i.e., Bottom Lander, Crawler Systems, Autonomous Underwater Vehicles)
2.2.1. Lander Systems
2.2.2. Crawler Systems
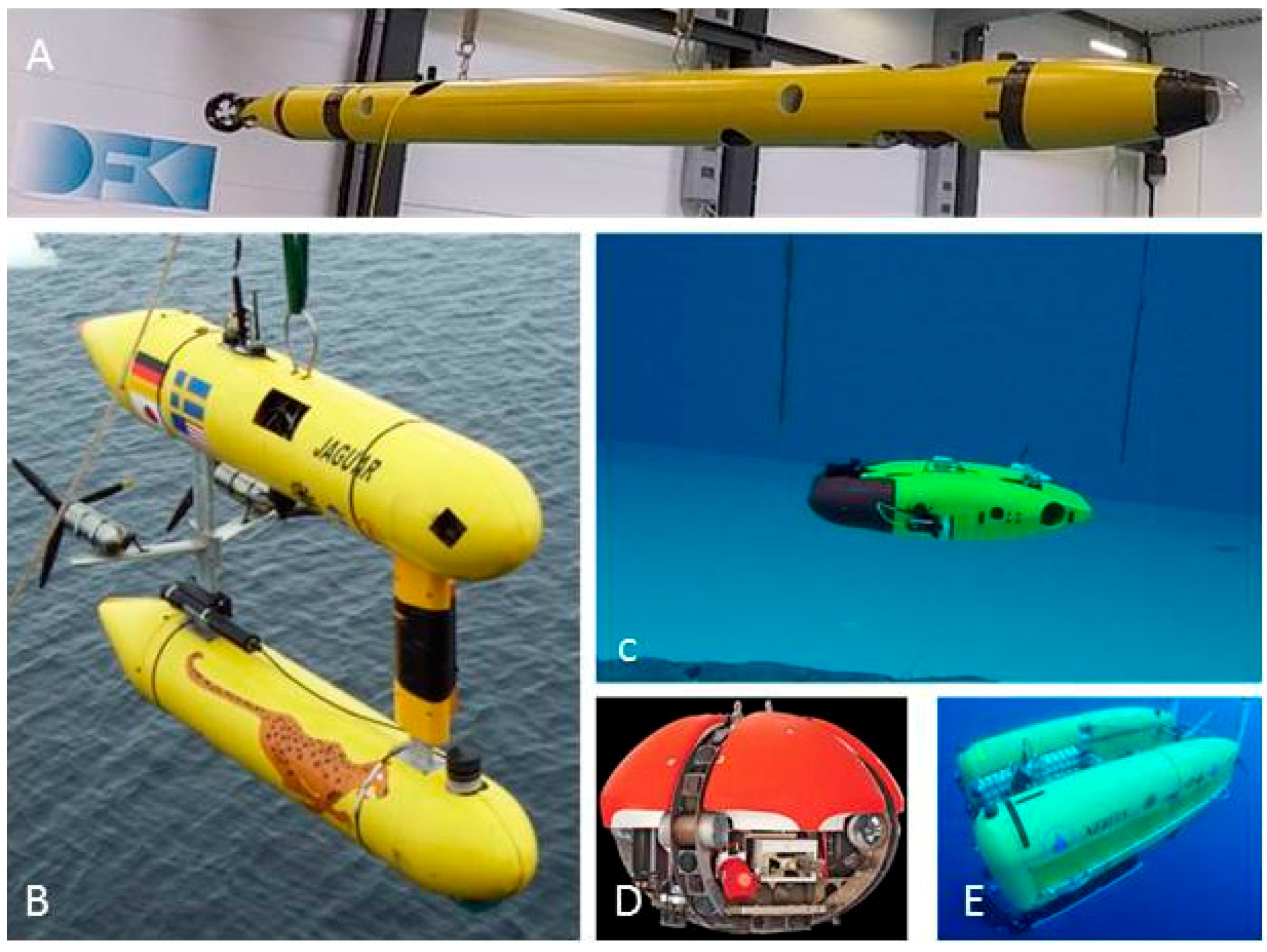
2.2.3. Autonomous Underwater Vehicles
3. Requirements for Research and Tools (Gear) for the Next Decades
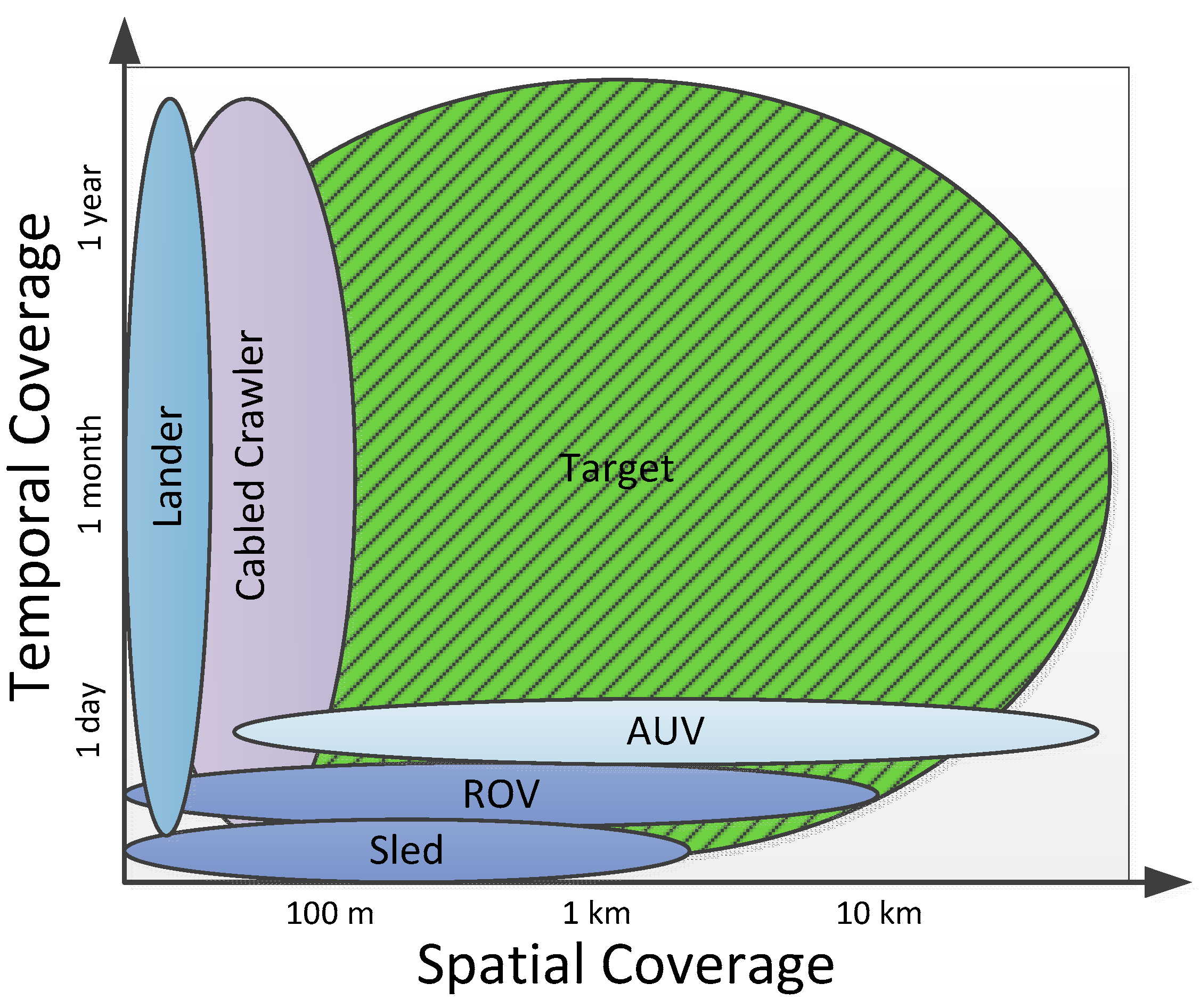
3.1. Improved Spatial and Temporal Resolution
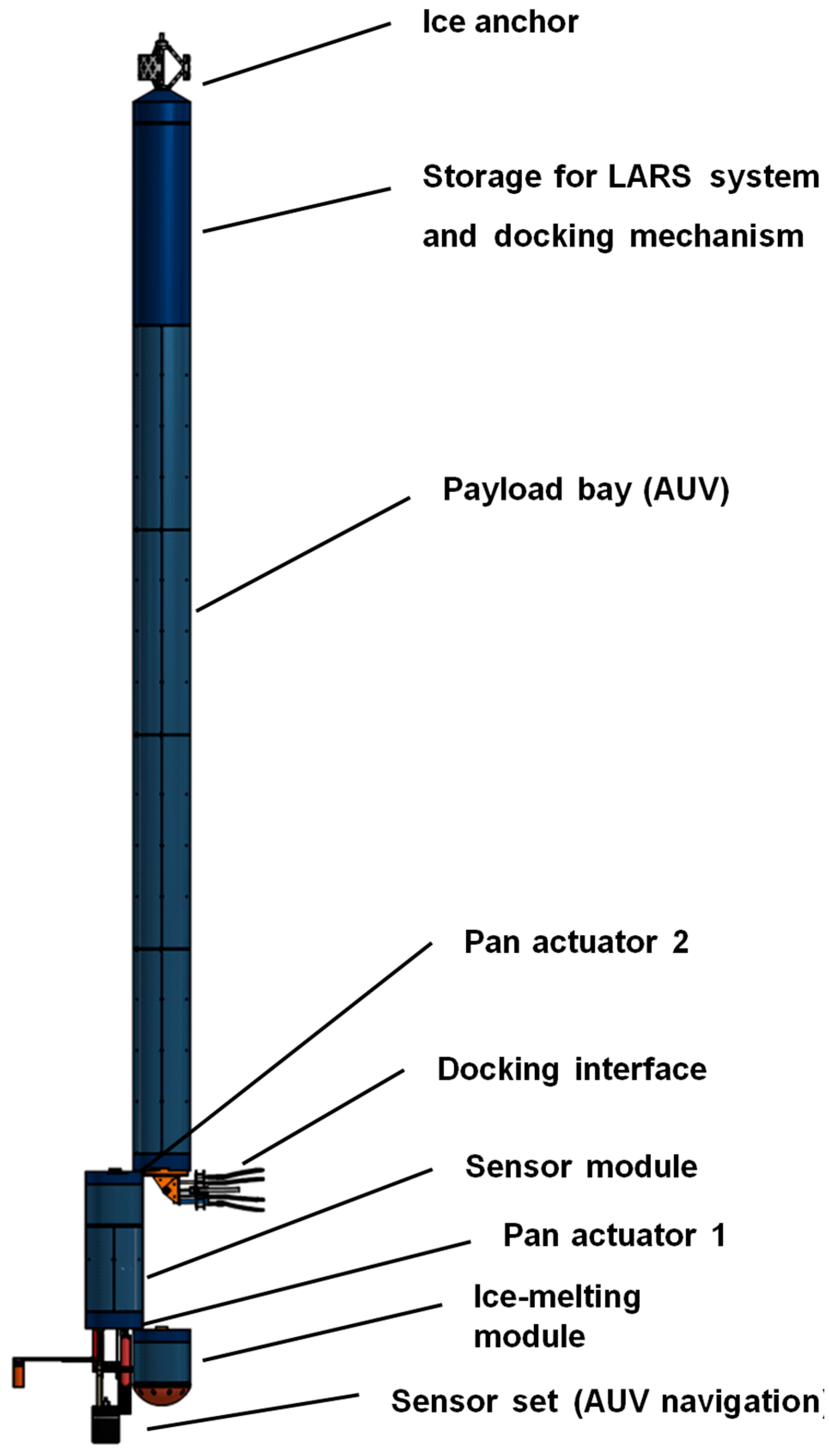
3.2. Increased Autonomy, Deployment Independent from a Deep-Sea Wire
3.3. In Situ Genomic and Metagenomic Analyses
4. Applicable Technologies from Robotics
4.1. Mobility
4.2. Navigation–Bathymetry, Mapping
4.2.1. Dead-Reckoning
4.2.2. Acoustic Localization
4.2.3. Visual Localization
4.3. Autonomous Systems
4.4. Sensor Processing
4.5. Manipulation: Sampling
4.6. Energy Supply
4.7. Swarm Systems
5. Vision: Real-Time Monitoring, In Situ Science
Technological Challenges
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Witte, U.; Wenzhöfer, F.; Sommer, S.; Boetius, A.; Heinz, P.; Aberle, N.; Sand, M.; Cremer, A.; Abraham, W.-R.; Jørgensen, B.B.; et al. In-situ experimental evidence of the fate of a phytodetritus pulse at the abyssal sea floor. Nature 2003, 424, 763–766. [Google Scholar] [CrossRef] [PubMed]
- Ebbe, B.; Billett, D.S.M.; Brandt, A.; Ellingsen, K.; Glover, A.; Keller, S.; Malyutina, M.; Martinez Arbizu, P.; Molodtsova, T.; Rex, M.; et al. Diversity of abyssal marine life. In Life in the World’s Oceans; McIntyre, A.D., Ed.; Blackwell Publishing Ltd.: Oxford, UK, 2010; Chapter 8; p. 361. [Google Scholar]
- Mora, C.; Tittensor, D.P.; Adl, S.; Simpson, A.G.B.; Worm, B. How many species are there on earth and in the ocean? PLoS Biol. 2011, 9, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Rex, M.A.; Etter, R.J. Deep-Sea Biodiversity. Pattern and Scale; Harvard University Press: Cambridge, MA, USA; London, UK, 2010. [Google Scholar]
- McClain, C.R.; Schlacher, T.A. On some hypotheses of diversity of animal life at great depths on the sea floor. Mar. Ecol. 2015, 36, 849–872. [Google Scholar] [CrossRef]
- Danovaro, R.; Snelgrove, P.V.; Tyler, P. Challenging the paradigms of deep-sea ecology. Trends Ecol. Evol. 2014, 29, 465–475. [Google Scholar] [CrossRef] [PubMed]
