Hydrodynamic Performance of Rectangular Heaving Buoys for an Integrated Floating Breakwater



Abstract
:1. Introduction
2. Numerical Model Set-Up
2.1. Basic Governing Equations
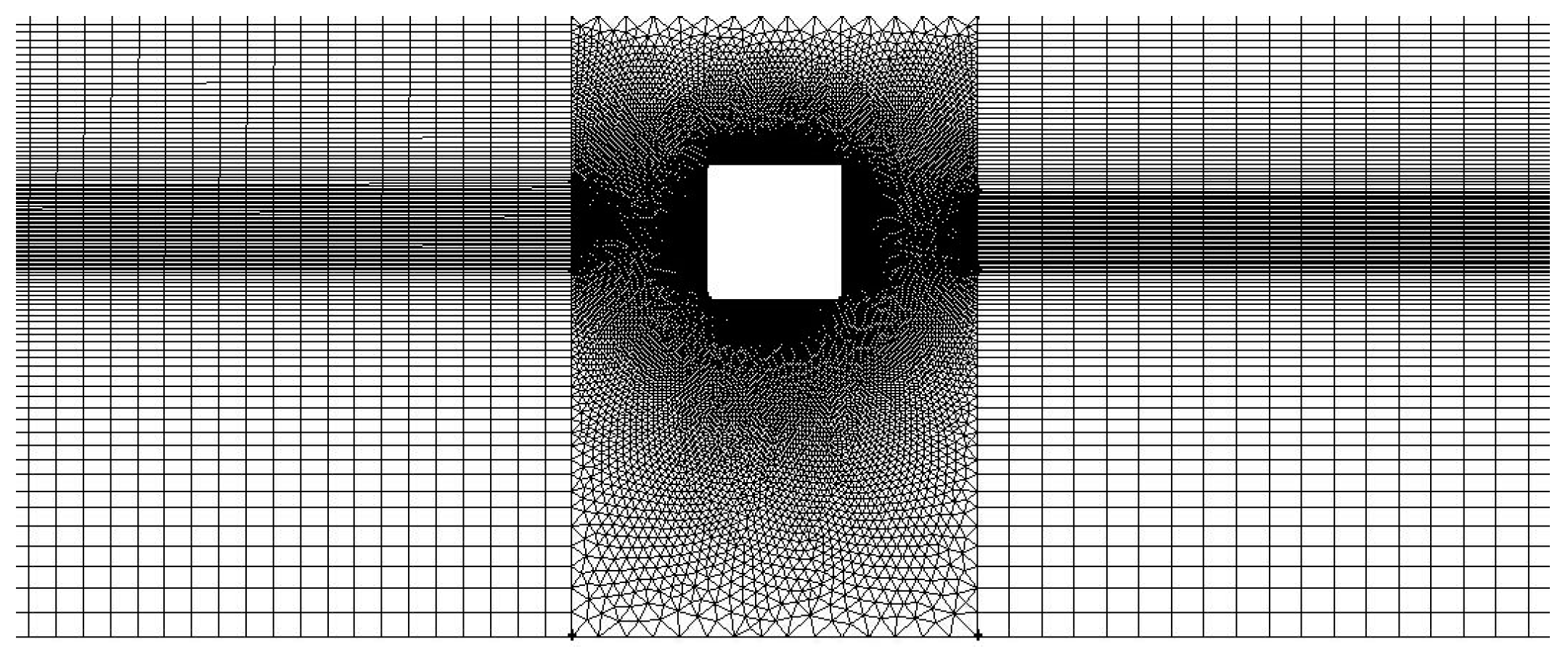
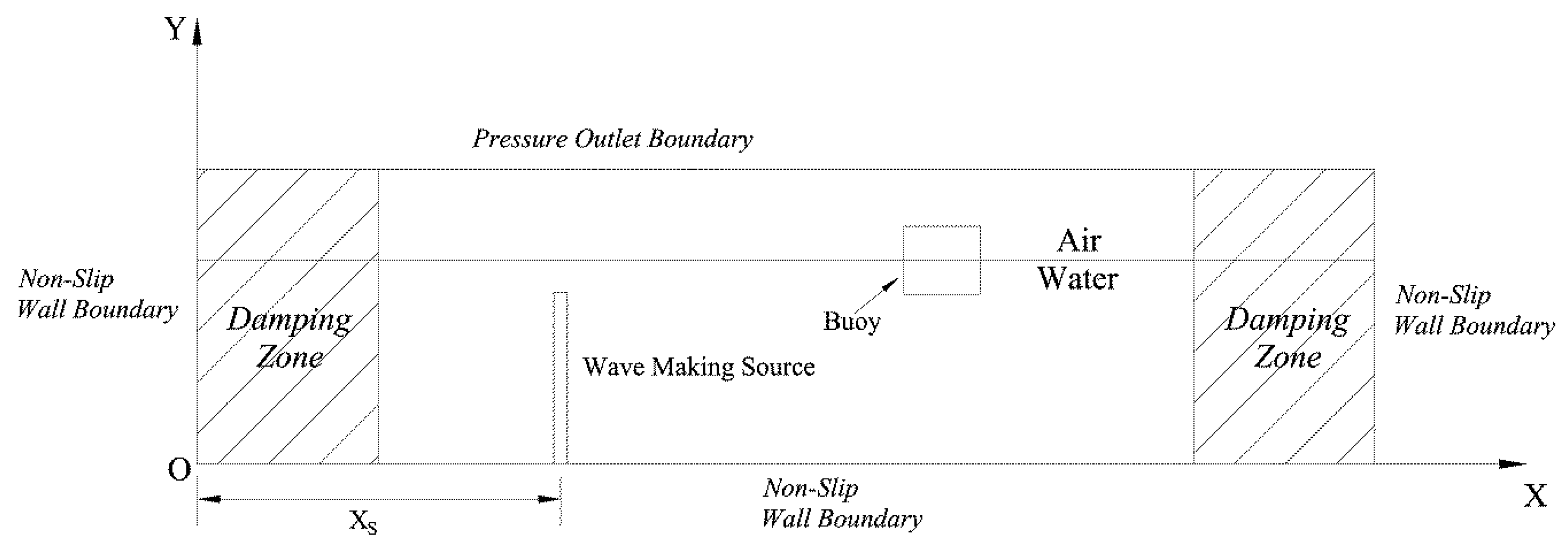
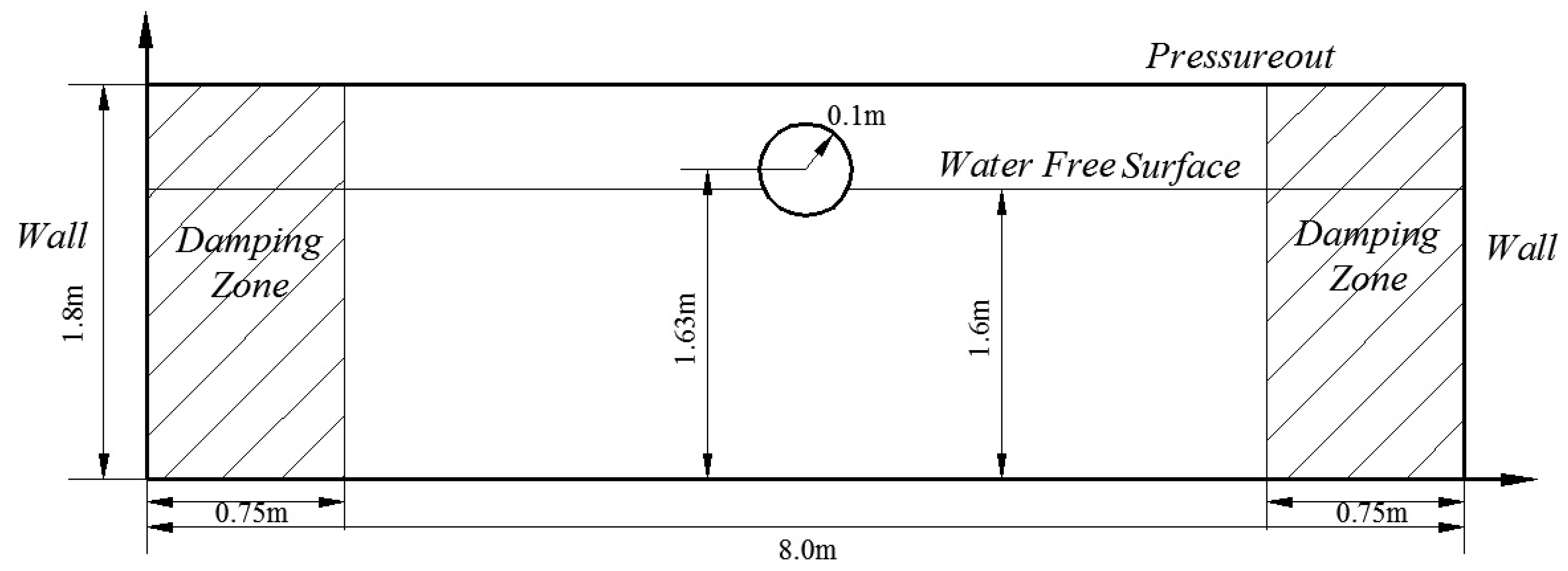
2.2. Numerical Wave Tank
2.3. Heaving Motion of Buoy
2.4. Numerical Solutions
3. Numerical Model Validation
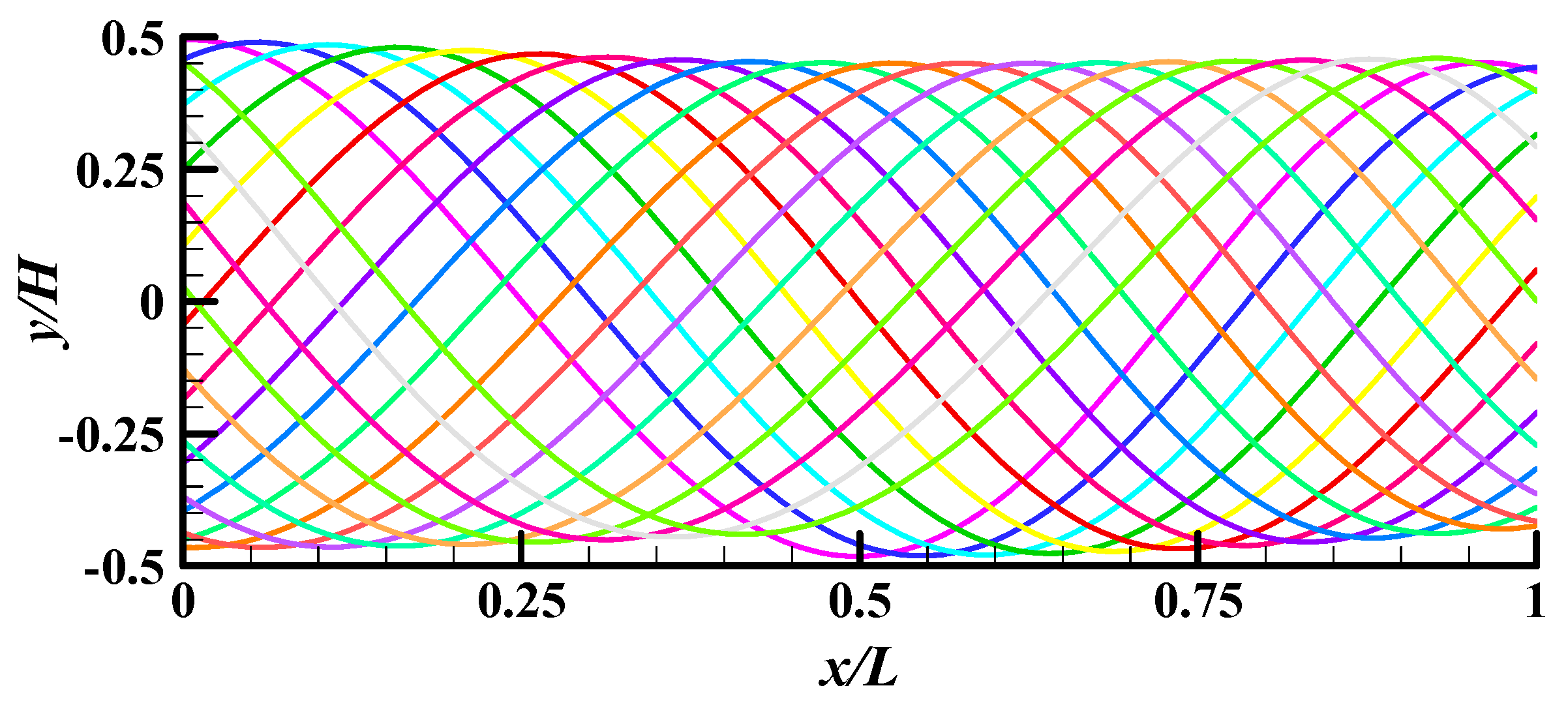
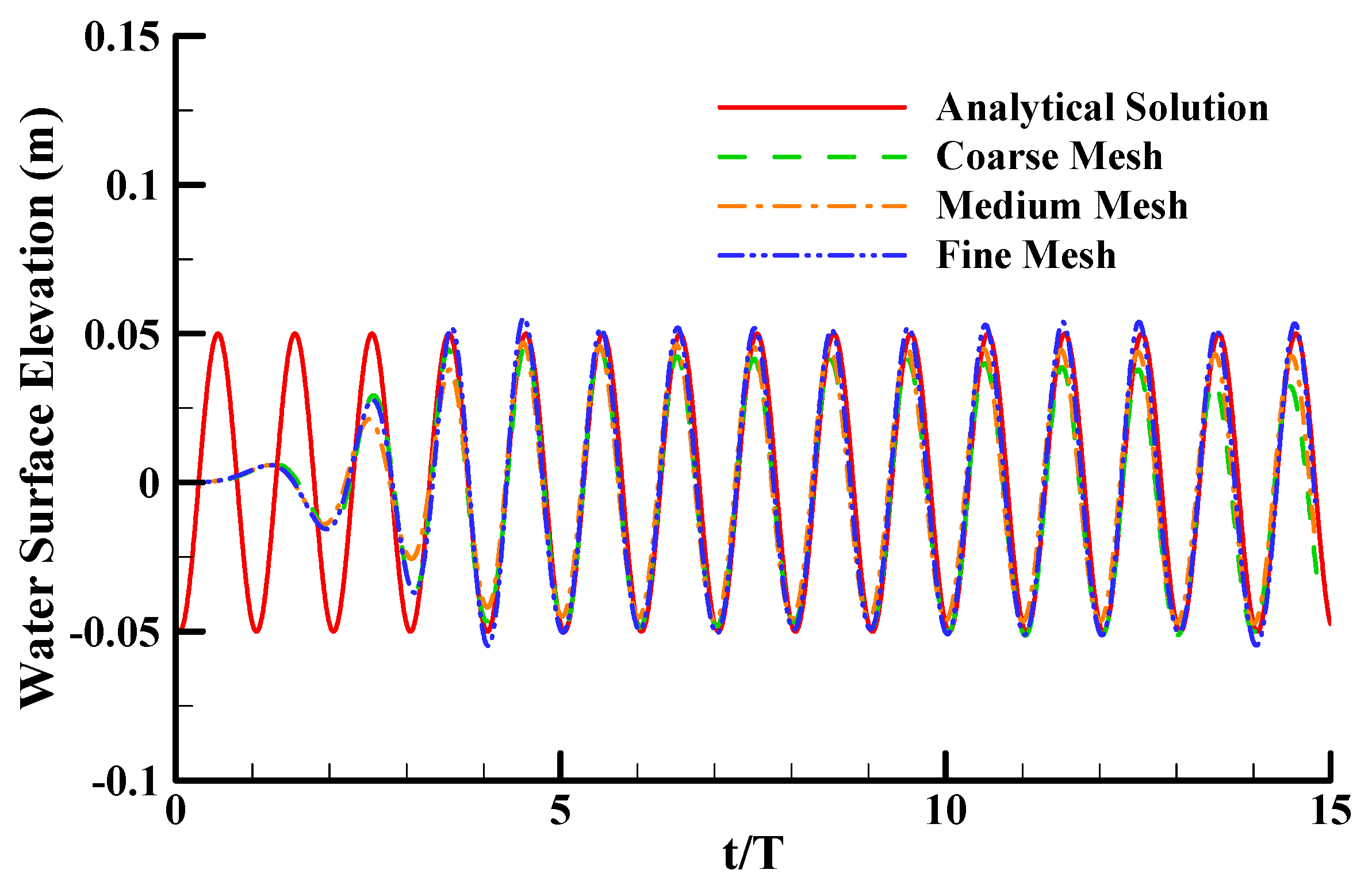
3.1. Regular Wave Generation and Absorbing
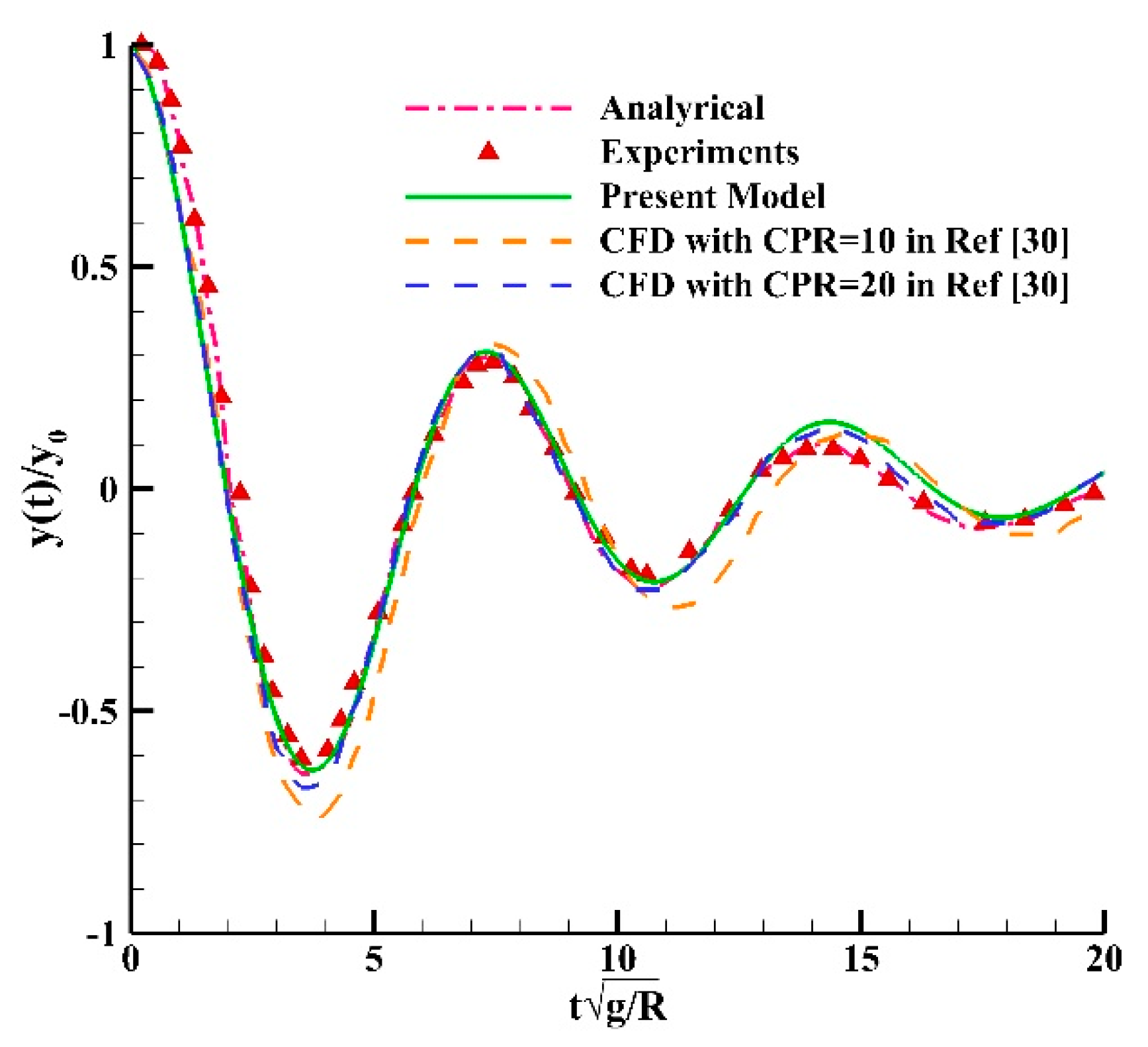
3.2. Free Decay of a Heaving Circular Cylinder
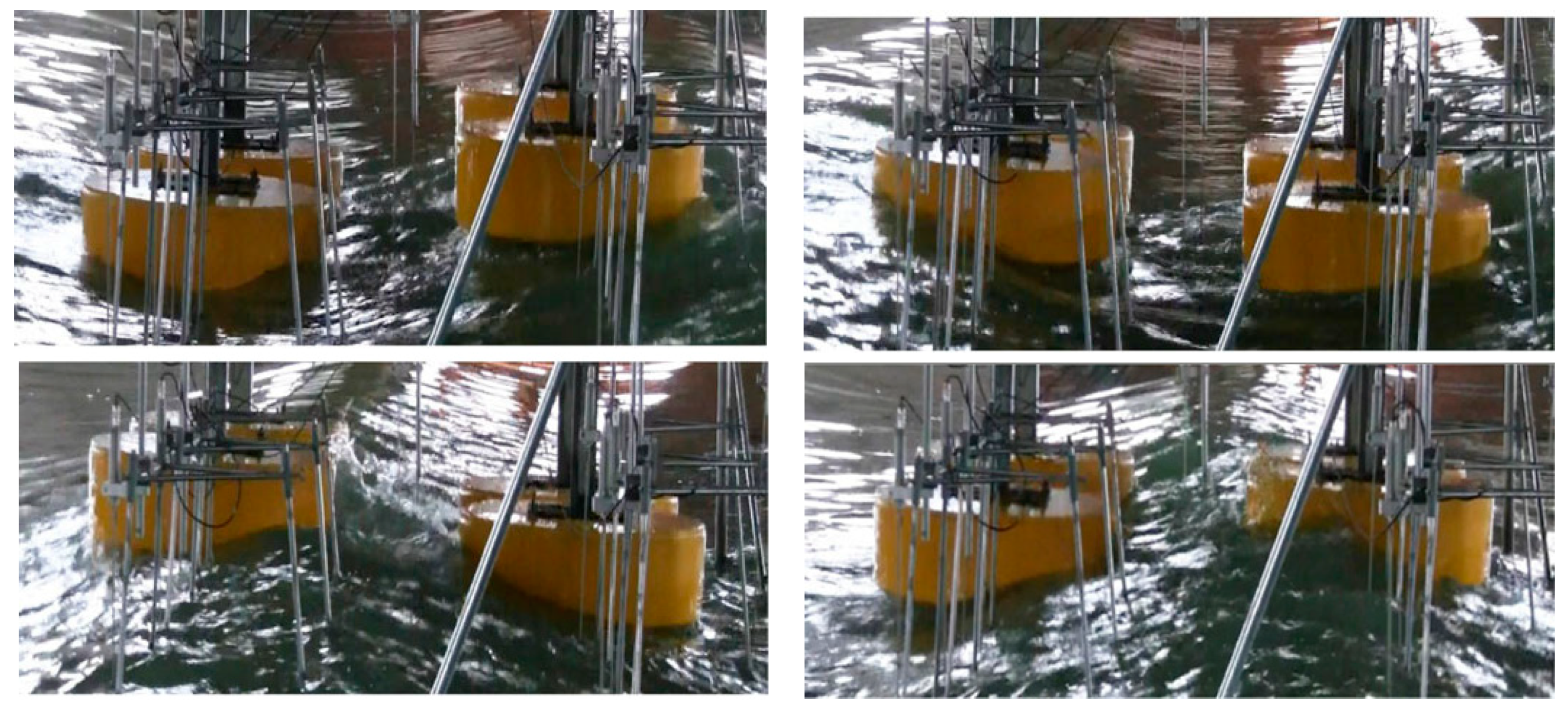
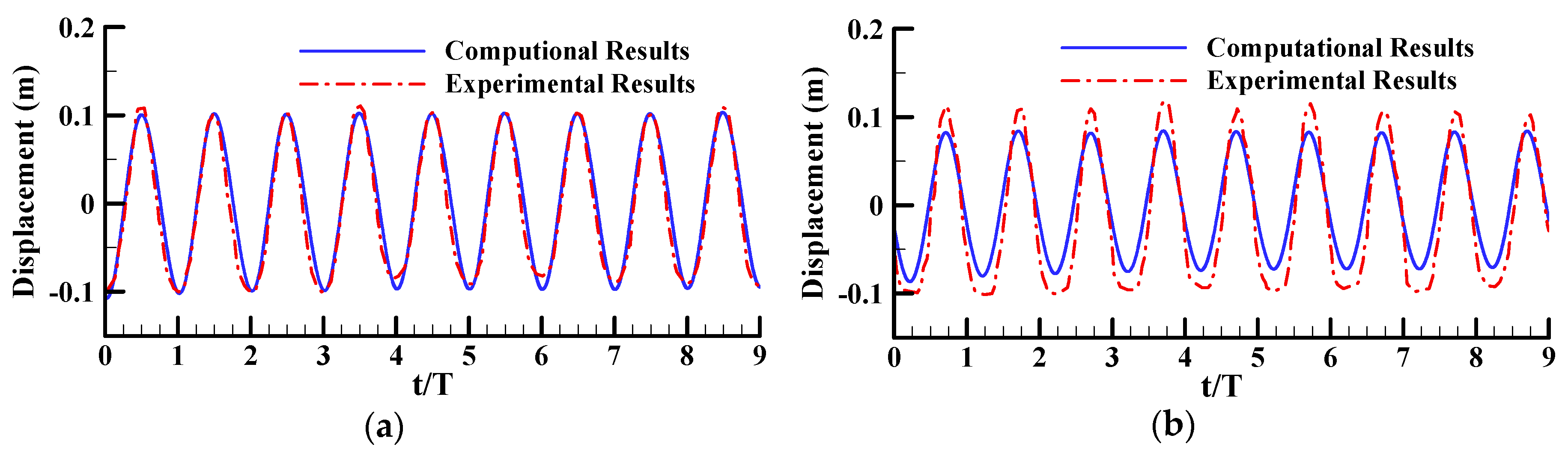
3.3. Heave Oscillation of Floating Buoy Under Wave Excitation
4. Results and Discussion
4.1. Effects of Incident Wave Conditions
4.2. Effects of Buoy Submerged Depth
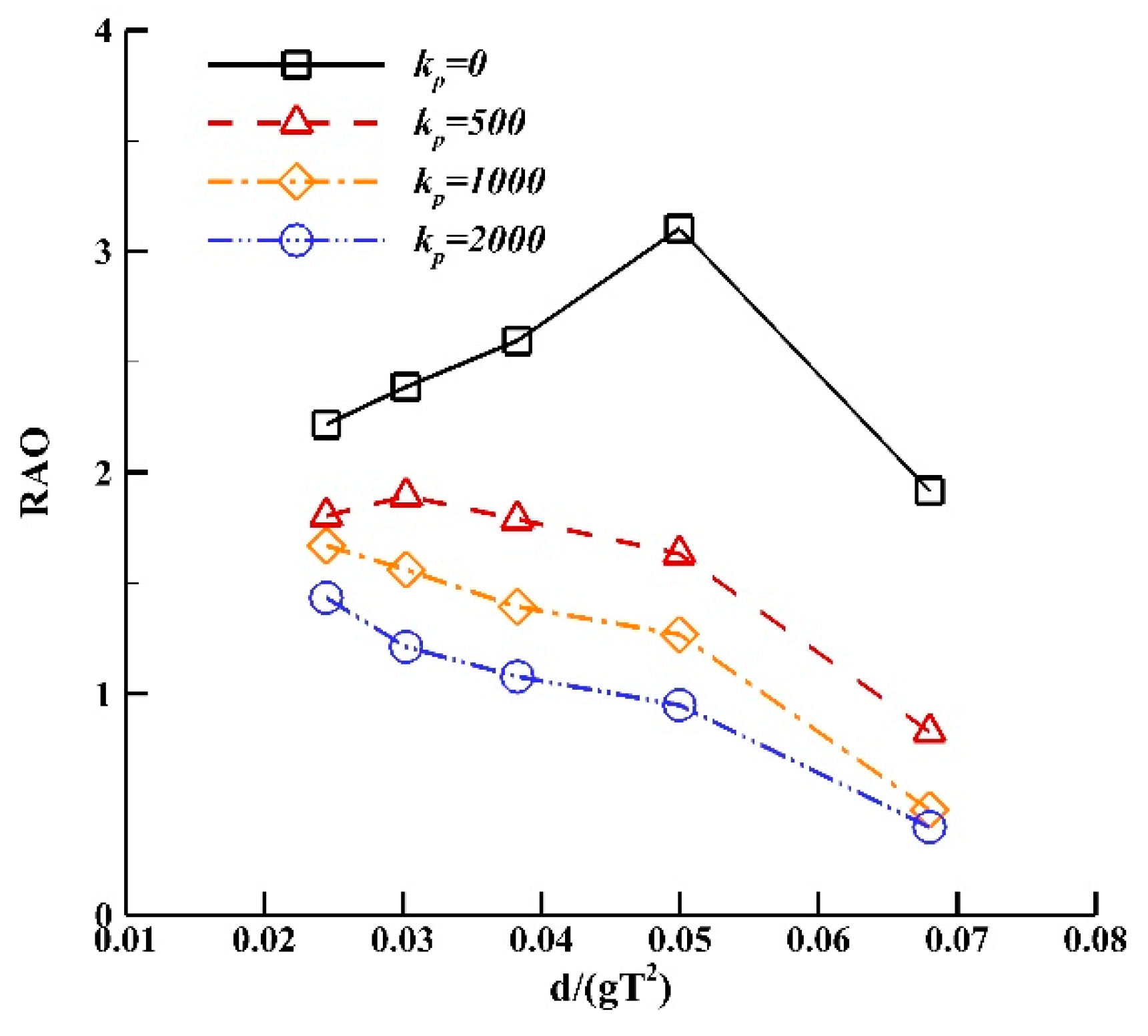
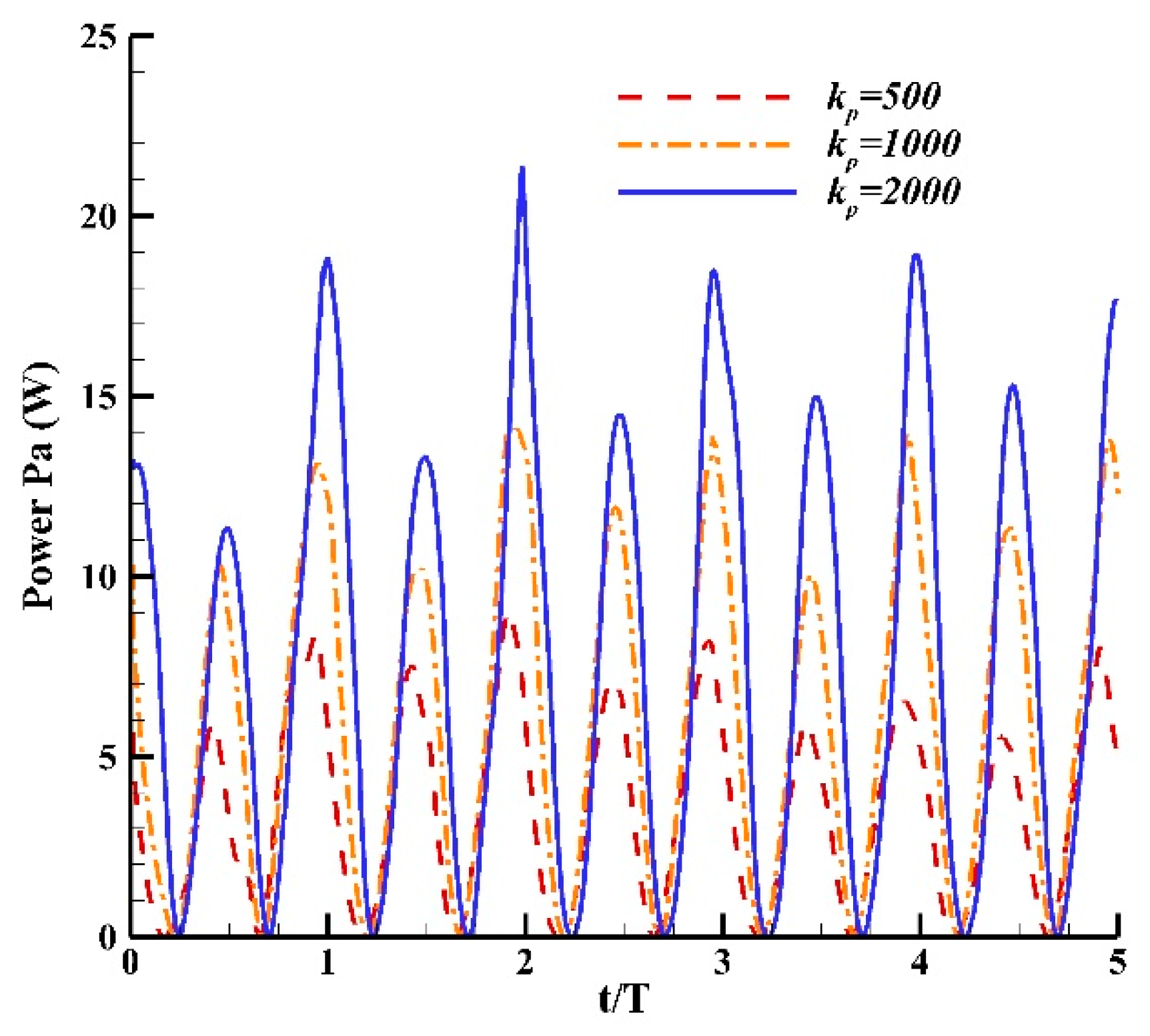
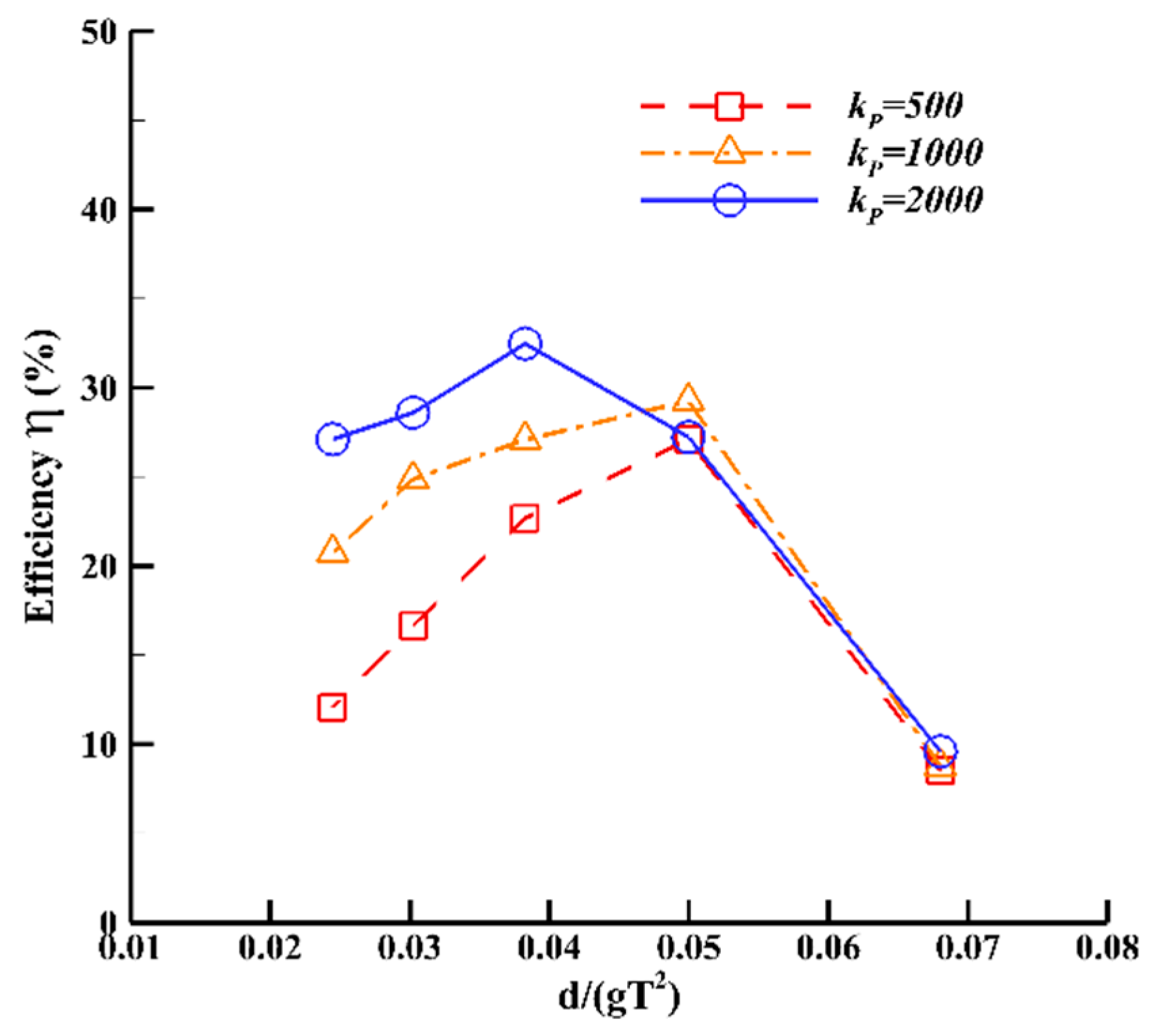
4.3. Effects of PTO Mechanism
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| cg | wave group velocity [m/s] |
| d | water depth [m] |
| g | acceleration due to gravity [m/s2] |
| H | wave height [m] |
| k | turbulence kinetic energy [m2/s2] |
| kw | wave number [-] |
| kp | PTO coefficient [N·s/m] |
| l | side length of buoy [m] |
| m | mass of the buoy [kg] |
| p | fluid pressure [Pa] |
