A Modeling Study on the Oil Spill of M/V Marathassa in Vancouver Harbour


Abstract
:1. Introduction
2. Materials and Methods
2.1. Hydrodynamic Forcing: FVCOM
2.1.1. FVCOM Description
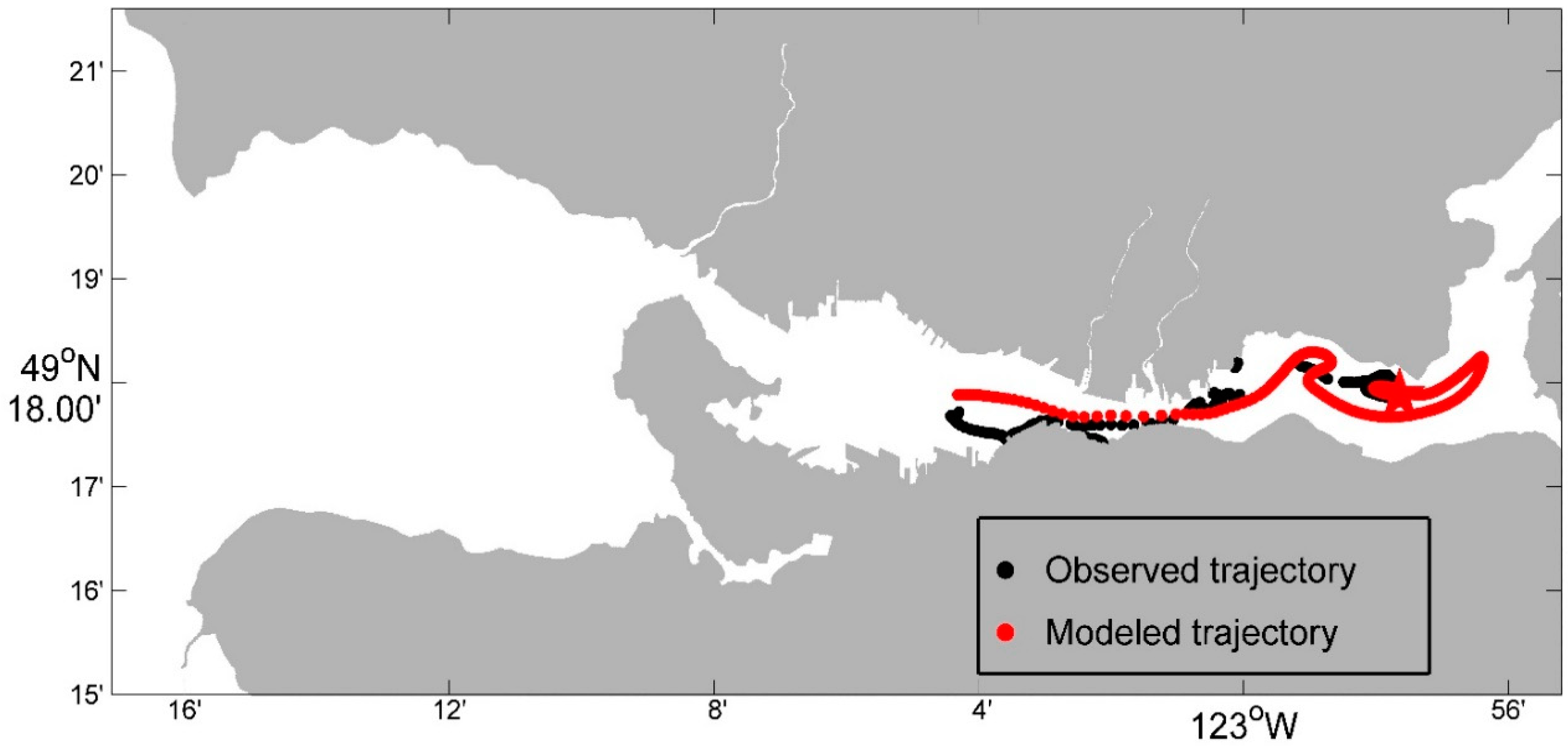
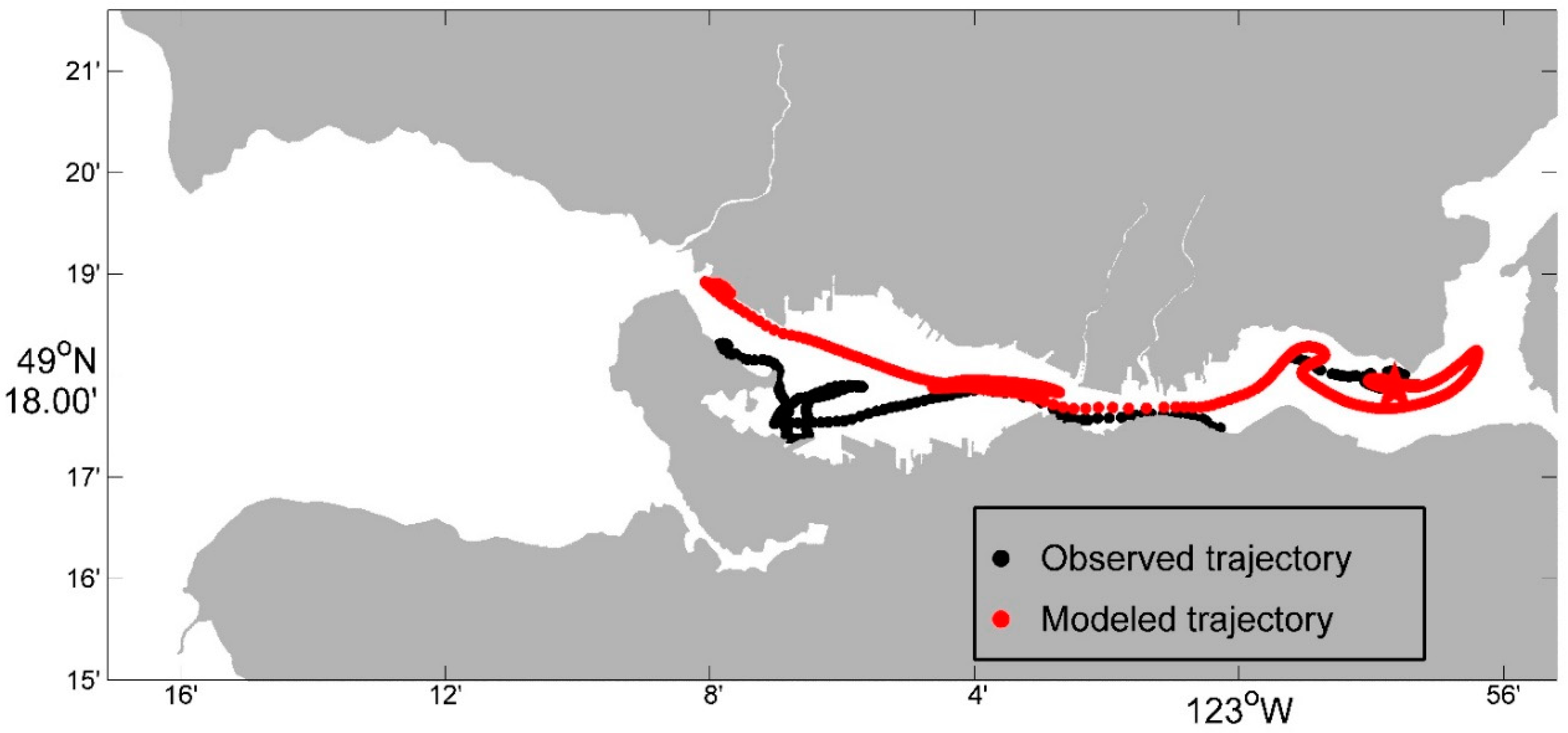
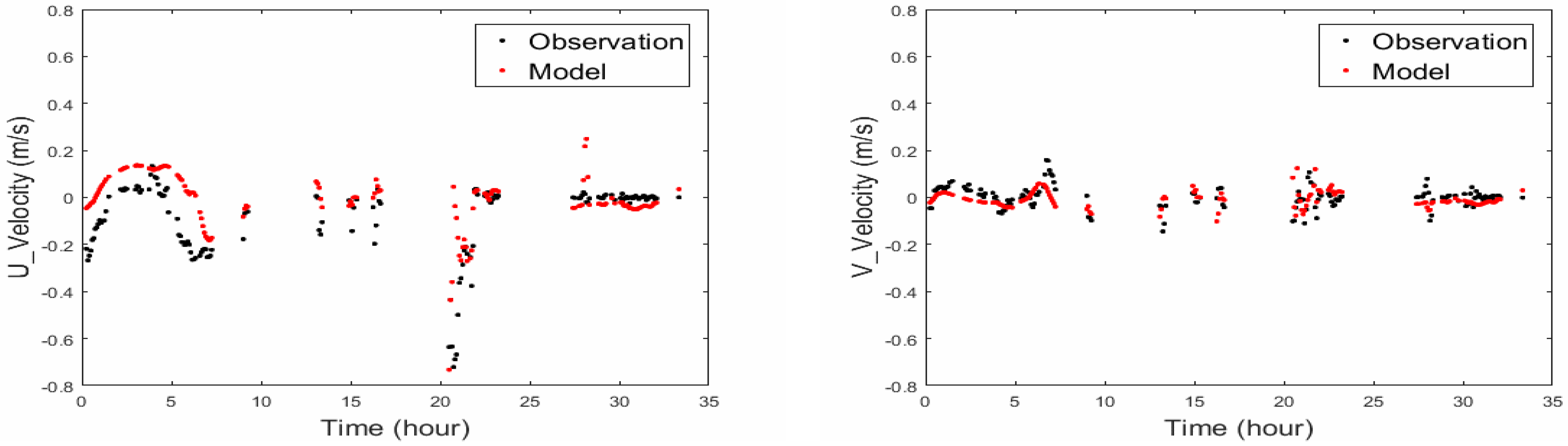
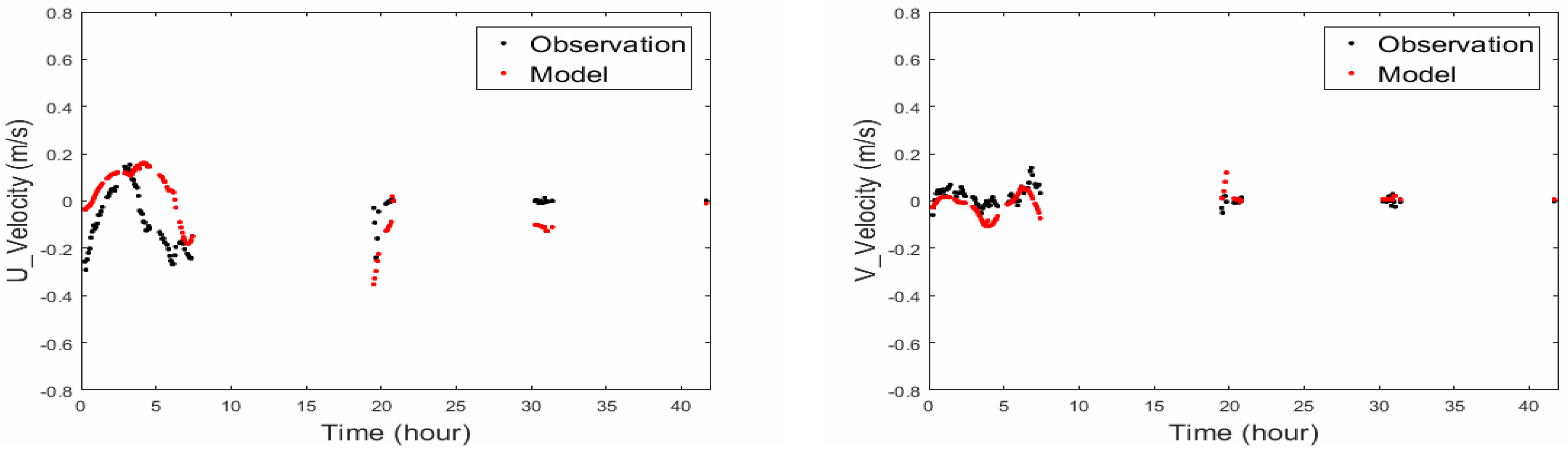
2.1.2. FVCOM Validation
2.2. Oil Spill Model: OSCAR
2.3. Wind Forcing: HRDPS Model
2.4. Hindcast Study of the M/V Marathassa Oil Spill
2.4.1. Identification of Spilled Oil
2.4.2. Potentially Influential Factors
2.4.3. Deterministic Approach
2.5. Statistical Analysis on Mass Balance
