Performance Analysis of Conical Permanent Magnet Couplings for Underwater Propulsion


Abstract
:1. Introduction
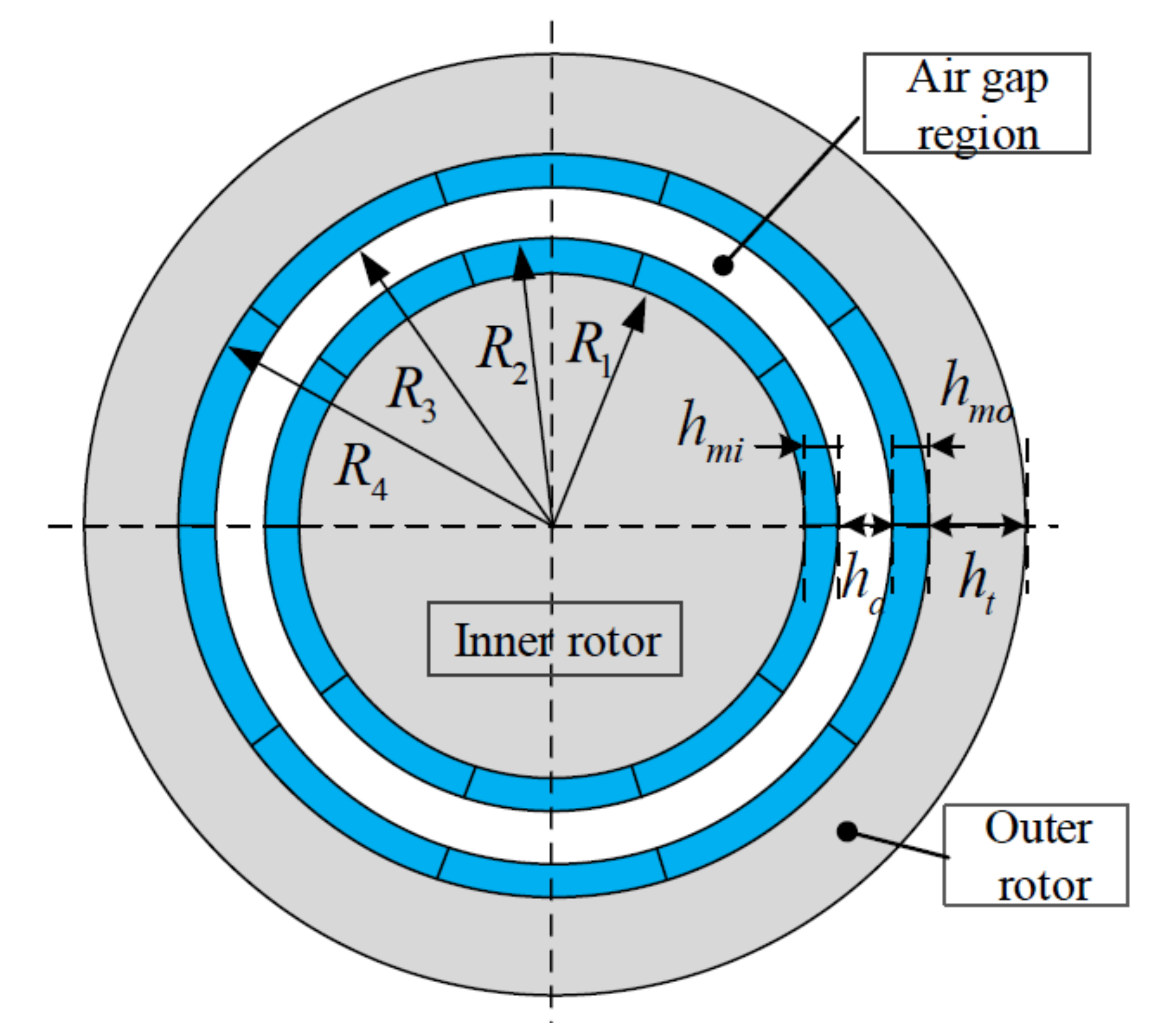
2. Configuration of the CPMC
3. Performance Analysis of Proposed CPMC
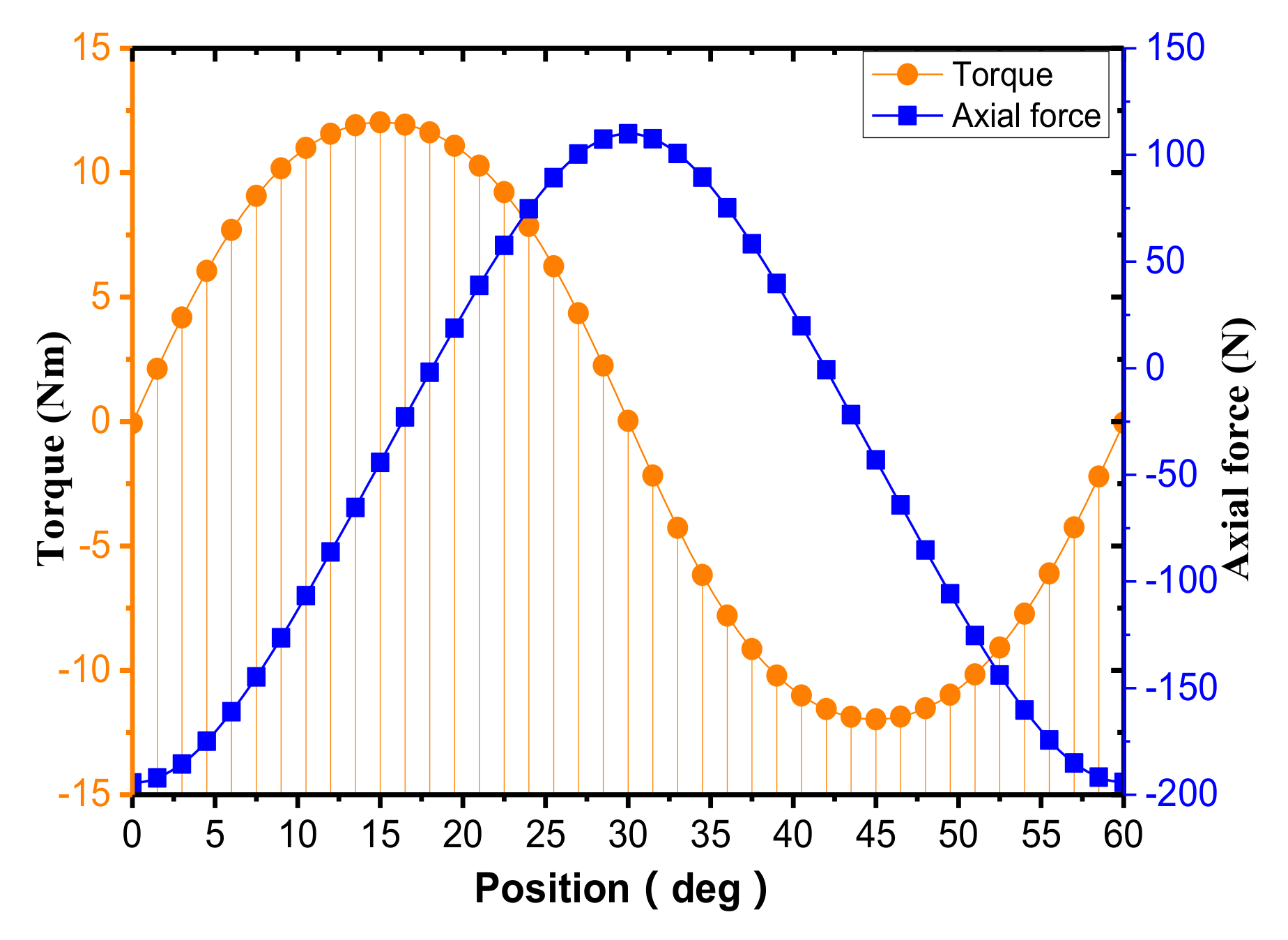
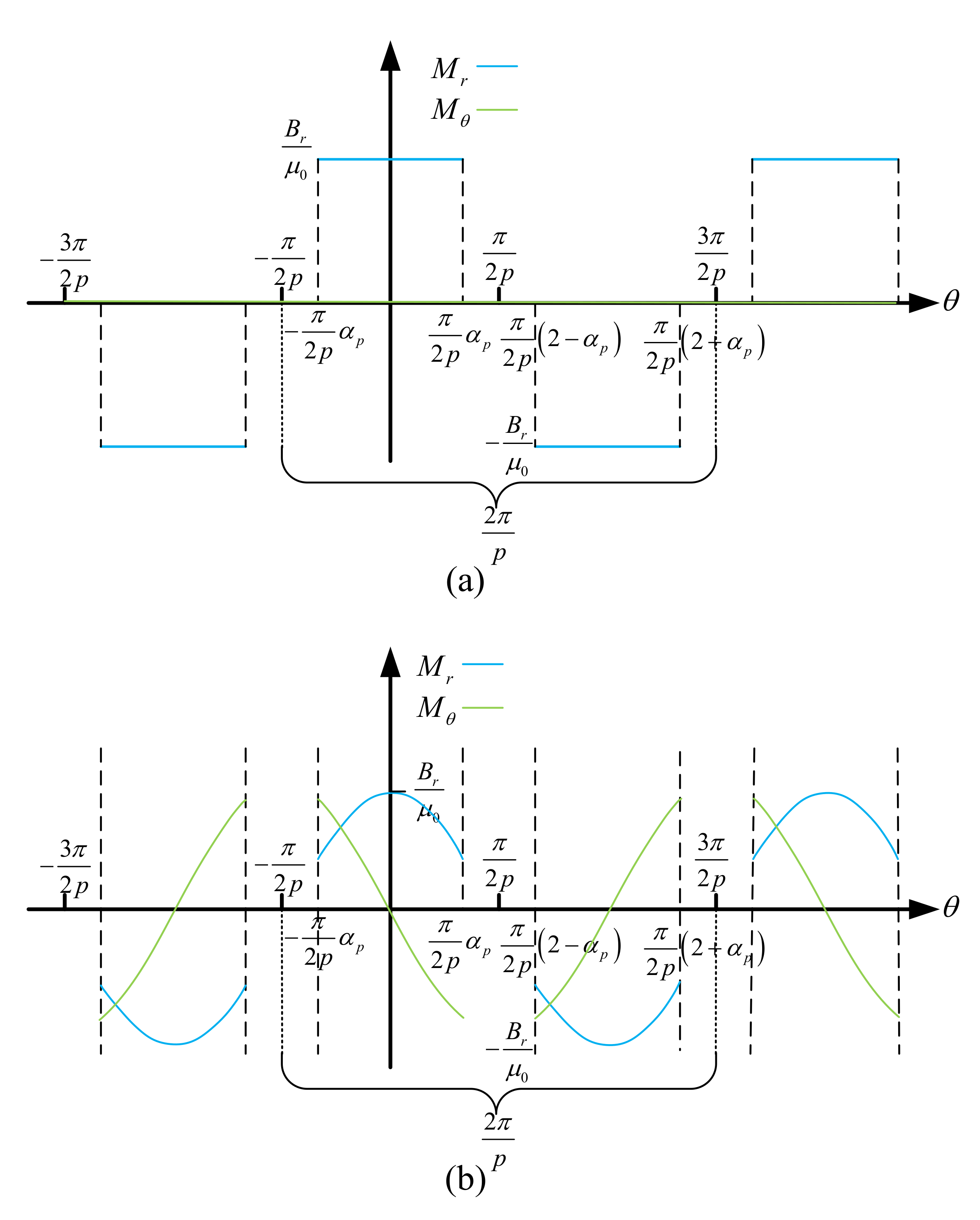
3.1. Electromagnetic Characteristics of CPMC
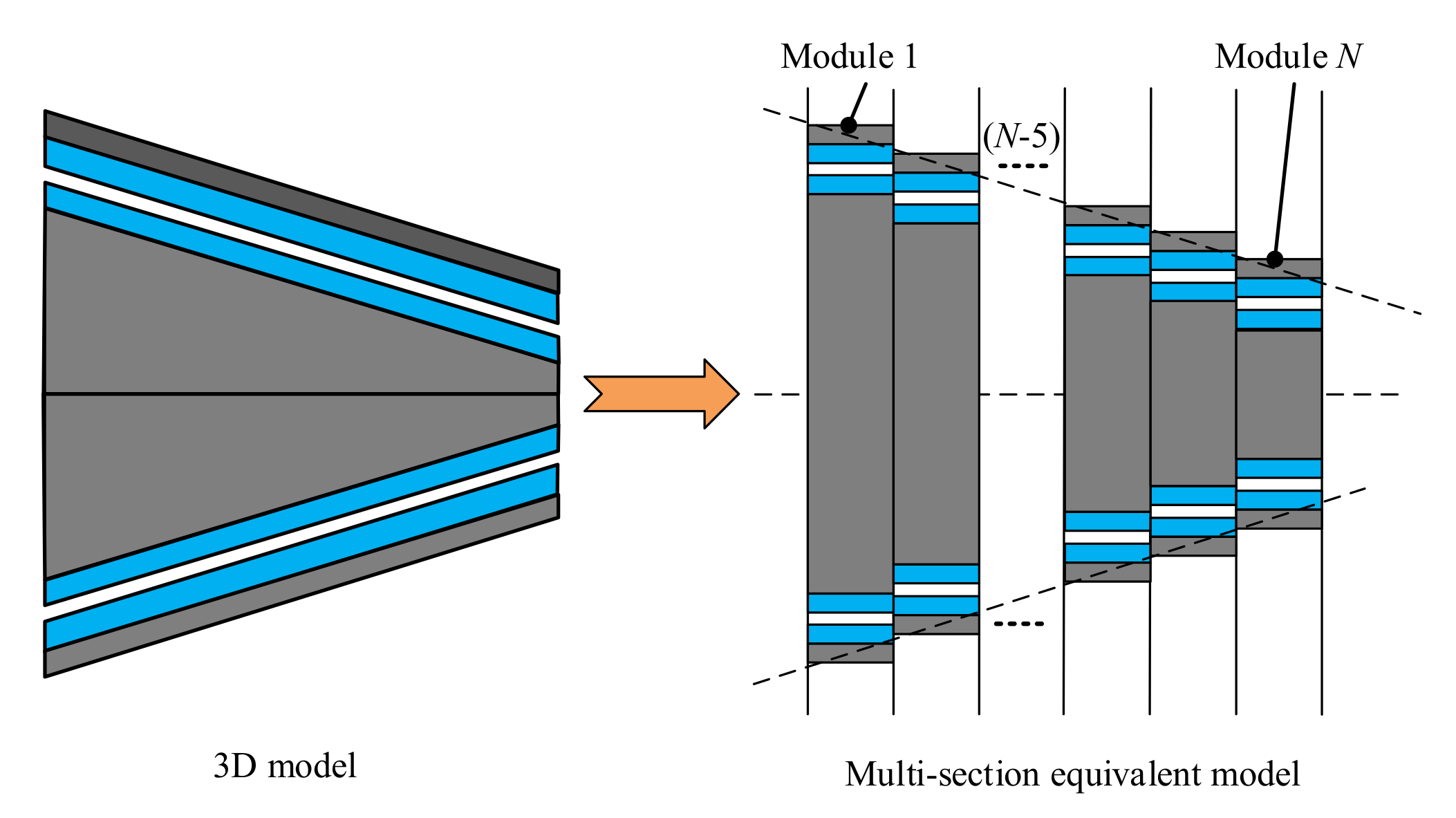
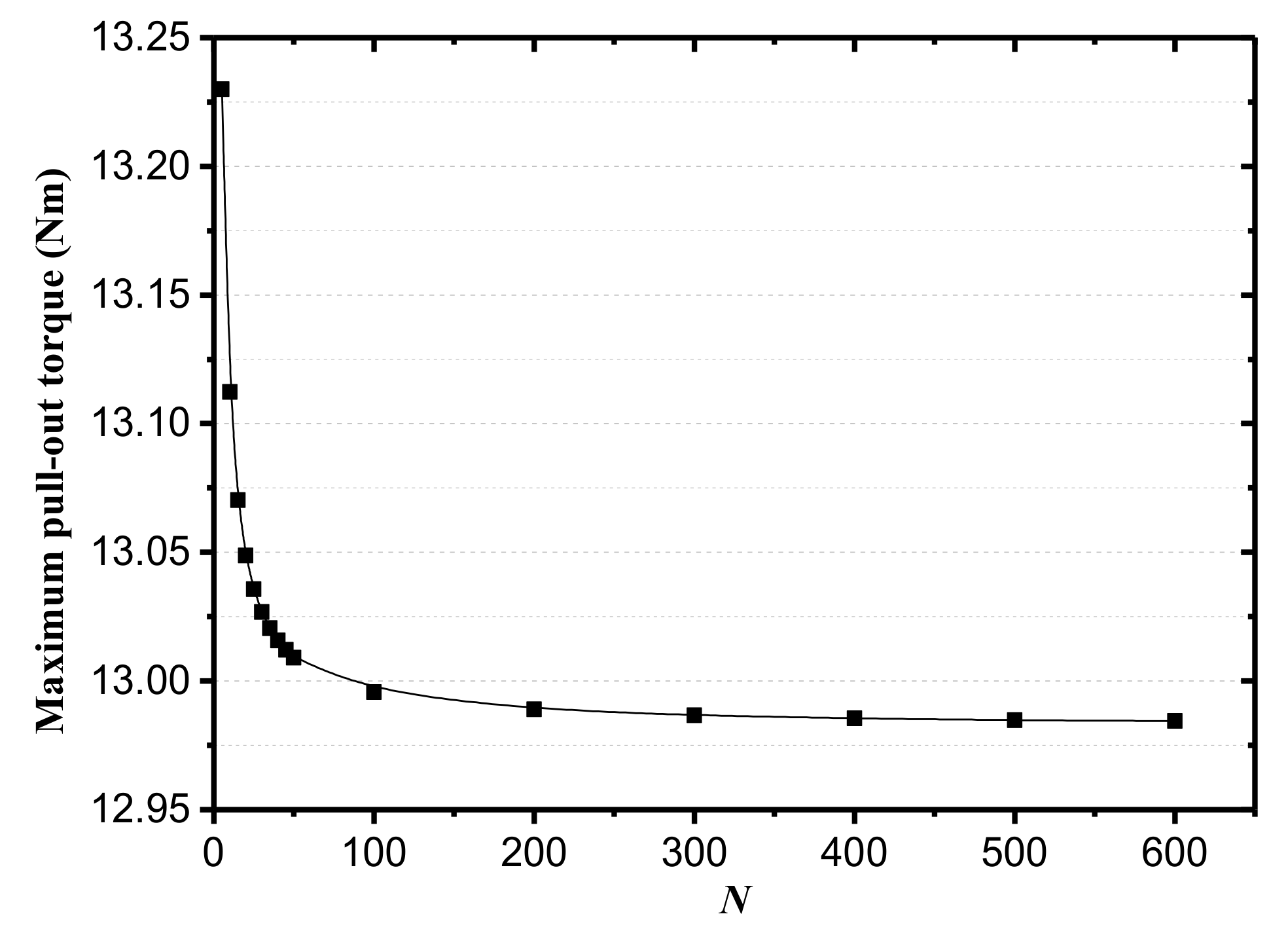
3.2. Equivalent Three-Dimensional Analytical Method
3.2.1. Model Assumptions
- The permanent magnet is uniformly magnetized.
- The yoke material (steel 10) is infinite permeable (), and no magnetization saturation occurred.
- End-effect and magnetic flux leakage are neglected.
- Ignoring the influence of isolation shell.
- The permeability of all materials is assumed to be isotropic and homogenous.