| Pa | instantaneous absorbed power [N·m] |
| mean absorbed power [N·m] | |
| qs | wave making intensity [s−1] |
| R | radius of the cylinder [N] |
| s | submerged depth of buoy in still water [m] |
| S | submerged depths ratio S = s/l [-] |
| t | time [s] |
| t* | |
| T | wave period [s] |
| ui | velocity component [m/s] |
| u, v | velocity in x, y direction [m/s] |
| W | width ratio [-] |
| X0 | self-defined constant [m] |
| η | absorption efficiency [%] |
| ρ | fluid density [kg/m³] |
| ω | circular frequency [s−1] |
Abbreviation
| CFD | Computational fluid dynamics |
| CPR | Number of cells per cylinder radius |
| DOF | Degree of freedom |
| NITA | Non-iterative time advancement |
| NS | Navier-Stokes |
| NWT | Numerical wave tank |
| PISO | Pressure-Implicit with Splitting of Operators |
| PTO | Power take-off |
| RAO | Response amplitude operator |
| UDF | User defined function |
| VOF | Volume of fluid |
| WEC | Wave energy converter |
References
- Antonio, F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Hirohisa, T. Sea trial of a heaving buoy wave power absorber. In Proceedings of the 2nd International Symposium on Wave Energy Utilization, Trondheim, Norway, 22–24 June 1982; pp. 403–417. [Google Scholar]
- Budal, K.; Falnes, J.; Iversen, L.C.; Lillebekken, P.M.; Oltedal, G.; Hals, T.; Hoy, A.S. The Norwegian wave-power buoy project. In Proceedings of the 2nd International Symposium on Wave Energy Utilization, Trondheim, Norway, 22–24 June 1982; pp. 323–344. [Google Scholar]
