A Semi-Empirical Prediction Method for Broadband Hull-Pressure Fluctuations and Underwater Radiated Noise by Propeller Tip Vortex Cavitation †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
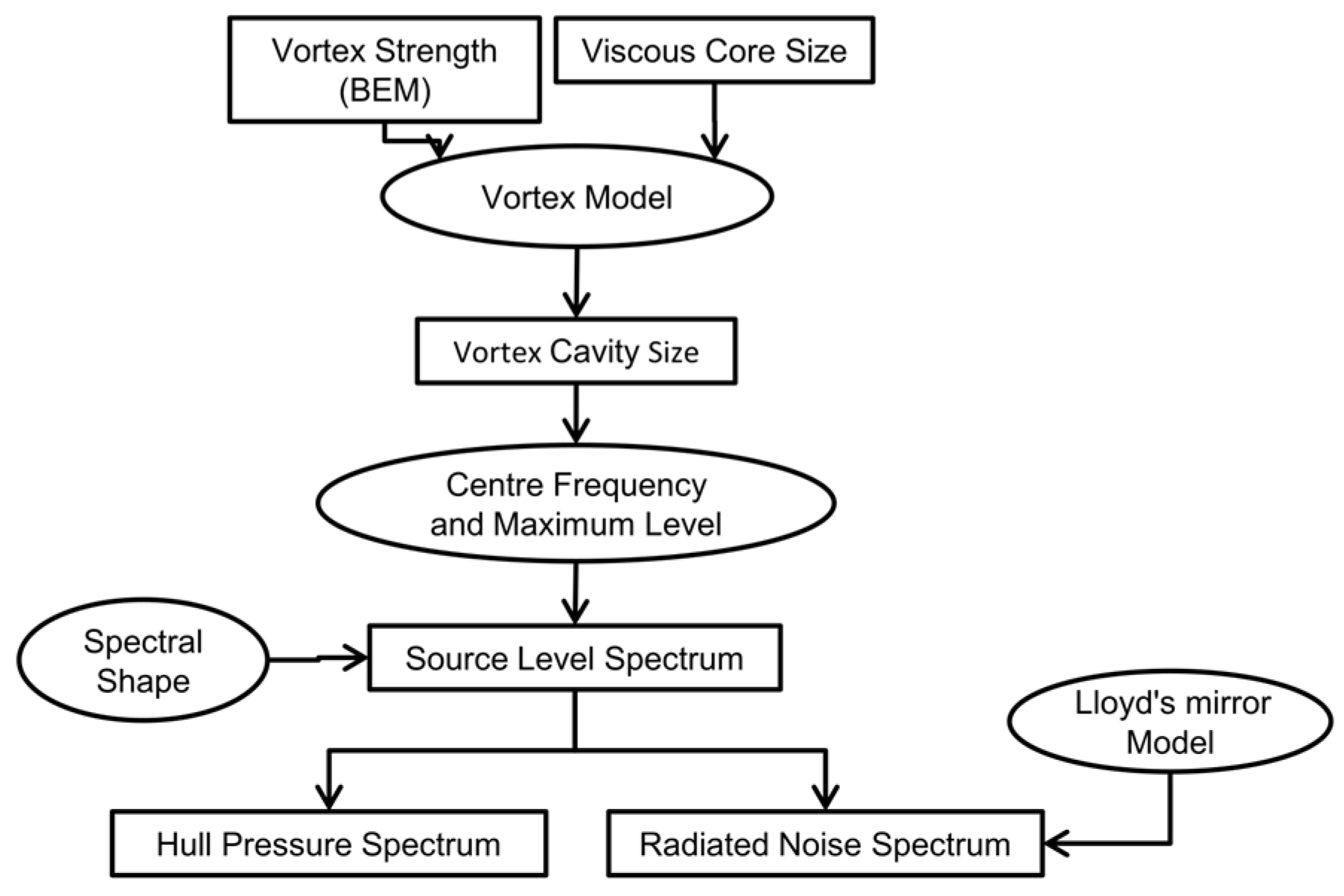
2. Prediction of the Maximum Source Level
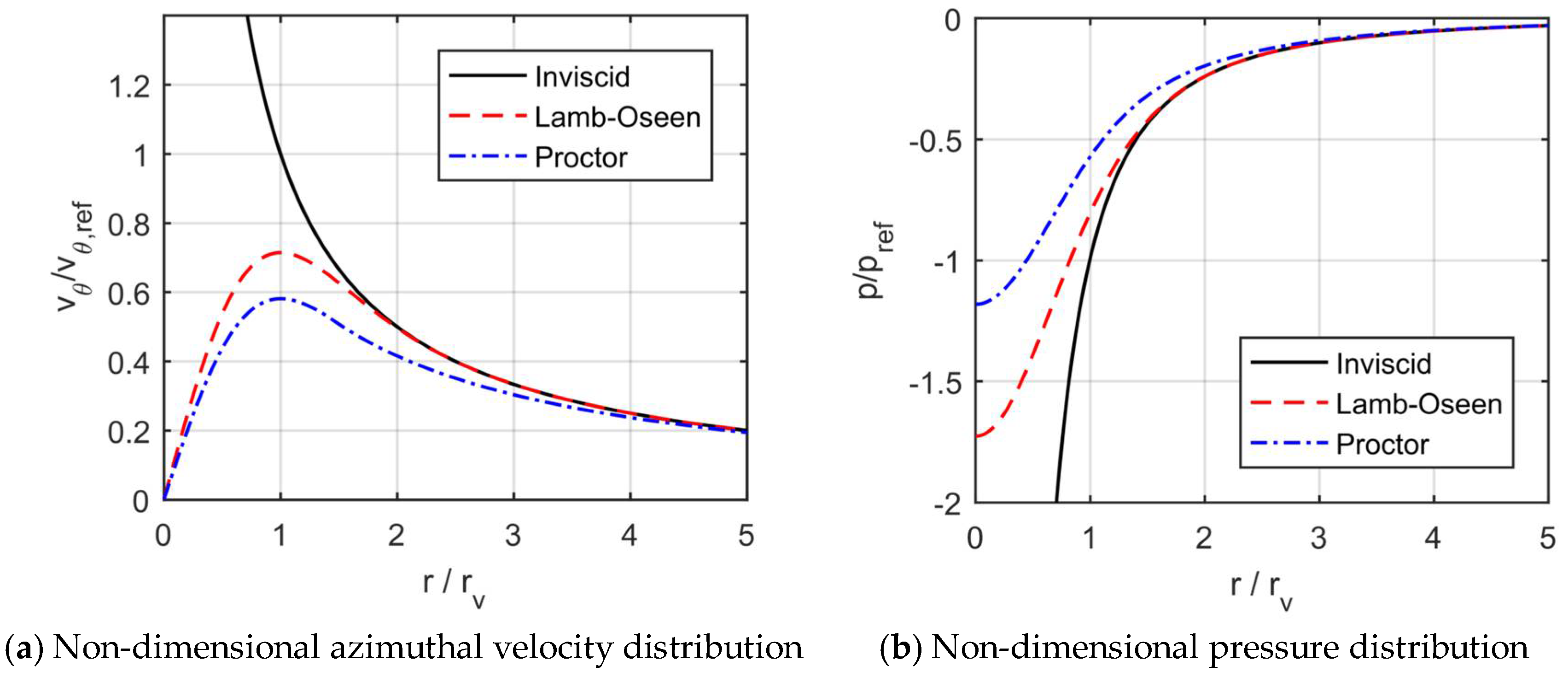
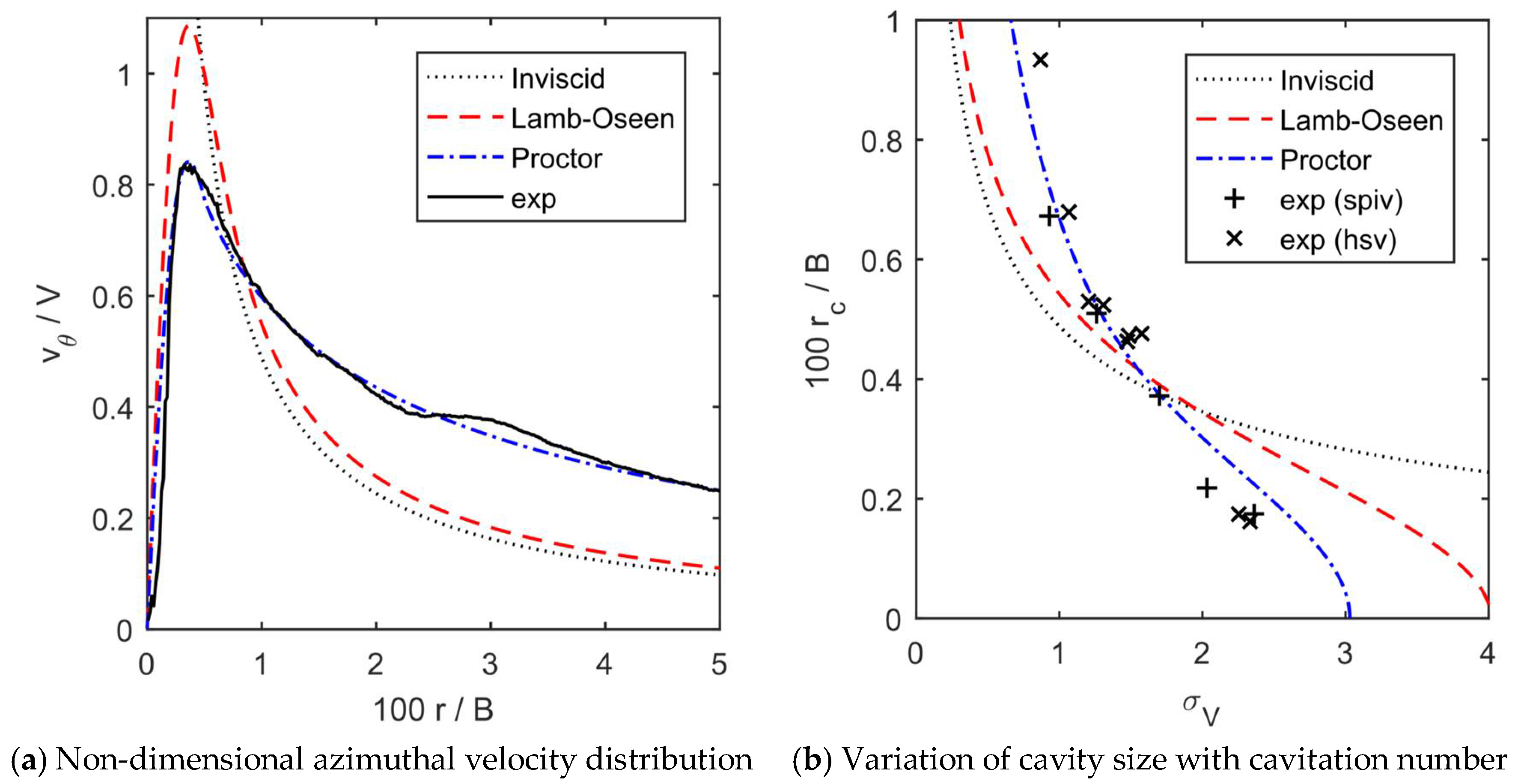
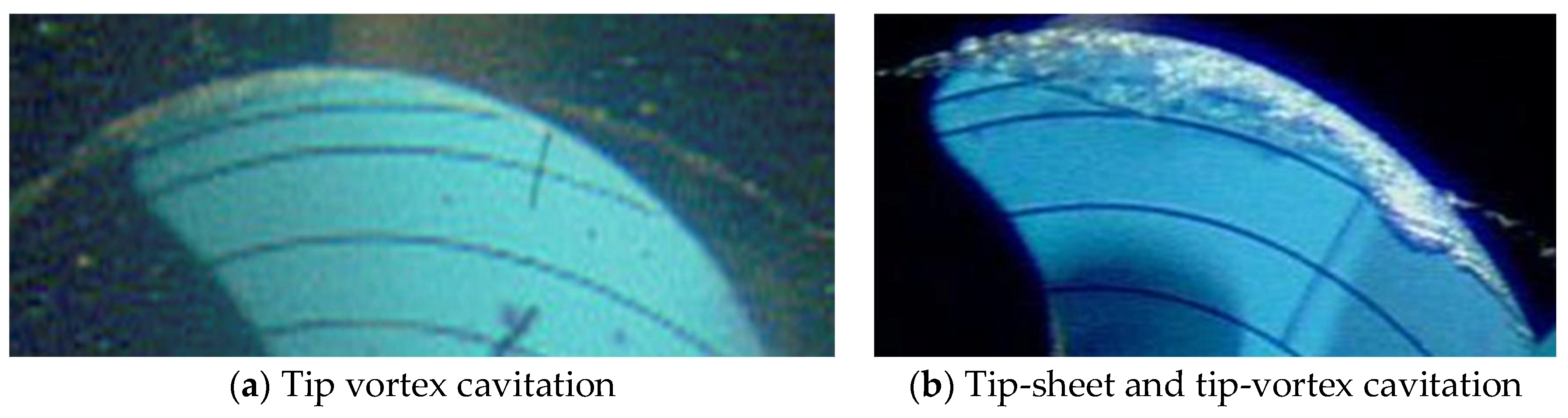
2.1. Vortex Models
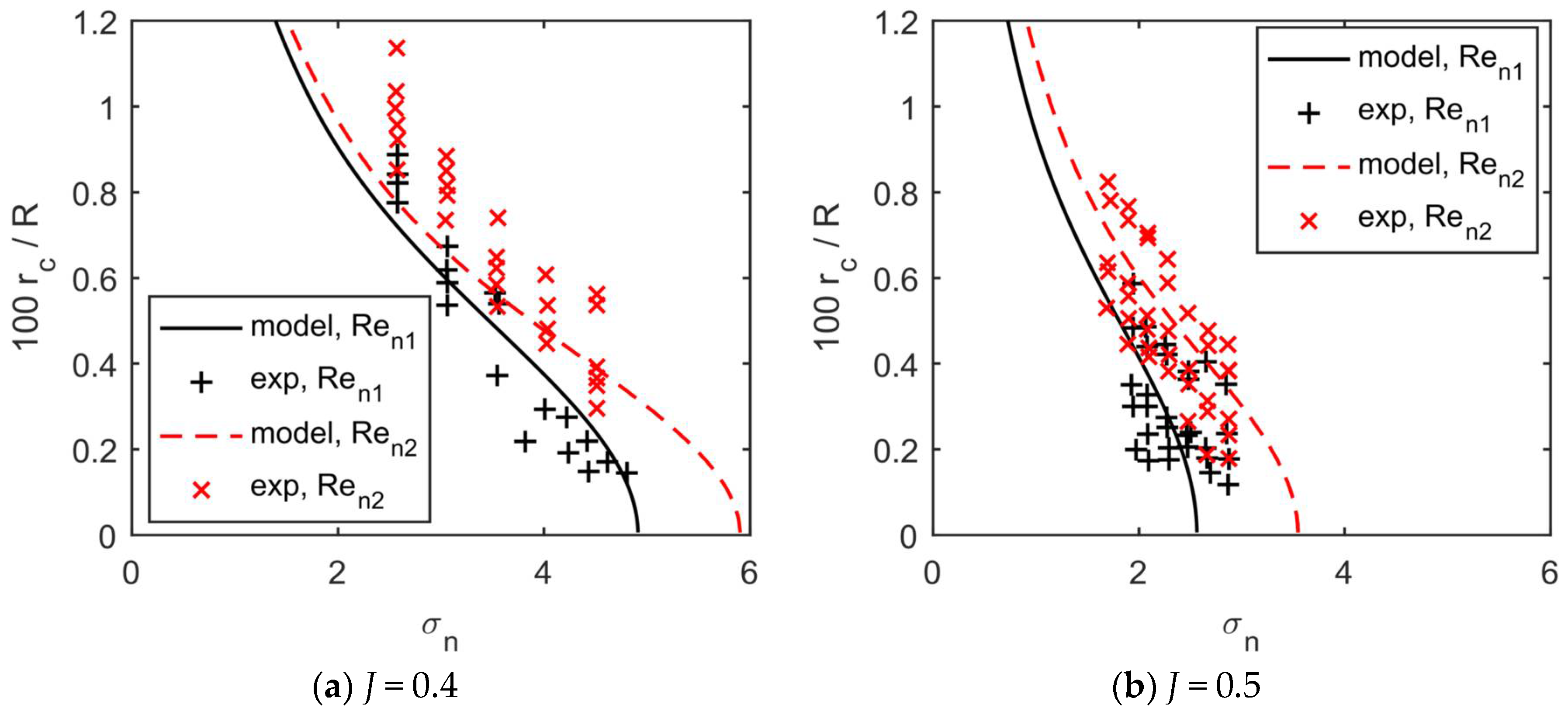
2.2. Prediction of Cavity Size
2.3. Prediction of Source Levels
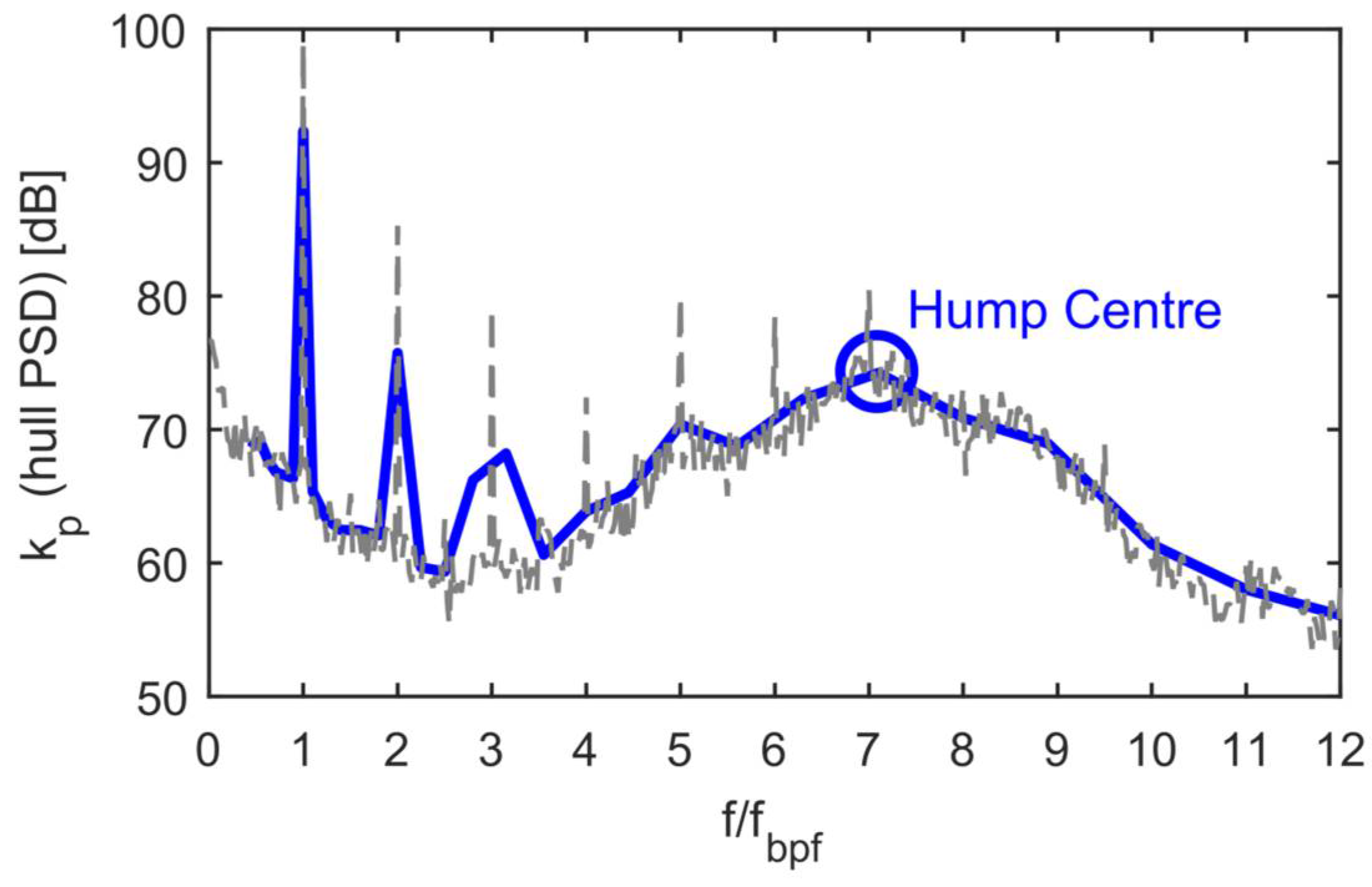
3. Shape of the Spectrum
3.1. Source Level
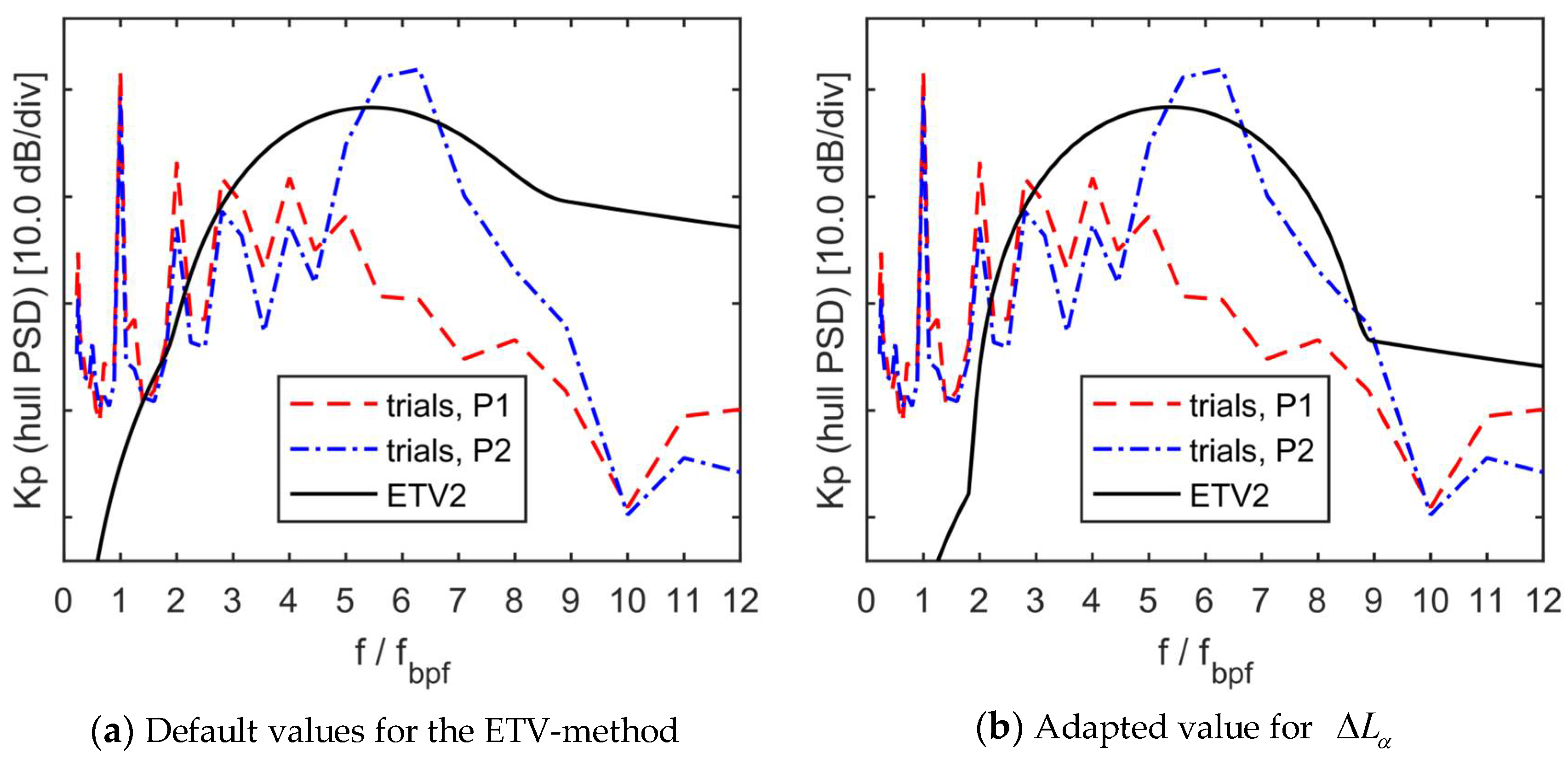
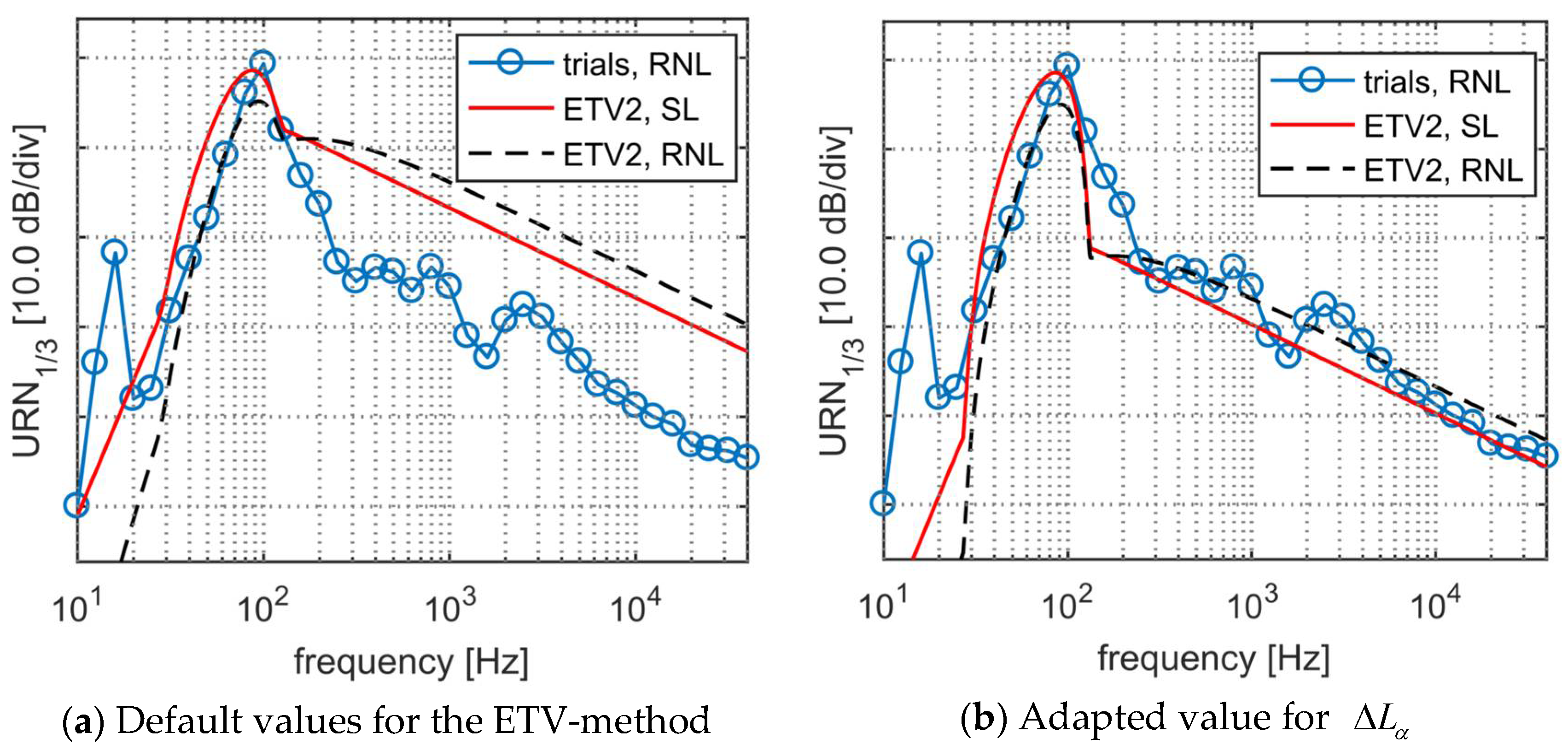
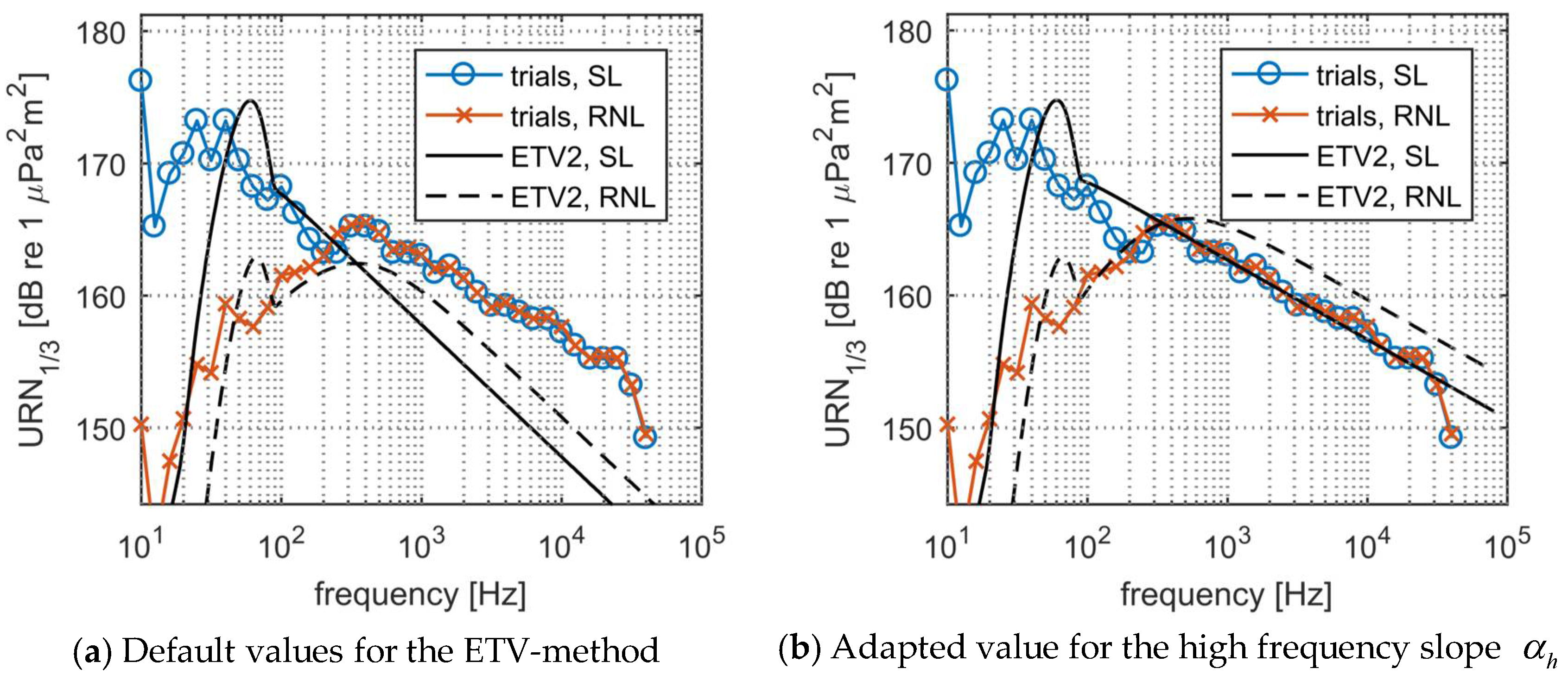
3.2. Hull-Pressure and URN Spectra
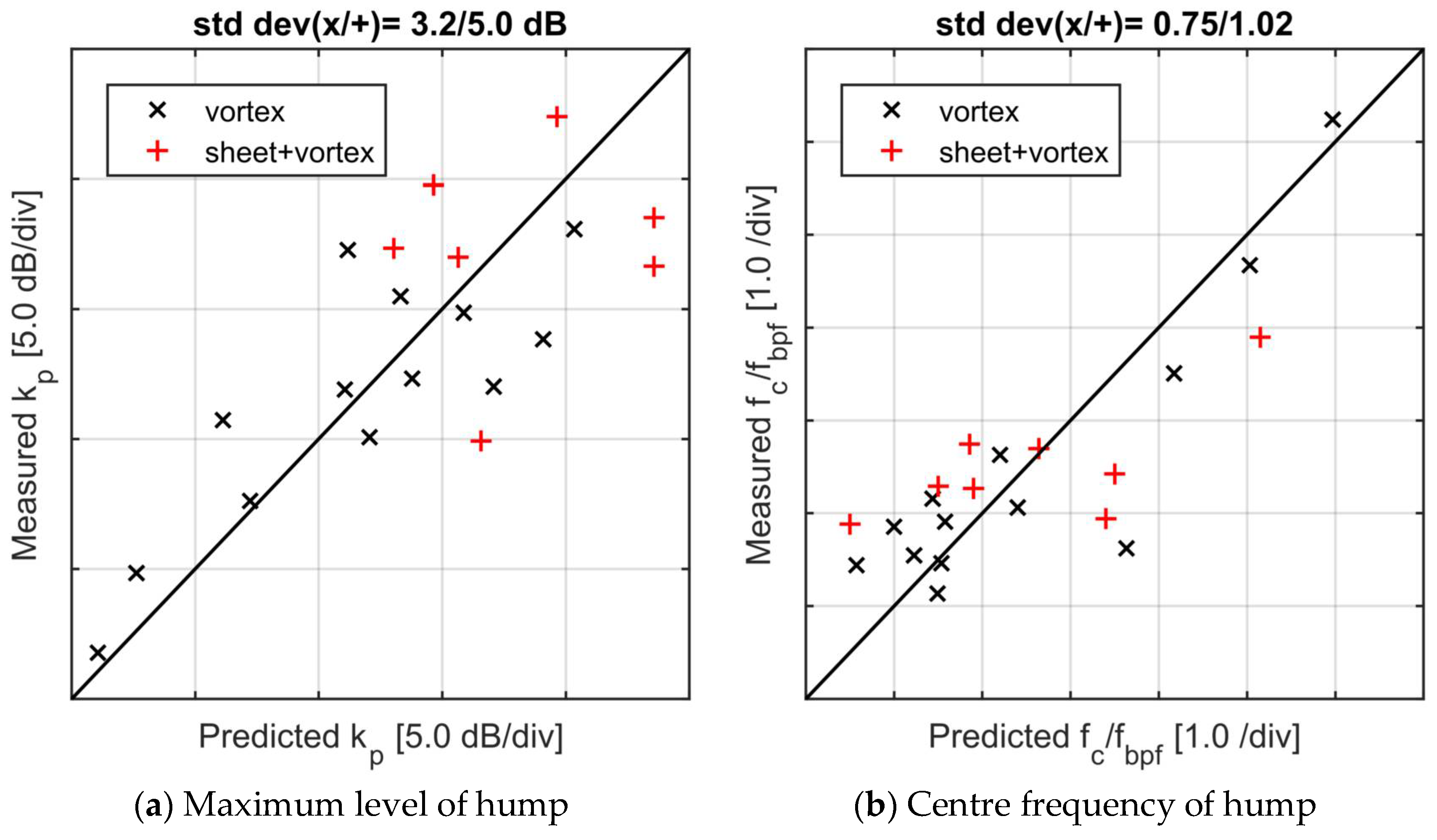
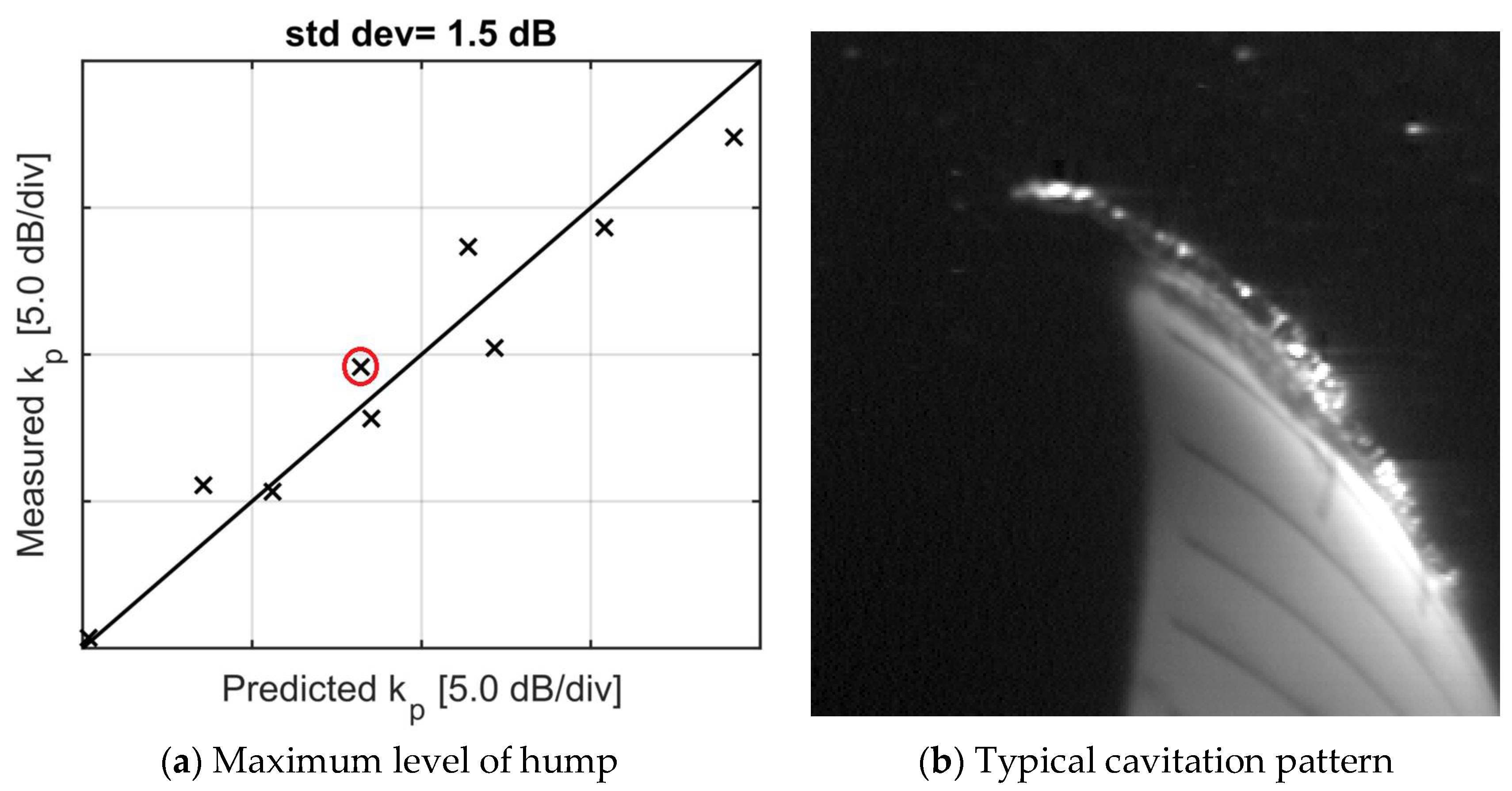
4. Comparison of Predicted and Measured Hull Pressures and URN
5. Discussion
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Brubakk, E.; Smogeli, H. QE2 from turbine to diesel—Consequences for noise and vibration. In Proceedings of the IMAS Conference on the Design and Development of Passenger Ships, London, UK, 18–20 May 1988. [Google Scholar]
- Carlton, J.S. Broadband cavitation excitation in ships. Ships Offshore Struct. 2015, 10, 302–307. [Google Scholar] [CrossRef]
- Bosschers, J. Investigation of hull pressure fluctuations generated by cavitating vortices. In Proceedings of the First International Symposium on Marine Propulsors (SMP’09), Trondheim, Norway, 24–29 June 2009. [Google Scholar]
