Rudder Roll Stabilization Based on Arc Tangent Nonlinear Feedback for Ships



Abstract
:1. Introduction
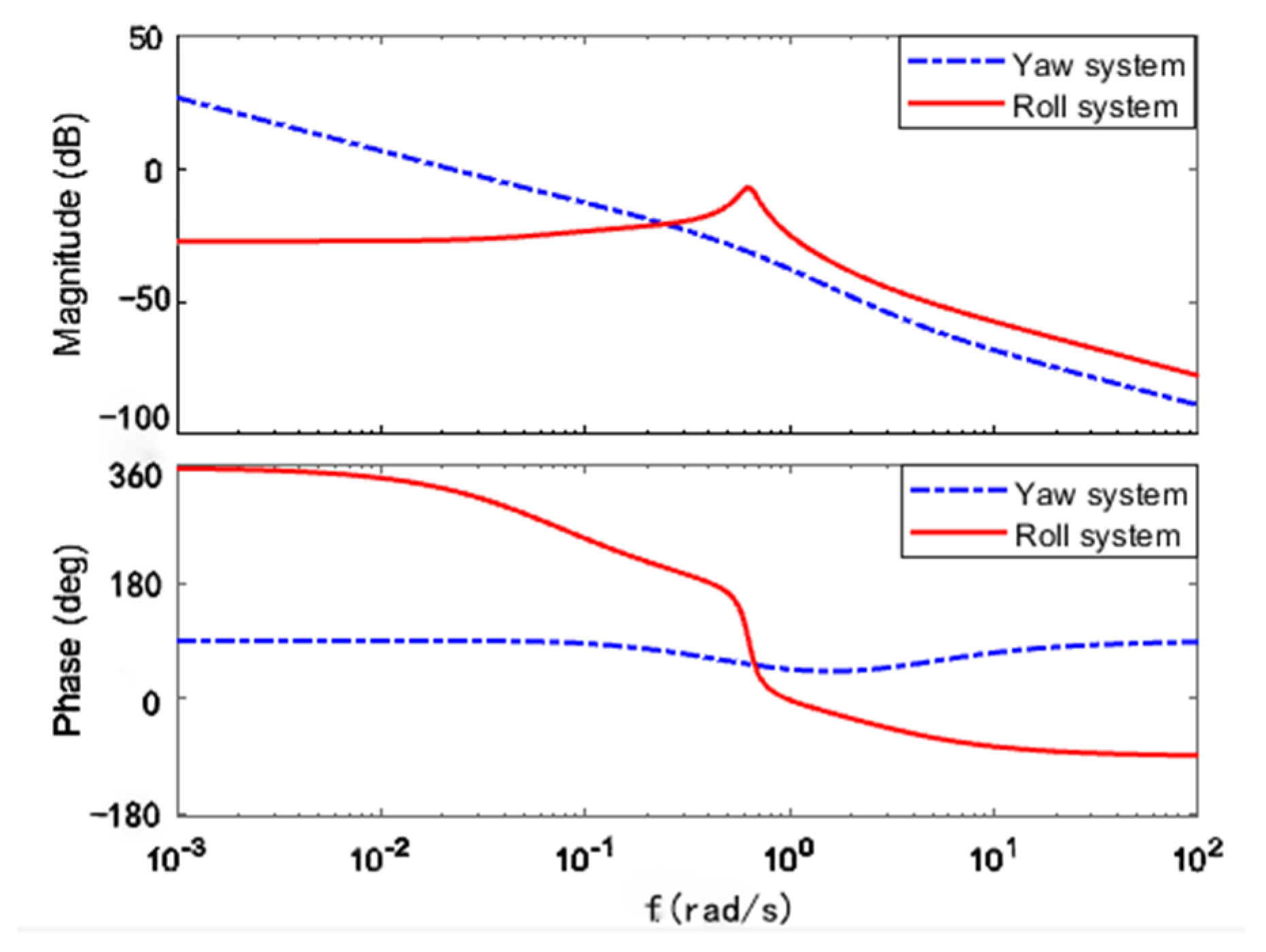
2. Ship Model
3. Controller Design
3.1. Controller Design Based on Pole Assignment
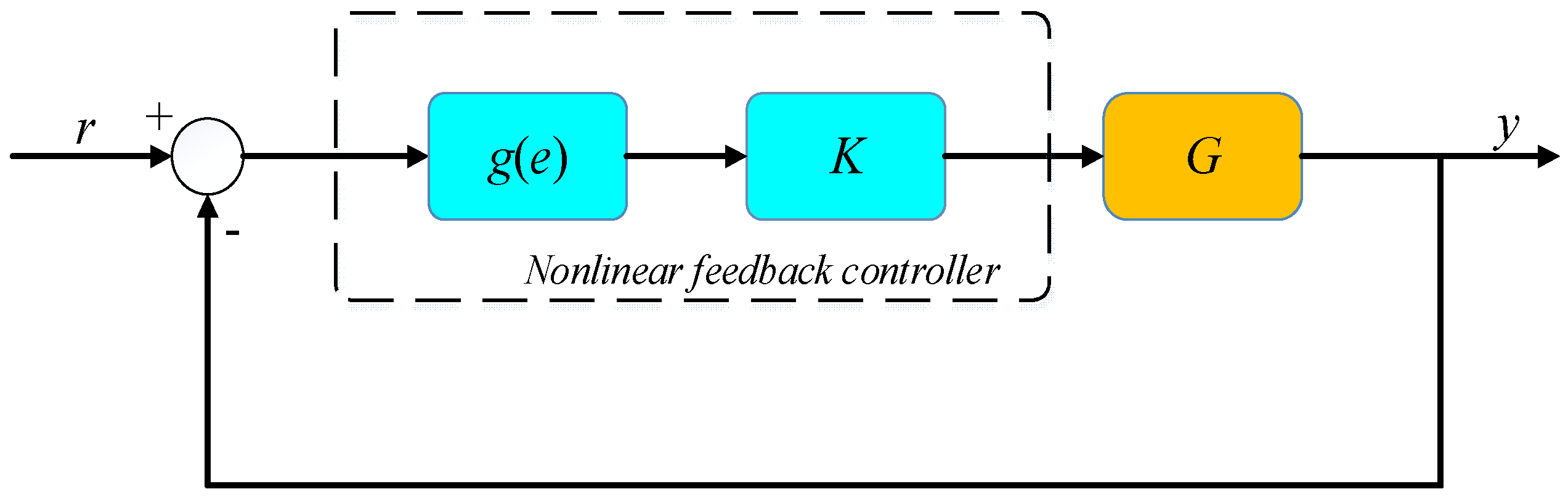
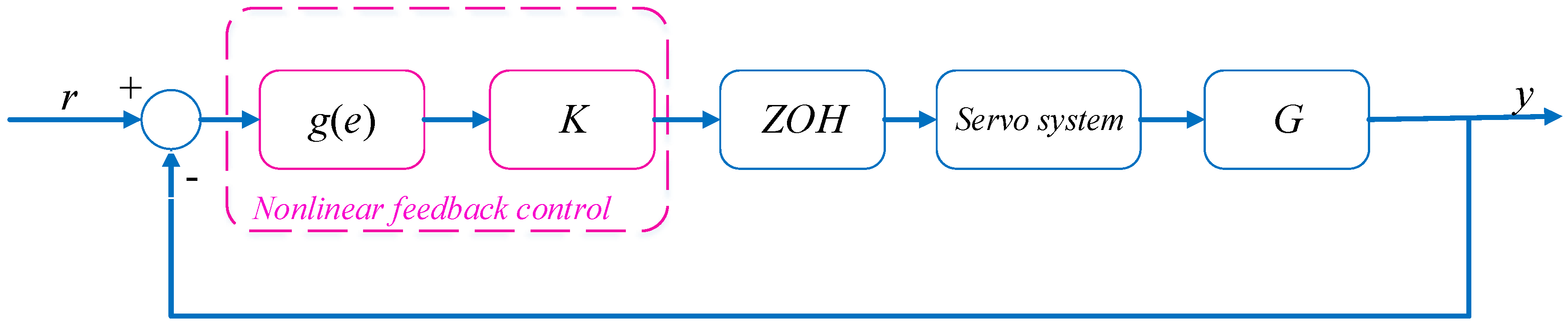
3.2. Nonlinear Feedback Control
3.2.1. Effect on Stability of the System
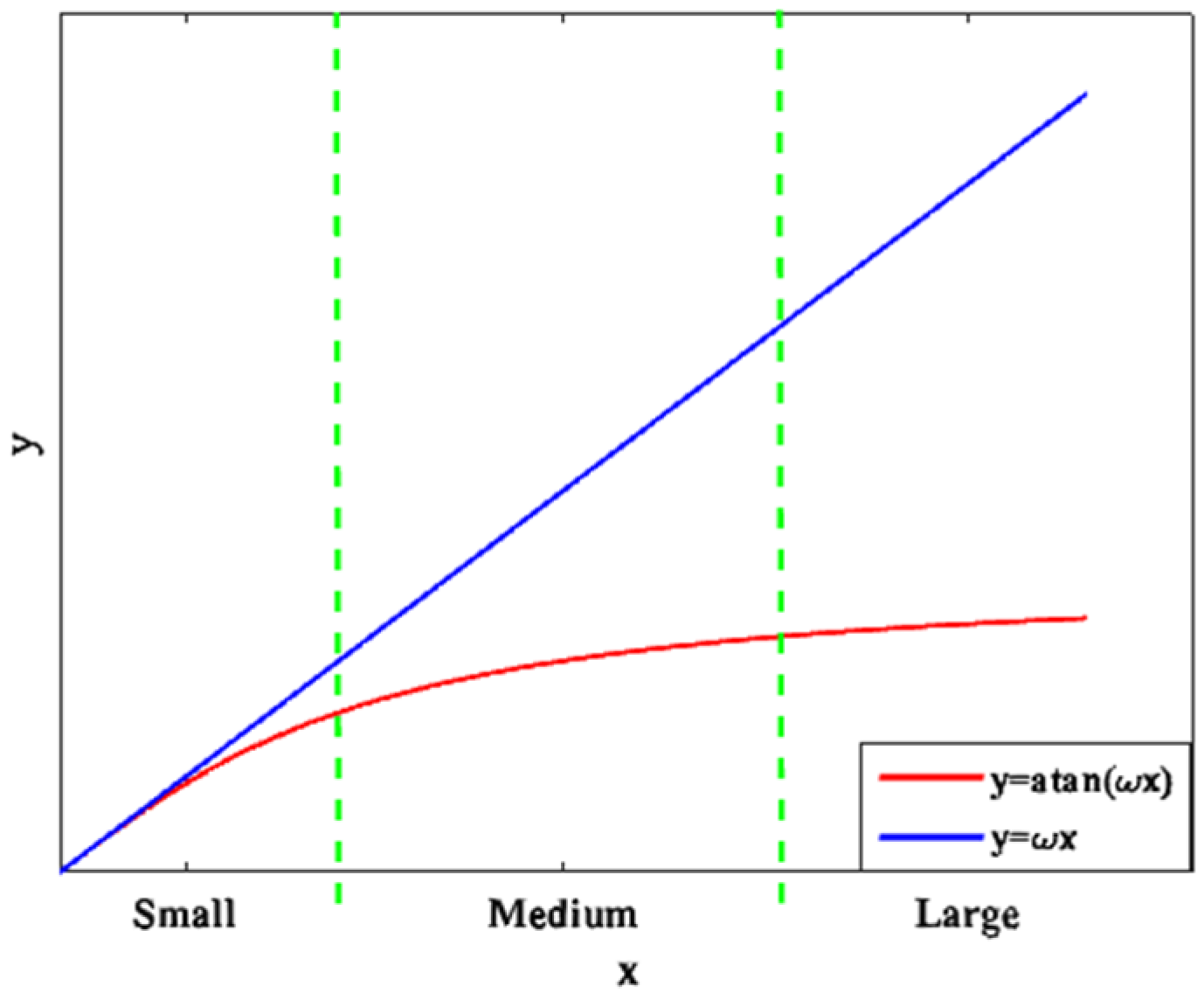
3.2.2. Differences of Nonlinear and Linear Function
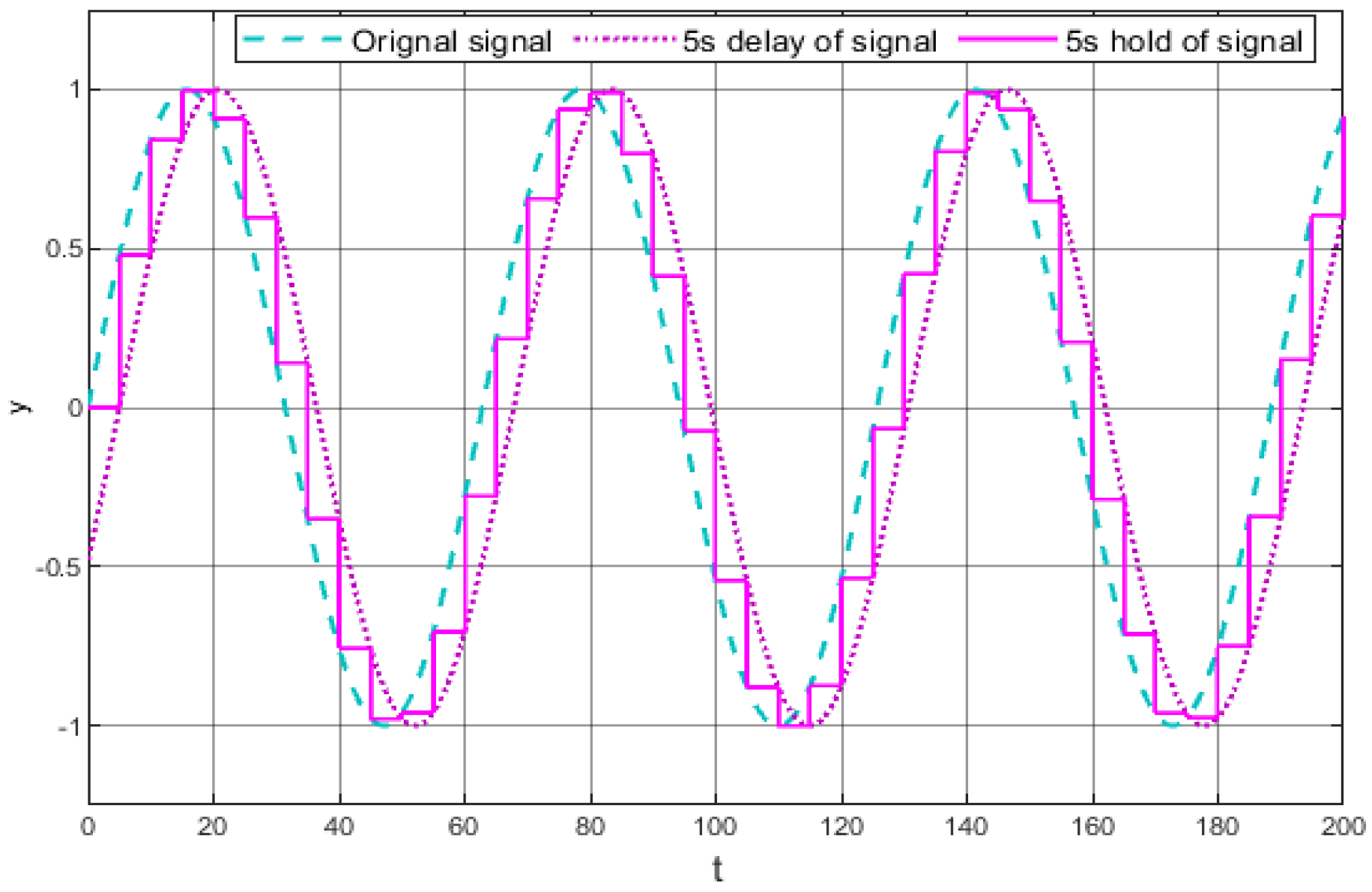
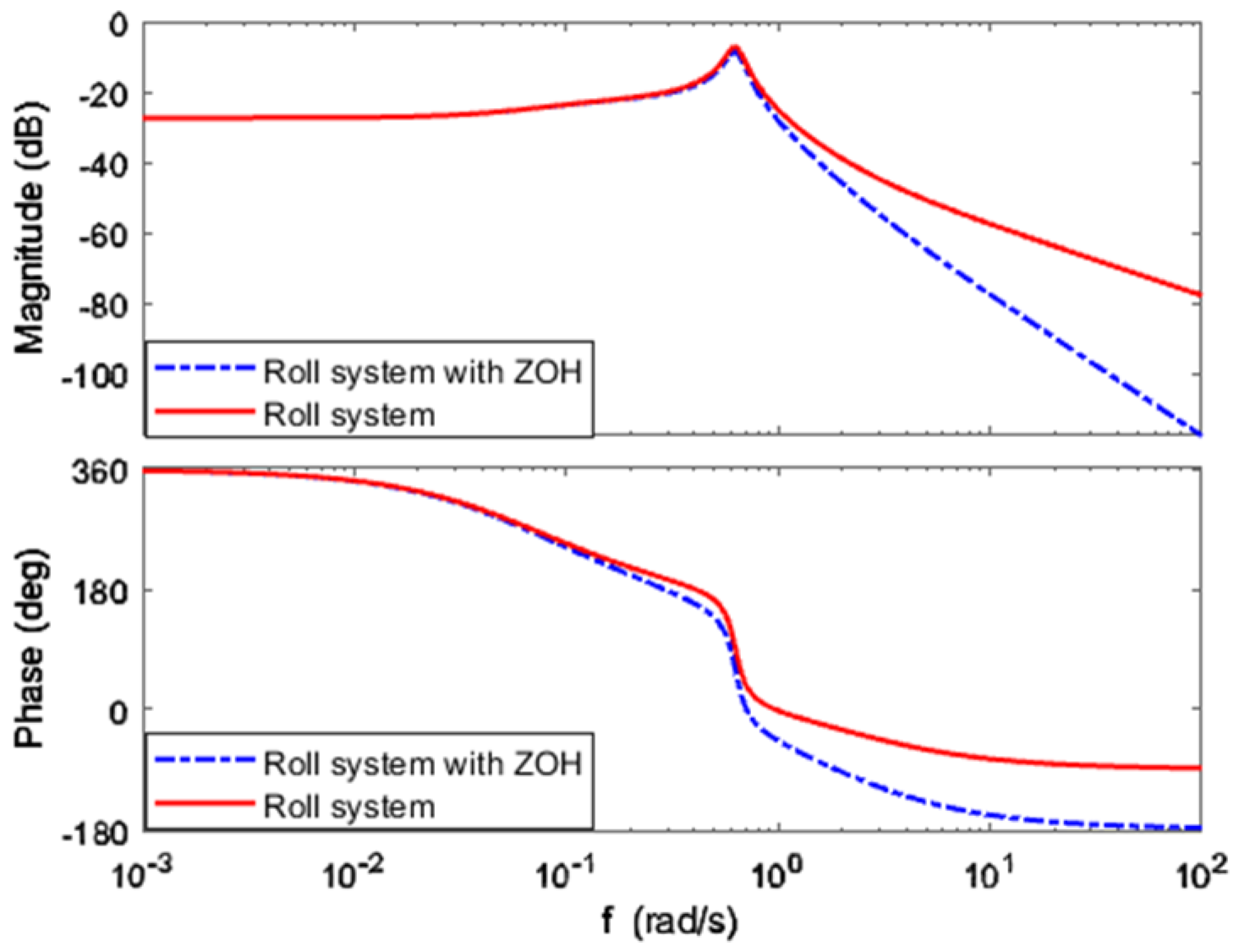
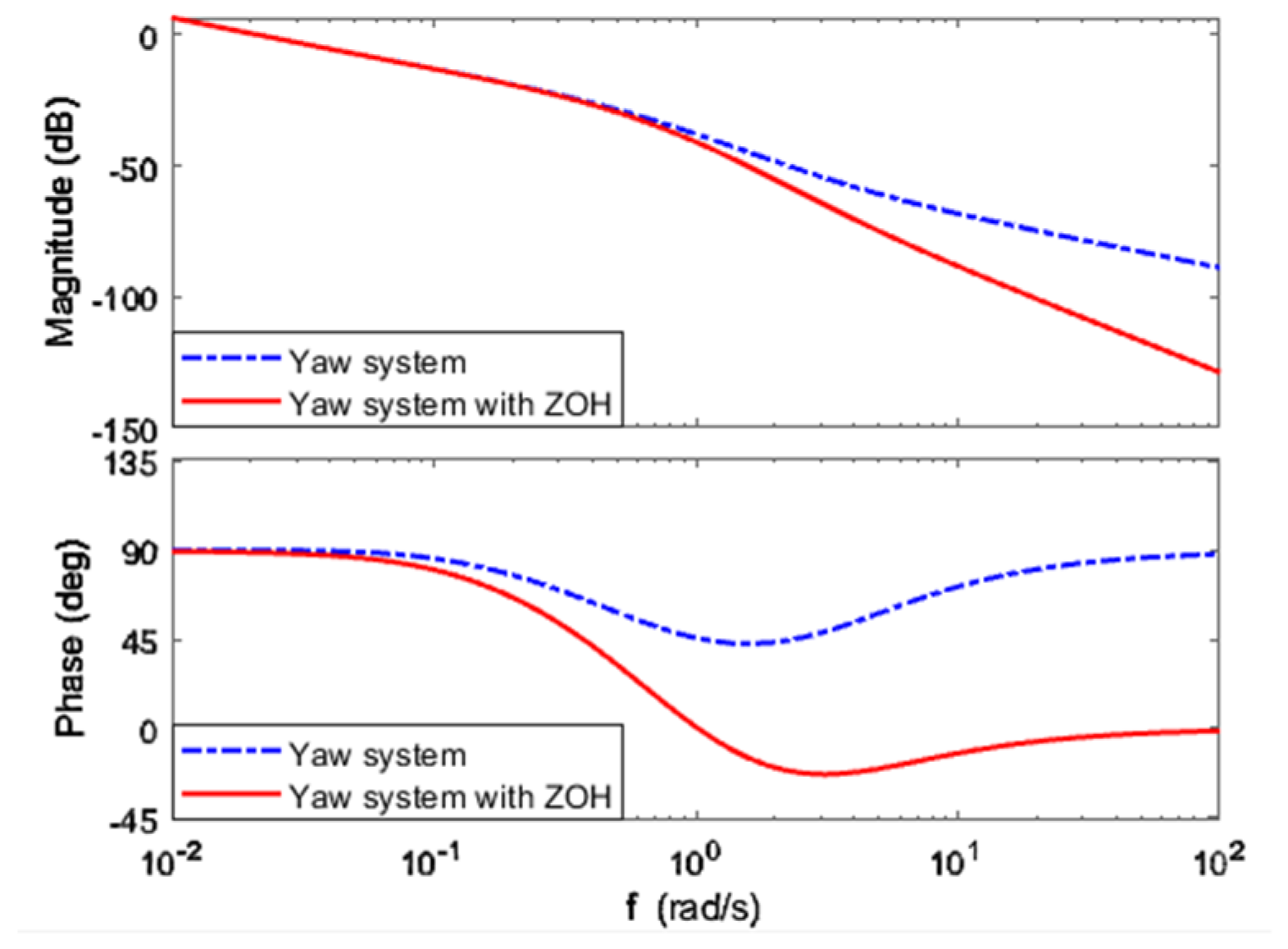
3.2.3. ZOH Component for Lowering Steer Frequency
4. Simulation and Analysis
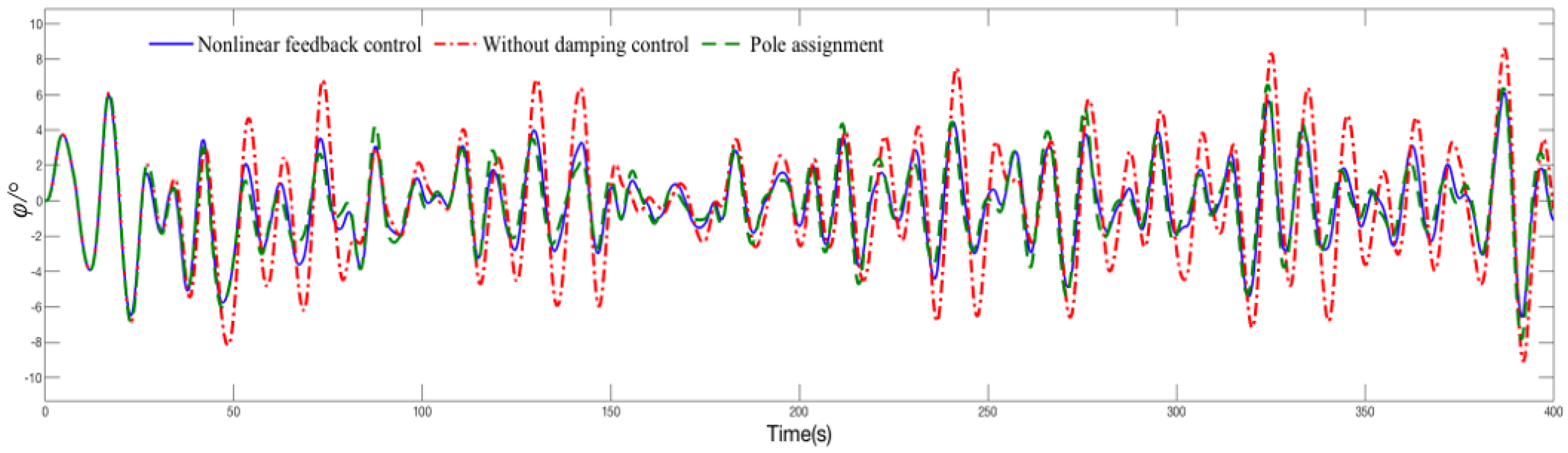
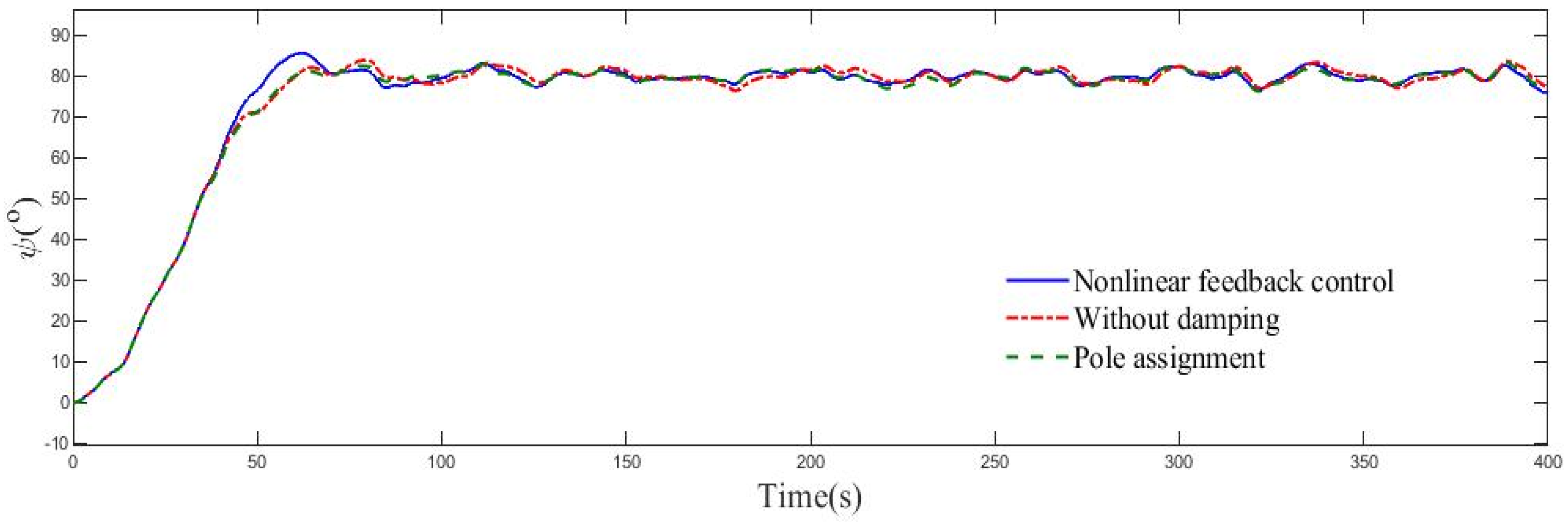
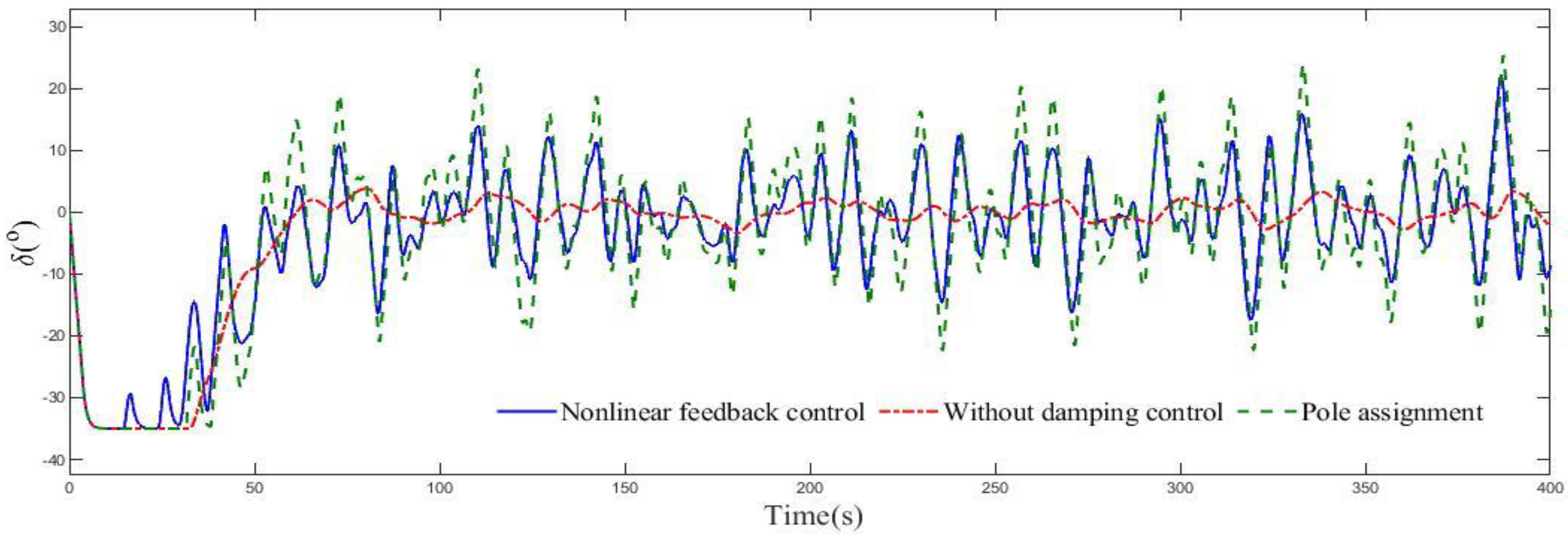