- Brandt, A.; Gooday, A.J.; Brix, S.B.; Brökeland, W.; Cedhagen, T.; Choudhury, M.; Cornelius, N.; Danis, B.; De Mesel, I.; Diaz, R.J.; et al. The Southern Ocean deep sea: First insights into biodiversity and biogeography. Nature 2007, 447, 307–311. [Google Scholar] [CrossRef] [PubMed]
- Corinaldesi, C. New perspectives in benthic deep-sea microbialecology. Front. Mar. Sci. 2015, 2, 1–12. [Google Scholar] [CrossRef]
- VanDover, C.L.; Aronson, J.; Pendleton, L.; Smith, S.; Arnaud-Haond, S.; Moreno-Mateos, D.; Barbier, E.; Billett, D.; Bowers, K.; Danovaro, R.; et al. Ecological restoration in the deep sea: Desiderata. Mar. Policy 2014, 44, 98–106. [Google Scholar] [CrossRef]
- Bruun, A.F. Animal life of the deep-sea bottom. In The Galathea Deep Sea Expedition 1950–1952; Bruun, A.F., Greve, S., Mielche, H., Spärk, R., Eds.; George, Allen and Unwin: London, UK, 1956; pp. 149–195. [Google Scholar]
- Belyaev, G. Deep-Sea Ocean Trenches and Their Fauna; Nauka: Moscow, Russia, 1989. [Google Scholar]
- Eleftheriou, A.; McIntyre, A.D. Methods for the Study of the Marine Benthos, 4th ed.; Eleftheriou, A., Ed.; John Wiley & Sons, Ltd.: New York, NY, USA, 2013; pp. 1–465. [Google Scholar]
- Sanders, H.L.; Hessler, R.R.; Hampson, G.R. An introduction to the study of deep-sea benthic faunal assemblages along the Gay Head-Bermuda transect. Deep-Sea Res. Part II 1965, 12, 845–867. [Google Scholar] [CrossRef]
- Hessler, R.R.; Sanders, H.L. Faunal diversity in the deep-sea. Deep-Sea Res. 1967, 14, 65–78. [Google Scholar] [CrossRef]
- Brandt, A.; Barthel, D. An improved supra- and epibenthic sledge for catching Peracarida (Crustacea, Malacostraca). Ophelia 1995, 43, 15–23. [Google Scholar] [CrossRef]
- Brenke, N. An epibenthic sledge for operations on marine soft bottom and bedrock. Mar. Technol. Soc. J. 2005, 39, 10–21. [Google Scholar] [CrossRef]
- Brandt, A.; Elsner, N.; Golovan, O.; Malyutina, M.V.; Riehl, T.; Schwabe, E.; Würzberg, L.; Brenke, N. Epifauna of the sea of Japan collected via a new epibenthic sledge equipped with camera and environmental sensor systems. Deep-Sea Res. Part II 2013, 86–87, 43–55. [Google Scholar] [CrossRef]
