A Marine Information System for Environmental Monitoring: ARGO-MIS




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
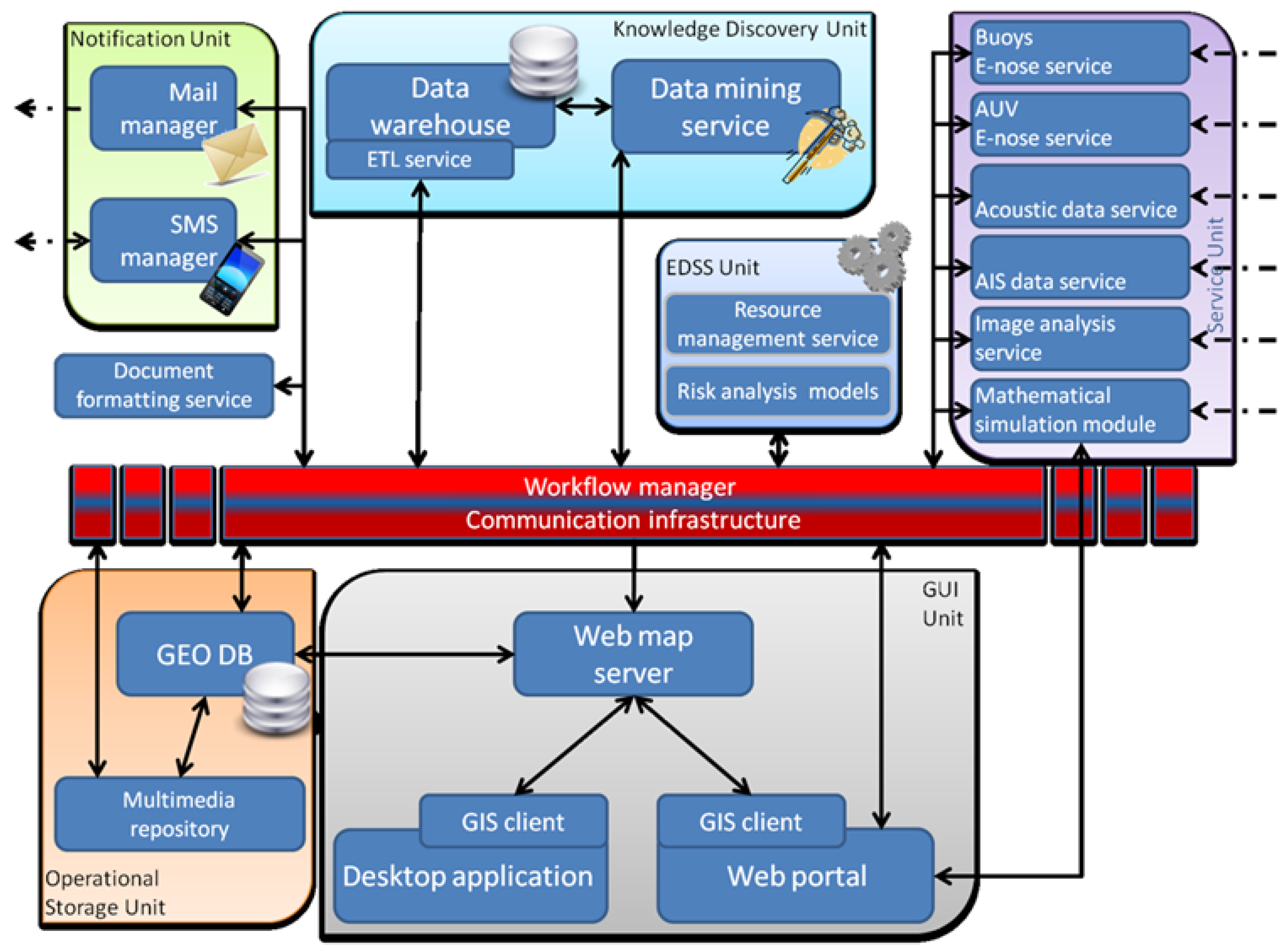
2. Architectural Design
2.1. MIS Architecture
- Service Unit,
- Operational Storage Unit,
- Knowledge Discovery Unit,
- Notification Unit,
- Graphical User Interface Unit,
- Environmental Decision Support System Unit.