4.1. Performance of the Controller
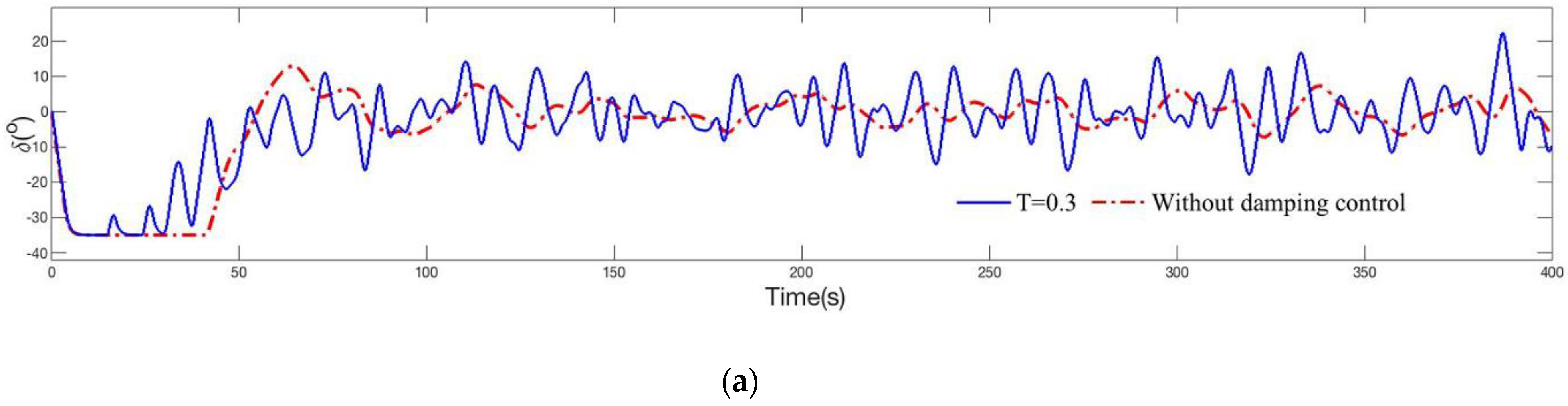
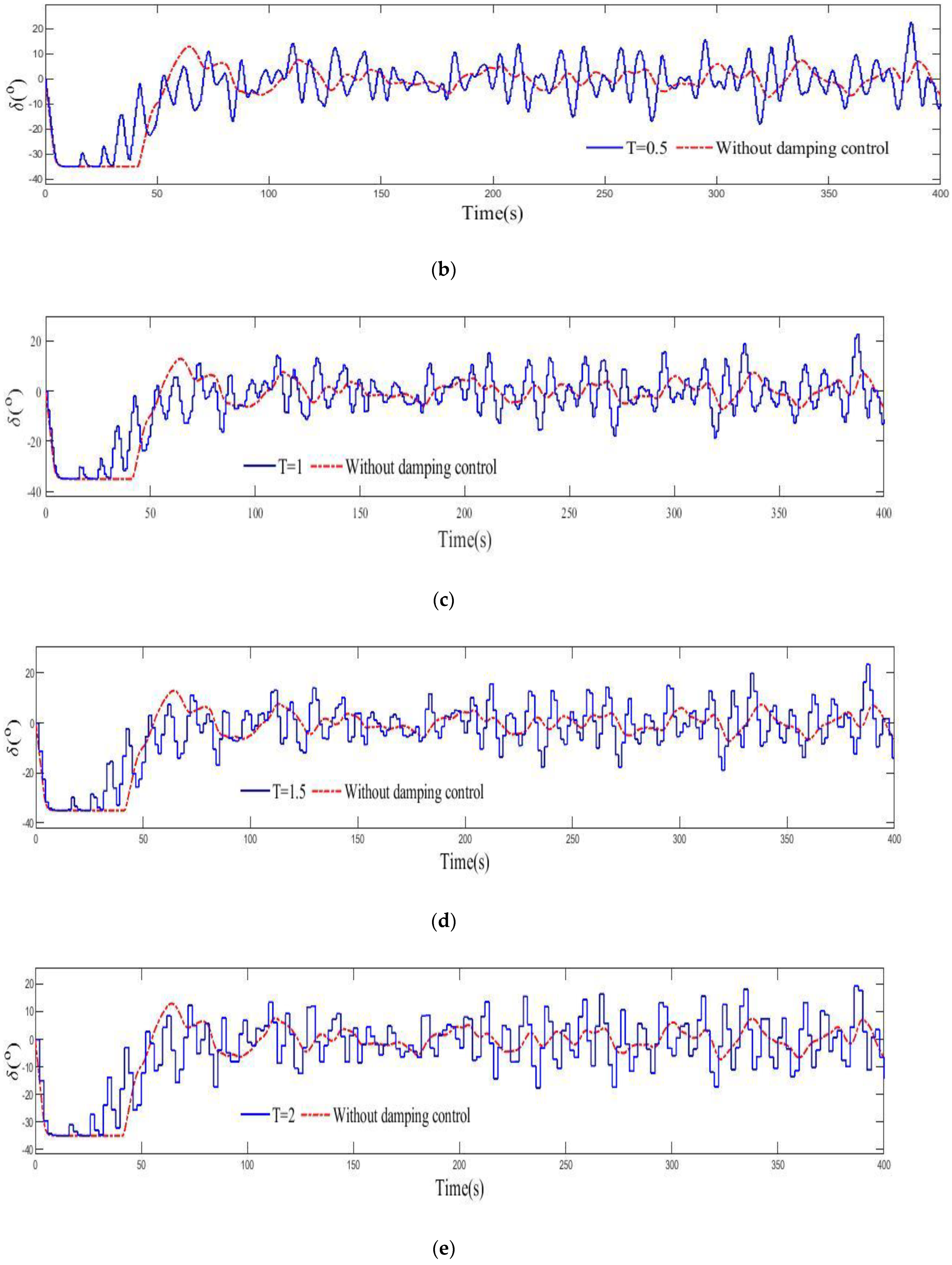
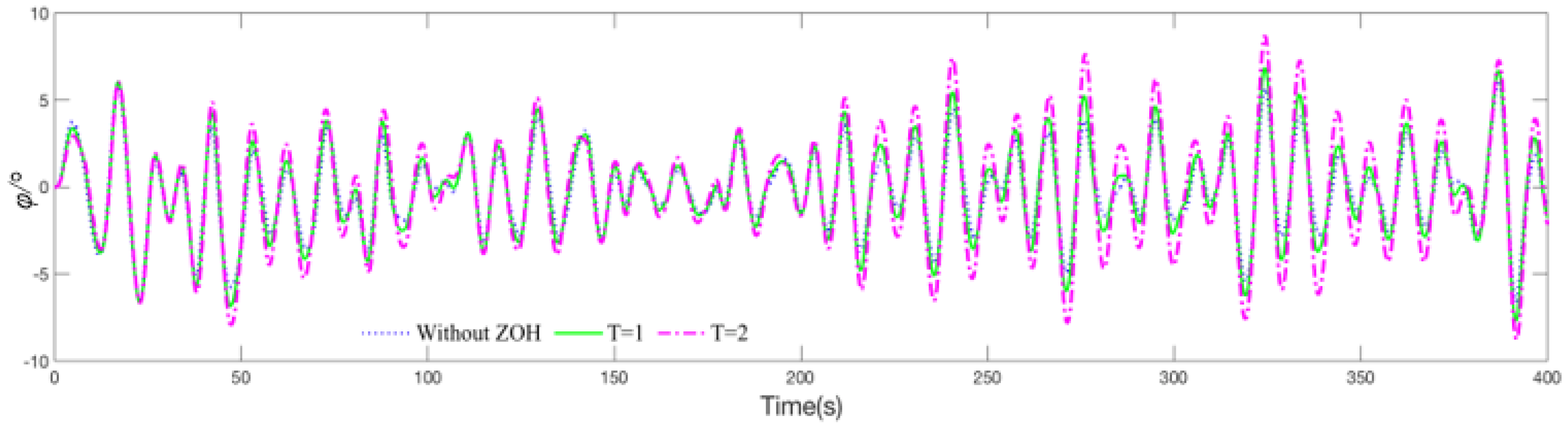
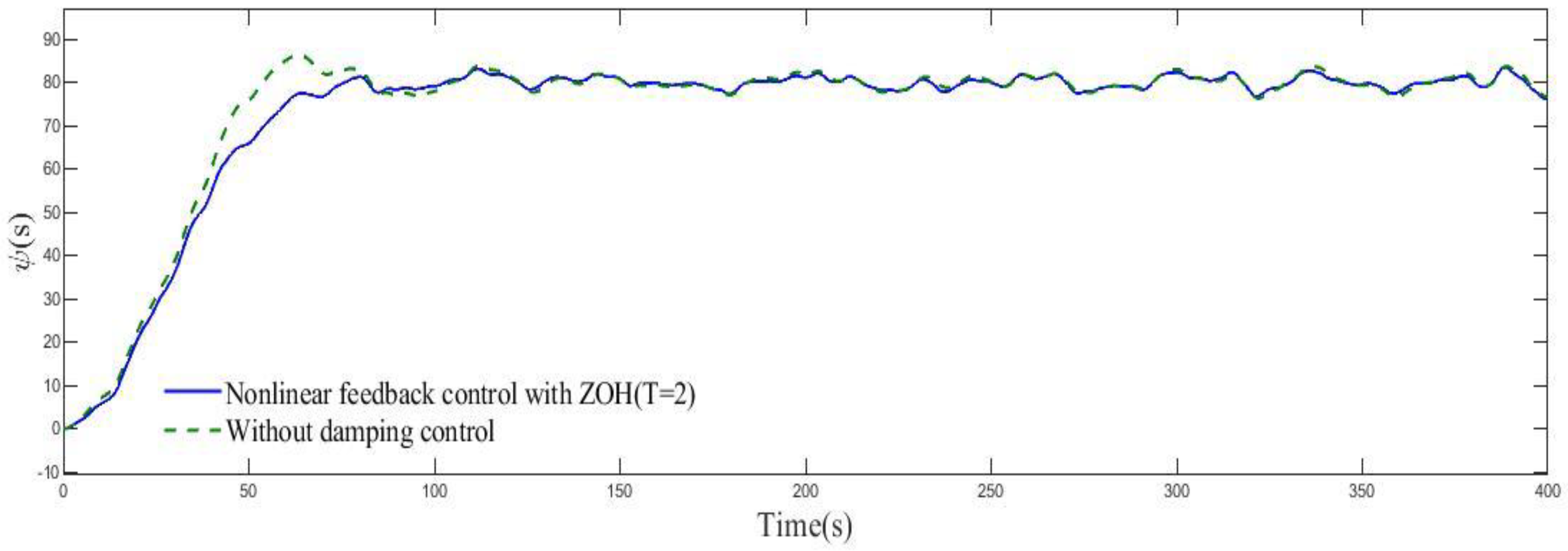
4.2. Effect of Hold Time of ZOH on System
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alujevic, N.; Catipovic, I.; Malenica, S.; Senjanovic, I.; Vladimir, N. Ship roll control and power absorption using a U-tube anti-roll tank. Ocean Eng. 2019, 172, 857–870. [Google Scholar] [CrossRef]
- Marzouk, O.A.; Nayfeh, A.H. Control of ship roll using passive and active anti-roll tanks. Ocean Eng. 2009, 36, 661–671. [Google Scholar] [CrossRef]
- Irkal, M.A.R.; Nallayaraus, S.; Bhattacharyya, S.K. Numerical prediction of roll damping of ships with and without bilge keel. Ocean Eng. 2019, 179, 226–245. [Google Scholar] [CrossRef]