- Brandt, A.; Elsner, N.; Brenke, N.; Golovan, O.A.; Lavrenteva, A.V.; Malyutina, M.V.; Riehl, T. Abyssal macrofauna of the Kuril-Kamchatka Trench area collected by means of a camera-epibenthic sledge (Northwest Pacific). Deep-Sea Res. Part II 2015, 111, 175–188. [Google Scholar] [CrossRef]
- Brandt, A.; University of Hamburg, Hamburg, Germany. Personal communication, 2016.
- Wolff, T. The systematics and biology of bathyal and abyssal Isopoda Asellota. Galathea Rep. 1962, 6, 1–320. [Google Scholar]
- Wolff, T. Isopoda from depths exceeding 6000 m. Galathea Rep. 1956, 2, 85–157. [Google Scholar]
- Jamieson, A. The Hadal Zone: Life in the Deepest Oceans; Oxford University Press: Oxford, UK, 2015; pp. 1–372. [Google Scholar]
- Underwood, A.J.; Chapman, M.G. Design and analysis in benthic surveys in environmental sampling. In Methods for the Study of the Marine Benthos, 4th ed.; Eleftheriou, A., McIntyre, A.D., Eds.; John Wiley & Sons, Ltd.: New York, NY, USA, 2013; Chapter 1. [Google Scholar]
- Grassle, J.F.; Sanders, H.L.; Hessler, R.R.; Rowe, G.T.; McLellan, T. Pattern and zonation: A study of the bathyal megafauna using the research submersible Alvin. Deep Sea Res. Oceanogr. Abstr. 1975, 22, 457–462. [Google Scholar] [CrossRef]
- Rex, M.A. Community structure in the deep-sea benthos. Annu. Rev. Ecol. Syst. 1981, 12, 331–353. [Google Scholar] [CrossRef]
- Grassle, J.F.; Maciolek, N. Deep-Sea species richness: Regional and local diversity estimates from quantitative bottom samples. Am. Nat. 1992, 139, 313–341. [Google Scholar] [CrossRef]
- Brattegard, T.; Fosså, J.H. Replicability of an epibenthic sampler. J. Mar. Biol. Assoc. UK 1991, 71, 153–166. [Google Scholar] [CrossRef]
- Riehl, T.; Brenke, N.; Brix, S.B.; Driskell, A.; Kaiser, S.; Brandt, A. Field and laboratory methods for DNA studies on deep-sea isopod crustaceans. Pol. Polar Res. 2014, 35, 203–224. [Google Scholar] [CrossRef]
- Sessions, M.H.; Isaacs, J.D.; Schwartzlose, R.A. A camera system for the observation of deep-sea marine life. In Proceedings of the SPIE 0012, Underwater Photo-Optical Instrumentation Applications II, San Diego, CA, USA, August 1968. [CrossRef]
