Pulse Ranging Method Based on Active Virtual Time Reversal in Underwater Multi-Path Channel


Abstract
:1. Introduction
- (1)
- A novel AVTR-based pulse ranging method is proposed to improve the accuracy of ranging under multipath environment.
- (2)
- We propose an energy-based adaptive windowed method for further extracting the focusing term from the received signal after AVTR.
- (3)
- Simulation and experimental results have verified the effectiveness of the proposed method.
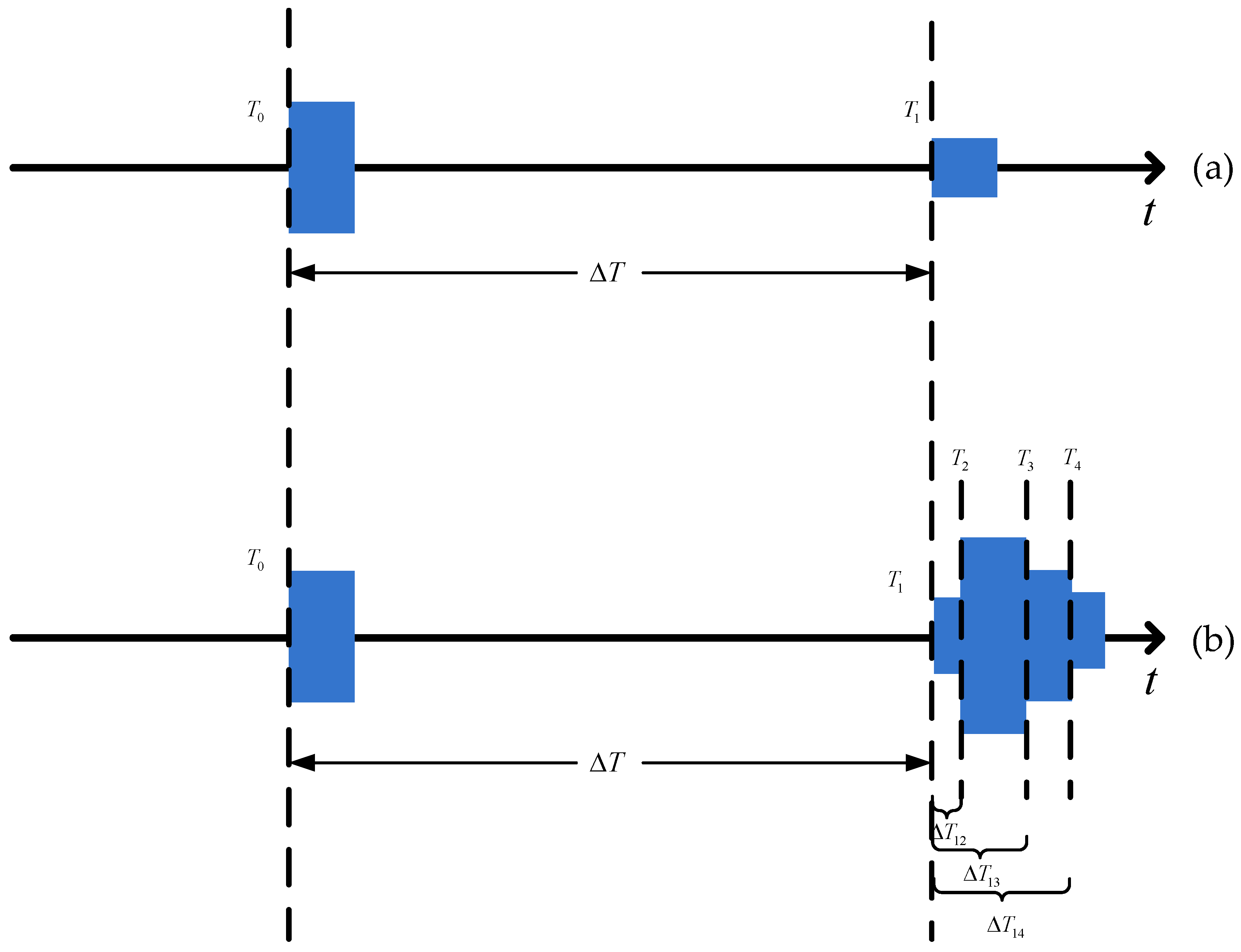
2. Problem Statement
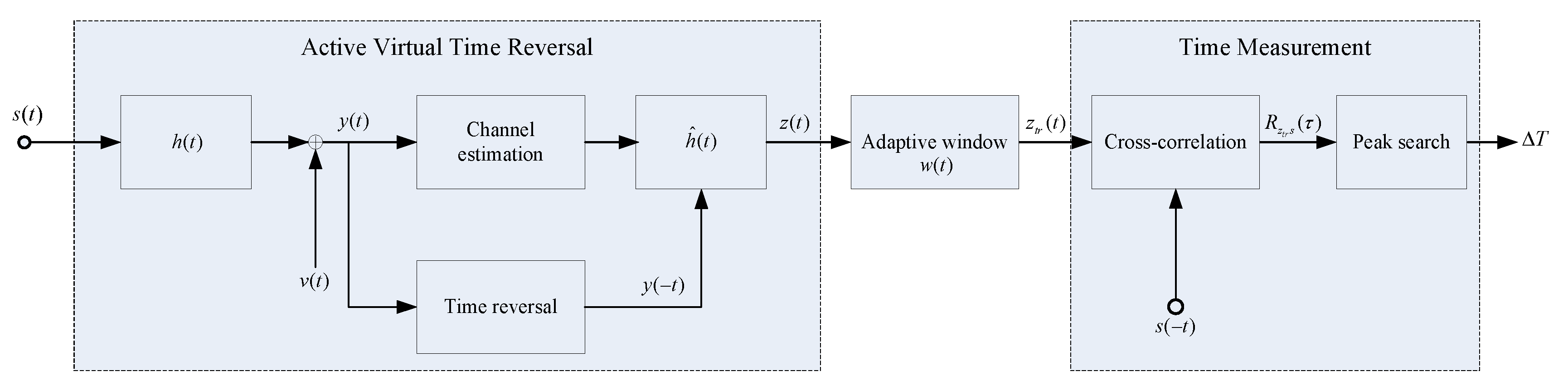
3. Active Virtual Time Reversal Based Pulse Ranging
3.1. Active Virtual Time Reversal
3.2. Energy-Based Adaptive Windowed Algorithm
3.3. Time Measurement
4. Performance Analysis
4.1. Simulation Analysis
- (1)
- Linear frequency modulation (LFM) signal is employed as the emitted signal shown in Figure 3, the frequency range is 10 to 12 kHz, and the signal time width is 20 ms.