- Pennings, P.C.; Bosschers, J.; Westerweel, J.; van Terwisga, T.J.C. Dynamics of isolated vortex cavitation. J. Fluid Mech. 2015, 778, 288–313. [Google Scholar] [CrossRef]
- Bosschers, J. On the relation between tonal and broadband content of hull pressure spectra due to cavitating ship propellers. In Proceedings of the 9th International Conference on Cavitation (CAV2015), Lausanne, Switzerland, 6–10 December 2015. [Google Scholar]
- Newman, M.; Abrahamsen, K. Measurement of underwater noise. In Proceedings of the Ship Noise and Vibration Conference, London, UK, 28–30 June 2007. [Google Scholar]
- Foeth, E.J.; Bosschers, J. Localization and source-strength estimation of propeller cavitation noise using hull-mounted pressure transducers. In Proceedings of the 31st Symposium on Naval Hydrodynamics, Monterey, CA, USA, 11–16 September 2016. [Google Scholar]
- Van Wijngaarden, H.C.J. Prediction of Propeller-Induced Hull-Pressure Fluctuations; Delft University of Technology: Delft, The Netherlands, 2011. [Google Scholar]
- Johannsen, C.; van Wijngaarden, E.; Lücke, T.; Streckwall, H.; Bosschers, J. Investigation of hull pressure pulses, making use of two large scale cavitation test facilities. In Proceedings of the 8th International Symposium on Cavitation CAV2012, Singapore, 13–16 August 2012. [Google Scholar]
