1. Introduction
It is indisputable that the ocean is rich in oil, natural gas, minerals, and marine living resources. It was reported in the 2018 Blue mining Public Report that the global demand for materials, such as cobalt, nickel, lithium, and copper, will increase ten- to hundred-fold in the foreseeable future. However, the prerequisite for the development of these resources is the ability to grasp the marine data of relevant sea areas. At the same time, observing various ocean phenomena is also a prerequisite for us to be able to forecast the ocean climate. Observations of seafloor crustal movement, seafloor earthquakes, warmness and salinity of ocean water, dissolved oxygen, carbon cycle, and the resulting ocean circulation can help us to take corresponding countermeasures early in the face of natural disasters, and may help us to avoid or reduce economic losses. In the interior of the ocean, due to the inconsistency of the salinity and temperature in various places, the density of seawater in different water areas or depths is also inconsistent. It is very important to understand the physical information of the ocean for the navigation of warships, especially submarines. If a submarine inadvertently drives into less dense waters from denser waters without taking corresponding measures, the submarine will dive violently, resulting in a sudden increase of the pressure on it, which is likely to cause the submarine to collapse, taking the lives of its crew members. Therefore, observing and mastering marine information is of great significance to the marine economy, marine climate forecast, and marine military.
In addition to having abundant resources, the ocean also contains tremendous energy. Human beings have been working hard to develop and utilize this energy and have done a lot of work on it. Simeon Doyle et al. discussed the potential of M-OWC (multi-oscillating water columns) and the improvements they can bring to the OWC (oscillating water column) principle, in order to increase capture efficiency. Thus, M-OWC has the potential to provide encouraging results and support the further development of wave energy development [
1].
Buoy-based observation systems can continuously observe a specific sea area over a long time. With a set of corresponding deployment and recovery equipment, the observation platform can migrate flexibly to obtain long-term, wide-range, and high-precision marine scientific data. Therefore, at present, in the field of marine meteorological forecast and marine military, buoys and submarine observation networks are mainly used to obtain marine data.