3.2.2. Equivalent Model
3.2.3. Torque Calculation
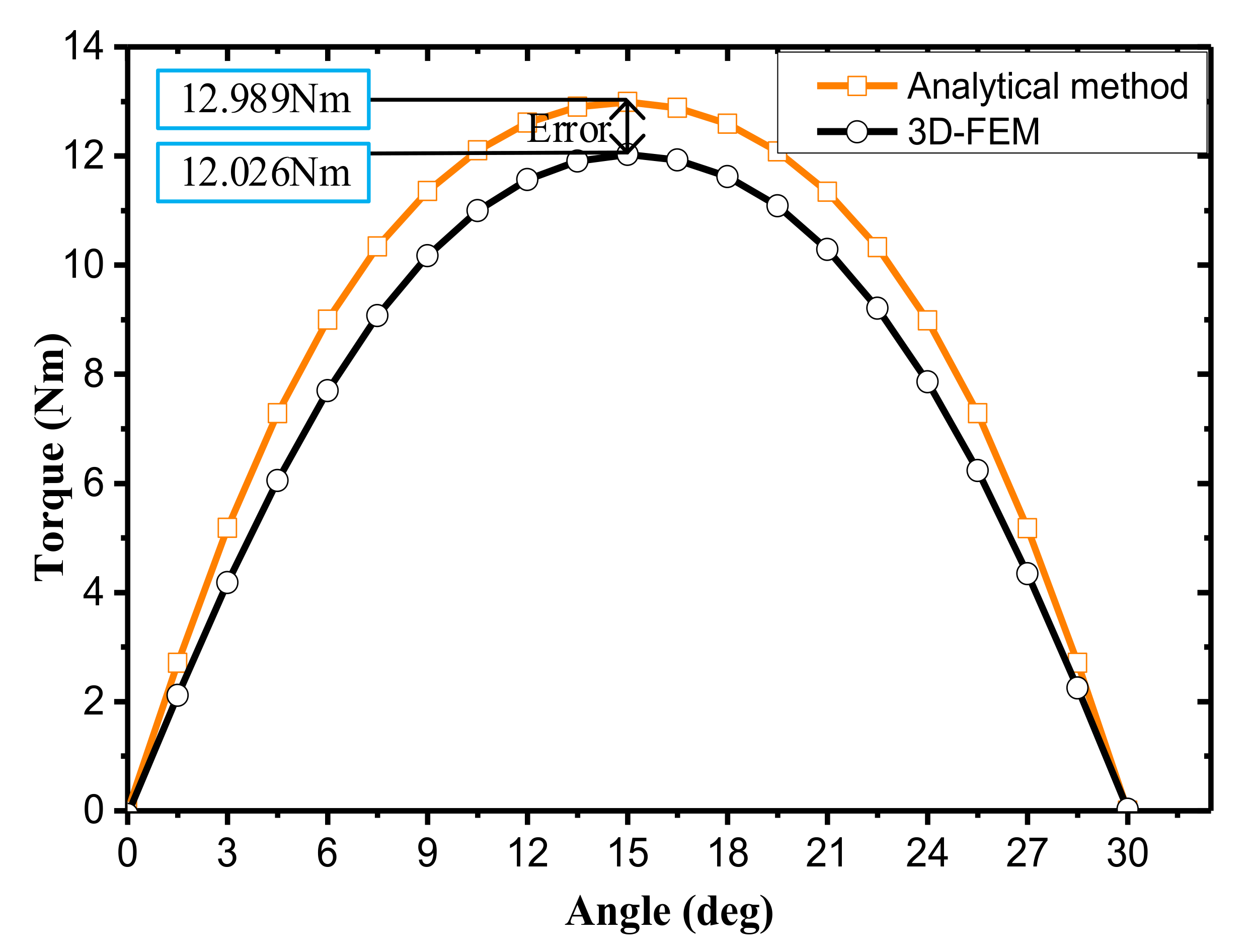
3.2.4. Comparison with 3D-FEM
4. Design Consideration and Optimization
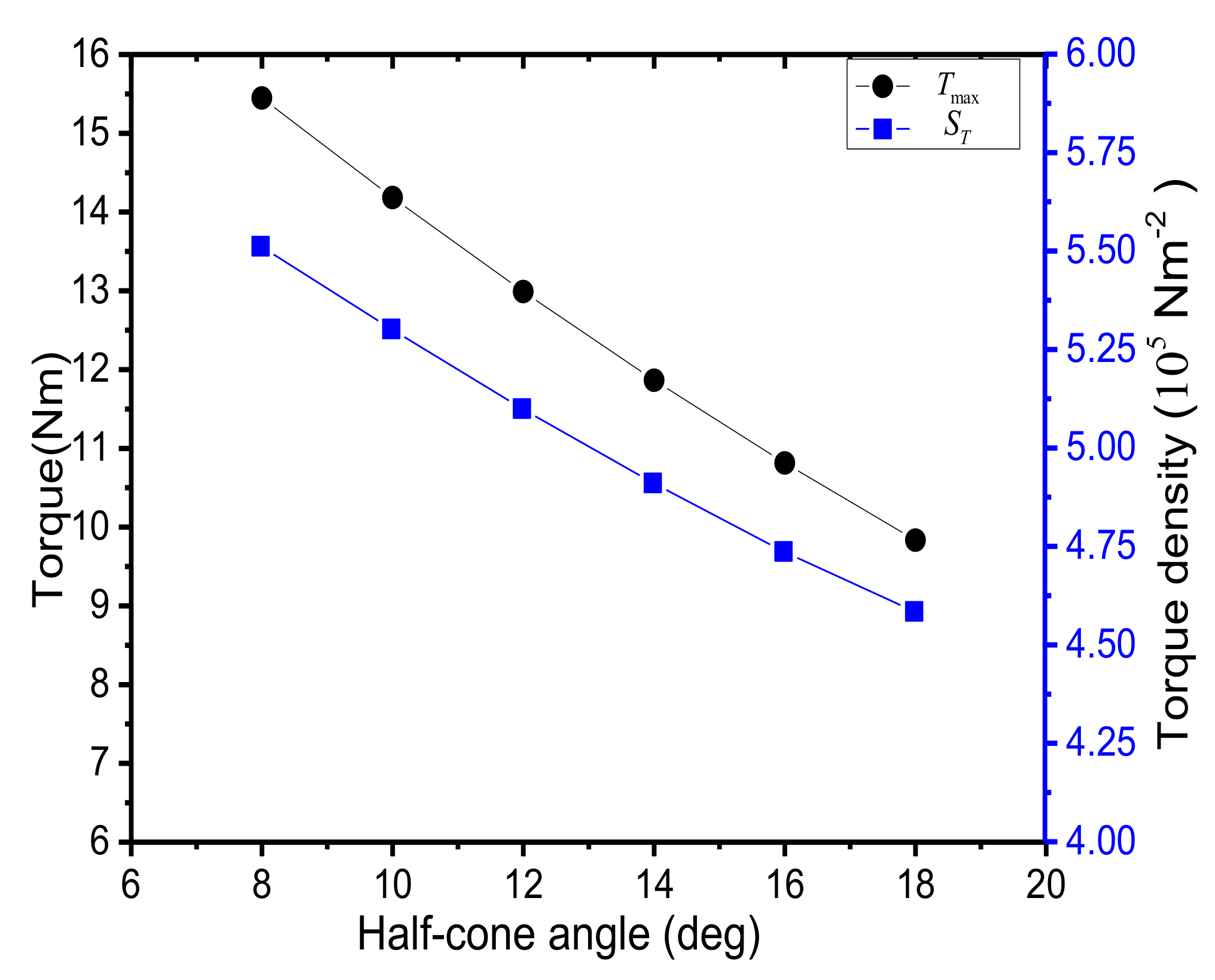
4.1. Influence of Half-Cone Angle
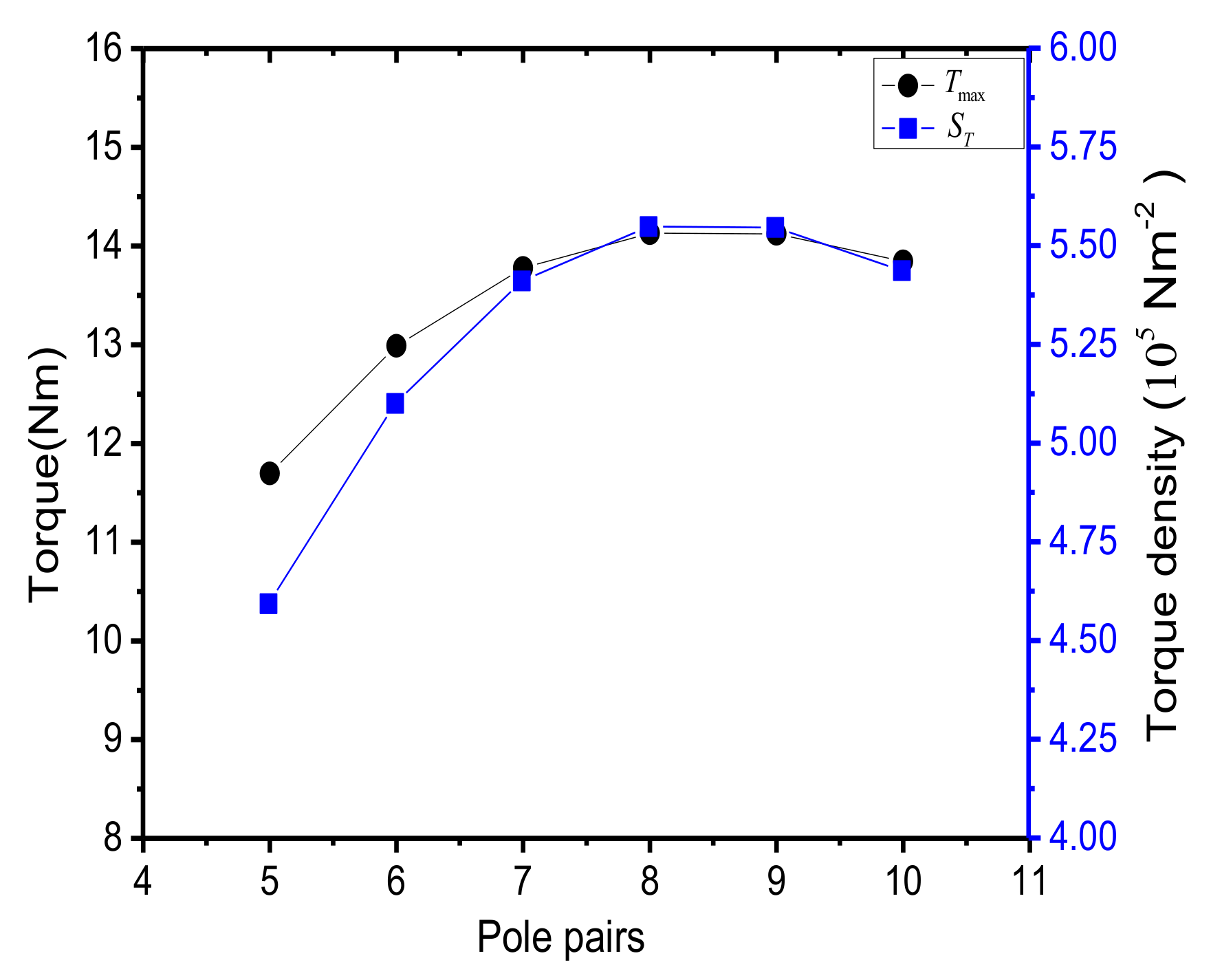
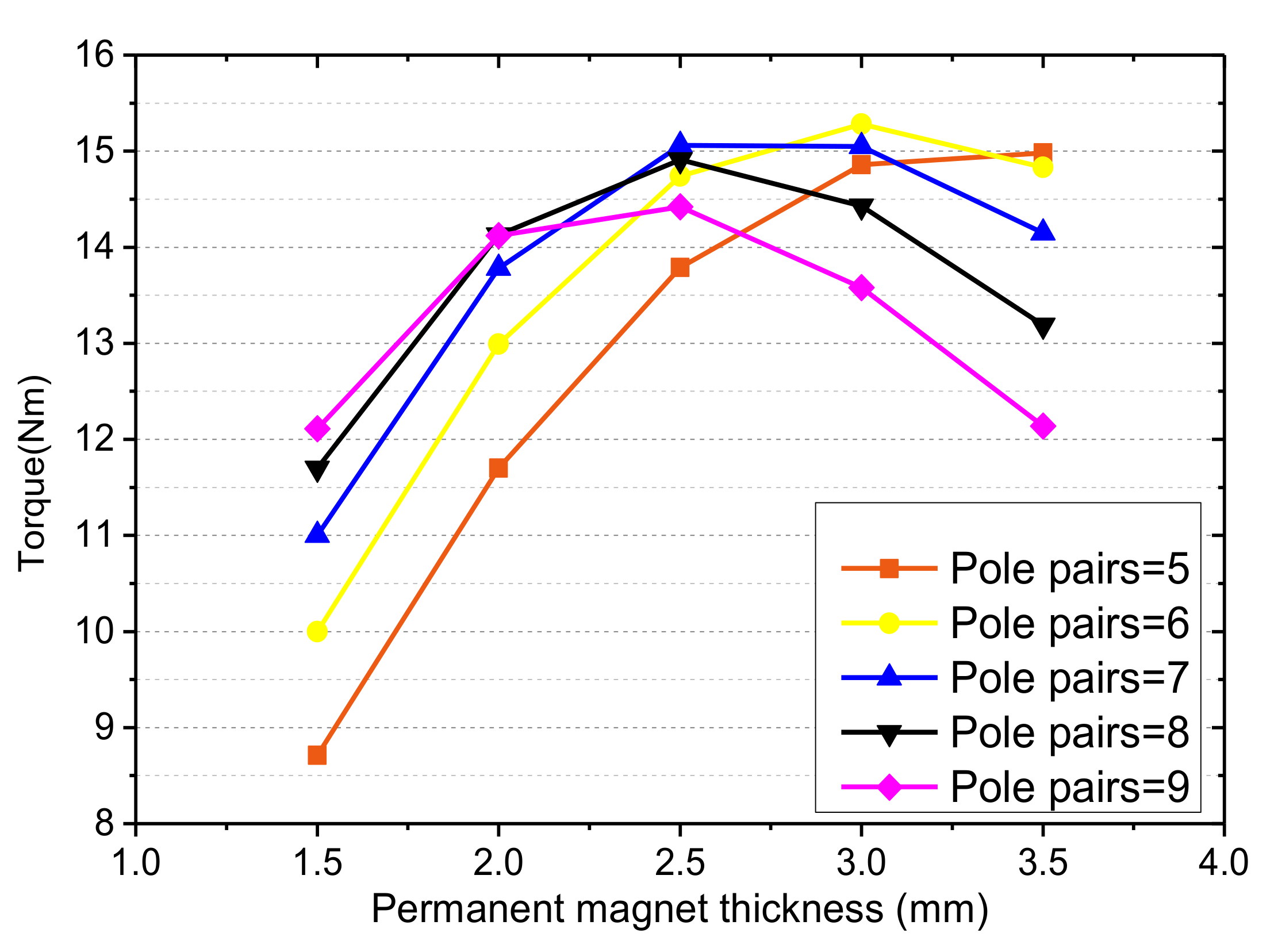
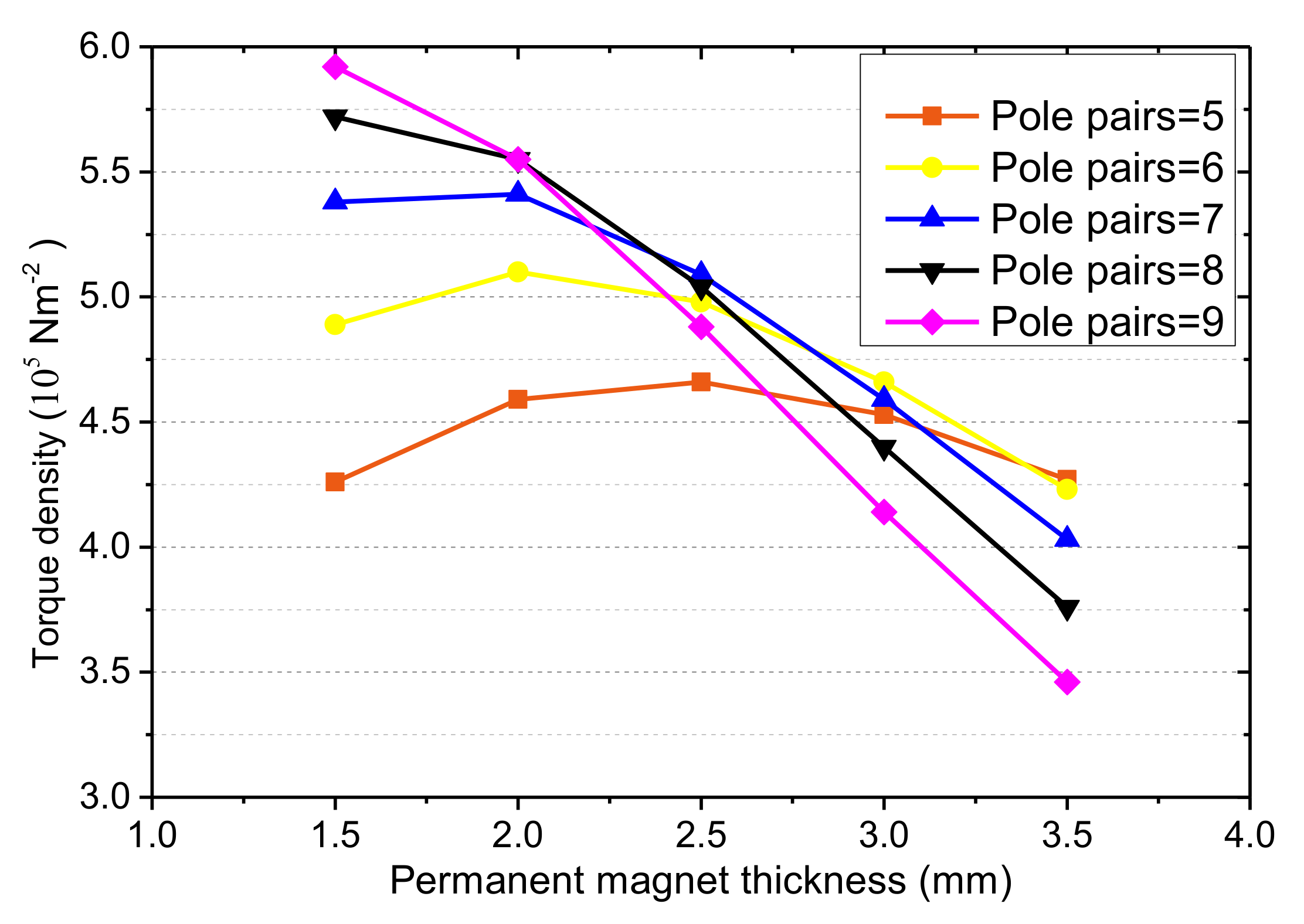
4.2. Influence of Pole Pairs
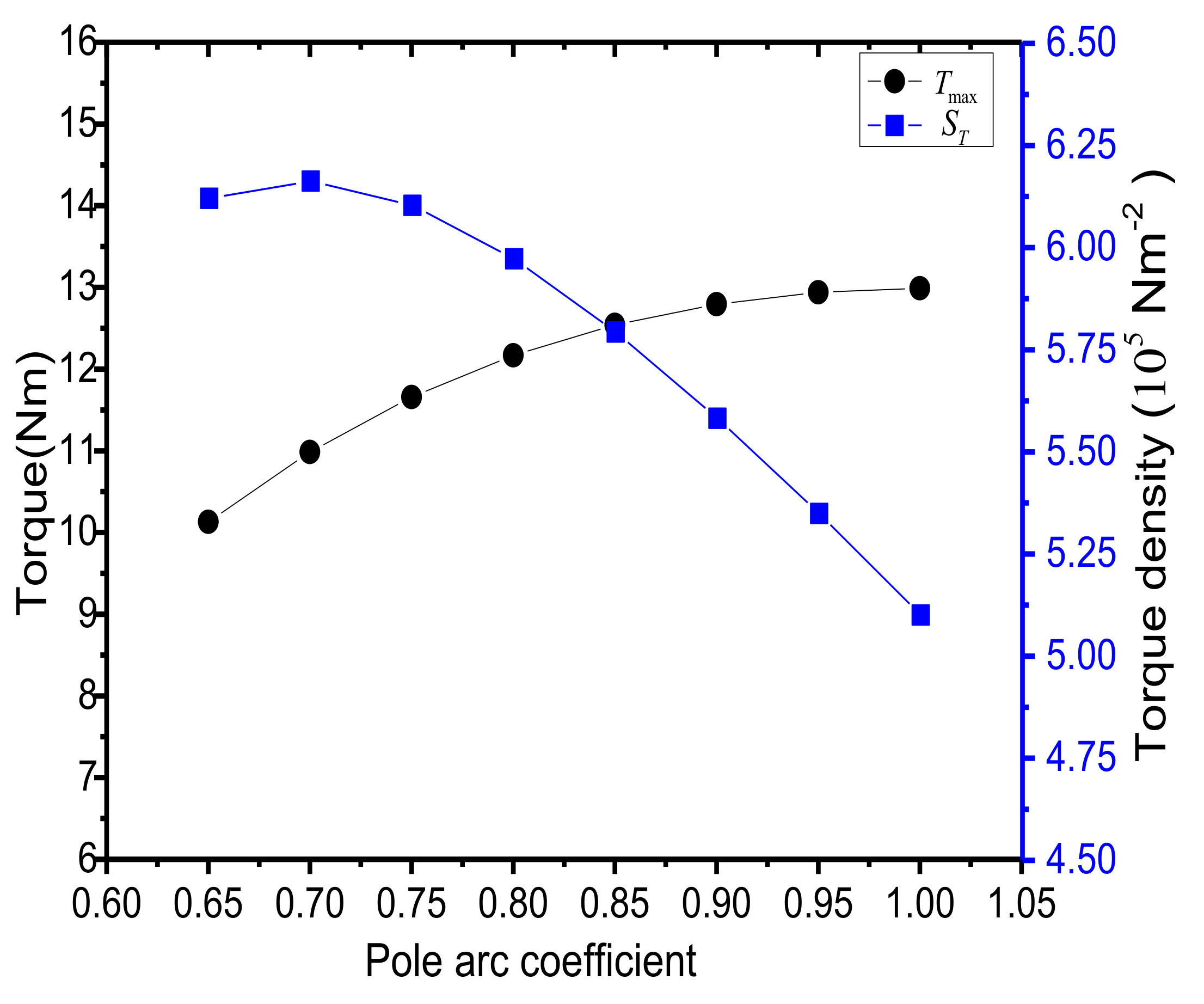
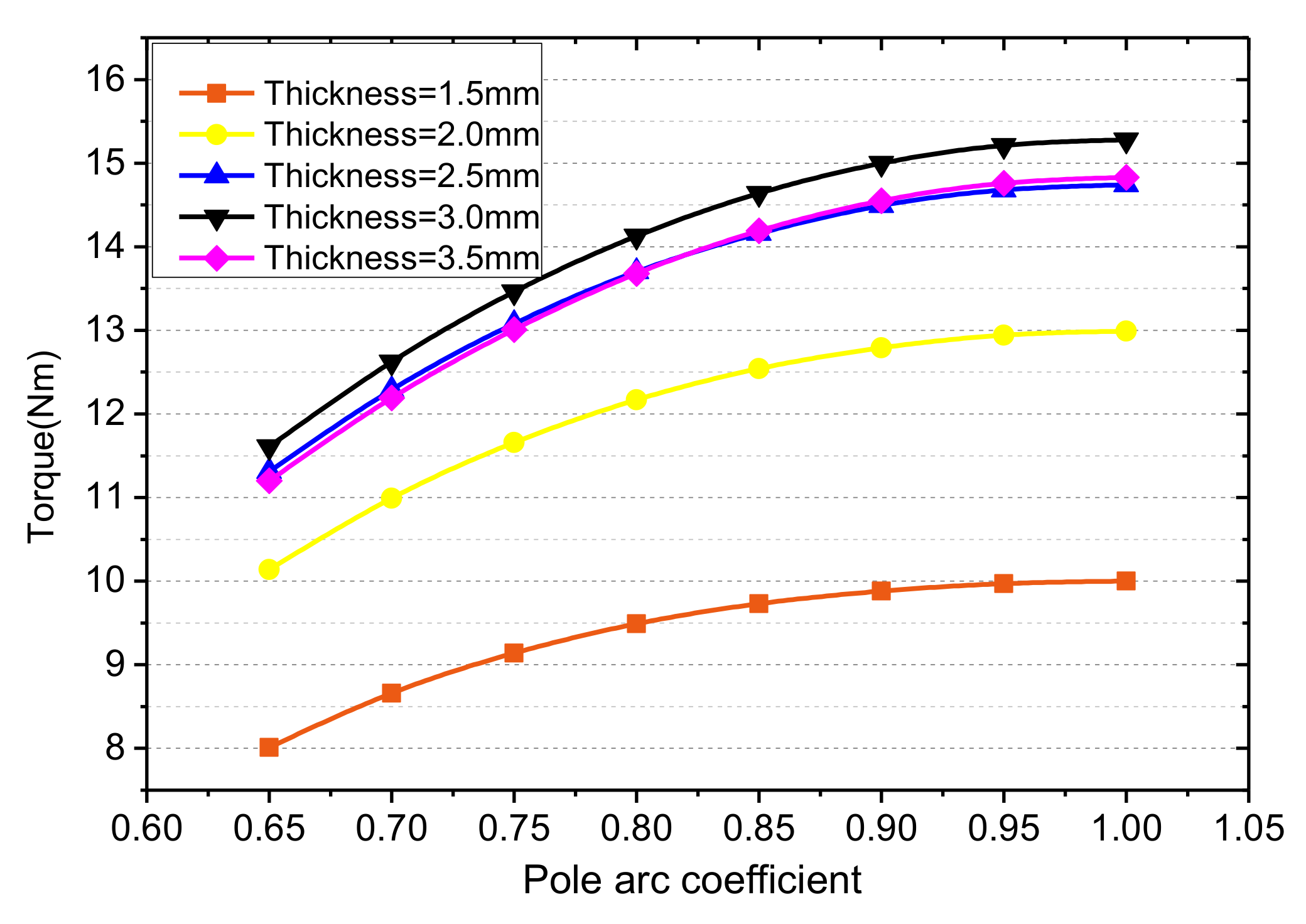
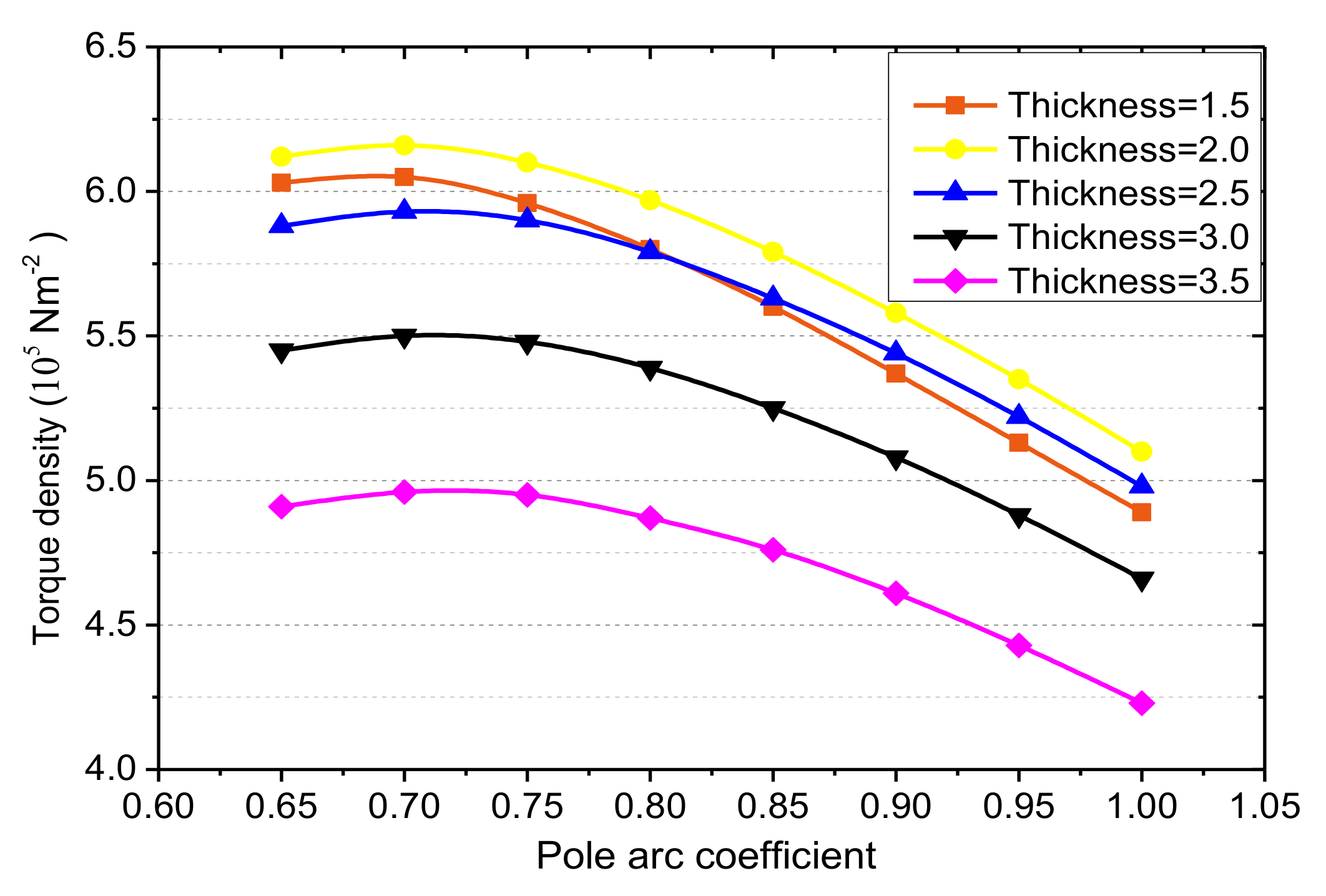
4.3. Influence of Pole Arc Coefficient
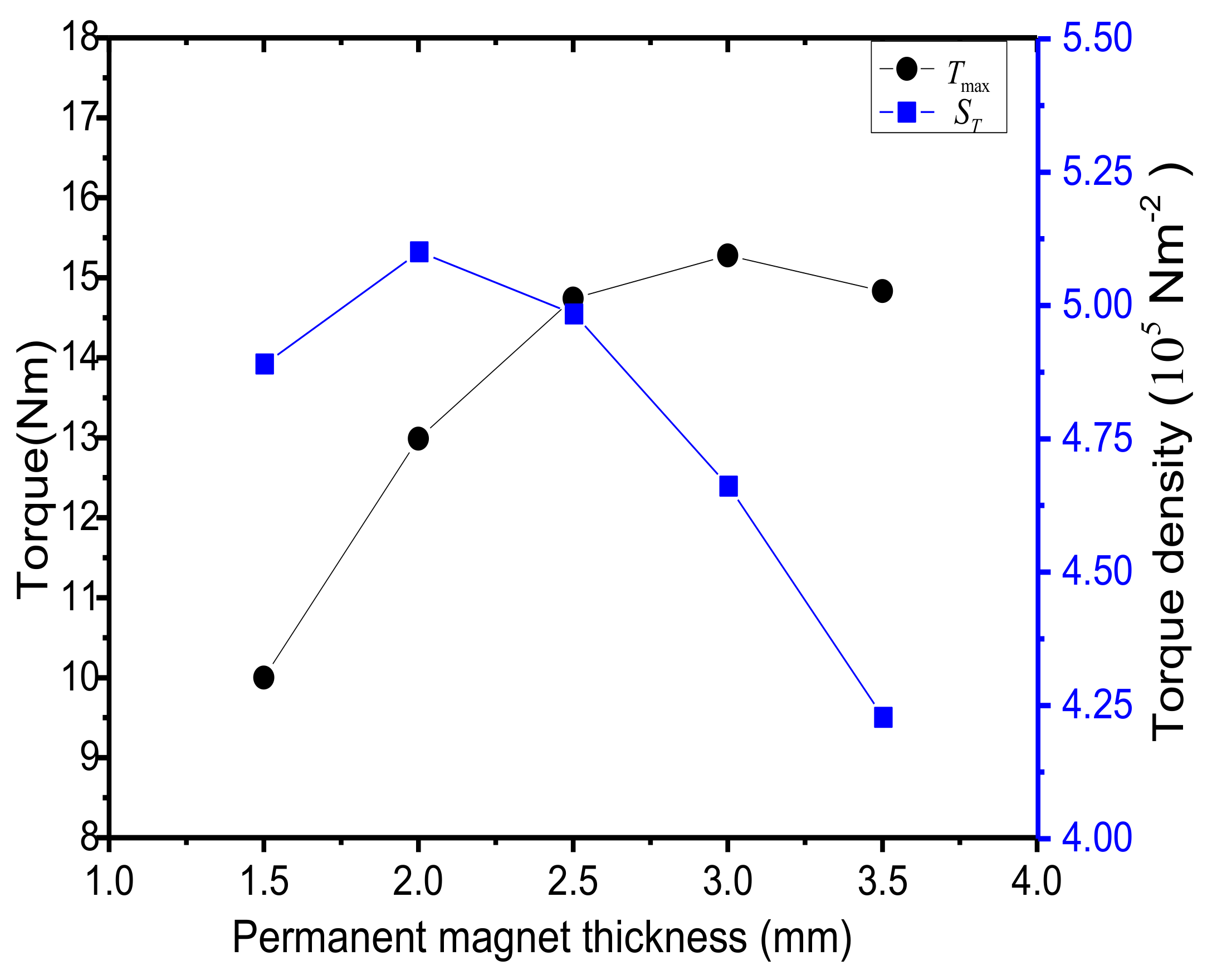
4.4. Influence of Permanent Magnet Thickness
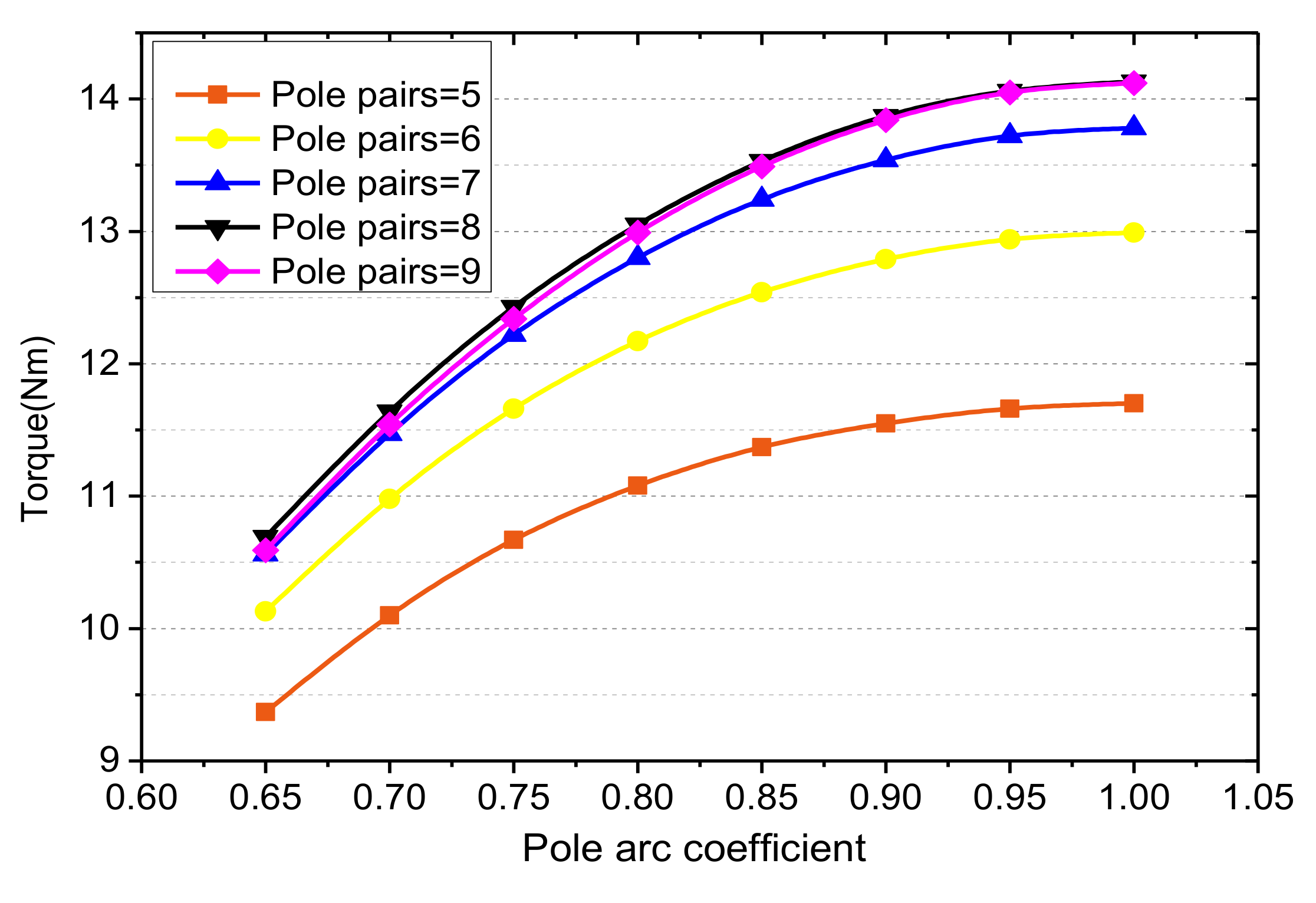
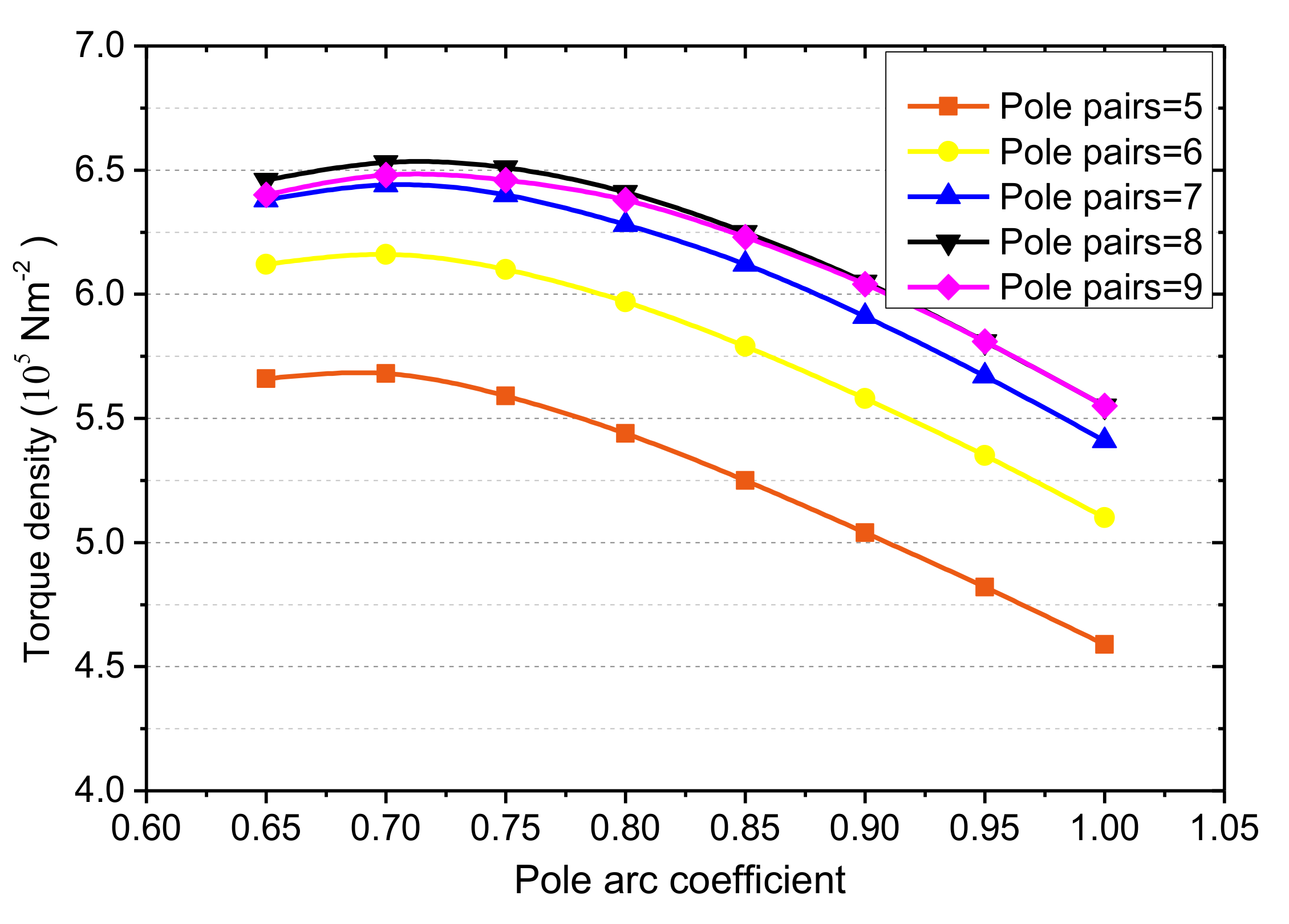
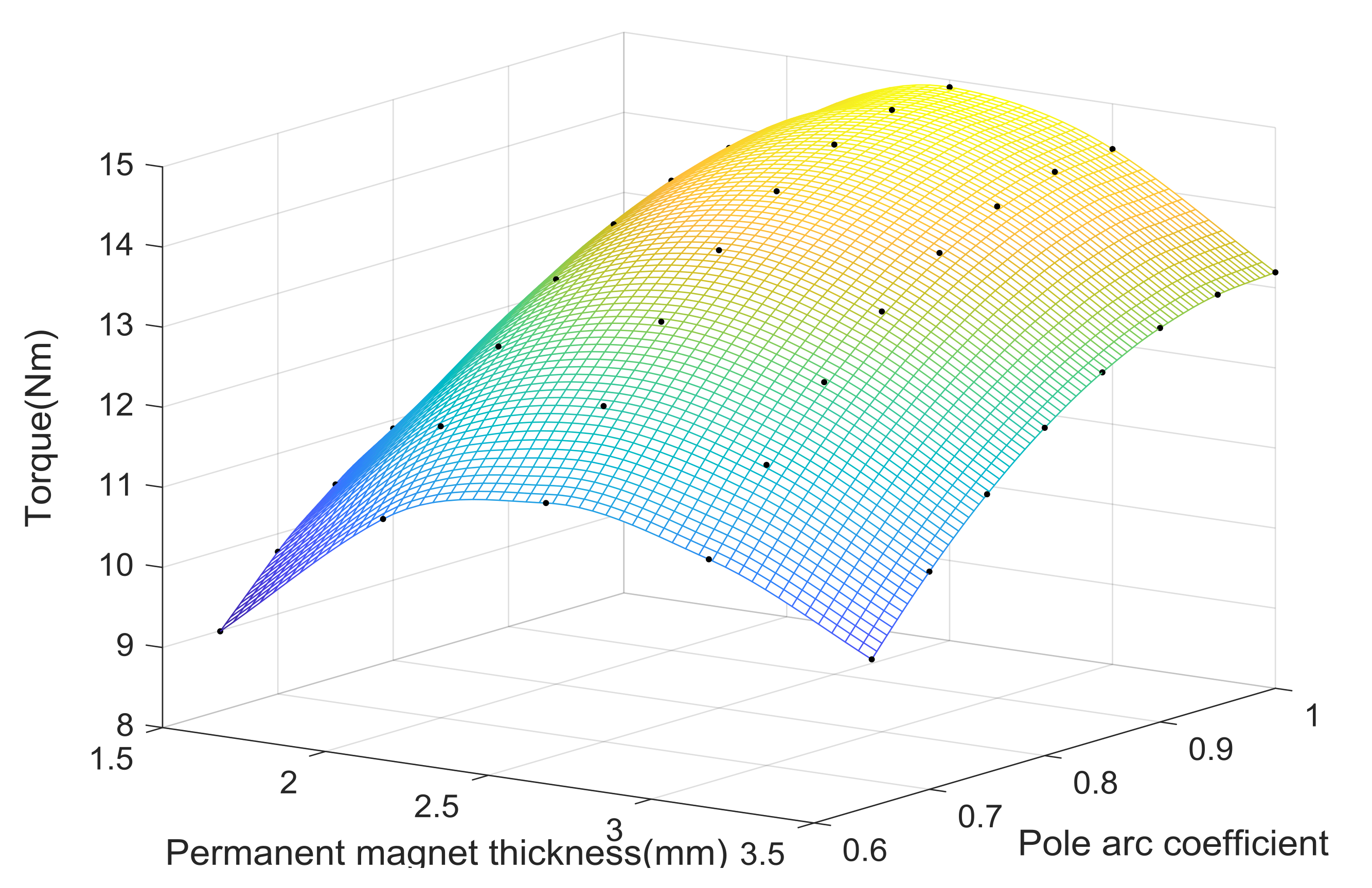
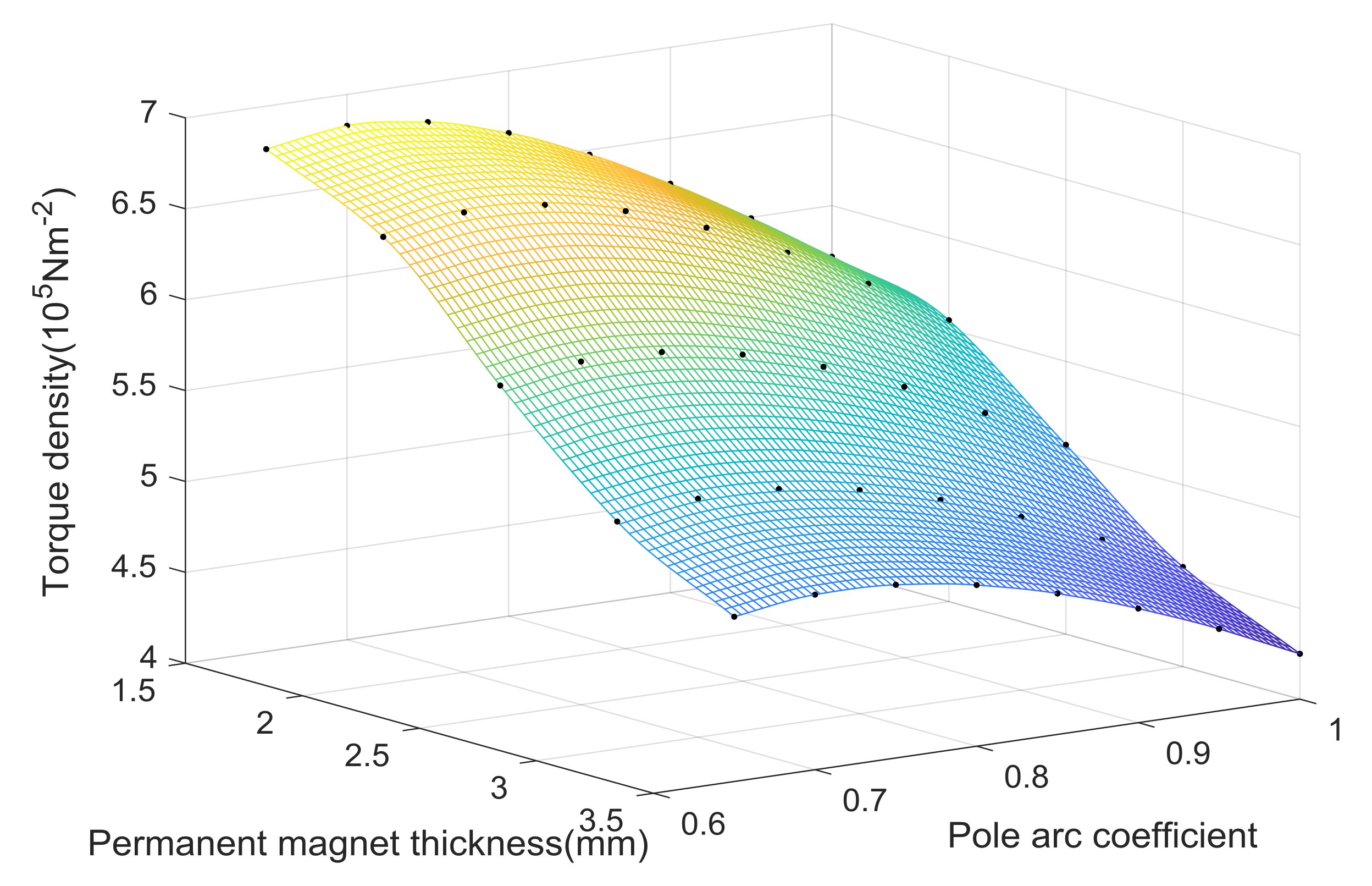
4.5. Interaction Between the Pole Pair, Pole Arc Coefficient and Permanent Magnet Thickness
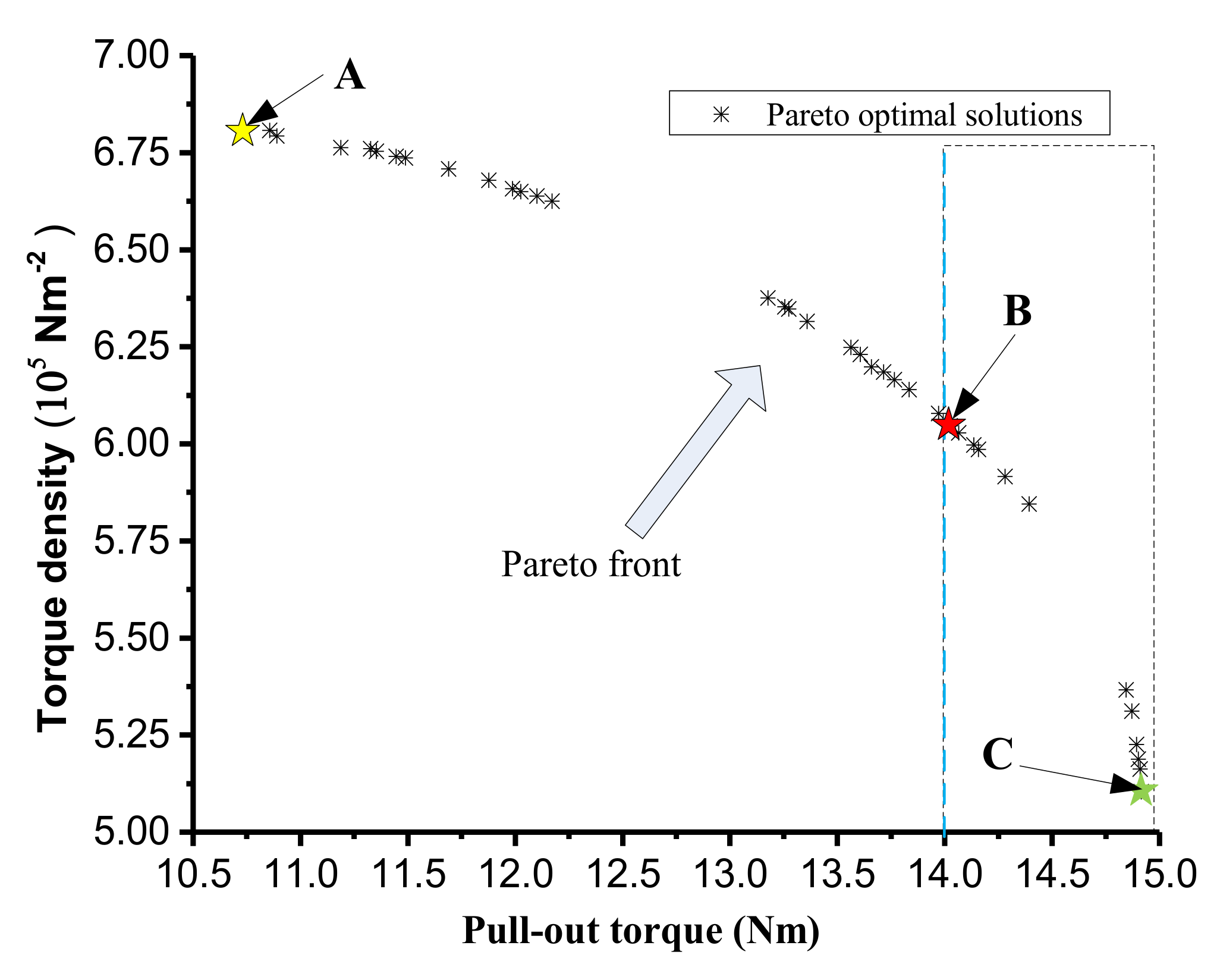
4.6. Preliminary Optimization Design
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.H.; Nie, S.L.; Zhang, L.M.; Yuan, S.H. Development of seawater hydraulic pump tester in deep-sea simulated environment. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics, Harbin, China, 5–7 August 2015; pp. 667–671. [Google Scholar]
- Byron, J.; Tyce, R. Designing a vertical/horizontal AUV for deep ocean sampling. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–10. [Google Scholar]