3. Results
3.1. FVCOM Validation
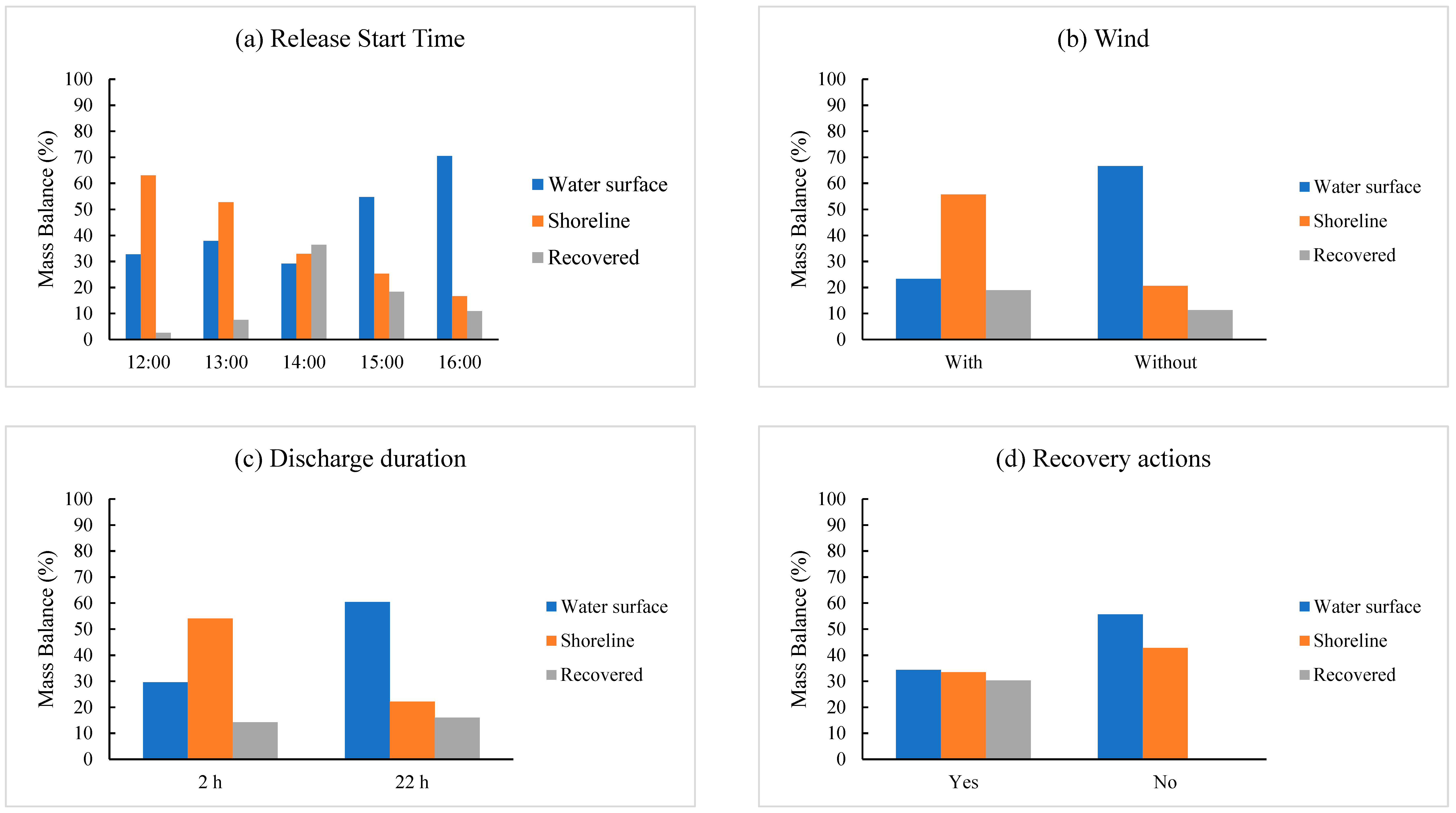
3.2. Impacts of Studied Factors on Oil Mass Balance and Trajectory
3.2.1. Influence of Release Start Time
3.2.2. Influence of Wind
3.2.3. Influence of Discharge Duration
3.2.4. Influence of Recovery Action
4. Discussion
4.1. FVCOM Validation
4.2. Hindcast of the MV Marathassa Oil Spill
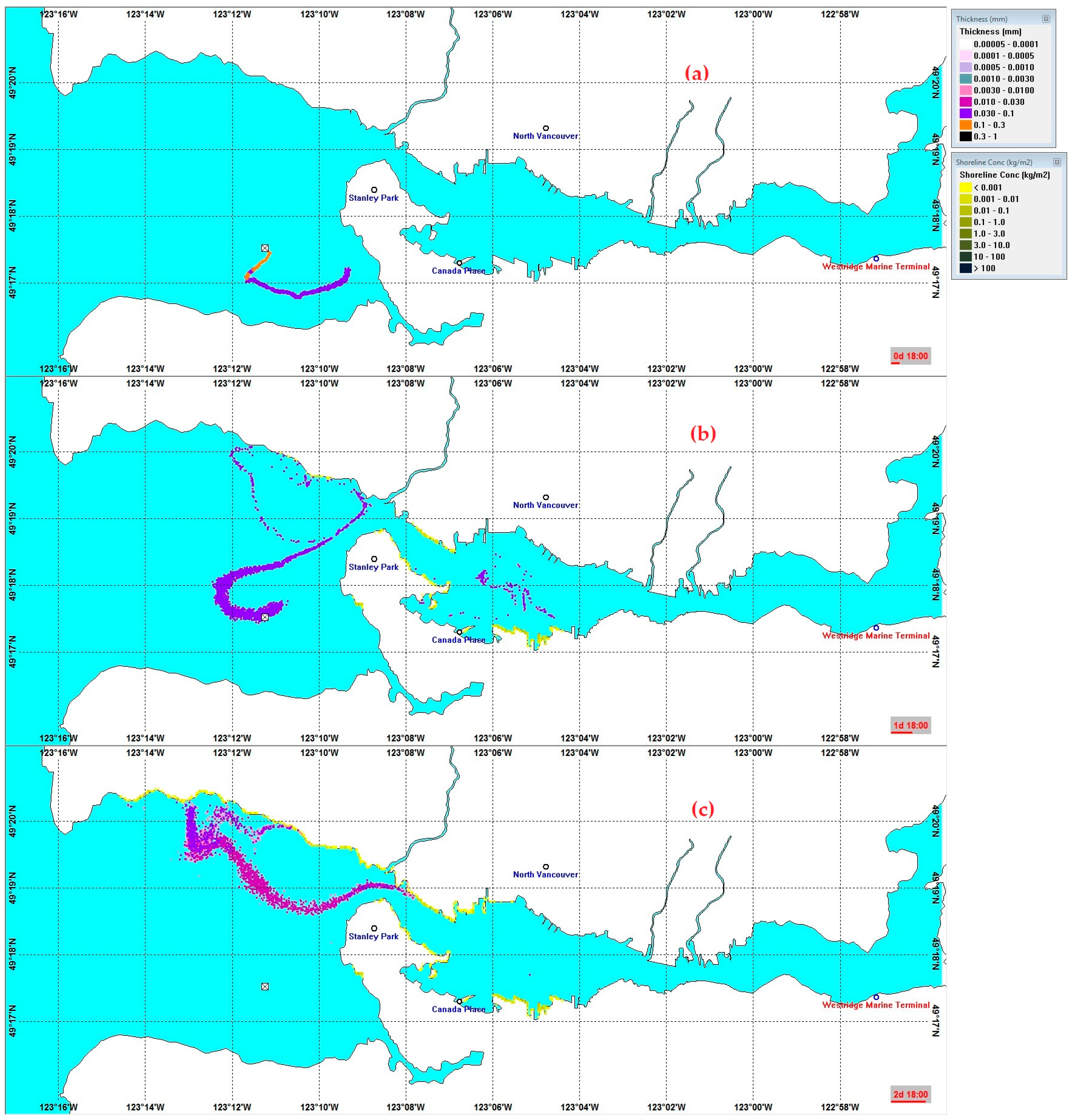
4.2.1. Comparison of Oil Trajectory
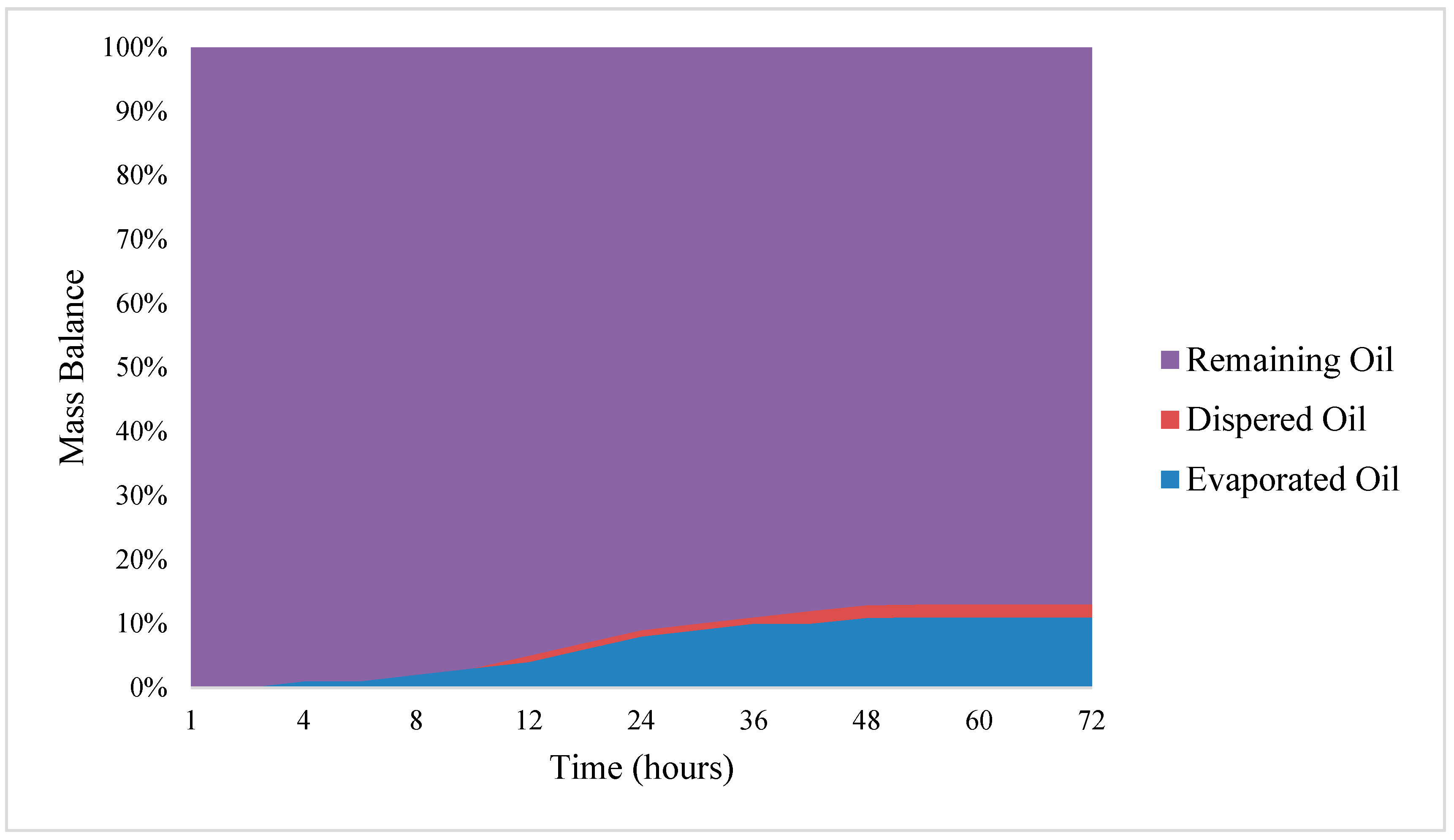
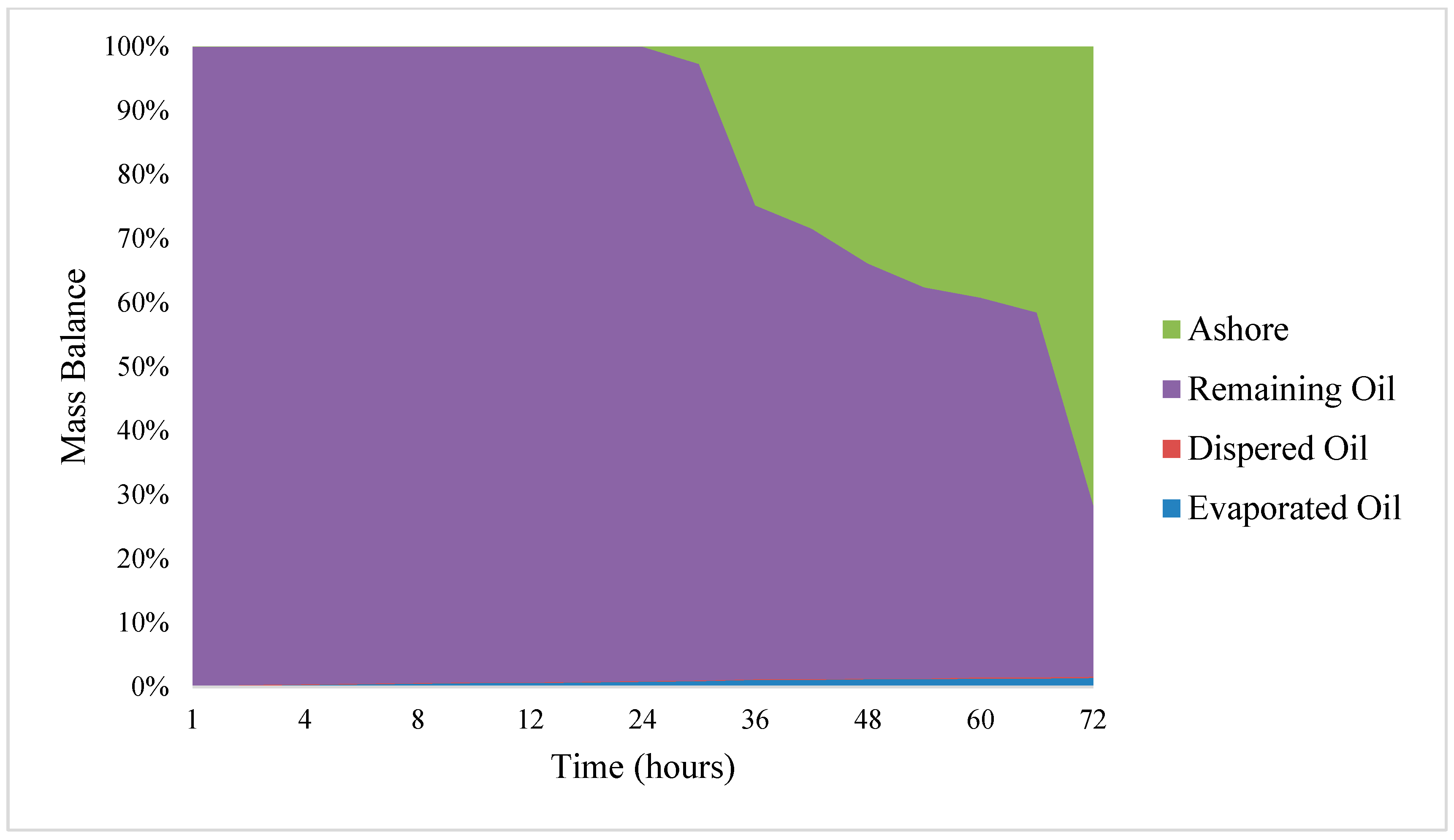
4.2.2. Comparison of Mass Balance