Buoy-based ocean observation platforms are mainly composed of buoys, seafloor nodes, mooring cables, and deployment recovery devices. They are equipped with different observation instruments, from sea surface to seafloor. Therefore, the power supply and communication systems should be redesigned, according to the observation needs of the system. The mooring technology of the buoy is directly related to the survival of the entire observation platform.
There are three typical mooring methods for buoys: chain-catenary mooring, semi-taut mooring, and inverse-catenary mooring [
2]. The factors that determine the type of mooring include the depth of deployed waters, cost factors, the deployment strategy, and so on.
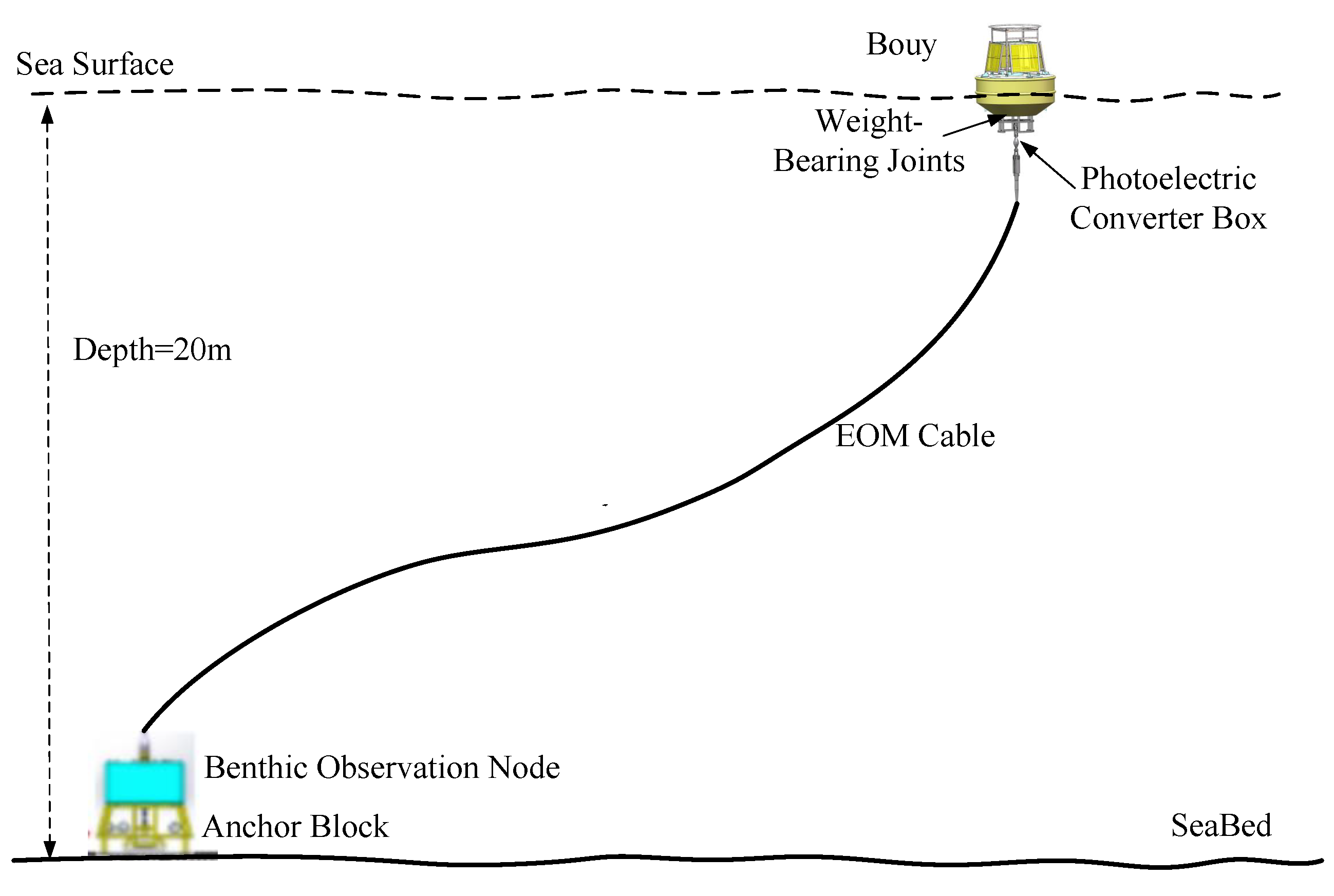
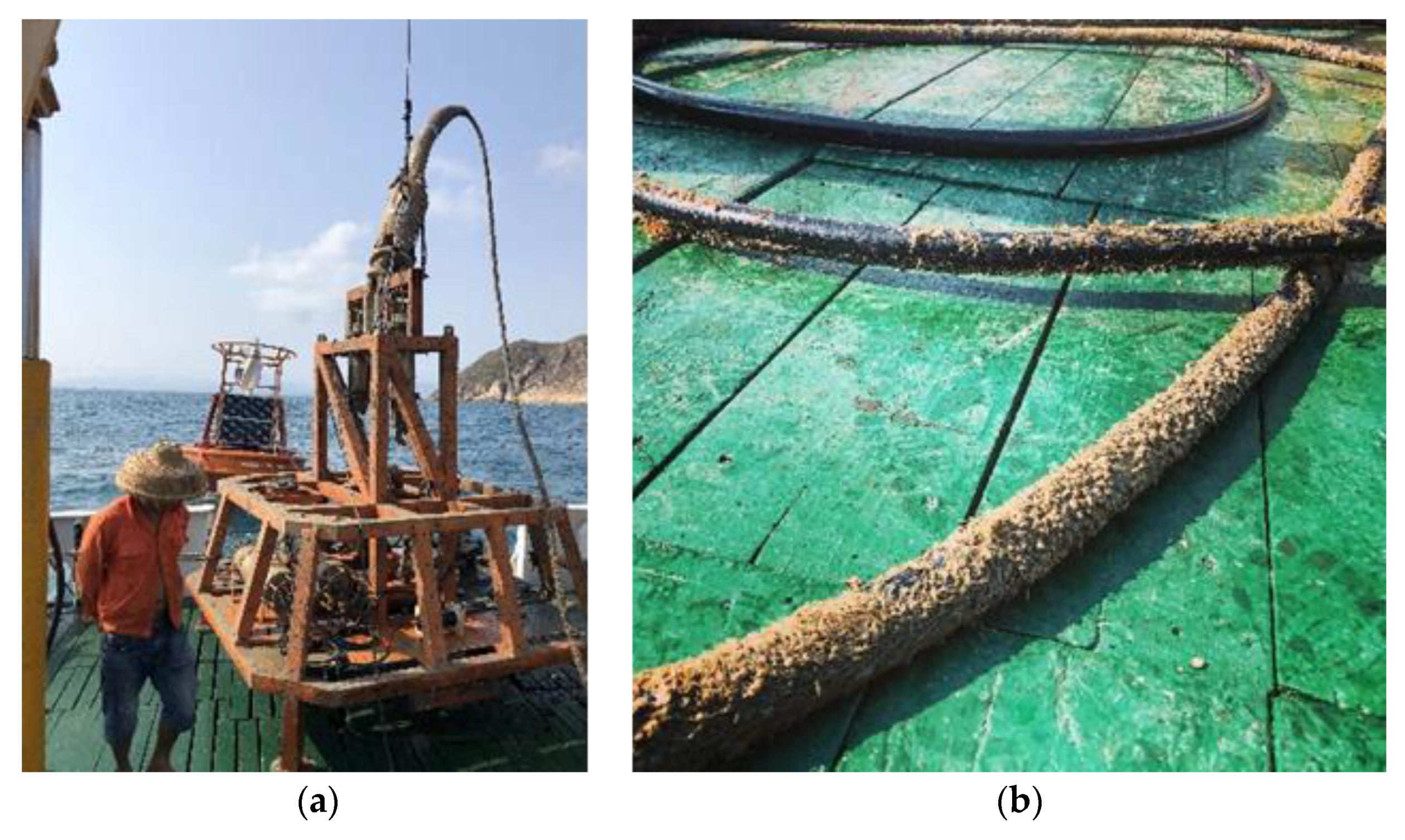
Catenary mooring is mainly used in shallow water, and its configuration is also the simplest. As shown in
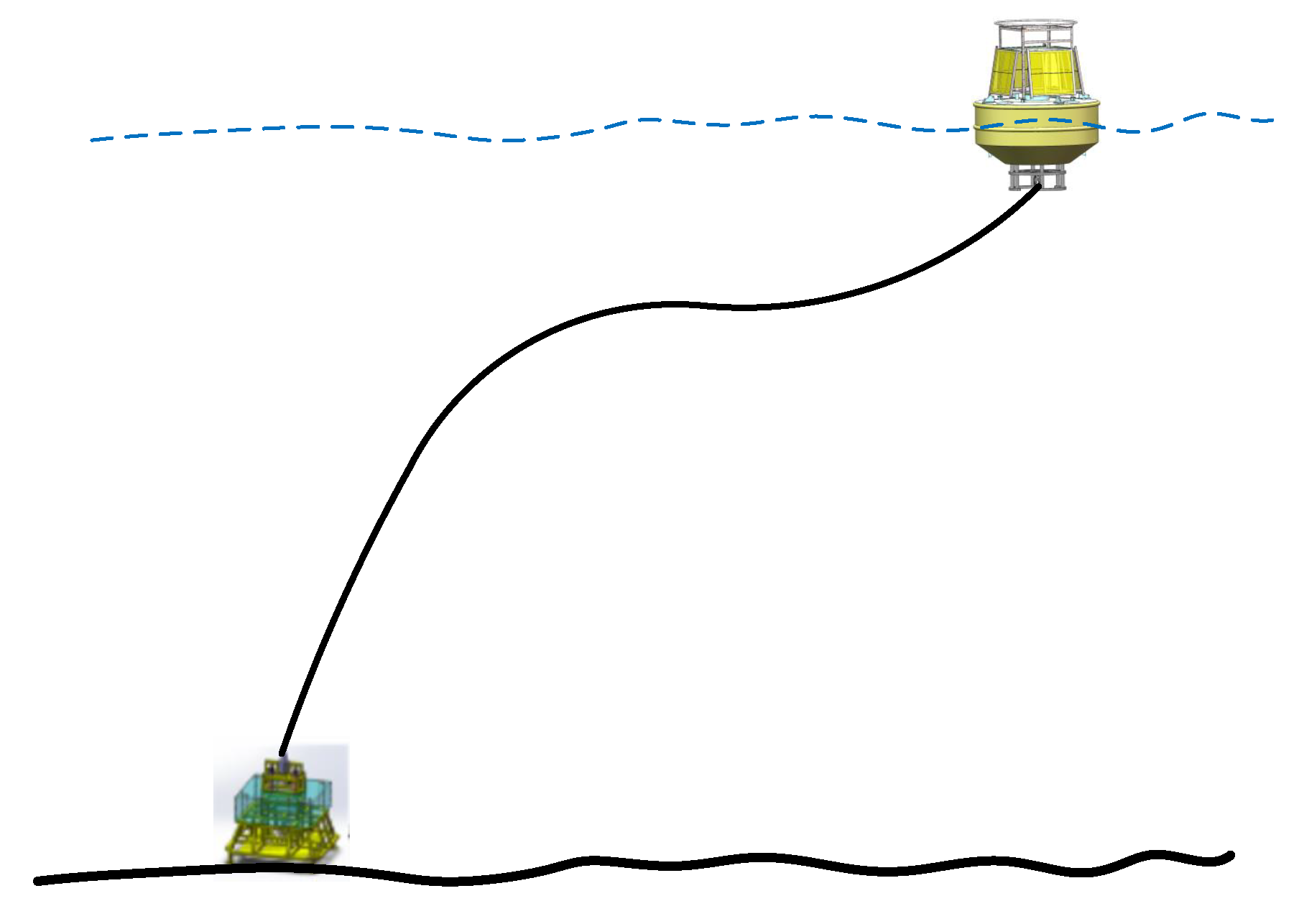
Figure 1a, a mooring chain is usually used as the mooring string when the water depth is lower than 50 m; when the water is deeper, the upper part of the mooring chain is usually replaced by a cable to reduce its weight, as shown in
Figure 1b. The cost of this kind of mooring configuration is low, but it can only be placed in shallow water and it is difficult for this mooring configuration to resist strong wind and waves; it is also harmful to the ecosystem of the seabed, as the mooring chain is in contact with the seabed.
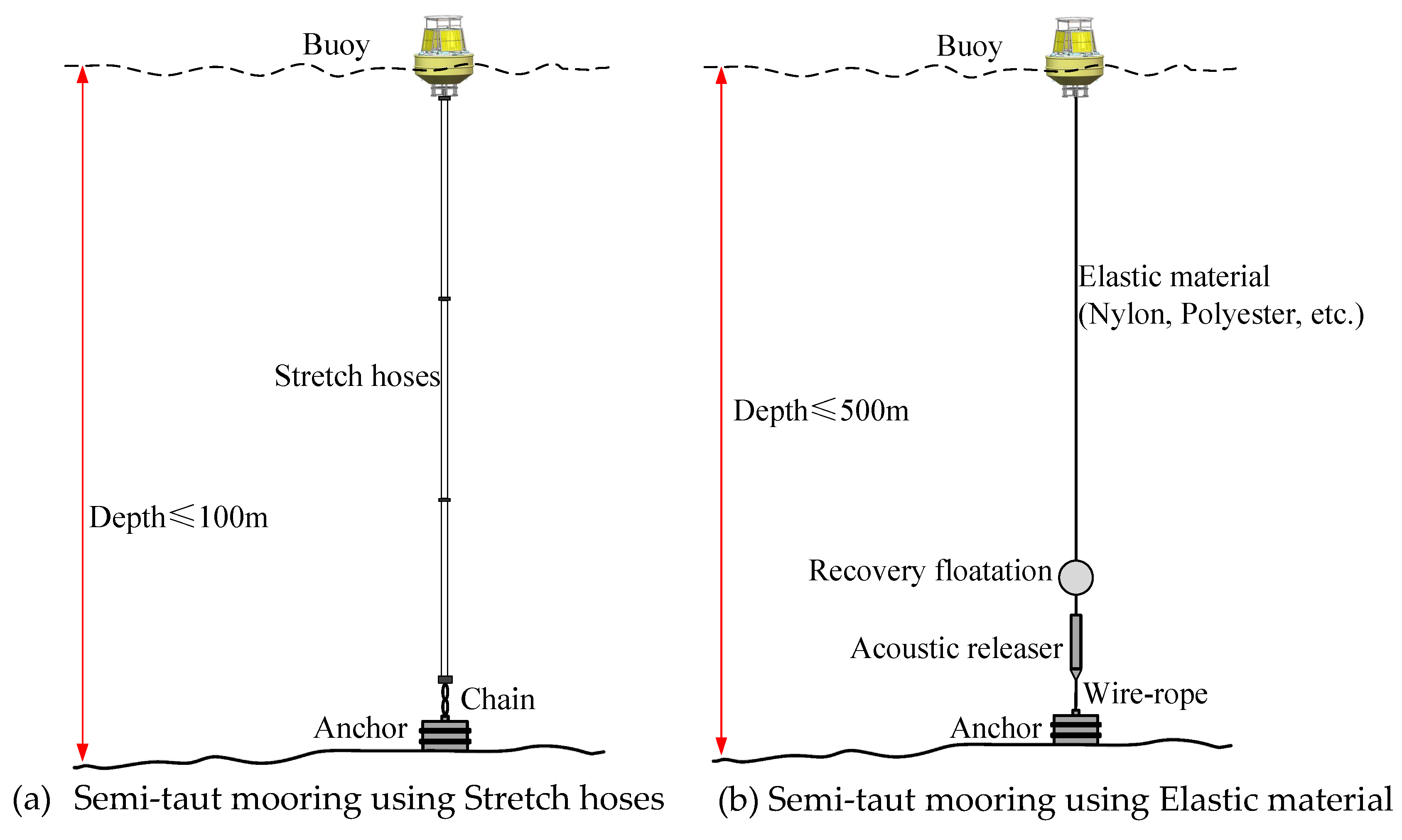
A semi-taut mooring system moors the buoy on the sea surface using an elastic mooring string, as shown in
Figure 2. The mooring string is usually made of nylon, polyester, and polypropylene. The bottom of the semi-taut mooring system is not contact with the seabed, thus having little impact on the marine ecological environment. However, it is necessary to know the water depth before laying a semi-taut mooring system, as the length of the mooring chain needs to be determined according to the water depth, such that the mooring string always maintains a certain tension. According to the requirements of the whole system, some sensors (e.g., CTD (conductivity temperature depth), ADCP (acoustic doppler current profilers), and so on) may be installed in the middle of the mooring string. A float and acoustic releaser are usually installed at the lower part of the mooring string, to facilitate the recovery of mooring string and the observation instruments.
