A Potential Flow Theory and Boundary Layer Theory Based Hybrid Method for Waterjet Propulsion

Abstract
:1. Introduction
2. Theory
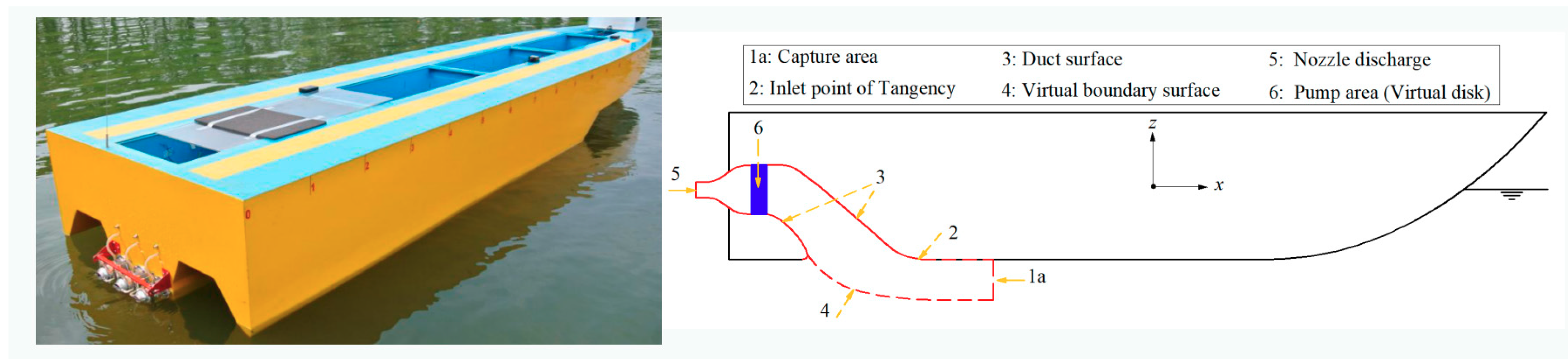
2.1. The Force-Balanced Waterjet–Hull System
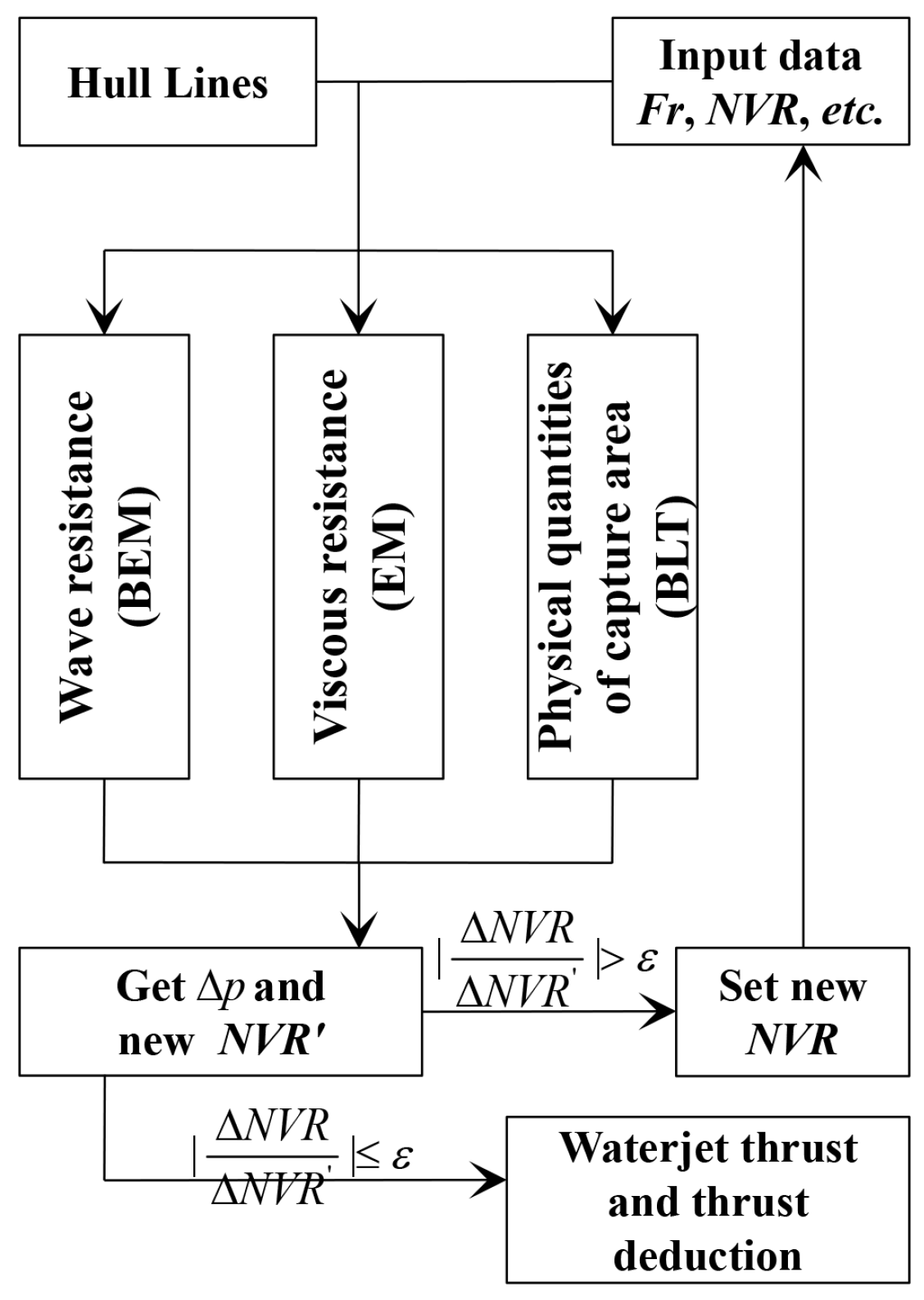
2.2. Iterative Solution Model
3. Numerical Method
3.1. Wave-Making Resistance
3.2. Viscous Resistance
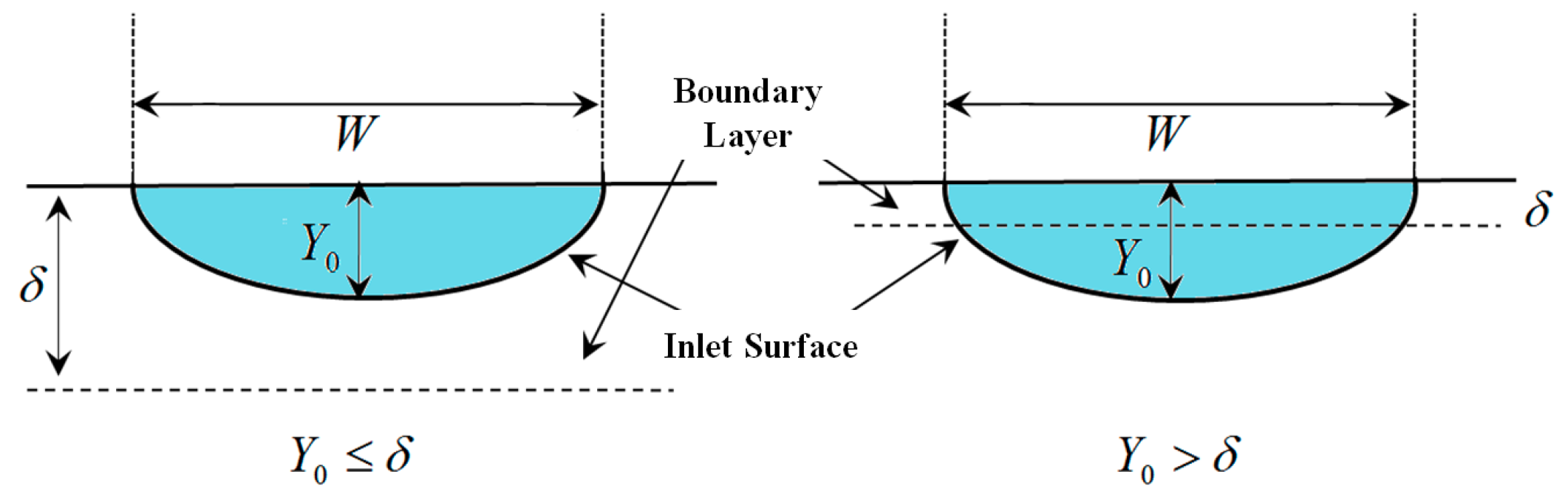
3.3. Physical Quantities of the Capture Area
4. Validation of the Numerical Method
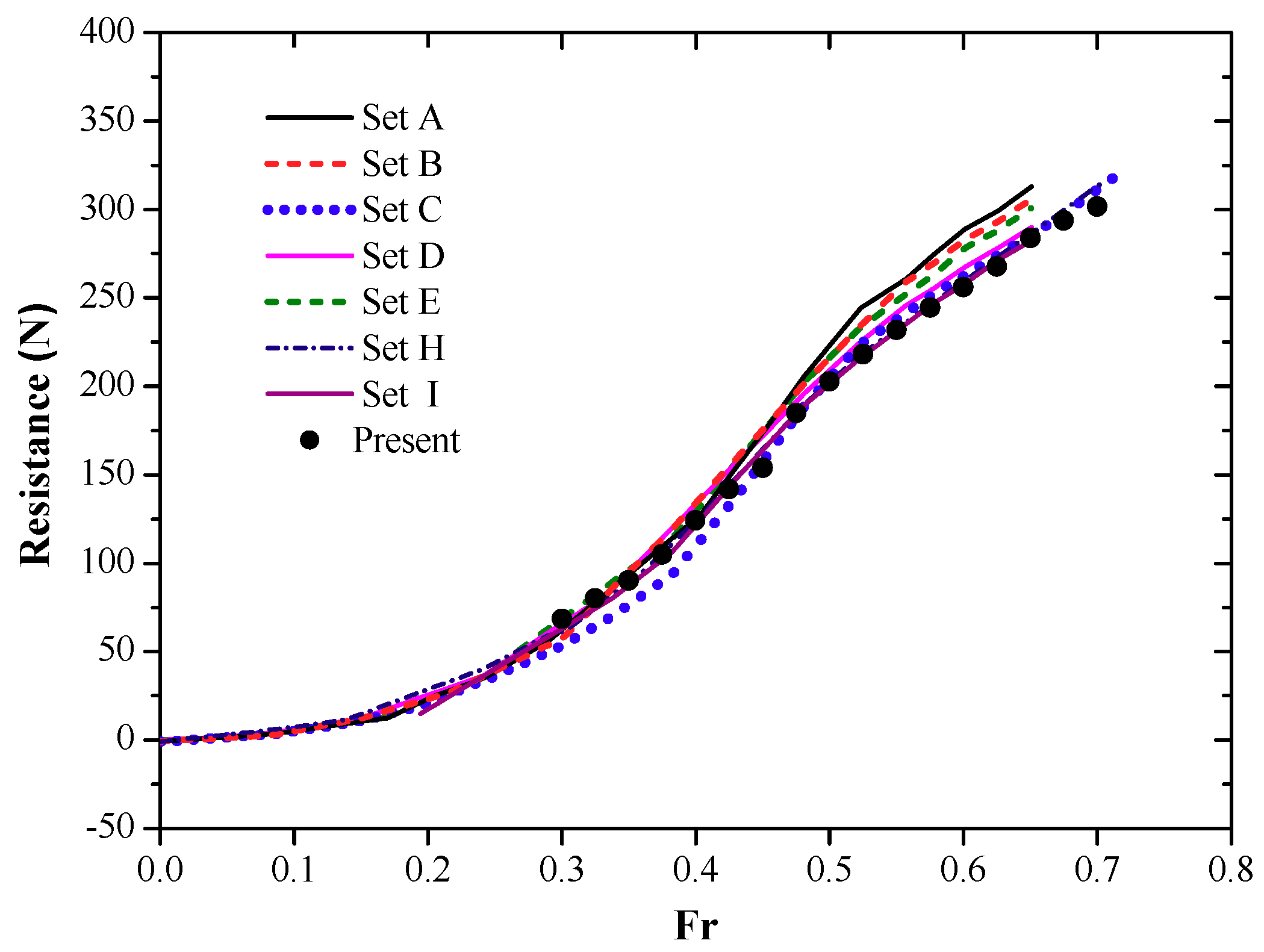
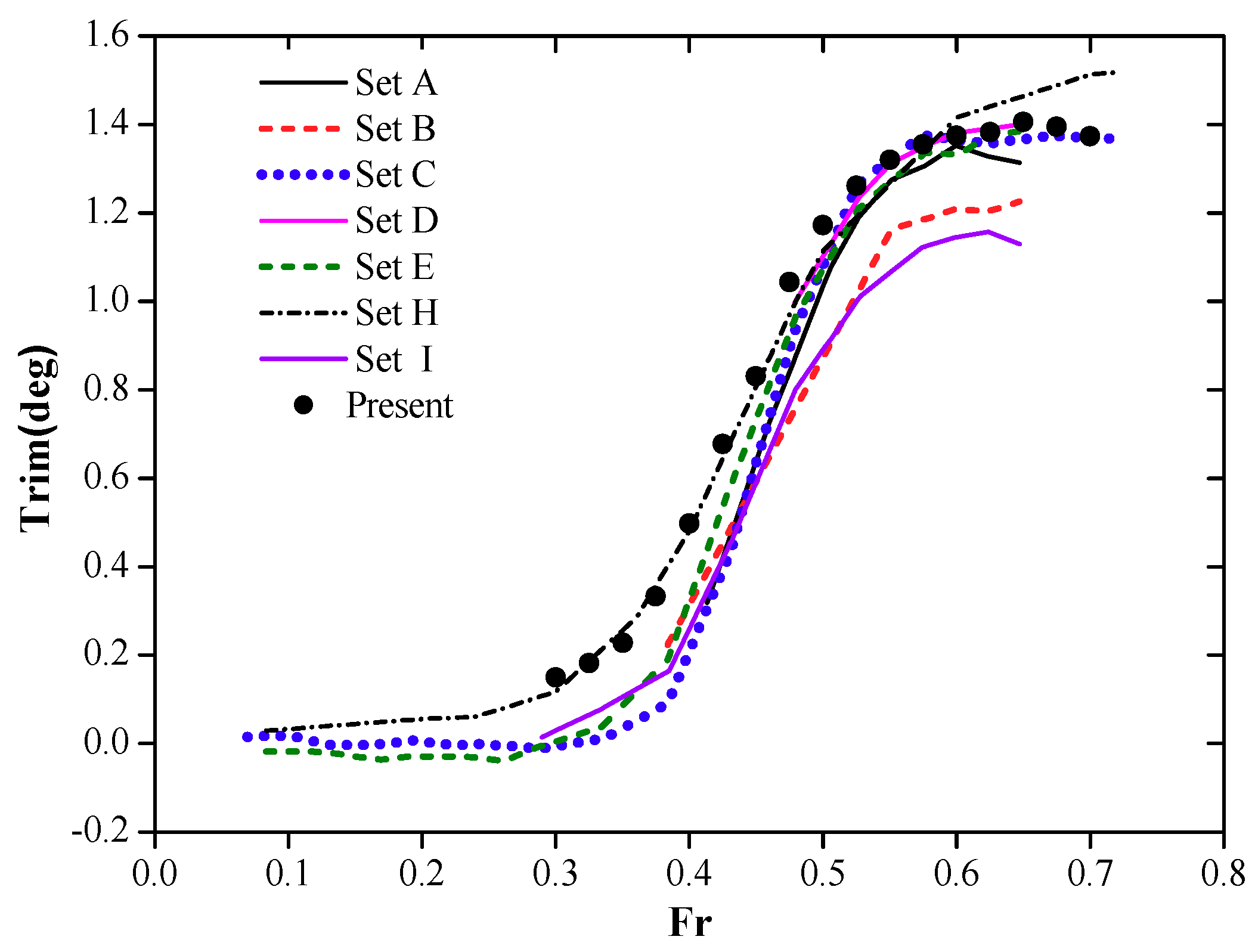
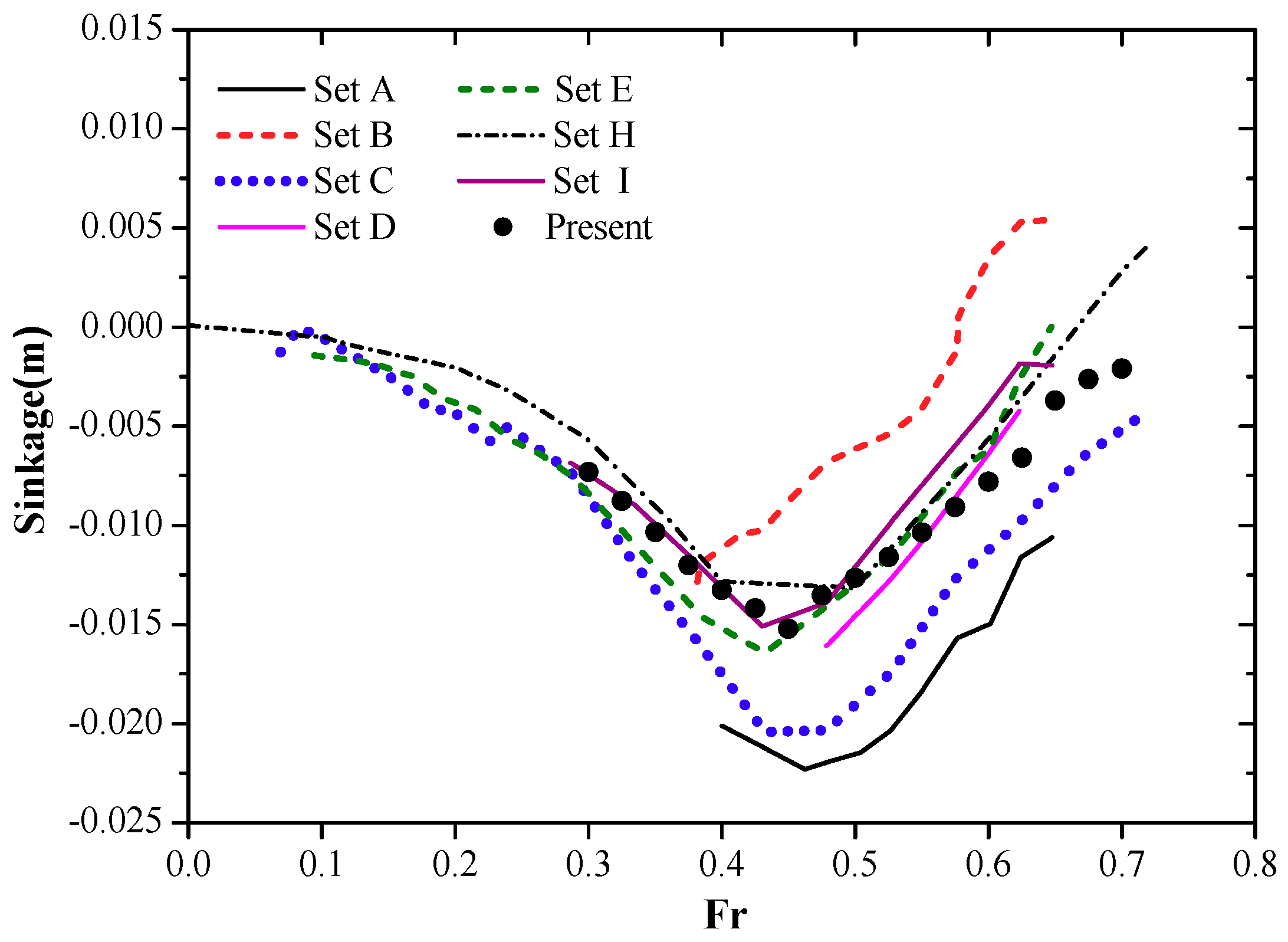
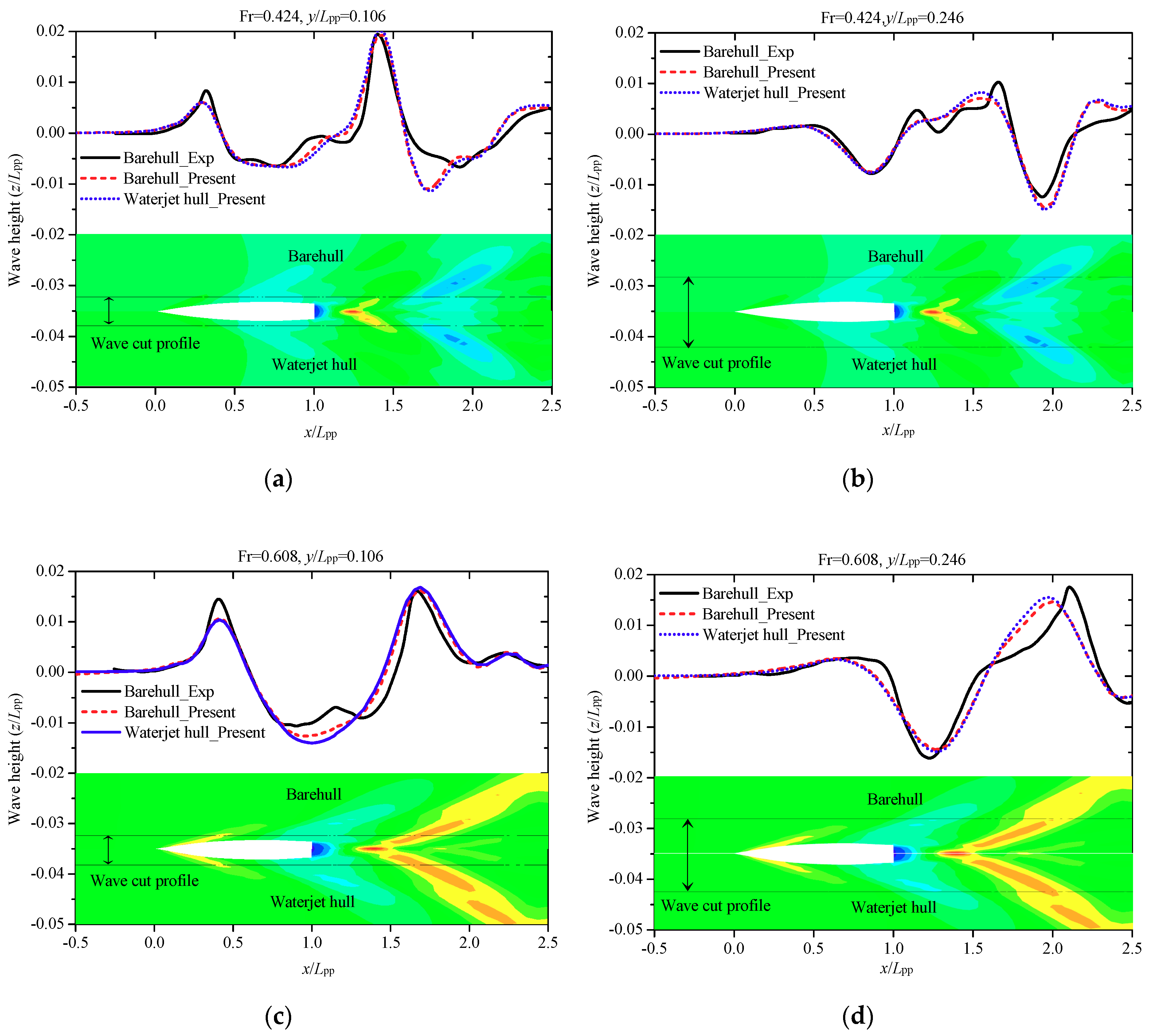
4.1. Athena Model and Barehull Validation
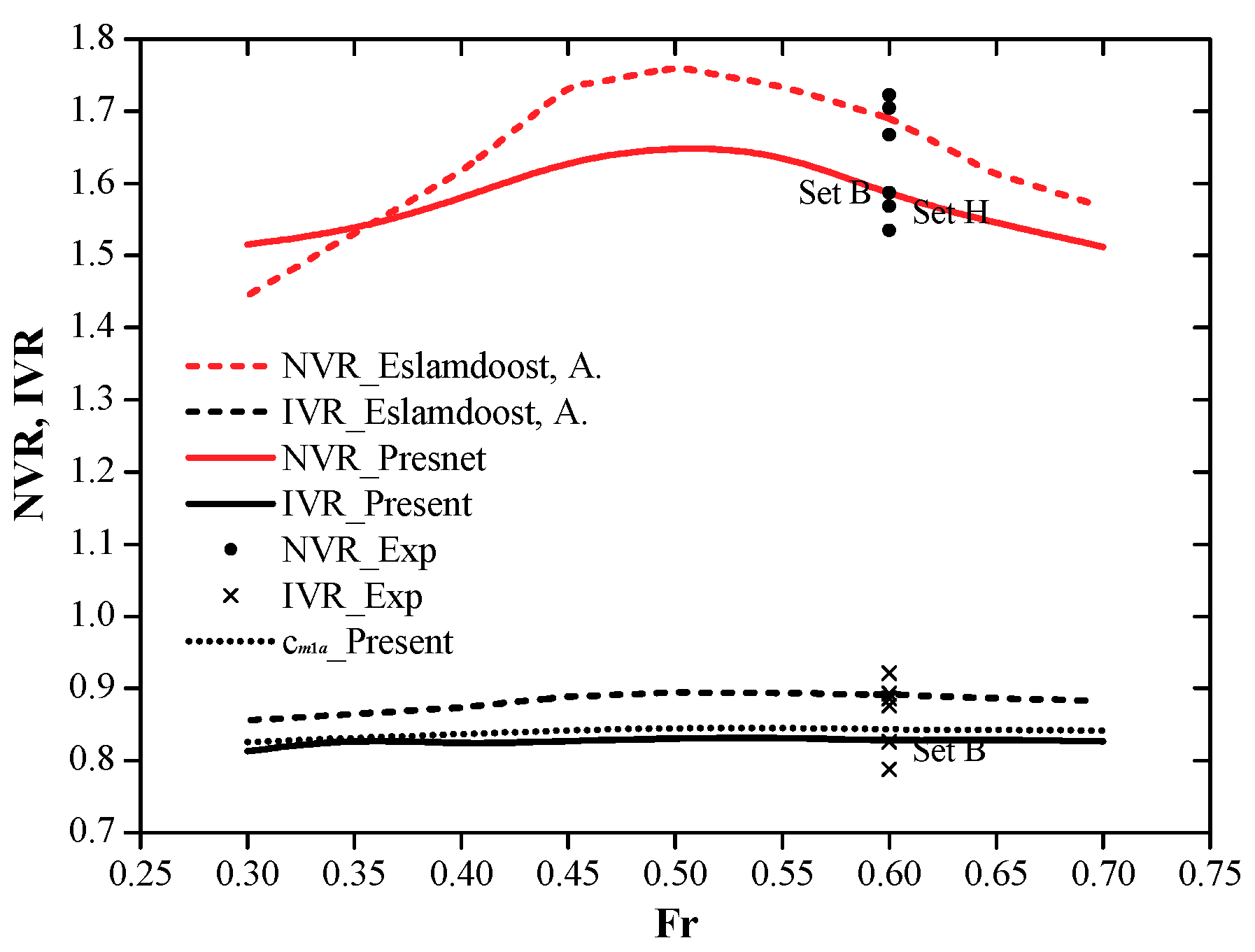
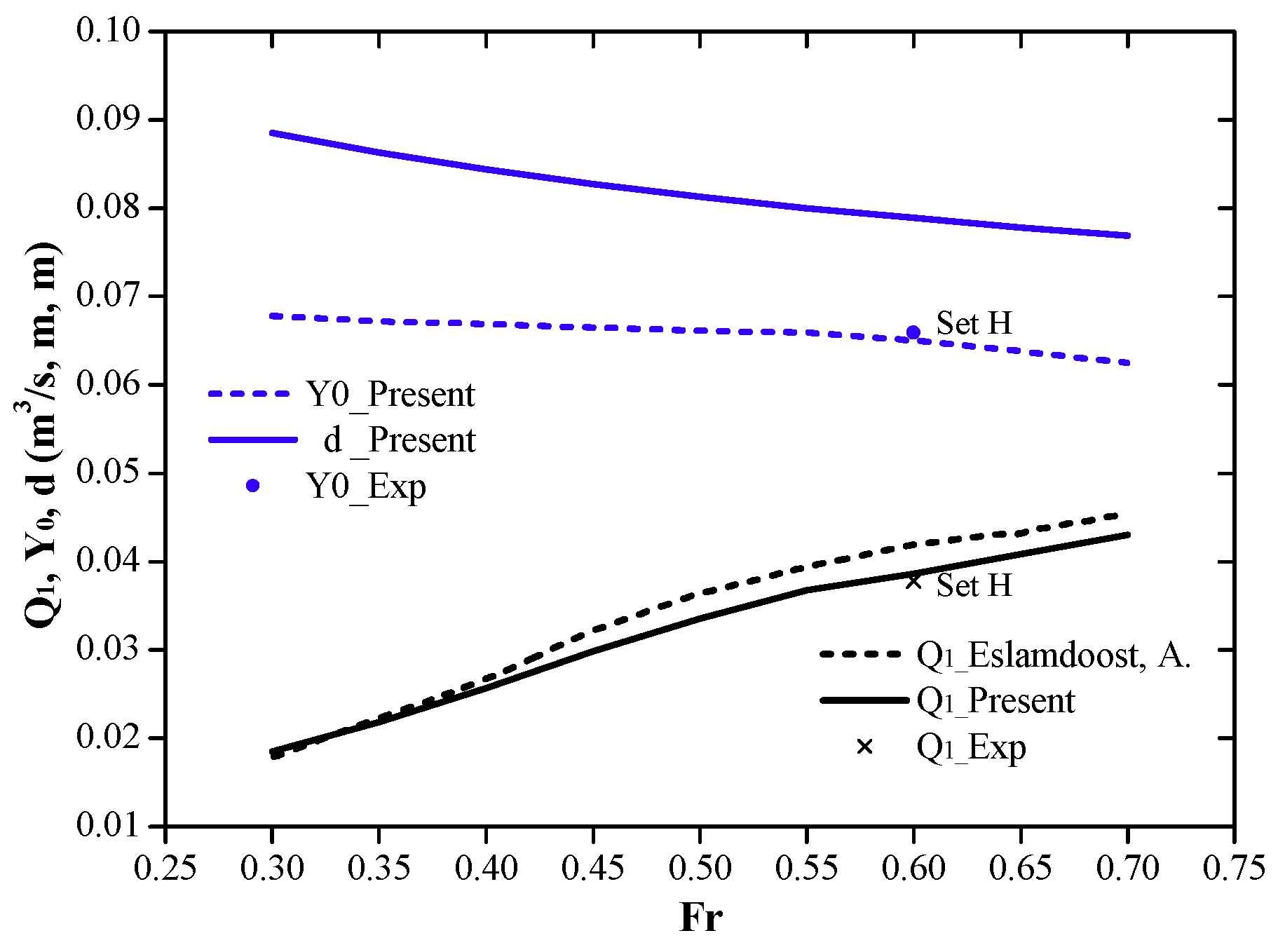
4.2. Validation for Capture Area Parameters
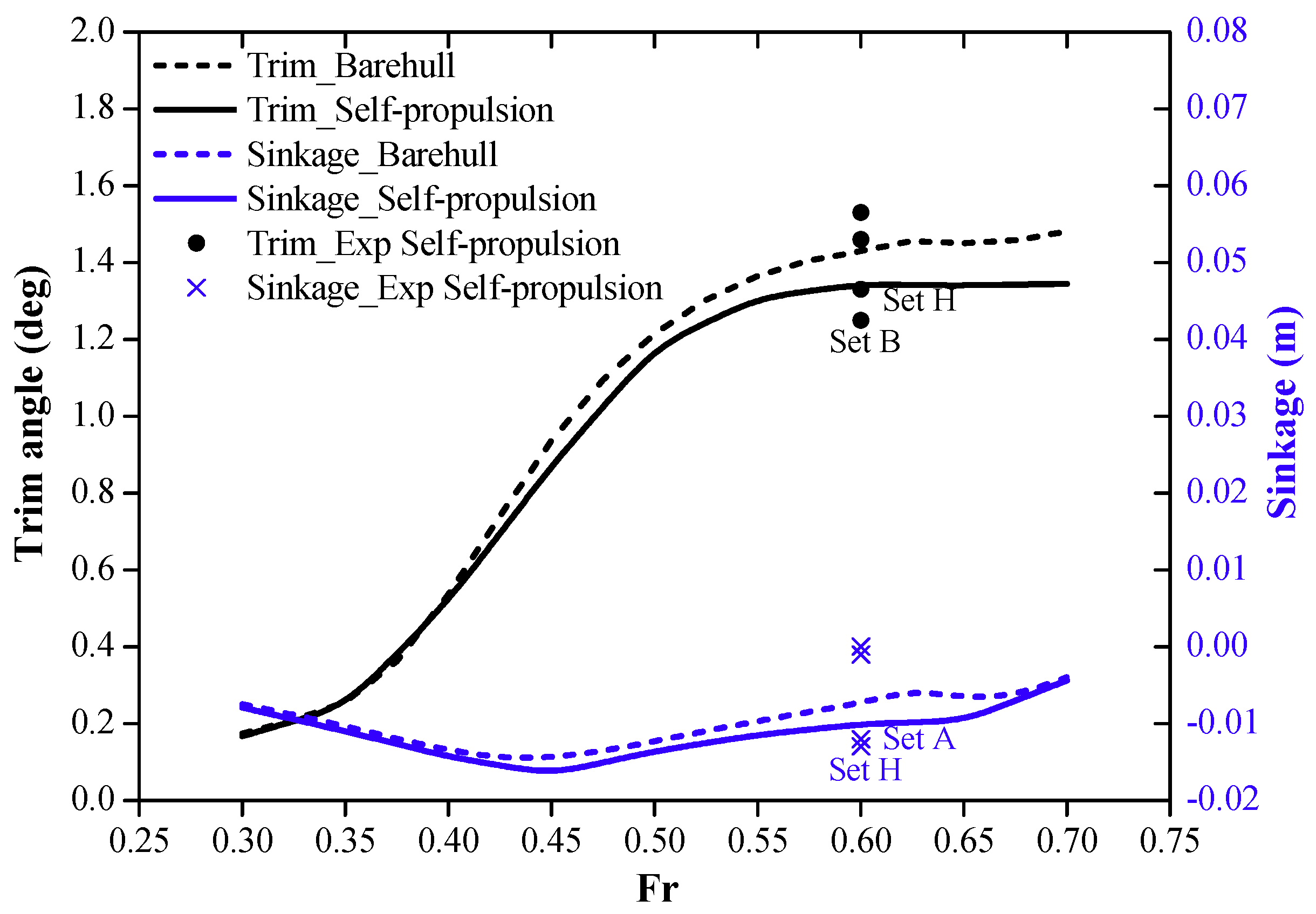
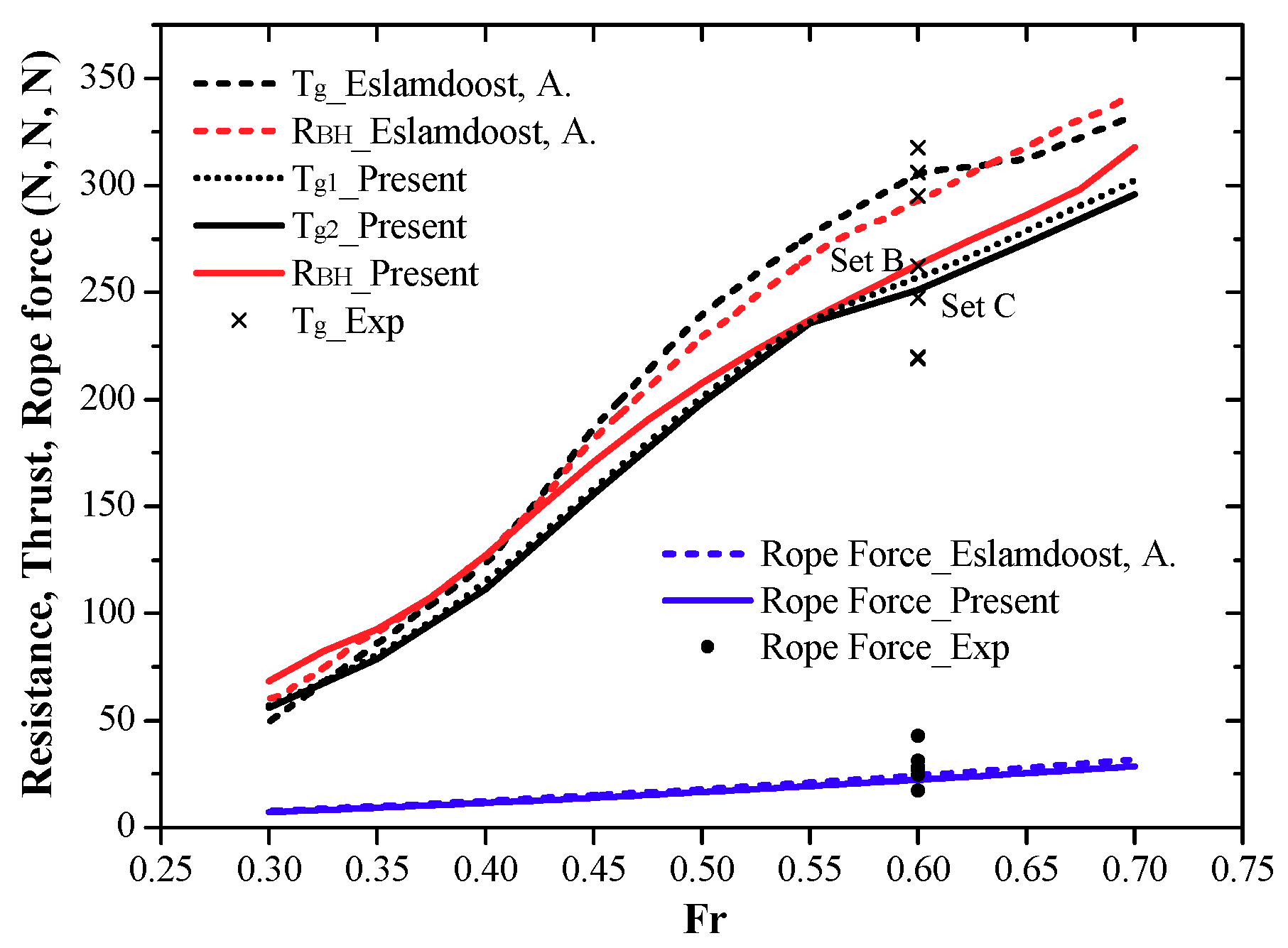
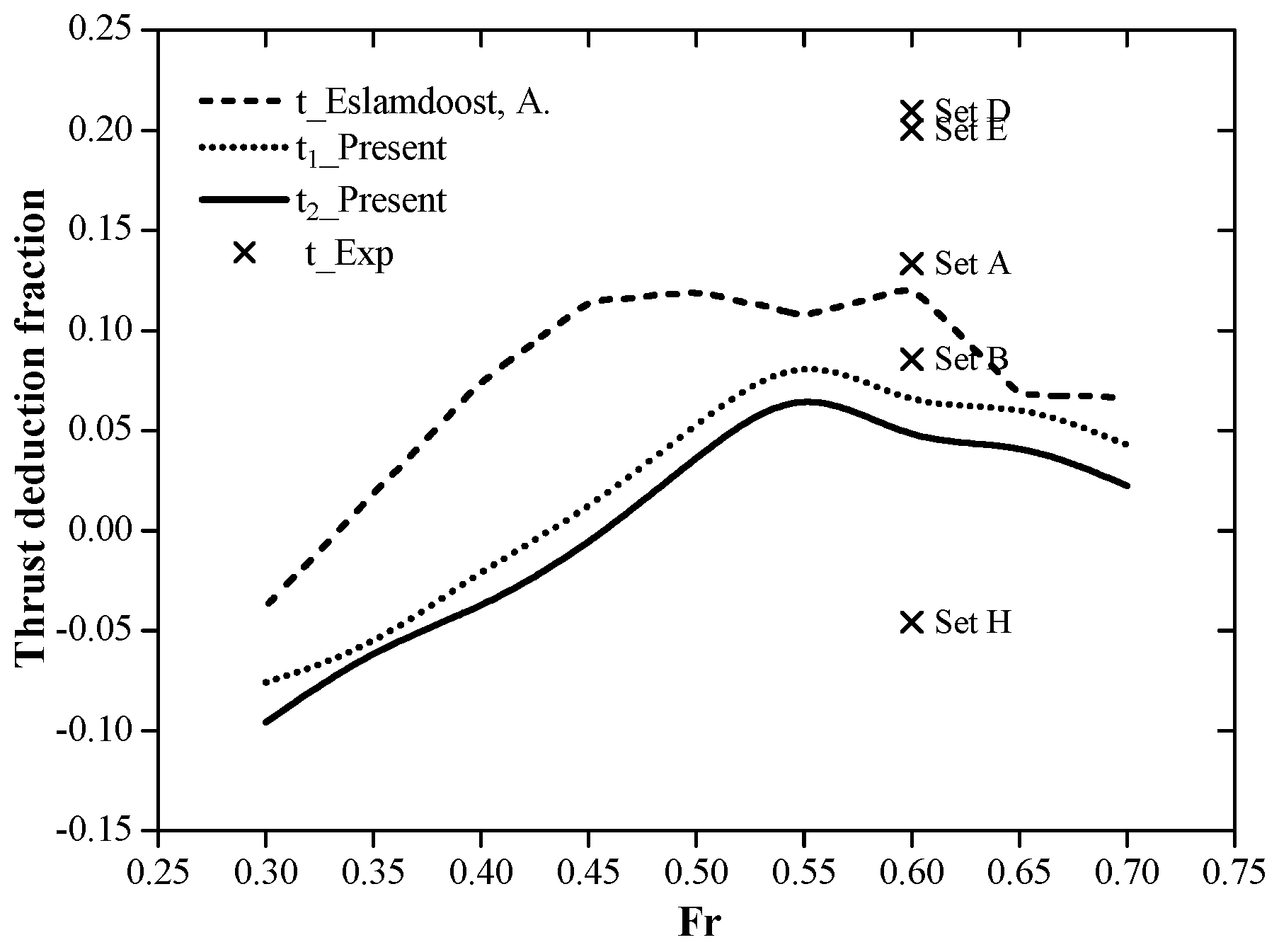
4.3. Validation of Self-Propulsion for the Athena Ship
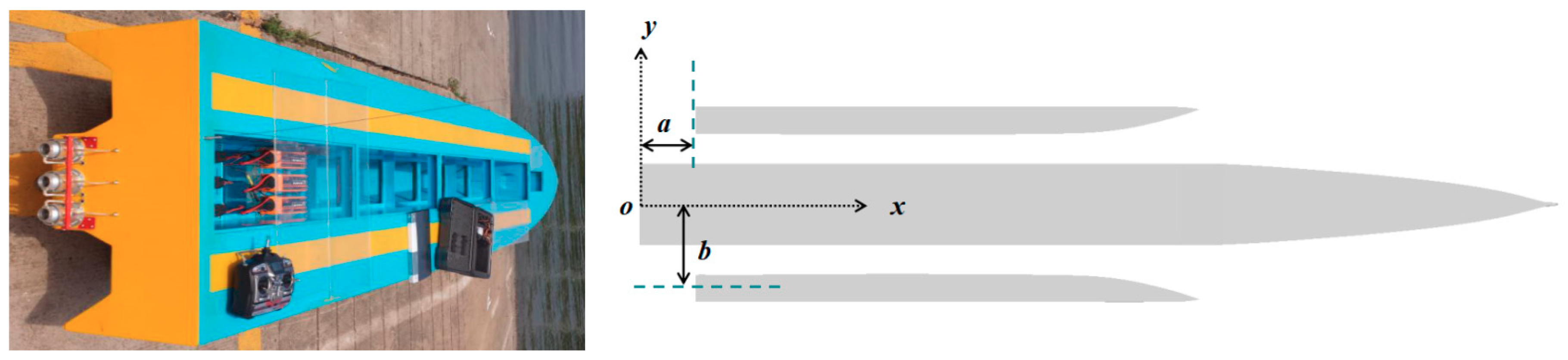
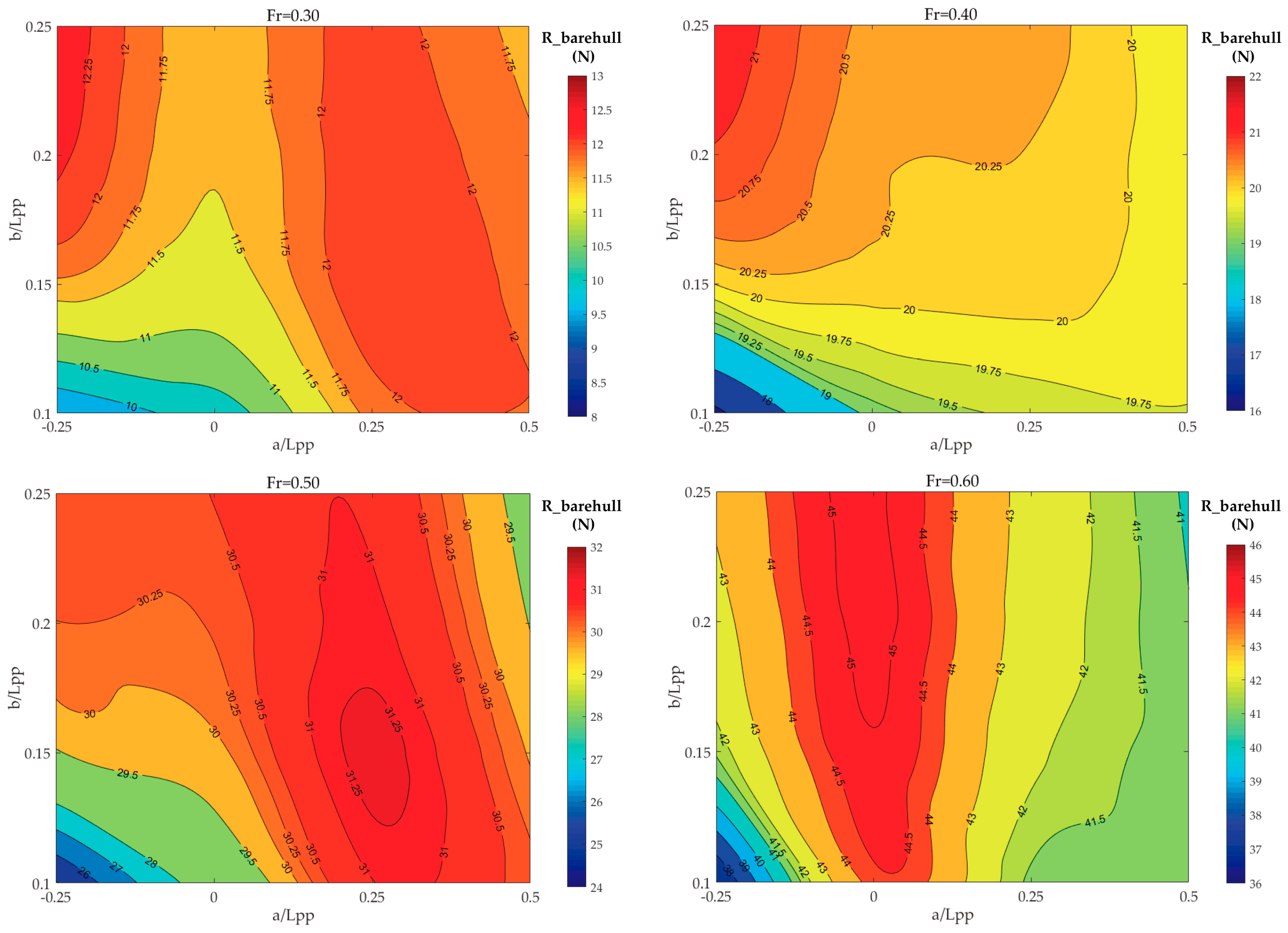
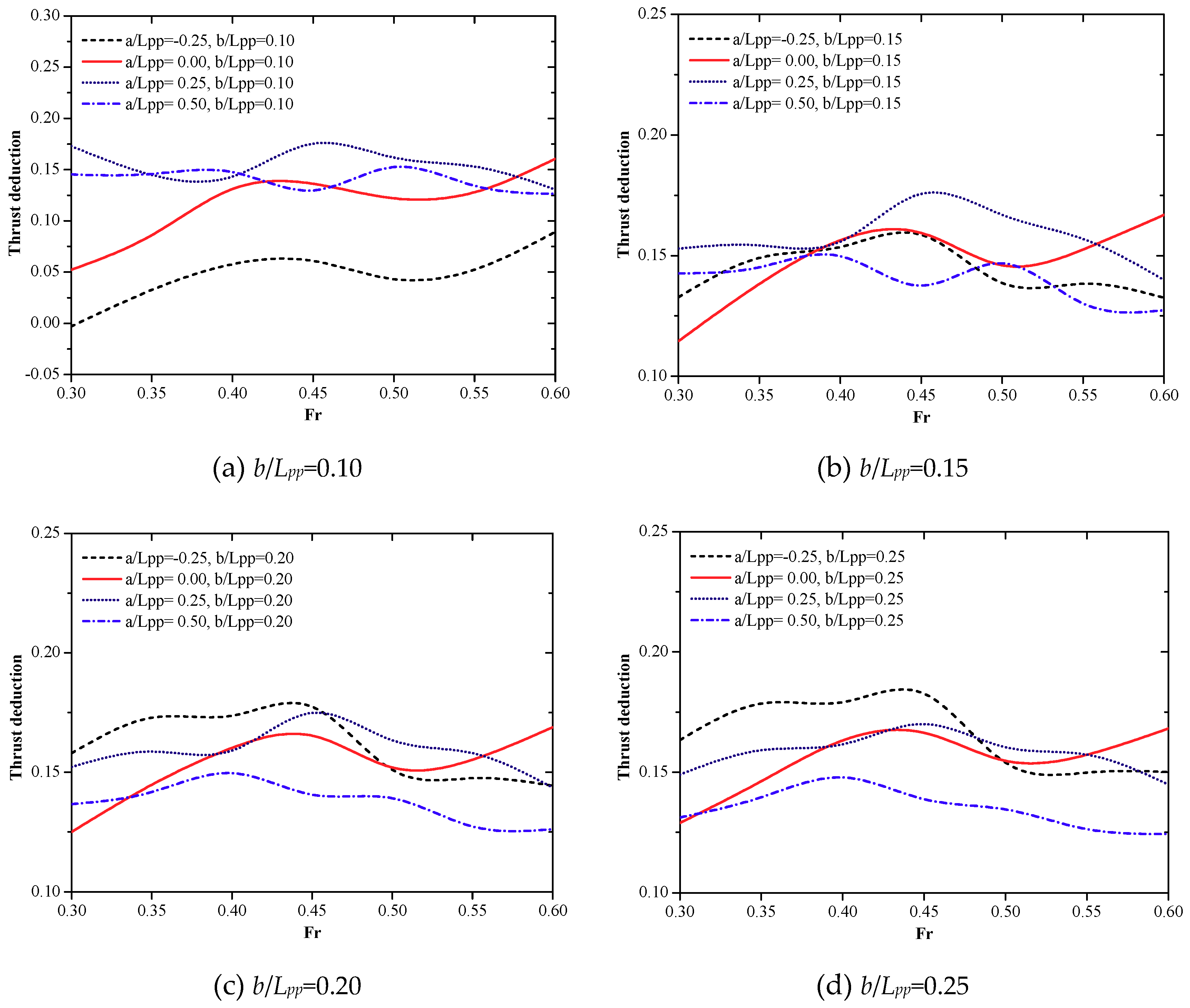
4.4. Application in the Side-Hull Configuration Research for a Trimaran
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Notation
| Area of the capture surface (m2) | Logitudinal distance of side hull | ||
| Duct section area at the impeller (m2) | Transverse distance of the side hull | ||
| Cross section area at midship (m2) | Inlet momentum velocity coefficient | ||
| Area of the nozzle discharge (m2) | Gravity acceleration (m/s2) | ||
| Pressure coefficient of hull panel | Height of the transom edge (m) | ||
| Pressure viscous coefficient | Centroid height of the capture area (m) | ||