- Cleason, L.; Forsberg, J.; Rylander, A.; Sjöström, B.O. Contribution to the theory and experience of energy production and transmission from the buoy-concept. In Proceedings of the 2nd International Symposium on Wave Energy Utilization, Trondheim, Norway, 22–24 June 1982; pp. 345–370. [Google Scholar]
- Weber, J.; Mouwen, F.; Parish, A.; Robertson, D. WaveBob—Research & development network and tools in the context of systems engineering. In Proceedings of the 8th European Wave Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009; pp. 416–420. [Google Scholar]
- Mustapa, M.A.; Yaakob, O.B.; Ahmed, Y.M.; Rheem, C.K.; Koh, K.K.; Adnan, F.A. Wave energy device and breakwater integration: A review. Renew. Sustain. Energy Rev. 2017, 77, 43–58. [Google Scholar] [CrossRef]
- Garcia-Rosa, P.B.; Cunha, J.P.V.S.; Lizarralde, F.; Estefen, S.F.; Machado, I.R.; Watanabe, E.H. Wave-to-wire model and energy storage analysis of an ocean wave energy hydperbaric converter. IEEE J. Ocean. Eng. 2013, 39, 386–397. [Google Scholar] [CrossRef]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M.M. Non-linear numerical modelling and experimental testing of a point absorber wave energy converter. Ocean. Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Hann, M.; Greaves, D.; Raby, A. Snatch loading of a single taut moored floating wave energy converter due to focussed wave groups. Ocean. Eng. 2015, 96, 258–271. [Google Scholar] [CrossRef] [Green Version]