2.2. Service Unit
2.3. Operational Storage Unit
2.4. Knowledge Discovery Unit
2.5. Notification Unit
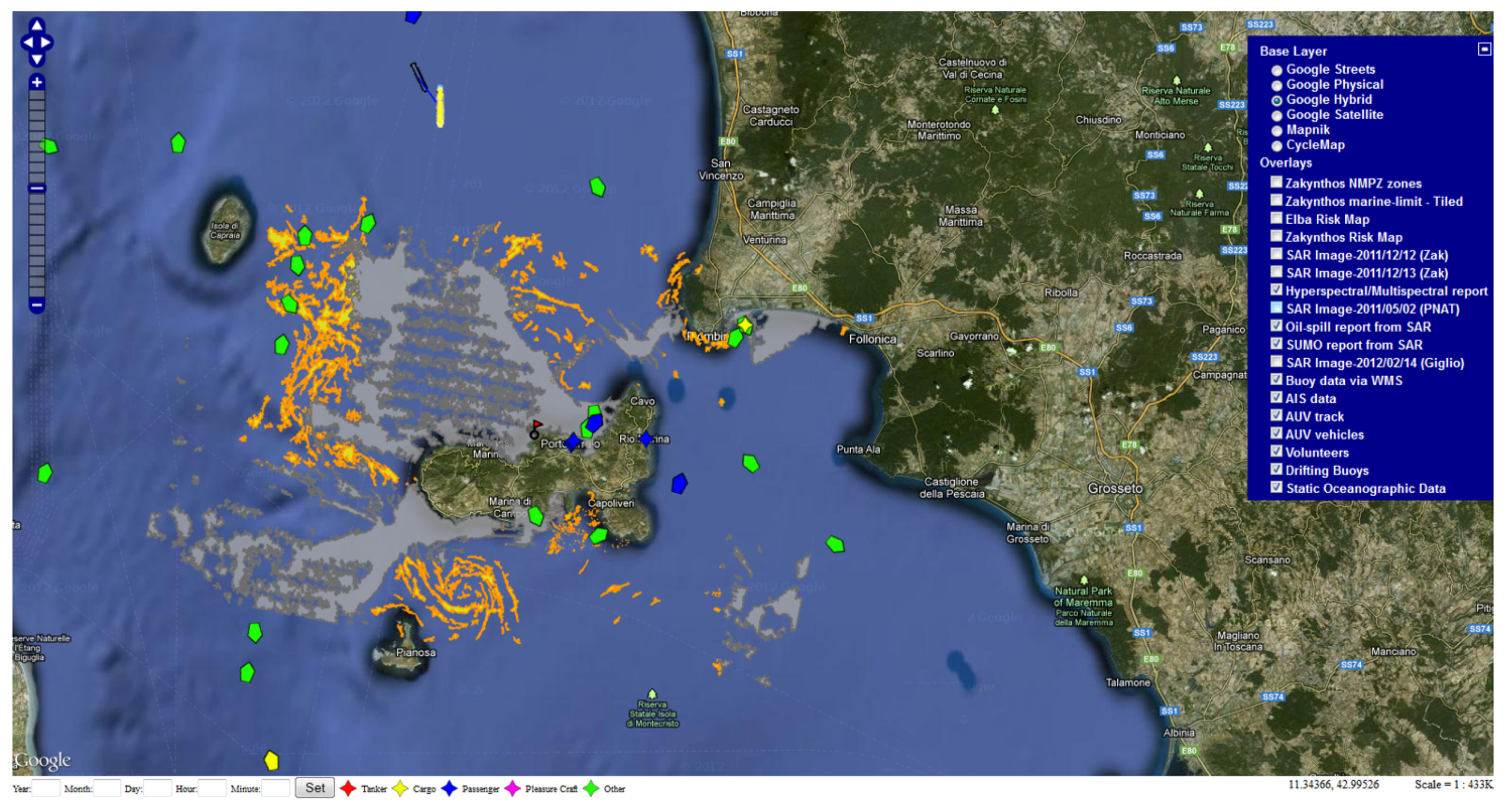
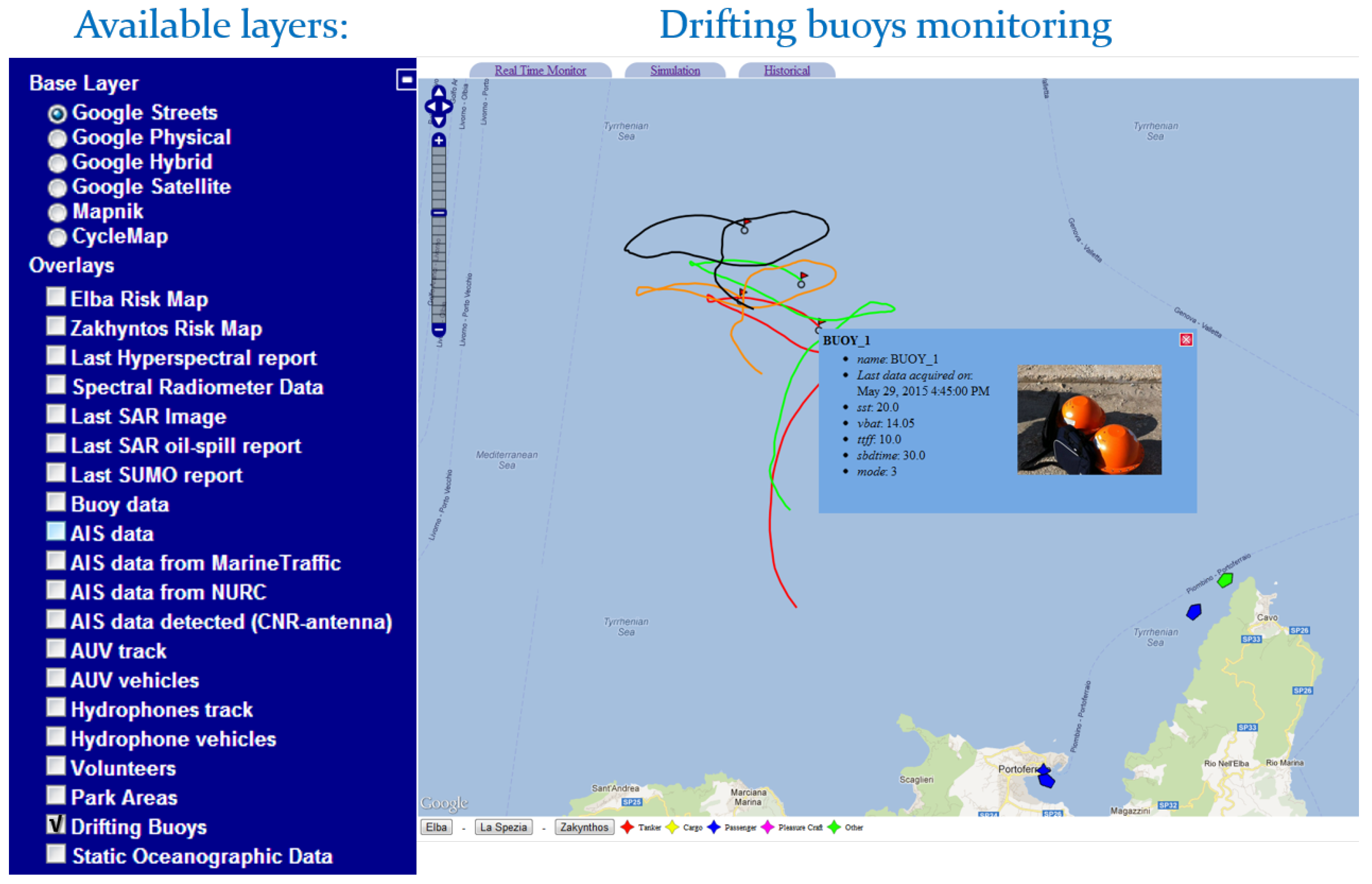
2.6. GUI Unit
