The Efficient Application of an Impulse Source Wavemaker to CFD Simulations





Abstract
:1. Introduction
- Replication of physical wavemakers, such as oscillating flaps, paddles or pistons
- Implementation of numerical/mathematical techniques, introducing source terms or similar into the governing equations
1.1. Impulse Source Wavemaker
1.2. Outline of the Paper
2. Implementation
2.1. The Impulse Equation
- : This is the source term used for wave generation, where r is a scalar variable that defines the wavemaker region and is the acceleration input to the wavemaker at each cell centre within r. r is dimensionless, while is given in the units of .
- : This describes a dissipation term used to implement a numerical beach, where the variable field controls the strength of the dissipation, equalling zero in the central regions of the domain where the working wavefield is required and then gradually increasing towards the boundary over the length of the numerical beach [25]. is given in units of .
2.2. Setting Parameter Values
- r is set to one in the region where the wavemaker is acting and zero everywhere else in the NWT domain. Therefore, the size of the wavemaker and its position within the NWT must also be selected. To offer guidance on the selection of the wavemaker size and position, the case study presented in Section 3 and Section 4 investigates the effect of these parameters on the wavemaker performance.
- is initialised using an analytical expression relating the value of and the geometric coordinates of the NWT. The simplest expression would be a step function, where the value of is constant inside the beach and is zero everywhere else in the NWT. However, such a sharp increase in the dissipation will cause numerical reflections. Instead, the value of should be increased gradually from the start to the end of the numerical beach. Equation (3) is used in the current implementation, which has been shown to result in sufficient