1. Introduction
Over the past few decades, offshore wind energy has emerged as an attractive alternative to conventional power generation and established itself as a major source of environmentally-friendly, inexhaustible, economical, and importantly renewable energy [
1]. China’s offshore wind energy resources can reach 750 GW [
2]. The development of the offshore wind energy is characterized by more consistent wind, less space constraints and visual impacts on the residents, which has become the main area of the development of China’s wind energy industry.
In shallow waters (<50 m), bottom-fixed substructures, such as gravity-based structures, mono-piles, multi-piles, high-piles, jackets, and buckets are usually applied to support the offshore wind turbines. However, many promising sites are at deeper water depths (>50 m), where bottom-fixed substructures can no longer be used [
3]. A floating structure can be used as an alternative from an economic perspective [
4], such as spar-buoys [
5], semi-submersible [
6], barges [
7], and tension leg platforms (TLP) [
8], which have the advantages of reduced noise during installation, no required scour protection, and cheap anchor installation for the mooring system. However, the floating offshore wind turbine (FOWT) is a rigid and flexible hybrid multi-body system with the complex interaction (aerodynamic-hydrodynamic coupling) of wind turbine (including blades, hub, and nacelle)-tower-support platform-mooring system, which makes the analysis of the dynamic characteristics of the FOWT system extremely complex and challenging [
9].
At present, considerable research on the dynamic characteristics of 5 MW FOWT has been conducted by domestic scholars. Jonkman et al. [
10] developed a HydroDyn module coupled with the original aero-servo-elastic FAST code for land-based wind turbines and analyzed various TLP and barge designs for the NREL (National Renewable Energy Laboratory) 5 MW wind turbines. A TLP support platform for the 5 MW wind turbine was the focus of a study by Matha [
11], whereby its performance was compared to that of other floating platform concepts in load computations, and its major instabilities were identified. Li et al. [
12] investigated the wind-wave-induced global motion responses and mooring tension responses of the 5 MW OC4-DeepCwind semi-submersible FOWT, and a quadratic damping model was developed to gain a better consideration of the viscous performance. Ma et al. [
13] analyzed the motion responses and structural dynamics of the 5 MW OC3-Hywind Spar-type FOWT in different sea states and investigated the coupling effects between various motion modes of the FOWT. Furthermore, the coupled wind-wave-induced analyses of the 5 MW OC3-Hywind FOWT of different hydrodynamic models based on the Morison formula, Pressure integration method, and Panel method was conducted by Madjid [
14], then, the effect of damping and inertia forces of the mooring lines on the mooring line tension responses was discussed. Guo et al. [
15] also analyzed the influence of the dynamic behaviors (including the structural inertial effect and fluid drag) of the mooring lines on the integrated motion responses of the 5 MW Spar-type FOWT based on the improved three-dimensional dynamic catenary theory.
