A Novel Segmented Structure and Control Method for a Permanent-Magnet Linear Generator to Broaden the Range of Efficient Energy Capture


Abstract
:1. Introduction
1.1. Background
- The structure of point absorption WEC with direct driven PTO is simple in structure and the system can be more reliable;
- The point absorption device is small in size and will not affect the navigation;
- The point absorption device does not completely absorb the wave energy which makes the impact on marine ecology smaller.
1.2. Potential
1.3. Solution
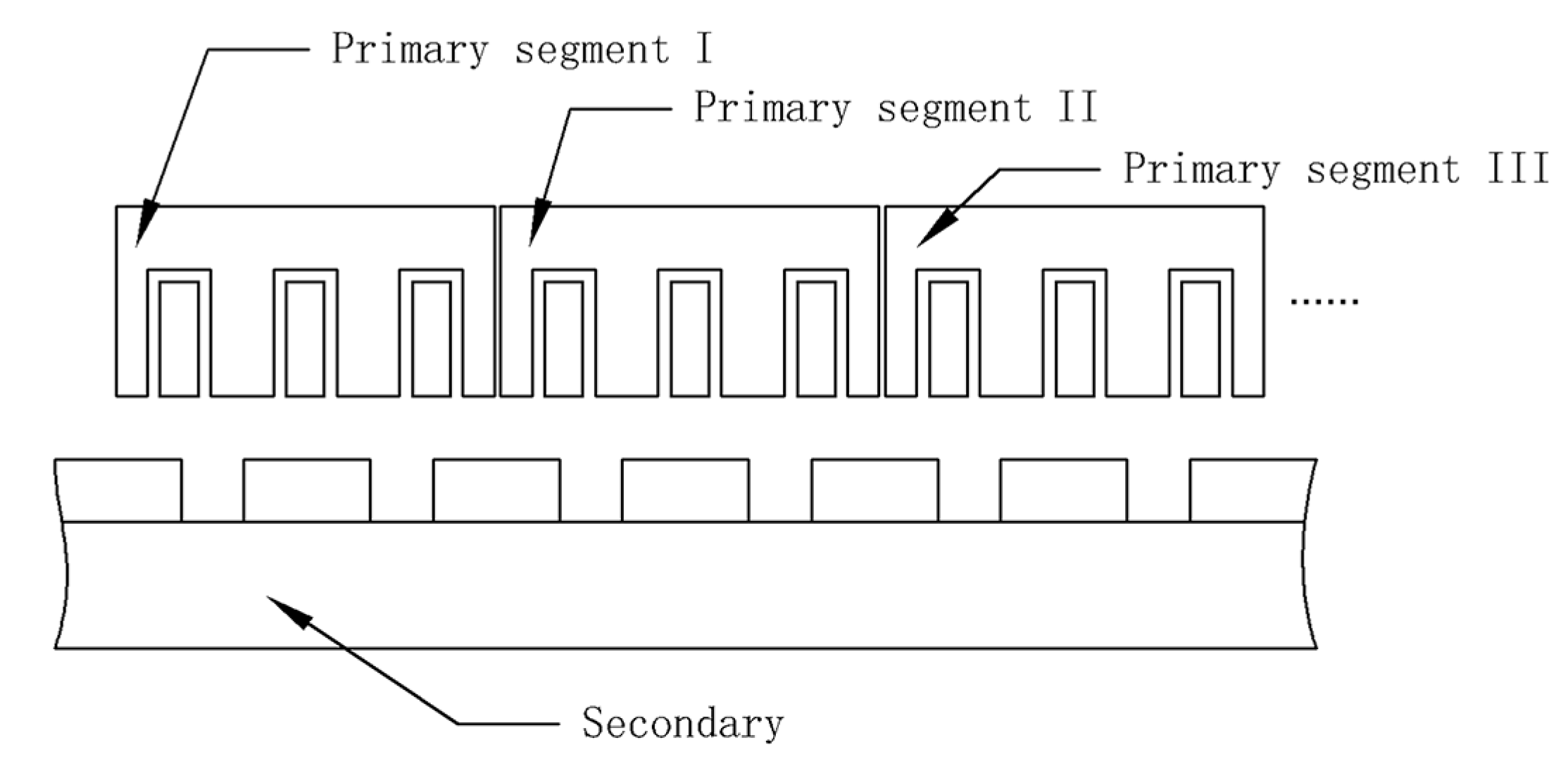
2. Structure Analysis
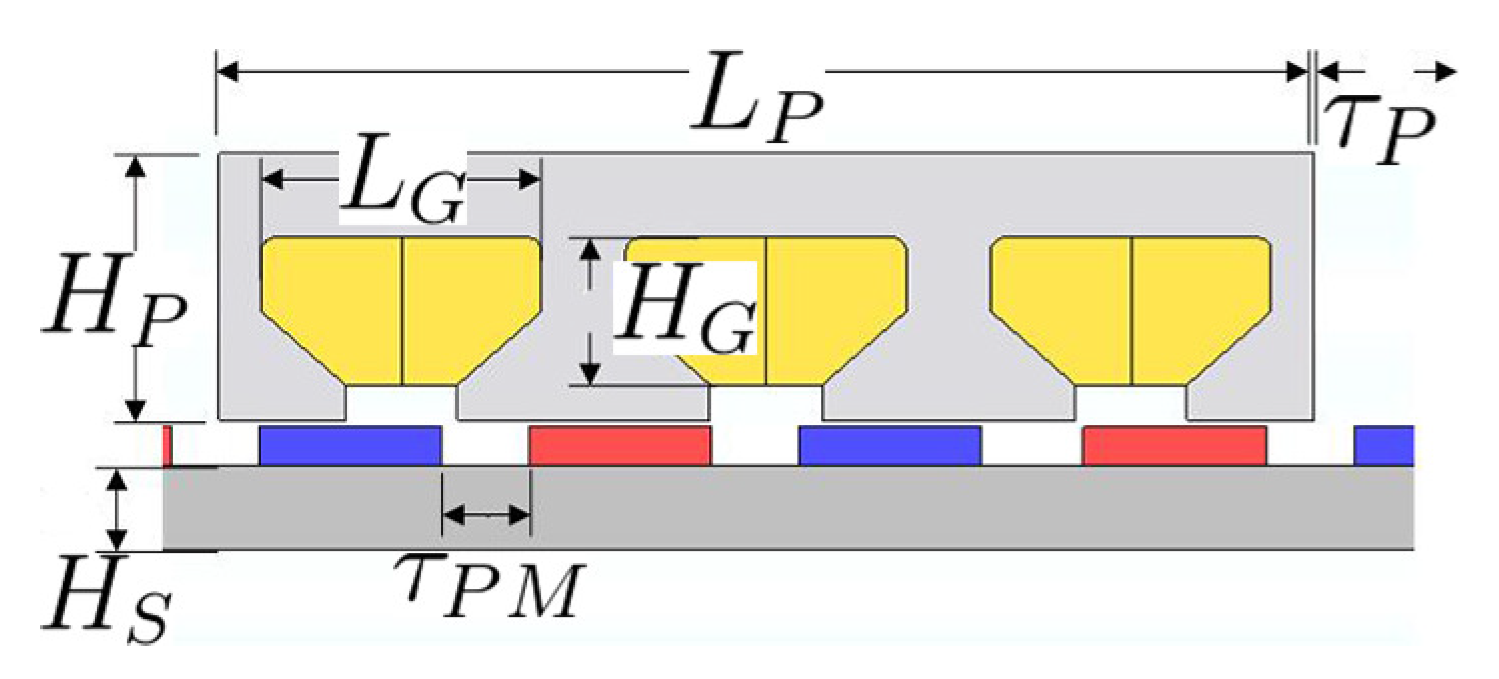
