1. Introduction
The modeling of the interactions between forcing agents, e.g., waves and wind, and maritime structures is a challenging problem with important applications in coastal engineering. In the last decades, environmentally friendly coastal structures, such as partially submerged barriers, have become of great interest due to their frequent use in environmental protection, recreation, or wave energy extraction facilities. This type of barrier can reduce the wave energy inside a harbor or a marina while allowing sediment and water exchanges [
1,
2]. At the same time, these structures can be designed towards wave energy extraction when considering an oscillating water column (OWC) wave energy converter (WEC). Many experimental and theoretical studies have been performed to evaluate their efficiency and hydrodynamic behavior under regular and irregular waves.
Dean, (2008), Ursell and Dean, (1947) [
3,
4] first studied the wave reflection of incident progressive waves on a fully and partially submerged vertical barrier. Losada et al., (1992) [
5] studied the linear theory for periodic waves impinging obliquely on a vertical thin barrier, using the eigenfunction expansion method. This study was then extended to analyze oblique modulated waves [
6]. Linear theory was also applied to analyze the scattering of irregular waves impinging on fixed vertical thin barriers, with a good agreement between the analytical model and experimental data by other authors [
7]. Koutandos et al., (2010) [
1] presented an experimental study of waves acting on a partially submerged breakwater with four different configurations, including a single fixed barrier under regular and irregular waves in shallow and intermediate water. The results showed the effect of the various configurations on transmission, reflection, and energy dissipation, highlighting that the main governing design parameter could change depending on forcing conditions (for short waves the main parameter was the submergence of the barrier, for long waves it was the width of the chamber). Jalon et al., (2018) [
8] presented an analytical model to optimize the design configuration of a vertical thin barrier concerning different criteria, such as harbor tranquility or wave energy extraction. Other types of structures, e.g., slotted-, porous-, and Jarlan-type barriers, have also been widely studied [
9,
10].
Regarding the experimental studies on vertical semi-submerged barriers, Kriebel et al., (1999) [
11] studied their efficiency under regular and irregular waves in terms of the transmission and reflection coefficients, while Liu and Al-Banaa, (2004) [
2] carried out experiments under solitary waves focusing on the wave forces acting on the barrier.
Nonetheless, in nature we find swell waves coexisting with wind-driven waves. Swell waves are described as long-period waves that have been traveling for long distances and in absence of wind can be locally analyzed by means of standard wave spectra. Wind waves are actively growing due to forcing action from the local wind, and are characterized as non-regular waves consisting of a spectrum in continuous evolution. However, most of the experimental studies on wave interaction with maritime structures such as the ones mentioned, are limited to regular and/or irregular waves generated by a paddle, without considering (1) the effect of wind forcing on both the incident and reflected swell wave trains, (2) the interaction of the driven sea waves with the structure and (3) the non-linear interaction between the different wave field components. Therefore, there is still need for data on the wave-structure interaction under wind-driven waves superimposed on swell, taking into account their intrinsic irregular and random complex nature.
The present study is based on a series of laboratory experiments of wave-structure interaction with paddle-generated regular waves in combination with wind-driven waves, due to wind blowing in the direction swell propagation. The structure consists of a thin vertical semi-submerged barrier delimiting a chamber along with an impermeable back wall. This type of structures can be used in maritime engineering applications such as harbor tranquility and energy extraction [
7,
8,
12].
The manuscript is structured as follows.
Section 2 describes the adopted methodology, the experimental facility and measurements.
Section 3 contains the critical analysis of the data and the discussion. Conclusions are given in
Section 4.
3. Results and Discussion
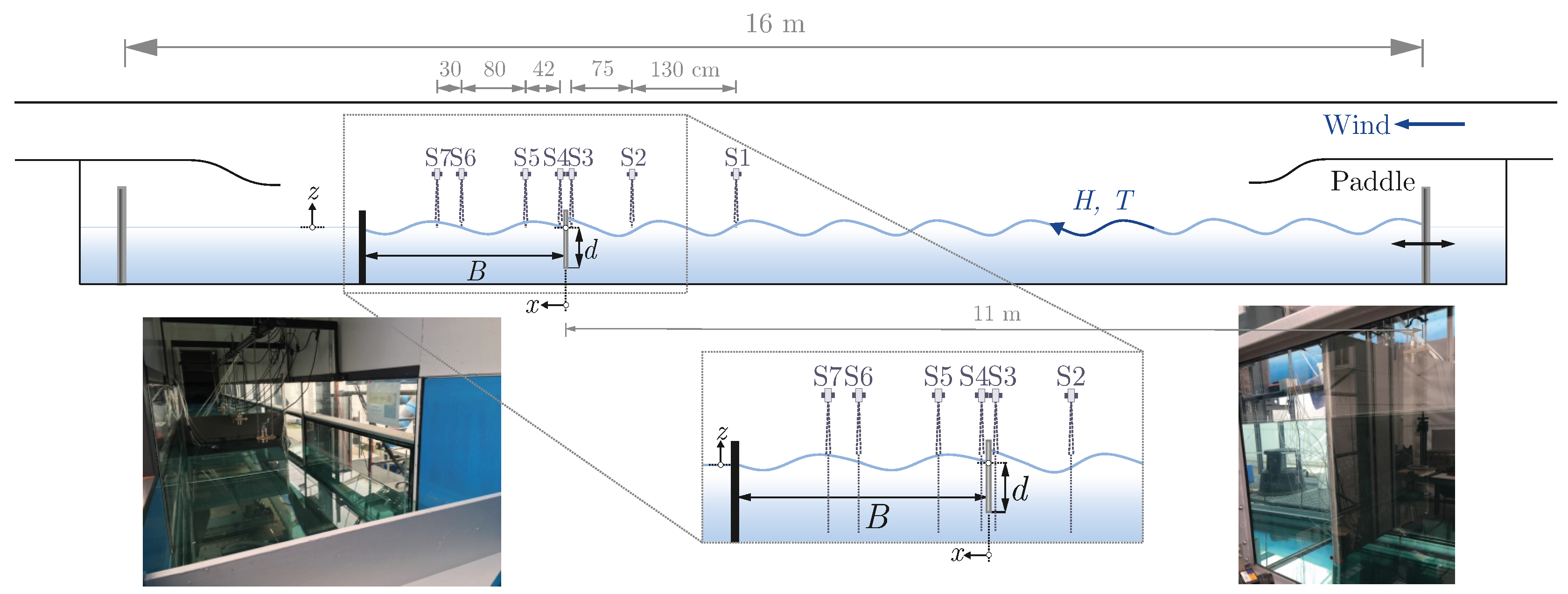
The key element of the analysis is the influence of the geometry of the system and of the wind-generated waves on the measured variables. Therefore, we analyzed the results with respect to the relative submergence and to the different . During the experiments, the relative submergence was modified by varying the submergence of the plate d whereas the water depth h was kept constant. To test different values of the relative width , the chamber width B remained fixed and different configurations of wave periods with and without the combination of wind were tested, changing the wavelength of the incident wave .