The recent trend in the offshore wind industry is going to larger wind turbines, farther offshore and deeper water due to lack of offshore wind resources in shallow water area [
15]. An ultra-large wind turbine can absorb more wind power, potentially reduce the installation and construction costs, take advantage of economies of scale, and thus capitalize on the stronger and more consistent wind resources farther offshore [
16]. The DTU (Danish University of Science and Technology) 10 MW wind turbine [
17] jointly proposed by the DTU and Vestas Wind Technologies corporation has become an extensively accepted reference wind turbine. Owing to the ultra-large wind turbine requirements of larger support structures, Xue [
18], Tian [
19], and Islam [
20] formulated a preliminary design of a floater to support the 10 MW wind turbine by upscaling the existing 5 MW OC3-Hywind, MIT-TLP, and WindFloat concepts. This design satisfied the basic requirements of hydrostatic stability and dynamic properties of the 10 MW FOWTs. Xu et al. [
21] also considered the DTU 10 MW wind turbine as the research object and used FAST to analyze the dynamic characteristics of the OC3-Hywind Spar-type FOWT under the joint action of the wind-wave-induced loads. However, the ultra-large FOWT was faced with more complicated marine environmental conditions given the increased turbine size. The aeroelastic effects of the giant flexible blades, the large and strong nonlinear motions of the support platform, the strong nonlinear coupling effects between the mooring system and support platform are still to be extensively and thoroughly investigated.
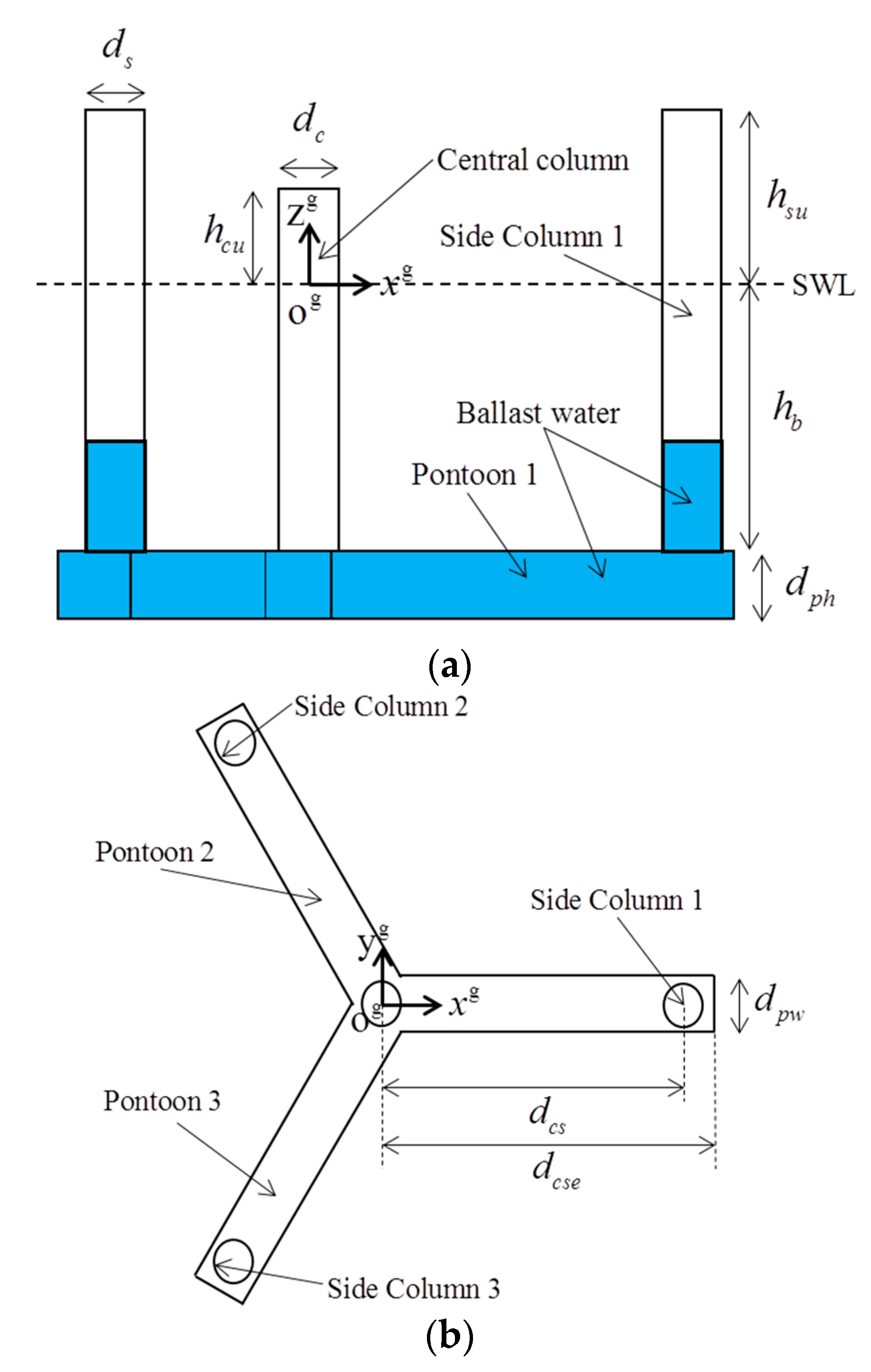
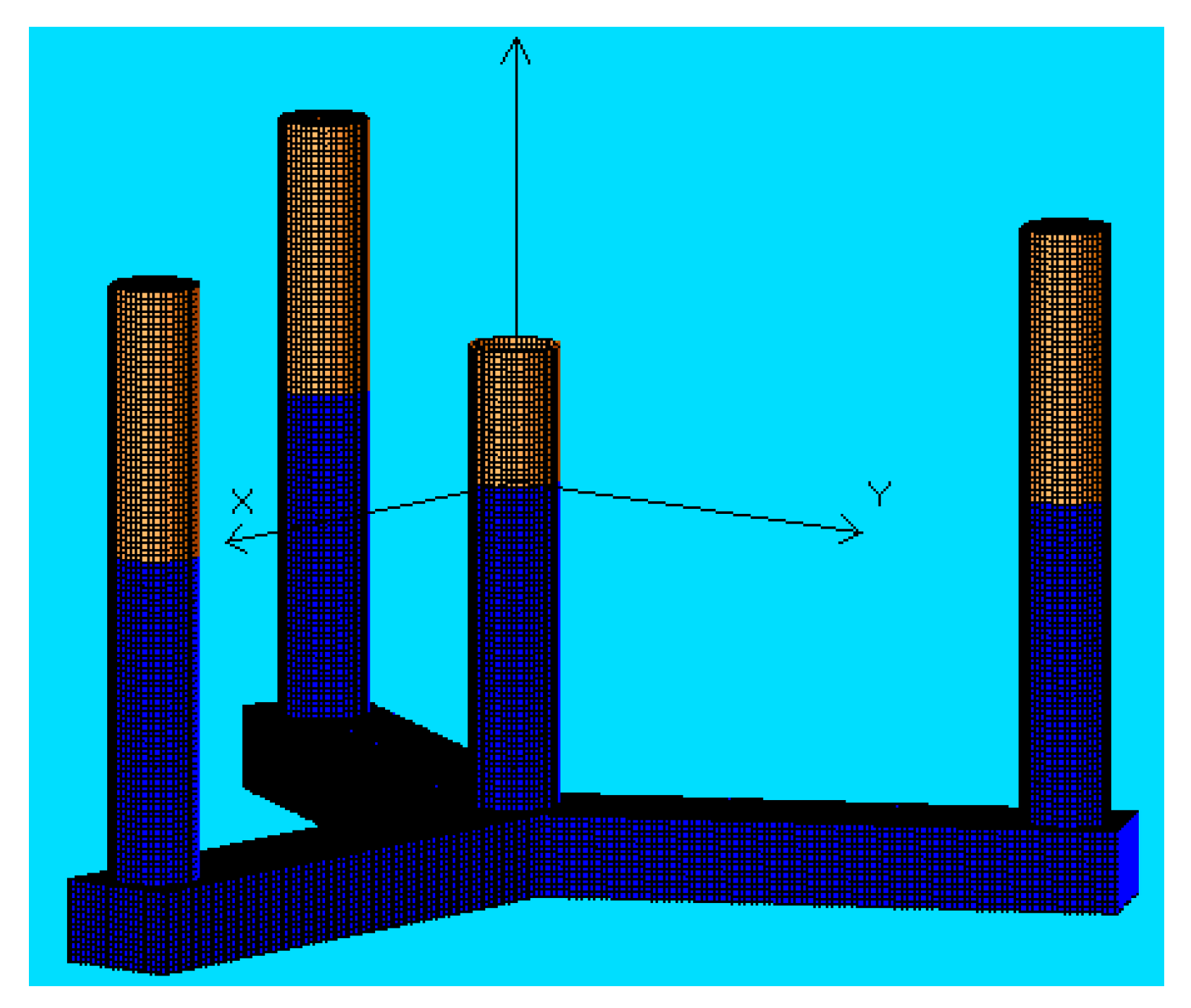
In this study, the DTU 10 MW wind turbine is selected as the research object, and the columns of the braceless semi-submersible wind turbines are connected by pontoons rather than braces, which can reduce design complexity and the construction cost of additional heave plate and avoid the stress concentration effect at the joint [
22]. Therefore, an initial design is performed by upscaling of an existing 5 MW braceless semi-submersible platform design proposed by Luan et al. [
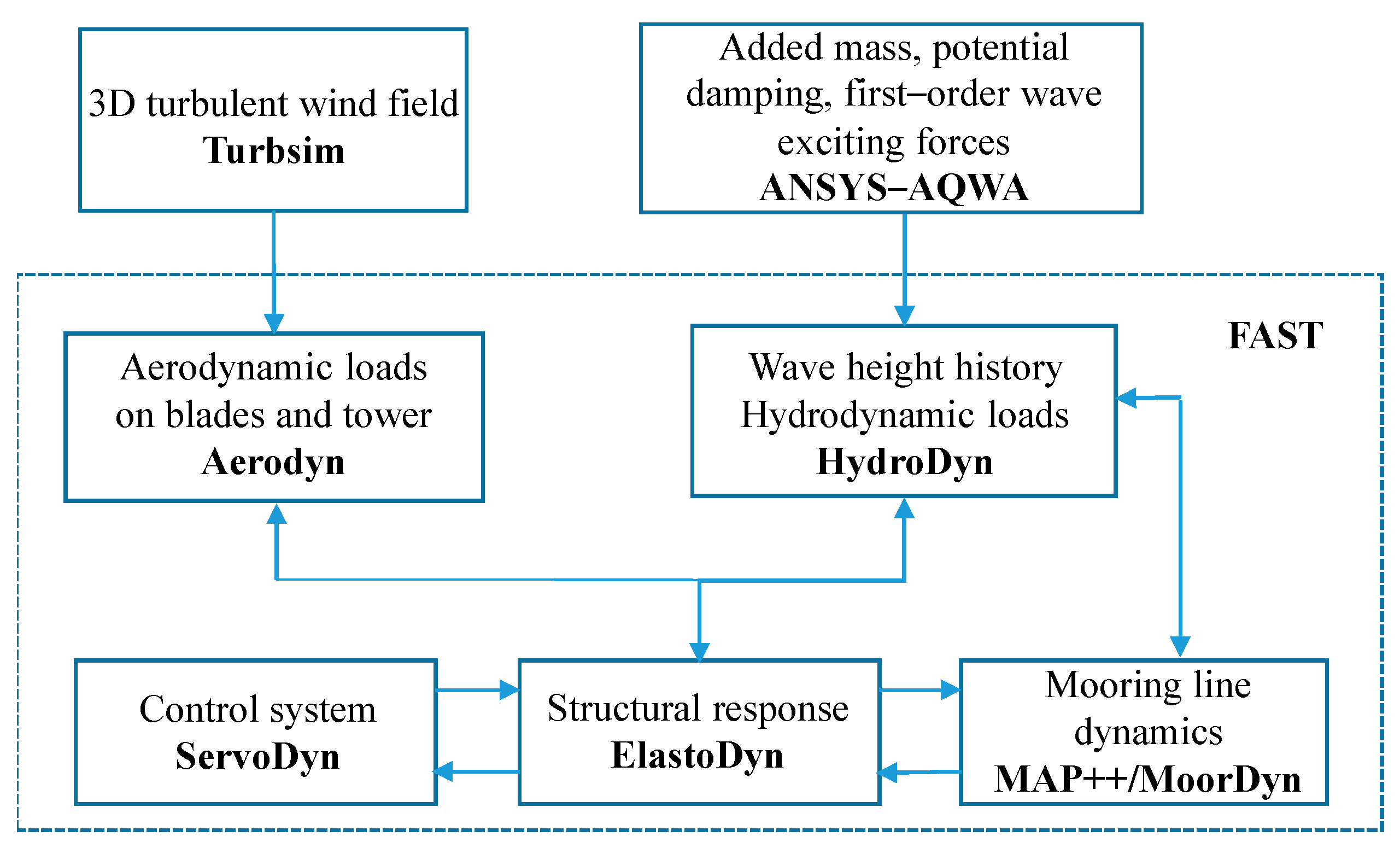
23] to support the DTU 10 MW wind turbines in the moderate water depths (100 m). Aero-hydro-servo-elastic numerical modeling is used to conduct fully coupled time-domain simulation analyses to investigate the dynamic characteristics of the ultra-large semi-submersible FOWT for the selected environmental conditions. Furthermore, the impact of additional dynamic behaviors of the mooring line on the integrated motion responses of the FOWT is studied based on the mooring dynamic analysis modeling, including the hydrodynamic damping and inertia forces of the mooring lines, and compared with the quasi-static modeling. Additionally, the difference in the motion responses and structural dynamics of the NREL 5 MW and DTU 10 MW FOWTs is studied due to the complexity of the dynamic characteristics and coupling mechanism of the ultra-large FOWTs, which can provide a reference for the design and engineering practices of the ultra-large FOWTs.