- Hickey, N.A.; Grimble, M.J.; Johnson, M.A.; Katebi, M.R.; Melville, R. Robust fin roll stabilisation of surface ships. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 10–12 December 1997. [Google Scholar]
- Awad, T.M.; Elgohary, A.; Mohamed, T.E. Ship roll damping via direct inverse neural network control system. Alex. Eng. J. 2018, 57, 2951–2960. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, H.D. Rudder Roll Damping Autopilot Using Dual Extended Kalman Filter Trained Neural Networks for Ship in Waves. J. Mar. Sci. Appl. 2019, 18, 510–521. [Google Scholar] [CrossRef]
- Wang, Y.; Chai, S.; Khan, F.; Nguyen, H. Unscented Kalman Filter trained neural networks based rudder roll stabilization system for the ship in waves. Appl. Ocean Res. 2017, 68, 26–38. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, H.D.; Chai, S. Radial basis function neural network based rudder roll stabilization for ship sailing in waves. In Proceedings of the 2015 5th Australian Control Conference (AUCC 2015), Gold Coast, Australia, 5–6 November 2015. [Google Scholar]
- Nguyen, P.; Jung, Y. Neural Network Based Rudder-Roll Damping Control System for Ship. J. Korean Navig. Port Res. 2007, 31, 289–293. [Google Scholar] [CrossRef]
- Wang, S.K.; Jin, H.Z. Nonlinear non-minimum phase rudder-roll damping systems of ship using sliding mode control. Comput. Eng. Appl. 2018, 54, 207–212. [Google Scholar]
- Zhou, L.M.; Wang, Y.L. Robust H∞ Control of Rudder Roll Damping for Ships. Control Eng. Chin. 2016, 23, 102–108. [Google Scholar]