- (2)
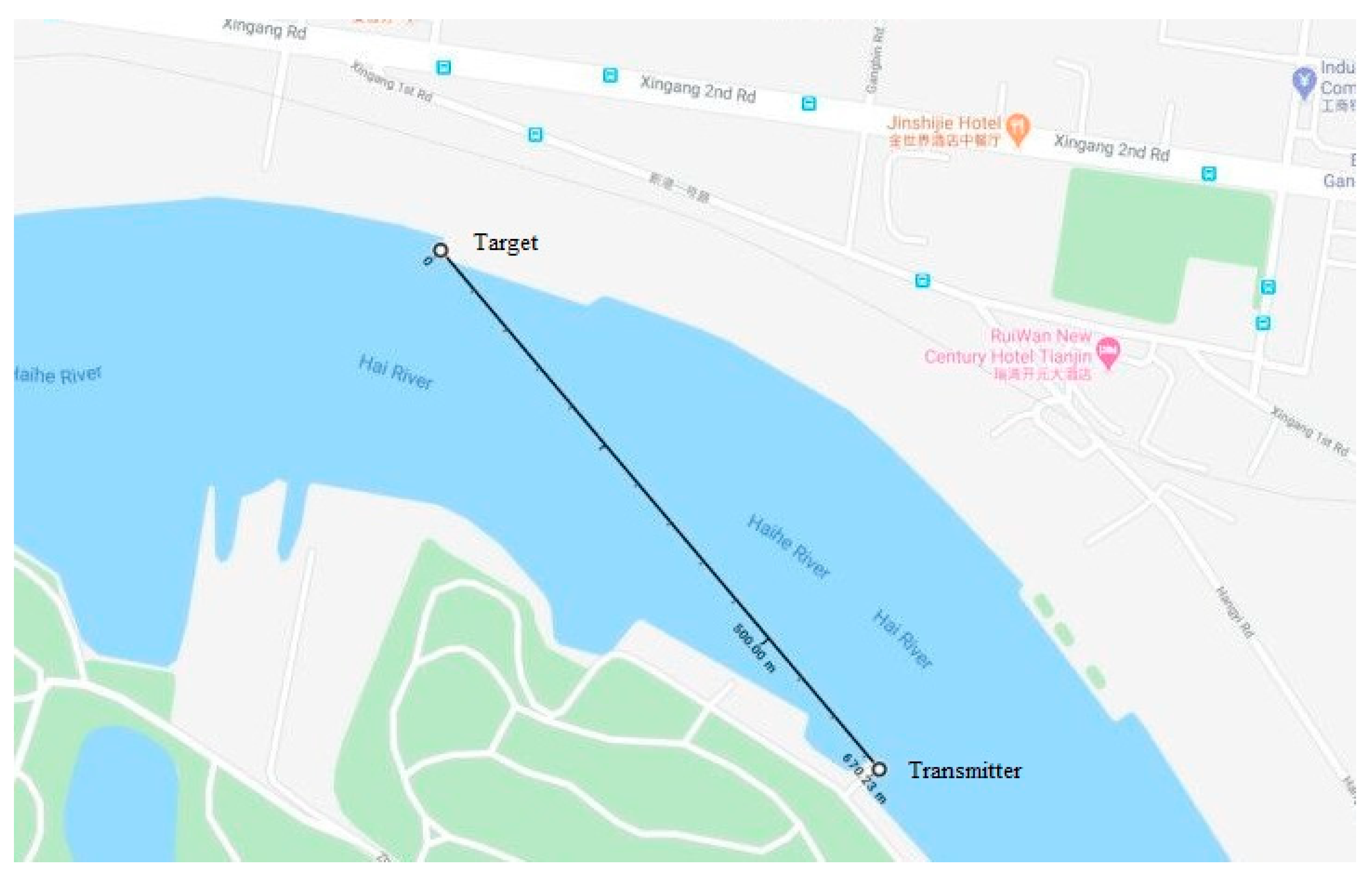
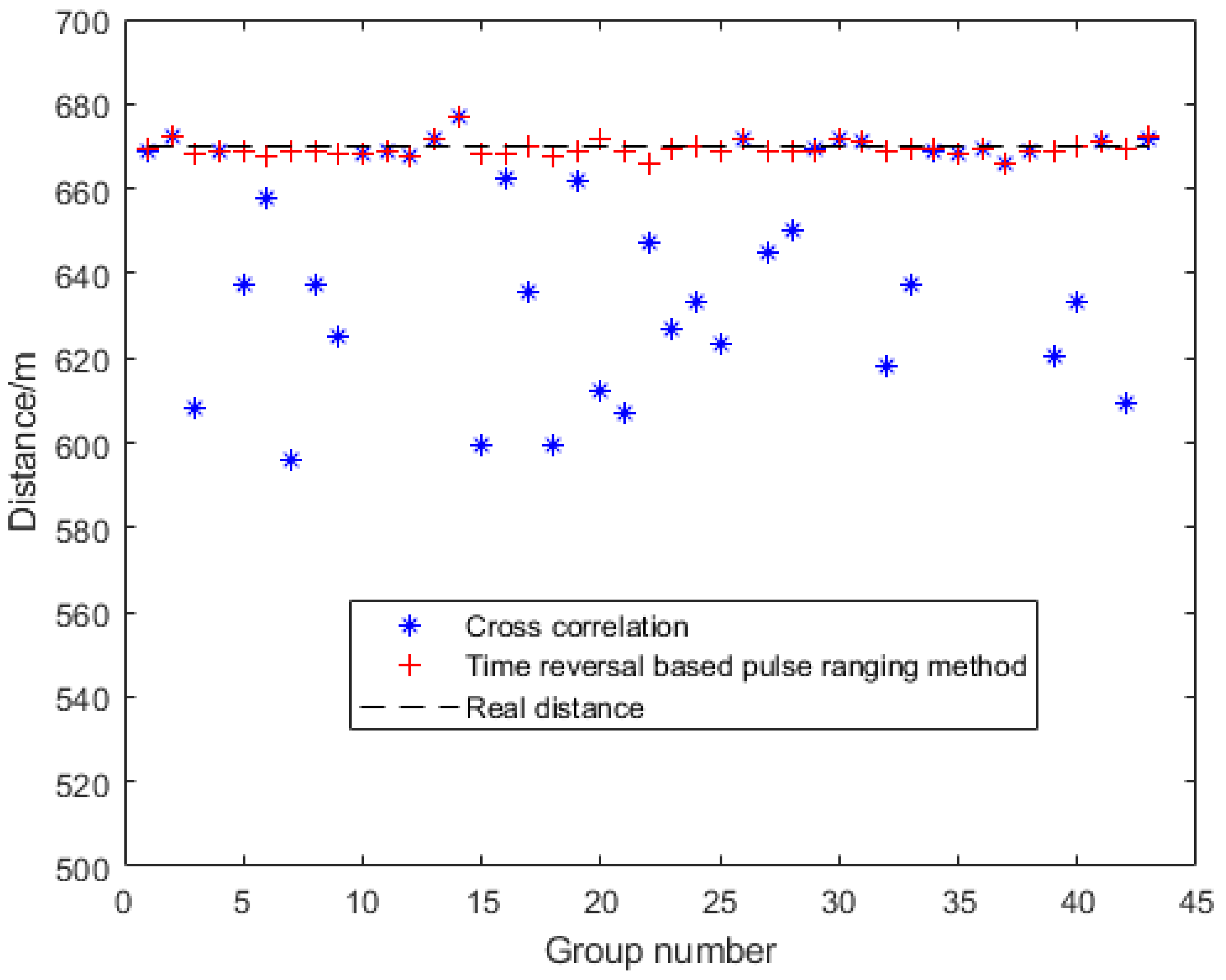
4.2. Experimental Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zou, Z.G.; Xu, X.M.; Tao, Y.; Zhu, Z.T. Joint Design of Ranging and Media Access Control in Underwater Acoustic Networks. In Advanced Materials Research; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2012; Volume 546, pp. 1261–1269. [Google Scholar]
- Wang, J.; Park, J.G. A Novel Indoor Ranging Algorithm Based on a Received Signal Strength Indicator and Channel State Information Using an Extended Kalman Filter. Appl. Sci. 2020, 10, 3687. [Google Scholar] [CrossRef]
- Liu, J.C.; Cheng, Y.T.; Hung, H.S. Joint bearing and range estimation of multiple objects from time-frequency analysis. Sensors 2018, 18, 291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yangmei, Z.; Weijie, T. Underwater segmented sparse decomposition ranging method. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Ningbo, China, 19–22 September 2015; pp. 1–4. [Google Scholar]
- Bayat, M.; Crasta, N.; Aguiar, A.P.; Pascoal, A.M. Range-based underwater vehicle localization in the presence of unknown ocean currents: Theory and experiments. IEEE Trans. Control Syst. Technol. 2015, 24, 122–139. [Google Scholar] [CrossRef]
- Xia, Z.; Li, X.; Meng, X. High resolution time-delay estimation of underwater target geometric scattering. Appl. Acoust. 2016, 114, 111–117. [Google Scholar] [CrossRef]
- Shatara, S.; Tan, X. An efficient, time-of-flight-based underwater acoustic ranging system for small robotic fish. IEEE J. Ocean. Eng. 2010, 35, 837–846. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Wang, D.; Fattouche, M. OFDM transmission for time-based range estimation. IEEE Signal Process. Lett. 2010, 17, 571–574. [Google Scholar]
