Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations

Abstract
:1. Introduction
2. Dynamic Ship Collision-Avoidance System
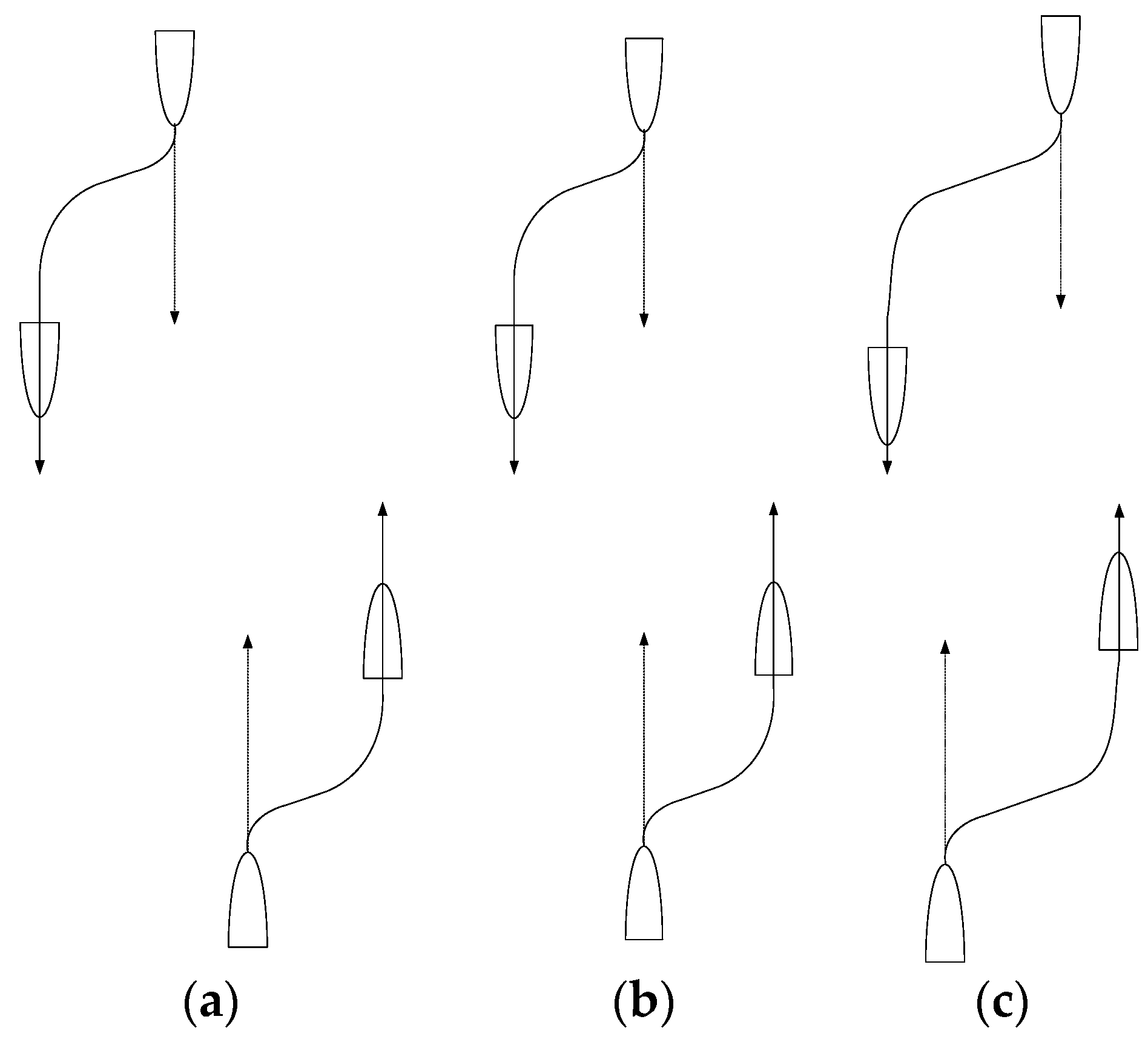
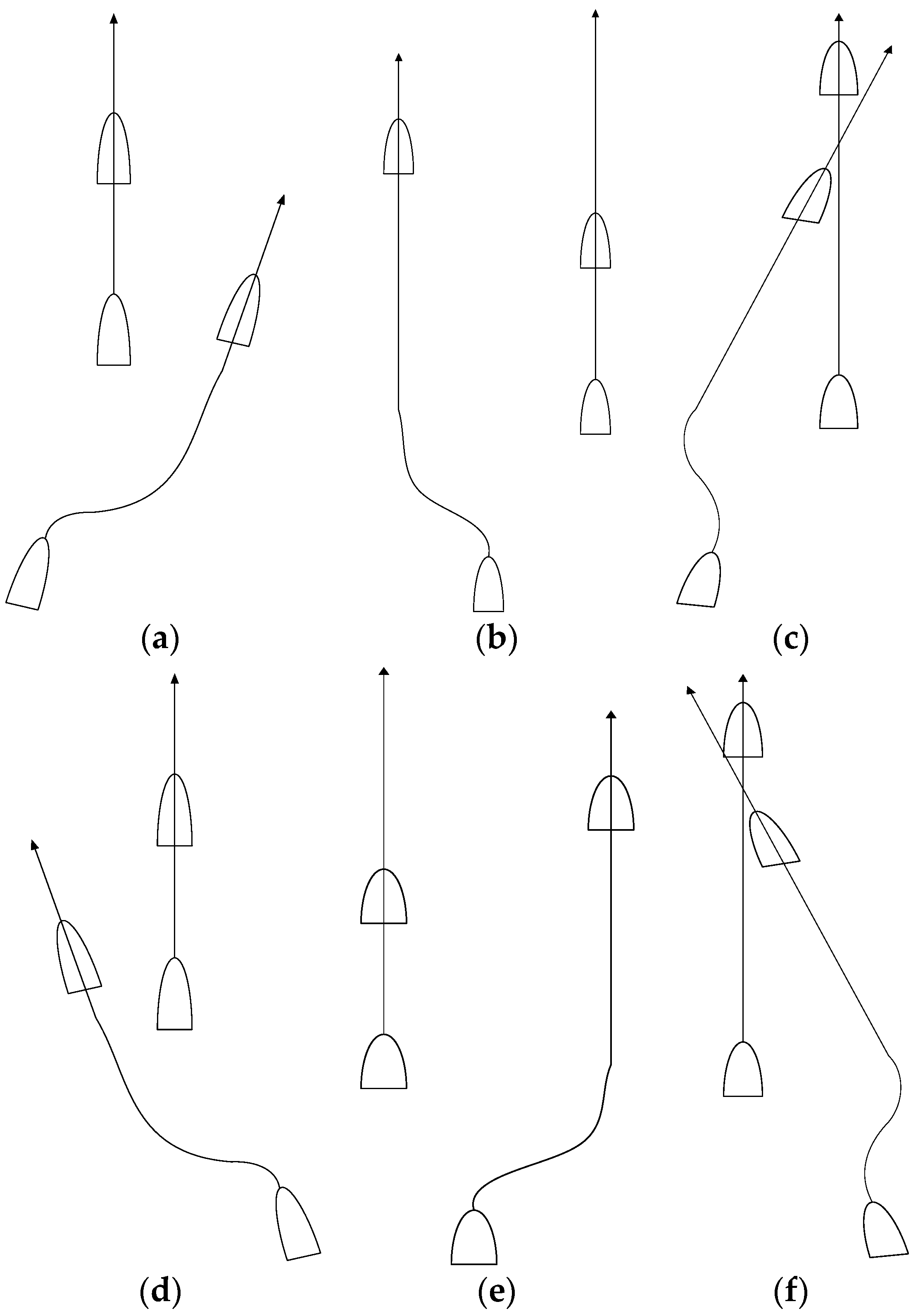
2.1. The Analysis of Encounter Situation
- (1)
- The division is based on the COLREGs, the navigator’s practical practice, and good seamanship.
- (2)
- All types of encounter situations are completely divided, and every encounter that needs to take collision avoidance actions can find corresponding encounter situations to guide collision avoidance behaviour.
- (3)
- The quantitative judgement results for each encounter situation should be unique.
- (4)
- Full accounts should be taken of the incompatibility between the two ships in their understanding and action of the situation.
2.1.1. The Quantified Criteria of Encounter Situations
2.1.2. The Action Manner
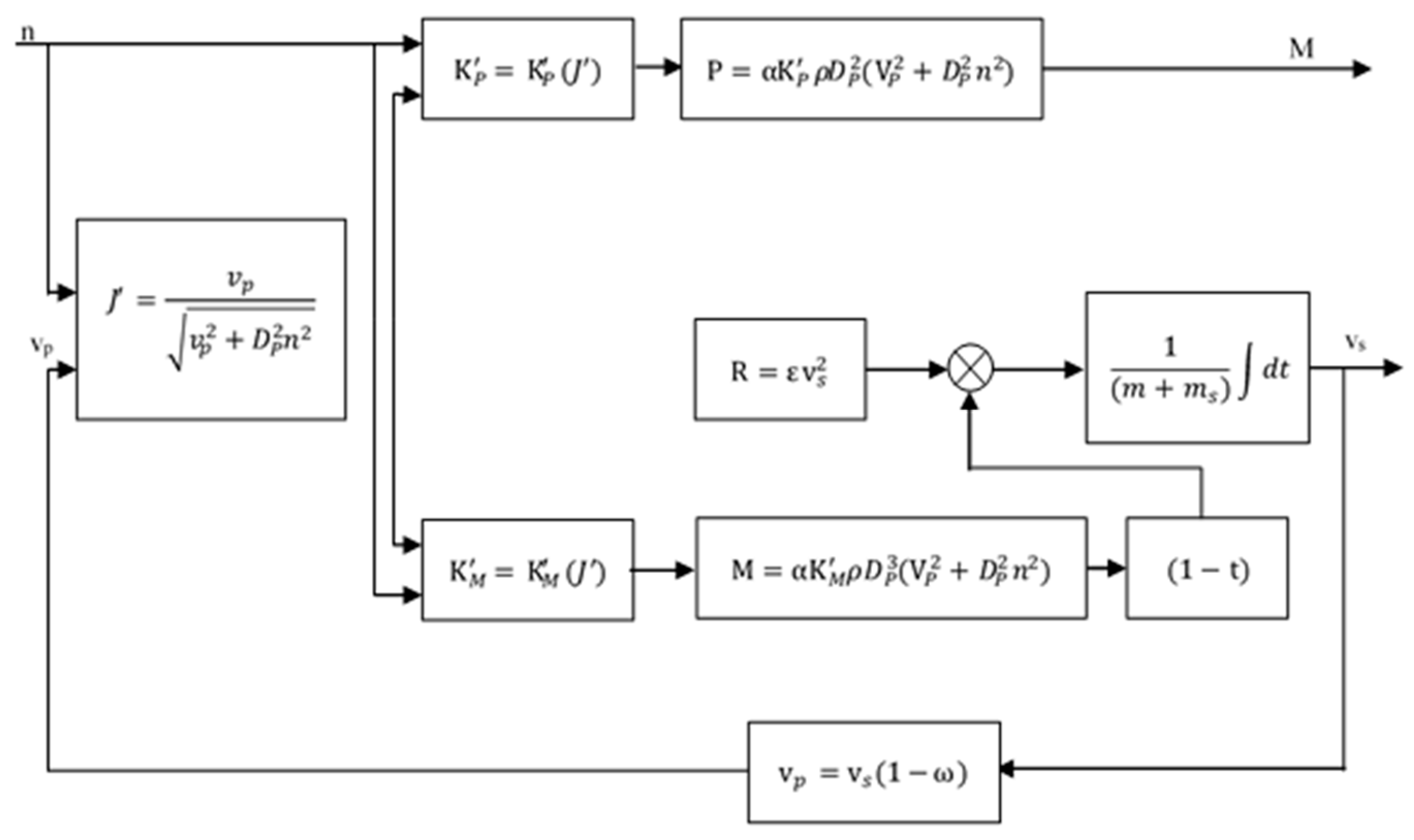
2.2. Ship Manoeuvrability Model
2.2.1. The Manoeuvre of Course Alteration
2.2.2. The Manoeuvre of Speed Reduction
2.3. Trajectory Planning for Collision Avoidance
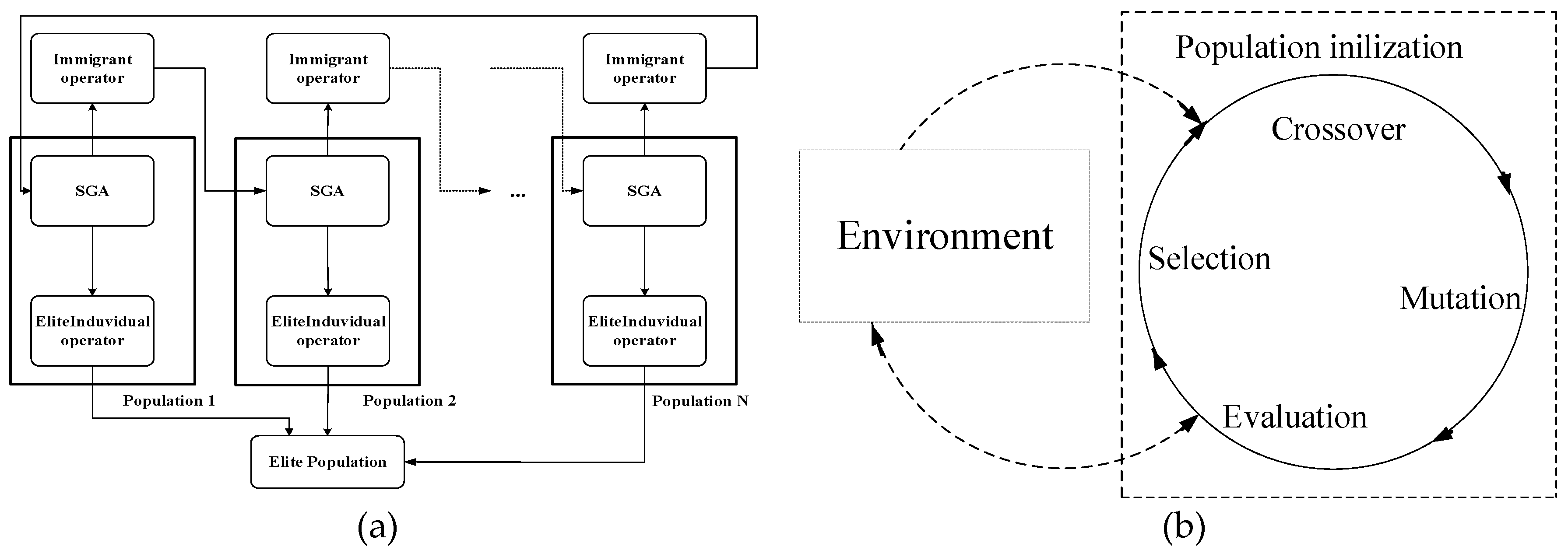
2.3.1. Multiple Genetic Algorithm
Encoding Technique
Constraint Conditions
Fitness Function Model
2.3.2. Linear Extension Algorithm
- 1
- V = VO: OS’s initial speed corresponding propeller revolution speed n = ne
- 2
- n = n−Δn: Δn is a fixed value
- 3
- Obtain the velocity variation curve;
- 4
- Compute the minimum distance and the corresponding time tmin;
- 5
- While DCPA < Ds and V ≥ 0.5VO
- 6
- n = n−Δn;
- 7
- End
- 8
- If t ≥ tmin
- 9
- n → ne: The propeller revolution restores to the initial state
- 10
- End
3. Simulation Results and Analysis
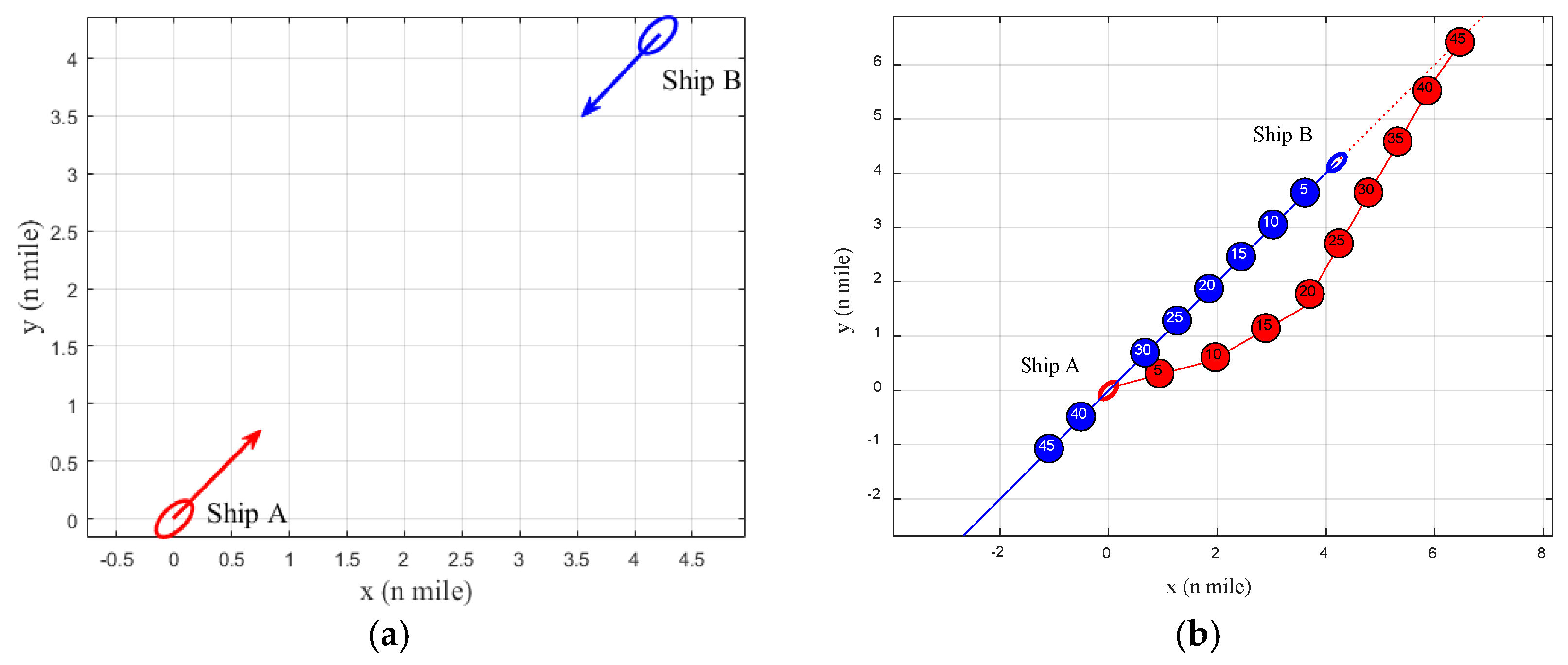