| Pump force along x-direction (N) | Centroid height of the nozzle discharge (m) | ||
| IVR | Inlet velocity ratio | Surface normal component along x-direction | |
| K | Local loss coefficient | Field point | |
| Run length of the ship (m) | Average pressure of Capture area (Pa) | ||
| Number of the waterjets units | Average pressure of nozzle discharge (Pa) | ||
| Panel number of free surface | Average dynamic pressure (Pa) | ||
| Panel number of hull | Average static pressure (Pa) | ||
| Total panel number | Source point | ||
| Panel number of nozzle discharge | Distance between field and source point (m) | ||
| NVR | Nozzle velocity ratio | Sinkage of the ship (m) | |
| Pressure force (N) | Thrust deduction | ||
| Pressure after pump area (Pa) | Ship speed (m/s) | ||
| Pressure before pump area (Pa) | Average volumetric velocity of capture area (m/s) | ||
| Constant pressure in the duct (Pa) | Average volumetric velocity of nozzle discharge (m/s) | ||
| Inflow volume per second (m3/s) | Average momentum velocity (m/s) | ||
| Inflow momentum per second (kg·m/s) | Average momentum velocity of capture area (m/s) | ||
| Inflow kinetic energy per second (J/s) | Average momentum velocity of nozzle discharge (m/s) | ||
| Barehull resistance (N) | Longitudinal coordinates the transom (m) | ||
| Duct resistance before pump along x-direction (N) | Transverse coordinates of the transom (m) | ||
| Re | Renold number | Shear stress (Pa) | |
| Frictional resistance (N) | Normal stress (Pa) | ||
| Hull resistance in x-direction (N) | Trim angle (degree) | ||
| Nozzle chamber resistance after pump in x-direction (N) | Pressure jump of virtual disk (Pa) | ||
| Pressure viscous resistance (N) | Density of fluid (kg/m3) | ||
| Hull and duct resistance along x-direction (N) | Correction of frictional coefficient | ||