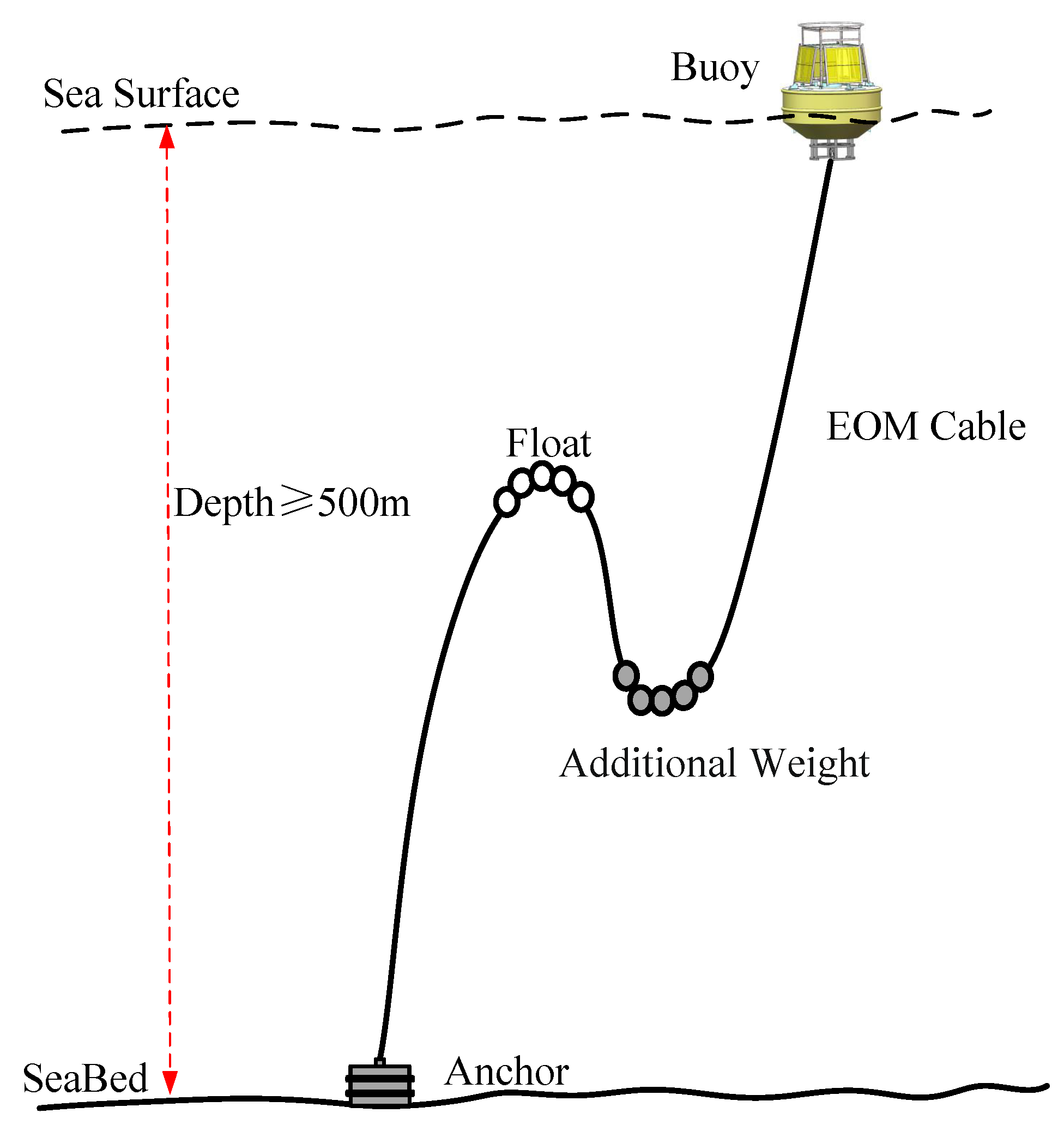
The most significant feature of inverse-catenary moorings is that the middle section of the mooring string has the shape of an ‘S’, as shown in
Figure 3. There is not much difference of the mooring design for differing sea water densities. Common materials are polyolefin, polyester, and nylon. This type of mooring system is usually deployed in waters with a depth greater than 500 m. It can resist the impact of high-velocity currents and has high survivability in extreme marine environments. It is suitable for deployment in deep seas, but requires a longer mooring chain, its assembly is more difficult, and this type of mooring system is more costly.
Many scholars have studied the mooring technology of floating structures. Imanol Touzon et al. analyzed the numerical results of applying three different well-known mooring design methods to floating wave energy converters moored by four catenaries. The simulation was carried out under extreme environmental conditions. After analyzing the simulation results, it was found that the wire tension is greatly affected by resistance and inertial force. The author believed that this effect comes from the sudden load caused by the fluctuation of the float [
3]. Sergej Antonello Sirigu et al. experimentally studied the mooring system of a wave energy converter, where the influence of the mooring layout on loads in extreme wave conditions was the focus of the research. The peak load of the mooring system was reduced by changing the configuration of the mooring system [
4]. Magnus Thorsen Bach-Gansmo et al. presented the dynamic behavior and line loads of a FOWT (Floating offshore wind turbines). They used physical experiments and numerical codes to investigate the mooring and floater response when moored with elastic mooring lines. The influence of the mooring line angles and the pretension in the mooring line of the mooring system was studied experimentally [
5].
Many scholars have studied the mooring technology of floating structures. Imanol Touzon et al. analyzed the numerical results of applying three different well-known mooring design methods to floating wave energy converters moored by four catenaries. The simulation was carried out under extreme environmental conditions. After analyzing the simulation results, it was found that the wire tension is greatly affected by resistance and inertial force. The author believed that this effect comes from the sudden load caused by the fluctuation of the float [
3]. Sergej Antonello Sirigu et al. experimentally studied the mooring system of a wave energy converter, where the influence of the mooring layout on loads in extreme wave conditions was the focus of the research. The peak load of the mooring system was reduced by changing the configuration of the mooring system [
4]. Magnus Thorsen Bach-Gansmo et al. presented the dynamic behavior and line loads of a FOWT (Floating offshore wind turbines) They used physical experiments and numerical codes to investigate the mooring and floater response when moored with elastic mooring lines. The influence of the mooring line angles and the pretension in the mooring line of the mooring system was studied experimentally [
5].
CUMAS (Cabled Underwater Module for Acquisition of Seismological data) was designed to extend the land surveillance network towards the wide marine sector of calderas, as shown in [
6,
7]. The system was deployed within 100 m of depth. The system is located at the Campi Flegrei caldera (southern Italy), one of the most hazardous and populated volcanic areas in the world. The scientific sensors include a seismometer, hydrophone, ocean current meter, and water thermometer. The MBARI Ocean Observatory System (MOOS) prototype, which is shown in [
8,
9,
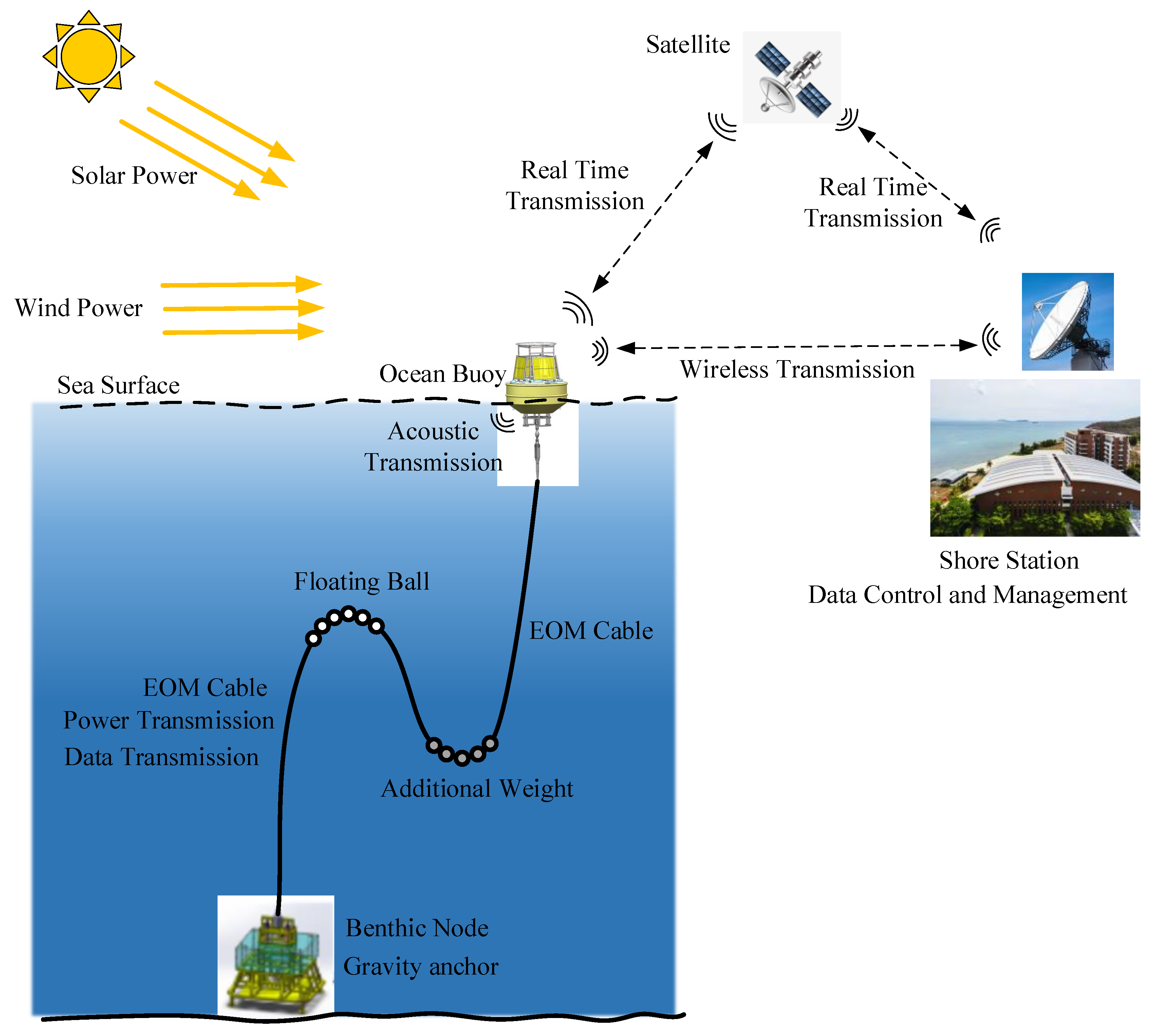
10], utilizes an EOM cable to deliver power from the buoy to the seafloor instruments, realize communication between the instruments and the buoy, and which can be deployed in the deep ocean (up to 4000 m depth). The surface buoy collects solar and wind energy, where horizontal axis wind turbines and solar panels are utilized for power collection. The wind turbine has a rotor diameter of 1.2 m with 300 W output in 12.5 m/s wind. The actual power is 60 W, which depends on the wind speed. The wind turbine and solar provide 48 V DC power bus for the battery. Through a DC–DC Converter, the system provides 12 V DC for the buoy equipment and 375 V DC for the ocean benthic instruments.