3.1. Case I: Head-On Situation
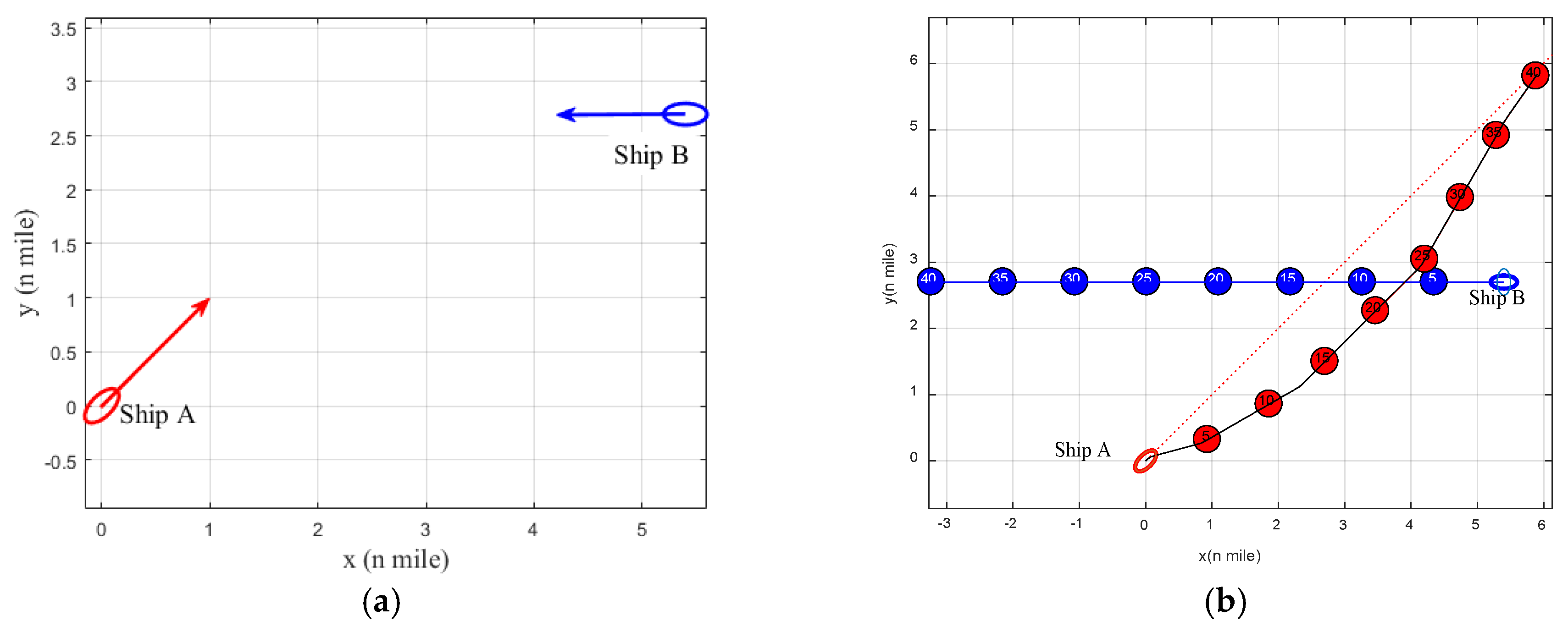
3.2. Case II: Small Angle Crossing Situation
3.3. Case III: Overtaking Situation
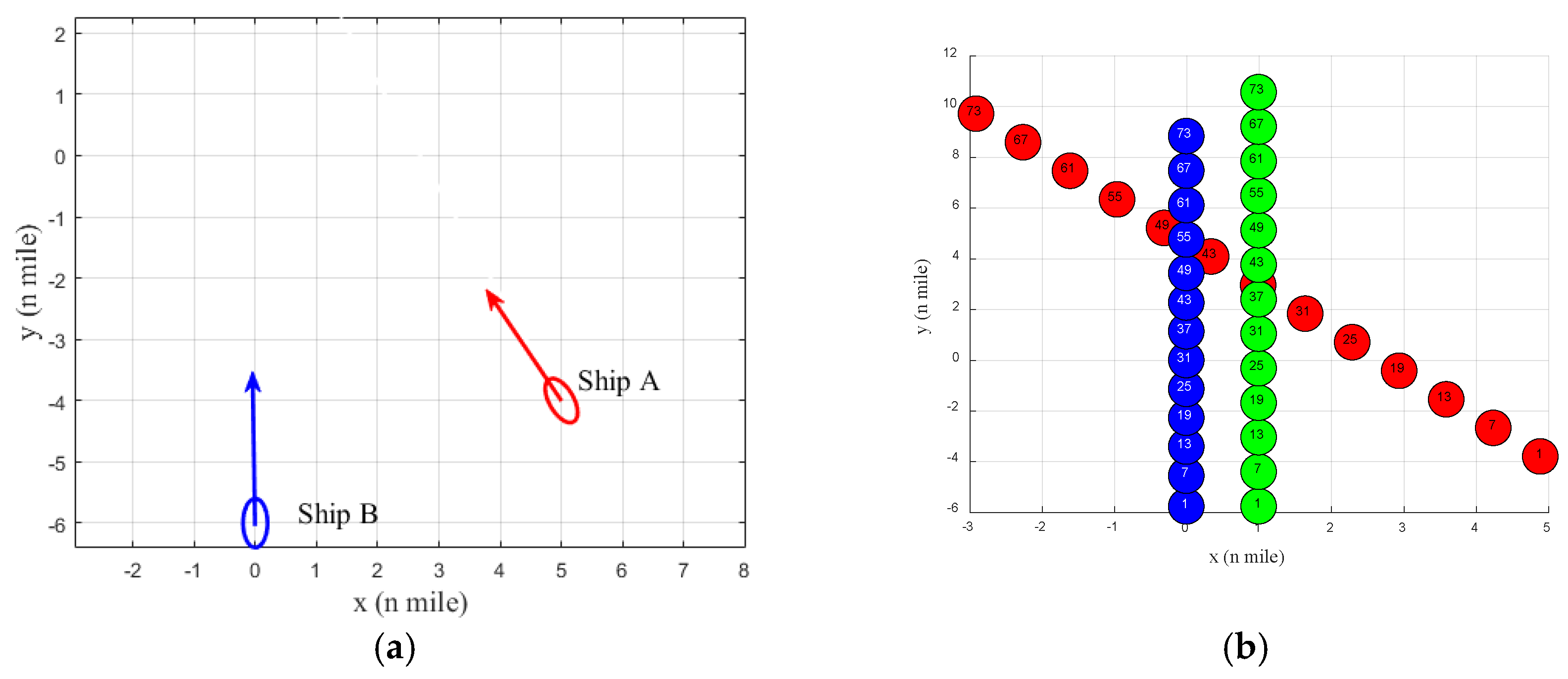
3.4. Case IV: Large Angle Crossing Situation
3.5. Analysis and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| CT | TS‘s heading crossing angle with respect to OS | Ki | integral time constant |
| θO | OS’s relative bearing with respect to TS | natural frequency | |
| θT | TS’s relative bearing with respect to OS | ζ | relative damping ratio |
| Ds | radius of the ship domain | Zp | number of propellers |
| R | distance between OS and TS | m, ms | ship mass and additional mass |
| ϕO | the heading of own ship | vs | speed relative to water |
| ϕT | the heading of target ship | vp | propeller speed relative to water |
| δ | rudder angle | t | thrust reduction coefficient |
| K | steering quality index | Rr | ship resistance |
| T | steering quality time constant | P | propeller thrust |
| nD | the rational speed of main engine | M | propeller torque |
| L | overall length of ship | n | propeller revolution speed |
| d | draft | D | propeller diameter |
| D | diameter of the propeller | ω | wake coefficient |
| AR | rudder area | KP | thrust coefficient |
| lp | distance between the gravity and pivoting point | KM | torque coefficient |
| cb | block coefficient of hull | J | advance coefficient |
| m’, m’x m’y | dimensionless values of masslongitudinal added masslateral added mass | A/Ad | disc–square ratio |
| ρ | density of water | Z | blade number |
| Rt | resistance of stable directional voyage | H/D | patch ratio |
| UReo | the effective inflow speed of the rudder | De | destination deviation between the optimal trajectory and the planned route of give-way ship |