2.7. Environmental Decision Support System
3. Sensors
3.1. Space-Borne SAR Imaging and Analysis
3.2. Ground Based Monitoring Technology (GBMT)
3.3. Hyperspectral Imaging and Analysis
3.4. Electronic Noses for Hydrocarbons and Oil Spill Detection
3.5. Underwater Monitoring Technology
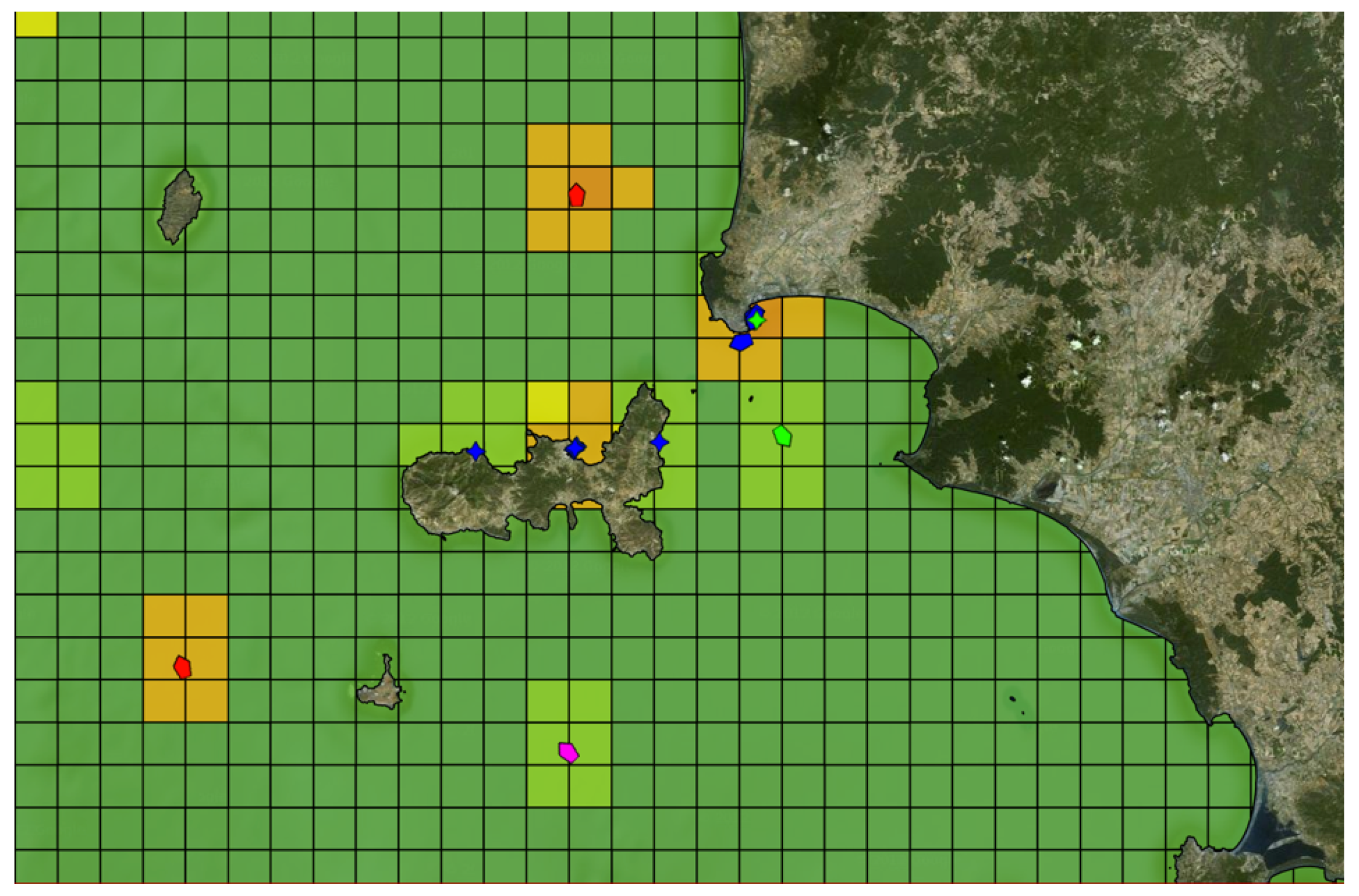
4. Near Real-Time Risk Assessment
- Hazard identification,
- Risk assessment,
- Risk evaluation,
- Intervention decision-making.