| Rope force (N) | Boundary layer thickness (m) | ||
| The total force of the waterjet-hull system excludes pressure jump (N) | Fluid viscosity (Pa·s) | ||
| Wave-making resistance (N) | Total velocity potential | ||
| Surface of the nozzle chamber | Perturbation velocity potential | ||
| Wetted surface are of the ship (m2) | Source strength | ||
| Gross thrust of Equation (34) (N) | Width of the capture area (m) | ||
| Gross thrust of Equation (35) (N) | Height of the capture area (m) |
References
- Van, T.T. The effect of waterjet-hull interaction on thrust and propulsive efficiency. In Proceedings of the FAST’91, Trondheim, Norway, 17–21 June 1991. [Google Scholar]
- Alexander, K.; Coop, H.; Terwisga, T. Waterjet-Hull interaction: Recent experimental results. SNAME Trans. 1993, 102, 275–335. [Google Scholar]
- Allison, J. Marine waterjet propulsion. SNAME Trans. 1993, 101, 275–335. [Google Scholar]
- Okamoto, Y.; Sugioka, H.; Kitamura, Y. On the pressure distribution of a waterjet intake duct in self propulsion conditions. In Proceedings of the FAST’93, Yokohama, Japan, 13–16 December 1993; pp. 843–854. [Google Scholar]
- ITTC. The specialist committee on waterjets. Final report and recommendations to the 21st ITTC. In Proceedings of the 21st International Towing Tank Conference, Trondheim, Norway, 15–21 September 1996. [Google Scholar]
- Watson, S.J.P. The Use of CFD in sensitivity studies of inlet design. In Proceedings of the RINA International Conference on Waterjet Propulsion, Amsterdam, The Netherlands, 22–23 October 1998. [Google Scholar]
- Roberts, J.L.; Walker, G.J. Boundary layer ingestion effects in flush waterjet intakes. In Proceedings of the RINA International Conference on Waterjet Propulsion, Amsterdam, The Netherlands, 22–23 October 1998. [Google Scholar]
