1. Introduction
The application of traditional energy resources (e.g., fossil fuels) causes serious environmental pollution. Renewable energy resources, such as wind, sunlight, ocean currents, waves, and tidal current, have been introduced as alternatives for achieving a low-carbon society. Ocean current energy is a potential power source that must be developed. Various forms of ocean energy are being investigated as potential sources of power generation [
1,
2,
3,
4]. For example, the Kuroshio Current—a strong current passing through the east of Taiwan—is expected to be an excellent energy resource. It has a mean velocity of 1.2–1.53 m/s near the surface and the potential electricity capacity of the Taiwan Current is approximately 4 GW [
5]. This ocean energy source is stable and abundant, with the potential to be developed and utilized.
Tidal current—which can be extracted from the rise and fall of sea levels under the gravitational force exerted by the Moon and Sun as well as Earth’s rotation—is one of the most valuable resources. Moreover, tidal current energy is more predictable than wind and wave energies [
6]. Tidal current turbine (TCT) can be categorized into horizontal- and vertical-axis tidal turbines [
7,
8]. These inventions can harness the kinetic energy of tides and principally convert it to electricity. Horizontal-axis TCTs are the most common device, with their rotation axis parallel to the current stream direction [
9,
10]. By contrast, vertical-axis TCTs rotate about a vertical axis perpendicularly to the current stream [
11]. Chen and Lam [
6] reviewed the survivability of tidal power devices used to harness tidal power.
Zhou et al. [
7] presented up-to-date information on large tidal turbine projects with a power exceeding 500 kW as well as their achievements and development histories. Most industrialized marine current turbine (MCT) devices are horizontal-axis turbines, with the rotation axis parallel to the current flow direction. The main disadvantages associated with vertical-axis turbines include their relatively low self-starting capability, high torque fluctuations, and generally lower efficiency than horizontal-axis turbines. The power of industrialized MCT devices rigidly fixed at a seabed below 80 m depth, such as Atlantis AR1000 turbine, Voith Hydro turbine, and GE-Alstom tidal turbine, is over 1 MW at a current speed of approximately 2.4–4 m/s. These are called seabed-mounted turbines. Some devices, such as the Scotrenewables SR250 turbine and Ocean Renewable Power Company (ORPC) turbine, are flexibly moored at deep seabeds.
A flexible moored device is an important tool for deployment in deep water. The majority of moored tidal current turbine developers agree that by using a flexibly moored system, the device will be automatically self-aligned to the direction of current flow [
7,
12,
13,
14,
15]. A traditional design uses the gravity foundations or piles in deep water, which are complex and expensive. The flexible mooring lines and anchors can be deployed in deep water, where the other designs may by impractical [
16]. Thus, it is important to develop a mathematical model for a flexible mooring system for ocean current energy systems. Muliawan et al. [
17] determined the extreme responses in the mooring lines of a two-body floating wave energy converter with four catenary cables. Angelelli et al. [
18] investigated the behavior of a wave energy convertor mooring system with four spread cables by using Ansys AQWA software. Chen et al. [
4] investigated the wave-induced motions of a floating wave energy converter (WEC) with mooring lines by using the smoothed particle hydrodynamics method. Davidson and Ringwood [
19] reviewed the mathematical models for wave energy convertor mooring systems. The marine energy developer Minesto [
20] developed a floating subsea kite with flexible mooring.
Cribbs [
7] proposed a conceptual design for the flexible mooring of a current turbine fixed to a 300-m-deep seabed. The system included a mooring chain, a mooring line, a flounder plate, two lines for the turbine and the platform, a marine turbine, and a rotating turbine using blade-estimated airfoils. However, this system has not been practically applied thus far. Chen et al. [
4] successfully moored a 50 kW ocean current turbine supplied by Wanchi Company to an 850-m-deep seabed at the offshore area of Pingtung County, Taiwan. At a current speed of 1 m/s, the output power of the system was 26 kW. IHI and NEDO [
21] conducted a demonstration experiment of the ocean current turbine located off the coast of Kuchinoshima Island, Kagoshima Prefecture, and obtained data for commercialization; the demonstration experiment was conducted for seven days. The turbine comprised a combination of three cylindrical floats, called pods, having a total length of approximately 20 m, width of approximately 20 m, and turbine rotor diameter of approximately 11 m. The turbine system was moored from the anchor installed on a 100-m-deep seabed.
