1. Introduction
A trencher is a machine attached to a construction vehicle that digs trenches to lay pipes or electrical cables. Trenchers come in different sizes and types, depending on the required width and depth of the trench and the hardness of the surface to be cut. Wheel and chain trenchers are typical types, and these are typically used in onshore construction projects. Meanwhile, offshore industries such as offshore plants and offshore wind turbine farms have been growing steadily in recent decades, with many underwater trenchers developed and utilized for offshore construction as a result [
1].
For design of a chain trencher under specific conditions and to meet certain performance requirements, an effective approach that covers all required important features is mandatory. However, such an approach is lacking. Direct experiments are time-consuming and costly, whereas a strict scientific approach based on first-principles concepts such as theoretical rock mechanics is associated with numerous difficulties, including determining in detail the measured material properties and failure criteria, or selecting the proper fracture theory to use. Regarding these considerations, Mellor published in the 1970s a series of reports covering the mechanics of various cutting and boring machines, such as transverse rotation machines, axial rotation machines, and continuous belt machines, by analytically described the kinematics, dynamics, and energetics of each machine [
2,
3,
4,
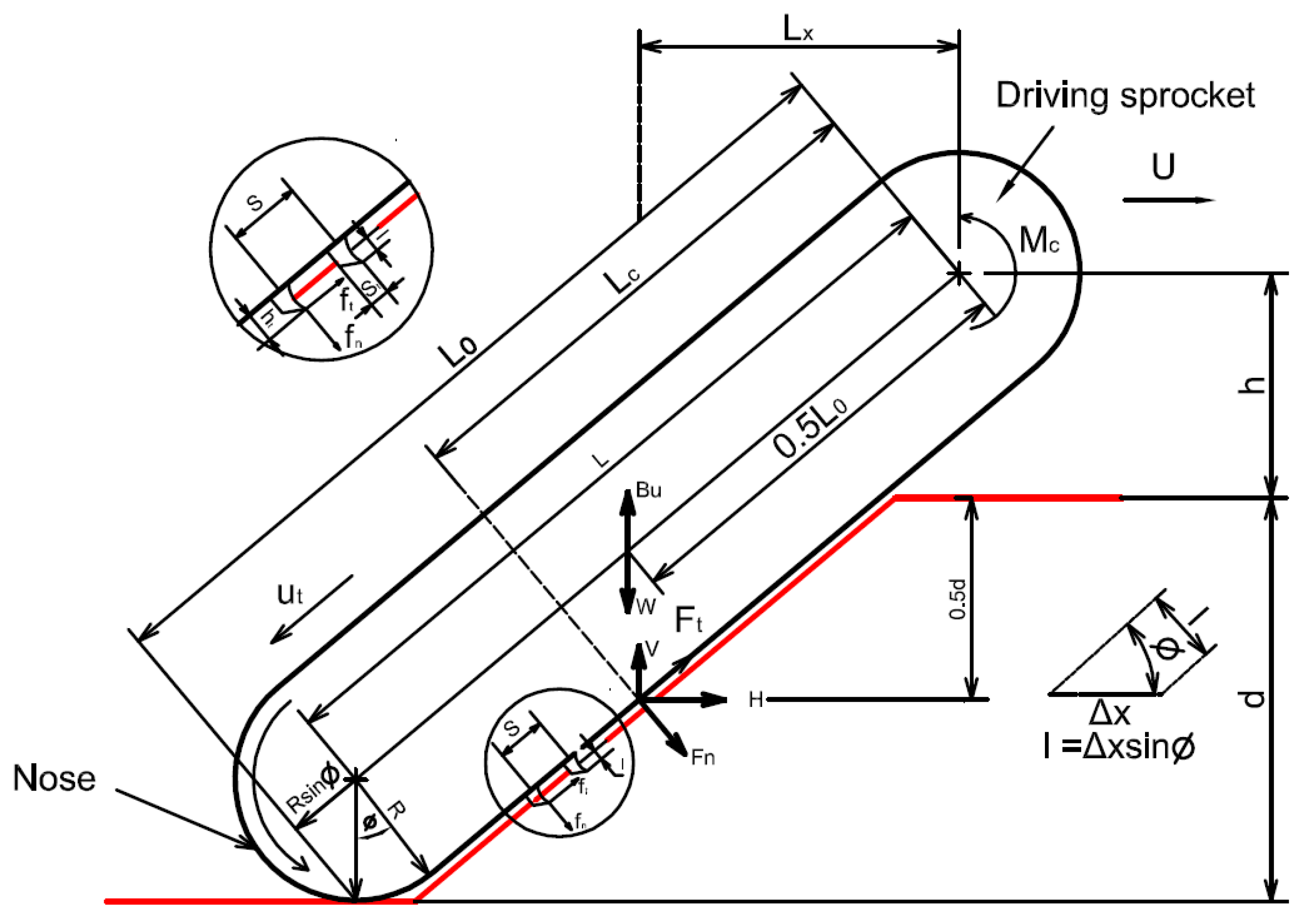
5]. Mellor’s analytical model of a continuous belt machine is adopted in this study to design a chain trencher.