All the results presented henceforth are dimensionless with respect to the corresponding values of the measurements in absence of wind and at Section S1.
Figure 5,
Figure 6,
Figure 7 and
Figure 8 show the results for the different R1-experiments, corresponding to the same initial theoretical values
,
and wind speeds, but with a different relative submergence
(see
Table 1). The mean wave period of the regular waves (
) is very close to the 1st order natural period of the chamber, with
.
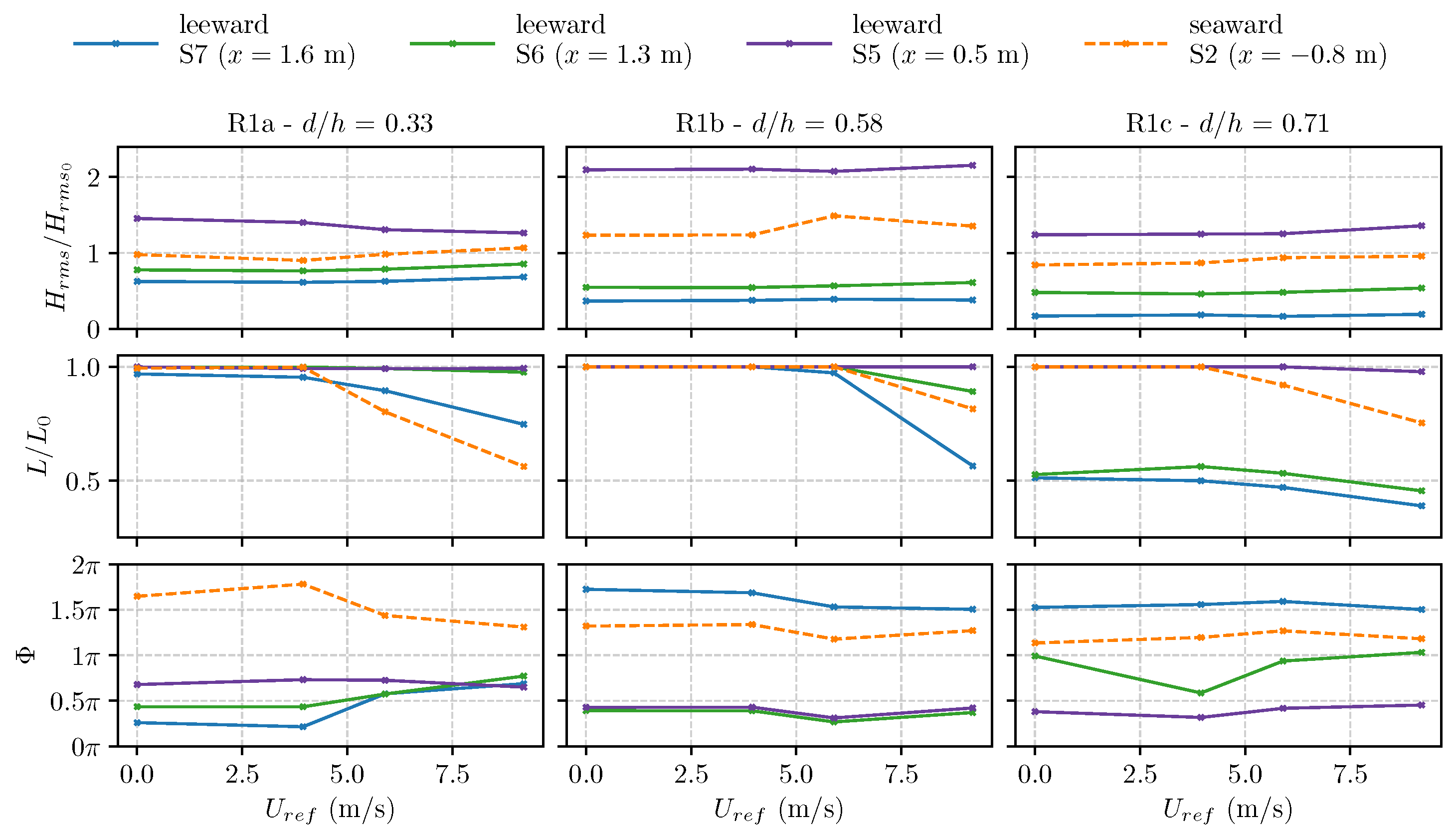
Figure 5 depicts, in the first and second row, the dimensionless r.m.s. wave height and wavelength for the gauges S2 (seaward region) and S5, S6 and S7 (leeward region) for each experiment. In the leeward region, the ratio
is related to the transmission coefficient. The third row shows the mean phase lag defined as
, with
being the angular frequency.