| fα (λ) | nominal force gradient against the attack angle | Dt | minimum distance during the movement between any two ships |
| δE | rudder command angle | a weight coefficient indicating the deviation degree between the optimal trajectory and the planned route | |
| TE | time constant | a weight coefficient indicating the risk of collision | |
| KE | gain control of the steering engine | T | time step |
| ϕr | desired heading angle | number of turning points | |
| Kp | proportional gain constant | l | segment step |
| Kd | derivative time constant | ne | rational revolution of propeller |
References
- Ahn, J.H.; Rhee, K.P.; You, Y.J. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]
- Kim, D.; Hirayama, K.; Okimoto, T. Distributed stochastic search algorithm for multi-ship encounter situations. J. Navig. 2017, 70, 1–20. [Google Scholar] [CrossRef]
- Lazarowska, A. Ship’s Trajectory planning for collision avoidance at sea based on ant colony optimization. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Naeem, W.; Irwin, G.W.; Yang, A. COLREGs-based collision avoidance strategies for unmanned surface vehicles. Mechatronics 2012, 22, 669–678. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Intelligent ocean navigation and fuzzy-bayesian decision action formulation. IEEE J. Ocean Eng. 2012, 37, 204–219. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A method of determining and visualizing safe motion parameters of a ship navigating in restricted waters. Ocean Eng. 2017, 129, 363–373. [Google Scholar] [CrossRef]
- Tam, C.K.; Bucknall, R. Cooperative path planning algorithm for marine surface vessels. Ocean Eng. 2013, 57, 25–33. [Google Scholar] [CrossRef]