- Jin, H.Z.; Pan, L.X.; Wang, L.L. Modified variable structure control in rudder roll damping of submarine near free-surface. J. Harbin Inst. Technol. 2019, 42, 1462–1466. [Google Scholar]
- Kapitanyuk, Y.A.; Proskurnikov, A.V.; Cao, M. Optimal controllers for rudder roll damping with an autopilot in the loop. In Proceedings of the 10th IFAC Conference on Control Applications in Marine Systems (CAMS), Trondheim, Norway, 13–16 September 2016. [Google Scholar]
- Zhang, X.K.; Zhang, G.Q. Design of ship course-keeping autopilot using a sine function based nonlinear feedback technique. J. Navig. 2016, 69, 246–256. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Zhang, X.K. Ship nonlinear-feedback course keeping algorithm based on MMG model driven by bipolar sigmoid function for berthing. Int. J. Nav. Arch. Ocean 2017, 9, 525–536. [Google Scholar] [CrossRef]
- Zhang, X.K.; Yang, G.P.; Zhang, Q.; Zhang, G.Q.; Zhang, Y.Q. Improved concise backstepping control of course-keeping for ships using nonlinear feedback technique. J. Navig. 2017, 70, 1401–1414. [Google Scholar] [CrossRef]
- Zhang, X.K.; Zhang, Q.; Ren, H.X. Linear Reduction of Backstepping Algorithm Based on Nonlinear Decoration for Ship Course-keeping Control System. Ocean Eng. 2018, 147, 1–8. [Google Scholar] [CrossRef]
- Cao, J.; Zhang, X.; Zou, X. Pressure Control of Insulation Space for Liquefied Natural Gas Carrier with Nonlinear Feedback Technique. J. Mar. Sci. Eng. 2018, 6, 133. [Google Scholar] [CrossRef] [Green Version]
- Jia, X.L.; Yang, Y.S. Mathematical Model of Ship Motion—Mechanism Modeling and Identification Modeling; Dalian Maritime University Press: Dalian, China, 1999. [Google Scholar]
