Numerical Study of Turbulent Air and Water Flows in a Nozzle Based on the Coanda Effect

 , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. Methodology
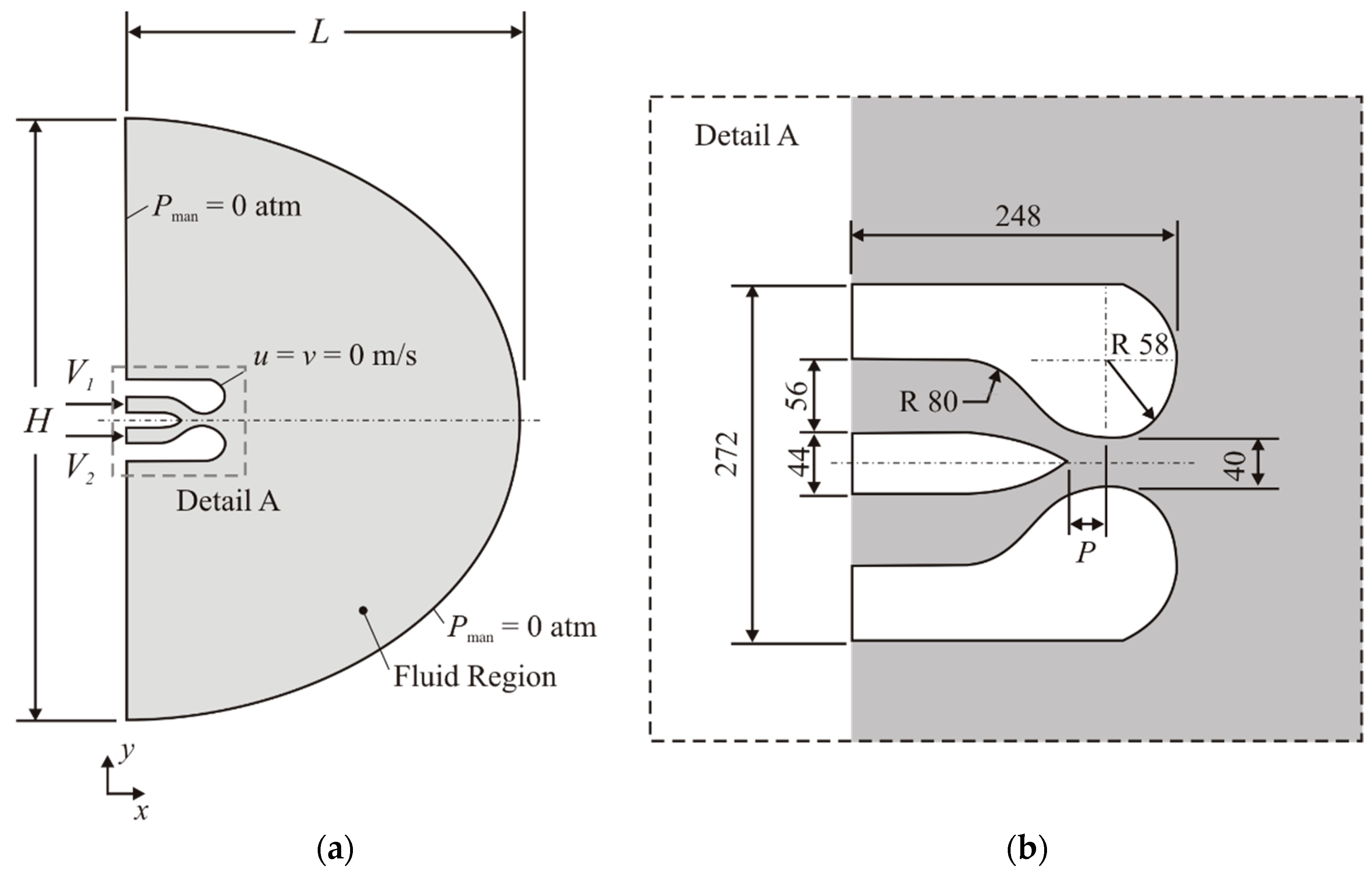
2.1. Description of the Problem
2.2. Mathematical and Numerical Modeling
3. Results and Discussion
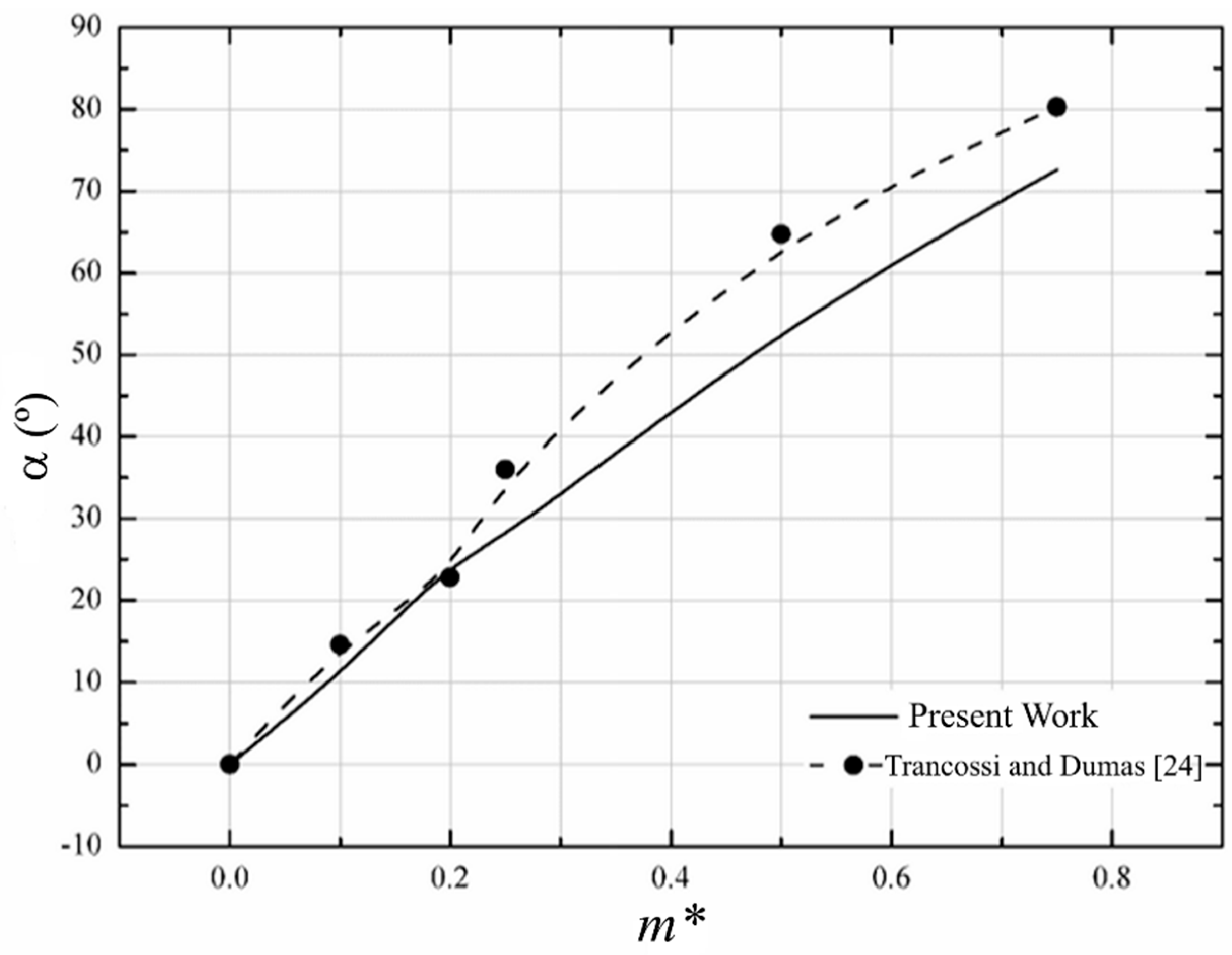
3.1. Computational Model Verification
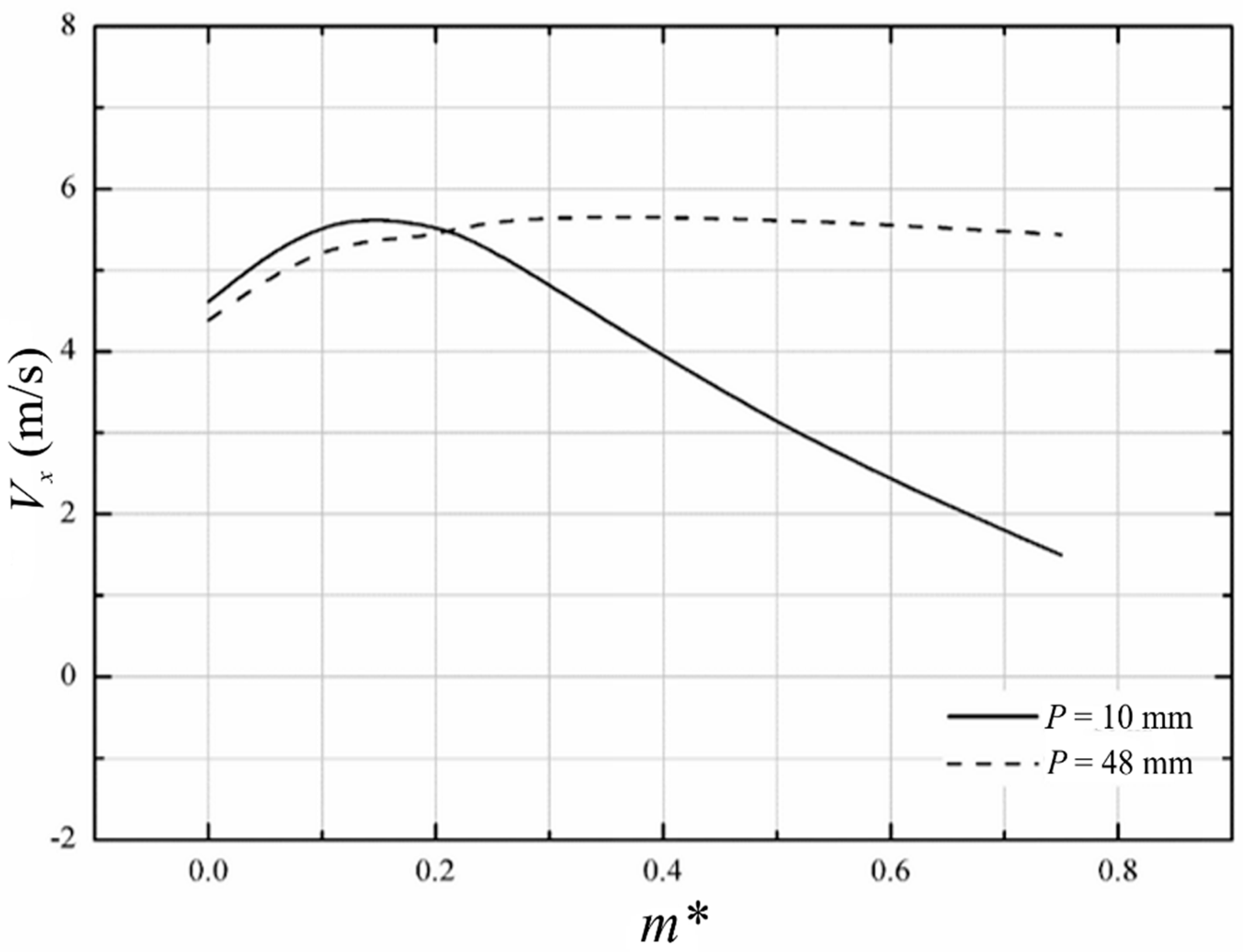
3.2. Results for Water Flows in the H.O.M.E.R. Nozzle
4. Conclusions
Authors Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A1. List of Symbols
| H | Height of domain (mm) |
| k | Turbulent kinetic energy (m2 s–2) |
| L | Length of domain (mm) |
| m* | Dimensionless mass flow rate |
| Mass flow rate on the superior channel (kg s–1) | |
| Mass flow rate on the inferior channel (kg s–1) | |
| P | Septum insertion distance (mm) |
| p | Pressure (Pa) |
| ui | Velocity in the i–direction (m s–1) |
| V1 | Velocity at the inlet of the superior channel (m s–1) |
| V2 | Velocity at the inlet of the inferior channel (m s–1) |
| xi | Spatial coordinate in the i–direction (m) |
| ʹ | Fluctuation fields of pressure and velocity |
| — | Time average operator |
| α | Deflection angle of the mixed jet (°) |
| δij | Kronecker delta |
| ε | Dissipation rate (m² s–3) |
| µ | Dynamic viscosity (kg m–1 s–1) |
| µT | Turbulent eddy viscosity (kg m–1 s–1) |
| ρ | Density (kg m–3) |
Appendix A2. List of Abbreviations
| ACHEON | Aerial Coanda High Efficiency Orienting Nozzle |