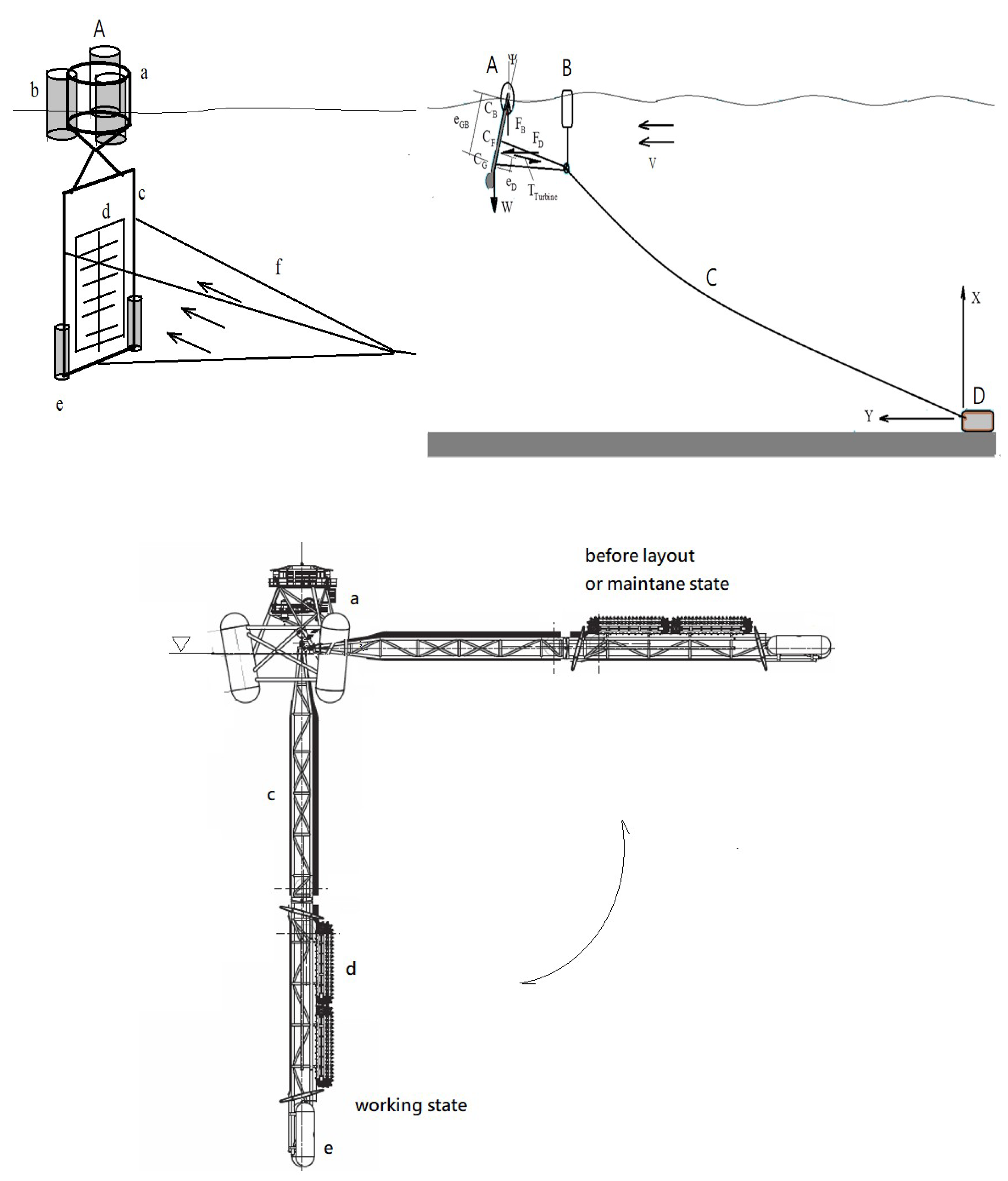
Besides the current rotating-type turbine, the Wanchi Company is also developing an ocean current turbine with a translational blade. To produce more power from the ocean, it is configured with several matrix-array turbines. The system comprises a turbine, a buoyance platform, a traction rope, and a mooring foundation, as shown in
Figure 1. The ocean current turbine is tethered to an ~900-m-deep seabed and the ocean current flows perpendicular to the turbine plane. This system might be more unstable than the horizontal rotational turbine. The system is composed of a turbine, a buoyance platform, a traction rope, and a mooring foundation. The system stability is important for the practical operation. So far, only a few studies have investigated the stability of the ocean current turbine system. No literature is devoted to the mathematical model of the system about the coupled heaven, surge and pitch motions. No analytical solution of the system is also presented. Because the system must be sufficiently stable under the effect of wave, the mathematical model is developed and the analytical solutions are presented in this study. Moreover, the effects of several parameters on the system stability are investigated.
In
Section 2, a two-dimensional model for the motions of the ocean current turbine system and floater is developed. The turbine system and floater are treated as rigid bodies and the cables are divided into two sections. Theoretical solutions of the motions are presented in
Section 3. As detailed in
Section 4, a series of simulations were conducted for evaluating the dynamic stability of the system under various wave conditions.
Section 5 summarizes the present study and provides some concluding remarks.