Risk Assessment Computation
5. Proactive Services for Marine Monitoring
6. Results
7. Discussion
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| ASV | Autonomous Surface Vehicles |
| AUV | Autonomous Underwater Vehicle |
| GIS | Geographic Information System |
| GT | Gross Tonnage |
| GUI | Graphical User Interface |
| HNS | Hazard Noxious Substances |
| KDE | Kernel Density Estimation |
| LSF | Laser Fluorosensors |
| MWR | Microwave Radiometers |
| OLAP | Online Analytical Processing |
| SAR | Synthetic Aperture Radar |
| SLAR | Side-Looking Airborne Radar |
| VOCs | Volatile Chemicals |
References
- Kelly, R.A.; Jakeman, A.J.; Barreteau, O.; Borsuk, M.E.; ElSawah, S.; Hamilton, S.H.; Henriksen, H.J.; Kuikka, S.; Maier, H.R.; Rizzoli, A.E.; et al. Selecting among five common modelling approaches for integrated environmental assessment and management. Environ. Model. Softw. 2013, 47, 159–181. [Google Scholar] [CrossRef]
- Nevalainen, M.; Helle, I.; Vanhatalo, J. Preparing for the unprecedented—Towards quantitative oil risk assessment in the Arctic marine areas. Mar. Pollut. Bull. 2017, 114, 90–101. [Google Scholar] [CrossRef] [PubMed]
- Abascal, A.J.; Castanedo, S.; Medina, R.; Liste, M. Analysis of the reliability of a statistical oil spill response model. Mar. Pollut. Bull. 2010, 60, 2099–2110. [Google Scholar] [CrossRef] [PubMed]
- Kinerson, R.S.; Kittle, J.L.; Duda, P.B. BASINS: Better assessment science integrating point and nonpoint sources. In Decision Support Systems for Risk-Based Management of Contaminated Sites; Springer: New York, NY, USA, 2009; pp. 1–24. [Google Scholar]
- Paine, R.T.; Ruesink, J.L.; Sun, A.; Soulanille, E.L.; Wonham, M.J.; Harley, C.D.; Brumbaugh, D.R.; Secord, D.L. Trouble on oiled waters: Lessons from the Exxon Valdez oil spill. Annu. Rev. Ecol. Syst. 1996, 27, 197–235. [Google Scholar] [CrossRef]
- Balseiro, C.; Carracedo, P.; Gómez, B.; Leitao, P.; Montero, P.; Naranjo, L.; Penabad, E.; Pérez-Muñuzuri, V. Tracking the Prestige oil spill: An operational experience in simulation at MeteoGalicia. Weather 2003, 58, 452–458. [Google Scholar] [CrossRef]
- Fingas, M. Oil Spill Science and Technology; Gulf Professional Publishing: Cambridge, MA, USA, 2016. [Google Scholar]
- Ferraro, G.; Meyer-Roux, S.; Muellenhoff, O.; Pavliha, M.; Svetak, J.; Tarchi, D.; Topouzelis, K. Long term monitoring of oil spills in European seas. Int. J. Remote Sens. 2009, 30, 627–645. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Guo, W.; Wang, Y. A numerical oil spill model based on a hybrid method. Mar. Pollut. Bull. 2009, 58, 726–734. [Google Scholar] [CrossRef] [PubMed]
- Jordi, A.; Ferrer, M.; Vizoso, G.; Orfila, A.; Basterretxea, G.; Casas, B.; Alvarez, A.; Roig, D.; Garau, B.; Martínez, M. Scientific management of Mediterranean coastal zone: A hybrid ocean forecasting system for oil spill and search and rescue operations. Mar. Pollut. Bull. 2006, 53, 361–368. [Google Scholar] [CrossRef] [PubMed]
- Cortés, U.; Sànchez-Marrè, M.; Ceccaroni, L.; R-Roda, I.; Poch, M. Artificial intelligence and environmental decision support systems. Appl. Intell. 2000, 13, 77–91. [Google Scholar] [CrossRef]
- Fedra, K.; Winkelbauer, L. A hybrid expert system, GIS, and simulation modeling for environmental and technological risk management. Comput.-Aided Civ. Infrastruct. Eng. 2002, 17, 131–146. [Google Scholar] [CrossRef]
- Janeiro, J.; Zacharioudaki, A.; Sarhadi, E.; Neves, A.; Martins, F. Enhancing the management response to oil spills in the Tuscany Archipelago through operational modelling. Mar. Pollut. Bull. 2014, 85, 574–589. [Google Scholar] [CrossRef] [PubMed]
- Kimball, R. The Data Warehouse Lifecycle Toolkit; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- U.S. Environment Protection Agency. BASINS 4.1 (Better Assessment Science Integrating Point and Non-Point Sources) Modeling Framework; National Exposure Research Laboratory, RTP: Durham, NC, USA, 2015. Available online: https://www.epa.gov/exposure-assessment-models/basins (accessed on 22 November 2017).
