Numerical Study on Hydrodynamic Responses of Floating Rope Enclosure in Waves and Currents

Abstract
:1. Introduction
2. Numerical Method
2.1. Wave-Current Field
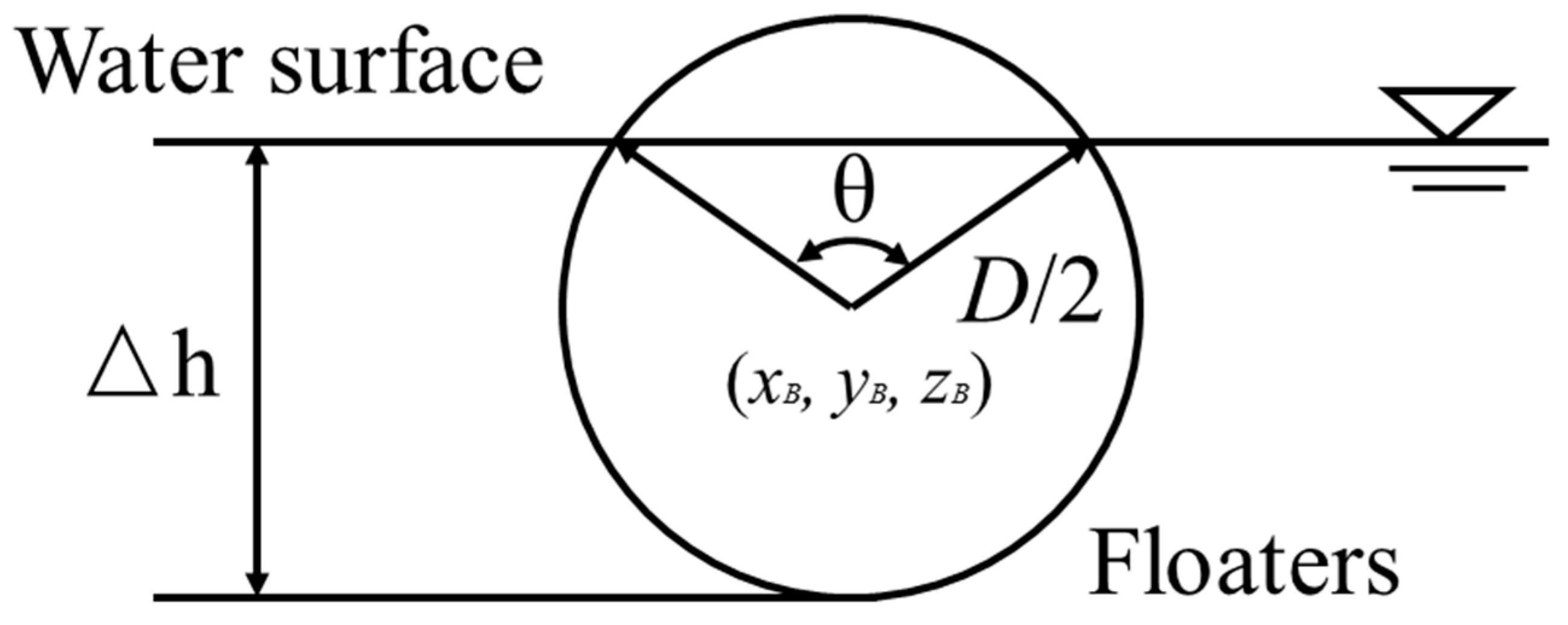
2.2. Model for Floaters
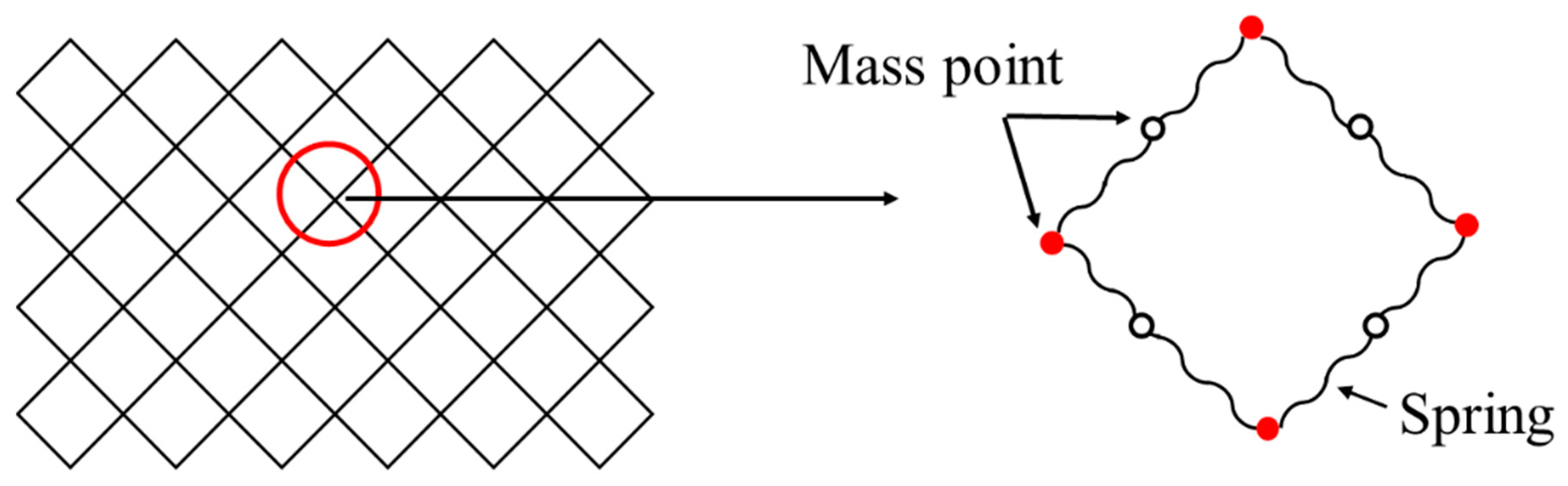
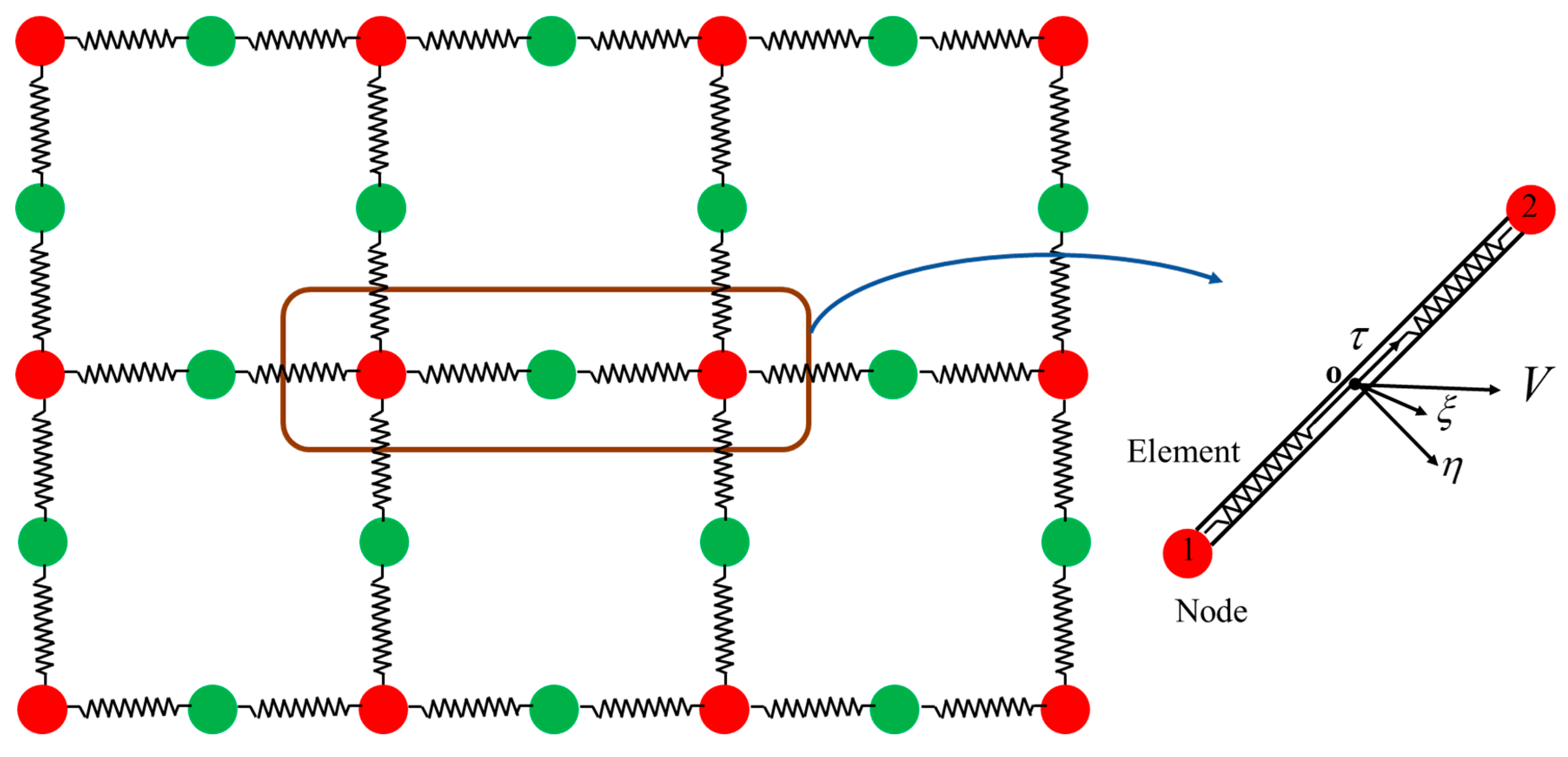
2.3. Model for Net
2.3.1. Force Equation of Net