- Kimball, R.W. Experimental Investigations and Numerical Modeling of a Mixed Flow Marine Waterjet; Massachusetts Institute of Technology: Cambridge, MA, USA, 2001. [Google Scholar]
- Park, W.G.; Jang, J.H.; Chun, H.H.; Kim, M.C. Numerical flow and performance analysis of waterjet propulsion system. Ocean Eng. 2004, 32, 1740–1761. [Google Scholar] [CrossRef]
- Park, W.G.; Yun, H.S.; Chun, H.H.; Kim, M.C. Numerical flow simulation of flush type intake duct of waterjet. Ocean Eng. 2005, 32, 2107–2120. [Google Scholar] [CrossRef]
- Takai, T. Simulation Based Design for High Speed Sea Lift with Waterjets by High Fidelity URANS Approach; University of Iowa: Iowa City, IA, USA, 2010. [Google Scholar]
- Takai, T.; Kandasamy, M.; Stern, F. Verification and validation study of URANS simulations for an axial waterjet propelled large high-speed ship. J. Mar. Sci. Technol. 2011, 16, 434–447. [Google Scholar] [CrossRef]
- Altosole, M.; Benvenuto, G.; Figari, M.; Campora, U. Dimensionless numerical approaches for the performance prediction of marine waterjet propulsion units. Int. J. Rotat. Mach. 2012, 2012, 321306. [Google Scholar] [CrossRef]
- Eslamdoost, A. The Hydrodynamics of Waterjet/hull Interaction; Chalmers University of Technology: Chalmers, Sweden, 2014. [Google Scholar]
- Eslamdoost, A.; Larsson, L.; Bensow, R. Net and gross thrust in waterjet propulsion. J. Ship Res. 2016, 60, 1–14. [Google Scholar] [CrossRef]
- Li, Y.B.; Gong, J.Y.; Ma, Q.W.; Yan, S.Q. Effects of the terms associated with ϕzz in free surface condition on the attitudes and resistance of different ships. Eng. Anal. Bound. Elem. 2018, 95, 266–285. [Google Scholar] [CrossRef]