- Fletcher, B. UUV master plan: A vision for navy UUV development. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; pp. 65–71. [Google Scholar]
- Zhang, B.S.; Song, B.W.; Mao, Z.Y.; Jiang, J.; Sun, C.Y. Hydrodynamic characteristics and stability simulation of four-rotor dish-shaped UUV landing on the seabed. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Provencher, L.; Sarraillon, S. The MASKI+underwater inspection robot: A new generation ahead. In Proceedings of the 2016 4th International Conference on Applied Robotics for the Power Industry (CARPI), Jinan, China, 11–13 October 2016; pp. 1–6. [Google Scholar]
- Charpentier, J.F.; Fadli, N.; Jennane, J. Study of ironless permanent magnet devices being both a coupling and an axial bearing for naval propulsion. IEEE Trans. Magn. 2003, 39, 3235–3237. [Google Scholar] [CrossRef]
- Qi, C.P.; Zhao, J.X.; Zheng, Y.Y. Design of Halbach array magnetic coupling for underwater propeller. Micromotors 2017, 50, 80–83. [Google Scholar]
- Cheng, B.; Pan, G. Analysis and structure optimization of radial Halbach permanent magnet couplings for deep sea robots. Math. Probl. Eng. 2018, 2018, 7627326. [Google Scholar] [CrossRef]
- Yu, Y.L.; Zhao, B. Study on eddy current loss and system transmission efficiency in insulation shell of the under-water permanent magnet shaft coupling. Trans. China Electr. Tech. Soc. 2014, 29, 15–22. [Google Scholar]