- Bosschers, J.; Lafeber, F.H.; de Boer, J.; Bosman, R.; Bouvy, A. Underwater radiated noise measurements with a silent towing carriage in the Depressurized Wave Basin. In Proceedings of the 3rd International Conference on Advanced Measurement Technology for the maritime industry (AMT’13), Gdansk, Poland, 17–18 September 2013. [Google Scholar]
- Tani, G.; Viviani, M.; Hallander, J.; Johansson, T.; Rizzuto, E. Propeller underwater radiated noise: A comparison between model scale measurements in two different facilities and full scale measurements. Appl. Ocean Res. 2016, 56, 48–66. [Google Scholar] [CrossRef]
- Lafeber, F.H.; Bosschers, J. Validation of computational and experimental prediction methods for the underwater radiated noise of a small research vessel. In Proceedings of the PRADS2016, Copenhagen, Denmark, 4–8 September 2016. [Google Scholar]
- Seol, H.; Suh, J.; Lee, S. Development of hybrid method for the prediction of underwater propeller noise. J. Sound Vib. 2005, 288, 345–360. [Google Scholar] [CrossRef]
- Bosschers, J.; Vaz, G.; Starke, A.R.; van Wijngaarden, E. Computational analysis of propeller sheet cavitation and propeller-ship interaction. In Proceedings of the RINA MARINE CFD Conference, Southampton, UK, 26–27 March 2008. [Google Scholar]
- Salvatore, F.; Testa, C.; Greco, L. Coupled hydrodynamics–Hydroacoustics BEM modelling of marine propellers operating in a Wakefield. In Proceedings of the First International Symposium on Marine Propulsors (SMP’09), Trondheim, Norway, 22–24 June 2009. [Google Scholar]