2. Governing Equations
According to
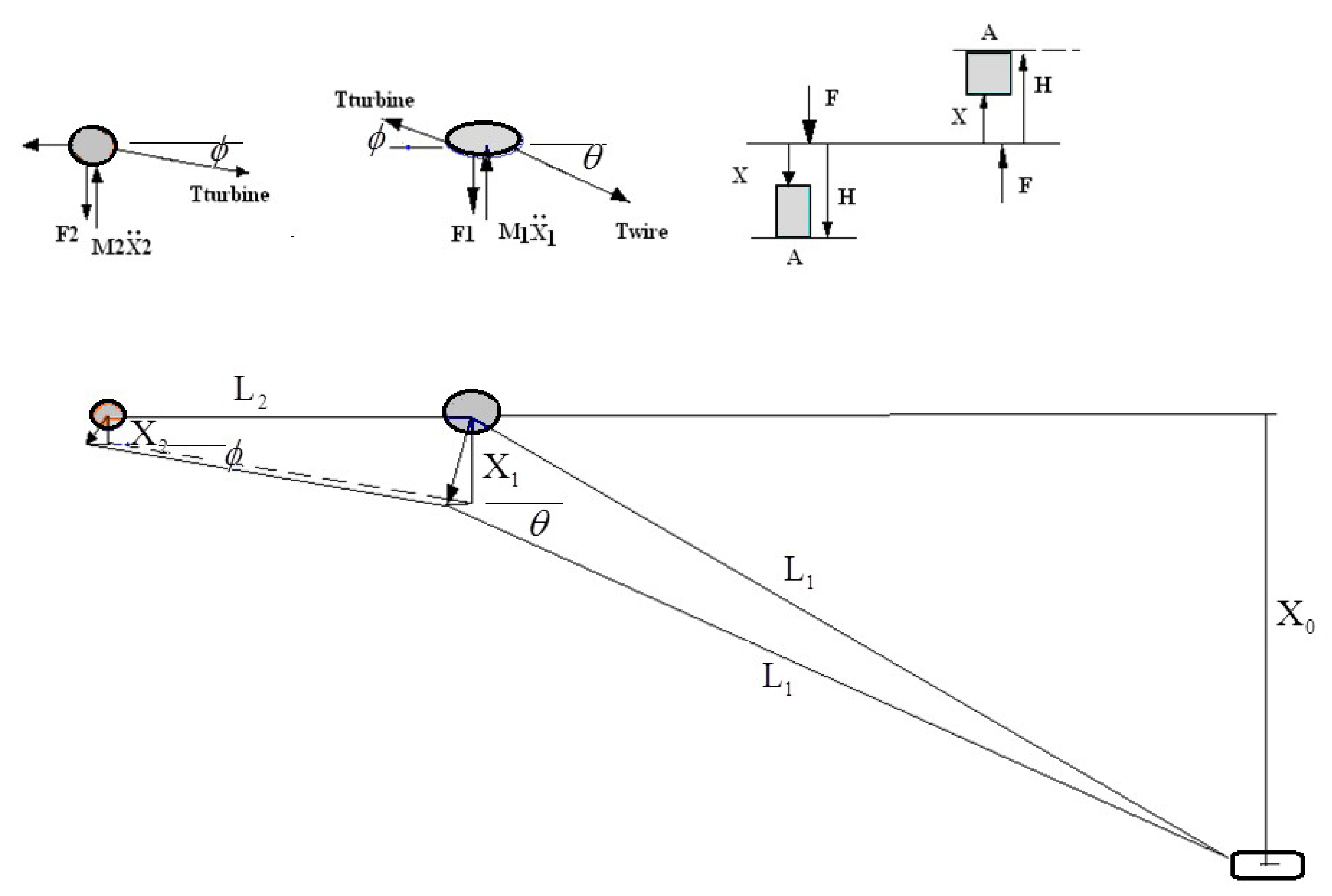
Figure 1, the analysis of the motion and dynamic stability of the ocean current turbine system with a flexible mooring cable is complex. Assume that the structures of turbine and carrier subjected the force due to wave and current are kept during the motion. Because the displacement and pitching motion of the system are significantly concerned, these two components are considered rigid bodies. Moreover, the inertia effect of the elastic cable is neglected. Therefore, the system is simulated as a discrete one. The overall system comprises an anchored mooring, a carrier, and a vertical ocean turbine system driven by a translational blade with a gravity anchor. A mooring system that comprises a long main cable with a sub-cable connecting the carrier and ocean turbine is deployed. Due to the complexity of system stability, the flow field is considered to be in steady state and the ocean current velocity is assumed to be constant and uniform. The horizontal force applied to the turbine and its structure during electricity generation is also assumed to be constant. The coupled motion of the system includes the horizontal, vertical, and pitching oscillations. As shown in
Figure 2 and
Figure 3, owing to the wave fluctuation, the buoyance forces applied on the floating platform and turbine can be expressed as follows:
where the subscripts “1” and “2” denote the carrier and turbine, respectively, and
and
denote the corresponding hydrodynamic areas. The wave heights at the carrier and turbine are
and
, where
is the wave amplitude. (
−
, I = 1~2) indicates the vertical displacement,
is the wave frequency, and
is the phase lag due to the propagation delay from the carrier to the turbine. On the basis of linear wave theory, the phase is expressed as
, where
indicates the wave number,
is the horizontal distance between the carrier and turbine,
(=1025
) is the density of water, and g (=9.81
) is the gravitational acceleration.