- Win, M.Z.; Scholtz, R.A. Characterization of ultra-wide bandwidth wireless indoor channels: A communication-theoretic view. IEEE J. Sel. Areas Commun. 2002, 20, 1613–1627. [Google Scholar] [CrossRef] [Green Version]
- Giorgetti, A.; Chiani, M. Time-of-arrival estimation based on information theoretic criteria. IEEE Trans. Signal Process. 2013, 61, 1869–1879. [Google Scholar] [CrossRef]
- Song, S.; Zhang, Q. Multi-dimensional detector for UWB ranging systems in dense multipath environments. IEEE Trans. Wirel. Commun. 2008, 7, 175–183. [Google Scholar] [CrossRef]
- Braasch, M. Multipath Effects, Global Positioning Systems: Theory and Applications; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; Chapter 14; Volume 1. [Google Scholar]
- Freeman, S.E.; Emokpae, L.; Nicholas, M.; Edelmann, G.F. A highly directional transducer for multipath mitigation in high-frequency underwater acoustic communications. J. Acoust. Soc. Am. 2015, 138, EL151–EL154. [Google Scholar] [CrossRef] [Green Version]
- Zeng, W.J.; Jiang, X.; Li, X.L.; Zhang, X.D. Deconvolution of sparse underwater acoustic multipath channel with a large time-delay spread. J. Acoust. Soc. Am. 2010, 127, 909–919. [Google Scholar] [CrossRef]
- Li, C.X.; Guo, M.F.; Zhao, H.F. An Iterative Deconvolution-Time Reversal Method with Noise Reduction, a High Resolution and Sidelobe Suppression for Active Sonar in Shallow Water Environments. Sensors 2020, 20, 2844. [Google Scholar] [CrossRef]
- On, B.; Im, S.; Seo, I. Performance of Time Reversal Based Underwater Target Detection in Shallow Water. Appl. Sci. 2017, 7, 1180. [Google Scholar] [CrossRef] [Green Version]
- Fink, M. Time reversal of ultrasonic fields. I. Basic principles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 555–566. [Google Scholar] [CrossRef]
- Prada, C.; Manneville, S.; Spoliansky, D.; Fink, M. Decomposition of the time reversal operator: Detection and selective focusing on two scatterers. J. Acoust. Soc. Am. 1996, 99, 2067–2076. [Google Scholar] [CrossRef]