- Matusiak, J. Pressure and Noise Induced by a Cavitating Marine Screw Propeller; Helsinki University of Technology: Espoo, Finland, 1992. [Google Scholar]
- Brown, N.A. Thruster noise. In Proceedings of the Dynamic Positioning Conference of the Marine Technology Society, Houston, TX, USA, 12–13 October 1999. [Google Scholar]
- Ligneul, P. Theory of tip vortex cavitation noise of a screw propeller operating in a wake. In Proceedings of the 17th Symposium on Naval Hydrodynamics, The Hague, The Netherlands, 13–14 June 1988. [Google Scholar]
- Koronowicz, T.; Szantyr, J.A. Vortex cavitation as a source of high level acoustic pressure generated by ship propellers. Acta Acust. United Acust. 2006, 92, 175–177. [Google Scholar]
- Berger, S.; Gosda, R.; Scharf, M.; Klose, R.; Greitsch, L.; Abdel-Maksoud, M. Efficient Numerical Investigation of Propeller Cavitation Phenomena causing Higher-Order Hull Pressure Fluctuations. In Proceedings of the 31st Symposium on Naval Hydrodynamics, Monterey, CA, USA, 11–16 September 2016. [Google Scholar]
- Raestad, E. Tip Vortex Index—An Engineering Approach to Propeller Noise Prediction; Naval Architect; British Maritime Technology: London, UK, 1996; pp. 11–16. [Google Scholar]
- Yamada, T.; Sato, K.; Kawakita, C.; Oshima, A. Study on prediction of underwater radiated noise from propeller tip vortex cavitation. In Proceedings of the 9th International Conference on Cavitation (CAV2015), Lausanne, Switzerland, 6–10 December 2015. [Google Scholar]