- Tsou, M.C. Multi-target collision avoidance route planning under an ECDIS framework. Ocean Eng. 2016, 121, 268–278. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Z.J.; Cai, Y. The ship maneuverability based collision avoidance dynamic support system in close-quarters situations. Ocean Eng. 2018, 146, 486–497. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Soares, C.G. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- The International Maritime Organization (IMO). Conventions on the International Regulations for Preventing Collision at Sea (COLREGs); The International Maritime Organization (IMO): London, UK, 1972. [Google Scholar]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. Collision avoidance using finite control set model predictive control for unmanned surface vehicle. Appl. Sci. 2018, 8, 926. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2018, 1–21. [Google Scholar] [CrossRef]
- Xue, Y.; Clelland, D.; Lee, B.S.; Han, D. Automatic simulation of ship navigation. Ocean Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Wu, Z.L. Collision Avoidance and Watchkeeping, 2th ed.; Dalian Maritime University Press: Dalian, China, 2007. [Google Scholar]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Hong, B.G.; Yang, L.J. Ship Handling; Dalian Maritime University Press: Dalian, China, 2012. [Google Scholar]
- Ni, S.K.; Liu, Z.J.; Cai, Y.; Wang, X. Modelling of ship’s trajectory planning in collision situations by hybrid genetic algorithm. Pol. Marit. Res. 2018, 25, 14–25. [Google Scholar] [CrossRef]
- Cockcroft, A.N.; Lameijer, J.N.F. A Guide to the Collision Avoidance Rules, 4th ed.; Heinemann Newnes: Oxford, UK, 1990. [Google Scholar]