represents the time difference of the maximum surface elevation position between the signal of each sensor and the signal of sensor S1 within a wave period. For its calculation, the signal of each sensor is divided into waves of period
and the position of the maximum surface elevation is found.
It can be observed that for each individual sensor and experiment the wave height is constant regardless of the wind speed, showing that wind-driven waves have almost no influence in the amplification or reduction of the periodic wave inside the chamber, when
. In the case of the highest plate submergence,
(R1c), the minimum value of the wave height is observed. This result was expected, given the high reflection of the incident wave and the low energy transmitted inside the chamber. The highest values are obtained for the experiment R1b with
. In this case, S5 gives a value of
, showing a resonant behavior inside the chamber. However, a high variation between the different sensors inside the chamber is observed in this test, with values in the range 0.5–2 between the sensors S7 and S5. It can be attributed to the partial standing pattern inside the chamber that exhibits a spatial variation of the total wave amplitude with values depending on the relative distance of each gauge to quasi-nodes and quasi-antinodes. Also, the phase lag shows a similar variability, with
for sensor S5 and
for sensor S7. We notice the presence of quasi-antinodes and surface elevations in phase opposition (
) which is critical for the study of the loads acting on the plate [
8]. These results are in agreement with the results in Jalon et al., (2019) [
8], where the same structural configuration is studied analytically. The maximum values of the capture coefficient (a proxy for the transmission coefficient), with the presence of quasi-antinodes, are obtained for