- Kuperman, W.; Hodgkiss, W.S.; Song, H.C.; Akal, T.; Ferla, C.; Jackson, D.R. Phase conjugation in the ocean: Experimental demonstration of an acoustic time-reversal mirror. J. Acoust. Soc. Am. 1998, 103, 25–40. [Google Scholar] [CrossRef] [Green Version]
- Sabra, K.G.; Roux, P.; Song, H.C.; Hodgkiss, W.; Kuperman, W.A.; Akal, T.; Stevenson, M.R. Experimental demonstration of time-reversed reverberation focusing in a rough waveguide. Application to target detection. J. Acoust. Soc. Am. 2005, 118, 1904. [Google Scholar] [CrossRef]
- Moura, J.M.; Jin, Y. Detection by time reversal: Single antenna. IEEE Trans. Signal Process. 2006, 55, 187–201. [Google Scholar] [CrossRef]
- Pan, X.; Li, C.; Xu, Y.; Xu, W.; Gong, X. Combination of time-reversal focusing and nulling for detection of small targets in strong reverberation environments. IET Radar Sonar Navig. 2014, 8, 9–16. [Google Scholar] [CrossRef]
- Song, H.C. An overview of underwater time-reversal communication. IEEE J. Ocean. Eng. 2015, 41, 644–655. [Google Scholar] [CrossRef]
- Lei, W.; Yao, L. Performance Analysis of Time Reversal Communication Systems. IEEE Commun. Lett. 2019, 23, 680–683. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Xu, Q.; Safar, Z.; Han, Y.; Wang, B.; Liu, K.R. Statistical learning over time-reversal space for indoor monitoring system. IEEE Internet Things J. 2018, 5, 970–983. [Google Scholar] [CrossRef]
- Huang, P.; Xia, X.G.; Liu, X.; Liao, G. Refocusing and motion parameter estimation for ground moving targets based on improved axis rotation-time reversal transform. IEEE Trans. Comput. Imaging 2018, 4, 479–494. [Google Scholar] [CrossRef]
- Foroozan, F.; Asif, A. Time reversal based active array source localization. IEEE Trans. Signal Process. 2011, 59, 2655–2668. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.-Z.; Wang, H.-Y.; Shen, X.-H.; Ning, W.-Z. The performance of time reversal passive detection over underwater multi-path channel. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–4. [Google Scholar]