absorption [25]:where is the length of the numerical beach, x is the position within the numerical beach, equalling zero at the start and increasing to at the NWT wall, and stands for the maximum value of . Guidance on the selection of the parameters and is also given in the case study (see Section 3.4.4).Perić and Abdel-Maksoud [26] recently derived an analytical solution describing the ideal setting for and validated the method in a numerical experiment, removing the need for parameter studies in the future.
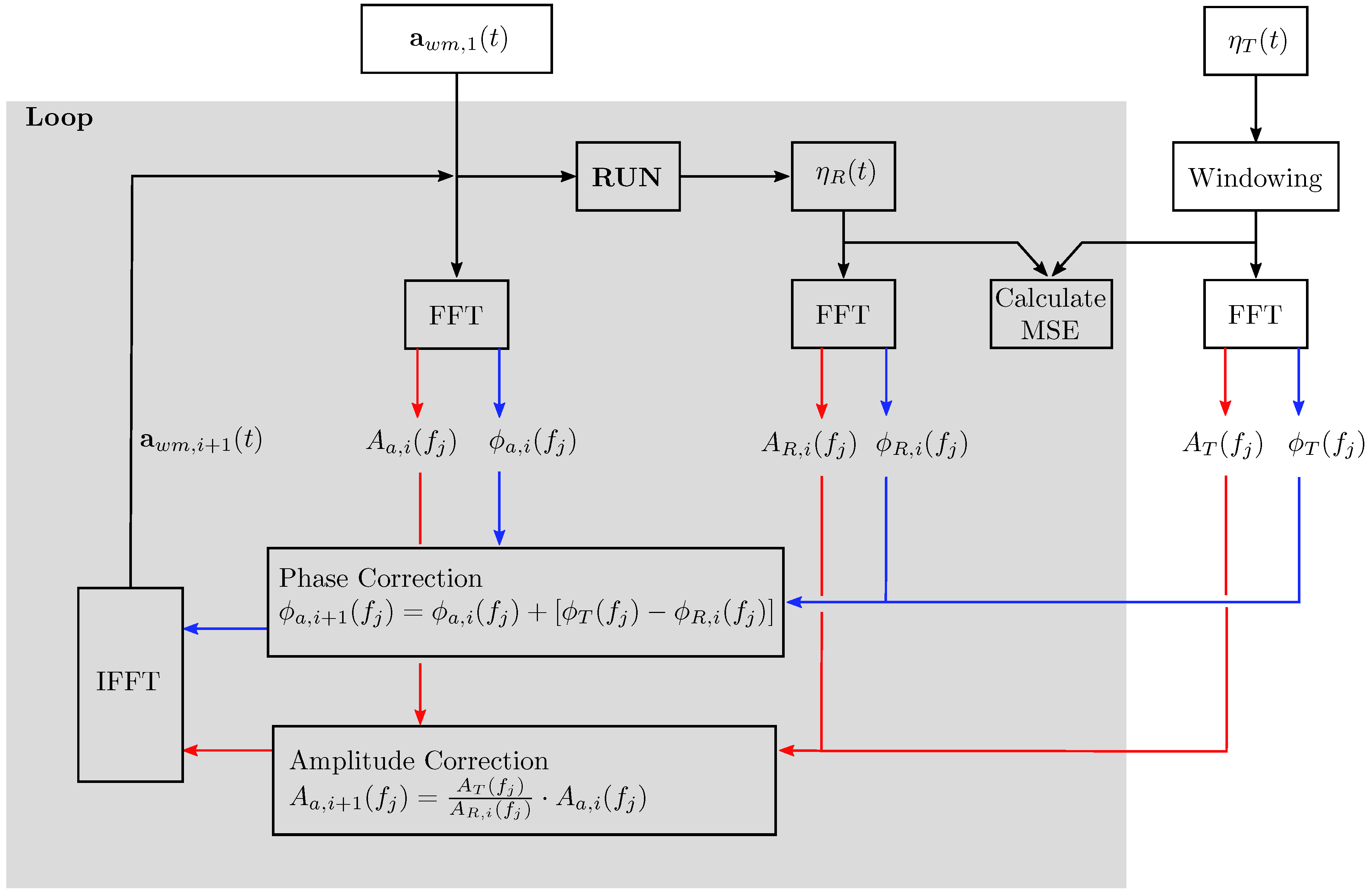
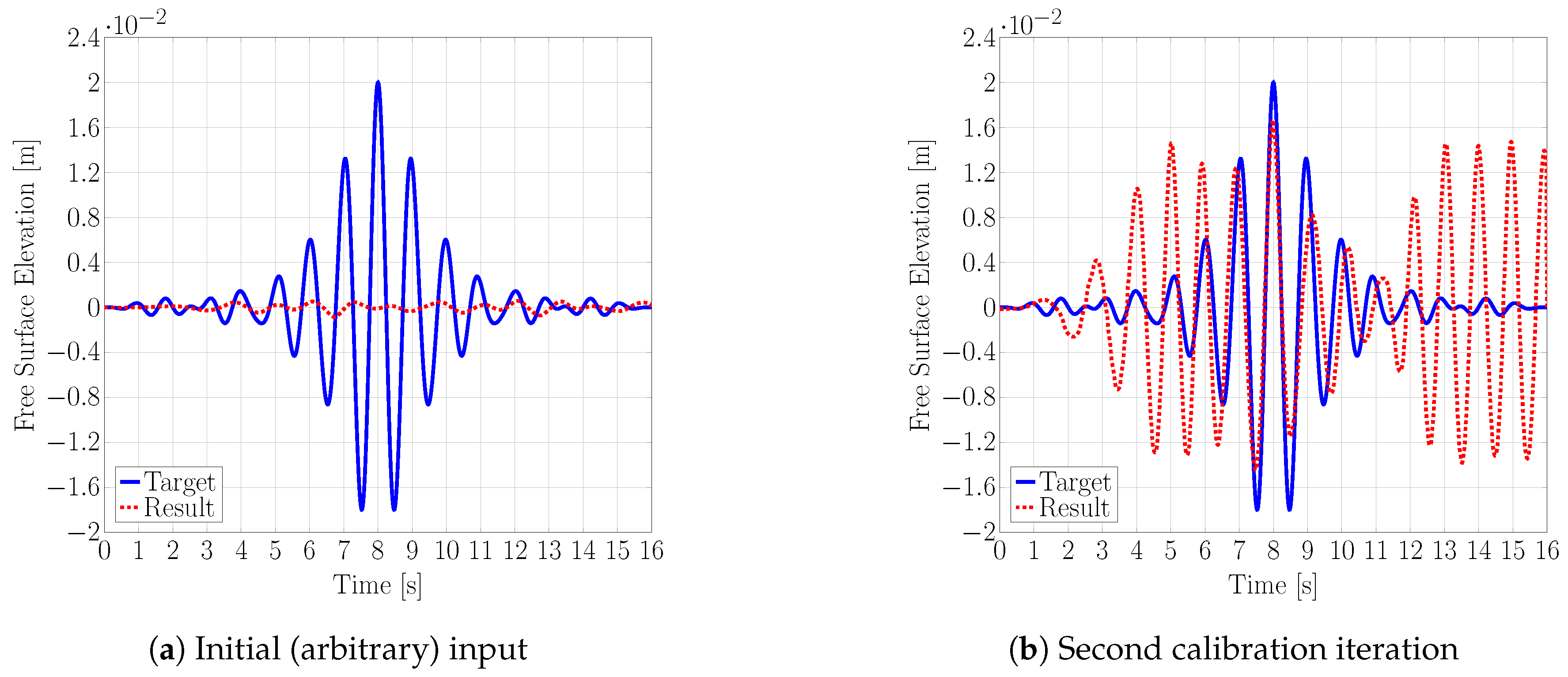
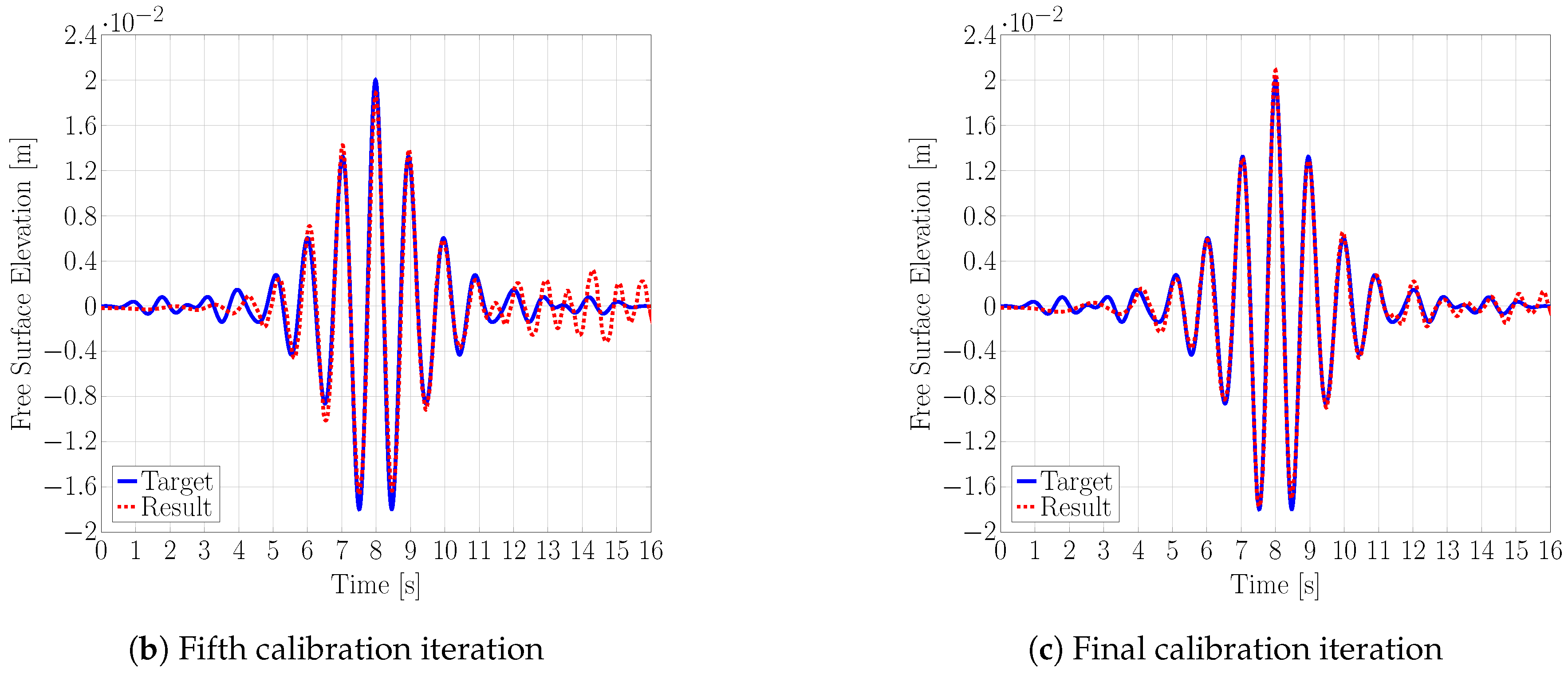
2.3. Calibration Procedure
- Define target wave series at desired NWT location, , with a signal length and samples
- Perform a Fast Fourier Transform (FFT) on , to obtain the amplitudes, , and phase components, , for each frequency component, , with , where
- Generate an initial time series for the wavemaker source term, (can be chosen randomly or informed by )
- Perform an FFT on , to obtain the amplitudes, , and phase components, , for each frequency component of the input source term
- Run the simulation, for iteration i, using the wavemaker source term , and measure the resulting free surface elevation at the chosen NWT location,
- Perform an FFT on , to obtain the amplitudes, , and phase components, , for each frequency component of the generated wave series
- Calculate the new amplitudes for each frequency component of the input source term, , by scaling the previous amplitudes, , with the ratio of target surface elevation amplitude, , and the generated surface elevation amplitude from the previous run, :
- Calculate the new phase components, , by summing with the difference between the target elevation phase, , and the measured surface elevation phase from the previous run, :
- Generate the new time series for the wavemaker source term, , by performing an inverse Fourier transform on and
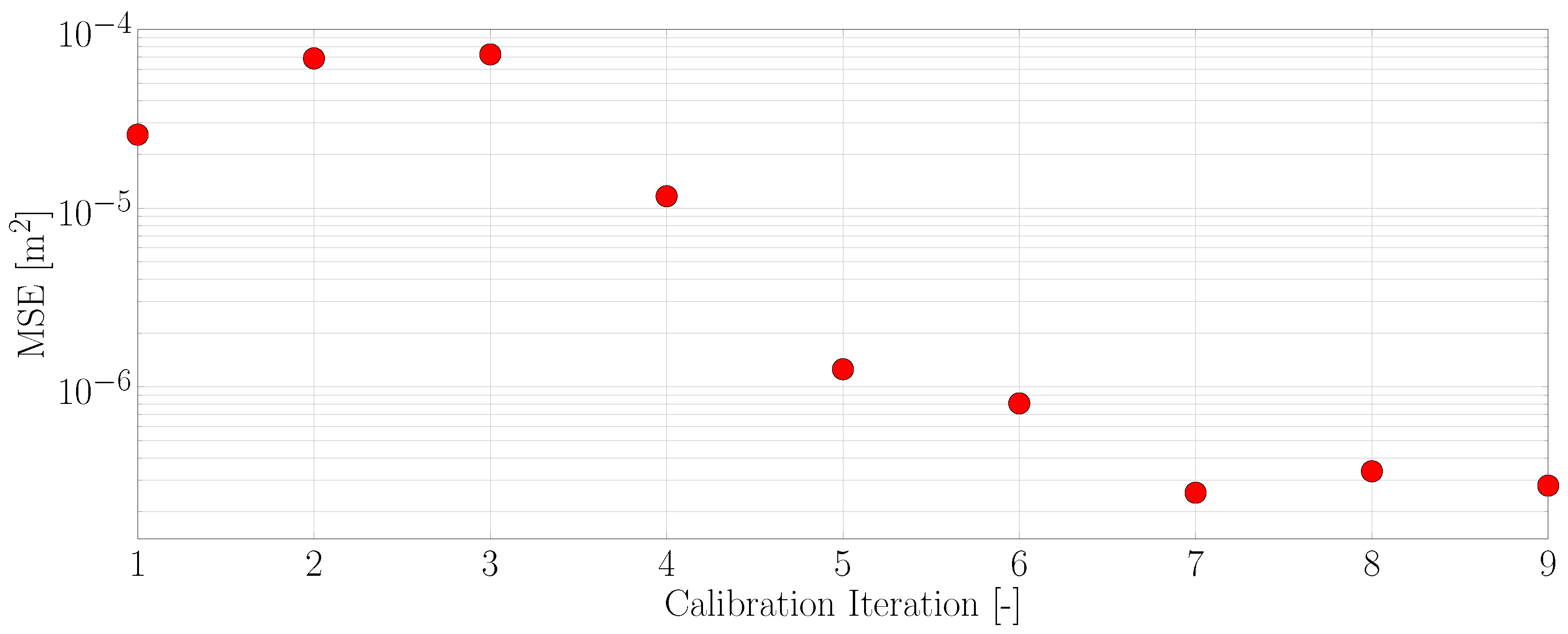