(R1a-b-c-experiments).
The main influence of wind-driven waves is observed in the estimations of . As observed, decreases for increasing wind speeds and is more evident for Section S2, where the wind is expected to have a higher influence. A change of the phase lag can be observed for varying for the tests R1a and R1b, whereas for tests R1c, with , the phase lag is almost constant; however, as already highlighted, it varies considerably for different sections. This can be attributed to the fact that higher reflections are likely to be associated with higher submergences showing partial standing oscillations. Therefore, a reduction of the non-linear interaction between wind waves and the periodic component is expected.
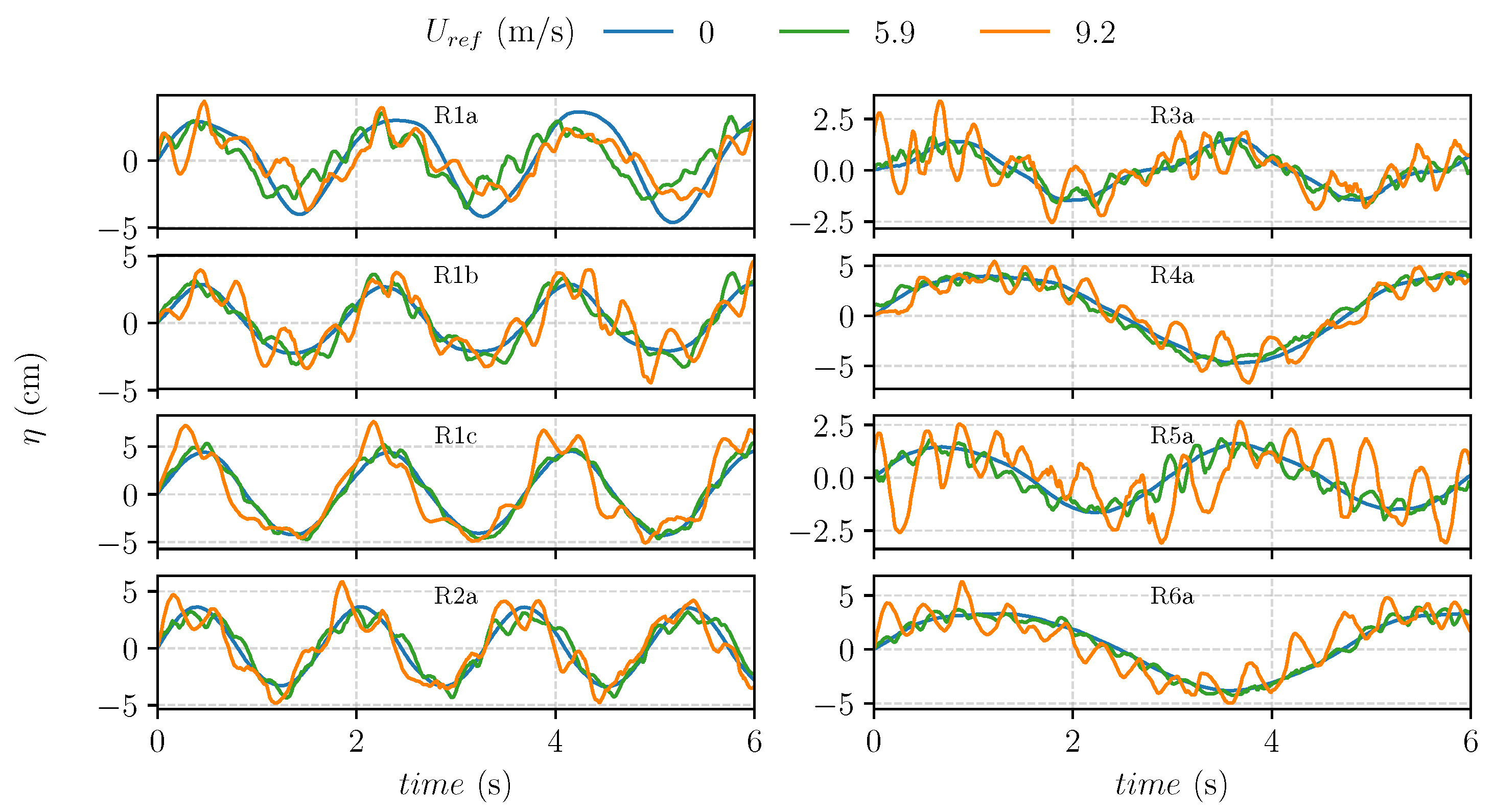
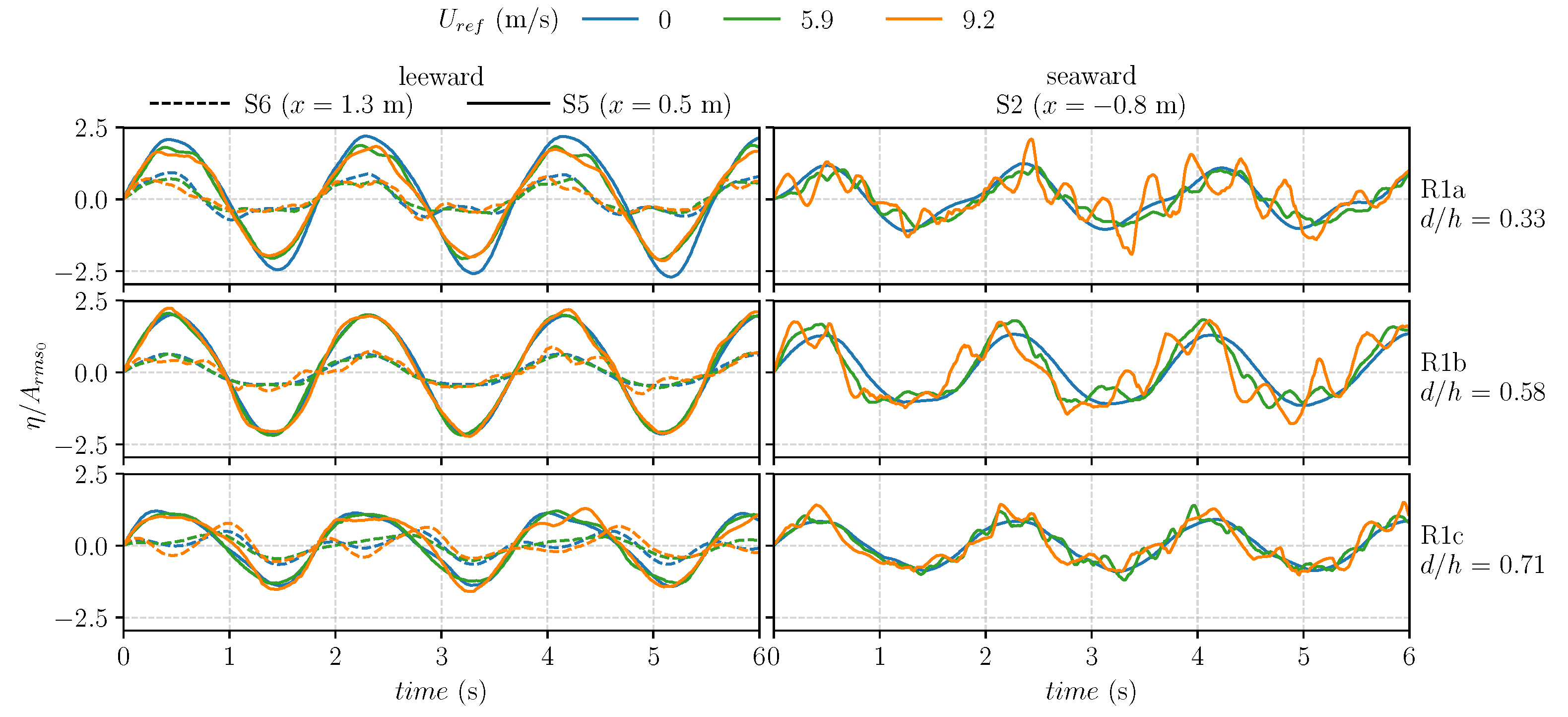
Figure 6 depicts the dimensionless surface elevation
, where
is the r.m.s. wave amplitude obtained from S1 in the absence of wind. It can be observed that the highest relative amplitude inside the chamber is given for tests with
, with almost double of the seaward wave amplitude at the Section S5 (which is very close to a quasi-antinode), for all wind speeds. The deformation of the regular wave induced by wind action in the seaward region is transmitted inside the chamber, where an asymmetry between crests and troughs is observed. This could be due to the amplification modes of the system and to the re-reflection, both controlled by geometry. In passing, we notice that free surface oscillations are strongly affected by the forcing term and by the damping, the latter mainly due to dissipation [
17]. For limited dissipation, a blow up of the oscillations is expected for multiple harmonic in the forcing term. In this respect, the free surface oscillations in the chamber can vary significantly if energy is extracted.