| CFD | Computational Fluid Dynamics |
| FVM | Finite Volume Method |
| H.O.M.E.R. | High-Speed Orienting Momentum with Enhanced Reversibility |
| SIMPLEC | Semi-Implicit Method for Pressure Linked Equations-Consistent algorithm |
References
- Coanda, H. Device for Deflecting a Stream of Elastic Fluid Projected into an Elastic Fluid. U.S. Patent 2,052,869, 1 September 1936. [Google Scholar]
- Constantin, O. Fluidic Elements based on Coanda Effect. Incas Bull. 2010, 2, 163–172. [Google Scholar] [CrossRef]
- Schuh, H.; Persson, B. Heat transfer on circular cylinders exposed to free-jet flow. Int. J. Heat Mass Transf. 1964, 7, 1257–1271. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Wille, R. Der Einfluß von Nadeln auf die Kühlung von kurzen Kreiszylindern bei Freistrahlanblasung. Glastechn. Ber. 1959, 32, 397–401. [Google Scholar]
- Sidiropoulos, V.; Vlachopoulos, J. An Investigation of Venturi and Coanda Effects in Blown Film Cooling. Int. Polym. Process. 2000, 15, 40–45. [Google Scholar] [CrossRef]
- Stewart, B.A. Safety Device with Coanda Effect. U.S. Patent 3,909,037, 30 September 1975. [Google Scholar]
- Wing, D.J. Static Investigation of Two Fluidic Thrust-Vectoring Concepts on a Two-Dimensional Convergent-Divergent Nozzle; NASA: Washington, DC, USA, 1994.
- Mason, M.S.; Crowther, W.J. Fluidic thrust vectoring of low observable aircraft. In Proceedings of the CEAS Aerospace Aerodynamic Research Conference, Cambridge, UK, 10–12 June 2002. [Google Scholar]