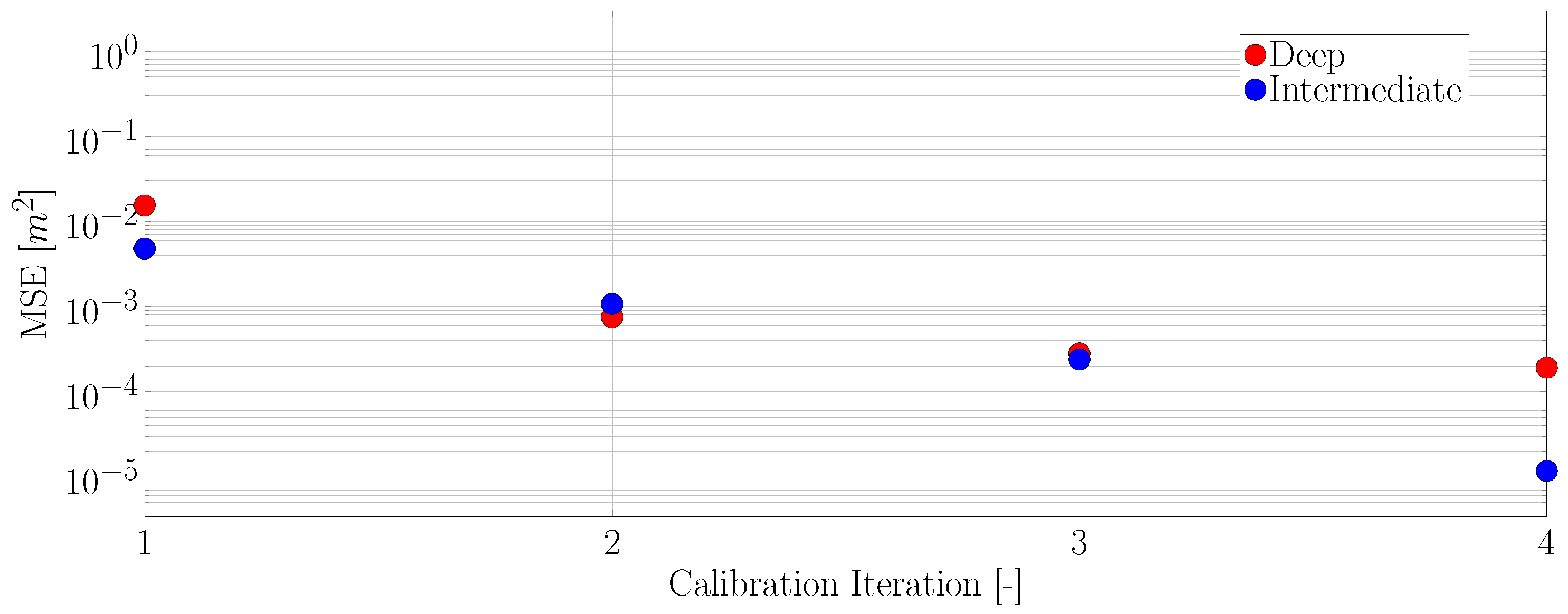
- Repeat Steps 5–9 until either a maximum number of iterations or a threshold for the Mean-Squared Error (MSE) between the target and resulting surface elevation is reached.
2.4. Calibration Procedure for Regular Waves
- The source term is set to oscillate in the horizontal direction with the desired wave frequency.
- The amplitude is initialised with an arbitrary value.
- After the initial, and each subsequent run, the surface elevation is analysed in the time domain. The mean is removed from the surface elevation. The mean wave height, , is then obtained as the difference between the mean of the positive and mean of the negative peaks.
- A new wave maker amplitude, , is obtained by linearly scaling the previous value with the ratio of target and resulting wave height, , as follows
3. Case Study
3.1. Target Waves
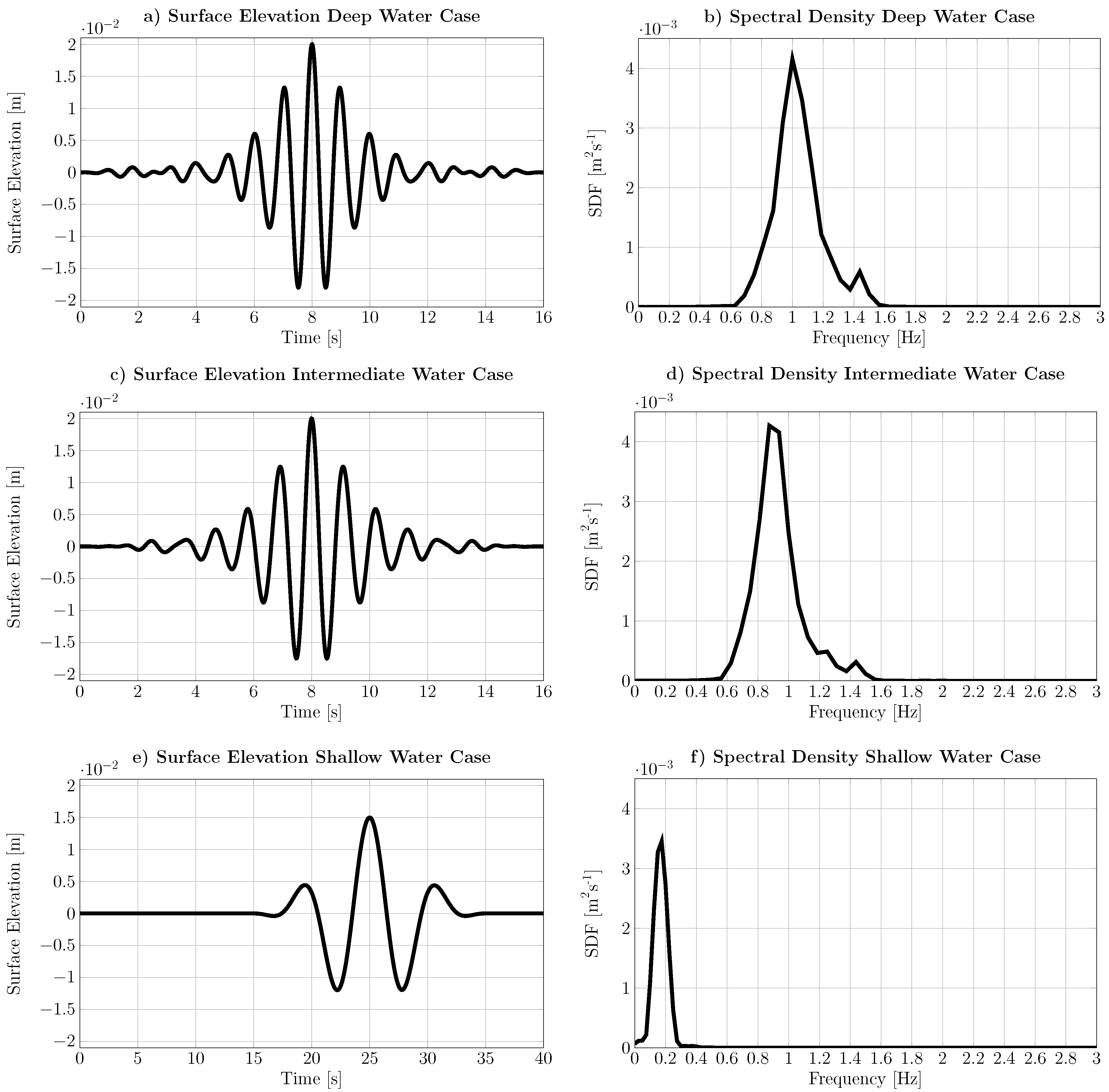
3.1.1. Multi-Frequency Wave Packet
3.1.2. Regular Waves
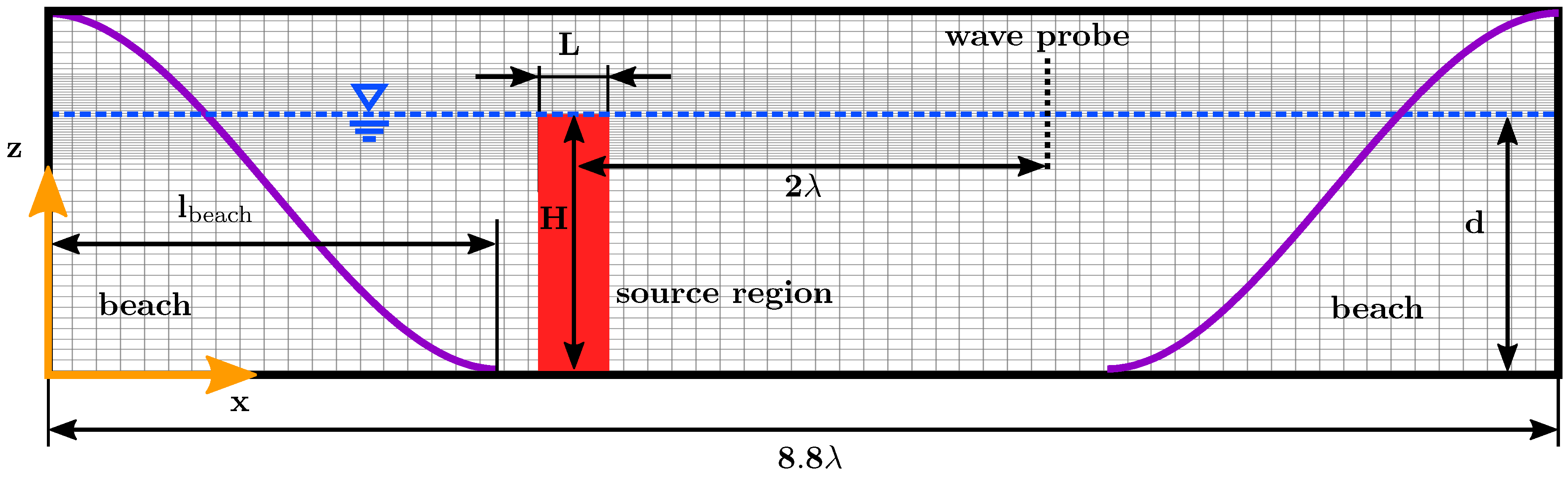
3.2. Source Region
3.3. Simulation Platform
3.4. Numerical Wave Tank Setup
3.4.1. Geometry
3.4.2. Boundary Conditions
3.4.3. Mesh
3.4.4. Calibration of the Numerical Beach
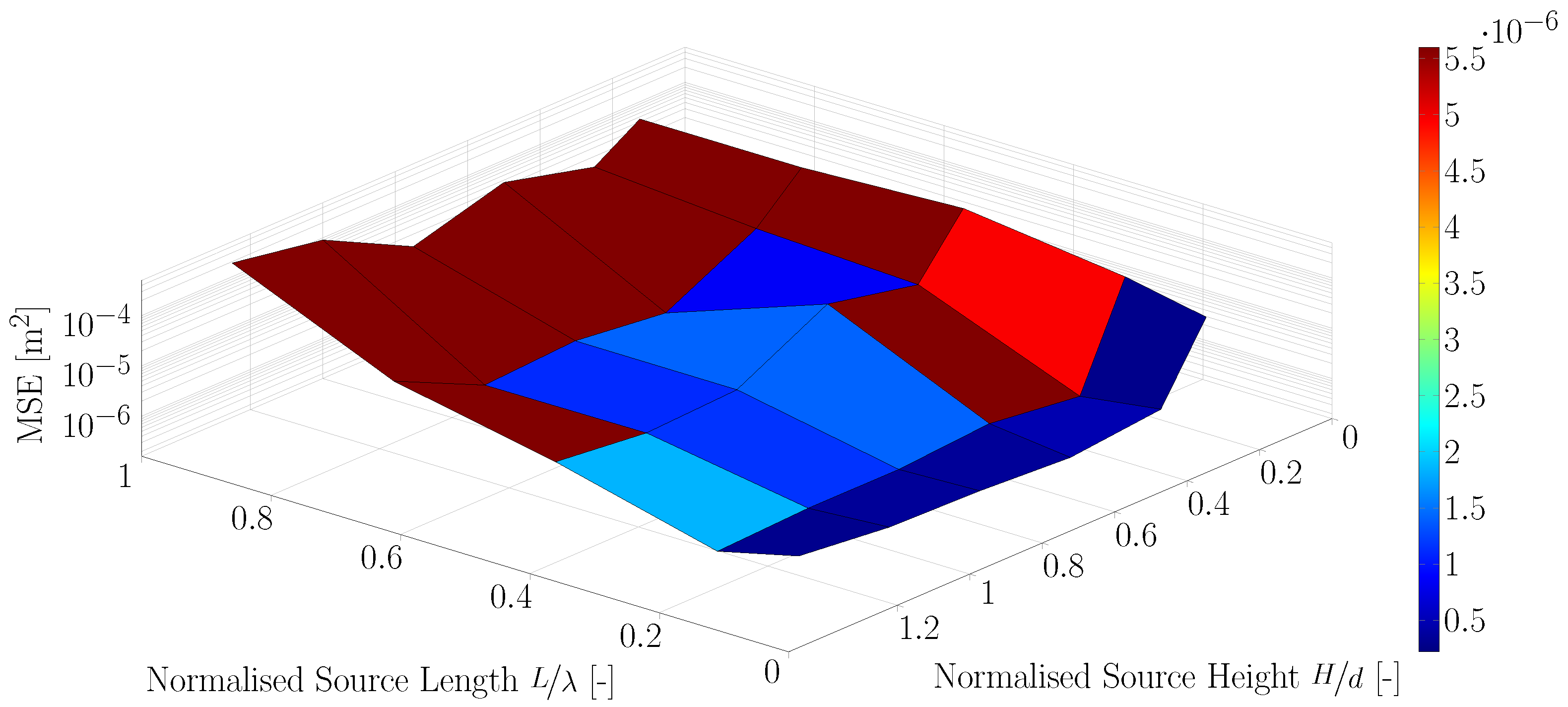
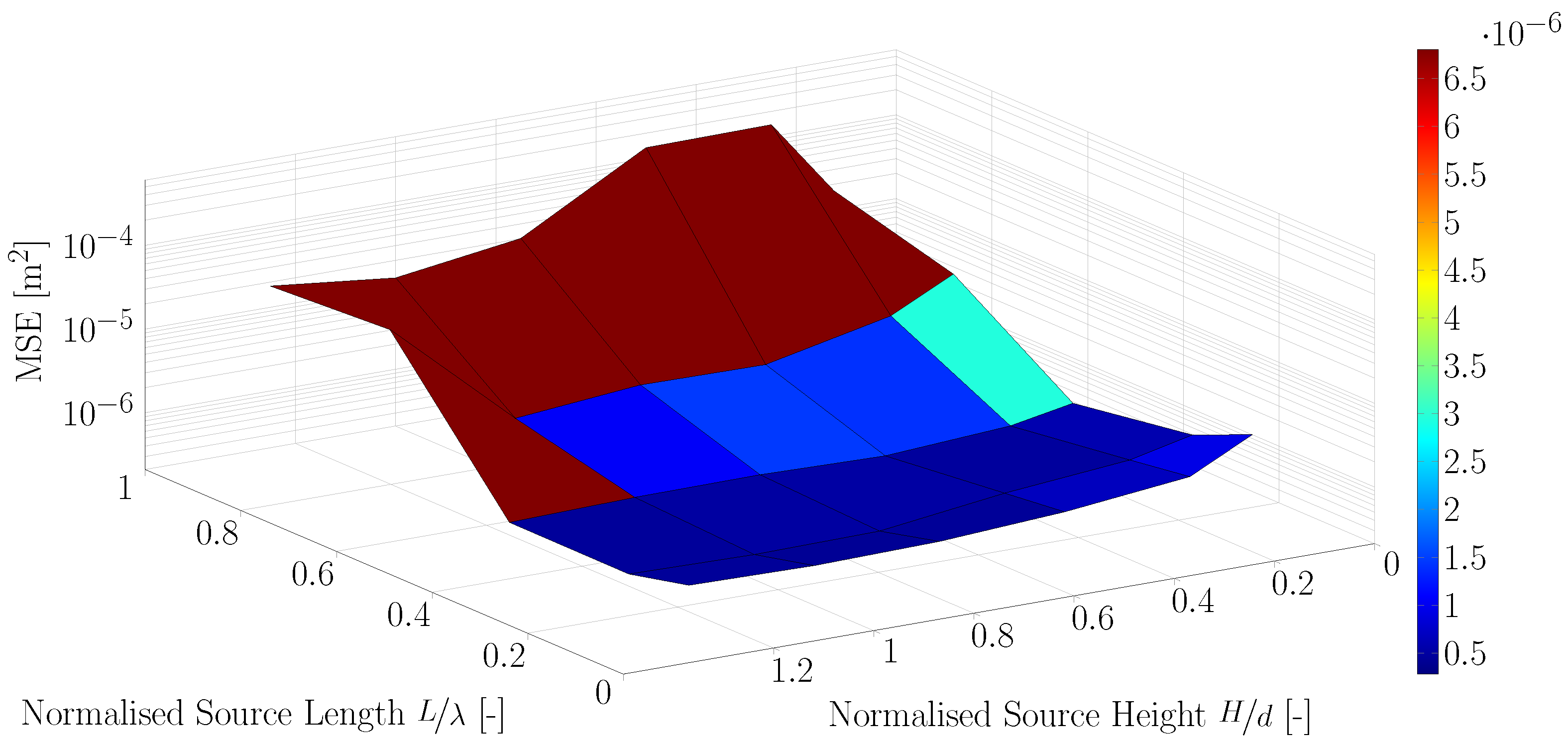
3.5. Source Region Shape and Position
4. Results and Discussion
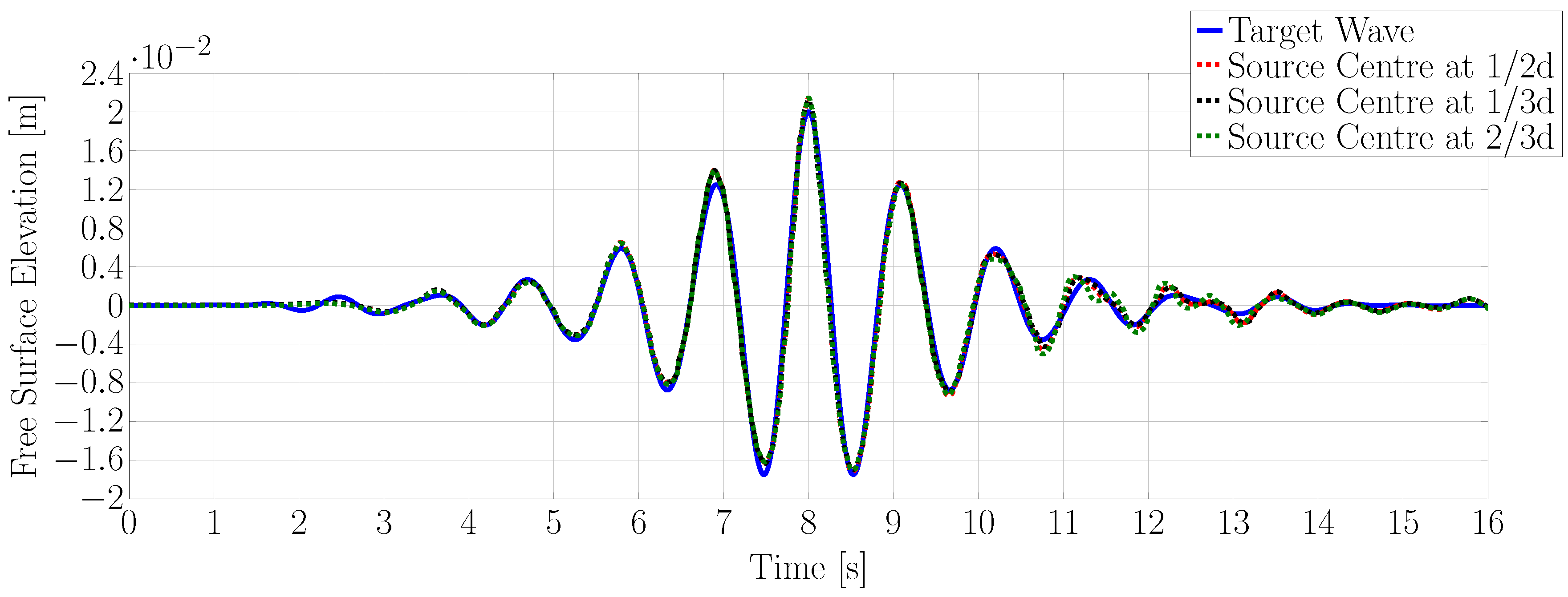
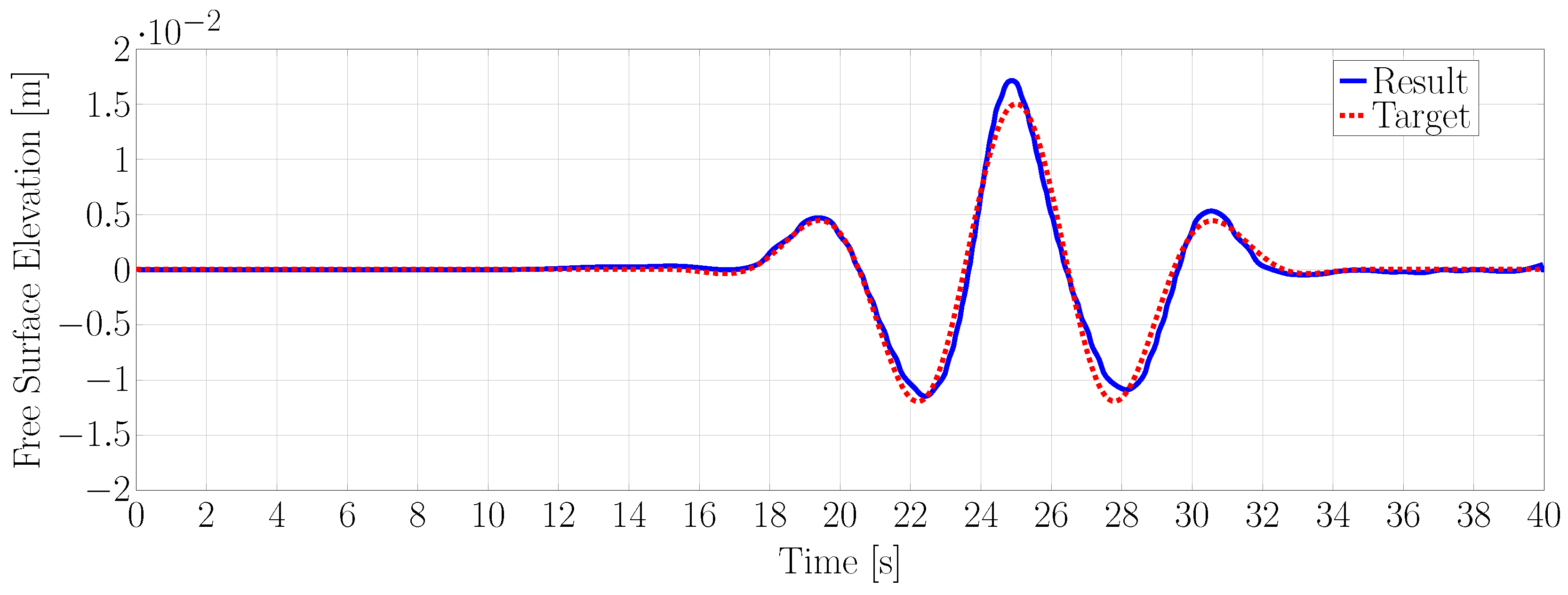
4.1. Example Result
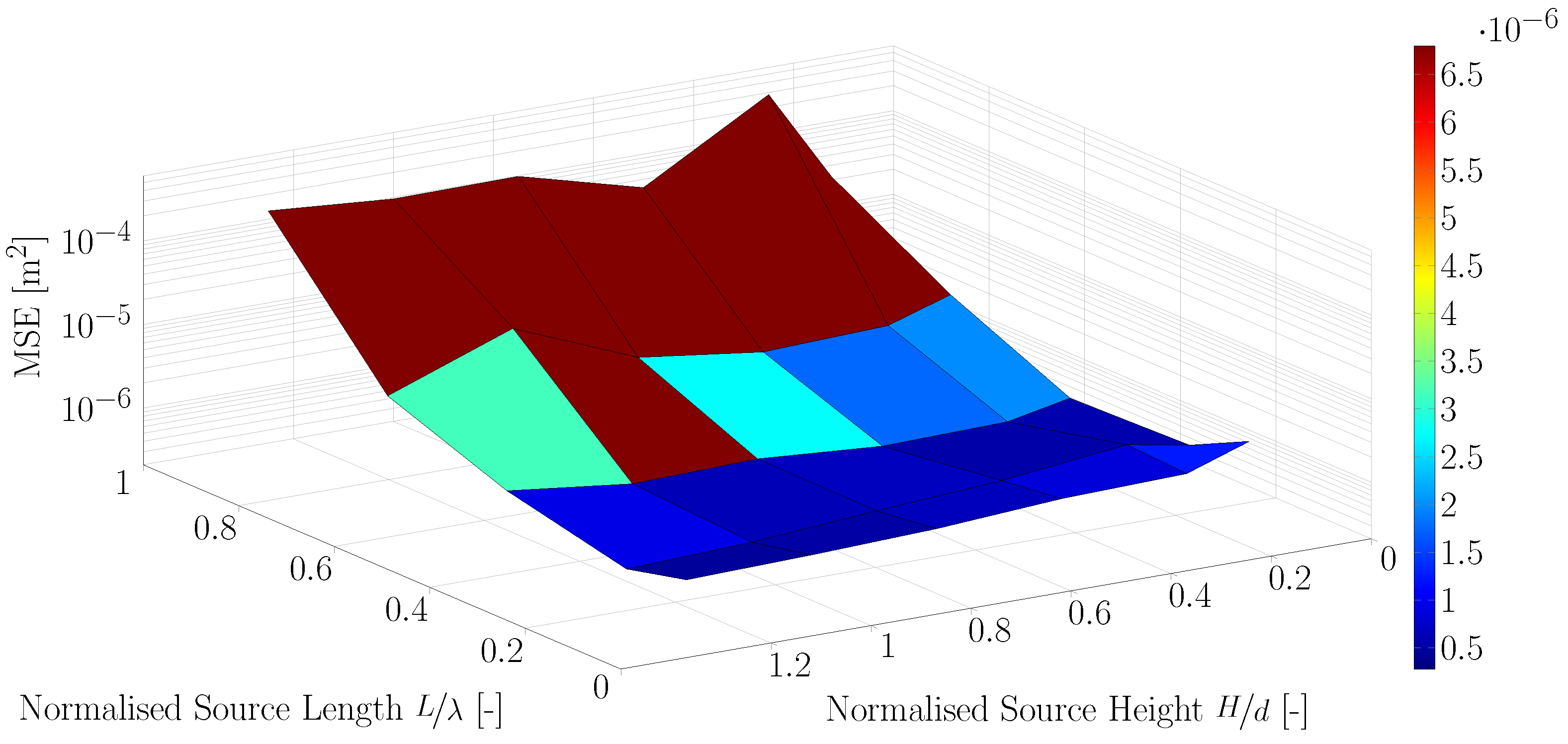
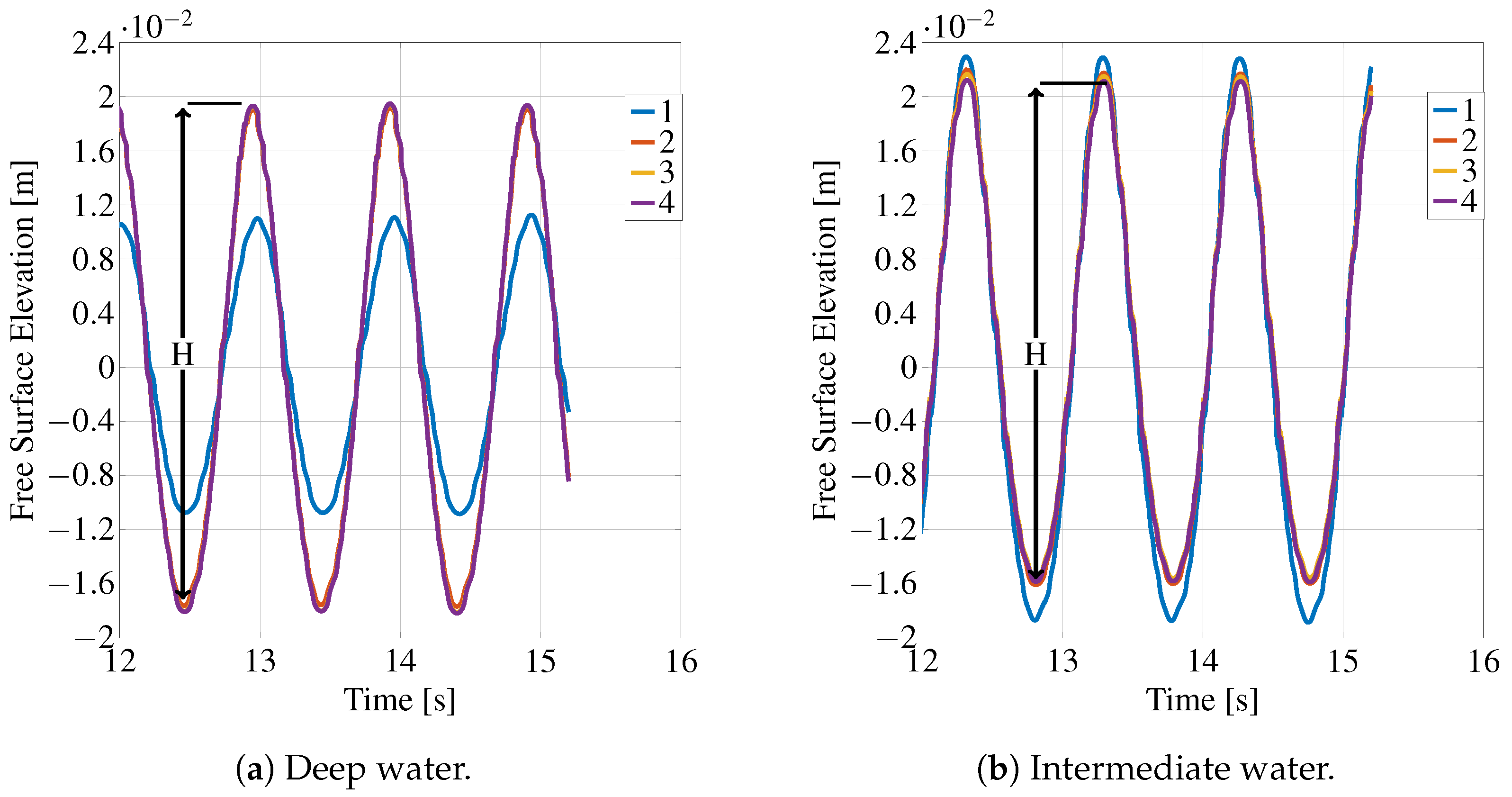
4.2. Wave Packet: Deep Water Waves
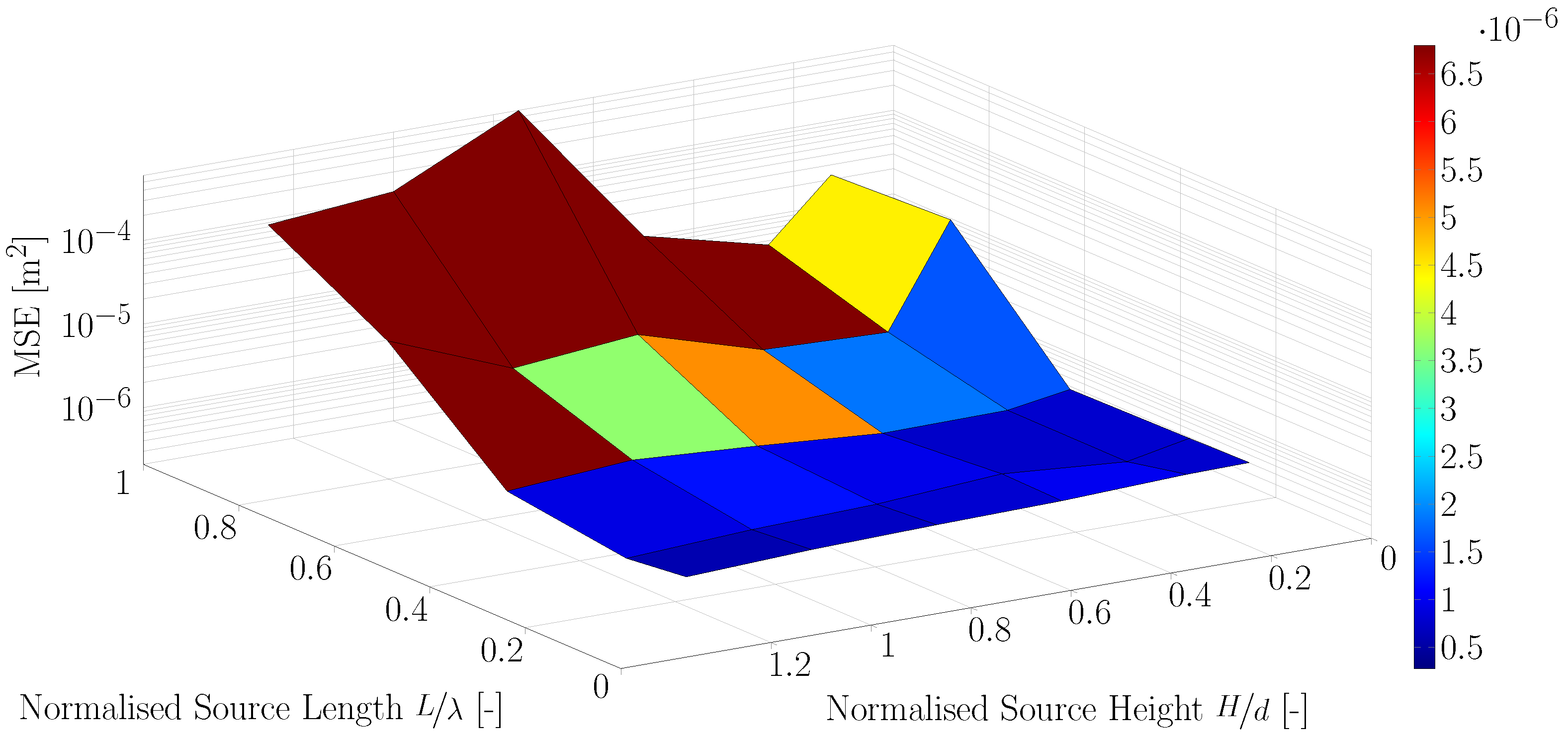
4.3. Wave Packet: Intermediate Water Waves
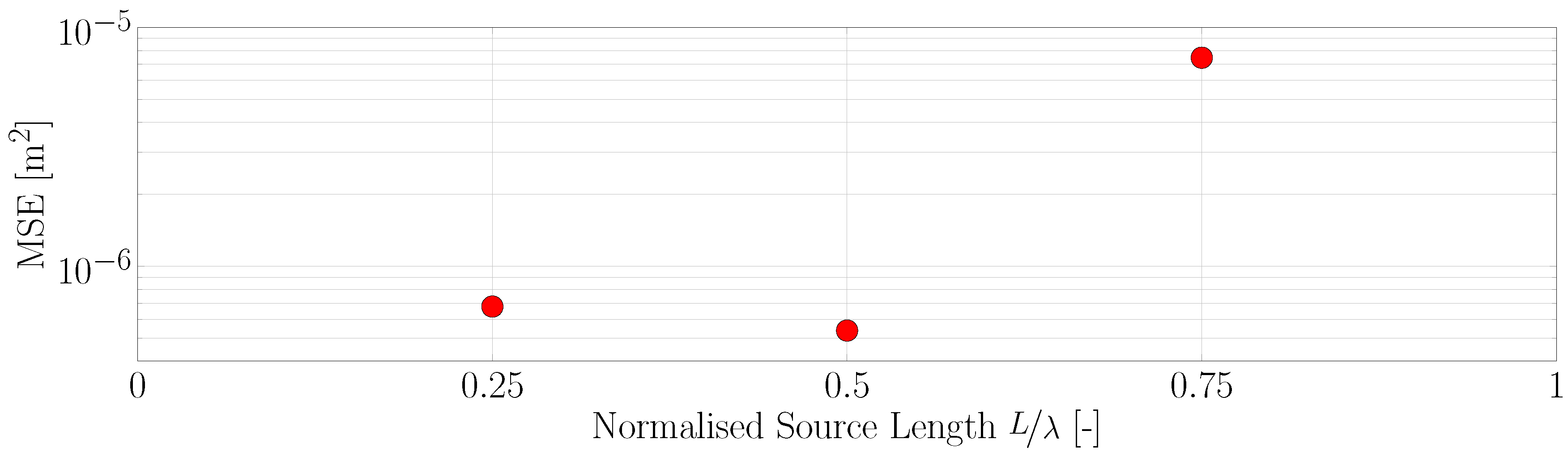
4.4. Wave Packet: Shallow Water Waves
4.5. Regular Waves
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Source Region Parameters and MSE Values

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height/Length | 1L | 0.75L | 0.5L | 0.25L | 0.125L |
|---|---|---|---|---|---|