- Bourgeois, W.; Hogben, P.; Pike, A.; Stuetz, R. Development of a sensor array based measurement system for continuous monitoring of water and wastewater. Sens. Actuators B Chem. 2003, 88, 312–319. [Google Scholar] [CrossRef]
- Persaud, K.C.; Wareham, P.; Pisanelli, A.M.; Scorsone, E. “Electronic Nose”—A New Monitoring Device for Environmental Applications (S & M 0613). Sens. Mater. 2005, 17, 355. [Google Scholar]
- Lukowiak, A.; Maciejewska, M.; Szczurek, A.; Maruszewski, K. Application of a titania thin film for the discrimination between diesel fuel and heating oil. Thin Solid Films 2007, 515, 7005–7010. [Google Scholar] [CrossRef]
- Alpers, W.; Hühnerfuss, H. The damping of ocean waves by surface films: A new look at an old problem. J. Geophys. Res. Oceans 1989, 94, 6251–6265. [Google Scholar] [CrossRef]
- Hovland, H.A.; Johannessen, J.A.; Digranes, G. Slick detection in SAR images. In Proceedings of the IGARSS’94 Surface and Atmospheric Remote Sensing: Technologies, Data Analysis and Interpretation International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 8–12 August 1994; Volume 4, pp. 2038–2040. [Google Scholar]
- Clark, R.B.; Frid, C.; Attrill, M. Marine Pollution; Clarendon Press: Oxford, UK, 1989; Volume 4. [Google Scholar]
- International Maritime Organisation (IMO). Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS), as Amended by ITU-1371. Resolution A.917(22); London, 2001. Available online: https://www.navcen.uscg.gov/pdf/AIS/IMO_A_917(22)_AIS_OPS_Guidelines.pdf (accessed on 20 January 2017).
- Brekne, T.M.; Holmemo, S.; Engen, F.; Skeie, G.M. Norwegian Clean Seas Association for Operating Companies (NOFO)—Research and Development Program for Next Generation Arctic Recovery Equipment. In Proceedings of the Interspill Conference 2004, Trondheim, Norway, 14–17 June 2004. [Google Scholar]
- Nieto-Borge, J.C.; Mata-Moya, D.; Jarabo-Amores, P.; Reichert, K.; Hessner, K. Application of conventional marine radars for measuring ocean wave fields in shallow water conditions. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 4338–4341. [Google Scholar]
- Van der Meer, F.D.; De Jong, S.M. Imaging Spectrometry: Basic Principles and Prospective Applications; Springer Science & Business Media: Amsterdam, The Netherlands, 2011; Volume 4, pp. xxi–xxxiii. [Google Scholar]
- Lammoglia, T.; de Souza Filho, C.R. Spectroscopic characterization of oils yielded from Brazilian offshore basins: Potential applications of remote sensing. Remote Sens. Environ. 2011, 115, 2525–2535. [Google Scholar] [CrossRef]
- Andreou, C.; Karathanassi, V.; Kolokoussis, P. Spectral library for oil types. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011; pp. 10–15. [Google Scholar]
- Andreou, C.; Karathanassi, V. Estimation of the number of endmembers using robust outlier detection method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 247–256. [Google Scholar] [CrossRef]
- Andreou, C.; Karathanassi, V. Endmember detection in marine environment with oil spill event. In Proceedings of the SPIE 8180, Image and Signal Processing for Remote Sensing XVII, Prague, Czech Republic, 27 October 2011; Volume 8180, p. 81800P. [Google Scholar]
- Andreou, C.; Karathanassi, V. New automated method for estimating the number of endmembers in hyperspectral images. In Proceedings of the 2012 4th Workshop on Hyperspectral Image and Signal Processing (WHISPERS), Shanghai, China, 4–7 June 2012; pp. 1–4. [Google Scholar]
- SOLMAR Project. Available online: http://www.solmar.nurc.nato.int (accessed on 1 January 2017).