- Vaz, G.; Bosschers, J. Modeling three dimensional sheet cavitation on marine propellers using a boundary element method. In Proceedings of the 6th International Symposium on Cavitation CAV2006, Wageningen, The Netherlands, 11–15 September 2006. [Google Scholar]
- Bosschers, J.; Willemsen, C.; Peddle, A.; Rijpkema, D. Analysis of ducted propellers by combining potential flow and RANS methods. In Proceedings of the 4th International Symposium on Marine Propulsors (SMP’15), Austin, TX, USA, 31 May–4 June 2015. [Google Scholar]
- Hommes, T.; Bosschers, J.; Hoeijmakers, H.W.M. Evaluation of the radial pressure distribution of vortex models and comparison with experimental data. In Proceedings of the 9th International Symposium on Cavitation (CAV2015), Lausanne, Switzerland, 6–10 December 2015. [Google Scholar]
- Bosschers, J. An analytical and semi-empirical model for the viscous flow around a vortex cavity. Int. J. Multiph. Flow 2018, in press. [Google Scholar] [CrossRef]
- Lamb, H. Hydrodynamics, 6th ed.; Cambridge University Press: Cambridge, UK, 1932. [Google Scholar]
- Proctor, F.; Ahmad, N.; Switzer, G.; Duparcmeur, F.L. Three-phased wake vortex decay. In Proceedings of the AIAA 2010-7991: AIAA Atmospheric and Space Environments Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Pennings, P.C.; Westerweel, J.; van Terwisga, T.J.C. Flow field measurement around vortex cavitation. Exp. Fluids 2015, 56, 1–13. [Google Scholar] [CrossRef]