2.1. Segmented Structure
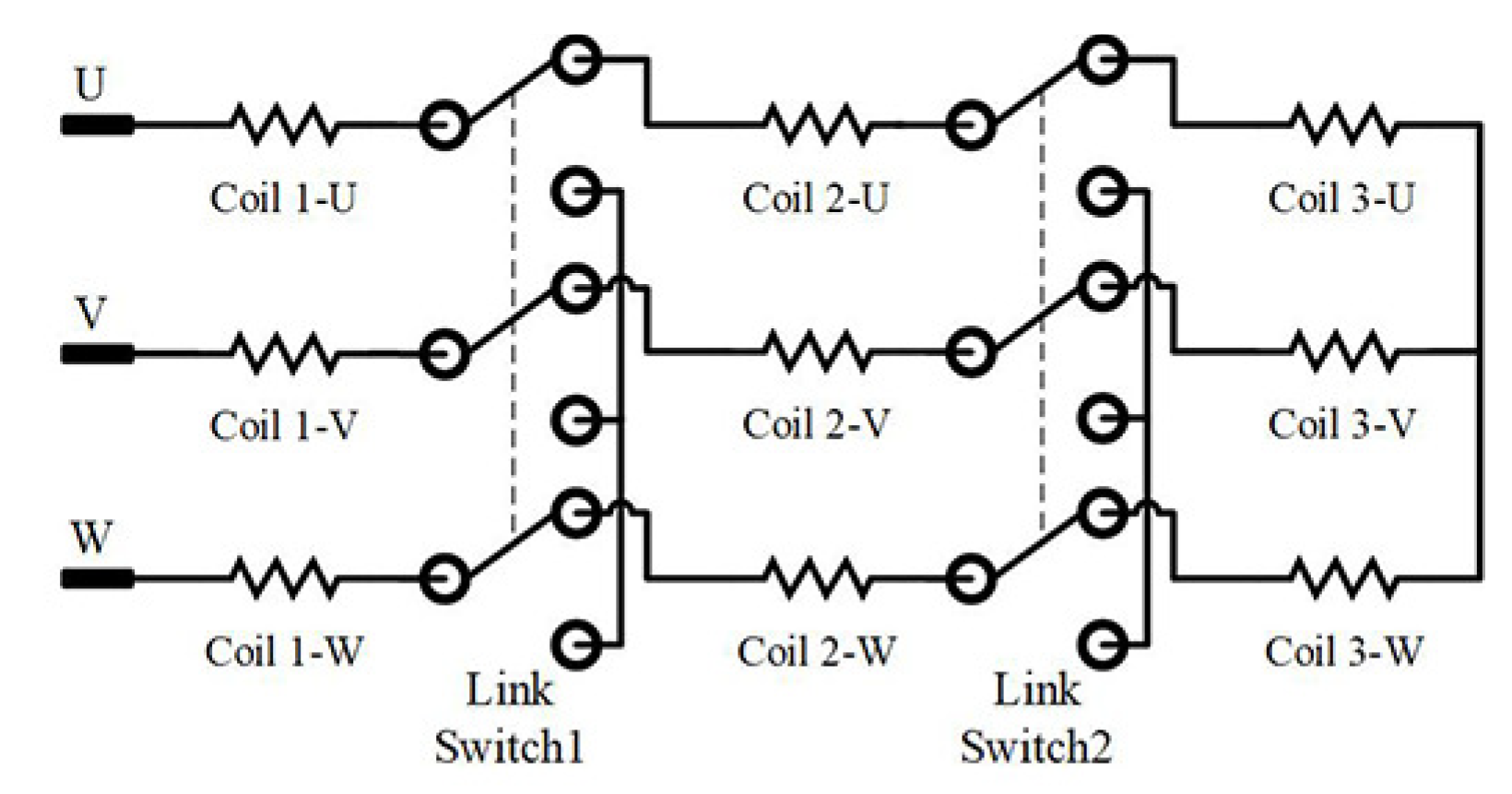
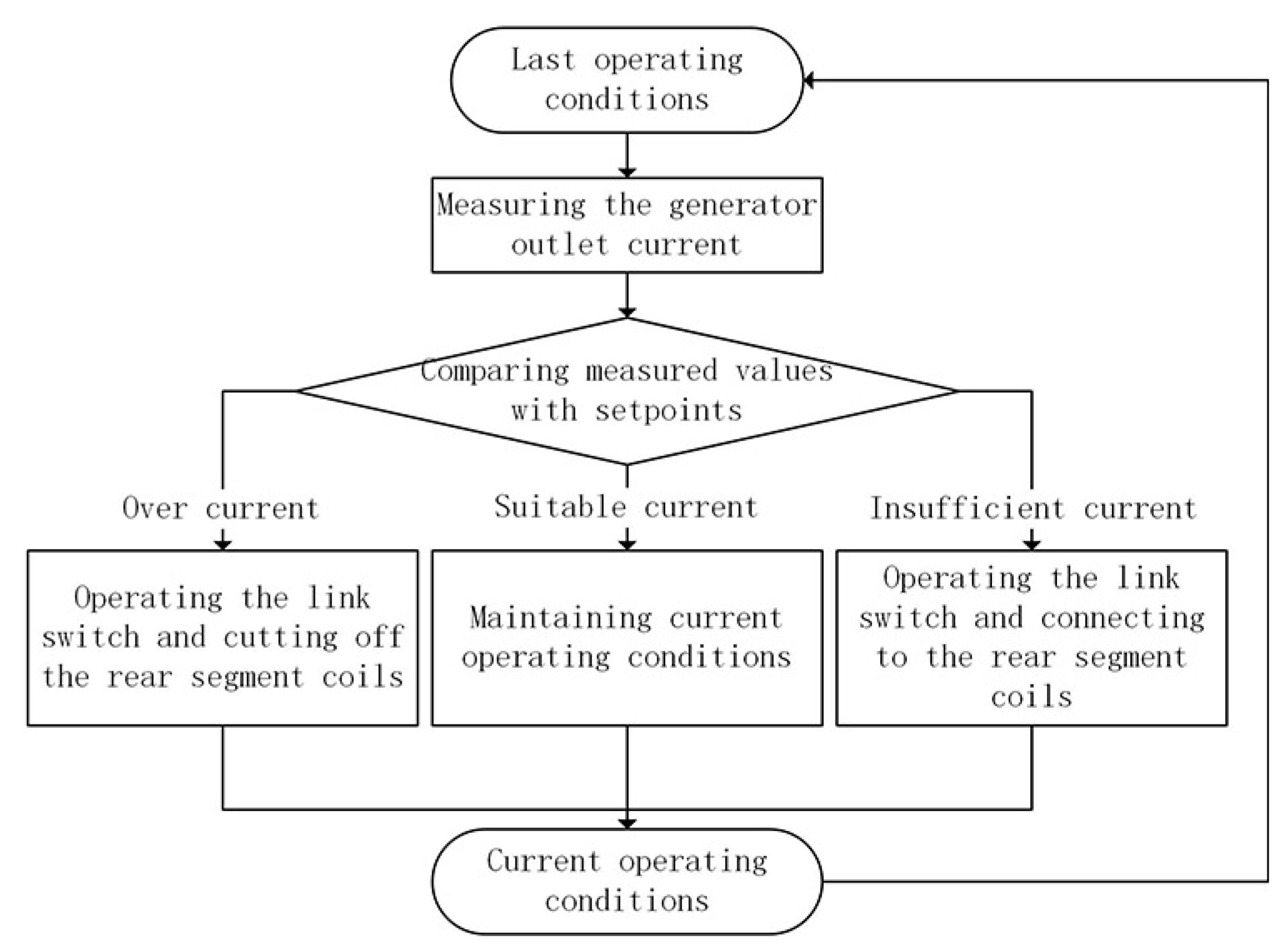
2.2. Coil Connection
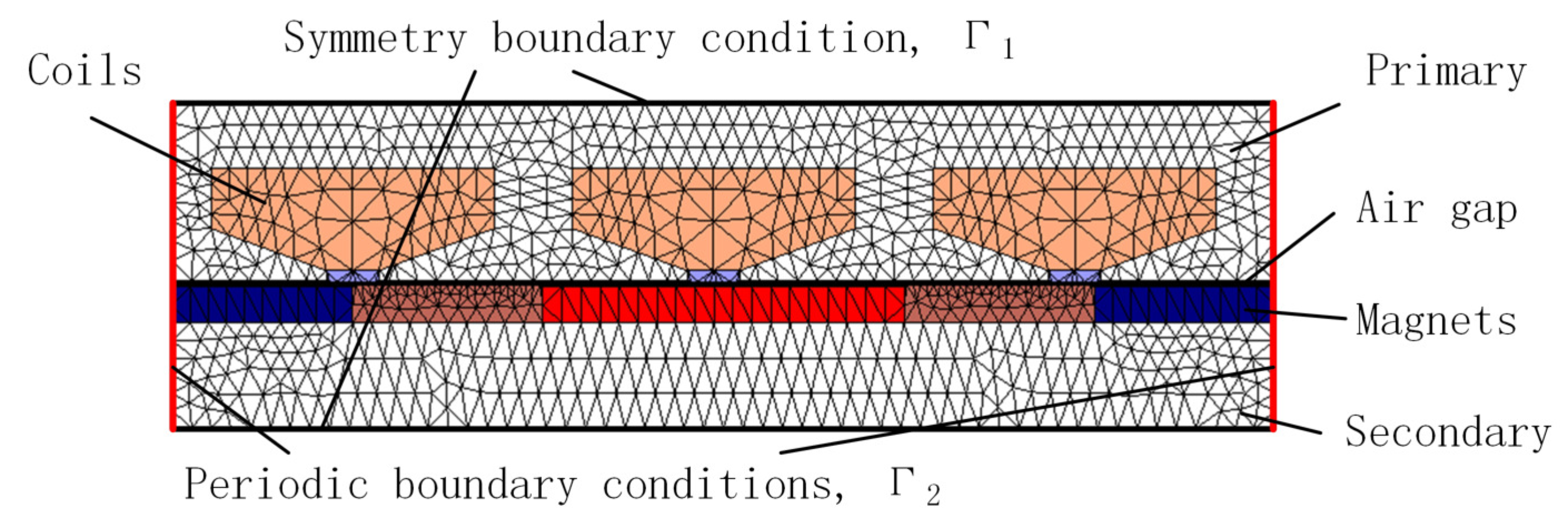
3. Mathematical Model