- Coenen, F.P.; Sneaton, G.P.; Bole, A.G. Knowledge based collision avoidance. J. Navig. 1980, 42, 107–116. [Google Scholar] [CrossRef]
- Zheng, Z.Y. Research on Automatic Decision-Making System of Vessel Collision Avoidance; Dalian Maritime University Press: Dalian, China, 2000. [Google Scholar]
- Weng, Y.Z. The knowledge about the field of preventing collisions and expert system. Navig. China 1994, 2, 45–50. [Google Scholar]
- Tam, C.K.; Bucknall, R. Collision risk assessment for ships. J. Mar. Sci. Technol. 2010, 15, 257–273. [Google Scholar] [CrossRef]
- Sun, L.C. The Research on Mathematic Models of Decision-Making in Ship Collision Avoidance; Dalian Maritime University Press: Dalian, China, 2000. [Google Scholar]
- Yang, Y.S.; Ren, J.S. Adaptive fuzzy robust tracking controller design via small gain approach and its application. IEEE Trans. Fuzzy Syst. 2003, 11, 783–795. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Nomoto, K. Modeling of maneuvering behavior of ships with a propeller idling, boosting and reversing. J. Soc. Nav. Archit. Jpn. 1978, 144, 57–69. [Google Scholar] [CrossRef]
- Huang, H.; Shen, A.D.; Chu, J.X. Research on propeller dynamic load simulation system of electric propulsion ship. China Ocean Eng. 2013, 27, 255–263. [Google Scholar] [CrossRef]
- Zhang, W.J.; Tao, H.Y.; Zhu, Y.L. Modeling and dynamic simulation of the propulsion plant. Comput. Simul. 2002, 19, 88–90. (In Chinese) [Google Scholar]
- Li, D.P.; Wang, Z.Y.; Chi, H.H. Chebyshev fit of propeller properties across four quadrants and realization of all-round movement simulation along X-shift of DSV. J. Syst. Simul. 2002, 14, 935–938. (In Chinese) [Google Scholar]