- Kuiper, G. Cavitation Inception on Ship Propeller Models. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1981. [Google Scholar]
- Jessup, S.D. An Experimental Investigation of Viscous Aspects of Propeller Blade Flow; The Catholic University of America: Washington, DC, USA, 1989. [Google Scholar]
- McCormick, B.W. On cavitation produced by a vortex trailing from a lifting surface. J. Basic Eng. 1962, 84, 369–379. [Google Scholar] [CrossRef]
- Shen, Y.T.; Gowing, S.; Jessup, S. Tip vortex cavitation inception scaling for high Reynolds number applications. J. Fluids Eng. 2009, 131, 071301. [Google Scholar] [CrossRef]
- Hally, D. User ’s Guide for PIF-WAKE: The CRS PIF Wake Scaling Program for Single and Twin Screw Forms; Technical Report; DRDC Atlantic: Ottawa, ON, Canada, 2002. [Google Scholar]
- Fitzpatrick, H.M.; Strasberg, M. Hydrodynamic sources of sound. In Proceedings of the First Symposium on Naval Hydrodynamics, Washington, DC, USA, 24–28 September 1956; pp. 241–280. [Google Scholar]
- Lövik, A. Scaling of propeller cavitation noise. In Noise Sources in Ships; Nordforsk: Stockholm, Sweden, 1981. [Google Scholar]
- Blake, W.K. Mechanics of Flow-Induced Sound and Vibration; Academic Press Inc.: Cambridge, MA, USA, 1986. [Google Scholar]
- Ainslie, M. Principles of Sonar Performance; Springer: Berlin, Germany, 2010. [Google Scholar]