6. Conclusions
In this study, an initial design was performed by upscaling of an existing 5 MW braceless semi-submersible platform design to support the DTU 10 MW wind turbines and the fully coupled time domain simulation was conducted to investigate the dynamic characteristics of an ultra-large semi-submersible FOWT under typical sea states. The influence of the dynamic effects of the mooring line on the motions of the integrated motion responses of the FOWT was highlighted. Meanwhile, the motion responses and structural dynamics of the DTU 10 MW and NREL 5 MW braceless semi-submersible FOWTs were compared and studied. The conclusions drawn from the study can be summarized as follows:
- (1)
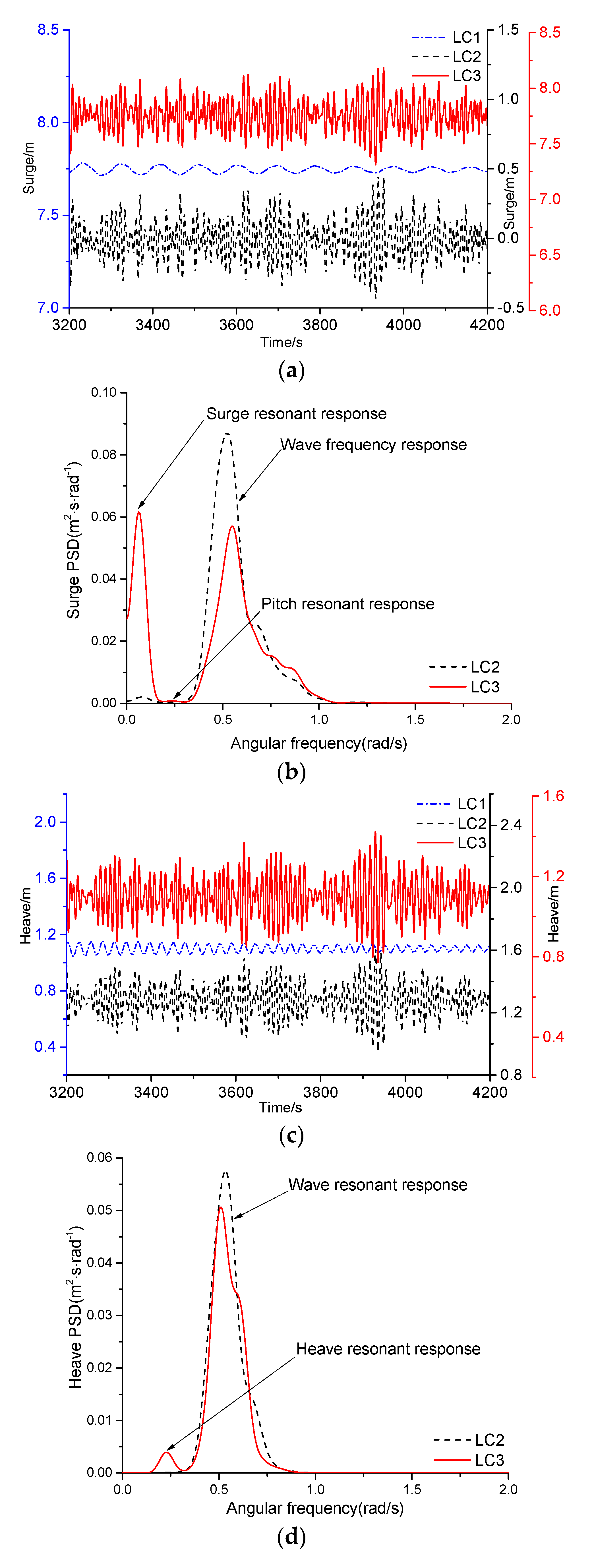
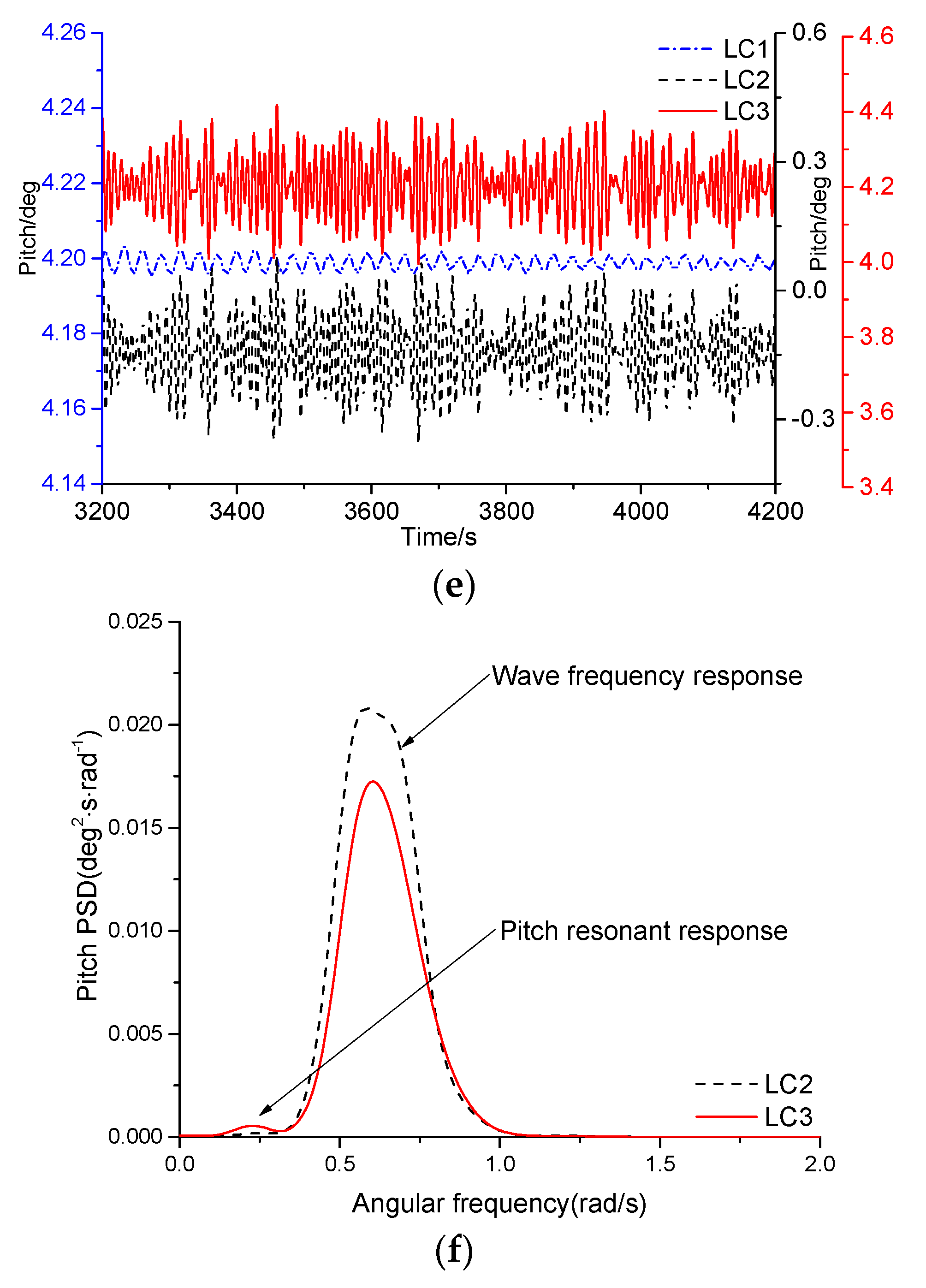
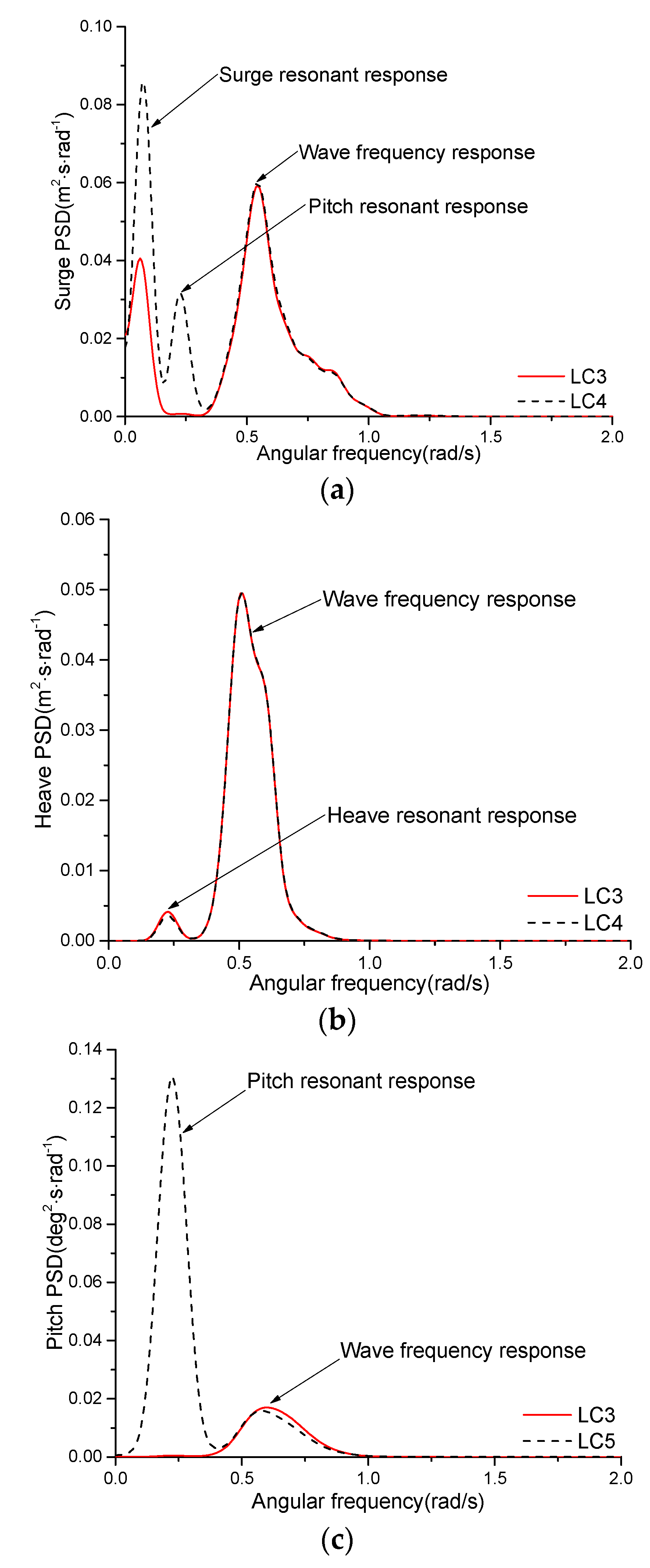
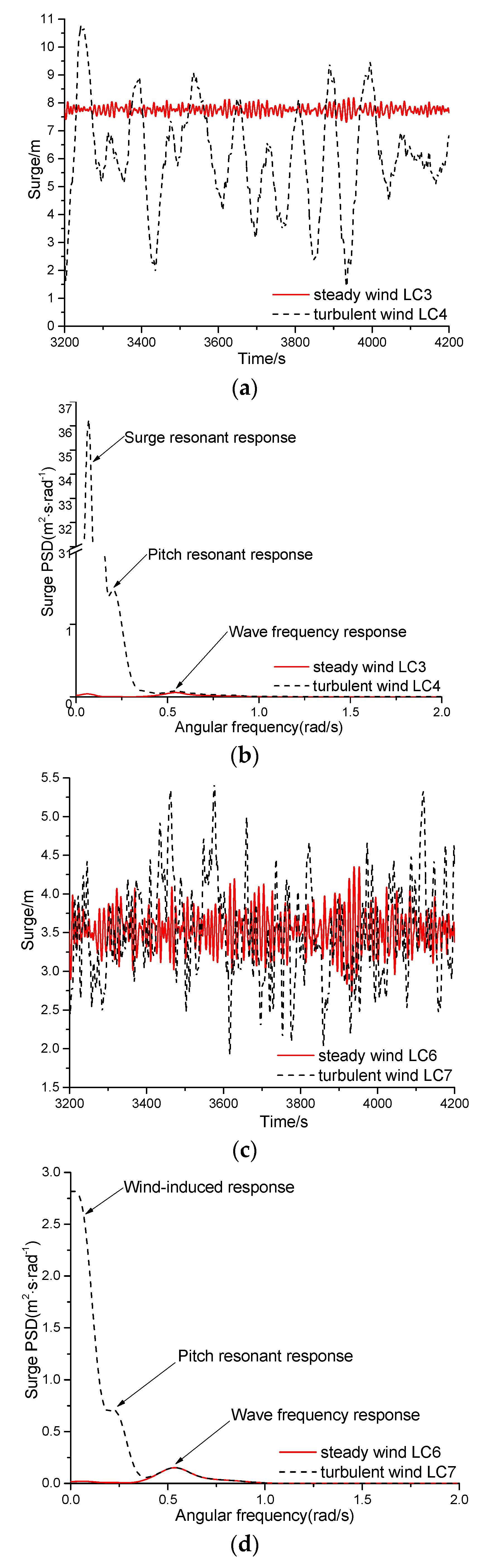
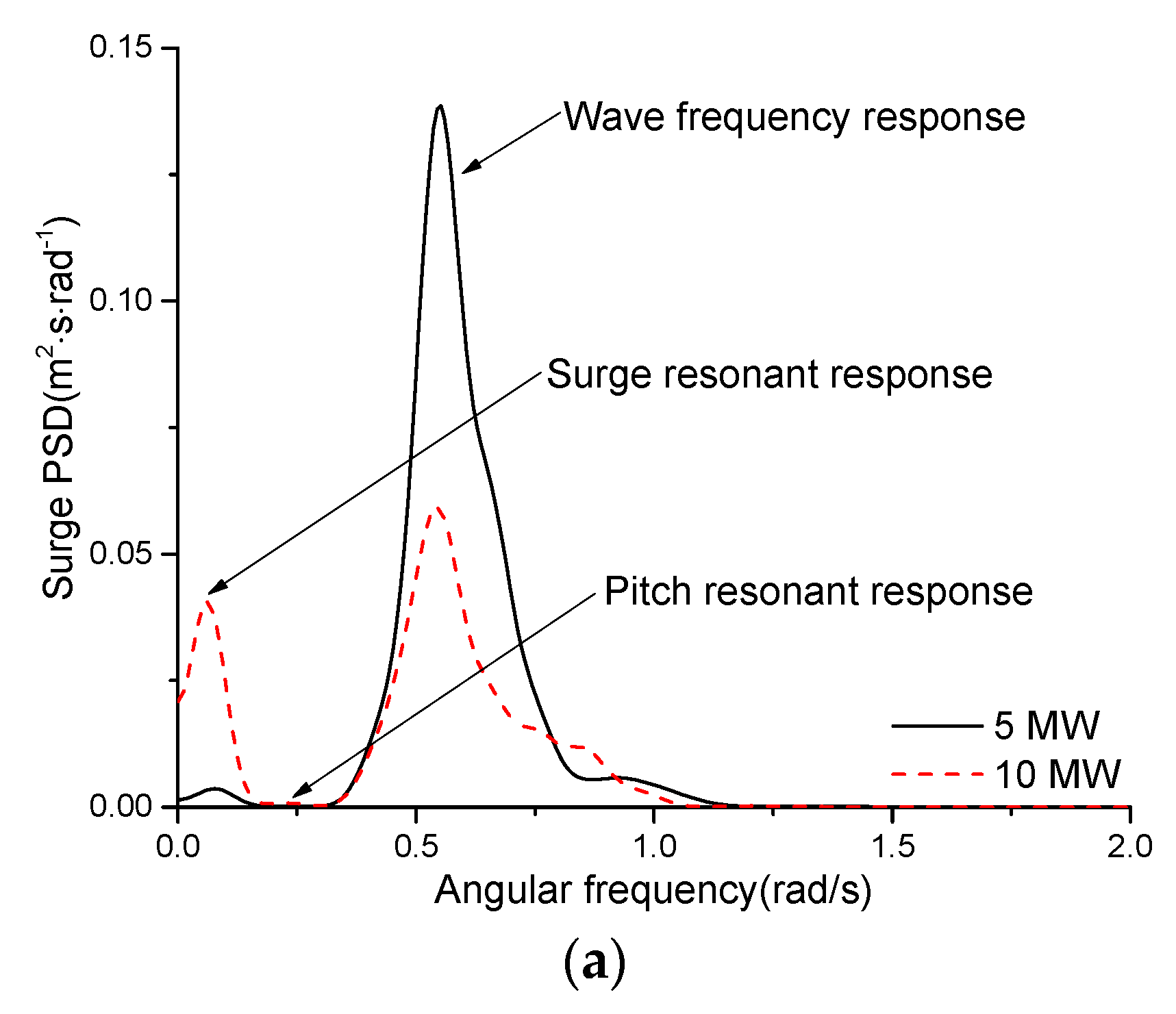
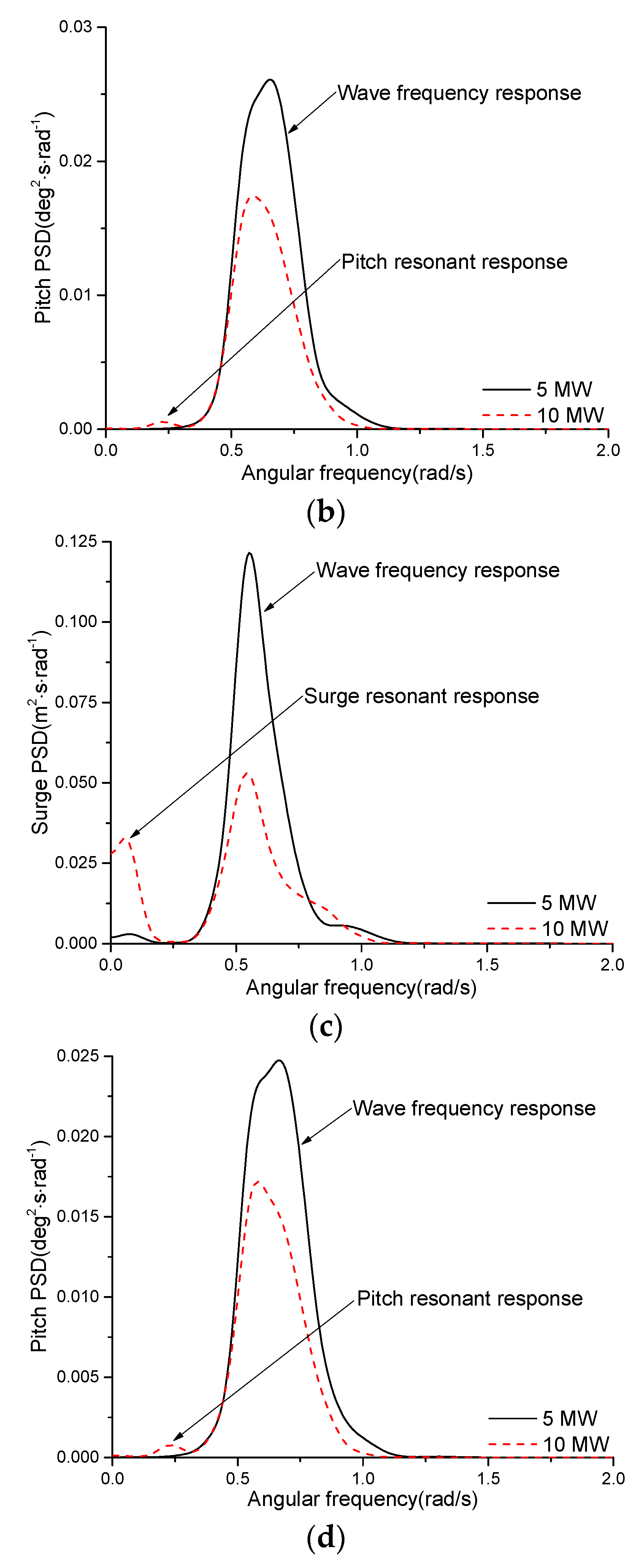
The aerodynamic and wave loads induced motion responses differently and independently. Specifically, in the case of turbulent wind, the low-frequency excitation of the wind loads on the system motions should be more prominent so that the fluctuating components of the system motions increase significantly. Additionally, the