- Shen, A.D.; Huang, X.W.; Zheng, H.Y.; Yang, X.L. Design of a semi-physical simulation system for electric podded propulsion. J. Yangzhou Univ. 2005, 8, 74–78. (In Chinese) [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Description |
|---|---|
| HO | Head-on encounter when OS and TS give way simultaneously |
| OT1 | OS is overtaken by TS when TS gives way |
| OT2 | TS is overtaken by OS when OS gives way |
| CR1 | Crossing encounter when TS gives way |
| CR2 | Crossing encounter when OS gives way |
| SF | Safe encounter |
| Region | HO | CR1 | CR2 | OT1 | OT2 |
|---|---|---|---|---|---|
| P1 θT∈ [0, π/8] ∪ [15π/8,2π] | CT∈ [7π/8, 9π8] Ds ≤ DCPA R ≤ 6 n mile | CT∈ [3π/8,7π8] Ds ≤ DCPA R ≤ 6 n mile | CT∈ [9π/8,13π/8] Ds ≤ DCPA R ≤6 n mile | --- | CT∈ [0,3π/8] ∪ [15π/8,2π] Ds ≤ DCPA R ≤ 3 n mile |
| P2 θT∈ [π/8,π/2] | ----- | ----- | CT∈ [π,2π] θO < 11/8π Ds ≤ DCPA R ≤ 6 n mile | --- | CT∈ [π,2π] θO < 11/8π Ds ≤ DCPA R ≤ 3 n mile |
| P3 θT∈[π/2,5π/8] | --- | --- | CT∈ [3π/2,2π] Ds ≤ DCPA R ≤ 6 n mile | --- | --- |
| P4 θT∈ [5π/8,11π/8] | --- | --- | --- | CT∈ [0,2π] ∪ [3π2,2π] Ds ≤ DCPA R ≤ 3 n mile | --- |
| P5 θT∈[11π/8,3π/2] | CT∈ [0, π/2] Ds ≤ DCPA R≤6n mile | ||||
| P6 θT∈[3π/2,15π/8] | CT∈ [0, π] θO < 5/8π Ds ≤ DCPA R ≤ 6 n mile | CT∈ [0, π] θO > 5/8π Ds ≤ DCPA R ≤ 3 n mile |
| Parameters | Case I | Case II | Case III | Case IV |
|---|---|---|---|---|
| Position of ship A/n mile | (0, 0) | (0, 0) | (0, 0) | (5, −4) |
| Speed of ship A/n mile/h | 13 | 13 | 19.5 | 13 |
| Course of ship A/° | 45 | 45 | 45 | 330 |
| Position of ship B/n mile | (4.2, 4.2) | (5.4, 2.7) | (2.12, 2.12) | (0, −6) |
| Speed of ship B /n mile/h | 10 | 13 | 9 | 13.6 |
| Course of ship B/° | 225 | 270 | 45 | 0 |
| DCPA | 0 | 0.52 | 0 | 0.19 |