A similar behavior can be observed for all three values tests in Section S2 in the seaward region, where the wind generates short waves traveling alongside the long regular wave. This effect is less noticeable in the test with (R1c), where a higher reflection of the periodic wave components is expected.
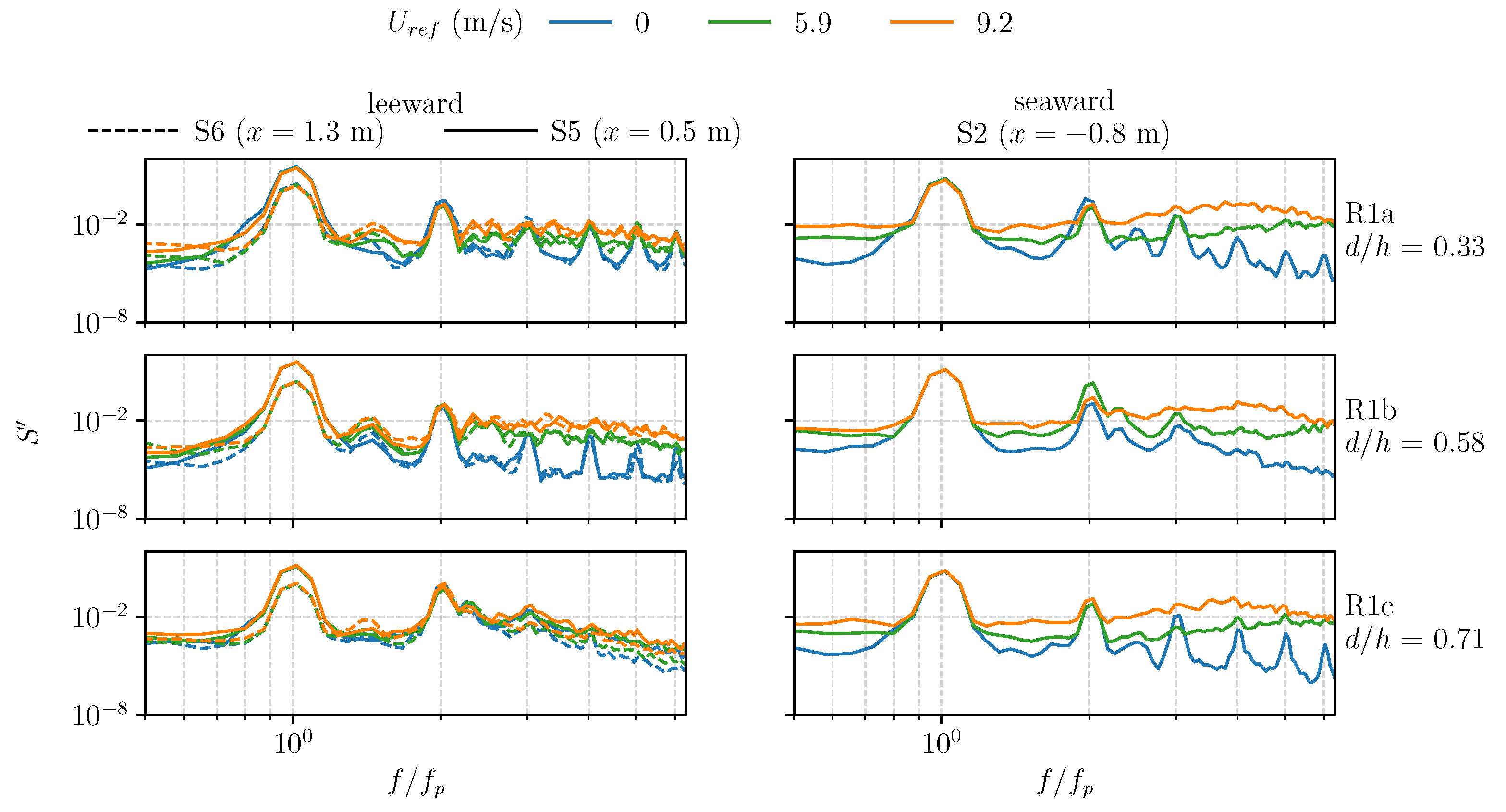
These results are mirrored in the power spectrum
shown in
Figure 7, dimensionless with respect to the peak frequency
and to the zeroth-order moment
obtained from data at Section S1 in the absence of wind. At high frequencies, the scenario is controlled by wind-driven waves, energy increases, and the resonant frequencies become less noticeable. Inside the chamber the peak frequency in all sections almost corresponds to the frequency of the regular waves, which is very close to the natural period of the chamber,
. The energy is higher for sensor S5 closest to the plate and the energy in the chamber increases with respect to the seaward region, which is associated with the peak frequency of regular waves and to the first resonant period, more so for the case with the highest relative submergence
; there is an energy decrease at higher frequencies with respect to the seaward side. This is attributed to non-linear interaction between wind-driven waves, periodic waves and resonant waves controlled by the geometry of the system and to the filtering effect of the screen, more efficient for high frequency components. For clear cut results, it will be necessary to further explore the wave profile and its variation with different geometrical configurations and with different forcing conditions.