- Klugt, P. Rudder Roll Stabilization. Ph.D. Thesis, Electrical Engineering, Mathematics and Computer Science, Delft University of Technology, Delft, The Netherlands, 1987. [Google Scholar]
- Zhang, S.Y.; Gao, Q.L. Modern Control Theory; Tsinghua University Press: Beijing, China, 2006; pp. 172–173. [Google Scholar]
- Lei, Z.L.; Guo, C. Disturbance rejection control solution for ship steering system with uncertain time delay. Ocean Eng. 2015, 95, 78–83. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hold Time (s) | Steer Frequency (Times/s) | Reduction of Damping Ratio |
|---|---|---|
| 0.3 | 3 | 30.3% |
| 0.5 | 2 | 27.0% |
| 1 | 1 | 21.2% |
| 1.5 | 0.7 | 15% |
| 2 | 0.5 | 3.6% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Liang, C.; Zhang, X. Rudder Roll Stabilization Based on Arc Tangent Nonlinear Feedback for Ships. J. Mar. Sci. Eng. 2020, 8, 245. https://doi.org/10.3390/jmse8040245
Zhao J, Liang C, Zhang X. Rudder Roll Stabilization Based on Arc Tangent Nonlinear Feedback for Ships. Journal of Marine Science and Engineering. 2020; 8(4):245. https://doi.org/10.3390/jmse8040245
Chicago/Turabian StyleZhao, Jian, Cailei Liang, and Xianku Zhang. 2020. "Rudder Roll Stabilization Based on Arc Tangent Nonlinear Feedback for Ships" Journal of Marine Science and Engineering 8, no. 4: 245. https://doi.org/10.3390/jmse8040245
APA StyleZhao, J., Liang, C., & Zhang, X. (2020). Rudder Roll Stabilization Based on Arc Tangent Nonlinear Feedback for Ships. Journal of Marine Science and Engineering, 8(4), 245. https://doi.org/10.3390/jmse8040245