Experimental and Numerical Investigation of Self-Burial Mechanism of Pipeline with Spoiler under Steady Flow Conditions

 ,
,  and
and
Abstract
:1. Introduction
2. Laboratory Experiment
2.1. Description of the Hydraulic Model
2.2. Experimental Conditions and Measurements
2.3. Experimental Results
2.3.1. Scour Characteristics
2.3.2. Self-Burial Function
3. Numerical Simulation
3.1. Governing Equations
3.2. Validation of Numerical Model
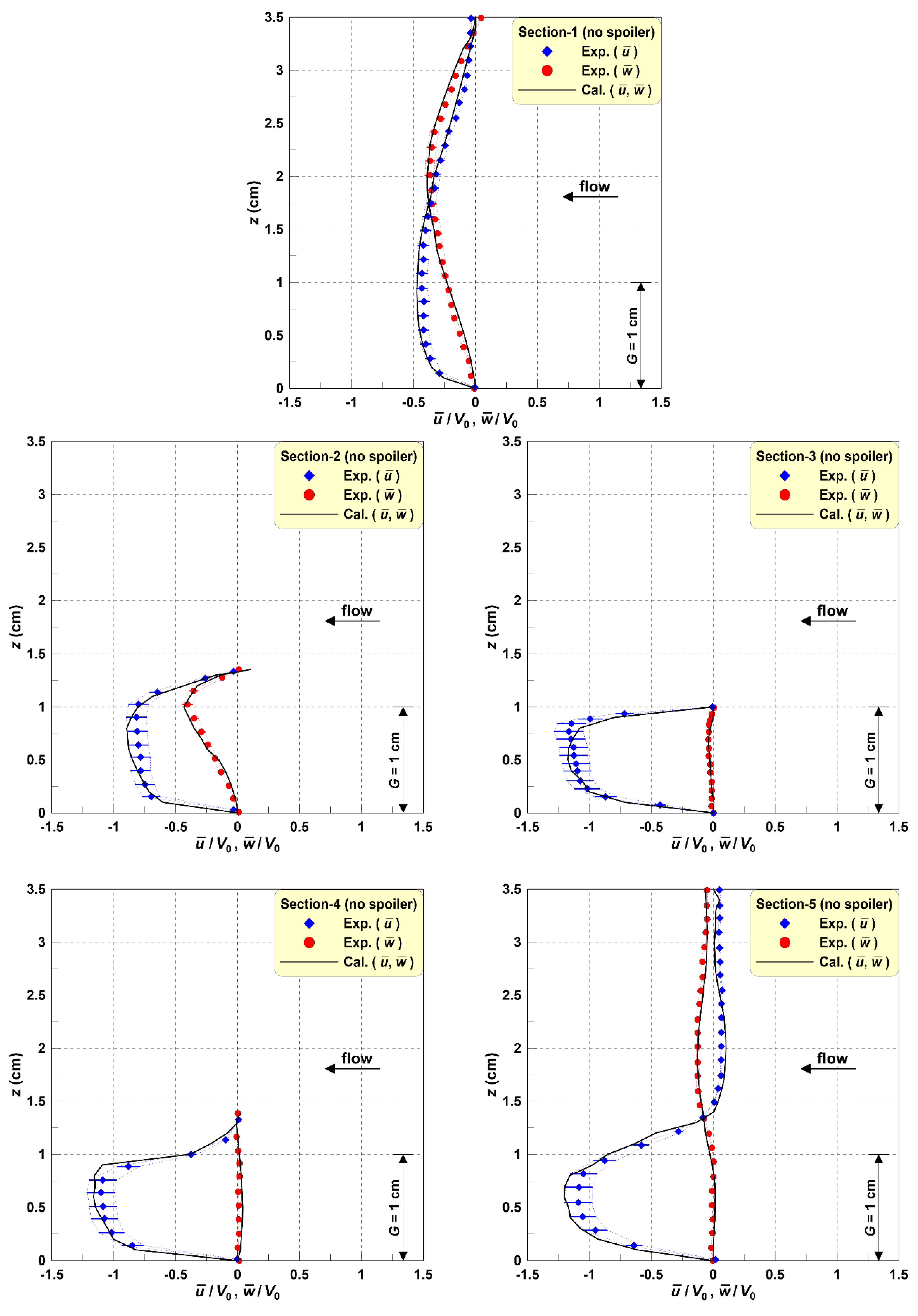
3.2.1. Velocity under Pipe with Spoiler
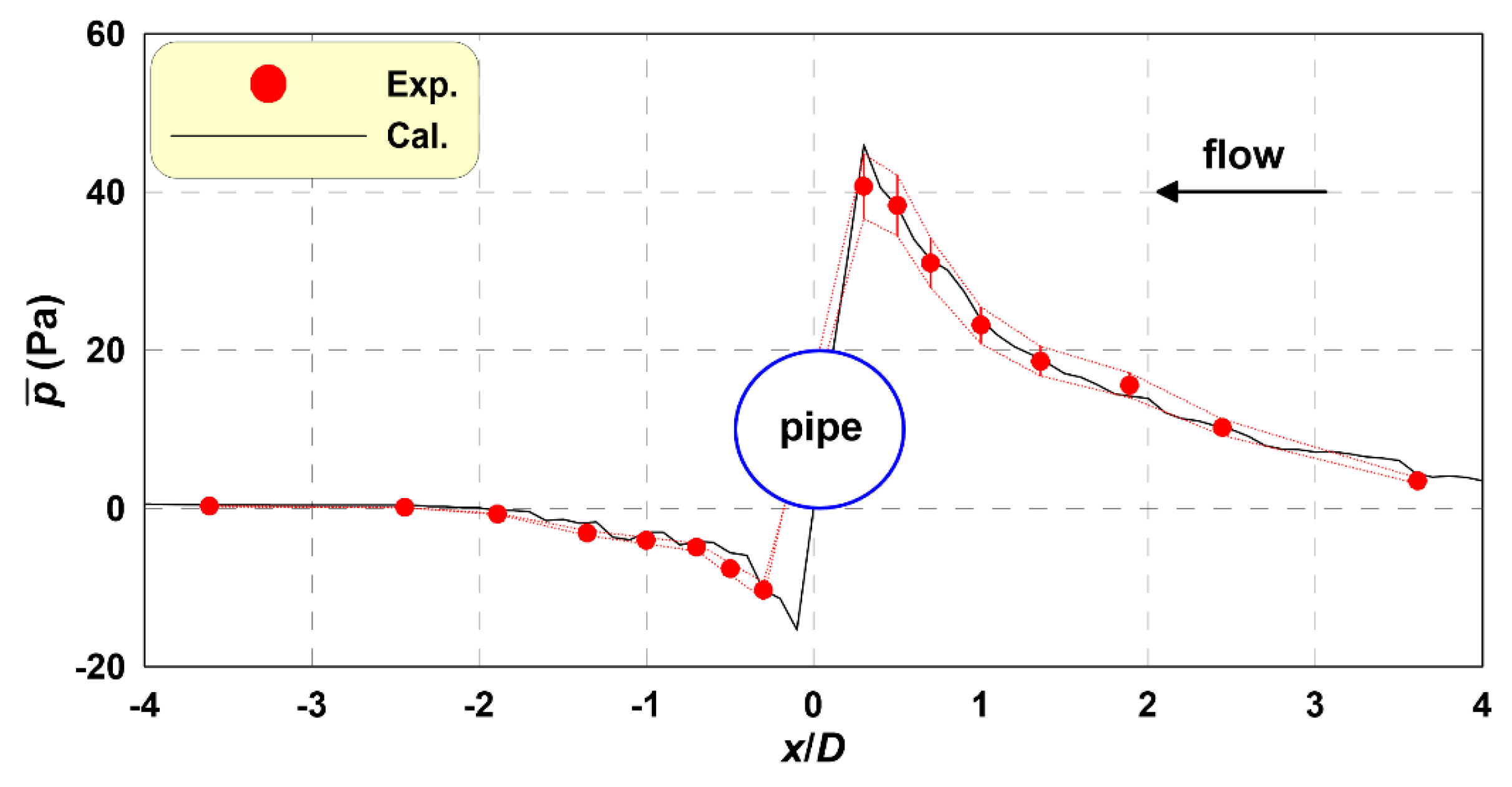
3.2.2. Bottom Pressure around Pipeline
3.2.3. Accuracy of Numerical Model
3.3. Numerical Conditions
3.4. Numerical Results