Satellite communication offers a low-bandwidth path for buoys, while optical fiber communication provides a high-bandwidth path from the seafloor to sea surface; for example, through an EOM cable. The cable utilized in the MOOS system is different from that in the seafloor observation network. The traditional EOM cables utilized in seafloor networks are armored EOM cable, which lie on the sea bottom statically. An armored EOM cable is not suitable for deep sea buoy mooring, however. The EOM cable has to be designed to have net buoyancy, in order for it to hang in the water for a long time. This kind of EOM cable requires high strength, excellent bending property, watertight performance, and wear resistance. Vectran fibers, nylon, and polyester are generally selected as the strength material. The properties of EOM cables with different strength materials have been compared in [
11,
12,
13,
14], especially the properties of the static and dynamic responses of mooring EOM cables.
The tether technology is generally implemented in shallow ocean areas, as shown in [
6,
7], where the anchoring rope and coaxial copper conductors are roped together as the mooring component [
13,
15], such that the coaxial cable does not have to be pulled. The analog signals are transmitted by the coaxial cable and transferred to digital signals by the A/D converter at the buoy and seafloor. This kind of mooring method is difficult to utilize in deep sea, however, as it is hard to launch and recover the system in such conditions, while the anchor chain and cable are entangled together.
DEOS (Dynamics of Earth and Ocean Systems) [
16] provides the design concept of the moored buoy observatory, which is comprised of a cable link and a high-bandwidth observatory employing a discus buoy, where the buoy uses an electro-optic cable to connect the seafloor and moored instruments to the surface. The C-Band satellite telemetry system is utilized in DEOS with continuous high-bandwidth communication (64–128 kbps or higher). The buoy is equipped with a diesel generator to supply enough power (up to 1000 W) for the benthic node. Acoustic communication was selected to construct the link between the surface and seafloor. A solar-powered, low-power satellite telemetry system delivers ~5 Mbyte data to shore. The prototype system of Cyprus-TWERC (Tsunami Warning and Early Response system of Cyprus) and CSnet’s Offshore Communications Backbone (OCB), for up to 3000 m depth, were designed to support a modular architecture which may be linked together with several buoys, as shown in [
17,
18,
19]. The OCB consists of a buoy, a buoy riser cable (mooring/power and communications), an anchor, a seafloor cable, and four seafloor nodes. Cyprus-TWERC serves as the prototype Tsunami Warning and Early Response system. The surface buoy is equipped with a C-Band satellite antenna and can offer data bandwidth in excess of 2 Mbps. The buoy is powered by a diesel electrical generator which offers 1000 W power to the seafloor. The seafloor junction box is equipped with wet-mateable “plug-in” ports. Cyprus-TWERC can quickly transmit tsunami information to coastal residents and local government departments, such that they can take corresponding preventive measures.
GEOSTAR (GEOSTAR is a single-frame autonomous seafloor observatory) was developed as a single-frame seafloor observatory for geophysical and environmental monitoring, which is shown in [
20]. This system is able to operate from shallow waters to deep-sea (down to 4000 m). GEOSTAR includes a Bottom Monitoring System, a communication buoy, and a MODUS vehicle (MODUS, a simplified ROV, is the special vehicle for the deployment/recovery procedures.) The MODUS vehicle and hydraulic winch are utilized for the launch and recovery of the Bottom Monitoring System. The communication buoy is equipped with an acoustic hydrophone and a satellite antenna, in order to establish the data transition link from the Bottom Monitoring System to a shore station. A ship controls the MODUS remotely, through the EOM cable. The hydraulic winch launches and recovers the Bottom Monitoring System. GEOSTAR does not utilize wet-mateable “plug-in” for seafloor installation. The MODUS separates from the Bottom Monitoring System after deploying it on the seafloor.
Dimitris Konovessis et al. studied the development of relevant laws and regulations for offshore floating structures in recent years, summarizing some representative cases of sexual maritime safety accidents. After analyzing the destabilization evaluation rules of related organizations (e.g., classification societies), the key issues of stability requirements were pointed out and, finally, some reasonable safety methods were proposed for the future development of stability requirements of floating offshore structures [
21]. K.P. Thiagarajan and H.J. Dagher reviewed some key studies involving the floating infrastructure of offshore wind turbine systems. These floating foundation structures can be divided into three categories, according to their stability sources; namely, (1) ballast stabilized (low center of gravity; e.g., spar), (2) mooring stabilized (e.g., tension leg platform), and (3) buoyancy or water-plane stabilized (e.g., semi-submersible). Through the demonstration of key research on three types of floating infrastructure, the authors finally showed that floating offshore wind turbine systems require an intelligent combination of land-based systems and offshore engineering expertise, in order to develop sustainable solutions for the future [
22]. Agbomerie Charles Odijie et al. (2017) gave a detailed review of the origin and background of semi-submersible hulls, summarized the major advances in the application of semi-submersible hulls in marine engineering, and compared the technical differences of different semisubmersible hulls and their respective advantages and disadvantages. The authors found that the deep-water semisubmersible hull has better motion characteristics and can offer favorable payloads [
23].
Haicheng Zhang et al. established a generalized non-linear network dynamics model of floating airports of arbitrary topological form. Then, the dynamic response was analyzed and the numerical results showed that the non-linearity of connectors plays an important role in the dynamic behavior of the system. In addition, a new concept of stability design for floating airports based on the amplitude death mechanism was proposed for the weak oscillation state of the floating airfield module, which provided theoretical guidance for the safety design of floating airports [
24]. Chiemela Victor Amaechia et al. studied the load generated by waves and currents on the hose of the CALM (Catenary Anchor Leg Mooring) buoy, and discussed the influence of flow angle and hose hydrodynamic load on the hose structure response. The bending moment and tensile force distributed along the arc length of the hose were analyzed, and the influence of the increase in bending stiffness at the top connection and the bottom contact point were discussed [
25]. Chiemela Victor Amaechia et al. also performed numerical stress analysis for offshore composite risers at a depth of 2000 m. The kind of composite pipe was made of carbon fiber, PEEK (Poly ether ether ketone), and so on. The authors used six different lining materials and designed different composite riser configurations—each configuration having 18 floors—and used the ANSYS ACP 19.0 software to develop a finite element model of the stand pipe, according to the strength of the composites used for composite stress distribution in the riser. The Factor of Safety for The Composite Risers for different Load cases was presented, in order to guide Offshore designers of composite Risers [
26].