3.1. Wave Energy Resource
3.2. No-Load Status
3.3. Load Status
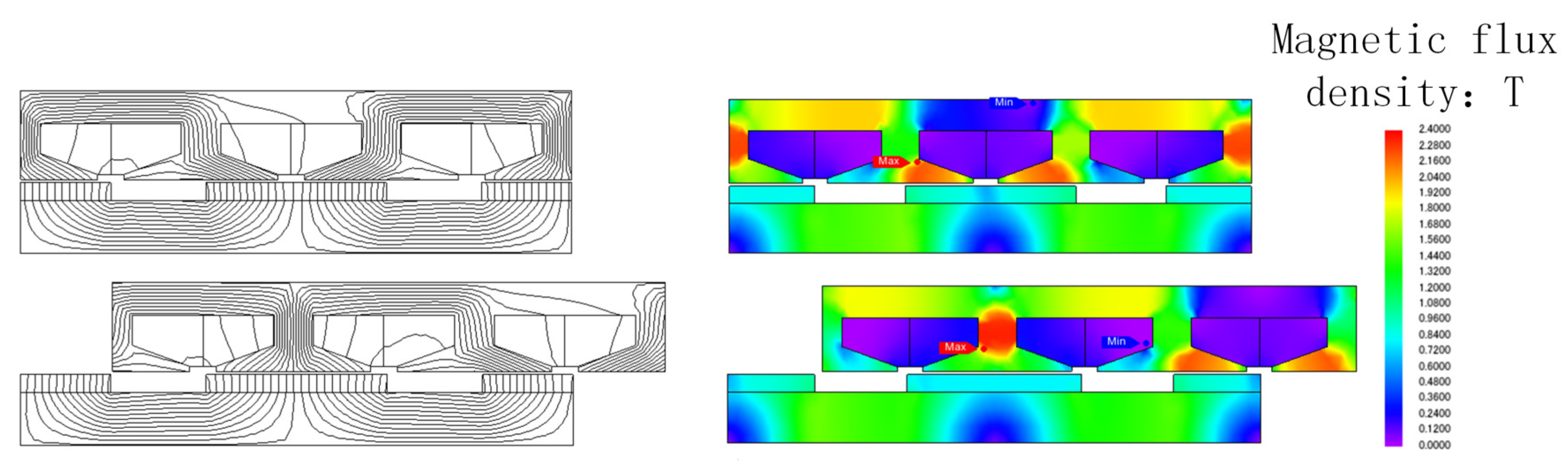
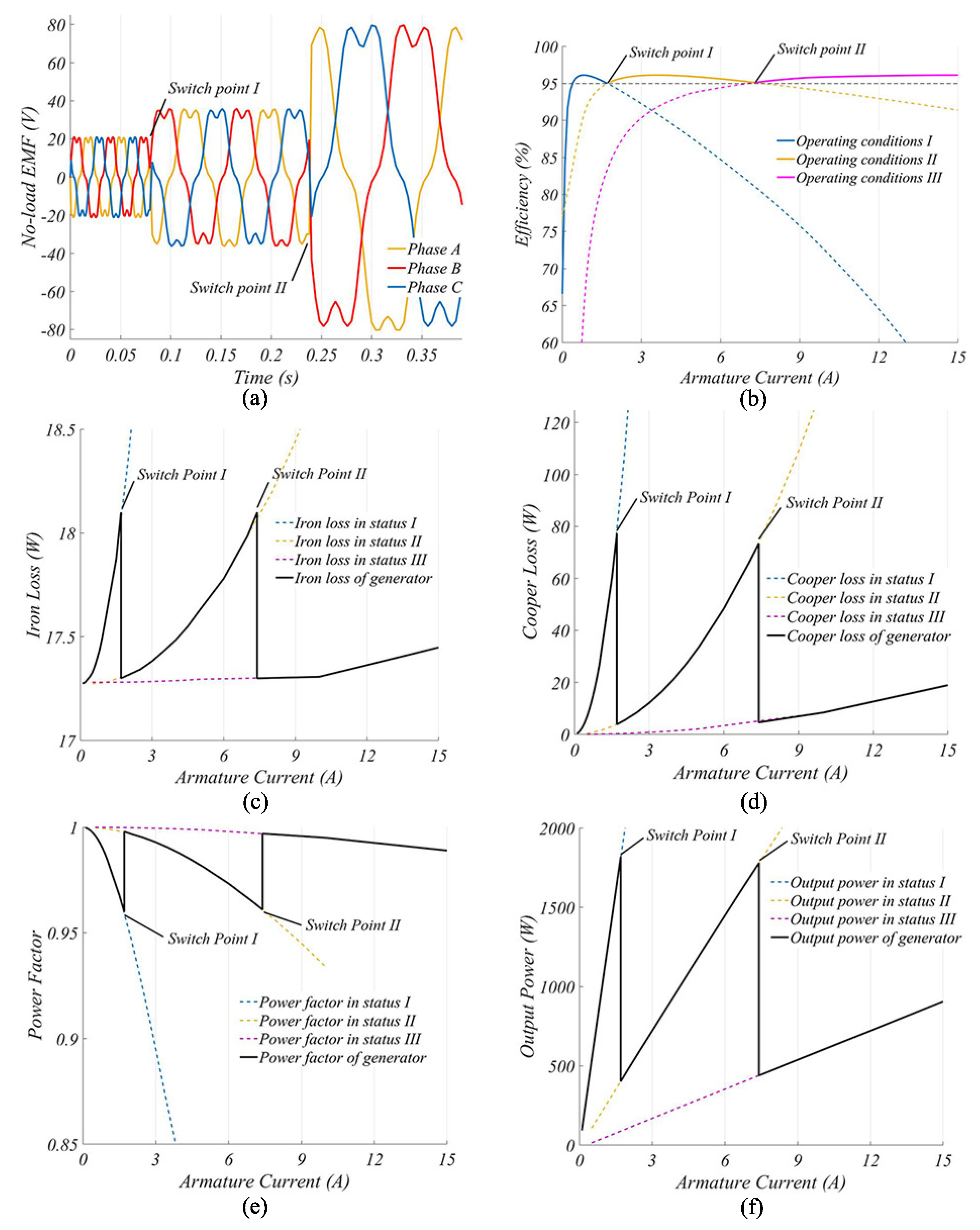
4. Simulation and Result
5. Conclusions and Discussion
- The switching control method used in this paper is an open-loop control method, which can still be improved;
- The end efficient of the linear generator can be considered to improve the accuracy of the results.