According to the static equilibrium, the force in the horizontal direction at the joint o is expressed as follows:
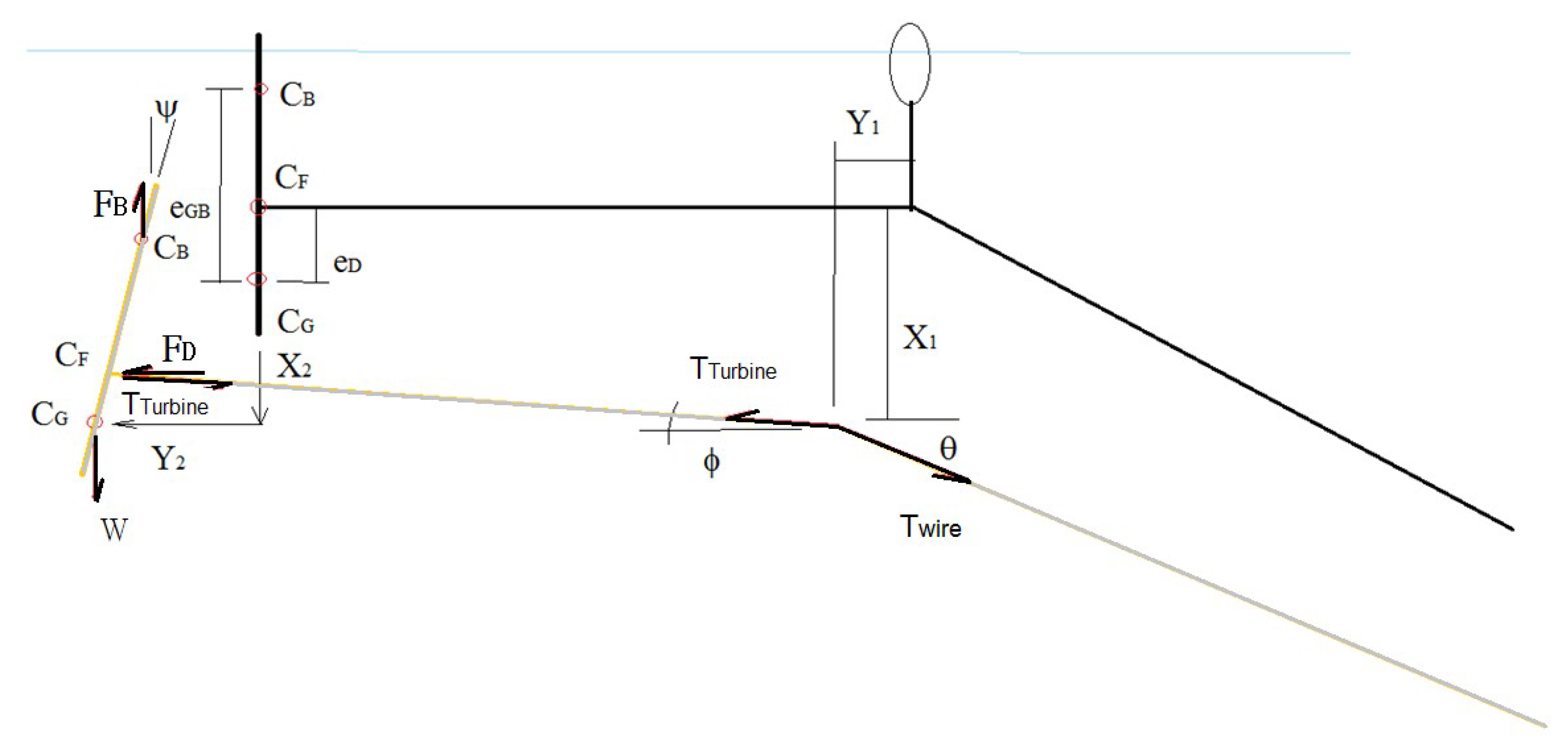
According to the dynamic equilibrium, the equations of motion of the floating carrier and turbine platform in the vertical direction are expressed as
and
where
and
are the vertical accelerations of the floater and turbine, respectively;
is the tension of the wire between the turbine and floater; and
is that between the cable and anchor. If the vertical displacement is substantially smaller than the connecting cable between the floating and turbine platforms, the angle
is very small, as shown in
Figure 2, and can be approximated as follows:
The cable made by polyethylene dyneema connecting the floating platform and mooring foundation is considered. The material is the ultra-high molecular weight polyethylene (UHMWPE). Because the material properties are great strength, light weight and flexible, the mooring cable is likely straight during the turbine subjected to the ocean current force. Moreover, because the vertical displacement is significantly smaller than the water depth, the following approximate relation can be obtained:
Through substituting Equations (3), (6) and (7) into Equations (4) and (5), we obtain the coupled equations of motion in terms of vertical displacements
for the carrier and turbine:
and
Equations (8) and (9) can be expressed as the equation of vertical motion in the matrix form
where the first
matrix is the mass one, the second
matrix is the stiffness one, the last term is the forcing one due to the wave and the force of the turbine and
where X0 is the depth of the seabed, {X1, X2} indicate the vertical displacements,
is the phase lag angle, and {M1, M2} are the masses.
Because the distance
between the centers of gravity and buoyance of the ocean turbine set is almost constant during the pitching motion, the righting moment is ‘
’ and the heeling angle curve can be expressed as ‘
’. Based on the principle of dynamic equilibrium, the equation of horizontal translational motion for the turbine can be derived
where
. Considering the velocity resulting from the oscillation
, the drag force becomes
.
Because the angle
approaches zero and
, Equation (11a) becomes equivalent to the equation of horizontal motion:
In the dynamic equilibrium equation, the pitching motion of the turbine is expressed as
Considering the pitching angle
to be small and based on Equation (6), the equation of the pitching motion becomes
where
y indicates the horizontal displacement,
indicates the pitch angle of the turbine,
A is the area of drag,
CD is the drag coefficient,
is the distance between the centers of gravity and buoyance,
V is the current velocity, and
l is the radius of rotation.
4. Numerical Results
It is important to design the current turbine system to be stable in order to obtain good performance and control requirement. The theoretical solutions, including static and dynamic stability systems, are introduced in
Section 3. Here, the behaviors of the turbines and floaters under the effects of wave and ocean currents are numerically analyzed.