- Högberg, S.; Mijatovic, N.; Holbøll, J.; Jensen, B.B.; Bendixen, F.B. Parametric design optimization of a novel permanent magnet coupling using finite element analysis. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014; pp. 1465–1471. [Google Scholar]
- Charpentier, J.F.; Lemarquand, G. Optimal design of cylindrical air-gap synchronous permanent magnet couplings. IEEE Trans. Magn. 1999, 35, 1037–1046. [Google Scholar] [CrossRef]
- Dolisy, B.; Mezani, S.; Lubin, T.; Lévêque, J. A new analytical torque formula for axial field permanent magnets coupling. IEEE Trans. Magn. 2015, 30, 1–8. [Google Scholar] [CrossRef]
- Yuan, D.Q.; Li, J.P.; He, Y.Q.; Zhang, H. Characteristic analysis of transmission torque of magnetic coupling with Halbach array. J. Magn. Mater. Devices 2011, 42, 36–40. [Google Scholar]
- Seo, S.W.; Kim, Y.H.; Lee, J.H.; Choi, J.Y. Analytical torque calculation and experimental verification of synchronous permanent magnet couplings with Halbach arrays. AIP Adv. 2018, 8, 0566091–0566096. [Google Scholar] [CrossRef]
- Ravaud, R.; Remarquand, V.; Remarquand, G. Analytical design of permanent magnet radial couplings. IEEE Trans. Magn. 2010, 46, 3860–3865. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Experimental and theoretical analyses of axial magnetic coupling under steady-state and transient operations. IEEE Trans. Ind. Electron. 2014, 61, 4356–4365. [Google Scholar] [CrossRef]