- Falnes, J. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Heikkinen, H.; Lampinen, M.J.; Böling, J. Analytical study of the interaction between waves and cylindrical wave energy converters oscillating in two models. Renew. Energy 2013, 50, 150–160. [Google Scholar] [CrossRef]
- António, F.D.O. Modelling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean. Eng. 2007, 34, 2021–2032. [Google Scholar]
- António, F.D.O. Phase control through load control of oscillating-body wave energy converters with hydraulic PTO system. Ocean. Eng. 2008, 35, 358–366. [Google Scholar]
- Ricci, P.; Lopez, J.; Santos, M.; Ruiz-Minguela, P.; Villate, J.L.; Salcedo, F.; Falcão, A.D. Control strategies for a wave energy converter connected to a hydraulic power take-off. IET Renew. Power Gener. 2011, 5, 234–244. [Google Scholar] [CrossRef]
- Korde, U.A. On a near-optimal control approach for a wave energy converter in irregular waves. Appl. Ocean. Res. 2014, 46, 79–93. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On improving wave energy conversion, part I: Optimal and control technologies. Renew. Energy 2015, 75, 922–934. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On improving wave energy conversion, part II: Development of latching control technologies. Renew. Energy 2015, 75, 935–944. [Google Scholar] [CrossRef]