- Fernandes, P.G. Visual surveys can reveal rather different ‘pictures’ of fish densities: Comparison of trawl and video camera surveys in the Rockall Bank, NE Atlantic Ocean. Deep-Sea Res. Part I 2015, 95, 67–74. [Google Scholar]
- Bett, B.J. Time-lapse photography in the deep sea. Underw. Technol. 2003, 25, 121–127. [Google Scholar] [CrossRef]
- Smith, C.J.; Rumor, H. Imaging techniques. In Methods for the Study of the Marine Benthos, 4th ed.; Eleftheriou, A., McIntyre, A.D., Eds.; John Wiley & Sons, Ltd.: New York, NY, USA, 2013; Chapter 3; pp. 97–124. [Google Scholar]
- Smith, C.J.; Rumohr, H.; Karakassis, I.; Papadopoulou, K.-N. Analysing the impact of bottom trawls on sedimentary seabeds with sediment profile imagery. J. Exp. Mar. Biol. Ecol. 2003, 285, 479–496. [Google Scholar] [CrossRef]
- Ballard, R.D. The MEDEA/JASON remotely operated vehicle system. Deep-Sea Res. Part I 1993, 40, 1673–1687. [Google Scholar] [CrossRef]
- Nokin, M. Victor 6000—A deep teleoperated system for scientific research, OCEANS. In Proceedings of the MTS/IEEE Conference, Halifax, NS, Canada, 6–9 October 1997; Volume 1, pp. 167–171.
- Cai, M.; Sou, I.M.; Layman, C.; Bingham, B.; Allen, J. Characterization of the acoustic signature of a small remotely operated vehicle for detection. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010.
- Nokin, M.; Soltwedel, T.; Klages, M. Deployment of the deep-sea ROV VICTOR 6000 from board the German research icebreaker POLARSTERN in polar regions. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; Volume 2, pp. 943–947.
- Tengberg, A.; de Bovee, F.; Hall, P.; Berelson, W.; Chadwick, D.; Ciceri, G.; Crassous, P.; Devol, A.; Emerson, S.; Gage, J.; et al. Benthic chamber and profiling landers in oceanography—A review of design, technical solutions and functioning. Prog. Oceanogr. 1995, 35, 253–294. [Google Scholar] [CrossRef]
- Van Weering, T.C.; De Stigter, H.C.; Balzer, W.; Epping, E.H.; Graf, G.; Hall, I.R.; Thomsen, L. Benthic dynamics and carbon fluxes on the NW European continental margin. Deep Sea Res. Part II Top. Stud. Oceanogr. 2001, 48, 3191–3221. [Google Scholar] [CrossRef]