- Choi, J.Y.; Shin, H.J.; Jang, S.M.; Lee, S.H. Torque analysis and measurements of cylindrical air-gap synchronous permanent magnet couplings based on analytical magnetic field calculations. IEEE Trans. Magn. 2013, 49, 3921–3924. [Google Scholar] [CrossRef]
- Zhu, Z.N.; Meng, Z. 3D torque calculation of magnetic coupling and its characteristic parameters analysis. Electr. Mach. Control 2017, 21, 94–101. [Google Scholar]
- Gyselinck, J.J.C.; Vandevelde, L.; Melkebeek, J.A.A. Multi-slice FE modeling of electrical machines with skewed slots-the skew discretization error. IEEE Trans. Magn. 2001, 37, 3233–3237. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Romeral, L.; Garcia, A. A simple 2-D finite-element geometry for analyzing surface-mounted synchronous machines with skewed rotor magnets. IEEE Trans. Magn. 2010, 46, 3948–3954. [Google Scholar] [CrossRef]
- Hong, C.; Huang, W.; Hu, Z. Performance calculation of a dual stator solid rotor axial flux induction motor using the multi-slice and multi-layer method. IEEE Trans. Magn. 2019, 55, 1–9. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D.; Chan, C.C. Improved analytical model for predicting the magnetic field distribution in brushless permanent-magnet machines. IEEE Trans. Magn. 2002, 38, 229–238. [Google Scholar] [CrossRef] [Green Version]