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hein, F.J.; Leckie, D.; Larter, S.; Suter, J.R. Heavy oil and bitumen petroleum systems in Alberta and beyond: The future is nonconventional and the future is now. In Heavy-Oil and Oil-Sand Petroleum Systems in Alberta and Beyond; American Association of Petroleum Geologists: Tulsa, OK, USA, 2013; pp. 1–21. [Google Scholar]
- Zmuda, K. Evaluation of the Regulatory Review Process for Pipeline Expansion in Canada: A Case Study of the Trans Mountain Expansion Project. Master’s Thesis, Simon Fraser University, Burnaby, BC, Canada, April 2017. [Google Scholar]
- Vancouver Fraser Port Authority Port of Vancouver Statistic Overview. Available online: https://www.portvancouver.com/wp-content/uploads/2018/03/2017-Stats-Overview-1.pdf (accessed on 17 July 2018).
- Butler, J. Independent Review of the M/V Marathassa Fuel Oil Spill Environmental Response Operation; Martin’s Marine Engineering Page: Nanaimo, BC, Canada, 2015. [Google Scholar]
- Port of Metro Vancouver (PMV). Anchorage Positions, Port of Metro Vancouver. Available online: https://www.google.com/maps/d/viewer?mid=1TyRAenKnwvN-TQ3ZCtNR0h98t1Q&hl=en_US (accessed on 17 July 2018).
- Gilbert, S.K. Concerns over Canadian Coast Guard Response to English Bay Oil Spill in Vancouver. Available online: http://www.oag-bvg.gc.ca/internet/English/pet_381_e_40802.html (accessed on 17 July 2018).