- Evans, D.V.; Jeffrey, D.C.; Salter, S.H.; Taylor, J.R.M. Submerged cylinder wave energy device: theory and experiment. Appl. Ocean. Res. 1979, 1, 3–12. [Google Scholar] [CrossRef]
- Davis, J.P. Wave energy absorption by the Bristol cylinder-linear and non-linear effects. Inst. Civ. Eng. Proc. 1990, 89, 317–340. [Google Scholar] [CrossRef]
- Liu, Z.; Cui, Y.; Zhao, H.; Shi, H.; Hyun, B.S. Effects of damping plate and taut-line system on mooring stability of small wave energy convertor. Math. Probl. Eng. 2015, 1–10. [Google Scholar] [CrossRef]
- Oskamp, J.A.; Özkan-Haller, H.T. Power calculations for a passively tuned point absorber wave energy converter on the Oregon coast. Renew. Energy 2012, 45, 72–77. [Google Scholar] [CrossRef] [Green Version]
- Harnois, V.; Weller, S.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soulé, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yu, Y.H. A synthesis of numerical methods for modelling wave energy converter-point absorbers. Renew. Sustain. Energy Rev. 2012, 16, 4352–4364. [Google Scholar] [CrossRef]
- Agamloh, E.B.; Wallace, A.K.; Von Jouanne, A. Application of fluid–structure interaction simulation of an ocean wave energy extraction device. Renew. Energy 2008, 33, 748–757. [Google Scholar] [CrossRef]