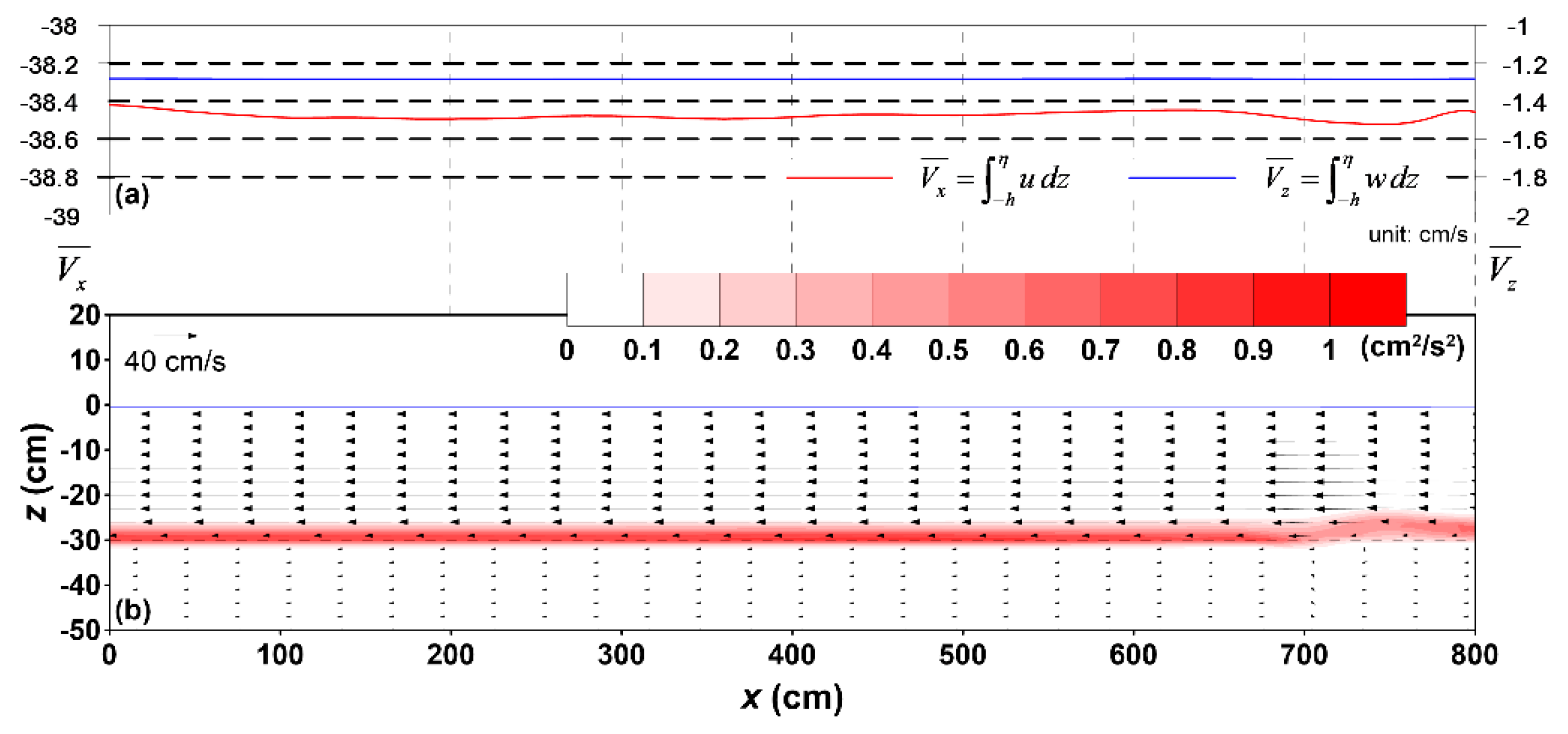
3.4.1. Flow and Vortex Fields
3.4.2. Pressure Field and Force Acting on Pipe
4. Conclusions
- (1)
- Hydraulic model tests with each side of a pipeline fixed showed that the equilibrium scour depth and scour range increased with the increase in the spoiler length to pipe diameter ratio (S/D).