| 1.25d | 1.87 | 7.87 | 1.84 | 2.88 | 7.09 |
| 1d | 9.05 | 1.11 | 1.16 | 3.47 | 4.48 |
| 0.75d | 1.13 | 1.41 | 1.41 | 3.46 | 3.99 |
| 0.5d | 3.60 | 8.57 | 1.21 | 4.74 | 3.10 |
| 0.25d | 1.23 | 6.86 | 4.96 | 2.80 | 4.75 |
| 0.125d | 4.53 | 4.59 | 6.66 | 2.72 | 1.32 |
| Height/Length | 1L | 0.75L | 0.5L | 0.25L | 0.125L |
|---|---|---|---|---|---|
| 1.25d | 1.80 | 2.22 | 4.50 | 4.43 | 6.59 |
| 1d | 1.24 | 1.06 | 4.92 | 4.16 | 6.22 |
| 0.75d | 2.01 | 1.46 | 5.03 | 4.36 | 6.64 |
| 0.5d | 1.34 | 1.40 | 4.66 | 6.81 | 8.24 |
| 0.25d | 1.39 | 2.94 | 5.83 | 9.33 | 1.19 |
| 0.125d | 1.67 | 6.89 | 8.06 | 1.38 | 2.82 |
| Height/Length | 1L | 0.75L | 0.5L | 0.25L | 0.125L |
|---|---|---|---|---|---|
| 1.25d | 1.26 | 3.15 | 9.38 | 4.46 | 6.69 |
| 1d | 9.63 | 1.11 | 6.26 | 5.12 | 7.29 |
| 0.75d | 9.85 | 2.75 | 6.84 | 6.67 | 8.26 |
| 0.5d | 3.97 | 1.75 | 5.35 | 8.43 | 1.04 |
| 0.25d | 2.82 | 1.99 | 5.74 | 1.25 | 1.14 |
| 0.125d | 2.21 | 3.45 | 8.16 | 9.14 | 2.05 |
| Height/Length | 1L | 0.75L | 0.5L | 0.25L | 0.125L |
|---|---|---|---|---|---|
| 1.25d | 8.46 | 1.41 | 9.18 | 5.89 | 7.15 |
| 1d | 1.16 | 3.65 | 1.19 | 7.13 | 8.33 |
| 0.75d | 5.96 | 5.08 | 9.64 | 7.92 | 9.07 |
| 0.5d | 1.03 | 1.84 | 7.52 | 1.00 | 9.65 |
| 0.25d | 4.45 | 1.64 | 7.79 | 7.71 | 1.10 |
| 0.125d | 2.27 | 2.69 | 1.03 | 1.09 | 1.13 |
| Height/Length | 0.75L | 0.5L | 0.25L |
|---|---|---|---|
| 1.25d | 7.47 | 5.38 | 6.78 |
References
- Vanneste, D.; Troch, P. 2D numerical simulation of large-scale physical model tests of wave interaction with a rubble-mound breakwater. Coast. Eng. 2015, 103, 22–41. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Dimakopoulos, A.; Cuomo, G.; Chandler, I. Optimized generation and absorption for three-dimensional numerical wave and current facilities. J. Waterw. Port Coast. Ocean Eng. 2016, 142. [Google Scholar] [CrossRef]
- Lu, X.; Chandar, D.D.J.; Chen, Y.; Lou, J. An overlapping domain decomposition based near-far field coupling method for wave structure interaction simulations. Coast. Eng. 2017, 126, 37–50. [Google Scholar] [CrossRef]