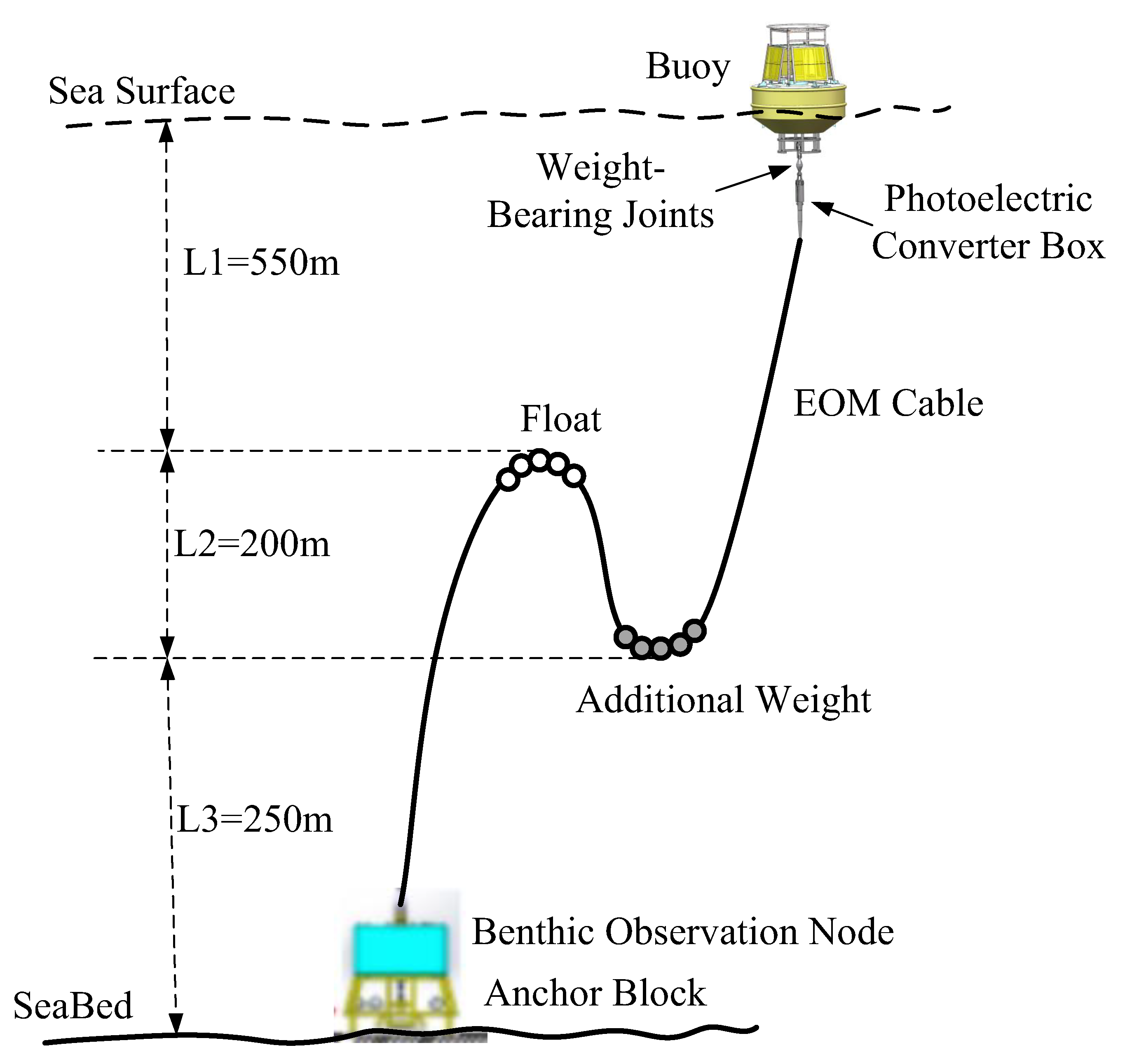
In this paper, the MBOSBC is designed for the seafloor and surface observation of the South China Sea, including (but not limited to) observations of ocean meteorology, ocean physical processes, and water quality of sea surface and seafloor. As the mooring of the buoy is directly related to the survival of MBOSBC, it is extremely important to study the mechanical characteristics of the buoy and the hydrodynamic characteristics of the EOM cable. This is a prerequisite for designing a reasonable mooring scheme.
MBOSBC includes a Mooring Buoy and a Benthic Node, these two components being connected by an EOM cable. The Mooring Buoy plays the roles of observation, power generation, and data transmission. The Benthic Node is designed for the requirements of ocean physical processes and seafloor video imaging. On the other hand, the Benthic Node plays the role of anchoring the Mooring Buoy. A cable- and acoustic-linked observatory for mooring buoy-based ocean observation was established. The winch system was designed to launch and recover the MBOSBC. MBOSBC is designed for the seafloor observatories off islands, as well as Ocean regions far from the coast. MBOSBC can be relocated or deployed rapidly for transient or long-term observations, with different combinations of cable link and acoustic link. In particular, the sea surface buoy, as the power generator and data transmitter, has several capabilities for long-term observation and real-time data transmission for deep-sea observations.
This report is organized as follows: Firstly, the MBOSBC is briefly introduced and, then, the parameters of buoy and benthic nodes are given. Secondly, the preliminary mooring method of the system is designed. Thirdly, the force of the buoy under wind and waves is calculated. The resultant force of the buoy under wind and wave action is used as the boundary condition of the mooring EOM cable at the upper node. The fourth step is to divide the mooring rope into several micro-sections and analyze the stress of the micro-sections. The hydrodynamic relationship between two adjacent segments is derived. Fifth, an iterative calculation program based on the mechanical relationship between micro-segments is developed, in order to calculate the tension value of each micro-segment. Sixth, according to the calculation results in the fifth step, the technical indices of the EOM cable are determined and the strength of the EOM cable required in the system is derived. Next, an experiment with the mooring system is introduced, in order to verify the reliability of the system. Finally, the work of this paper is summarized and the emphasis of future work is discussed.
3. Calculation Method of Mooring Force of the Cable
The buoy was moored by the EOM cable, while the EOM cable was moored the buoy by the benthic node. At the same time, the cable was affected by the ocean current force in the water. The buoy and the benthic node were connected together by the cable, such that the force added to the buoy and the benthic node by the ocean environment was used as the boundary conditions for the cable force analysis.
In this section, the hydrodynamic force of the cable caused by the ocean current is analyzed. For analysis of the hydrodynamic force, the mooring cable was divided into several micro-element segments. First, the force formulae of two adjacent micro-segments were obtained. Then, considering the current hydrodynamic force received by each micro-segment, the force relationship between adjacent micro-segments was derived and the iterative calculation algorithm of the hydrodynamic force on the EOM cable was deduced. Therefore, the tension of the EOM cable can be solved using the iterative calculation algorithm, selecting the two boundary conditions as the initial conditions at sea surface and seafloor.
To facilitate calculation, the following assumptions were made before the EOM cable hydrodynamic force analysis:
- I.
The effect of the ocean current on the cable in the vertical direction is negligible; this means that the current was assumed to be a planar flow field, and the system was simplified to a two-dimensional problem;
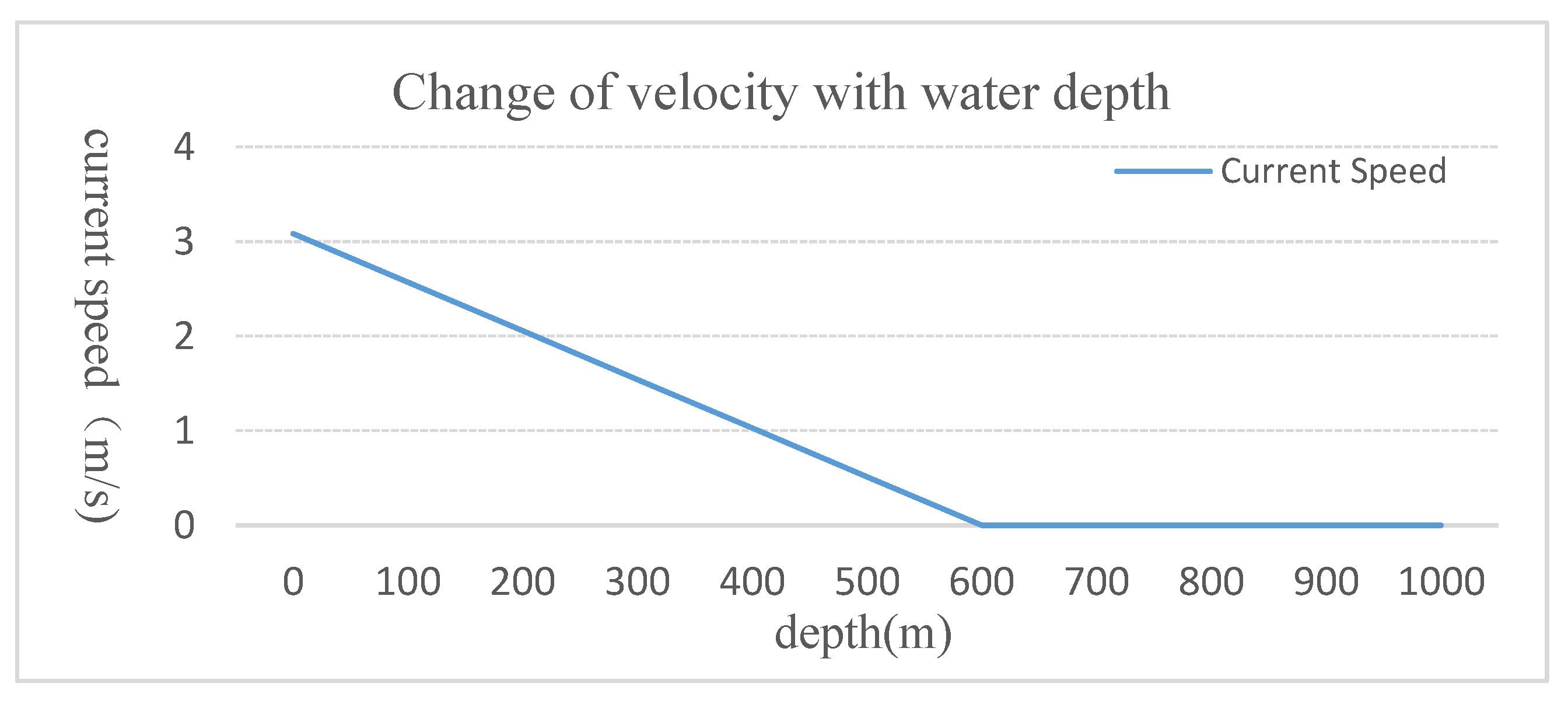
- II.
The current velocity gradually decreased from 6 knots at the surface to 0 at a depth of 600 m, as shown in
Figure 11. We assumed the velocity was 0 from the water depth of 600 m to 1000 m.
- III.
The mooring cable does not transmit bending moment and torque.