- Trancossi, M.; Madonia, M.; Dumas, A.; Angeli, D.; Bingham, C.; Das, S.S.; Grimaccia, F.; Marques, J.P.; Porreca, E.; Smith, T.; et al. A New Aircraft Architecture based on the ACHEON Coanda Effect Nozzle: Flight Model and Energy Evaluation. Eur. Transp. Res. Rev. 2016, 8, 11. [Google Scholar] [CrossRef]
- Ahmed, R.I.; Abu Talib, A.R.; Mohd Rafie, A.S.; Djojodihardjo, H. Aerodynamics and flight mechanics of MAV based on Coanda Effect. Aerosp. Sci. Technol. 2017, 62, 136–147. [Google Scholar] [CrossRef]
- Lemos, R.; Vieira, R.S.; Isoldi, L.A.; Rocha, L.A.O.; Pereira, M.S.; Dos Santos, E.D. Numerical analysis of a turbulent flow with Coanda effect in hydrodynamics profiles. FME Trans. 2017, 45, 412–420. [Google Scholar] [CrossRef] [Green Version]
- Seo, D.-W.; Oh, J.; Jang, J. Performance Analysis of a Horn-Type Rudder Implementing the Coanda Effect. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 177–184. [Google Scholar] [CrossRef]
- Kulfan, B.M. Universal Parametric Geometry Representation Method. J. Aircr. 2008, 45, 142–158. [Google Scholar] [CrossRef]
- Barlow, C.; Lewis, D.; Prior, S.D.; Odedra, S.; Erbil, M.A.; Karamanoglu, M.; Collins, R. Investigating the use of the Coanda Effect to Create Novel Unmanned Aerial Vehicles. In Proceedings of the International Conference on Manufacturing and Engineering Systems; ACM: New York, NY, USA, 2009; pp. 386–391. [Google Scholar]
- Mirkov, N.; Rašuo, B. Numerical Simulation of Air Jet Attachment to Convex Walls and Applications. In Proceedings of the 27th ICAS Congress, Nice, France, 19–24 September 2010; Curran Associates, Inc.: Red Hook, NY, USA, 2010; pp. 1–7. [Google Scholar]