- (2)
- Hydraulic model tests with non-fixed pipelines with spoilers, which could move freely, showed that the pipelines self-buried safely when exposed to steady flow. However, when the spoiler length was the longest (0.5D), unstable self-burial happened, where the pipeline was completely buried, but the spoiler was visible above the sand foundation.
- (3)
- In order to evaluate the suitability of the two-dimensional N–S solver, the numerical model, LES-WASS-2D used for numerical analyses; the velocity at the bottom of subsea pipelines with spoilers measured by Oner [21] and the pressure on the sand foundation surface right below the pipeline measured by Yang et al. [41] were compared and studied. The calculated results from the numerical model successfully reproduced the experimental results.
- (4)
- When a pipeline is built on a seabed, slipstream forms owing to the flow leaving from the top and bottom of the pipe. Further, a vortex forms near the pipe owing to flow resistance. Such a hydraulic phenomenon is exacerbated with a spoiler attachment.
- (5)
- Velocity and vorticity near the pipeline and the vorticity magnitude at the bottom of the pipe were numerically analyzed. Scouring due to the vorticity at the bottom of a pipeline accelerated even more with a spoiler, benefitting the self-burial process. Further, the pressure differences at the front and rear end of the pipeline near the seabed surface, which has a close relationship with scouring, increased greatly when a spoiler was attached.
- (6)
- Top and bottom asymmetry of the pressure structure that formed from spoiler attachments increased the downward fluid force acting on the pipe. This was also one of the major causes of self-burial of subsea pipelines.
- (7)
- The two major causes indicated in (5) and (6) above, working concurrently for the self-burial of pipelines with spoiler attachments, were numerically analyzed.
Author Contributions
Funding
Conflicts of Interest
References
- Jensen, B.L.; Sumer, B.M.; Jensen, H.R.; Fredsøe, J. Flow around and forces on a pipeline near a scoured bed in steady stream. J. Offshore Mech. Arct. Eng. 1990, 112, 206–312. [Google Scholar] [CrossRef]
- Sumer, B.M.; Mao, Y.; Fredsøe, J. Interaction between vibrating pipe and erodible bed. J. Waterw. Port Coast. Ocean Eng. 1988, 114, 81–92. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. Scour below pipelines in waves. J. Waterw. Port Coast. Ocean Eng. 1990, 116, 307–323. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. Onset of scour below a pipeline exposed to waves. Int. J. Offshore Polar Eng. 1991, 1, 189–194. [Google Scholar]
- Sumer, B.M.; Fredsøe, J. Scour around pile in combined waves and currents. J. Hydraul. Eng. 2001, 127, 403–411. [Google Scholar] [CrossRef]
- Yang, G.; Ye, J. Wave & current-induced progressive liquefaction in loosely deposited seabed. Ocean Eng. 2017, 142, 303–314. [Google Scholar]
- Tong, D.; Liao, C.; Chen, J.; Zhang, Q. Numerical simulation of a sandy seabed response to water surface waves propagating on current. J. Mar. Sci. Eng. 2018, 6, 88. [Google Scholar] [CrossRef] [Green Version]
- Sumer, B.M.; Fredsøe, J. Advanced Series on Ocean Engineering 17. In The Mechanics of Scour in the Marine Environment; World Scientific: Singapore, 2002; p. 536. [Google Scholar]
- Sumer, B.M. Advanced Series on Ocean Engineering 39. In Liquefaction around Marine Structures; World Scientific: Singapore, 2014; p. 472. [Google Scholar]