- Clay, C.C.; Medwin, H. Acoustical Oceanography: Principles and Applications; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1977. [Google Scholar]
- Strasberg, M. Propeller cavitation noise after 35 years of study. In Proceedings of the ASME Noise and Fluids Engineering, Altanta, GA, USA, 27 November–2 December 1977. [Google Scholar]
- Bark, G. Prediction of Propeller Cavitation Noise From Model Tests and Its Comparison With Full Scale Data. J. Fluids Eng. 1985, 107, 112–120. [Google Scholar] [CrossRef]
- Starke, B.; Bosschers, J. Analysis of scale effects in ship powering performance using a hybrid RANS-BEM approach. In Proceedings of the 26th Symposium on Naval Hydrodynamics, Gothenburg, Sweden, 26–31 August 2012. [Google Scholar]
- Rijpkema, D.; Starke, B.; Bosschers, J. Numerical simulation of propeller-hull interaction and determination of the effective wake field using a hybrid RANS-BEM approach. In Proceedings of the 3rd International Symposium on Marine Propulsors (SMP’13), Launceston, Australia, 5–8 May 2013. [Google Scholar]
- Lloyd, T.; Lafeber, F.H.; Bosschers, J. Investigation and validation of procedures for cavitation noise prediction from model-scale measurements. In Proceedings of the 32nd Symposium on Naval Hydrodynamics, Hamburg, Germany, 5–10 August 2018. [Google Scholar]
- Kipple, B. Southeast Alaska Cruise Ship Underwater Acoustic Noise; NSWCCD-71-TR-2002/S74; Naval Surface Warfare Center—Detachment Bremerton: Washington, DC, USA, 2002. [Google Scholar]