2.3.2. Hydrodynamic Coefficents of Net
2.3.3. MotionEequation of Net
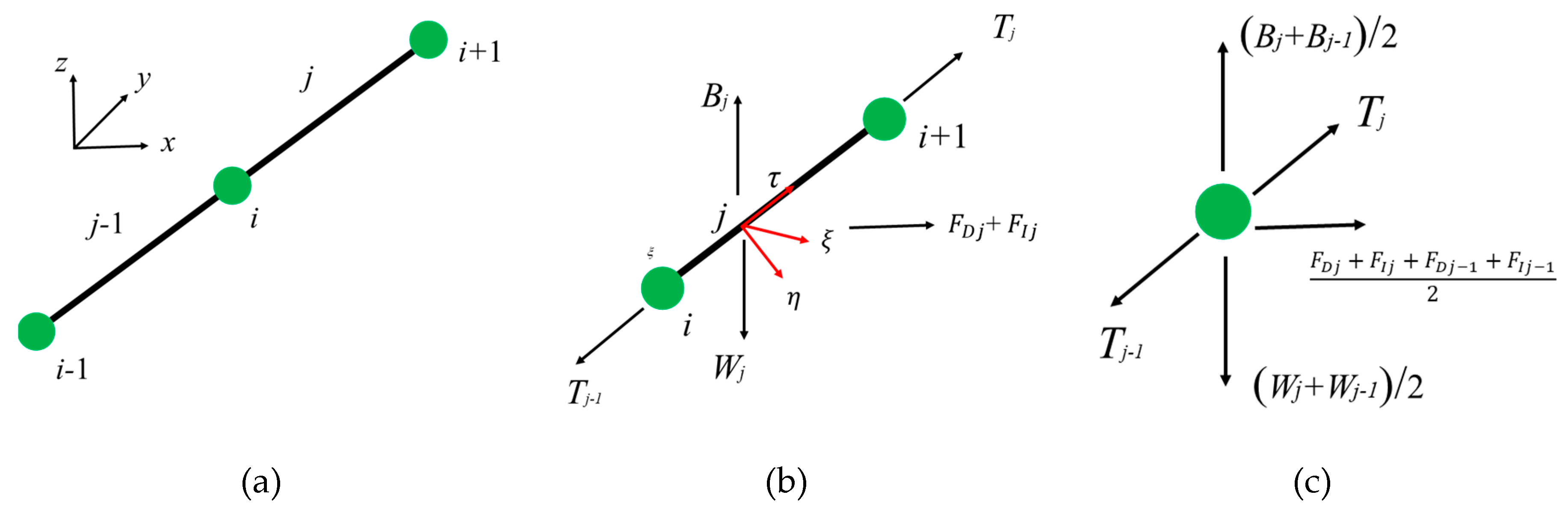
2.4. Model for Mooring lines
2.5. Volume Retention
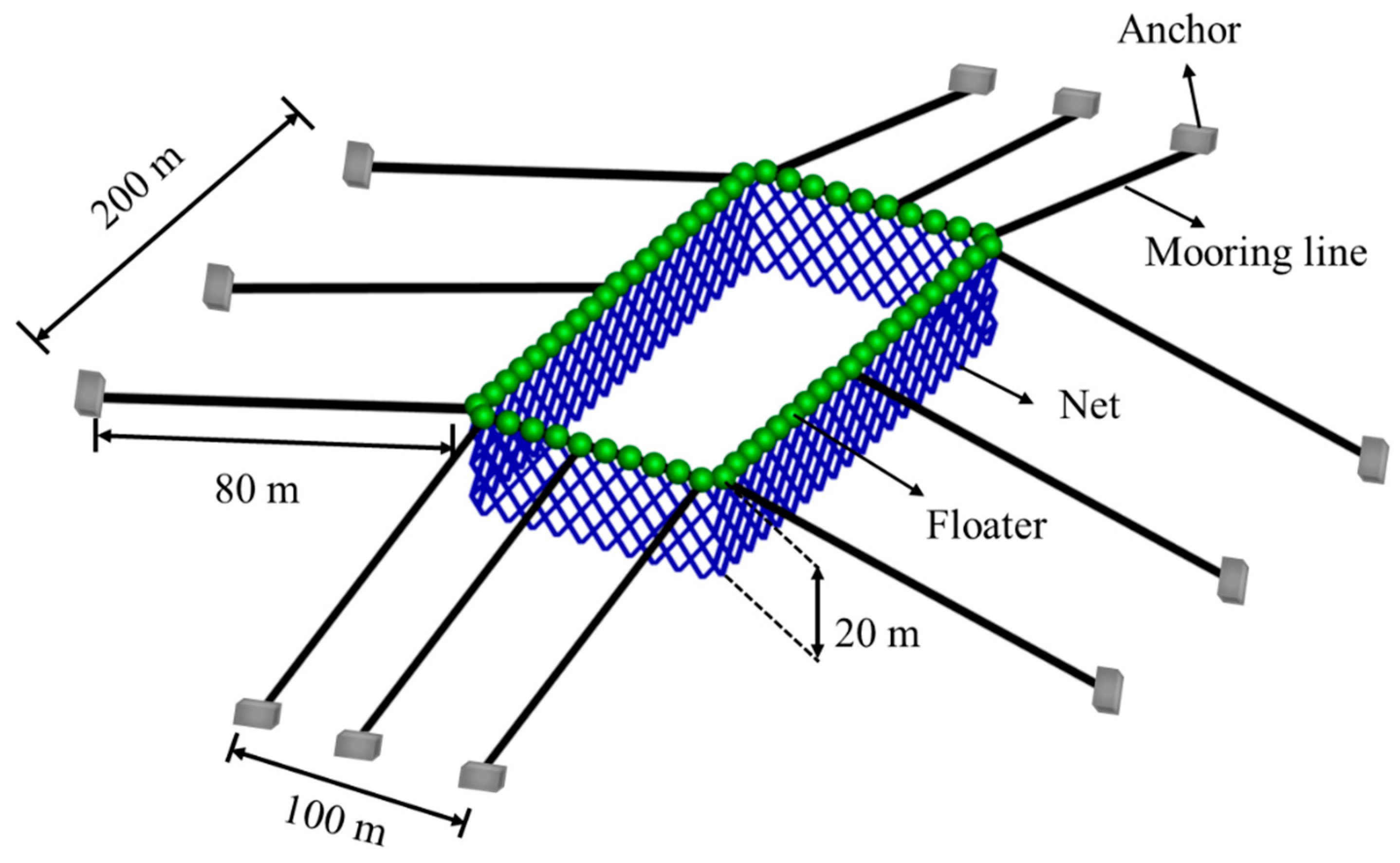
3. Physical Model
3.1. Laboratory Setup
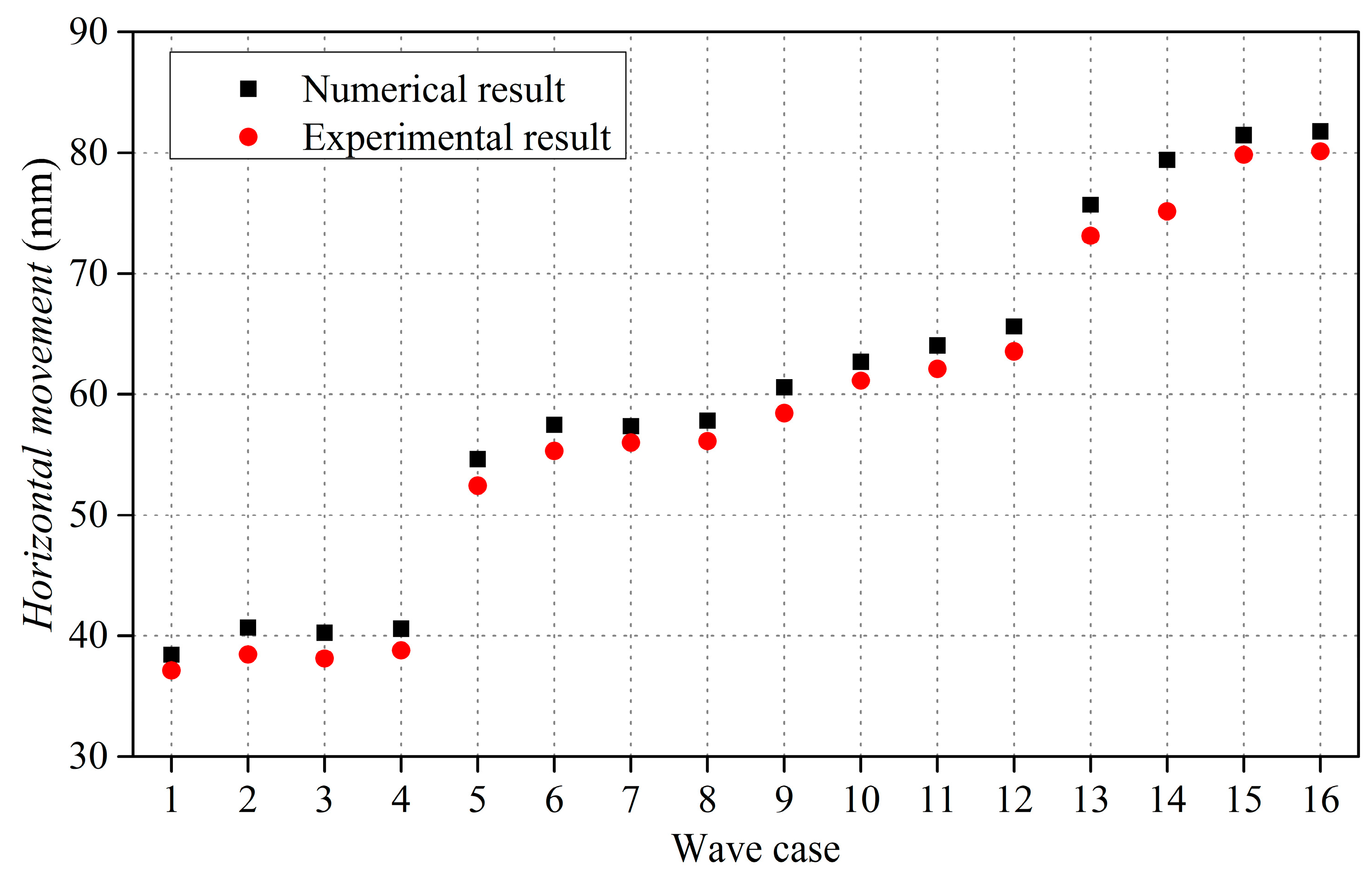
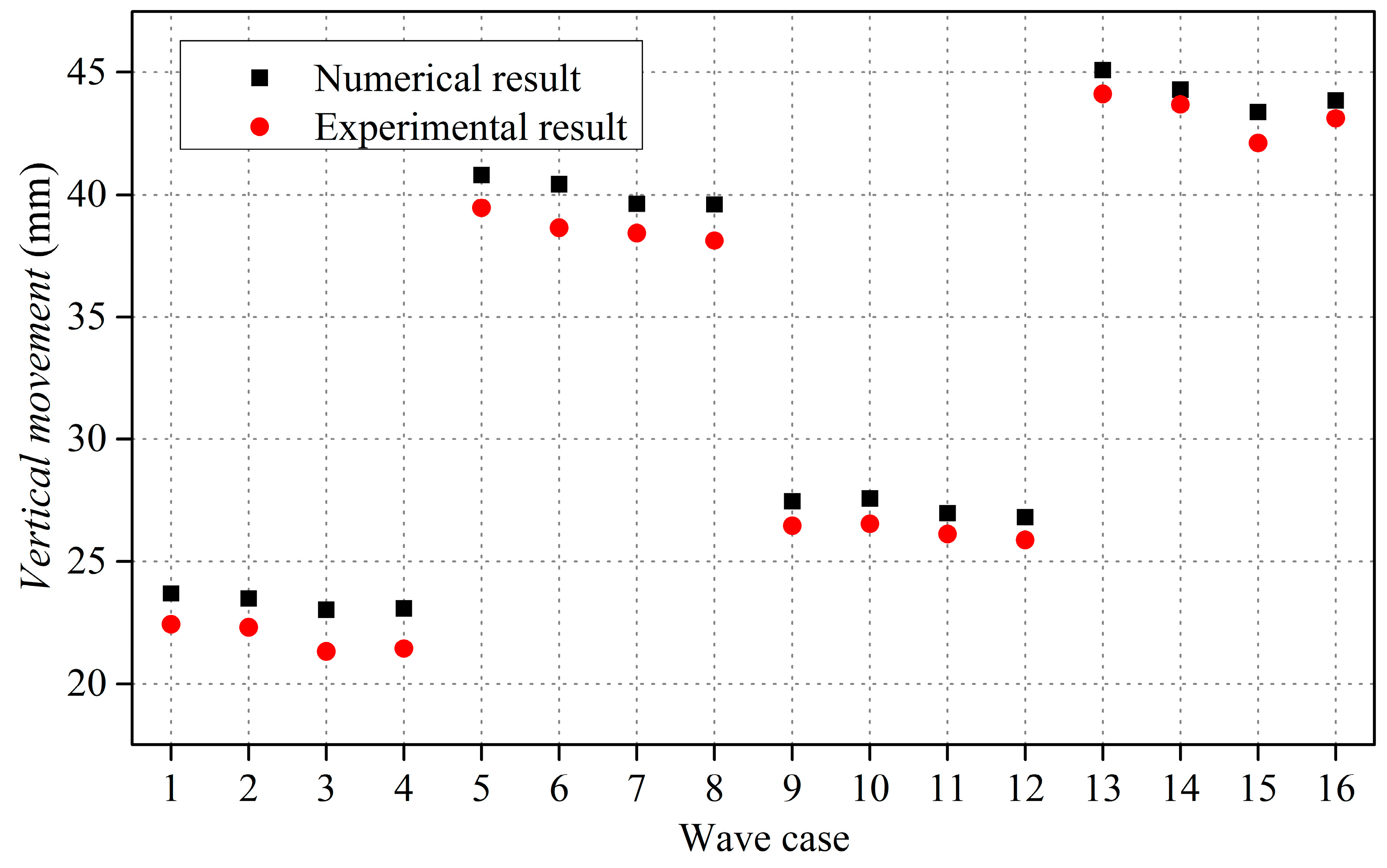
3.2. Verification of the Accuracy of the Numerical Model