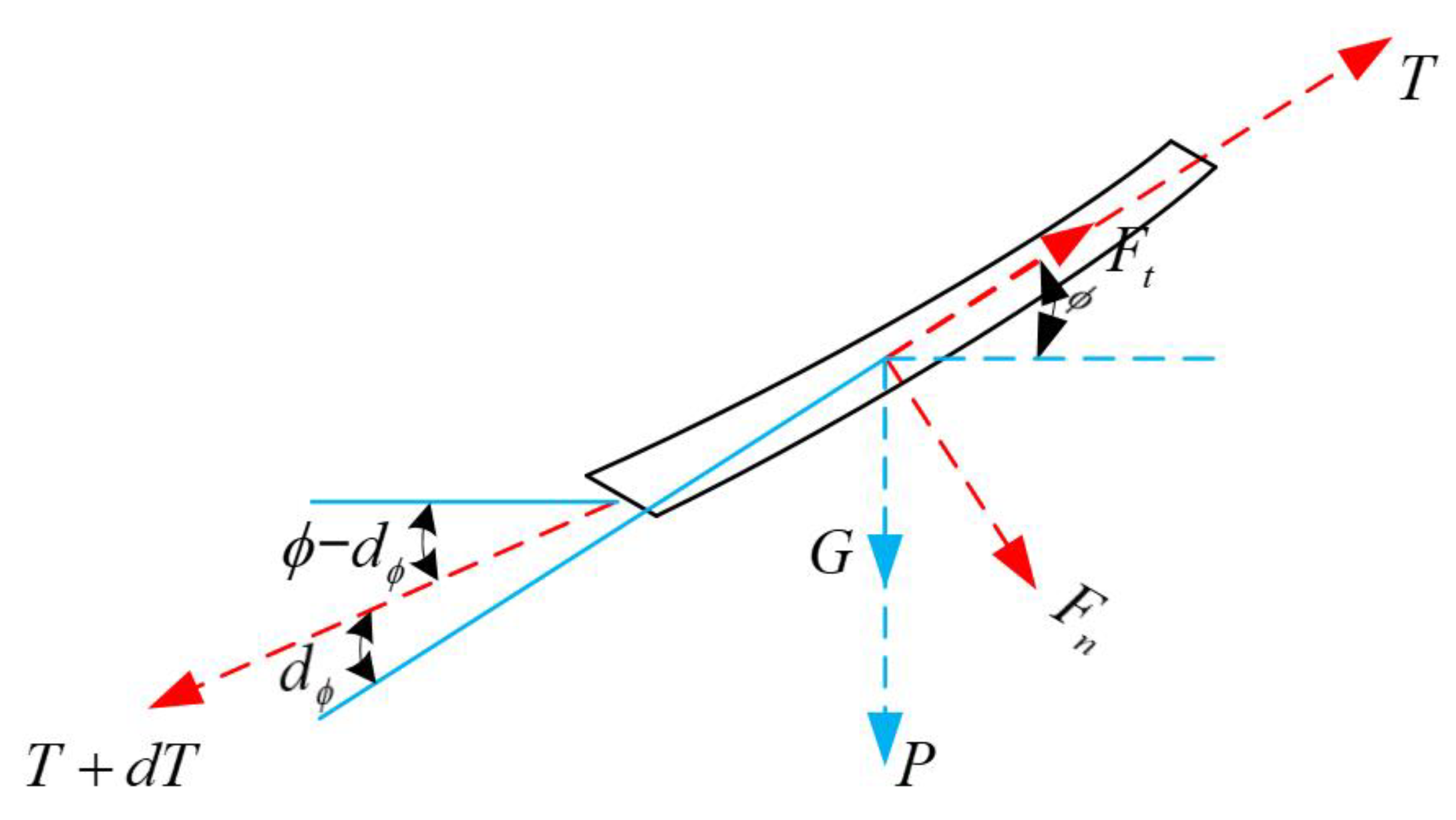
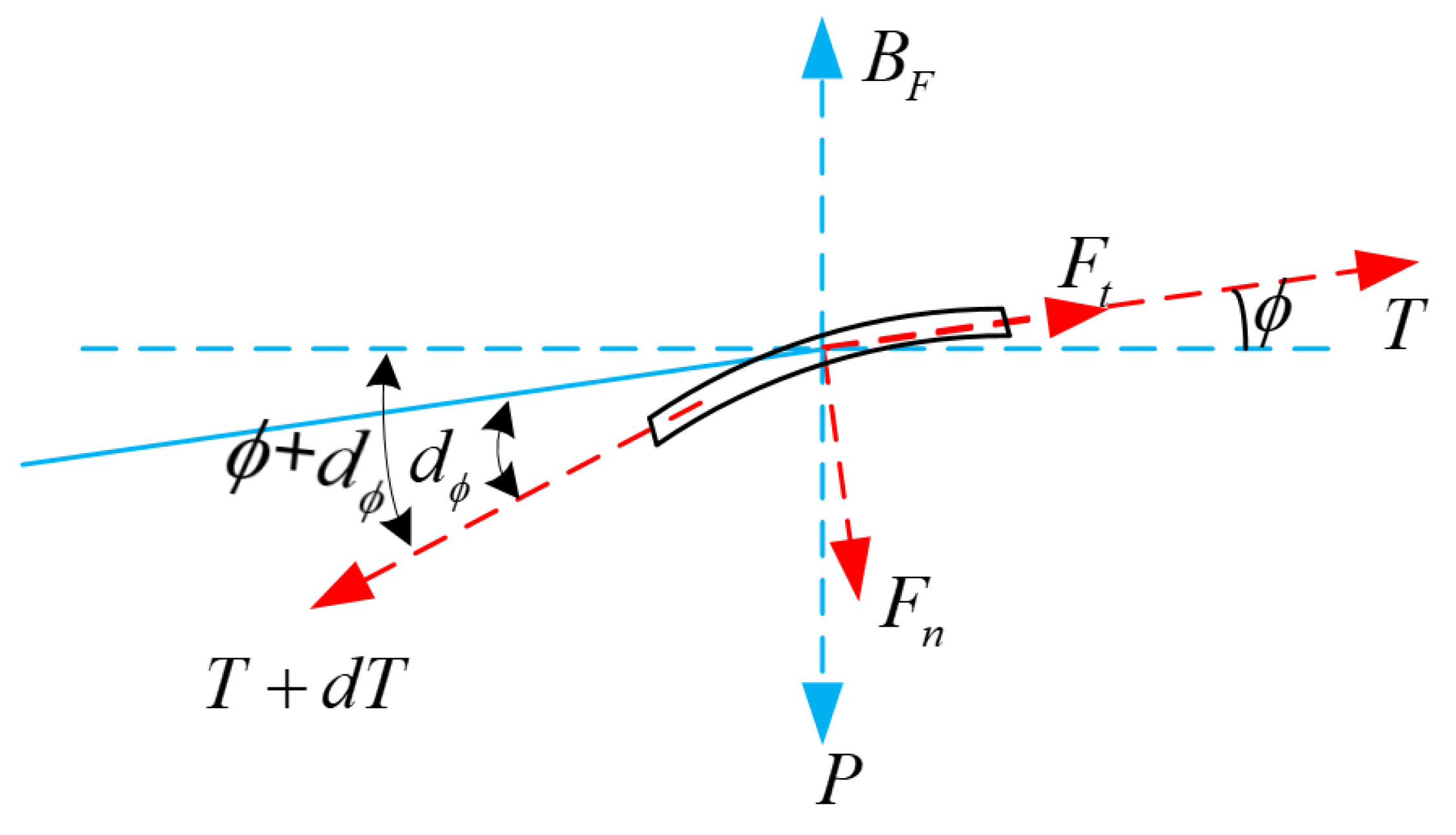
Under extreme sea conditions, the mooring system adopts the shape of an “S” mooring system, which is shown in
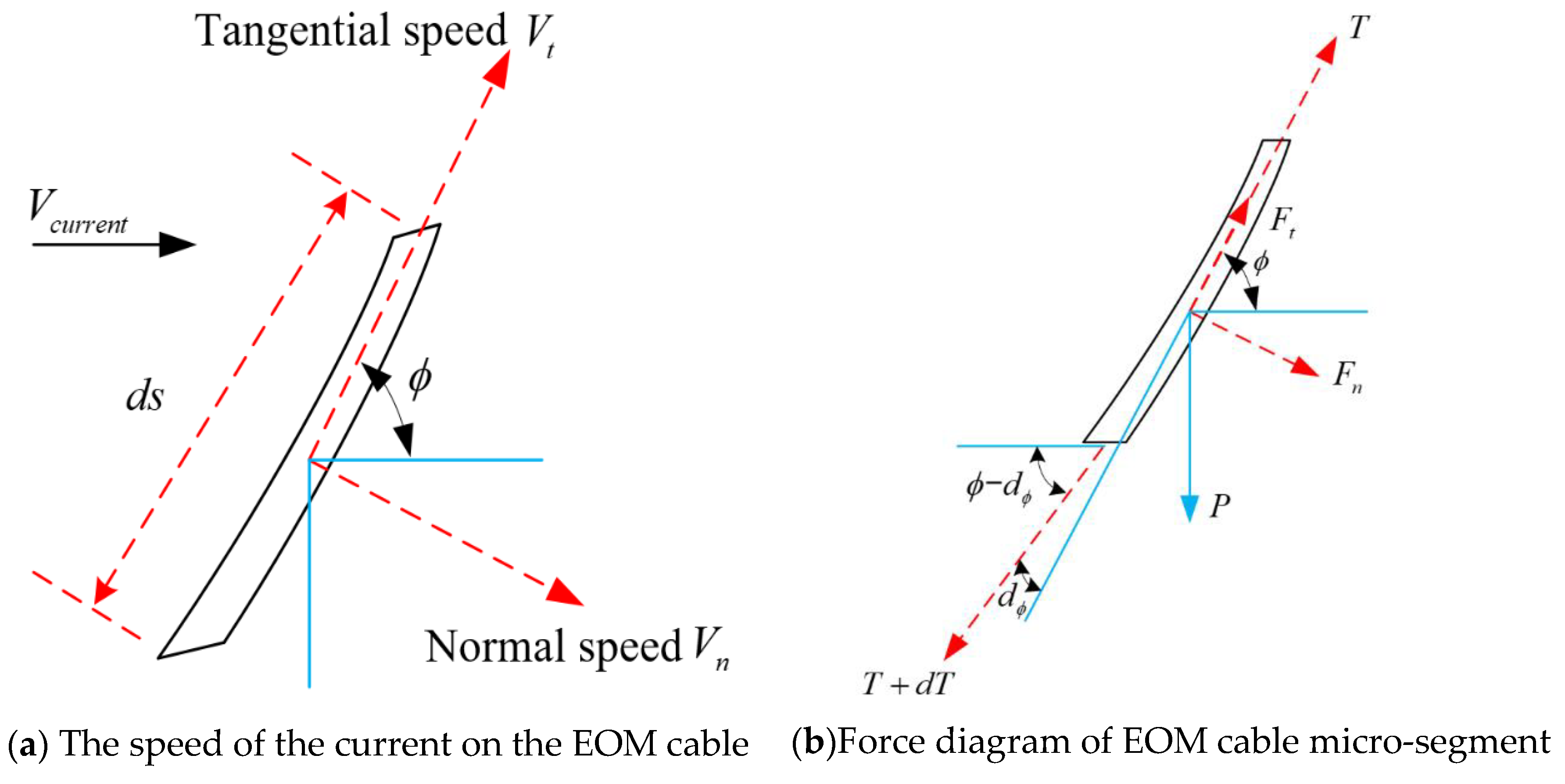
Figure 12. We selected a micro-segment on the mooring cable to analyze its tension. The force analysis of the micro-segment subjected to the ocean current is shown in
Figure 13.