- Vo-Duy, T.; Duong-Gia, D.; Ho-Huu, V.; Vu-Do, H.C.; Nguyen-Thoi, T. Multi-objective optimization of laminated composite beam structures using NSGA-II algorithm. Compos. Struct. 2017, 168, 498–509. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | Value |
|---|---|
| Front end diameter | 60 mm |
| Axial length | 55 mm |
| Half-cone angle | 12° |
| Outer rotor yoke thickness | 3 mm |
| Outer permanent magnet thickness | 2 mm |
| Air gap length | 2 mm |
| Inner permanent magnet thickness | 2 mm |
| Pole pairs | 6 |
| Pole arc coefficient | 1 |
(Unit: Nm) | ||||||
|---|---|---|---|---|---|---|
| 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | ||
| 0.65 | 8.992 | 10.692 | 11.189 | 10.784 | 9.832 | |
| 0.70 | 9.775 | 11.640 | 12.190 | 11.753 | 10.718 | |
| 0.75 | 10.405 | 12.426 | 13.032 | 12.576 | 11.474 | |
| 0.80 | 10.894 | 13.054 | 13.715 | 13.247 | 12.093 | |
| 0.85 | 11.256 | 13.531 | 14.241 | 13.768 | 12.579 | |
| 0.90 | 11.504 | 13.865 | 14.613 | 14.139 | 12.919 | |
| 0.95 | 11.649 | 14.063 | 14.835 | 14.361 | 13.125 | |
| 1.0 | 11.696 | 14.129 | 14.909 | 14.434 | 13.193 | |
| 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | ||
|---|---|---|---|---|---|---|
| 0.65 | 6.764 | 6.459 | 5.821 | 5.251 | 4.907 | |
| 0.70 | 6.827 | 6.529 | 5.888 | 5.312 | 4.963 | |
| 0.75 | 6.784 | 6.506 | 5.875 | 5.301 | 4.953 | |