- Linke, P.; Wallmann, K.; Suess, E.; Hensen, C.; Rehder, G. In situ benthic fluxes from an intermittently active mud volcano at the Costa Rica convergent margin. Earth Planet. Sci. Lett. 2005, 235, 79–95. [Google Scholar] [CrossRef] [Green Version]
- Balfour, C.A. Cost-effective remote data acquisition and instrumentation management for oceanographic and environmental monitoring applications. J. Oper. Oceanogr. 2012, 5, 41–52. [Google Scholar] [CrossRef]
- Thomsen, L.; Purser, A.; Schwendner, J.; Duda, A.; Flogen, S.; Kwasnitschka, T.; Pfannkuche, O.; Wilde, D.; Rosta, R. Temporal and spatial benthic data collection via mobile robots: Present and future applications. In Proceedings of the IEEE OCEANS 2015, Genoa, Genova, 18–21 May 2015; pp. 1–5.
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, benefits and opportunities in operating cabled ocean observatories: Perspectives from NEPTUNE Canada. IEEE J. Ocean. Eng. 2013, 38, 144–157. [Google Scholar] [CrossRef]
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Wagner, H. Temporal and spatial benthic data collection via an internet operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Pirenne, B.; Thomsen, R.; Vogt, J. Ocean circulation promotes methane release from gas hydrate outcrops at the NEPTUNE Canada Barkley Canyon node. Geophys. Res. Lett. 2012, 39, L16605. [Google Scholar] [CrossRef]
- Roman, C.; Pizarro, O.; Eustice, R.M.; Singh, H. A new autonomous underwater vehicle for imaging research. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; pp. 153–156.
- Singh, H.; Eustice, R.M.; Roman, C.; Pizarro, O. The SeaBED AUV: A platform for high resolution imaging. In Proceedings of the Unmanned Underwater Vehicle Showcase, Southampton, UK, 25–26 September 2002.
- Hildebrandt, M.; Hilljegerdes, J. Design of a versatile AUV for high precision visual mapping and algorithm evaluation. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles (AUV), (AUV-2010), Monterey, CA, USA, 1–3 September 2010; pp. 1–6.