It is indispensable to adopt an analytical model when designing an underwater chain trencher and considering the kinematics, dynamics, and energetics of the machine. The analytical model in this case contains theoretical equations for the geometry and motion of a continuous chain trencher used in cutting and excavating tasks. The model takes into account the kinematics, dynamics, and energetics of the machine. In previous studies involving a kinematic analysis [
1,
6,
7,
8], the relationships between the tool speed, traverse speed, chipping depth, cutting tool spacing, and bar angle were introduced. A dynamic analysis deals with the forces acting on the machine and its cutting tools, whereas an energetic analysis deals with the specific energy, all related types of power required for the cutting task, and the mechanical losses due to drag and friction. It also considers the properties of the material being cut and the performance index of the machine. In several studies [
1,
7,
8], parametric and sensitivity analyses were conducted based on analytic models for the design of the machine. However, in order to determine the best combination of parameters to thus provide the best performance, techniques by which to optimize the design parameters are required. Existing methods such as the trial-and-error approach are time and costly, and they may or may not provide such optimized values.
For this reason, this study focuses on a formulation of design optimization of a trenching machine operated under the sea of which machines require designs with weight and power minimized. Although there are many trenchers manufactured by different companies around the world, information about a design process which can be used to develop such machines is very limited owing to the proprietary rights held by the companies who make them. In this industrial sector, companies have gained a wealth of experience by designing and producing such machines during the gradual development and evolution of their successive generations.
Multi-objective optimization has been applied in engineering fields where optimal decisions must be made in the presence of two or more objectives, such as the power, which is the product of torque and velocity, and weight of a rotary machine. Multi-objective design optimization has been implemented in many engineering applications, such as airfoil shape optimization [
9], engine design [
10] and optimal controller design [
11].
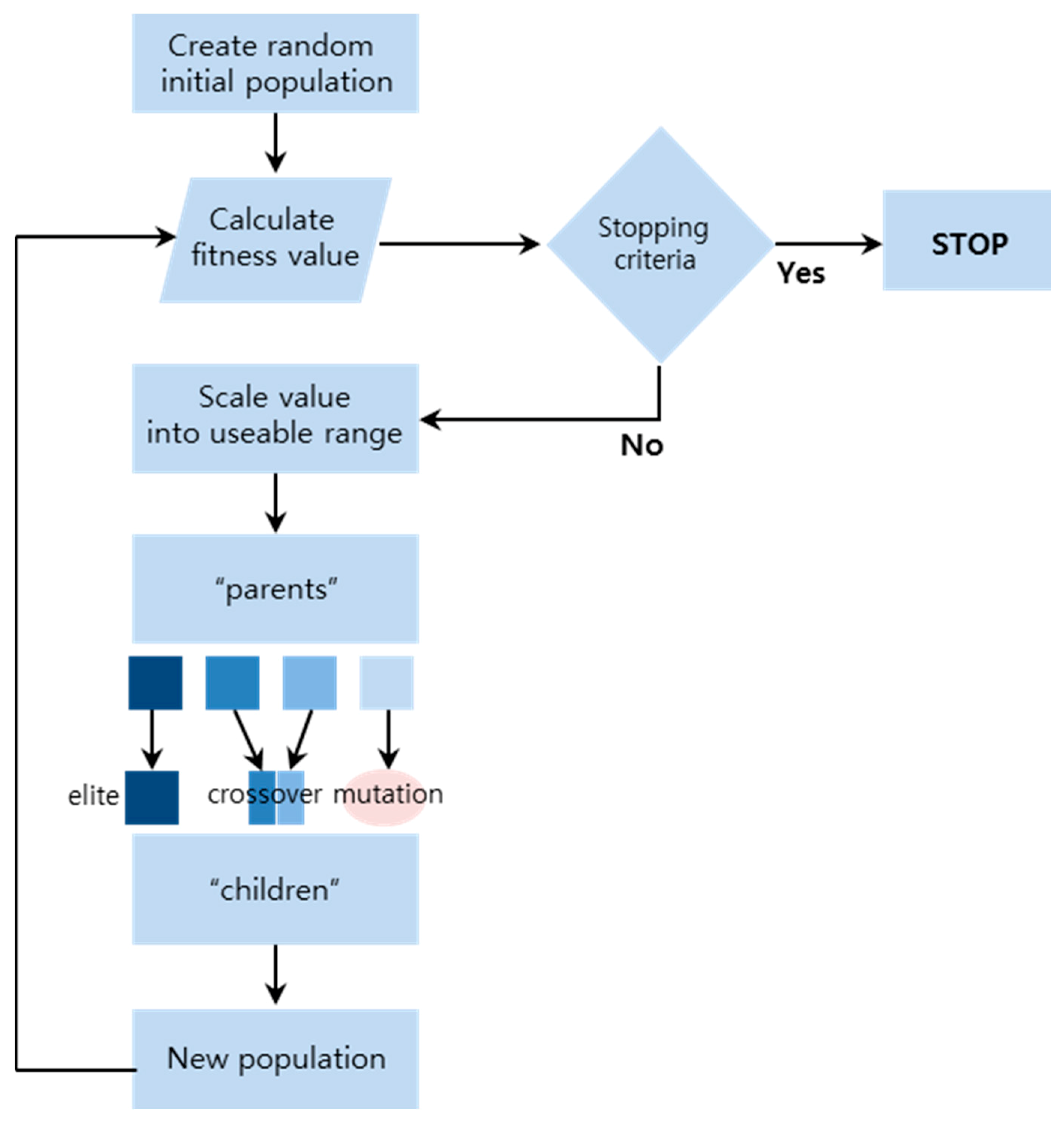
Genetic algorithms (GA) have been widely used over the last two decades to address this type of multi-criteria decision problem. The GA is non-deterministic stochastic search method that utilizes the theories of evolution and natural selection to solve a problem within a complex solution space [
12]. A GA can be used to solve multi-objective optimization problems in which the objective functions and constraints are defined in terms of the decision variables. A GA has been utilized for the optimization of certain defined problems to obtain the values of design parameters from the output. A multi-objective genetic algorithm implements the condition of weak dominance, and this type has been used for constrained minimization problems. A GA when used during the design process of a structure is a simple and very effective means of quickly finding a reasonable solution to the given problem.
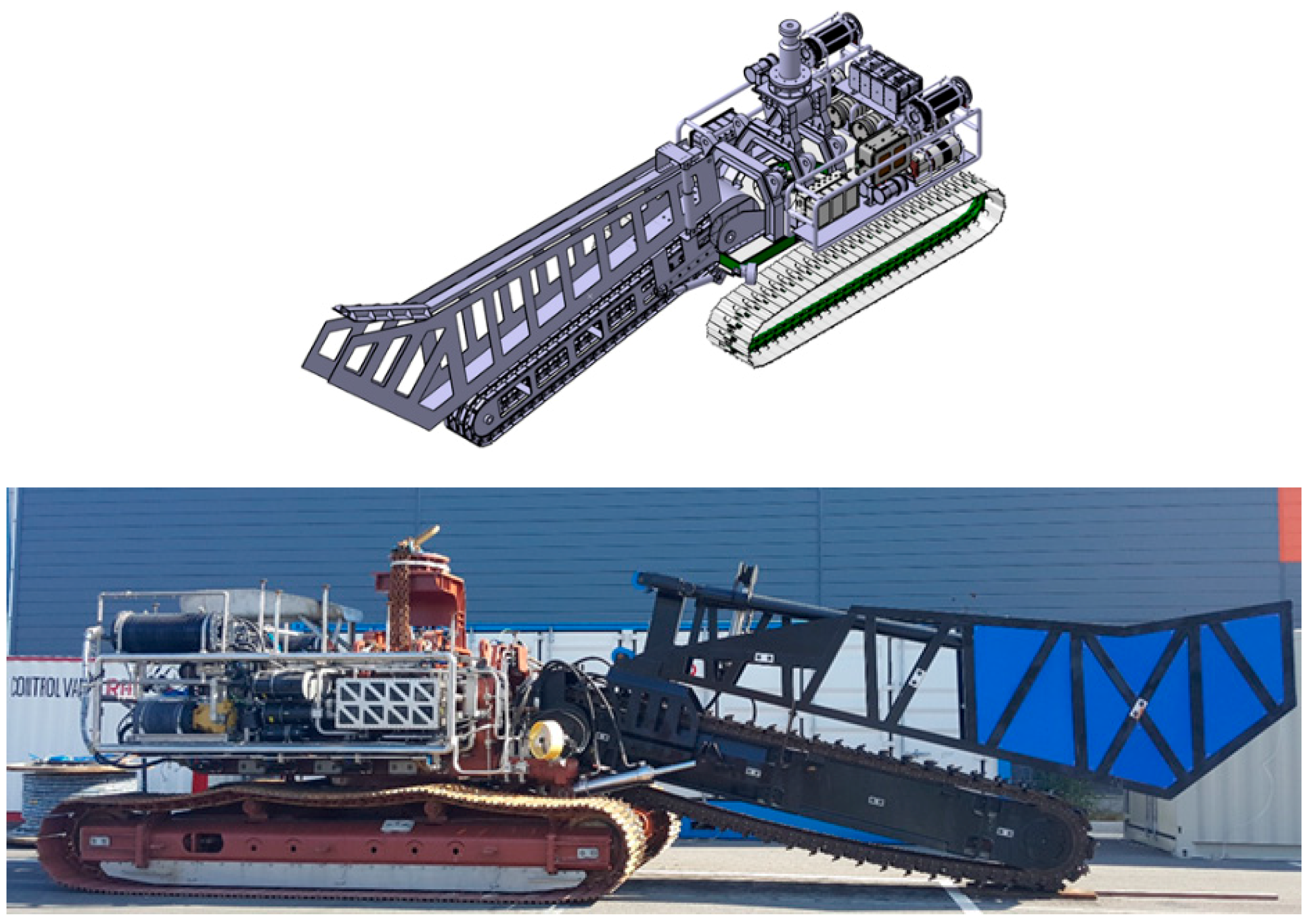