- Vukčević, V.; Jasak, H.; Malenica, Š. Decomposition model for naval hydrodynamic applications, Part I: Computational method. Ocean Eng. 2016, 121, 37–46. [Google Scholar] [CrossRef]
- Kim, S.H.; Yamashiro, M.; Yoshida, A. A simple two-way coupling method of BEM and VOF model for random wave calculations. Coast. Eng. 2010, 57, 1018–1028. [Google Scholar] [CrossRef]
- Wu, G.; Jand, H.; Kim, J.; Ma, W.; Wu, M.; O’Sullivan, J. Benchmark of CFD Modeling of TLP Free Motion in Extreme Wave Event. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering 2014, San Francisco, CA, USA, 8–13 June 2014; pp. 1–9. [Google Scholar] [CrossRef]
- Troch, P.; De Rouck, J. An active wave generating-absorbing boundary condition for VOF type numerical model. Coast. Eng. 1999, 38, 223–247. [Google Scholar] [CrossRef]
- Anbarsooz, M.; Passandideh-Fard, M.; Moghiman, M. Fully nonlinear viscous wave generation in numerical wave tanks. Ocean Eng. 2013, 59, 73–85. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier–Stokes models: Application to OpenFOAM®. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Brorsen, M.; Larsen, J. Source generation of nonlinear gravity waves with the boundary integral equation method. Coast. Eng. 1987, 11, 93–113. [Google Scholar] [CrossRef]
- Perić, R.; Abdel-Maksoud, M. Assessment of uncertainty due to wave reflections in experiments via numerical flow simulations. In Proceedings of the ISOPE 2015—The 25th International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015; pp. 530–537. [Google Scholar]
- Ren, X.; Mizutani, N.; Nakamura, T. Development of a numerical circular wave basin based on the two-phase incompressible flow model. Ocean Eng. 2015, 101, 93–100. [Google Scholar] [CrossRef]