Figure 4,
Figure 5,
Figure 6 and
Figure 7 show the effects of wave frequency f, drag force
, and turbine area
on the amplitudes
of vertical vibration.
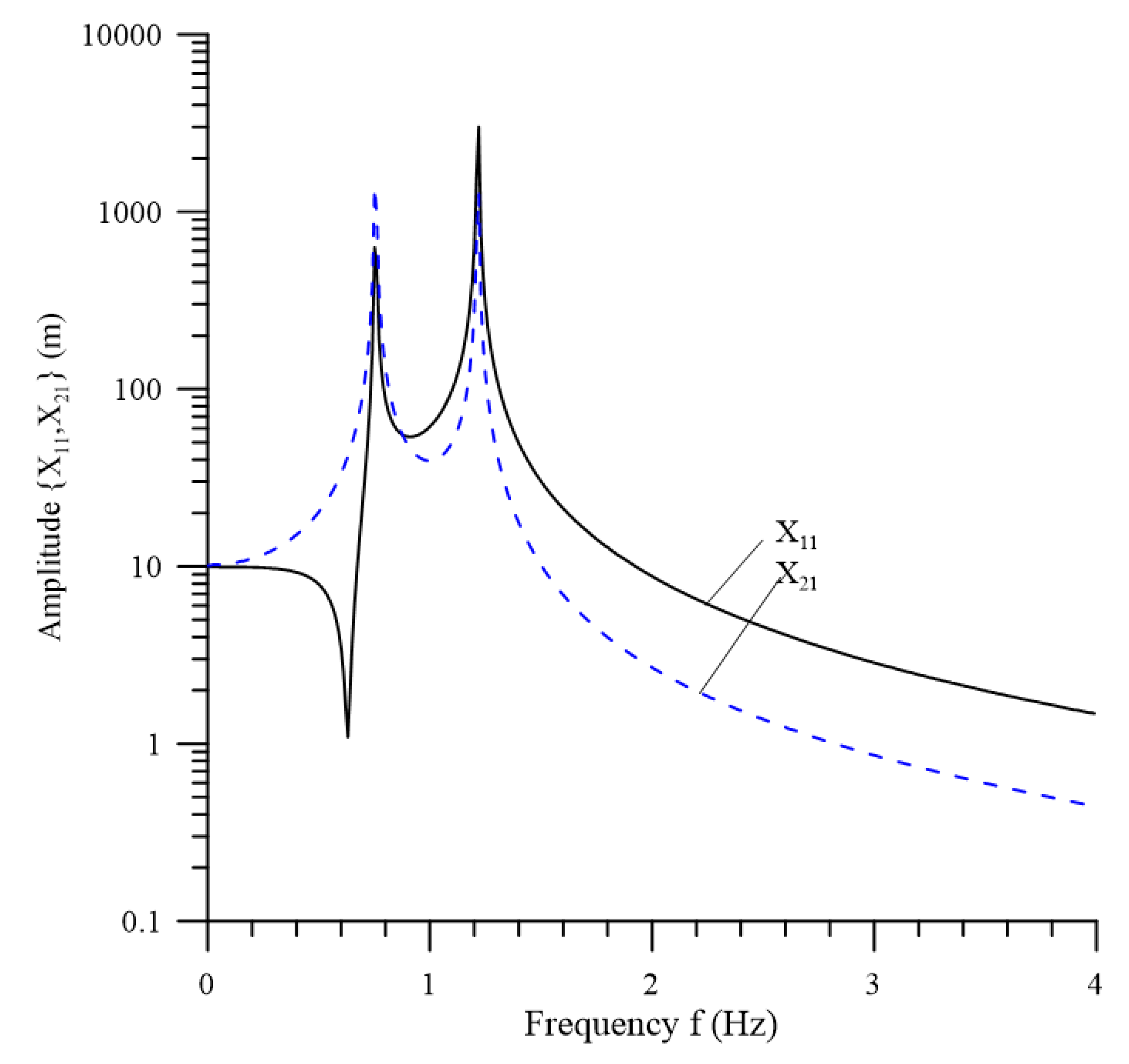
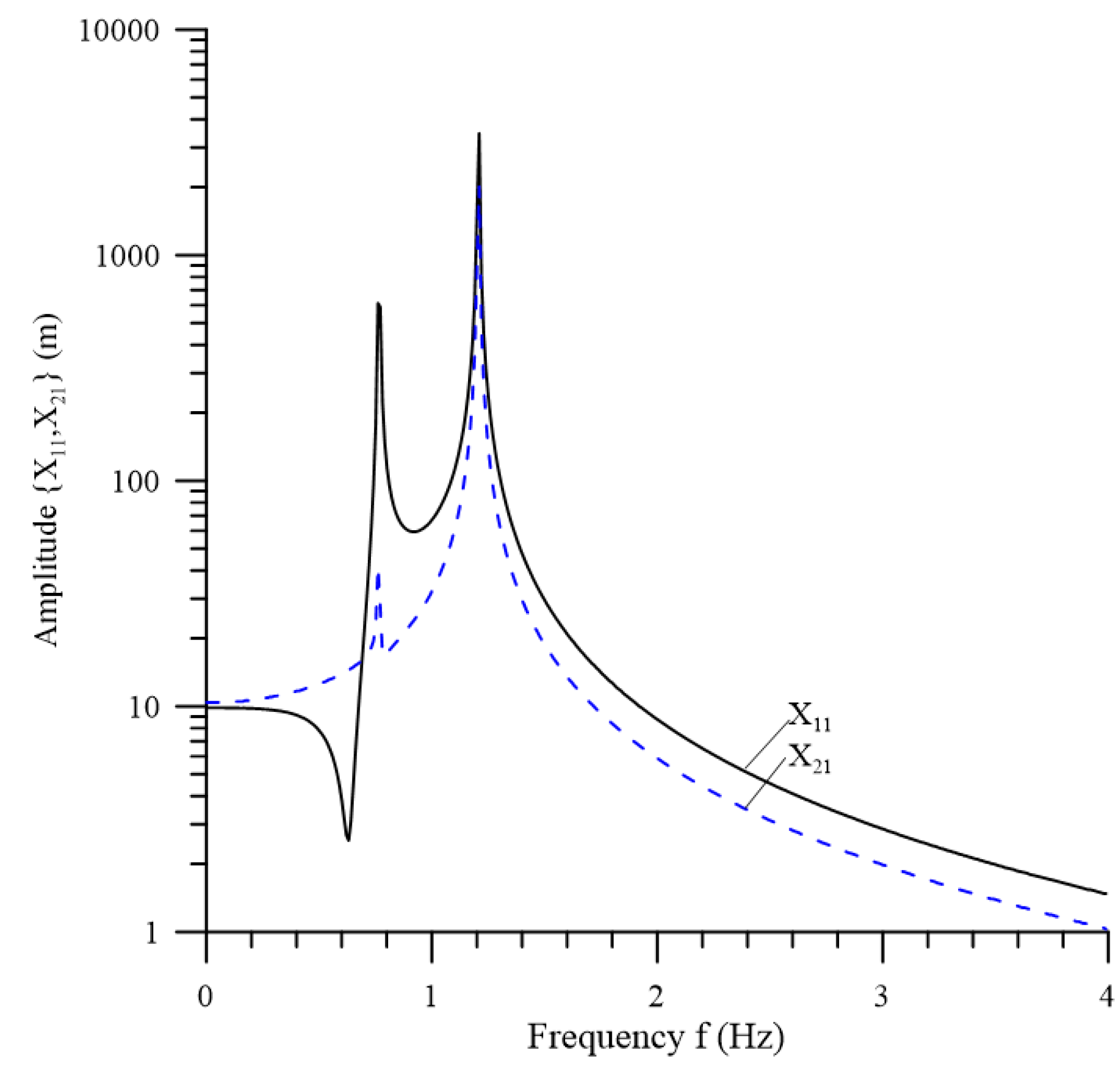
These amplitudes under the condition of
at various wave frequencies are shown in
Figure 4, where the dynamic motions of the turbine and floater change with the wave frequency. A lower