- Hildebrandt, M.; Gaudig, C.; Christensen, L.; Natarajan, S.; Hidalgo-Carrió, J.; Merz-Paranhos, P.; Kirchner, F. A Validation process for underwater localization algorithms. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef]
- Jurasinski, G.; Beierkuhnlein, C. Spatial patterns of biodiversity-assessing vegetation using hexagonal grids. Biol. Environ. Proc. R. Irish Acad. 2006, 106B, 401–411. [Google Scholar] [CrossRef]
- Rex, M.A.; McClain, C.R.; Johnson, N.A.; Etter, R.J.; Allen, J.A.; Bouchet, P.; Warén, A. A source-sink hypothesis for abyssal biodiversity. Am. Nat. 2005, 165, 163–178. [Google Scholar] [CrossRef] [PubMed]
- Smith, C.R.; De Leo, F.C.; Bernardino, A.F.; Sweetman, A.K.; Martinez Arbizu, P. Abyssal food limitation, ecosystem structure and climate change. Trend Ecol. Evol. 2008, 23, 518–528. [Google Scholar] [CrossRef] [PubMed]
- Wigham, P.D.; Tyler, P.A.; Billett, D.S.M. Reproductive biology of the abyssal holothurian Amperima rosea: An opportunistic response to variable flux of surface derived organic matter? J. Mar. Biol. Assoc. UK 2003, 83, 175–188. [Google Scholar] [CrossRef]
- Gage, J.D.; Tyler, P.A. Deep-Sea Biology: A Natural History of Organisms at the Deep-Sea Floor; Cambridge Univ. Press: Cambridge, UK, 1991. [Google Scholar]
- Kemp, K.M.; Jamieson, A.J.; Bagley, P.M.; Collins, M.A.; Priede, I.G. A new technique for periodic bait release at a deep-sea camera platform: First results from the Charlie-Gibbs Fracture Zone, Mid-Atlantic Ridge. Deep-Sea Res. Part II 2008, 55, 218–228. [Google Scholar] [CrossRef]
- Schöning, T.; Bergmann, M.; Ontrup, J.; Taylor, J.; Dannheim, J.; Gutt, J.; Purser, A.; Nattkemper, T.W. Semi-automated image analysis for the assessment of megafaunal densities at the Arctic deep-sea observatory HAUSGARTEN. PLoS ONE 2012, 7, e38179. [Google Scholar]
- Chennu, A.; Färber, P.; Volkenborn, N.; Al-Najjar, M.A.A.; Janssen, F.; de Beer, D.; Polerecky, L. Hyperspectral imaging of the microscale distribution and dynamics of microphytobenthos in intertidal sediments. Limnol. Oceanogr. Methods 2013, 11, 511–528. [Google Scholar] [CrossRef] [Green Version]
- Baker, M.C.; Ramirez-Llodra, E.Z.; Tyler, P.A.; German, C.R.; Boetius, A.; Cordes, E.E.; Dubilier, N.; Fisher, C.R.; Levin, L.A.; Metaxas, A.; et al. Biogeography, ecology, and vulnerability of chemosynthetic ecosystems in the deep sea. In Life in the World’s Oceans; McIntyre, A.D., Ed.; Blackwell Publishing Ltd.: Oxford, UK, 2010; Chapter 9; pp. 161–182. [Google Scholar]
- Menot, L.; Sibuet, M.; Carney, R.S.; Levin, L.A.; Rowe, G.T.; Billett, D.S.M.; Poore, G.C.B.; Kitazato, H.; Vanreusel, A.; Galéron, J.; et al. New perceptions of continental margin biodiversity. In Life in the World’s Oceans; McIntyre, A.D., Ed.; Blackwell Publishing Ltd.: Oxford, UK, 2010; Chapter 6; pp. 79–101. [Google Scholar]
- Dell’Anno, A.; Danovaro, R. Extracellular DNA plays a key role in deep-sea ecosystem functioning. Science 2005, 309, 2179. [Google Scholar] [CrossRef] [PubMed]
- Corinaldesi, C.; Barucca, M.; Luna, G.M.; Dell’Anno, A. Preservation, origin and genetic imprint of extracellular DNA in permanently anoxic deep-sea sediments. Mol. Ecol. 2011, 20, 642–654. [Google Scholar] [CrossRef] [PubMed]
- Lejzerowicz, F.; Majewski, M.; Szczuciński, W.; Decelle, J.; Obadia, C.; Martinez Arbizu, P.; Pawlowski, J. Ancient DNA complements microfossil record in deep-sea subsurface sediments. Biol. Lett. 2013, 9, 20130283. [Google Scholar] [CrossRef] [PubMed]
- Boere, A.C.; Rijpstra, W.I.C.; de Lange, G.J.; Sinninghe Damsté, J.S.; Coolen, M.J.L. Preservation potential of ancient plankton DNA in Pleistocene marine sediments. Geobiology 2011, 9, 377–393. [Google Scholar] [CrossRef] [PubMed]
- Corinaldesi, C.; Danovaro, R.; Dell’Anno, A. Simultaneous recovery of extracellular and intracellular DNA suitable for molecular studies from marine sediments. Appl. Environ. Microbiol. 2005, 71, 46–50. [Google Scholar] [CrossRef] [PubMed]