- Mirkov, N.; Rašuo, B. Manuverability of an UAV with Coanda Effect Based Lift Production. In Proceedings of the 28th ICAS Congress, Brisbane, Australia, 23–28 September 2012; ICAS: Bonn, Germany, 2012; pp. 1–6. [Google Scholar]
- Mirkov, N.; Rašuo, B. Numerical simulation of air jet attachment to convex walls and application to UAV. In Boundary and Interior Layers, Computational and Asymptotic Methods; Lecture Notes in Computational Science and Engineering; Knobloch, P., Ed.; Springer: Cham, Switzerland, 2015; Volume 108, pp. 197–208. [Google Scholar] [CrossRef]
- Ameri, M. An Experimental and Theoretical Study of Coanda Ejectors. Ph.D. Thesis, Case Western Reserve University, Cleveland, OH, USA, 1993. [Google Scholar]
- Kim, H.D.; Rajesh, G.; Setoguchi, T.; Matsuo, S. Optimization study of a Coanda ejector. J. Therm. Sci. 2006, 15, 331–336. [Google Scholar] [CrossRef]
- Djojodihardjo, H.; Abdulhamid, M.F.; Basri, S.; Romli, S.I.; Abdul Majid, D.L.A. Numerical Simulation and Analysis of Coanda Effect Circulation Control for Wind-Turbine Application Considerations. IIUM Eng. J. 2011, 12, 19–42. [Google Scholar]
- Gan, C.; Sahari, K.S.M.; Tan, C. Numerical investigation on Coanda flow over a logarithmic surface. J. Mech. Sci. Technol. 2015, 29, 2863–2869. [Google Scholar] [CrossRef]