- Chybowski, L.; Grządziel, Z.; Gawdzińska, K. Simulation and experimental studies of a multi-tubular floating sea wave damper. Energies 2018, 11, 1012. [Google Scholar] [CrossRef]
- Frederick, S.; Wang, Z.Y.; Yang, J.; Sadat-Hosseini, H.; Mousaviraad, M.; Bhushan, S.; Diez, M.; Yoon, S.H.; Wu, P.C.; Yeon, S.M.; et al. Recent progress in CFD for naval architecture and ocean engineering. J. Hydrodyn. 2015, 27, 1–23. [Google Scholar]
- ITTC. The specialist committee on validation of waterjet test procedures: Final report and recommendations to the 24th ITTC. In Proceedings of the 24th International Towing Tank Conference, Edinburgh, UK, 4–10 September 2005. [Google Scholar]
- Xia, Q.C. Engineering Fluid Mechanics; Shanghai Jiao Tong University Press: Shanghai, China, 2006; pp. 210–213. [Google Scholar]
- Zhou, L.L. Numerical Study of High Speed Ship Tail Wave; Wuhan University of Technology: Wuhan, China, 2012. [Google Scholar]
- Tarafder, M.S.; Suzuki, K. Numerical calculation of free-surface potential flow around a ship using the modified Rankine source panel method. Ocean Eng. 2008, 35, 536–544. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, J.N.; Zhang, H.J.; Shang, Y.C. Numerical research on the added mass of trimaran from transition state to semi-planing state based on the boundary element method. In Proceedings of the ISOPE 2017, San Francisco, CA, USA, 25–30 June 2017; pp. 984–989. [Google Scholar]
- Zhang, L.; Zhang, J.N.; Dong, G.X.; Chen, W.M. Numerical study on the influence of trimaran layout on added mass in semi-planing state. J. Dalian Marit. Univ. 2017, 43, 1–5. [Google Scholar]
- Tarafder, M.S.; Khalil, G.M. Calculation of ship sinkage and trim in deep water using a potential based panel method. Int. J. Appl. Mech. Eng. 2006, 11, 401–414. [Google Scholar]