| R | 5.9 | 6.0 | 3.0 | 5.4 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Length Overall/m | 126.0 | KE | 1 |
| Breadth/m | 20.0 | TE | 2.5 |
| Draft/m | 8.0 | avv | 1.4 × 10−4 |
| Block coefficient | 0.681 | aδδ | 1.6 × 10−3 |
| Displacement/ton | 14278 | arr | 101.5 |
| N r/m | 120 | ann | 1.4 × 10−2 |
| K | 0.48 | anv | 5.9 × 10−4 |
| T | 216.5 |
| Name | Value | Name | Value |
|---|---|---|---|
| Length overall/m | 189.99 | Propeller moment of inertia/kg × m3 | 22050 |
| Draft/m | 6.0 | Propeller diameter/m | 5.85 |
| Displacement/m3 | 27522 | Pitch ratio | 0.748 |
| Rated speed/n mile/h | 13.6 | Area ratio | 0.558 |
| Rated power of motor/kw | 7440 | Block coefficient | 0.7883 |
| Propeller number | 1 | Diamond coefficient | 0.54 |
| Propeller type | Fixed pitch | Propeller revolution speed/r × min−1 | 108 |
| Propeller blade number | 4 | Mass/kg | 14350 |
| Sequence | ∆ϕ1 (°) | ∆ϕ2 (°) | ∆ϕ3 (°) | ∆ϕ4 (°) | ∆ϕ5 (°) | ∆ϕ6 (°) | ∆ϕ7 (°) | ∆ϕ8 (°) | ∆ϕ9 (°) | ∆ϕ10 (°) |
|---|---|---|---|---|---|---|---|---|---|---|
| Solution 1 | 30 | 0 | −15 | 0 | −30 | 0 | 0 | 0 | 0 | 5 |
| Solution 2 | 30 | 0 | −15 | 0 | −30 | 0 | 0 | 0 | 0 | 5 |
| Solution 3 | 30 | 0 | −15 | 0 | −30 | 0 | 0 | 0 | 0 | 5 |
| Solution 4 | 30 | 0 | −15 | 0 | −30 | 0 | 0 | 0 | 0 | 5 |
| Solution 5 | 30 | 0 | −15 | 0 | −30 | 0 | 0 | 0 | 0 | 5 |
| Sequence | ∆ϕ1 (°) | ∆ϕ2 (°) | ∆ϕ3 (°) | ∆ϕ4 (°) | ∆ϕ5 (°) | ∆ϕ6 (°) | ∆ϕ7 (°) | ∆ϕ8 (°) | ∆ϕ9 (°) | ∆ϕ10 (°) |
|---|---|---|---|---|---|---|---|---|---|---|
| Solution 1 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 2 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 3 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 4 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 5 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Sequence | ∆ϕ1 (°) | ∆ϕ2 (°) | ∆ϕ3 (°) | ∆ϕ4 (°) | ∆ϕ5 (°) | ∆ϕ6 (°) | ∆ϕ7 (°) | ∆ϕ8 (°) | ∆ϕ9 (°) | ∆ϕ10 (°) |