- Foeth, E.-J.; van Terwisga, T.; van Doorne, C. On the Collapse Structure of an Attached Cavity on a Three-Dimensional Hydrofoil. J. Fluids Eng. 2008, 130, 071303. [Google Scholar] [CrossRef]
- Bark, G.; Bensow, R.E. Hydrodynamic mechanisms controlling cavitation erosion. In Proceedings of the 29th Symposium on Naval Hydrodynamics, Gothenburg, Sweden, 26–31 August 2012. [Google Scholar]
















© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bosschers, J. A Semi-Empirical Prediction Method for Broadband Hull-Pressure Fluctuations and Underwater Radiated Noise by Propeller Tip Vortex Cavitation †. J. Mar. Sci. Eng. 2018, 6, 49. https://doi.org/10.3390/jmse6020049
Bosschers J. A Semi-Empirical Prediction Method for Broadband Hull-Pressure Fluctuations and Underwater Radiated Noise by Propeller Tip Vortex Cavitation †. Journal of Marine Science and Engineering. 2018; 6(2):49. https://doi.org/10.3390/jmse6020049
Chicago/Turabian StyleBosschers, Johan. 2018. "A Semi-Empirical Prediction Method for Broadband Hull-Pressure Fluctuations and Underwater Radiated Noise by Propeller Tip Vortex Cavitation †" Journal of Marine Science and Engineering 6, no. 2: 49. https://doi.org/10.3390/jmse6020049
APA StyleBosschers, J. (2018). A Semi-Empirical Prediction Method for Broadband Hull-Pressure Fluctuations and Underwater Radiated Noise by Propeller Tip Vortex Cavitation †. Journal of Marine Science and Engineering, 6(2), 49. https://doi.org/10.3390/jmse6020049