- Pawlowski, J.; Christen, R.; Lecroq, L.; Bachar, L.; Shahbazkia, H.R.; Amaral-Zettler, L.; Guillou, L. Eukaryotic richness in the abyss: Insights from pyrotag sequencing. PLoS ONE 2011, 6, e18169. [Google Scholar] [CrossRef] [PubMed]
- Edgcomb, V.P.; Beaudoin, D.; Gast, R.; Biddle, J.F.; Teske, A. Marine subsurface eukaryotes: The fungal majority. Environ. Microbiol. 2011, 13, 172–183. [Google Scholar] [CrossRef] [PubMed]
- Lecroq, B.; Lejzerowicz, F.; Christen, R.; Esling, P.; Baerlocher, L.; Osteras, M.; Farinelli, L.; Pawlowski, J. Ultra-deep sequencing of foraminiferal microbarcodes unveils hidden richness of early monothalamous lineages in deep-sea sediments. Proc. Natl. Acad. Sci. USA 2011, 108, 13177–13182. [Google Scholar] [CrossRef] [PubMed]
- Lai, Q.; Liu, Y.; Yuan, J.; Du, J.; Wang, L.; Sun, F.; Shao, Z. Multilocus sequence analysis for assessment of phylogenetic diversity and biogeography in Thalassospira bacteria from diverse marine environments. PLoS ONE 2014, 9, e106353. [Google Scholar] [CrossRef] [PubMed]
- Lejzerowicz, F.; Esling, P.; Pawlowski, J. Patchiness of deep-sea benthic Foraminifera across the Southern Ocean: Insights from high-throughput DNA sequencing. Deep-Sea Res. Part II 2014, 108, 17–27. [Google Scholar] [CrossRef]
- Creer, S.; Sinniger, F. Cosmopolitanism of microbial eukaryotes in the global deep seas. Mol. Ecol. 2012, 21, 1033–1035. [Google Scholar] [CrossRef] [PubMed]
- Bik, H.M.; Sung, W.; De Ley, P.; Baldwin, J.G.; Sharma, J.; Rocha-Olivares, A.; Thomas, W.K. Metagenetic community analysis of microbial eukaryotes illuminates biogeographic patterns in deep-sea and shallow water sediments. Mol. Ecol. 2011, 21, 1048–1059. [Google Scholar] [CrossRef] [PubMed]
- Mason, O.U.; Scott, N.M.; Gonzalez, A.; Robbins-Pianka, A.; Bælum, J.; Kimbrel, J.; Bouskill, N.J.; Prestat, E.; Borglin, S.; Joyner, D.C.; et al. Metagenomics reveals sediment microbial community response to Deepwater Horizon oil spill. ISME J. 2014, 8, 1464–1475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scholin, C.S. What are “ecogenomic sensors”? A review and thoughts for the future. Ocean Sci. 2010, 6, 51–60. [Google Scholar] [CrossRef]
- Scholin, C.S.; Doucette, G.; Jensen, S.; Roman, B.; Pargett, D.; Marin, R., III; Preston, C.; Jones, W.; Feldman, J.; Everlove, C.; et al. Remote detection of marine microbes, small invertebrates, harmful algae, and biotoxins using the environmental sample processor (ESP). Oceanography 2009, 22, 158–161. [Google Scholar] [CrossRef]
- Ussler, W.; Preston, C.; Tavormina, P.; Pargett, D.; Jensen, S.; Roman, B.; Marin, R.; Shah, S.R.; Girguis, P.R.; Birch, J.M. Autonomous application of quantitative PCR in the deep sea: In situ surveys of aerobic methanotrophs using the deep-sea environmental sample processor. Environ. Sci. Technol. 2013, 47, 9339–9346. [Google Scholar] [CrossRef] [PubMed]
- Manley, J.; Willcox, S. The wave glider: A persistent platform for ocean science. In Proceedings of the IEEE OCEANS 2010, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5.
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The autonomous underwater glider “Spray”. IEEE J. Ocean. Eng. 2000, 26, 437–446. [Google Scholar] [CrossRef]
- Mason, R.; Burdick, J.W. Experiments in carangiform robotic fish locomotion. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA ’00, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 428–435.
- Waldmann, C.; Bergenthal, M. CMOVE—A versatile underwater vehicle for seafloor studies. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–3.
- Greiner, H.; Shectman, A.; Won, C.; Elsley, R.; Beith, P. Autonomous legged underwater vehicles for near land warfare. In Proceedings of the 1996 Symposium on Autonomous Underwater Vehicle Technology, Monterey, CA, USA, 2–6 June 1996; pp. 41–48.