- Bhinder, M.; Mingham, C.; Causon, D.; Rahmati, M.; Aggidis, G.; Chaplin, R. Numerical and experimental study of a surging point absorber wave energy converter. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Yu, Y.; Li, Y. A RANS simulation for the heave response of a two-body floating point wave absorber. In Proceedings of the 21st international Offshore (Ocean) and Polar Engineering Conference, Trondheim, Norway, 22–24 June 2011. [Google Scholar]
- Vicinanza, D.; Dentale, F.; Salerno, D.; Buccino, M. Structural response of Seawave Slot-Cone Generator (SSG) from Random Wave CFD simulations. In Proceedings of the International Offshore and Polar Engineering Conference (ISOPE 2015), Kona, HI, USA, 21–26 June 2015; pp. 985–991. [Google Scholar]
- Buccino, M.; Dentale, F.; Salerno, D.; Contestabile, P.; Calabrese, M. The Use of CFD in the Analysis of Wave Loadings Acting on Seawave Slot-Cone Generators. Sustainability 2016, 8, 1255. [Google Scholar] [CrossRef]
- Zhao, X.; Ning, D.; Zhang, C.; Liu, Y.; Kang, H. Analytical study on an oscillating buoy wave energy converter integrated into a fixed box-type breakwater. Math. Probl. Eng. 2017, 2017, 3960401. [Google Scholar] [CrossRef]
- Zhao, X.; Ning, D.; Zhang, C.; Kang, H. Hydrodynamic investigation of an oscillating buoy wave energy converter integrated into a pile-restrained floating breakwater. Energies 2017, 10, 712. [Google Scholar] [CrossRef]