wave frequency causes a lager vertical displacement of the turbine and floater, and the excitation of the floater is larger than that of the turbine. The vertical vibrations have two peaks at the natural frequencies {0.751 Hz, 1.22 Hz}, which are almost the same for the turbine and floater. This is attributed to the resonance vertical motion.
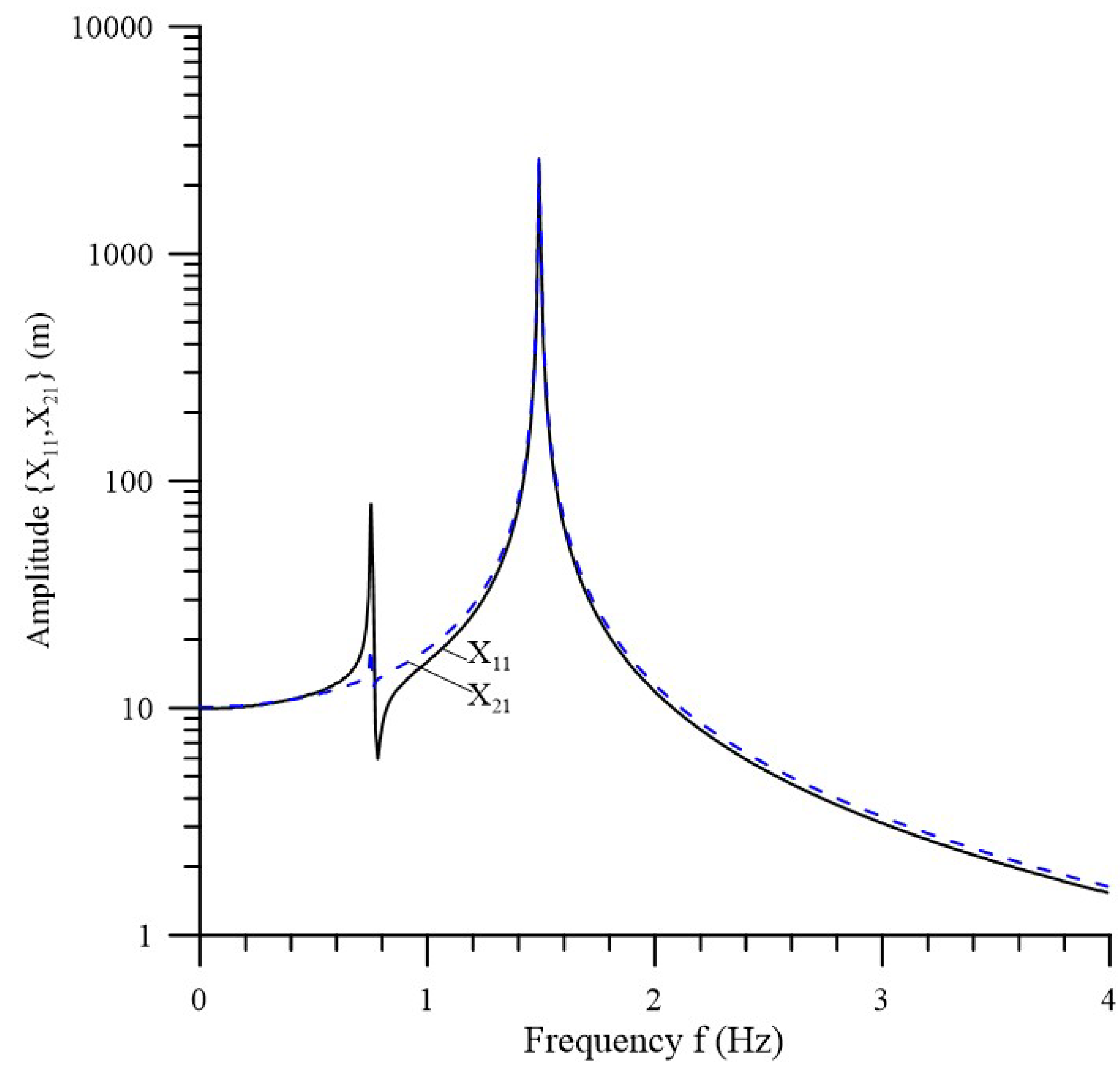
Figure 5 shows the effect of wave frequency on