- Wootton, B. M/V Marathassa Fuel Spill Environmental Impact Assessment; Hemmera Envirochem Inc.: Burnaby, BC, Canada, 2015. [Google Scholar]
- Stormont, K. Stanley Park in the Wake of the English Bay Oil Spill. Available online: http://www.webcitation.org/70oOgbAj7 (accessed on 17 July 2018).
- Tetra Tech EBA Inc. SPILLCALC Oil and Contaminant Spill Model. Available online: http://www.tetratech.com/en/projects/spillcalc-oil-and-contaminant-spill-model (accessed on 10 September 2018).
- National Oceanic and Atmospheric Administration. GNOME User’s Manual. Available online: https://response.restoration.noaa.gov/sites/default/files/GNOME_Manual.pdf (accessed on 10 September 2018).
- SINTEF. OSCAR—Oil Spill Contingency and Response. Available online: http://www.sintef.no/en/software/oscar/ (accessed on 10 September 2018).
- RPS-ASA (Applied Science Associates, Inc.). OILMAP Oil Spill Model and Response System. Available online: http://www.asascience.com/software/oilmap/ (accessed on 10 September 2018).
- RPS-ASA (Applied Science Associates, Inc.). SIMAP Integrated Oil Spill Impact Model System. Available online: http://asascience.com/software/simap/ (accessed on 10 September 2018).