- Jing, H.; Wang, H.; Liu, Z.; Shen, X. DOA estimation for underwater target by active detection on virtual time reversal using a uniform linear array. Sensors 2018, 18, 2458. [Google Scholar] [CrossRef] [Green Version]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Numerical Value |
|---|---|
| Average sound speed | 1505 m/s |
| Water depth | 90 m |
| Source depth | 50 m |
| Receiver depth | 50 m |
| Range | 1000 m |
| Amplitude | Delay (ms) | Number of Sea Surface Reflections | Number of Seafloor Reflections |
|---|---|---|---|
| 733.8 | 3 | 2 | |
| 708.6 | 2 | 2 | |
| 692.3 | 2 | 1 | |
| 670 | 1 | 0 | |
| 666.7 | 0 | 0 | |
| 668.8 | 0 | 1 | |
| 677.4 | 1 | 1 | |
| 728.3 | 1 | 2 |
| Method | RMSE (m) |
|---|---|
| Cross correlation ranging | 34.3 |
| Time reversal based pulse ranging | 2.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Wang, H.; Yao, H. Pulse Ranging Method Based on Active Virtual Time Reversal in Underwater Multi-Path Channel. J. Mar. Sci. Eng. 2020, 8, 883. https://doi.org/10.3390/jmse8110883
Zhang Z, Wang H, Yao H. Pulse Ranging Method Based on Active Virtual Time Reversal in Underwater Multi-Path Channel. Journal of Marine Science and Engineering. 2020; 8(11):883. https://doi.org/10.3390/jmse8110883
Chicago/Turabian StyleZhang, Zhichen, Haiyan Wang, and Haiyang Yao. 2020. "Pulse Ranging Method Based on Active Virtual Time Reversal in Underwater Multi-Path Channel" Journal of Marine Science and Engineering 8, no. 11: 883. https://doi.org/10.3390/jmse8110883
APA StyleZhang, Z., Wang, H., & Yao, H. (2020). Pulse Ranging Method Based on Active Virtual Time Reversal in Underwater Multi-Path Channel. Journal of Marine Science and Engineering, 8(11), 883. https://doi.org/10.3390/jmse8110883