under the condition of
. The vertical vibrations have two peaks at the natural frequencies {0.761 Hz, 1.21 Hz}. The results in
Figure 4 and
Figure 5 show that the pretension
has only a slight influence on the resonance condition.
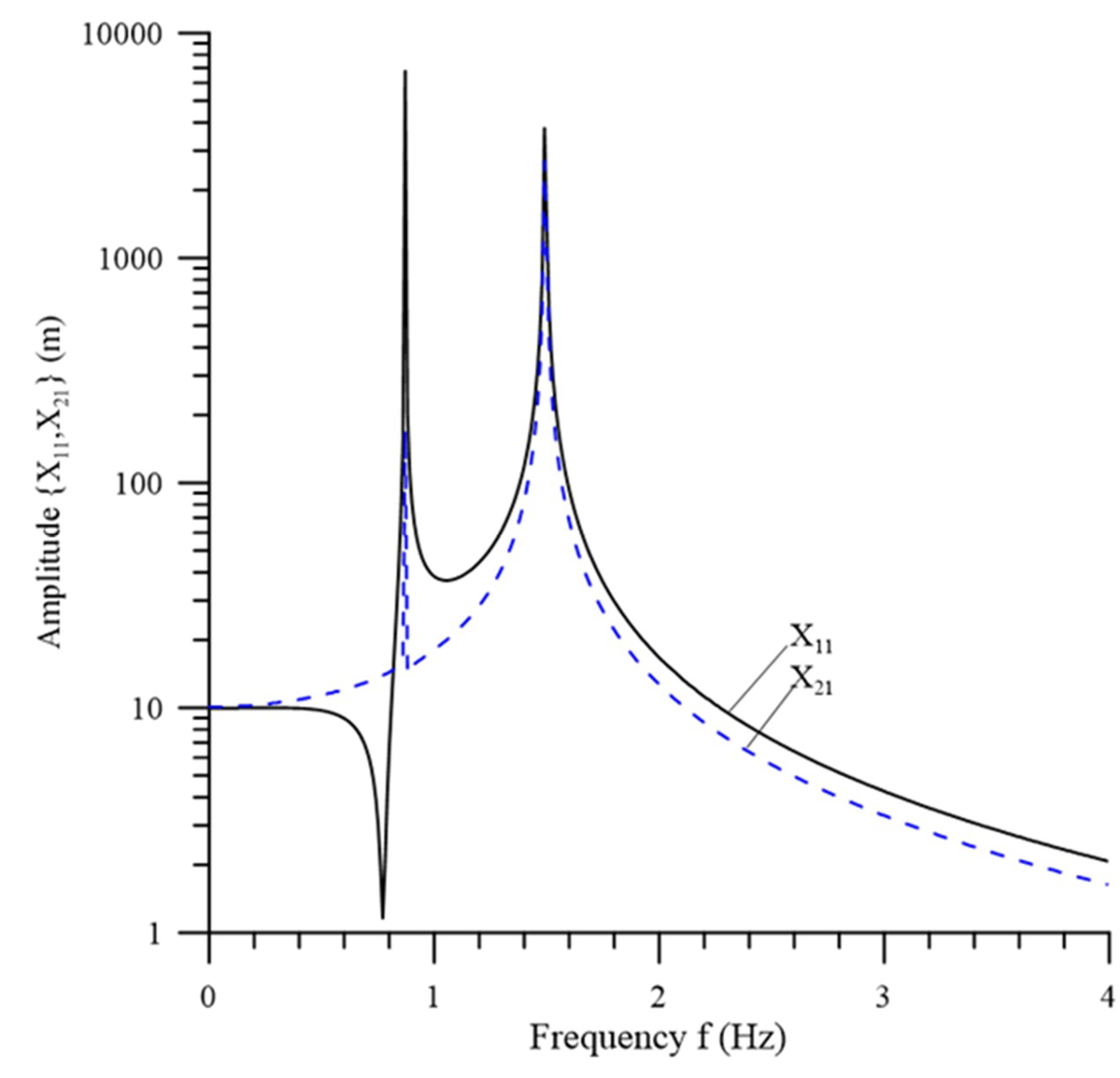
The effects of the hydrodynamic area of the turbine and floater on vertical excitation are shown in
Figure 6 and
Figure 7, respectively.