- Schwendner, J.; Joyeux, S.; Kirchner, F. Using Embodied Data for Localisation and Mapping. J. Field Robot. 2014, 31, 263–295. [Google Scholar] [CrossRef]
- Kapaldo, A.J. Gyroscope Calibration and Dead Reckoning for an Autonomous Underwater Vehicle. Master’s Thesis, University of Virginia, Charlottesville, VA, USA, 2005. [Google Scholar]
- Bellingham, J.G.; Consi, T.R.; Tedrow, U.; Di Massa, D. Hyberbolic Acoustic Navigation for Underwater Vehicles: Implementation and Demonstration; Sea Grant College Program: Massachusetts Institute of Technology, MA, USA, 1993. [Google Scholar]
- Peyronnet, J.P. Posidonia 6000: A new long range highly accurate ultra-short base line positioning system. In Proceedings of the OCEANS ’98, Nice, France, 28 September–1 October 1998; pp. 1721–1727.
- Eustice, R.M.; Singh, H.; Leonard, J.J. Exactly sparse delayed-state filters for view-based SLAM. IEEE Trans. Robot. 2006, 22, 1100–1114. [Google Scholar] [CrossRef]
- Mahon, I.; Williams, S.; Pizarro, O.; Johnson-Roberson, M. Efficient view-based SLAM using visual loop closures. IEEE Trans. Robot. 2008, 24, 1002–1014. [Google Scholar] [CrossRef]
- Richmond, K. Real-Time Visual Mosaicking and Navigation on the Seafloor. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2009. [Google Scholar]
- Rauch, C.; Berghöfer, E.; Köhler, T.; Kirchner, F. Comparison of sensor-feedback prediction methods for robust behavior execution. In Advances in Artificial Intelligence; Springer: Berlin, Germany; Heidelberg, Germany, 2013; pp. 200–211. [Google Scholar]
- Castano, R.; Estlin, T.; Anderson, R.C.; Gaines, D.M.; Castano, A.; Bornstein, B.; Chouinard, C.; Judd, M. Oasis: Onboard autonomous science investigation system for opportunistic rover science. J. Field Robot. 2007, 24, 379–397. [Google Scholar] [CrossRef]
- Huntsberger, T.; Woodward, G. Intelligent autonomy for unmanned surface and underwater vehicles. In Proceedings of the OCEANS ’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–10.
- Kampmann, P.; Kirchner, F. Towards a fine manipulation system with tactile feedback for deep-sea environments. Robot. Auton. Syst. 2015, 67, 115–121. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Property | Rate | Precision | Range |
|---|---|---|---|---|
| XSens MTi Attitude and Heading Reference System | Attitude (R/P/Y) | 120 Hz | 0.5° (R/P) 1° (Y) | 360° |
| KVH DSP-3000 Single-Axis FOG | Yaw rate | 100 Hz | 1° to 6°/h−1 | 375° s−1 |
| Desert Star SSP-1 pressure sensor | Depth | 0.25 to 16 Hz | 0.1% RMS | 0 to 344 m |
| Desert Star SAM-1 acoustic modem | Telemetry | 23 bit·s−1 | - | 250 to 1000 m |
| Desert Star VLT-3 LBL transponder | XYZ position | 0.2 to 2 Hz | 0.15 m | 2000 m |
| Teledyne RDI Explorer DVL | Speed over ground | 12 Hz | 0.007 to 0.03 ms−1 | 0.3 to 80 m |
| Micron DST scanning sonar | Distance | 0.5 Hz | - | 2 to 75 m |
| Micron USBL transponder | Range/bearing | 0.12 Hz | 0.2 m, 3° | 150 to 500 m |
| 2 Bowtech LED 3200 | Illumination | 22 kHz PWM | 255 steps dimmable | - |
| 2 AVT GE1900C GigE-cameras | Ground image | 0 to 30 FPS | Full-HD (1920 × 1080) | - |
| 1 AVT GC1380HC GigE-camera | Front image | 0 to 30 FPS | HD (1360 × 1024) | - |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brandt, A.; Gutt, J.; Hildebrandt, M.; Pawlowski, J.; Schwendner, J.; Soltwedel, T.; Thomsen, L. Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research. J. Mar. Sci. Eng. 2016, 4, 36. https://doi.org/10.3390/jmse4020036
Brandt A, Gutt J, Hildebrandt M, Pawlowski J, Schwendner J, Soltwedel T, Thomsen L. Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research. Journal of Marine Science and Engineering. 2016; 4(2):36. https://doi.org/10.3390/jmse4020036
Chicago/Turabian StyleBrandt, Angelika, Julian Gutt, Marc Hildebrandt, Jan Pawlowski, Jakob Schwendner, Thomas Soltwedel, and Laurenz Thomsen. 2016. "Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research" Journal of Marine Science and Engineering 4, no. 2: 36. https://doi.org/10.3390/jmse4020036
APA StyleBrandt, A., Gutt, J., Hildebrandt, M., Pawlowski, J., Schwendner, J., Soltwedel, T., & Thomsen, L. (2016). Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research. Journal of Marine Science and Engineering, 4(2), 36. https://doi.org/10.3390/jmse4020036