| 0.80 | 6.658 | 6.407 | 5.797 | 5.230 | 4.886 | |
| 0.85 | 6.474 | 6.251 | 5.665 | 5.111 | 4.775 | |
| 0.90 | 6.249 | 6.050 | 5.490 | 4.953 | 4.628 | |
| 0.95 | 5.995 | 5.813 | 5.280 | 4.764 | 4.451 | |
| 1.0 | 5.718 | 5.548 | 5.041 | 4.548 | 4.250 | |
| Variable | Value |
|---|---|
| Permanent magnet thickness (mm) | 2.168 |
| Pole arc coefficient | 0.869 |
| (Nm) | 14.136 |
| () | 5.997 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Hu, Y.; Song, B.; Mao, Z.; Tian, W. Performance Analysis of Conical Permanent Magnet Couplings for Underwater Propulsion. J. Mar. Sci. Eng. 2019, 7, 187. https://doi.org/10.3390/jmse7060187
Li Y, Hu Y, Song B, Mao Z, Tian W. Performance Analysis of Conical Permanent Magnet Couplings for Underwater Propulsion. Journal of Marine Science and Engineering. 2019; 7(6):187. https://doi.org/10.3390/jmse7060187
Chicago/Turabian StyleLi, Yukai, Yuli Hu, Baowei Song, Zhaoyong Mao, and Wenlong Tian. 2019. "Performance Analysis of Conical Permanent Magnet Couplings for Underwater Propulsion" Journal of Marine Science and Engineering 7, no. 6: 187. https://doi.org/10.3390/jmse7060187
APA StyleLi, Y., Hu, Y., Song, B., Mao, Z., & Tian, W. (2019). Performance Analysis of Conical Permanent Magnet Couplings for Underwater Propulsion. Journal of Marine Science and Engineering, 7(6), 187. https://doi.org/10.3390/jmse7060187