Decomposing the force of the current on the micro-segment into tangential and normal directions, according to the hydrodynamic formula, we have:
The meanings of the variables in the Equations (12) and (13) and
Figure 13 are as follows:
—Tangential flow force,
—Normal flow force,
—Density of seawater,
—Tangential flow resistance coefficient = (0.01–0.03) ,
—Normal flow resistance coefficient,
—Diameter of EOM cable,
—micro-segment length,
—Current speed,
—Micro-section inclination,
—Net weight of micro-section in water (),
—Weight of Micro-section, and
—Buoyancy of Micro-section.
Suppose the tensions at both ends of the micro-segment ds are
and
, and the respective inclination angles are
and
. Then, the static balance equations at both ends of the micro-segment can be expressed as:
As
is a quantity approaching 0, we have
and
, where we have ignored the second-order infinitesimal quantity and, so Equations (14) and (15) can be simplified to:
From this, the iterative relationship of the force of each micro-section on the mooring cable can be obtained:
where
is the number of each microsegment, from top to bottom.
The inclination of the first micro-section of the cable can be derived from the force of the cable at the buoy end:
By subsequent iterative algorithm, the tension of each section of the mooring cable can be computed, in order to obtain the requirements of the EOM cable in the system.
The cable has buoyant floats and counterweight ballasts attached to some micro-sections. The force analysis of these micro-segments should take into account the influence of the float and counterweight. The hydrodynamic force analysis of the EOM cable of the micro-segment with respect to the ballasts and floats are shown in
Figure 14 and
Figure 15, respectively:
The force analysis idea of the micro-segments with floats and counterweights was the same as other micro-segments.
Additionally, considering the influence of the buoyancy of the float, the micro-segment force iteration formula with counterweight becomes:
where
is the net weight in water of the counter weight.
The iteration formula of micro-segment force with respect to a buoyant float is changed into:
where
is the net buoyancy of the float in water.
4. Numerical Simulation of Single-Point Mooring Cable
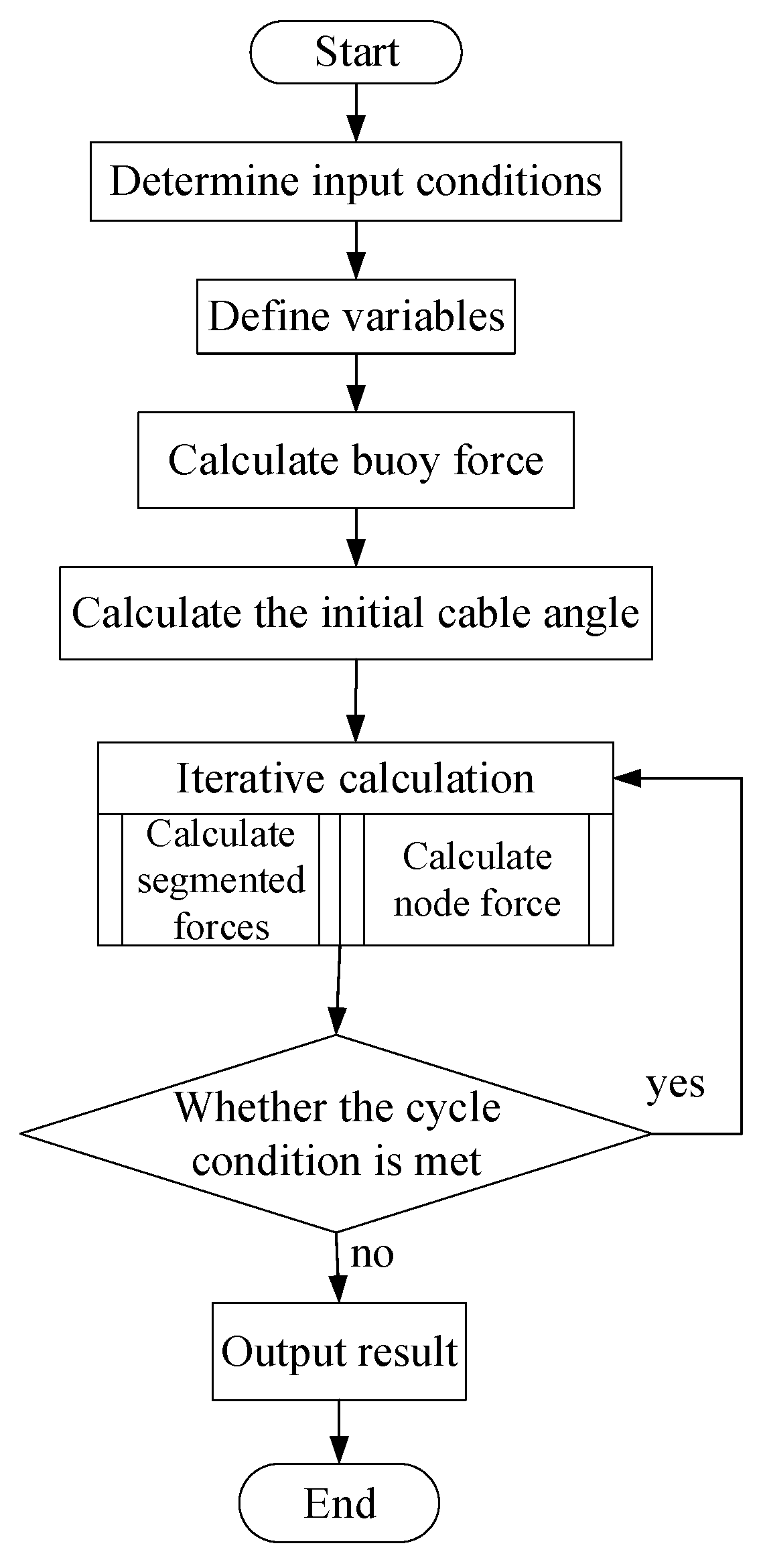
According to the above calculation method, a Matlab program was written to iteratively analyze the mooring force in 1000 m water depth.
The calculation process is shown in
Figure 16. First, we set the initial environmental conditions. Then, we defined the required variables, according to the calculation process. Next, we calculated the horizontal load, vertical load, and comprehensive load of the buoy, according to the wind, wave, and current conditions. Finally, we re-calculated the initial angle of the mooring cable, based on the buoy load. With this iterative algorithm, the initial angle of the cable and the load of the buoy are updated as the initial conditions of the cable force calculation program into the iterative formula, and the force of each section of the cable is iteratively calculated in turn, until the calculation achieves the precision we need, with the mooring force returned as the output of the iterative algorithm.