- Hulsbergen, C.H. Stimulated self-burial of submarine pipelines. In Proceedings of the 16th Offshore Technology Conference, Houston, TX, USA, 7–9 May 1984; OTC 4667. pp. 171–177. [Google Scholar]
- Hulsbergen, C.H.; Bijker, H. Effect of spoilers submarine pipeline stability. In Proceedings of the 21st Offshore Technology Conference, Houston, TX, USA, 1–4 May 1989; OTC 6154. pp. 337–350. [Google Scholar]
- Chiew, Y. Effect of spoilers on scour at submarine pipelines. J. Hydraul. Eng. 1990, 118, 1311–1317. [Google Scholar] [CrossRef]
- Chiew, Y. Effect of spoilers on wave-induced scour at submarine pipelines. J. Waterw. Port Coast. Ocean Eng. 1993, 417, 417–428. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X. CFD numerical simulation of the submarine pipeline with a spoiler. J. Offshore Mech. Arct. Eng. 2009, 131, 031601. [Google Scholar] [CrossRef]
- Sumer, B.M.; Truelsen, C.; Shchmann, T.; Fredsøe, J. Onset of scour below pipelines and self-burial. Coast. Eng. 2001, 42, 313–335. [Google Scholar] [CrossRef]
- Alam, M.S.; Cheng, L. A 2-D model to predict time development of scour below pipelines with spoiler. In 2nd International Symposium on Computational Mechanics and 12th International Conference on the Enhancement and Promotion of Computational Methods in Engineering and Science; American Institution of Physics: New York, NY, USA, 2010; pp. 993–998. [Google Scholar]
- Yang, L.; Shi, B.; Guo, Y.; Wen, X. Calculation and experiment on scour depth for submarine pipeline with a spoiler. Ocean Eng. 2012, 55, 191–198. [Google Scholar] [CrossRef]
- Yang, L.; Guo, Y.; Shi, B.; Kuang, C.; Xu, W.; Cao, S. Study of scour around submarine pipeline with a rubber plate or rigid spoiler in wave conditions. J. Waterw. Port Coast. Ocean Eng. 2012, 138, 484–490. [Google Scholar] [CrossRef]
- Abbasi, S.; Masoomi, M.; Arjmandi, S.A. Impact of a Single Spoiler on Scouring Depth Status Beneath a River Crossing Inclined Pipeline. Eng. Technol. Appl. Sci. Res. 2018, 8, 3316–3320. [Google Scholar]
- Cheng, L.; Chew, L. Modelling of flow around a near-bed pipeline with a spoiler. Ocean Eng. 2003, 30, 1595–1611. [Google Scholar] [CrossRef]
- Oner, A.A. The flow around a pipeline with a spoiler. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. 2010, 224, 109–121. [Google Scholar] [CrossRef]
- Han, Y. Study on the submarine pipeline with flexible spoilers. Key Eng. Mater. 2012, 501, 431–435. [Google Scholar] [CrossRef]
- Zhu, H.; Qi, X.; Lin, P.; Yang, Y. Numerical simulation of flow around a submarine pipe with a spoiler and current-induced scour beneath the pipe. Appl. Ocean Res. 2013, 41, 87–100. [Google Scholar] [CrossRef]
- Oner, A.A. Numerical investigation of flow around a pipeline with a spoiler near a rigid bed. Adv. Mech. Eng. 2016, 8, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Barendse, C.A.M. Hydrodynamic Forces on a Near-Bed Offshore Pipeline with Spoiler, during the Selfburying Process. Master’s Thesis, TU Delft, Delft, The Netherlands, 1988; p. 193. [Google Scholar]
- Bakhtiary, A.D.; Zeinali, M. Numerical simulation of hydrodynamic forces on submarine pipeline with a spoiler. In Proceedings of the 8th International Conference on Coasts, Ports and Marine Structures (ICOPMAS), Ports and Marine Organization, Tehran, Iran, 24–26 November 2008; Volume 8, pp. 1–12. [Google Scholar]
- Nortek, The Comprehensive Manual—Velocimeters. Nortek Underwater Instruments, 2018. Available online: http://nortekgroup.com (accessed on 25 November 2019).