- Saincher, S.; Banerjee, J. Design of a numerical wave tank and wave flume for low steepness waves in deep and intermediate water. In Proceedings of the 5th International Conference on Asian and Pacific Coasts, Chennai, India, 7–10 September 2015; Volume 116, pp. 221–228. [Google Scholar] [CrossRef]
- Ha, T.; Lin, P.; Cho, Y.S. Generation of 3D regular and irregular waves using Navier–Stokes equations model with an internal wave maker. Coast. Eng. 2013, 76, 55–67. [Google Scholar] [CrossRef]
- Hafsia, Z.; Hadj, M.B.; Lamloumi, H.; Maalel, K. Internal inlet for wave generation and absorption treatment. Coast. Eng. 2009, 56, 951–959. [Google Scholar] [CrossRef]
- Kim, G.; Lee, M. On the internal generation of waves: Control volume approach. Ocean Eng. 2011, 38, 1027–1029. [Google Scholar] [CrossRef]
- Choi, J.; Yoon, S.B. Numerical simulations using momentum source wave-maker applied to RANS equation model. Coast. Eng. 2009, 56, 1043–1060. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Schmitt, P.; Ringwood, J.V. On the assessment of numerical wave makers for CFD simulations. J. Mar. Sci. Eng. 2019, 7, 47. [Google Scholar] [CrossRef]
- Wei, G.; Kirby, J.; Sinha, A. Generation of waves in Boussinesq models using a source function method. Coast. Eng. 1999, 36, 271–299. [Google Scholar] [CrossRef]
- Schmitt, P. Steps Towards a Self Calibrating, Low Reflection Numerical Wave Maker Using Narx Neural Networks. In Proceedings of the VII International Conference on Computational Methods in Marine Engineering, Nantes, France, 15–17 May 2017; p. 6. [Google Scholar]
- McKee, R.; Elsäßer, B.; Schmitt, P. Obtaining reflection coefficients from a single point velocity measurement. J. Mar. Sci. Eng. 2018, 6, 72. [Google Scholar] [CrossRef]
- Vyzikas, T.; Stagonas, D.; Buldakov, E.; Greaves, D. The evolution of free and bound waves during dispersive focusing in a numerical and physical flume. Coast. Eng. 2018, 132, 95–109. [Google Scholar] [CrossRef]
- Perić, R.; Abdel-Maksoud, M. Generation of free-surface waves by localized source terms in the continuity equation. Ocean Eng. 2015, 109, 567–579. [Google Scholar] [CrossRef]