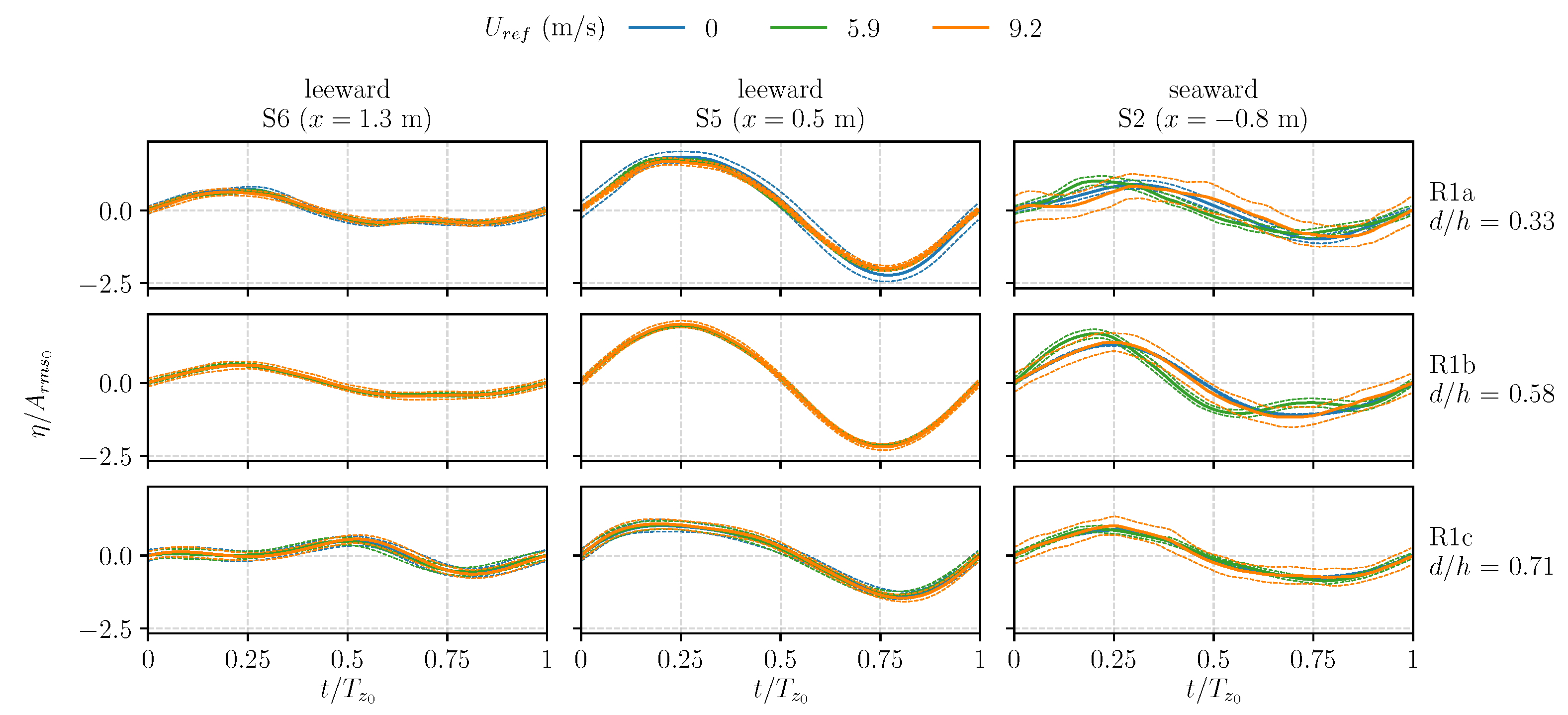
Figure 8 shows the dimensionless phase-averaged surface level for the R1a-b-c-experiments, with and without wind-driven waves and for different sensors. It can be observed that both the predominant regular wave phase, and the wave profile, change from the seaward to the leeward region. In the case of the highest relative submergence
(R1c), the transmission of the longer periodic wave is expected to be lower, and the changes could be due to the wind acting on the free surface. Sensor 5, at section
, shows a wave profile similar to the incident wave, with an increment in wave height due to its position in a quasi-antinode. Sensor 6 shows a reduction of the wave height and some changes in wave profile. As expected, due to the shading effect of the plate, the influence of wind-driven waves is limited to the seaward region, with a more evident variation of the wave profile for the case of
(R1b) and
.
To analyze the effect of the dimensionless parameter in the resonant behavior of the chamber for different wind conditions, different regular wave (paddle-generated) and wind-wave configurations were tested for a fixed relative submergence . This analysis is especially relevant for the design of OWC devices that have performance directly related to the oscillation of the water column.