- Wan, Z.; Liu, X.P.; Fu, P. Calculation of the sinkage and trim of trimaran and their effect on wave making resistance. J. Shanghai Jiaotong Univ. 2010, 44, 1388–1392. [Google Scholar]
- Hou, Y.H.; Huang, S.; Liang, X. Ship hull optimization based on PSO training FRBF neural network. J. Harbin Eng. Univ. 2017, 38, 175–180. [Google Scholar]
- Liu, Z.L.; Yu, R.T.; Zhu, Q.D. Study of a method for calculation boundary layer influence coefficients of ship and boat propelled by water-jet. J. Ship Mech. 2012, 16, 1115–1121. [Google Scholar]
- Fu, T.C.; Karion, A.; Pence, A.; Rice, J.; Walker, D.; Ratcliffe, T. Characterization of the Steady Wave Field of the High Speed Transom Stern Ship-Model 5365 Hull Form; Hydromechanics Department Report; Carderock Division Naval Surface Warface Center: Bethesda, MD, USA, 2005. [Google Scholar]
- Bhushan, S.; Xing, T.; Carrica, P.; Stern, F. Model- and full-scale URANS simulations of Athena resistance, powering, seakeeping, and 5415 maneuvering. J. Ship Res. 2009, 53, 179–198. [Google Scholar]
- Wyatt, D.C.; Fu, T.C.; Taylor, G.L.; Terill, E.J.; Xing, T.; Bhushan, S.; O’Shea, T.T.; Dommermuth, D.G. A comparison of full-scale experimental measurements and computational predictions of the transom-stern wave of the R/V Athena I. In Proceedings of the 27th Symposium on Naval Hydrodynamics, Seoul, Korea, 5–10 October 2008. [Google Scholar]
- Hurwitz, R.B.; Crook, L.B. Analysis of Wake Survey Experimental Data for Model 5365 Representing the R/V Athena in the DTNSRDC Towing Tank; David W. Taylor Navel Ship Research and Development Center: Bethesda, MD, USA, 1980. [Google Scholar]