4. Results and Discussion
4.1. Analysis for Configurations with Different number of Mooring Lines
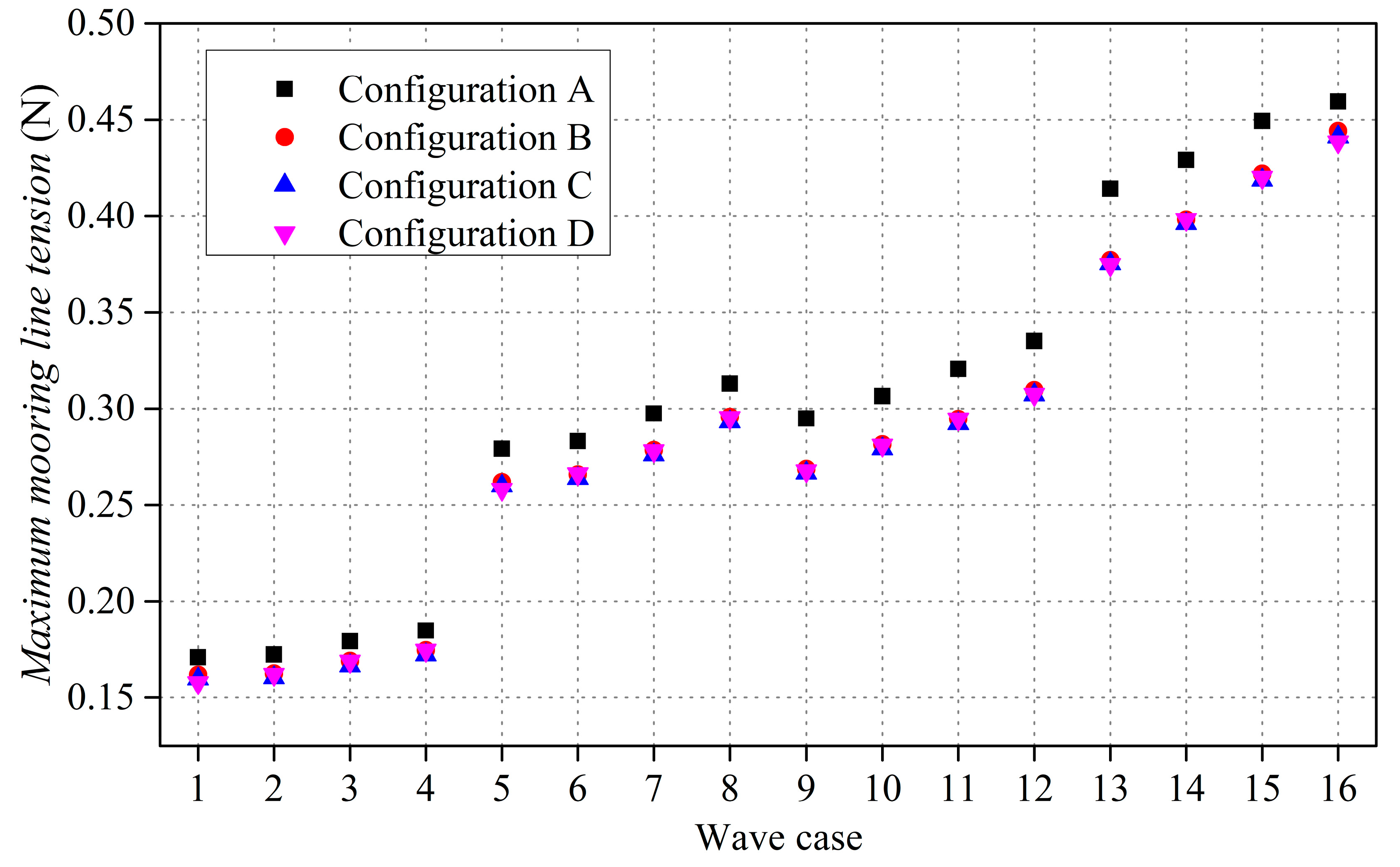
4.1.1. Maximum Mooring Line Tension for Configurations with Different Number of Mooring Lines
4.1.2. Analysis of the Effect of Incident Wave-Current Angles
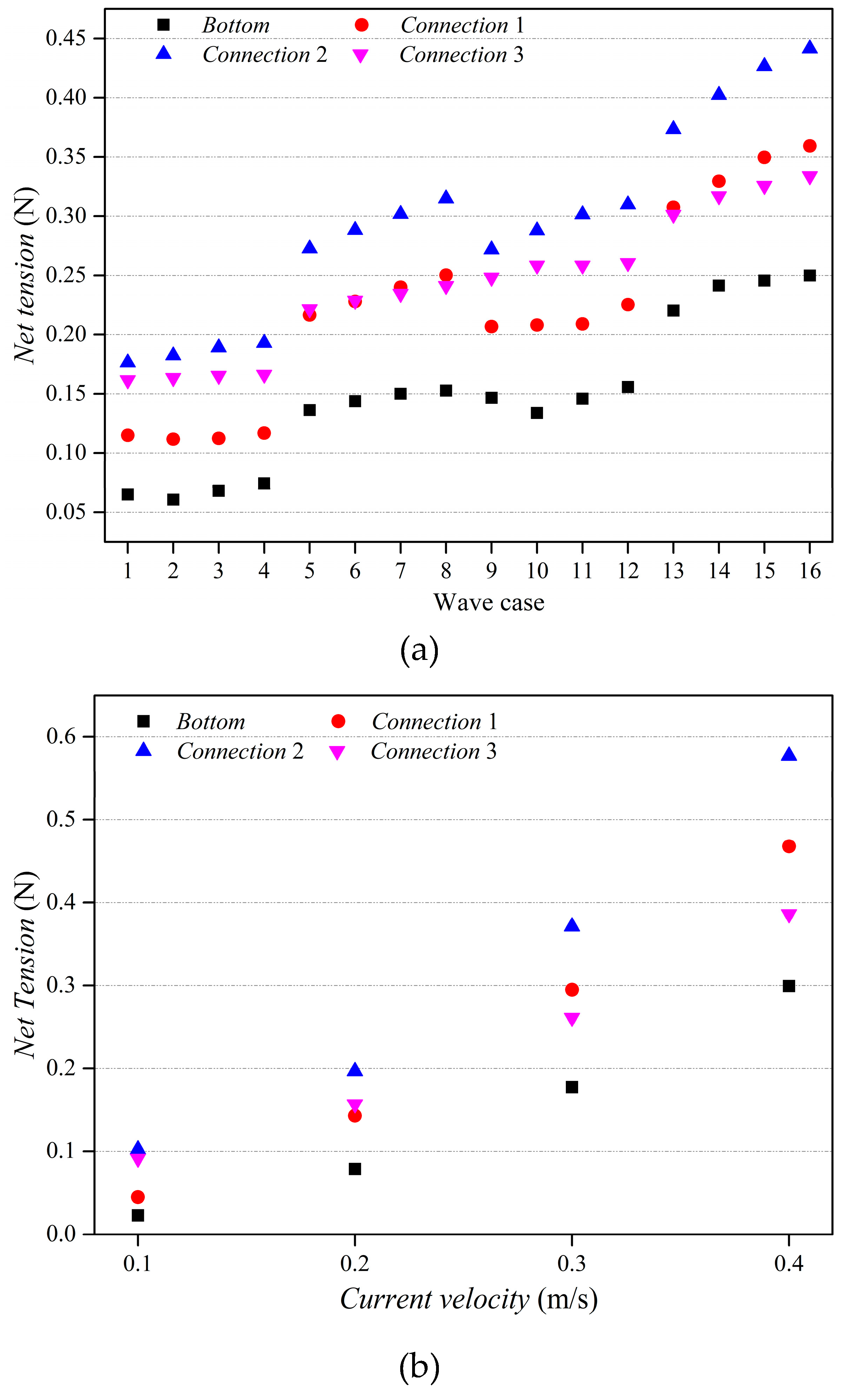
4.1.3. Analysis of Net Tension in Representative Position
4.2. Influence of Different Mooring Arrangements on the Hydrodynamic Characteristics of Floating Rope Enclosure
5. Conclusions
- (1)
- For the floating rope enclosure, the maximum mooring line tension of the floating rope enclosure occurs on both sides of the windward and the windward side experiences the largest external hydrodynamic loads. Increasing the amount of mooring lines on the windward side is helpful to reduce the maximum mooring line tension.
- (2)
- At most sites, the waves are not parallel to the current. When the wave and the current are in the same direction, the mooring line tension is the largest. Increasing the incident angle between waves and currents helps to reduce the maximum mooring line tension. Increasing the angle between waves and currents will have a better effect on reducing the maximum mooring line tension under a higher current velocity.
- (3)
- The maximum net tension of the bottom is much less than that of the connection. The net tension of connection 2 (side of the windward) under combined waves and currents is the largest compared with other connections.