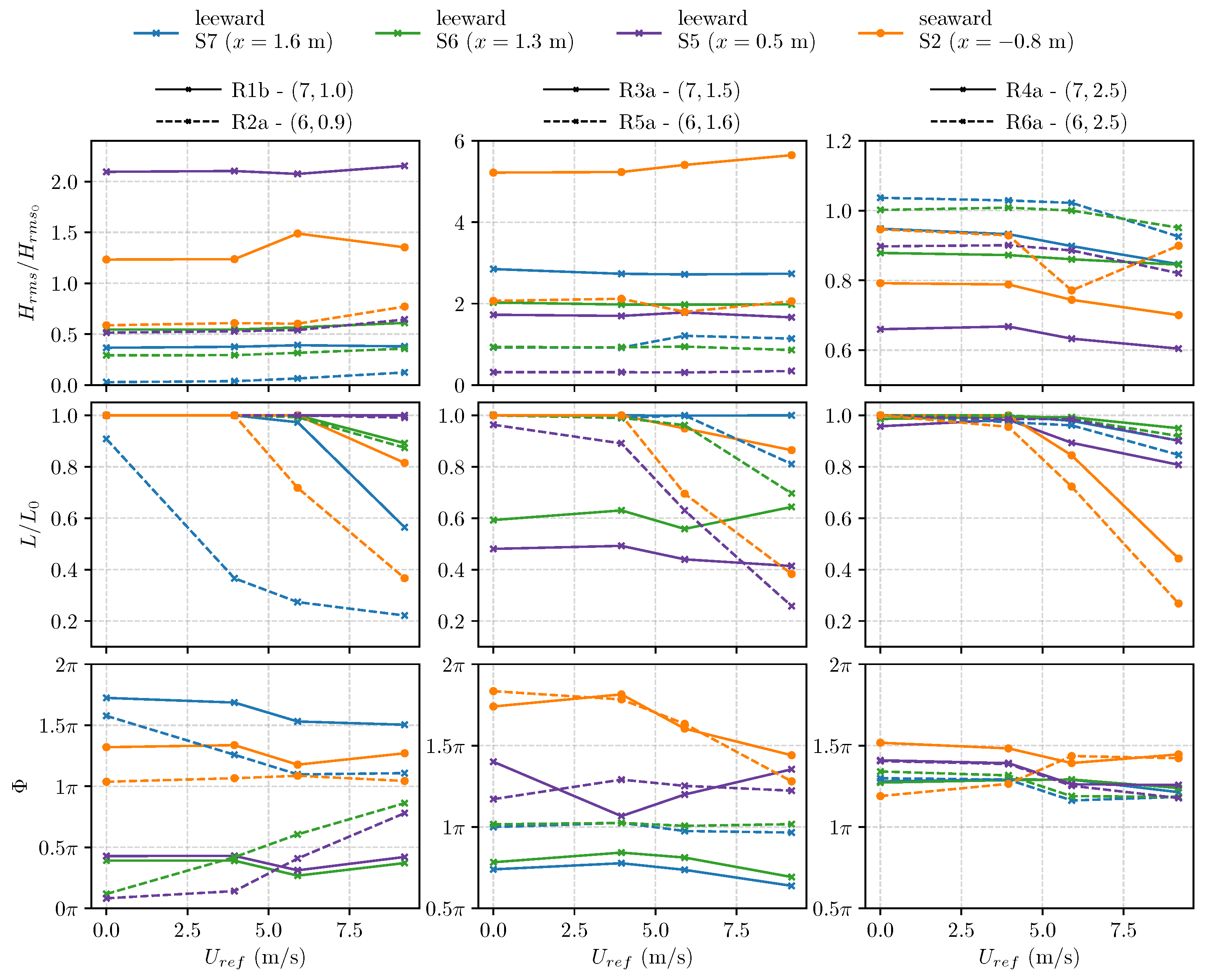
Figure 9 shows the same variables shown in
Figure 5, but the comparison is made between different regular wave experiments with the same relative submergence
. Each column represents two sets of experiments with initial theoretical values of
= 6–7 cm and similar values of
.
Values of
can be observed in the leeward region for tests with
, while at Section S2 in the seaward region, results
. We notice that the scaling value of wave height
is significantly reduced with respect to the nominal value (
Table 1). For example, R3a was carried out using a nominal wave height of
while the statistical analysis of S1 for this experiment without wind gave a value of
. In this case, at Section S2, the closest to the plate in the seaward region, very high values of r.m.s. wave height were obtained (higher reflection), with consequent very high values of
. It can also be observed that for experiments R4a and R6a, corresponding to the experiments with higher wave periods of the regular wave, there is a noticeable stronger influence of wind-driven waves than for experiments with lower wave periods, characterized by a constant value of
for the different wind speeds. A reduction of the wavelength
can be observed for increasing wind speed for almost all tests. In the seaward region, there is an almost five-fold reduction with the highest wind. In the leeward region, this influence changes depending on
, e.g., for
there is a negligible change of the wavelength with wind speed.
Another relevant indicator of the system behavior is the phase lag. For tests with the phase lag varies greatly from one sensor to the other for the same experiment, whereas for tests with results regardless of wind speed. Hence, in some tests, the relation between the period of the incident wave height and the resonant wave periods of the system plays a major role than the wind speed.