- Hur, D.S.; Lee, K.H.; Choi, D.S. Effect of the slope gradient of submerged breakwaters on wave energy dissipation. Eng. Appl. Comput. Fluid Mech. 2011, 5, 83–98. [Google Scholar] [CrossRef] [Green Version]
- Smagorinsky, J. General circulation experiments with the primitive equation. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Sakakiyama, T.; Kajima, R. Numerical simulation of nonlinear wave interacting with permeable breakwater. In Proceedings of the 23rd International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992; pp. 1517–1530. [Google Scholar]
- Ergun, S. Fluid flow through packed columns. Chem. Eng. Prog. 1952, 48, 89–94. [Google Scholar]
- Liu, S.; Masliyah, J.H. Non-linear flows in porous media. J. Non-Newton. Fluid Mech. 1999, 86, 229–252. [Google Scholar] [CrossRef]
- Hinatsu, M. Numerical simulation of unsteady viscous nonlinear waves using moving grid system fitted on a free surface. J. Kansai Soc. Nav. Archit. 1992, 217, 1–11. [Google Scholar]
- Brorsen, M.; Larsen, J. Source generation of nonlinear gravity wave with boundary integral equation method. Coast. Eng. 1987, 11, 93–113. [Google Scholar] [CrossRef]
- Lee, W.D.; Yoo, Y.J.; Jeong, Y.M.; Hur, D.S. Experimental and numerical analysis on hydraulic characteristics of coastal aquifers with seawall. Water 2019, 11, 2343. [Google Scholar] [CrossRef] [Green Version]
- Ohyama, T.; Nadaoka, K. Modeling the transformation of nonlinear waves passing over a submerged dike. In Proceedings of the 23rd International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992; pp. 526–539. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Hur, D.S.; Lee, W.D.; Cho, W.C.; Jeong, Y.H.; Jeong, Y.M. Rip current reduction at the open inlet between double submerged breakwaters by installing a drainage channel. Ocean Eng. 2019, 193, 106580. [Google Scholar] [CrossRef]
- Lee, W.D.; Jeong, Y.H.; Jeon, H.S. Groundwater flow analysis in a coastal aquifer with the coexistence of seawater and freshwater by using a non-hydrostatic pressure model. J. Coast. Res. 2019, 91, 121–125. [Google Scholar] [CrossRef]
- Petit, H.A.H.; Tonjes, P.; ven Gent, M.R.A.; van den Bosch, P. Numerical simulation and validation of plunging breakers using a 2D Navier–Stokes model. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994; pp. 511–524. [Google Scholar]
- Yang, L.; Shi, B.; Guo, Y.; Zhang, L.; Zhang, J.; Han, Y. Scour protection of submarine pipelines using rubber plates underneath the pipes. Ocean Eng. 2014, 84, 176–182. [Google Scholar] [CrossRef] [Green Version]
- Christensen, E.D. Large eddy simulation of spilling and plunging breakers. Coast. Eng. 2006, 53, 463–485. [Google Scholar] [CrossRef]
- Raffel, M.; Willert, C.E.; Wereley, S.T.; Kompenhans, J. Particle Image Velocimetry; Springer Verlag: Berlin, Germany, 2007; p. 448. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Run | Velocity | Pipe | Spoiler | |
|---|---|---|---|---|
| Diameter | Length | Ratio | ||
| V0 (cm/s) | D (cm) | S (cm) | S/D | |
| 1 | 40 | 5 | - | |
| 2 | 1.5 | 0.3 | ||
| 3 | 2.5 | 0.5 | ||
| Sort | Pipe Model |
|---|---|
| Density (g/cm3) | 1.45 |
| Mass per length (g/cm) | 8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, W.-D.; Jo, H.-J.; Kim, H.-S.; Kang, M.-J.; Jung, K.-H.; Hur, D.-S. Experimental and Numerical Investigation of Self-Burial Mechanism of Pipeline with Spoiler under Steady Flow Conditions. J. Mar. Sci. Eng. 2019, 7, 456. https://doi.org/10.3390/jmse7120456
Lee W-D, Jo H-J, Kim H-S, Kang M-J, Jung K-H, Hur D-S. Experimental and Numerical Investigation of Self-Burial Mechanism of Pipeline with Spoiler under Steady Flow Conditions. Journal of Marine Science and Engineering. 2019; 7(12):456. https://doi.org/10.3390/jmse7120456
Chicago/Turabian StyleLee, Woo-Dong, Hyo-Jae Jo, Han-Sol Kim, Min-Jun Kang, Kwang-Hyo Jung, and Dong-Soo Hur. 2019. "Experimental and Numerical Investigation of Self-Burial Mechanism of Pipeline with Spoiler under Steady Flow Conditions" Journal of Marine Science and Engineering 7, no. 12: 456. https://doi.org/10.3390/jmse7120456
APA StyleLee, W. -D., Jo, H. -J., Kim, H. -S., Kang, M. -J., Jung, K. -H., & Hur, D. -S. (2019). Experimental and Numerical Investigation of Self-Burial Mechanism of Pipeline with Spoiler under Steady Flow Conditions. Journal of Marine Science and Engineering, 7(12), 456. https://doi.org/10.3390/jmse7120456