- Greitsch, L.; Eljardt, G.; Krueger, S. Operating conditions aligned ship design and evaluation. In Proceedings of the 1st International Symposium on Marine Propulsors, Trondheim, Norway, 22–24 June 2009. [Google Scholar]
- Dumas, A.; Pascoa, J.; Trancossi, M.; Tacchini, A.; Ilieva, G.; Madonia, M. Acheon project: A novel vectoring jet concept. In Proceedings of the ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 9–15 November 2012; pp. 499–508. [Google Scholar]
- Trancossi, M.; Dumas, A. Coanda Synthetic Jet Deflection Apparatus and Control; No. 2011-01-2590. SAE Technical Paper; SAE: Warrendale, PA, USA, 2011. [Google Scholar]
- ANSYS Inc. Ansys 14.0—FLUENT User’s Guide; ANSYS Inc.: Canonsburg, PA, USA, 2011. [Google Scholar]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson: London, UK, 2007. [Google Scholar]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Models of Turbulence; Academic Press: London, UK, 1972. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD, 3rd ed.; DCW Industries: La Cañada Flintridge, CA, USA, 2006. [Google Scholar]
- Pinelli, A.; Naqavi, I.; Piomelli, U.; Favier, J. Immersed-boundary methods for general finite-difference and finite-volume Navier-Stokes solvers. J. Comput. Phys. 2010, 229, 9073–9091. [Google Scholar] [CrossRef]
- Mirkov, N.; Rašuo, B.; Kenjereš, S. On the improved finite volume procedure for simulation of turbulent flows over real complex terrains. J. Comput. Phys. 2015, 287, 18–45. [Google Scholar] [CrossRef]
- Digimizer. 5.3.4, MedCalc Software Bvba. 2018. Available online: www.digimizer.com (accessed on 30 July 2018).