- Fernandes, R. Risk Management of Coastal Pollution from Oil Spills Supported by Operational Numerical Modelling. Ph.D. Thesis, Universidade de Lisboa, Lisbon, Portugal, February 2018. [Google Scholar]
- Danish Hydraulic Institute (DHI). DHI Oil Spill Model, Oil Spill Template, Scientific Description. Available online: http://manuals.mikepoweredbydhi.help/2017/General/DHI_OilSpill_Model.pdf (accessed on 9 September 2018).
- Tetra Tech EBA Inc. Modelling the Fate and Behaviour of Marine Oil Spills for the Trans Mountain Expansion Project Summary Report; Tetra Tech: Vancouver, BC, Canada, 2013. [Google Scholar]
- Genwest System Inc. Oil Spill Trajectory Modeling Report in Burrard Inlet for the Trans Mountain Expansion Project; Genwest System Inc.: Edmonds, WA, USA, 2015. [Google Scholar]
- Trans Mountain Pipeline ULC. Trans Mountain Pipeline ULC Trans Mountain Expansion Project Neb Heading Order Oh-001-2014 Reply Evidence; Tetra Tech EBA Inc.: Vancouver, BC, Canada, 2015. [Google Scholar]
- Stronach, J.A.; Hospital, A. The Implementation of Molecular Diffusion to Simulate the Fate and Behaviour of a Diluted Bitumen Oil Spill and its Application to Stochastic Modelling. In Proceedings of the 37th Arctic and Marine Oil Spill Program Technical Seminar on Environmental Contamination and Response, Canmore, AB, Canada, 3–5 June 2014; pp. 353–373. [Google Scholar]
- Niu, H.; Li, S.; King, T.; Lee, K. Stochastic Modeling of Oil Spill in the Salish Sea. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; pp. 353–373. [Google Scholar]
- Chen, C.; Liu, H.; Beardsley, R.C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: Application to coastal ocean and estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Chen, C.; Beardsley, R.C.; Cowles, G.; Qi, J.; Lai, Z.; Gao, G.; Stuebe, D.; Xu, Q.; Xue, P.; Ge, J.; et al. An Unstructured Grid, Finite-Volume Coastal Ocean Model: FVCOM User Manual, 3rd ed.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2011; pp. 303–315. [Google Scholar]
- Chen, C.; Beardsley, R.C.; Cowles, G. An unstructured grid, finite-volume coastal ocean model (FVCOM) system. Oceanography 2006, 19, 78–89. [Google Scholar] [CrossRef]
- Huang, H.; Chen, C.; Cowles, G.W.; Winant, C.D.; Beardsley, R.C.; Hedstrom, K.S.; Haidvogel, D.B. FVCOM validation experiments: Comparisons with ROMS for three idealized barotropic test problems. J. Geophys. Res. Oceans 2008, 113, C07042. [Google Scholar] [CrossRef]
- MEDML (Marine Ecosystem Dynamics Modeling Laboratory). The Unstructured Grid Finite Volume Community Ocean Model (FVCOM). Available online: http://fvcom.smast.umassd.edu/fvcom/ (accessed on 14 September 2018).
- Wu, Y.; Hannah, C.; O’Flaherty-Sproul, M.; MacAulay, P.; Shan, S. A modeling study on tides in the Port of Vancouver. Anthropocene Coasts. under review.
- Page, S.; Hannah, C.; Juhasz, T.; Spear, D.; Blanken, H. Surface Circulation Tracking drifter data for the Douglas Channel and the North Coast of British Columbia for April, 2014 to July, 2016. Can. Data Rep. Hydrogr. Ocean Sci. submitted for publication.
- Spitz, Y.H.; Klinck, J.M. Estimate of bottom and surface stress during a spring-neap tide cycle by dynamical assimilation of tide gauge observations in the Chesapeake Bay. J. Geophys. Res. Oceans 1998, 103, 12761–12782. [Google Scholar] [CrossRef] [Green Version]
- Warner, J.C.; Geyer, W.R.; Lerczak, J.A. Numerical modeling of an estuary: A comprehensive skill assessment. J. Geophys. Res. Oceans 2005, 110, C05001. [Google Scholar] [CrossRef]
- Aamo, O.M.; Reed, M.; Downing, K. Oil spill contingency and response (oscar) model system: Sensitivity studies. Int. Oil Spill Conf. Proc. 1997, 1997, 429–438. [Google Scholar] [CrossRef]
- Reed, M.; Aamo, O.M.; Downing, K. Calibration and testing of IKU’s oil spill contingency and response (OSCAR) model system. Int. Nucl. Inf. Syst. 1996, 28, 689–726. [Google Scholar]
- Reed, M.; Daling, P.S.; Brakstad, O.G.; Singsaas, I.; Faksness, L.-G.; Hetland, B.; Ekrol, N. OSCAR2000: A multi-component 3-dimensional oil spill contingency and response model. In Proceedings of the 23th Arctic and Marine Oil Spill Program (AMOP) Technical Seminar, Vancouver, BC, Canada, 14–16 January 2000; pp. 663–668. [Google Scholar]
- Abascal, A.J.; Castanedo, S.; Medina, R.; Liste, M. Analysis of the reliability of a statistical oil spill response model. Mar. Pollut. Bull. 2010, 60, 2099–2110. [Google Scholar] [CrossRef] [PubMed]
- HRDPS Data in GRIB2 Format. Available online: https://weather.gc.ca/grib/grib2_HRDPS_HR_e.html (accessed on 17 July 2018).