- Ning, D.; Zhao, X.; Göteman, M.; Kang, H. Hydrodynamic performance of a pile-restrained WEC-type floating breakwater: An experimental study. Renew. Energy 2016, 95, 531–541. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z.; Liang, D.F. Experimental investigation on hydrodynamic performance of a breakwater-integrated WEC system. Ocean. Eng. 2019, 171, 25–32. [Google Scholar] [CrossRef]
- Zhang, H.C.; Xu, D.L.; Liu, C.R.; Wu, Y.S. Wave energy absorption of a wave farm with an array of buoys and flexible runway. Energy 2016, 109, 211–223. [Google Scholar] [CrossRef]
- Ansys Inc. ANSYS Fluent 12.0 Theory Guide; Ansys Inc.: Canonsburg, PA, USA, 2009. [Google Scholar]
- Yakhot, V.; Orszag, S.A. Renormalization Group Analysis of Turbulence: I. Basic Theory. J. Sci. Comput. 1986, 1, 1–51. [Google Scholar] [CrossRef]
- Larsen, J.; Dancy, H. Open boundaries in short wave simulations—A new approach. Coast. Eng. 1983, 7, 285–297. [Google Scholar] [CrossRef]
- Li, S.Z. Study on 2D Numerical Wave Tank Based on Fluent. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2006. [Google Scholar]
- Anbarsooz, M.; Passandideh-Fard, M.; Moghiman, M. Numerical simulation of a submerged cylinder wave energy converter. Renew. Energy 2014, 64, 132–143. [Google Scholar] [CrossRef]
- Qu, N. Study on Hydrodynamic Performance of Oscillating Buoy WEC Considering Power Take-Off System. Master’s Thesis, Ocean University of China, Qingdao, China, 2014. [Google Scholar]