Author Contributions
Funding
Conflicts of Interest
References
- Boyle, G. Renewable Energy; Boyle, G., Ed.; Oxford University Press: Oxford, UK, May 2004; p. 456, ISBN-10 0199261784, ISBN-13 9780199261789. [Google Scholar]
- Cruz, J. Ocean Wave Energy: Current Status and Future Prespectives; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Antonio, F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Kamranzad, B.; Etemad-Shahidi, A.; Chegini, V. Assessment of wave energy variation in the Persian Gulf. Ocean Eng. 2013, 70, 72–80. [Google Scholar] [CrossRef] [Green Version]
- López, I.; Andreu, J.; Ceballos, S.; de Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Falcão, A.F.; Henriques, J.C.; Gato, L.M. Self-rectifying air turbines for wave energy conversion: A comparative analysis. Renew. Sustain. Energy Rev. 2018, 91, 1231–1241. [Google Scholar] [CrossRef]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. SSG wave energy converter: Design, reliability and hydraulic performance of an innovative overtopping device. Renew. Energy 2009, 34, 1371–1380. [Google Scholar] [CrossRef]
- Sheng, S.; Wang, K.; Lin, H.; Zhang, Y.; You, Y.; Wang, Z.; Chen, A.; Jiang, J.; Wang, W.; Ye, Y. Model research and open sea tests of 100 kW wave energy convertor Sharp Eagle Wanshan. Renew. Energy 2017, 113, 587–595. [Google Scholar] [CrossRef]
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Zou, S. Control of small two-body heaving wave energy converters for ocean measurement applications. Renew. Energy 2019, 132, 587–595. [Google Scholar] [CrossRef]
- Falnes, J. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Waters, R.; Rahm, M.; Eriksson, M.; Svensson, O.; Stromstedt, E.; Bostrom, C.; Sundberg, J.; Leijon, M. Ocean wave energy absorption in response to wave period and amplitude-offshore experiments on a wave energy converter. IET Renew. Power Gener. 2011, 5, 465–469. [Google Scholar] [CrossRef]
- Ekergård, B. Full Scale Applications of Permanent Magnet Electromagnetic Energy Converters: From Nd2Fe14B to Ferrite. Ph.D. Thesis, Acta Universitatis Upsaliensis, Uppsala, Sweden, 2013. [Google Scholar]
- Lejerskog, E. Linear Wave Energy Converter: Study of Electromagnetic Design. Ph.D. Thesis, Uppsala Universitet, Uppsala, Sweden, 2014. [Google Scholar]
- Svensson, O. Experimental Results from the Lysekil Wave Power Research Site. Ph.D. Thesis, Acta Universitatis Upsaliensis, Uppsala, Sweden, 2012. [Google Scholar]
- Wu, B.J.; Diao, X.H.; You, Y. 10 kW floating point absorber direct drive wave energy device. Ocean Technol. 2012, 31, 68–73. [Google Scholar]
- Wan, Y.; Zhang, J.; Meng, J.; Wang, J. A wave energy resource assessment in the China’s seas based on multi-satellite merged radar altimeter data. Acta Oceanol. Sin. 2015, 34, 115–124. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spring | Summer | Fall | Winter | |
|---|---|---|---|---|
| (March, April, May) | (June, July, August) | (September, October, November) | (December, January, February) | |
| Average | 0.9 m | 1 m | 1.4 m | 2.5 m |
| Maximum | 1.5 m | 1.5 m | 3 m | 6 m |
| Annual average | 1.5 m | |||
| Description | Value | Exp | ||
|---|---|---|---|---|
| Secondary | Secondary core height | 12 [mm] | ||
| Permanent-magnet spacing | [mm] | |||
| Permanent-magnet size | [mm] | |||
| Primary | Primary segment length | 168 [mm] | ||
| Primary height | 50 [mm] | |||
| Primary segment spacing | 39 [mm] | |||
| Groove length (Uneven) | 21 [mm] | |||
| Groove height (Uneven) | 40 [mm] | |||
| Air gap length | 1 [mm] | |||
| Stack height | 110 [mm] | |||
| Primary Segment | I | Turns | 40 | |
| Wire diameter | 3 [mm] | |||
| Resistance of coil | ||||
| Fill factor | ||||
| II | Turns | 120 | ||
| Wire diameter | [mm] | |||
| Resistance of coil | ||||
| Fill factor | ||||
| III | Turns | 552 | ||
| Wire diameter | [mm] | |||
| Resistance of coil | ||||
| Fill factor | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, S.; Wang, H. A Novel Segmented Structure and Control Method for a Permanent-Magnet Linear Generator to Broaden the Range of Efficient Energy Capture. J. Mar. Sci. Eng. 2019, 7, 101. https://doi.org/10.3390/jmse7040101
Qiu S, Wang H. A Novel Segmented Structure and Control Method for a Permanent-Magnet Linear Generator to Broaden the Range of Efficient Energy Capture. Journal of Marine Science and Engineering. 2019; 7(4):101. https://doi.org/10.3390/jmse7040101
Chicago/Turabian StyleQiu, Shuheng, and Haifeng Wang. 2019. "A Novel Segmented Structure and Control Method for a Permanent-Magnet Linear Generator to Broaden the Range of Efficient Energy Capture" Journal of Marine Science and Engineering 7, no. 4: 101. https://doi.org/10.3390/jmse7040101
APA StyleQiu, S., & Wang, H. (2019). A Novel Segmented Structure and Control Method for a Permanent-Magnet Linear Generator to Broaden the Range of Efficient Energy Capture. Journal of Marine Science and Engineering, 7(4), 101. https://doi.org/10.3390/jmse7040101