- Srinivasan, R.; Lu, Q.; Sorial, G.A.; Venosa, A.D.; Mullin, J. Dispersant Effectiveness of Heavy Fuel Oils Using Baffled Flask Test. Environ. Eng. Sci. 2007, 24, 1307–1320. [Google Scholar] [CrossRef]
- SL Ross Environmental Research Ltd. Spill Related Properties of IFO380 Fuel Oil. Available online: https://www.bsee.gov/sites/bsee.gov/files/osrr-oil-spill-response-research/506aa.pdf (accessed on 17 July 2018).
- SL Ross Environmental Research Ltd. Spill Related Properties of IFO180 Fuel Oil. Available online: https://www.bsee.gov/sites/bsee.gov/files/osrr-oil-spill-response-research/506ab.pdf (accessed on 17 July 2018).
- Meng, Q.; Wang, S.; Lee, C.-Y. A tailored branch-and-price approach for a joint tramp ship routing and bunkering problem. Transp. Res. Part B Methodol. 2015, 72, 1–19. [Google Scholar] [CrossRef]
- Reed, M.; Hetland, B. DREAM: A Dose-Related Exposure Assessment Model Technical Description of Physical-Chemical Fates Components. In Proceedings of the SPE International Conference on Health, Safety and Environment in Oil and Gas Exploration and Production, Kuala Lumpur, Malaysia, 20–22 March 2002. [Google Scholar]
- Halverson, M.; Gower, J.; Pawlowicz, R. Comparison of Drifting Buoy Velocities to HF Radar Radial Velocities from the Ocean Networks Canada Strait of Georgia 25 MHz CODAR Array; Institute of Ocean Sciences: Sydney, Australia, 2018.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Setting | |||||
|---|---|---|---|---|---|---|
| Starting-releasing time | 12:00 | 13:00 | 14:00 | 15:00 | 16:00 | |
| Wind forcing | With | Without | ||||
| Discharge duration | 2 h | 22 h | ||||
| Recovery action | Yes | No | ||||
| Statistical Measures | SCT1 | SCT2 | ||
|---|---|---|---|---|
| U-Velocity | V-Velocity | U-Velocity | V-Velocity | |
| Root-Mean-Squared-Error (RMSE) (m/s) | 0.149 | 0.056 | 0.158 | 0.052 |
| Relative average error (E) (%) | 48.65 | 76.38 | 73.42 | 68.44 |
| Correlation coefficient (R) | 0.618 | 0.256 | 0.310 | 0.383 |
| p-value for R | 0.000 | 0.001 | 0.003 | 0.000 |
| Skill | 0.719 | 0.514 | 0.577 | 0.551 |
| Source | Water Surface | Shoreline | Recovered |
|---|---|---|---|
| Start-releasing time | 0.000 | 0.001 | 0.008 |
| Wind | 0.000 | 0.000 | 0.196 |
| Discharge duration | 0.000 | 0.000 | 0.760 |
| Recovery action | 0.003 | 0.179 | 0.000 |
| Start-Releasing Time | Scenarios # | Labels of Surface Contaminant | Matches (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| 14:00 | 4 | √ | × | √ | √ | × | √ | √ | √ | √ | × | 70 |
| 8 | √ | × | √ | √ | × | √ | √ | √ | √ | × | 70 | |
| 15:00 | 4 | × | √ | √ | √ | √ | × | √ | √ | √ | × | 70 |
| 8 | × | √ | √ | √ | √ | × | √ | √ | √ | × | 70 | |
| Time to Start Spill | Scenarios # | Labels of Shoreline Contaminant | Matches (%) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | |||
| 14:00 | 4 | × | √ | √ | √ | √ | × | √ | √ | √ | √ | × | √ | × | √ | × | × | 62.5 |
| 8 | × | √ | √ | √ | √ | × | √ | √ | √ | √ | × | √ | × | √ | × | × | 62.5 | |
| 15:00 | 4 | × | √ | √ | √ | √ | × | √ | √ | √ | √ | × | √ | × | √ | × | × | 62.5 |
| 8 | × | √ | √ | √ | √ | × | √ | √ | √ | √ | × | √ | × | √ | × | × | 62.5 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, X.; Niu, H.; Wu, Y.; Hannah, C.; Li, S.; King, T. A Modeling Study on the Oil Spill of M/V Marathassa in Vancouver Harbour. J. Mar. Sci. Eng. 2018, 6, 106. https://doi.org/10.3390/jmse6030106
Zhong X, Niu H, Wu Y, Hannah C, Li S, King T. A Modeling Study on the Oil Spill of M/V Marathassa in Vancouver Harbour. Journal of Marine Science and Engineering. 2018; 6(3):106. https://doi.org/10.3390/jmse6030106
Chicago/Turabian StyleZhong, Xiaomei, Haibo Niu, Yongsheng Wu, Charles Hannah, Shihan Li, and Thomas King. 2018. "A Modeling Study on the Oil Spill of M/V Marathassa in Vancouver Harbour" Journal of Marine Science and Engineering 6, no. 3: 106. https://doi.org/10.3390/jmse6030106
APA StyleZhong, X., Niu, H., Wu, Y., Hannah, C., Li, S., & King, T. (2018). A Modeling Study on the Oil Spill of M/V Marathassa in Vancouver Harbour. Journal of Marine Science and Engineering, 6(3), 106. https://doi.org/10.3390/jmse6030106