- Yu, Y.H.; Li, Y. Reynolds-averaged Navier-Stokes simulation of the heave performance of a two-body floating-point absorber wave energy system. Comput. Fluids 2014, 73, 104–114. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Resolution | Coarse Mesh | Medium Mesh | Fine Mesh |
|---|---|---|---|
| Number of Grids | 10,817 | 35,550 | 144,750 |
| Computation Time | 110 min | 120 min | 580 min |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zeng, Q.; Liu, Z. Hydrodynamic Performance of Rectangular Heaving Buoys for an Integrated Floating Breakwater. J. Mar. Sci. Eng. 2019, 7, 239. https://doi.org/10.3390/jmse7080239
Zhang X, Zeng Q, Liu Z. Hydrodynamic Performance of Rectangular Heaving Buoys for an Integrated Floating Breakwater. Journal of Marine Science and Engineering. 2019; 7(8):239. https://doi.org/10.3390/jmse7080239
Chicago/Turabian StyleZhang, Xiaoxia, Qiang Zeng, and Zhen Liu. 2019. "Hydrodynamic Performance of Rectangular Heaving Buoys for an Integrated Floating Breakwater" Journal of Marine Science and Engineering 7, no. 8: 239. https://doi.org/10.3390/jmse7080239
APA StyleZhang, X., Zeng, Q., & Liu, Z. (2019). Hydrodynamic Performance of Rectangular Heaving Buoys for an Integrated Floating Breakwater. Journal of Marine Science and Engineering, 7(8), 239. https://doi.org/10.3390/jmse7080239