surge and pitch resonant responses are significantly increased owing to the negative damping from the blade-pitch controller in the over-rated wind case.
- (2)
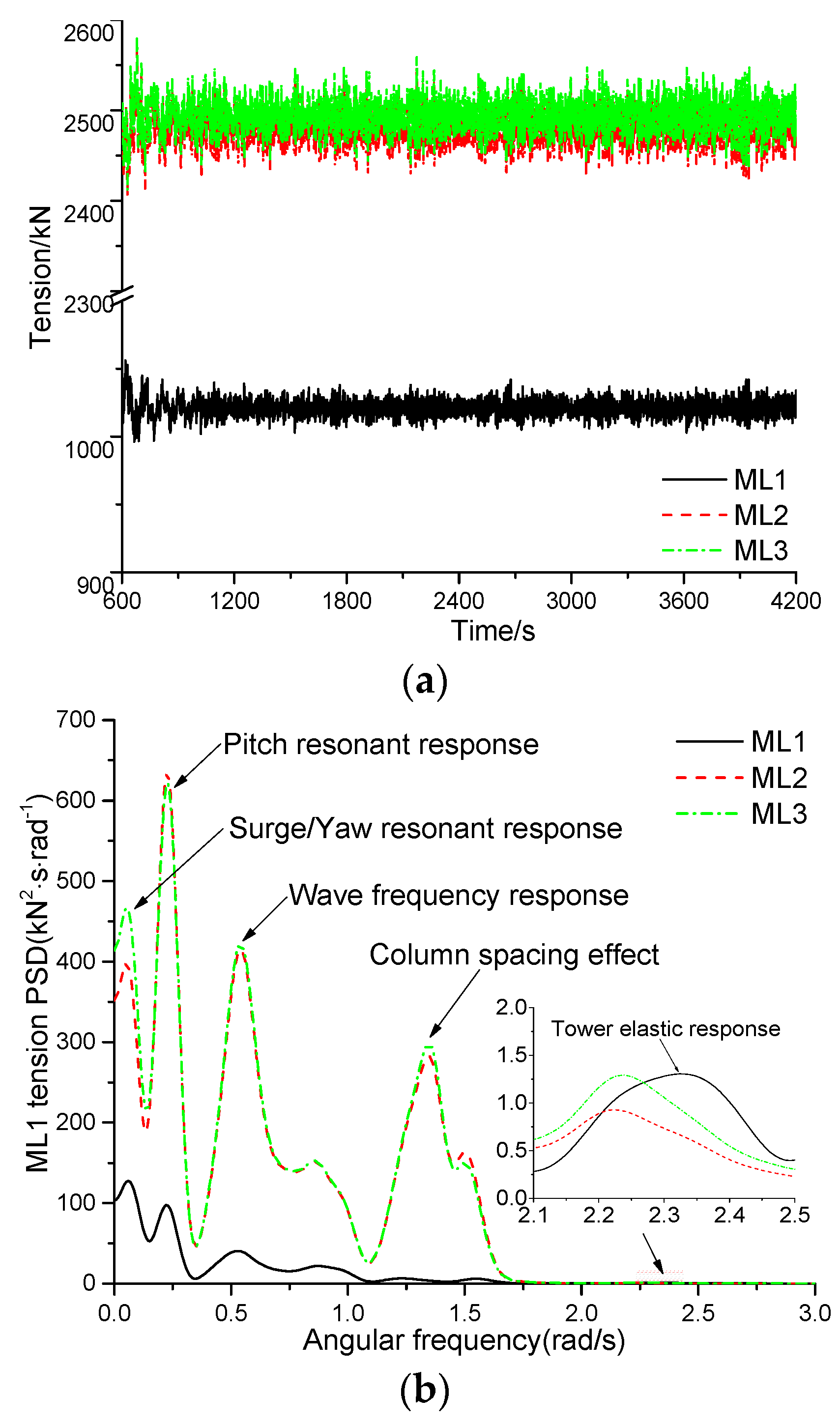
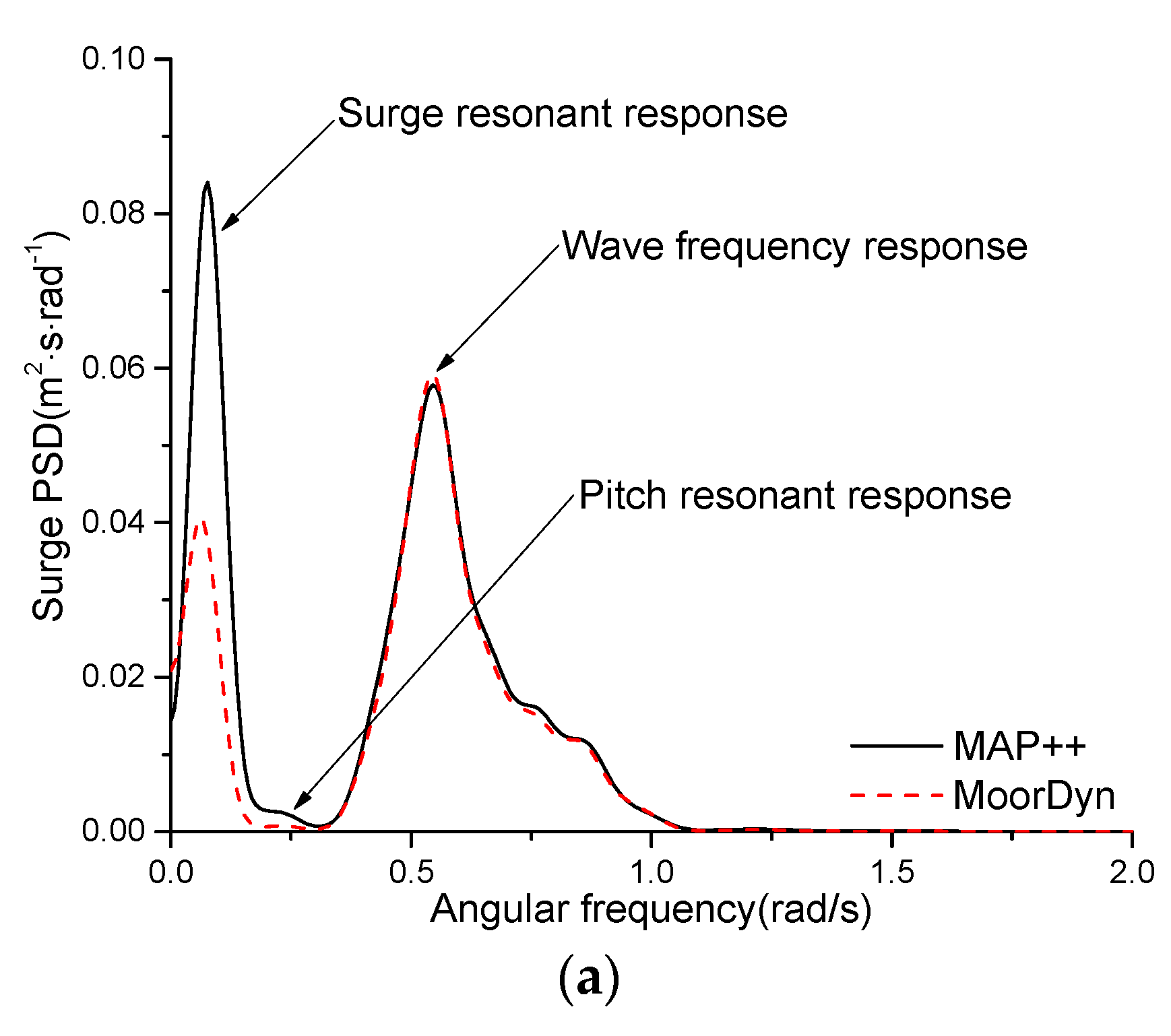
The dynamic effects of the mooring line significantly reduced the low-frequency resonant responses of the system motions but had minor effects on the mean values of the integrated motion responses and the mooring tension responses. Accordingly, the integrated motion responses and the mooring tension responses yielded large standard deviations owing to the dynamic amplification