- William, G.; Day, J.; Reed, A.M.; Hurwitz, R.B. Full-Scale Propeller Disk Wake Survey and Boundary Layer Velocity Profile Measurements on the 154-Foot Ship R/V Athena; David W. Taylor Navel Ship Research and Development Center: Bethesda, MD, USA, 1980. [Google Scholar]
- Janson, C.E. Potential Flow Panel Methods for the Calculation of Free-Surface Flows with Lift; Chalmers University of Technology: Chalmers, Sweden, 1997. [Google Scholar]
- Jin, P.Z. Waterjet Propulsion for Ships; National Defense Industry Press: Beijing, China, 1986. [Google Scholar]
- Zhang, Z.; Wang, L.X. Estimation for inlet boundary layer affect coefficient around waterjet duct. Ship Boat 2008, 3, 9–14. [Google Scholar]
- Hu, P.; Zangeneh, M. CFD calculation of the flow through a waterjet pump. In Proceedings of the International Conference on Waterjet Propulsion III, RINA, Gothenburg, Sweden, 20–21 February 2001. [Google Scholar]
- Zhang, L.; Zhang, J.N. Optimization Research on the Side Hull Configuration and Position of Trimaran Based on Orthogonal Design Method. J. Wuhan Univ. Technol. Transp. Sci. Eng. 2015, 39, 747–750. [Google Scholar]
- Jin, M.X.; Zhang, J.N.; Zhang, L. Outrigger hulls’ position optimization based on resistance numerical simulation for trimaran. J. Dalian Marit. Univ. 2015, 41, 15–18. [Google Scholar]
- Jia, J.P.; Zong, Z.; Zhang, W.P. Fore-Body trimaran and experimental study of its resistance and motion characteristics. Chin. J. Ship Res. 2011, 6, 9–14. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Athena Ship | Length Lpp (m) | Beam B (m) | Mean Draught T (m) | Displacement Δ (t) | Transom Width Ratio b/B |
|---|---|---|---|---|---|
| Full-scale | 46.94 | 6.68 | 1.72 | 264.2 | 0.828 |
| Model-scale | 5.486 | 0.781 | 0.201 | 0.425 | 0.828 |
| Speed (m/s) | Flow Volume (m3/s) | Distance Between the Inlet Point of the Tangency and Bow (m) | |