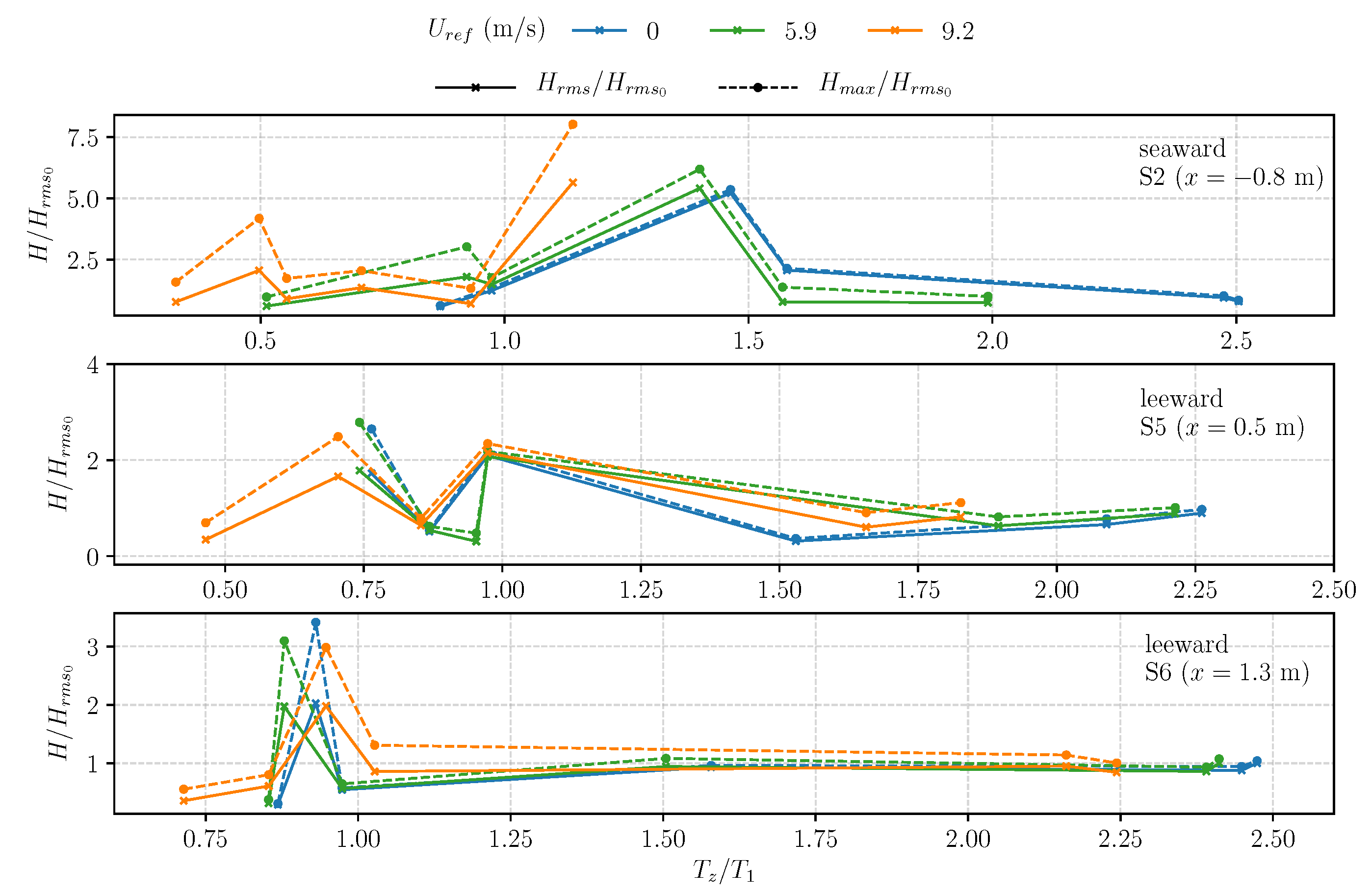
Figure 10 shows
and
of sensors S2, S5, and S6. Each point represents a different configuration of regular wave (paddle-generated) and wind speed and they were ordered according to the relation
(
x-axis) where
is the mean wave period of each sensor and case and
the 1st order natural period of the chamber. The first row presents the results for S2 (seaward region) where the highest values of
are achieved. This is due to the fact that as previously explained, in this position the regular periodic wave component is predominant over the shorter wind waves, therefore the highest values of wave height are obtained. For the sensors S5-S6 in the leeward region, an amplification of wave energy is observed for values
close to 1 for all wind speeds. For most of the experiments in the absence of wind, the same values of
and
are obtained while in tests with wind,
presents higher values than
. This is expected and due to the fact that the r.m.s. is a statistic that takes into account all the wave heights in the signal, therefore, taking into account the shorter wind-driven waves, its value is expected to be lower than
.
4. Conclusions
In the present study, the hydrodynamic interaction of regular waves, in combination with short wind-driven waves, with a vertical fixed semi-submerged barrier was experimentally investigated. The study was focused on the influence of the seaward wave characteristics and certain geometric characteristics of the structure, with special attention on the role of wind waves providing new insight of the influence of wind-driven waves on the incident wave characteristics and in the wave field inside the chamber as it still remains a topic to be further investigated in maritime and coastal engineering. A series of conclusions can be derived.
When analyzing a regular wave configuration with a wave period similar to the 1st order natural period of the chamber, an amplification of wave energy in the seaward region is measured for a relative submergence of
, in agreement with the results obtained by Jalon et al., (2019) [
8]. In the case of higher submergences, the fixed plate operates in a highly reflective manner and a reduction of the wave energy inside the chamber can be observed. Therefore, the submergence of the plate is a key parameter for the design of these types of structures, either for harbor protection (energy reduction), or WEC devices (energy amplification).
Wind-driven waves have a high influence on the wave symmetry and phase lag between the seaward and leeward regions. This is an important factor to take into account since it could lead to strong forces on the barrier when the phase lag equals .
The influence of wind waves is more noticeable for the experiments where , in which the short-crested waves proved to have a higher influence on the resulting wave periods and heights in the seaward region. Therefore, the influence of wind waves on the behavior of the structure depends greatly on the period of the predominant periodic component (swell).
The overall behavior of the system depends on the relative values of periodic waves, wind waves, and resonant periods of the chamber. The analysis has been conducted without extracting energy from the system, since no OWC device was inserted in the experimental layout. In real conditions, with an OWC device active, we expect some minor modifications, with a general reduction of the wave height in both leeward and seaward regions. In this respect, the present analysis can be confidently applied for verifying the structures in the most critical conditions.
As a future extension, this research could involve (i) the analysis of irregular waves, where is expected that wind waves effects depend on the frequency range; (ii) the analysis of grouping effects, where a sequence of grouped waves can force the system with presently unnoticed effects.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}