Thus, in this paper, a genetic algorithm was adopted from among these multi-objective optimization methods in order to realize an optimal design that minimizes the chain-running power as well as the weight of the trencher. A track-based heavy-duty underwater construction robot with the trencher is targeted to cut a trench with a length of 300 m, a width of 0.6 m and a depth of 2.5m within one hour on the seabed with a uniaxial compressive strength of around 20 MPa, which is the maximum value for a soft rock condition. The target specifications of the construction vehicle are listed in
Table 1.
4. Conclusions
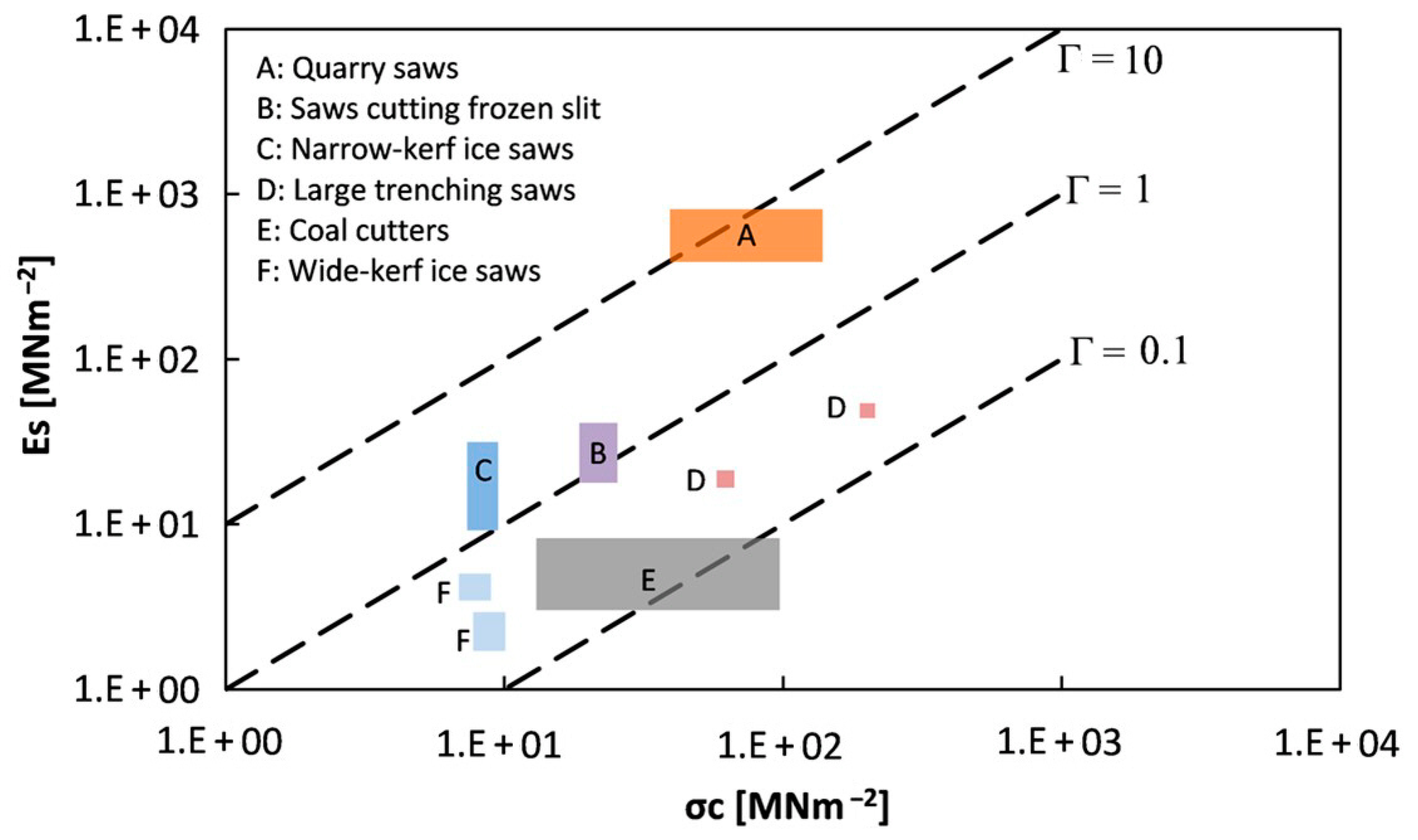
This paper presents how multi-objective optimization by a genetic algorithm with an analytical model can be used to establish the optimal design of an underwater chain trenching machine. Given that launch and recovery procedures are mandatory for underwater operations, minimizing the chain-running power and the weight of the tracked vehicle with the trencher must be done for the proper design of the machine. For this reason, we chose the power, a product of the chain speed and tool force, and the weight as multiple objectives during the optimization process. Operating conditions such as the uniaxial compressive strength, and coefficient of traction as well as design parameters such as bar length (L), nose radius (R) and ratio of the chipping depth over the spacing (l/S) are selected and their ranges are determined based on specifications of commercial trenchers that meet certain performance requirements as well as previous results from a parametric analysis with an analytical model. A genetic algorithm (GA), a type of multi-objective optimization method, is chosen due to the complex solution space associated with these parameters. The definition of the optimization problem is then suggested by changing the combination of the chain speed, tool force, and weight when composing the two objectives.
In the first case, considering the ranges of the rock and traction conditions, the uniaxial compressive strength and coefficient of traction move to the corresponding lower and upper bounds, which can be considered as the most favorable conditions in the provided ranges, to minimize the power and the weight, respectively. It was also found that an optimal design from GA can be obtained with L and l/S close to their low bounds and R far from its low bound, with the power and weight then showing much smaller values as compared to those of commercial machines. In the next case considering the most severe rock and traction conditions, it was noted that an optimal solution arises similarly to the first case and that the two objectives are in the ranges of commercial machines. As compared with a parametric analysis, the GA suggests larger nose radius, which is accounted as considerable difference between the two methods. Therefore, the suggested optimization process using the GA algorithm with an analytic model can provide feasible design specifications close to those of commercial trenchers in soft rock and typical traction conditions.
The optimal design by the GA was used to determine the specifications of the final design of a prototype, which was successfully demonstrated at onshore and offshore sites. Future work will focus on an enhancement of the design process by tuning the experimental data after the demonstration of the prototype.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}