- (4)
- The volume retentions of four configuration of the floating rope enclosure with different mooring system were compared. The numerical results indicate that the volume retention of the floating rope enclosure increases with the increasing amount of mooring lines.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lader, P.F.; Fredheim, A. Dynamic properties of a flexible net sheet in waves and current—A numerical approach. Aquacult. Eng. 2006, 35, 228–238. [Google Scholar] [CrossRef]
- Moe, H.; Fredheim, A.; Hopperstad, O.S. Structural analysis of aquaculture net cages incurrent. J. Fluids Struct. 2010, 26, 503–516. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Bi, C.W.; Chen, C.P.; Li, Y.C.; Dong, G.H. Experimental study on flow velocity and mooring loads for multiple net cages in steady current. Aquacult. Eng. 2015, 67, 24–31. [Google Scholar] [CrossRef]
- Lader, P.F.; Olsen, A.; Jensen, A.; Sveen, J.K.; Fredheim, A.; Enerhaug, B. Experimental investigation of the interaction between waves and net structures—Damping mechanism. Aquacult. Eng. 2007, 37, 100–114. [Google Scholar] [CrossRef]
- Lader, P.F.; Jensen, A.; Sveen, J.K.; Fredheim, A.; Enerhaug, B.; Fredriksson, D. Experimental investigation of wave forces on net structures. Appl. Ocean Res. 2007, 29, 112–127. [Google Scholar] [CrossRef]
- Lader, P.; Dempster, T.; Fredheim, A.; Jensen, Ø. Current induced net deformations in full-scale sea-cages for Atlantic salmon (Salmo salar). Aquacult. Eng. 2008, 38, 52–65. [Google Scholar] [CrossRef]
- Dong, G.H.; Zheng, Y.N.; Li, Y.C.; Teng, B.; Guan, C.T.; Lin, D.F. Experiments on wave transmission coefficients of floating breakwaters. Ocean Eng. 2008, 35, 931–938. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Guan, C.T.; Bi, C.W.; Liu, H.F.; Cui, Y. Experimental Investigations on Hydrodynamic Responses of a Semi-Submersible Offshore Fish Farm in Waves. J. Mar. Sci. Eng. 2019, 7, 238. [Google Scholar] [CrossRef] [Green Version]
- Balash, C.; Colbourne, B.; Bose, N.; Raman-Nair, W. Aquaculture net drag force and added mass. Aquacult. Eng. 2009, 41, 14–21. [Google Scholar] [CrossRef]
- Moe-Føre, H.; Lader, P.F.; Lien, E.; Hopperstad, O.S. Structural response of high solidity net cage models in uniform flow. J. Fluids Struct. 2016, 65, 180–195. [Google Scholar] [CrossRef]
- Swift, M.R.; Fredriksson, D.W.; Unrein, A.; Fullertonc, B.; Patursson, O.; Baldwin, K. Drag force acting on biofouled net panels. Aquaclt. Eng. 2006, 35, 292–299. [Google Scholar] [CrossRef]
- Bi, C.W.; Zhao, Y.P.; Dong, G.H.; Wu, Z.M.; Zhang, Y.; Xu, T.J. Drag on and flow through the hydroid-fouled nets in currents. Ocean Eng. 2018, 161, 195–204. [Google Scholar] [CrossRef]
- Li, Y.C.; Zhao, Y.P.; Gui, F.K.; Teng, B. Numerical simulation of the hydrodynamic behavior of submerged plane nets in current. Ocean Eng. 2006, 33, 2352–2368. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Li, Y.C.; Dong, G.H.; Gui, F.K.; Teng, B. Numerical simulation of the effects of structure size ratio and mesh type on three-dimensional deformation of the fishing-net gravity cage in current. Aquacult. Eng. 2007, 36, 285–301. [Google Scholar] [CrossRef]
- Yang, C.K.; Choi, Y.R.; Kim, H.J.; Hong, K. A study on the hydrodynamic behavior of fisheries cages in waves. In Proceedings of the Twelfth International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002; pp. 726–732. [Google Scholar]
- Tsukrov, I.; Eroshkin, O.; Fredriksson, D.W.; Swift, M.R.; Celikkol, B. Finite element modeling of net panels using a consistent net element. Ocean Eng. 2003, 30, 251–270. [Google Scholar] [CrossRef]
- Tsukrov, I.; Eroshkin, O.; Paul, W.; Celikkol, B. Numerical modeling of nonlinear elastic components of mooring systems. IEEE J. Oceanic Eng. 2005, 30, 37–46. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Modelling of current loads on aquaculture net cages. J. Fluids Struct. 2012, 34, 218–235. [Google Scholar] [CrossRef]
- Xu, T.J.; Zhao, Y.P.; Dong, G.H.; Li, Y.C.; Gui, F.K. Analysis of hydrodynamic behaviors of multiple net cages in combined wave-current flow. J. Fluids Struct. 2013, 39, 222–236. [Google Scholar] [CrossRef]
- Fredriksson, D.W.; Swift, M.R.; Eroshkin, O.; Tsukrov, I.; Irish, J.D.; Celikkol, B. Moored fish cage dynamics in waves and currents. IEEE J. Oceanic Eng. 2005, 30, 28–36. [Google Scholar] [CrossRef]
- Lee, C.W.; Kim, Y.B.; Lee, G.H.; Choe, M.Y.; Lee, M.K.; Koo, K.Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Fredriksson, D.W.; DeCew, J.C.; Tsukrov, I.; Swift, M.R.; Irish, J.D. Development of large fish farm numerical modeling techniques with in-situ mooring tension comparisons. Aquacult. Eng. 2007, 36, 137–148. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.C.; Pan, J.Y. Mooring line fatigue: A risk analysis for an SPM cage system. Aquacult. Eng. 2010, 42, 8–16. [Google Scholar] [CrossRef]