|---|---|---|---|---|---|---|---|---|---|---|
| Solution 1 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 2 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 3 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 4 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Solution 5 | 30 | −15 | −0 | −15 | 0 | 0 | −15 | 0 | 0 | 5 |
| Sequence | Initial Revolution (r/s) | Initial Velocity (n Mile/h) | Reduced Revolution (r/s) | The Reduced Velocity (n Mile/h) | Period of Staying on the New Revolution (s) |
|---|---|---|---|---|---|
| Solution 1 | 1.8 | 13.6 | 0.3 | 1.16 | 2785 |
| Solution 2 | 1.8 | 13.6 | 0.3 | 1.16 | 2785 |
| Solution 3 | 1.8 | 13.6 | 0.3 | 1.16 | 2785 |
| Solution 4 | 1.8 | 13.6 | 0.3 | 1.16 | 2785 |
| Solution 5 | 1.8 | 13.6 | 0.3 | 1.16 | 2785 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, S.; Liu, Z.; Cai, Y. Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations. J. Mar. Sci. Eng. 2019, 7, 90. https://doi.org/10.3390/jmse7040090
Ni S, Liu Z, Cai Y. Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations. Journal of Marine Science and Engineering. 2019; 7(4):90. https://doi.org/10.3390/jmse7040090
Chicago/Turabian StyleNi, Shengke, Zhengjiang Liu, and Yao Cai. 2019. "Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations" Journal of Marine Science and Engineering 7, no. 4: 90. https://doi.org/10.3390/jmse7040090
APA StyleNi, S., Liu, Z., & Cai, Y. (2019). Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations. Journal of Marine Science and Engineering, 7(4), 90. https://doi.org/10.3390/jmse7040090