- Stommel, H. The slocum mission. Oceanography 1989, 2, 22–25. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Alvarez, A.; Garau, B.; Caiti, A. Combining networks of drifting profiling floats and gliders for adaptive sampling of the Ocean. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 157–162. [Google Scholar]
- Gasparotti, C.; Rusu, E. Methods for the risk assessment in maritime transportation in the Black Sea basin. J. Environ. Prot. Ecol. 2012, 13, 1751–1759. [Google Scholar]
- Vergara, L.; Soriano, A.; Safont, G.; Salazar, A. On the fusion of non-independent detectors. Digit. Signal Process. 2016, 50, 24–33. [Google Scholar] [CrossRef]
- Martinelli, M.; Moroni, D.; Pieri, G.; Tampucci, M. A proactive gis infrastructure for environmental monitoring. In Proceedings of the Seventeenth International Water Technology Conference (IWTC17), Istanbul, Turkey, 5–7 November 2013. [Google Scholar]
- Tampucci, M.; Martinelli, M.; Moroni, D.; Pieri, G.; Salvetti, O.; Villa, P. A Proactive System for Oil Spills and Marine Environment Monitoring. Bollettino di Geofisica Teorica e Applicata 2013, 54, 222–223. [Google Scholar]
- Laxhammar, R.; Falkman, G.; Sviestins, E. Anomaly detection in sea traffic-a comparison of the gaussian mixture model and the kernel density estimator. In Proceedings of the 12th International Conference on Information Fusion (FUSION’09), Seattle, WA, USA, 6–9 July 2009; pp. 756–763. [Google Scholar]
- Moroni, D.; Pieri, G.; Salvetti, O.; Tampucci, M.; Domenici, C.; Tonacci, A. Sensorized buoy for oil spill early detection. Methods Oceanogr. 2016, 17, 221–231. [Google Scholar] [CrossRef]
- Schwartz, G.; Kourti, N. Algorithm Development Searching for Unidentified Maritime Objects (SUMO). Jt. Res. Centre Tech. Note I 2001, 1, 1–11. [Google Scholar]
- Moroni, D.; Pieri, G.; Tampucci, M.; Salvetti, O. A proactive system for maritime environment monitoring. Mar. Pollut. Bull. 2016, 102, 316–322. [Google Scholar] [CrossRef] [PubMed]
- ARGOMARINE Project. FP7-Transport-234096. Available online: http://www.argomarine.eu/ (accessed on 31 December 2017).







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pieri, G.; Cocco, M.; Salvetti, O. A Marine Information System for Environmental Monitoring: ARGO-MIS. J. Mar. Sci. Eng. 2018, 6, 15. https://doi.org/10.3390/jmse6010015
Pieri G, Cocco M, Salvetti O. A Marine Information System for Environmental Monitoring: ARGO-MIS. Journal of Marine Science and Engineering. 2018; 6(1):15. https://doi.org/10.3390/jmse6010015
Chicago/Turabian StylePieri, Gabriele, Michele Cocco, and Ovidio Salvetti. 2018. "A Marine Information System for Environmental Monitoring: ARGO-MIS" Journal of Marine Science and Engineering 6, no. 1: 15. https://doi.org/10.3390/jmse6010015
APA StylePieri, G., Cocco, M., & Salvetti, O. (2018). A Marine Information System for Environmental Monitoring: ARGO-MIS. Journal of Marine Science and Engineering, 6(1), 15. https://doi.org/10.3390/jmse6010015