effects. This could provide a valuable reference for the safety evaluation and the mooring line design of the ultra-large FOWT.
- (3)
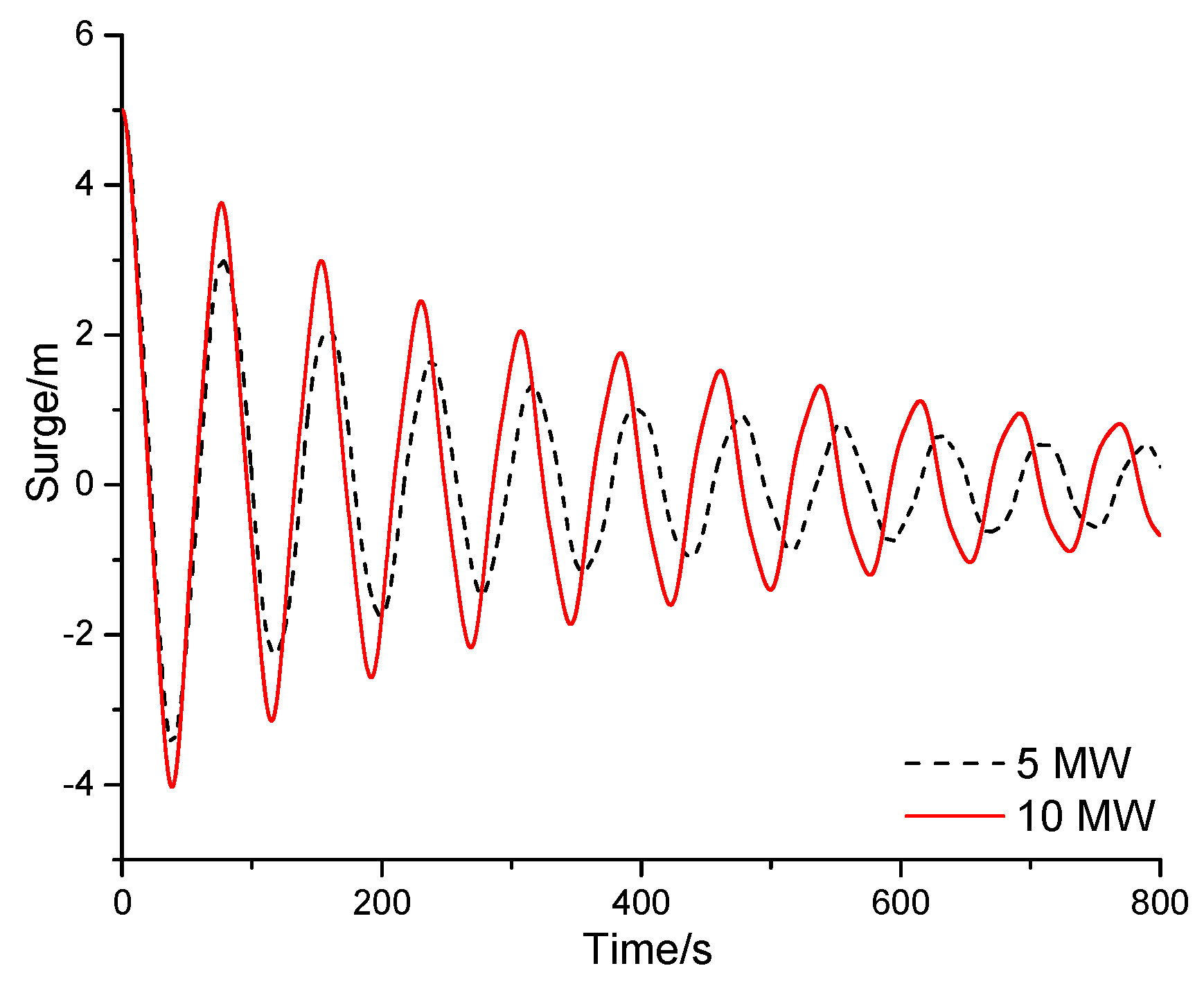
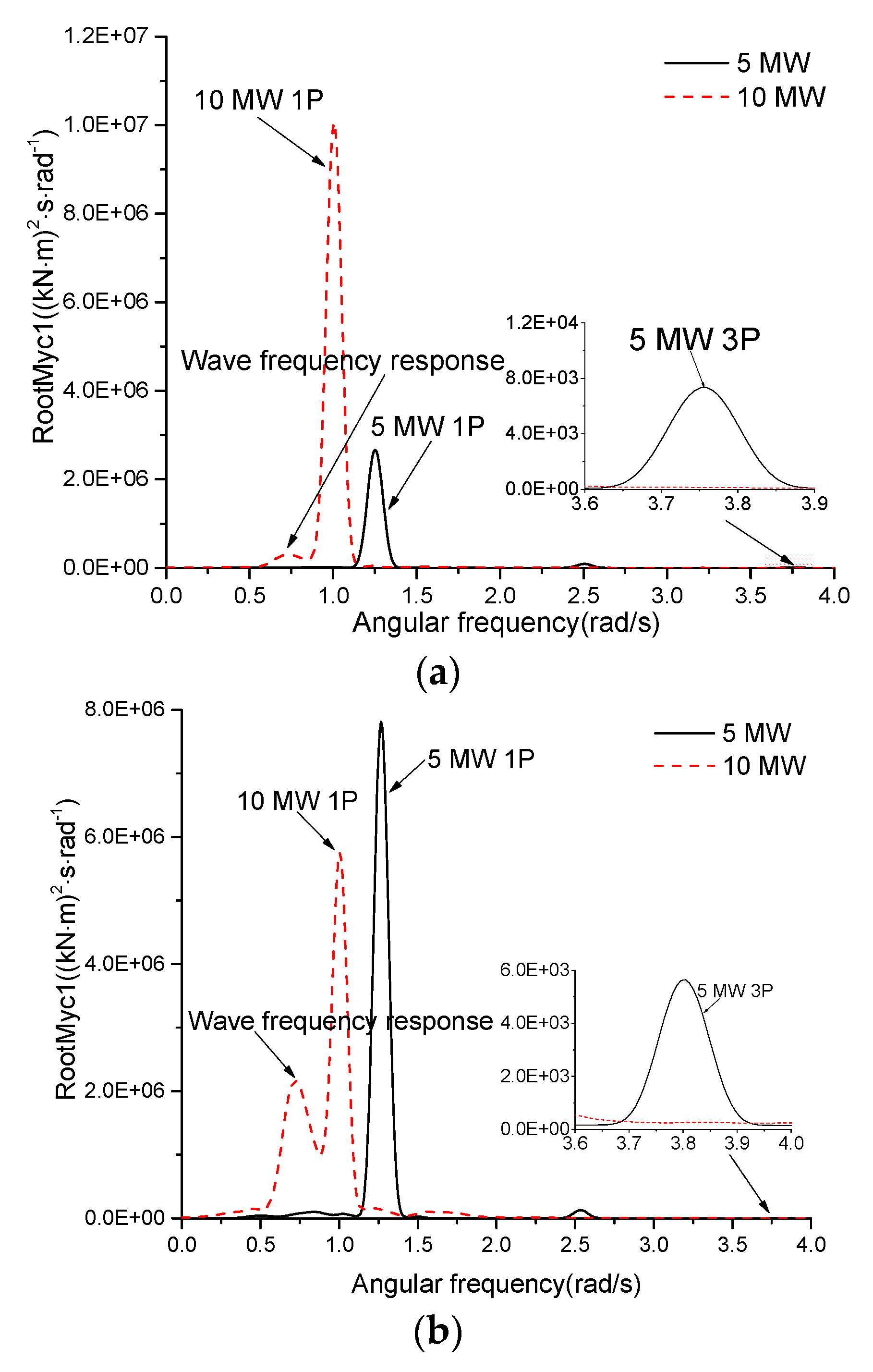
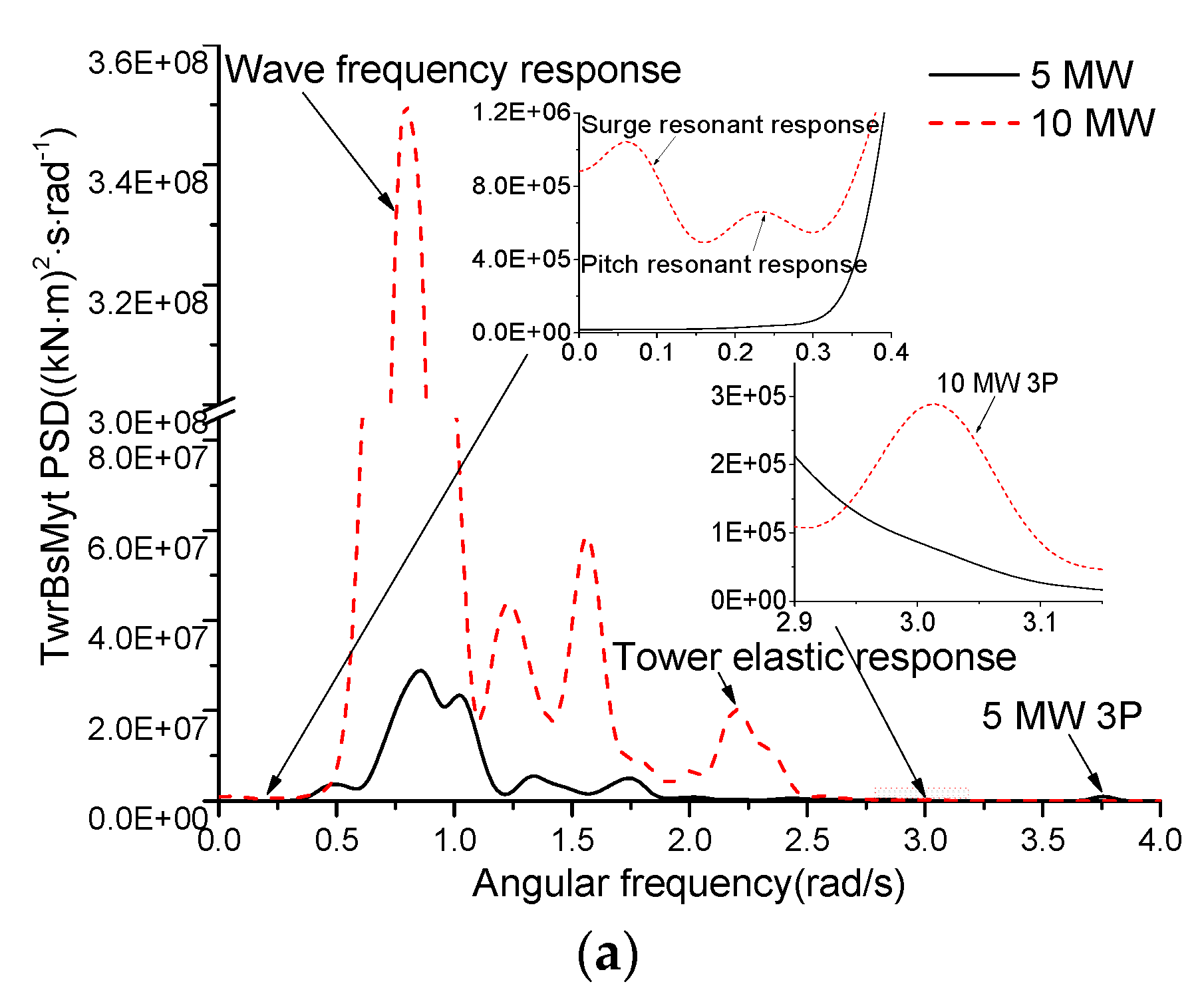
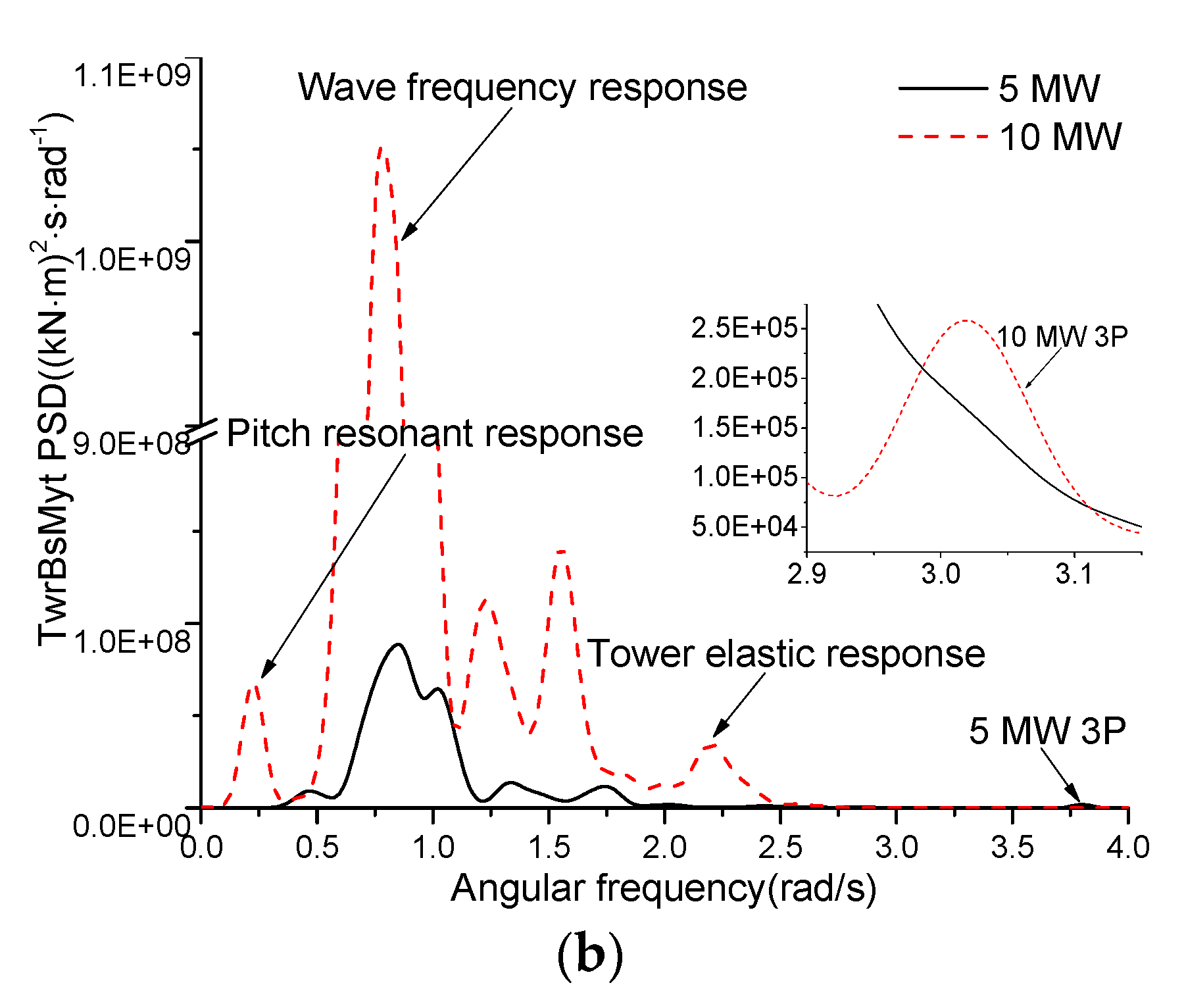
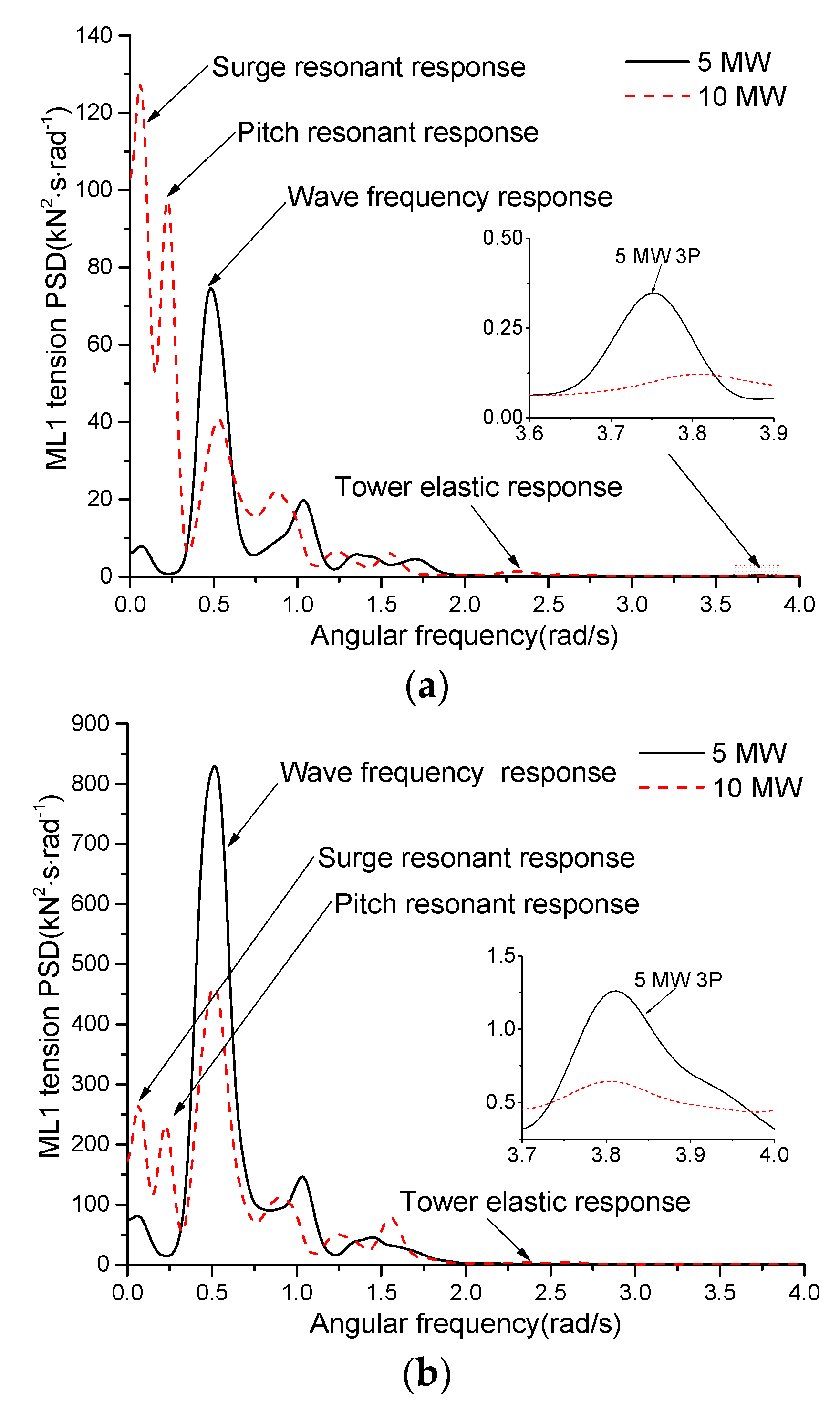
With the increase in the turbine size, the integrated motion responses and structural dynamics were significantly increased, but the integrated motion responses were in a reasonable range. This showed the initial design of the support platform for the DTU 10 MW wind turbine by upscaling of the existing 5 MW platform design is feasible. Correspondingly, the dynamic behaviors between the motion responses and structural dynamics of the 5 and 10 MW FOWTs were significantly different. It can be seen that the low-frequency excitations of the wind loads on the surge and pitch motions, the tower-base fore-aft bending moments and the mooring line tension responses of the 10 MW FOWT were more prominent than those of the 5 MW FOWT, but the 3P effect on the structural dynamics of the 5 MW FOWT was significant.
In general, the studies conducted herein provided prominence to the feasibility of the application of a braceless semi-submersible platform to hold the DTU 10 MW reference wind turbine for specific environmental conditions. This provides a reference for the design and application of the ultra-large FOWT in the future. However, if the braceless semi-submersible platform is used to support the ultra-large wind turbines in practice, more design requirements such as the adjustment of size and layout, detailed strength checks for fatigue and ultimate limit states, hydrodynamic performance and economic analysis, and a long-term extreme analysis should be conducted in further study.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}