- Schmitt, P.; Elsaesser, B. A Review of Wave Makers for 3D numerical Simulations. In Proceedings of the 6th International Conference on Computational Methods in Marine Engineering, Rome, Italy, 15–17 June 2015; pp. 437–446. [Google Scholar]
- Perić, R.; Abdel-Maksoud, M. Analytical prediction of reflection coefficients for wave absorbing layers in flow simulations of regular free-surface waves. Ocean Eng. 2018, 147, 132–147. [Google Scholar] [CrossRef]
- Masterton, S.; Swan, C. On the accurate and efficient calibration of a 3D wave basin. Ocean Eng. 2008, 35, 763–773. [Google Scholar] [CrossRef]
- Schmitt, P.; Elsaesser, B. On the use of OpenFOAM to model oscillating wave surge converters. Ocean Eng. 2015, 108, 98–104. [Google Scholar] [CrossRef]
- Schmitt, P.; Asmuth, H.; Elsäßer, B. Optimising power take-off of an oscillating wave surge converter using high fidelity numerical simulations. Int. J. Mar. Energy 2016, 16, 196–208. [Google Scholar] [CrossRef]
- Vorhoelter, H.; Will, J.; Schmitt, P.; Puder, D. Wave Loads on Monopile Structures. In STG Jahrbuch; Hansa GmbH & Co. KG: Bremen, Germany, 2018; Volume 111. [Google Scholar]
- Ning, D.; Zang, J.; Liu, S.; Taylor, R.E.; Teng, B.; Taylor, P. Free-surface evolution and wave kinematics for nonlinear uni-directional focused wave groups. Ocean Eng. 2009, 36, 1226–1243. [Google Scholar] [CrossRef]
- O’Boyle, L.; Elsaeßer, B.; Whittaker, T. Methods to enhance the performance of a 3D coastal wave basin. Ocean Eng. 2017, 135, 158–169. [Google Scholar] [CrossRef]
- Wu, Y.L.; Stewart, G.; Chen, Y.; Gullman-Strand, J.; Lv, X.; Kumar, P. A CFD Application of NewWave Theory to Wave-in-Deck Simulation. Int. J. Comput. Methods 2016, 13, 1640014. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College London, London, UK, 2003. [Google Scholar]
- Eaton, J.W.; Bateman, D.; Hauberg, S.; Wehbring, R. GNU Octave Version 4.2.0 Manual: A High-Level Interactive Language for Numerical Computations. 2016. Available online: https://www.gnu.org/software/octave/doc/v4.2.1/ (accessed on 1 November 2018).