The calculated results of the buoy and cable under varying wind and current speeds are shown in
Table 1:
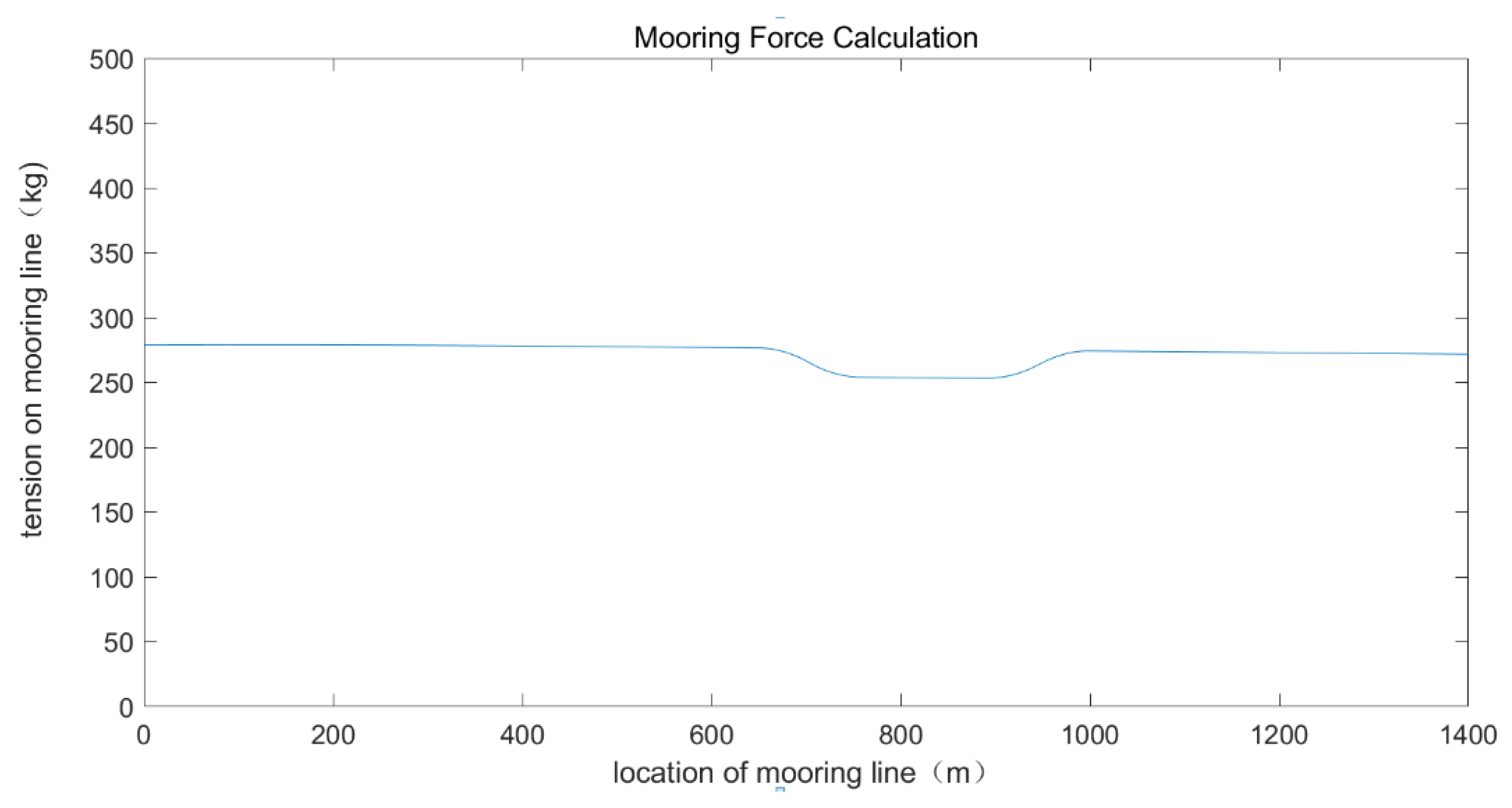
The mooring force property of the buoy under the wind speed of 10 m/s and the current velocity of 0.6 m/s was selected, as shown in
Figure 16. Further, the mooring force property of the buoy under the wind speed of 70 m/s and the current velocity of 3.0 m/s was also selected, as shown in
Figure 17.
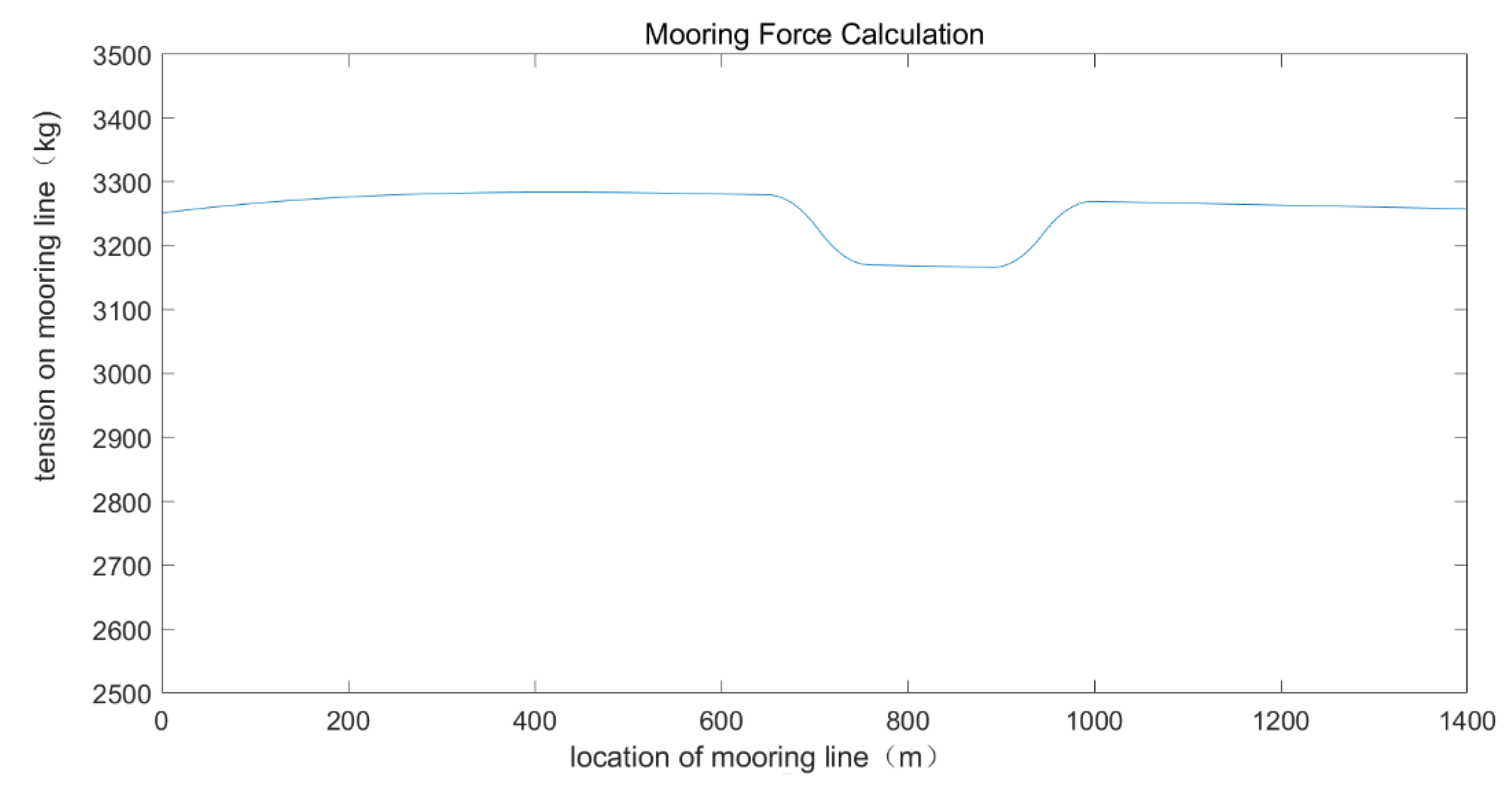
Figure 17 shows the variation of tension value of the EOM cable, from top to bottom, at low velocity. The tension on the EOM cable gradually decreases from top to bottom. The tension value changes greatly in the ‘S’ type segment: In the micro-segment with counterweight, the tension value decreases faster. In the middle of the ‘S’ type segment, the tension value retains the trend of decreasing, but its change range is small. In the micro-segment with float, the tension value in the EOM cable increases, where the change range depends on the buoyancy provided by the float for the EOM cable. The tension at the end of the EOM cable retains a small trend of decreasing.
Figure 18 shows the variation of tension value of the EOM cable, from top to bottom, at high current velocity. The tension value on EOM cable increases gradually, at first. Below the position of about 400 m, the tension value gradually decreases. In the ‘S’ section of the EOM cable, the change trend of tension value is the same as that under the conditions of low velocity. The reasons for this change are as follows:
Due to the action of the sea-current, the buoy is in the downstream direction of the benthic node, such that the cable forms an angle of inclination. As shown in the right of
Figure 12, the offset buoy produces a diagonal upward force on the cable, which is called
, and the flowing seawater also produces a diagonal upward force on the cable, which is called
. However, the net weight of the cable in the water causes the cable to bear a downward force, which is called
. As
is far greater than the other forces, the cable mainly bears an upward pulling force.
In the case of low sea-current velocity, the effect of is not as obvious as that of , so the tension in the cable gradually decreases. In the case of high flow velocity, the effect of is greater than that of , so the tension in the cable gradually increases. However, the velocity of the sea-current becomes smaller as the depth of seawater increases, and the effect of becomes smaller than . Therefore, the tension in the cable gradually decreases. In the ‘S’ section of the cable, the variation of is greater than the effect of , caused by the influence of the counterweight. So, the tension in the cable decreases quickly, where the degree of the decrease depends on the weight of the counterweight.
In the micro-segment with floats, the buoyancy of the float causes to act in the opposite direction, such that the tension quickly increases, where the increase depends on the buoyancy provided by the float.
If the EOM cable is heavier, the pulling force of the cable from the top to the bottom can be reduced greatly. However, considering that the buoy must have some reserve buoyancy, the EOM cable utilized in the system should not be too heavy. For example, if the cable is 1 kg per meter, then the cable with 1000 m length needs the surface buoy to provide 1 ton of buoyancy and, so, the buoy needs a larger reserve buoyancy. Considering the aim of convenience of buoy deployment and recovery, the weight of the cable should limited within a suitable range.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}