- Decew, J.; Tsukrov, I.; Risso, A.; Swift, M.R.; Celikkol, B. Modeling of dynamic behavior of a single-point moored submersible fish cage under currents. Aquacult. Eng. 2010, 43, 38–45. [Google Scholar] [CrossRef]
- Xu, T.J.; Dong, G.H.; Zhao, Y.P.; Li, Y.C.; Gui, F.K. Numerical investigation of the hydrodynamic behaviors of multiple net cages in waves. Aquacult. Eng. 2012, 48, 6–18. [Google Scholar] [CrossRef]
- Théret, F. Etude de l’ équilibre de surfaces reticules places dans un courant uniforme (application aux chalets). Ph.D. Thesis, Université de Nantes, Ecole Centrale de Nantes, Nantes, France, July 1993. [Google Scholar]
- Brebbia, C.A.; Walker, S. Dynamic Analysis of Offshore Structures; Newnes-Butterworths: London, UK, 1979; pp. 109–143. [Google Scholar]
- Choo, Y.I.; Casarella, M.J. Hydrodynamic resistance of towed cables. J. Hydronautics 1971, 5, 126–131. [Google Scholar]
- Fredheim, A.; Faltinsen, O.M. Hydroelastic analysis of a fishing net in steady inflow conditions. In Proceedings of the 3rd International Conference on Hydroelasticity in Marine Technology, University ofOxford, Oxford, UK, 15–17 September 2003. [Google Scholar]
- Wilson, B.W. Elastic characteristics of moorings. J. Waterways Harbors Div. 1967, 93, 27–56. [Google Scholar]
- Gerhard, K. Fiber Ropes for Fishing Gear. FAO Fishing Manuals; Fishing News Books Ltd.: Farnham, UK, 1983; pp. 81–124. [Google Scholar]
- Gui, F.K. Hydrodynamic behaviors of deep-water gravity cage. Ph.D. Thesis, Dalian University of Technology, Dalian, China, May 2006. [Google Scholar]
- Li, Y.C.; Gui, F.K.; Teng, B. Hydrodynamic behavior of a straight floating pipe under wave conditions. Ocean Eng. 2006, 34, 552–559. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Re | 102 | 103 | 104 | 105 | 106 | 5 × 106 |
| CD | 1.0 | 0.41 | 0.39 | 0.52 | 0.12 | 0.18 |
| Component | Parameter | Model Value | Prototype Value |
|---|---|---|---|
| Floaters | Diameter | 2 cm | 1 m |
| Material | Polyethylene | Polyethylene | |
| Total Weight | 185 g | 23.1 t | |
| Submerged weight | 59.2 g | 7.4 t | |
| Net | Height | 0.4 m | 20 m |
| Mesh size | 20 mm | 100 mm | |
| Twine diameter | 1 mm | 5 mm | |
| Material | Polyethylene | Polyethylene | |
| Weight | 454.7 g | 56.8 t | |
| Mooring lines | Diameter | 1.2 mm | 6 cm |
| Density | 1.14 g/cm3 | 1.14 g/cm3 | |
| Length | 1.6 m | 80 m | |
| Material | PP | PP | |
| Sinkers | Weight | 1790 g | 223.75 t |
| Submerged weight | 1560 g | 195 t | |
| Material | Steel | Steel | |
| Anchors | Weight | 3000 g | 375 t |
| Amount | 12 | 12 | |
| Submerged weight | 2000 g | 250 t |
| No. | Model Value | Prototype Value | ||||
|---|---|---|---|---|---|---|
| Wave Height (cm) | Wave Period (s) | Curreent Velocity (cm/s) | Wave Height (m) | Wave Period (s) | Curreent Velocity (m/s) | |
| 1 | 4 | 0.9 | 10 | 2 | 6.4 | 0.7 |
| 2 | 4 | 1.1 | 10 | 2 | 7.8 | 0.7 |
| 3 | 4 | 1.3 | 10 | 2 | 9.2 | 0.7 |
| 4 | 4 | 1.5 | 10 | 2 | 10.6 | 0.7 |
| 5 | 8 | 0.9 | 10 | 4 | 6.4 | 0.7 |
| 6 | 8 | 1.1 | 10 | 4 | 7.8 | 0.7 |
| 7 | 8 | 1.3 | 10 | 4 | 9.2 | 0.7 |
| 8 | 8 | 1.5 | 10 | 4 | 10.6 | 0.7 |
| 9 | 4 | 0.9 | 20 | 2 | 6.4 | 1.4 |
| 10 | 4 | 1.1 | 20 | 2 | 7.8 | 1.4 |
| 11 | 4 | 1.3 | 20 | 2 | 9.2 | 1.4 |
| 12 | 4 | 1.5 | 20 | 2 | 10.6 | 1.4 |
| 13 | 8 | 0.9 | 20 | 4 | 6.4 | 1.4 |
| 14 | 8 | 1.1 | 20 | 4 | 7.8 | 1.4 |
| 15 | 8 | 1.3 | 20 | 4 | 9.2 | 1.4 |
| 16 | 8 | 1.5 | 20 | 4 | 10.6 | 1.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Zhao, Y.-P.; Bi, C.-W.; Cui, Y. Numerical Study on Hydrodynamic Responses of Floating Rope Enclosure in Waves and Currents. J. Mar. Sci. Eng. 2020, 8, 82. https://doi.org/10.3390/jmse8020082
Yang H, Zhao Y-P, Bi C-W, Cui Y. Numerical Study on Hydrodynamic Responses of Floating Rope Enclosure in Waves and Currents. Journal of Marine Science and Engineering. 2020; 8(2):82. https://doi.org/10.3390/jmse8020082
Chicago/Turabian StyleYang, Hui, Yun-Peng Zhao, Chun-Wei Bi, and Yong Cui. 2020. "Numerical Study on Hydrodynamic Responses of Floating Rope Enclosure in Waves and Currents" Journal of Marine Science and Engineering 8, no. 2: 82. https://doi.org/10.3390/jmse8020082
APA StyleYang, H., Zhao, Y. -P., Bi, C. -W., & Cui, Y. (2020). Numerical Study on Hydrodynamic Responses of Floating Rope Enclosure in Waves and Currents. Journal of Marine Science and Engineering, 8(2), 82. https://doi.org/10.3390/jmse8020082