- Bradshaw, P. Effects of Streamline Curvature on Turbulent Flow; AGARDograph AG-169; AGARDograph: Paris, France, 1990. [Google Scholar]
- Schlichting, H. Boundary Layer Theory; Mc-Graw Hill: New York, NY, USA, 1979. [Google Scholar]
- Morgans, R.C.; Dally, B.B.; Nathan, G.J.; Lanspeary, P.V.; Fletcher, D.F. Application of the revised Wilcox (1998) k-turbulence model to a jet in co-flow. In Proceedings of the Second International Conference on CFD in the Mineral and Process Industries, Melbourne, Australia, 6–8 December 1999. [Google Scholar]
- Georgiadis, N.J.; Yoder, D.A.; Engblom, W.B. Evaluation of modified two-equation turbulence models for jet flow predictions. AIAA J. 2006, 44, 3107–3114. [Google Scholar] [CrossRef]
- Teixeira, F.B.; Lorenzini, G.; Errera, M.R.; Rocha, L.A.O.; Isoldi, L.A.; Dos Santos, E.D. Constructal Design of Triangular Arrangements of Square Bluff Bodies under Forced Convective Turbulent Flows. Int. J. Heat Mass Transf. 2018, 126, 521–535. [Google Scholar] [CrossRef]
- ANSYS Inc. Fluent, Ansys 12.0 Theory Guide; ANSYS Inc.: Canonsburg, PA, USA, 2009. [Google Scholar]
- Trancossi, M.; Stewart, J.; Maharshi, S.; Angeli, D. Mathematical model of a Constructal Coanda Effect nozzle. J. Appl. Fluid Mech. 2016, 9, 2813–2822. [Google Scholar]
- Subhash, M.; Trancossi, M.; Pascoa, J. An Insight into the Coanda Flow Through Mathematical Modeling. In Modeling and Simulation in Industrial Engineering; Springer: Cham, Switzerland, 2018; pp. 101–114. [Google Scholar]
- Mishra, A.A.; Iaccarino, G. Uncertainty Estimation for Reynolds-Averaged Navier Stokes Predictions of High-Speed Aircraft Nozzle Jets. AIAA J. 2017, 55, 3999–4004. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.09 | 1.44 | 1.92 | 1.3 | 1.0 |
| m* | ||
|---|---|---|
| 0.00 | 4.0 | 4.0 |
| 0.10 | 4.4 | 3.6 |
| 0.20 | 4.8 | 3.2 |
| 0.25 | 5.0 | 3.0 |
| 0.50 | 6.0 | 2.0 |
| 0.75 | 7.0 | 1.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Halal, Y.; Marques, C.H.; Rocha, L.A.O.; Isoldi, L.A.; Lemos, R.d.L.; Fragassa, C.; dos Santos, E.D. Numerical Study of Turbulent Air and Water Flows in a Nozzle Based on the Coanda Effect. J. Mar. Sci. Eng. 2019, 7, 21. https://doi.org/10.3390/jmse7020021
El Halal Y, Marques CH, Rocha LAO, Isoldi LA, Lemos RdL, Fragassa C, dos Santos ED. Numerical Study of Turbulent Air and Water Flows in a Nozzle Based on the Coanda Effect. Journal of Marine Science and Engineering. 2019; 7(2):21. https://doi.org/10.3390/jmse7020021
Chicago/Turabian StyleEl Halal, Youssef, Crístofer H. Marques, Luiz A. O. Rocha, Liércio A. Isoldi, Rafael de L. Lemos, Cristiano Fragassa, and Elizaldo D. dos Santos. 2019. "Numerical Study of Turbulent Air and Water Flows in a Nozzle Based on the Coanda Effect" Journal of Marine Science and Engineering 7, no. 2: 21. https://doi.org/10.3390/jmse7020021
APA StyleEl Halal, Y., Marques, C. H., Rocha, L. A. O., Isoldi, L. A., Lemos, R. d. L., Fragassa, C., & dos Santos, E. D. (2019). Numerical Study of Turbulent Air and Water Flows in a Nozzle Based on the Coanda Effect. Journal of Marine Science and Engineering, 7(2), 21. https://doi.org/10.3390/jmse7020021