|---|---|---|---|
| Ship 1 | 16.00 | 1.09 | 5.0 |
| Ship 2 | 20.58 | 5.23 | 38.0 |
| Method | δ (m) | W (m) | Y0 (m) | ||
|---|---|---|---|---|---|
| Ship 1 | Jin’s | 0.0846 | 0.750 | 0.1342 | 0.9482 |
| Liu’s | 0.0677 | 0.750 | 0.1241 | 0.9399 | |
| Present | 0.0651 | 0.750 | 0.1239 | 0.9414 | |
| Ship 2 | Zhang’s | 0.350 | 0.852 | 0.5160 | 0.8710 |
| Liu’s | 0.451 | 0.852 | 0.4378 | 0.8752 | |
| Present | 0.338 | 0.852 | 0.4342 | 0.8809 |
| Main Hull Length (m) | Main Hull Breadth (m) | Draught (m) | Side-Hull Length (m) | |
|---|---|---|---|---|
| Full-scale | 120.0 | 10.50 | 3.6 | 67.00 |
| Model-scale | 4.0 | 0.35 | 0.12 | 2.23 |
| Side-Hull Parameters | ||||
| a/Lpp | –0.25 | 0.00 | 0.25 | 0.50 |
| b/Lpp | 0.10 | 0.15 | 0.20 | 0.25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhang, J.-N.; Shang, Y.-C. A Potential Flow Theory and Boundary Layer Theory Based Hybrid Method for Waterjet Propulsion. J. Mar. Sci. Eng. 2019, 7, 113. https://doi.org/10.3390/jmse7040113
Zhang L, Zhang J-N, Shang Y-C. A Potential Flow Theory and Boundary Layer Theory Based Hybrid Method for Waterjet Propulsion. Journal of Marine Science and Engineering. 2019; 7(4):113. https://doi.org/10.3390/jmse7040113
Chicago/Turabian StyleZhang, Lei, Jia-Ning Zhang, and Yu-Chen Shang. 2019. "A Potential Flow Theory and Boundary Layer Theory Based Hybrid Method for Waterjet Propulsion" Journal of Marine Science and Engineering 7, no. 4: 113. https://doi.org/10.3390/jmse7040113
APA StyleZhang, L., Zhang, J. -N., & Shang, Y. -C. (2019). A Potential Flow Theory and Boundary Layer Theory Based Hybrid Method for Waterjet Propulsion. Journal of Marine Science and Engineering, 7(4), 113. https://doi.org/10.3390/jmse7040113