- CCP-WSI. CCP-WSI Repository. Available online: tps://www.ccp-wsi.ac.uk/code_repository (accessed on 19 November 2017).
- Windt, C.; Davidson, J.; Ringwood, J. High-fidelity numerical modelling of ocean wave energy systems: A review of CFD-based numerical wave tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef]
- Mansard, E.; Funke, E. The measurement of incident and reflected spectra using a least square method. In Proceedings of the Conference on Coastal Engineering (ICCE’80), Sydney, Australia, 23–28 March 1980; pp. 154–172. [Google Scholar]















| d (m) | (m) | (s) | (m) | (–) | (–) | |
|---|---|---|---|---|---|---|
| Deep water | 0.74 | 0.02 | 0.975 | 1.48 | 0.5 | 3.13 |
| Intermediate water | 0.25 | 0.02 | 1.1 | 1.48 | 0.17 | 1.06 |
| Shallow water | 0.74 | 0.015 | 6.0 | 15.9 | 0.05 | 0.29 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmitt, P.; Windt, C.; Davidson, J.; Ringwood, J.V.; Whittaker, T. The Efficient Application of an Impulse Source Wavemaker to CFD Simulations. J. Mar. Sci. Eng. 2019, 7, 71. https://doi.org/10.3390/jmse7030071
Schmitt P, Windt C, Davidson J, Ringwood JV, Whittaker T. The Efficient Application of an Impulse Source Wavemaker to CFD Simulations. Journal of Marine Science and Engineering. 2019; 7(3):71. https://doi.org/10.3390/jmse7030071
Chicago/Turabian StyleSchmitt, Pál, Christian Windt, Josh Davidson, John V. Ringwood, and Trevor Whittaker. 2019. "The Efficient Application of an Impulse Source Wavemaker to CFD Simulations" Journal of Marine Science and Engineering 7, no. 3: 71. https://doi.org/10.3390/jmse7030071
APA StyleSchmitt, P., Windt, C., Davidson, J., Ringwood, J. V., & Whittaker, T. (2019). The Efficient Application of an Impulse Source Wavemaker to CFD Simulations. Journal of Marine Science and Engineering, 7(3), 71. https://doi.org/10.3390/jmse7030071