Figure 6 demonstrates the effect of wave frequency on
at {
=
}. The two natural frequencies at the resonance are {0.751 Hz, 1.49 Hz}. Compared to
Figure 4, this figure shows that the turbine area has a substantial effect on the second natural frequency. However, the effect on the first natural frequency is negligible. The effect of the wave frequency on
at {
=
} is shown in
Figure 7. The two natural frequencies are {0.871 Hz, 1.49 Hz}, which differ from the results shown in
Figure 4. The resonance effect occurs at higher wave frequencies, which shows that the floater hydrodynamic area has a more substantial influence on the two natural frequencies. We can thus conclude that the larger the floater and turbine areas are, the higher the natural frequencies are. Thus, the effect of the floater area is more significantly greater than that of the turbine area.
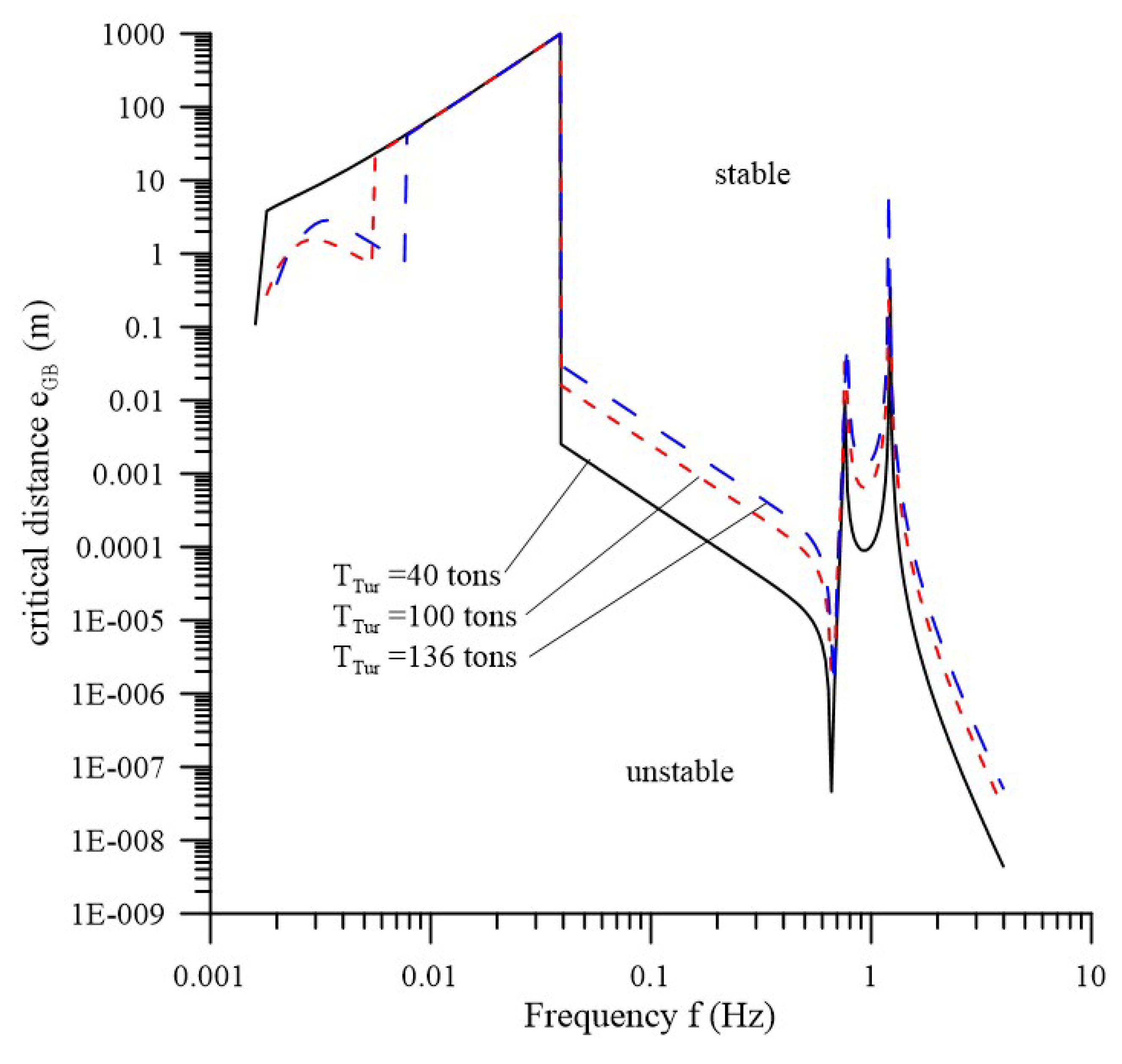
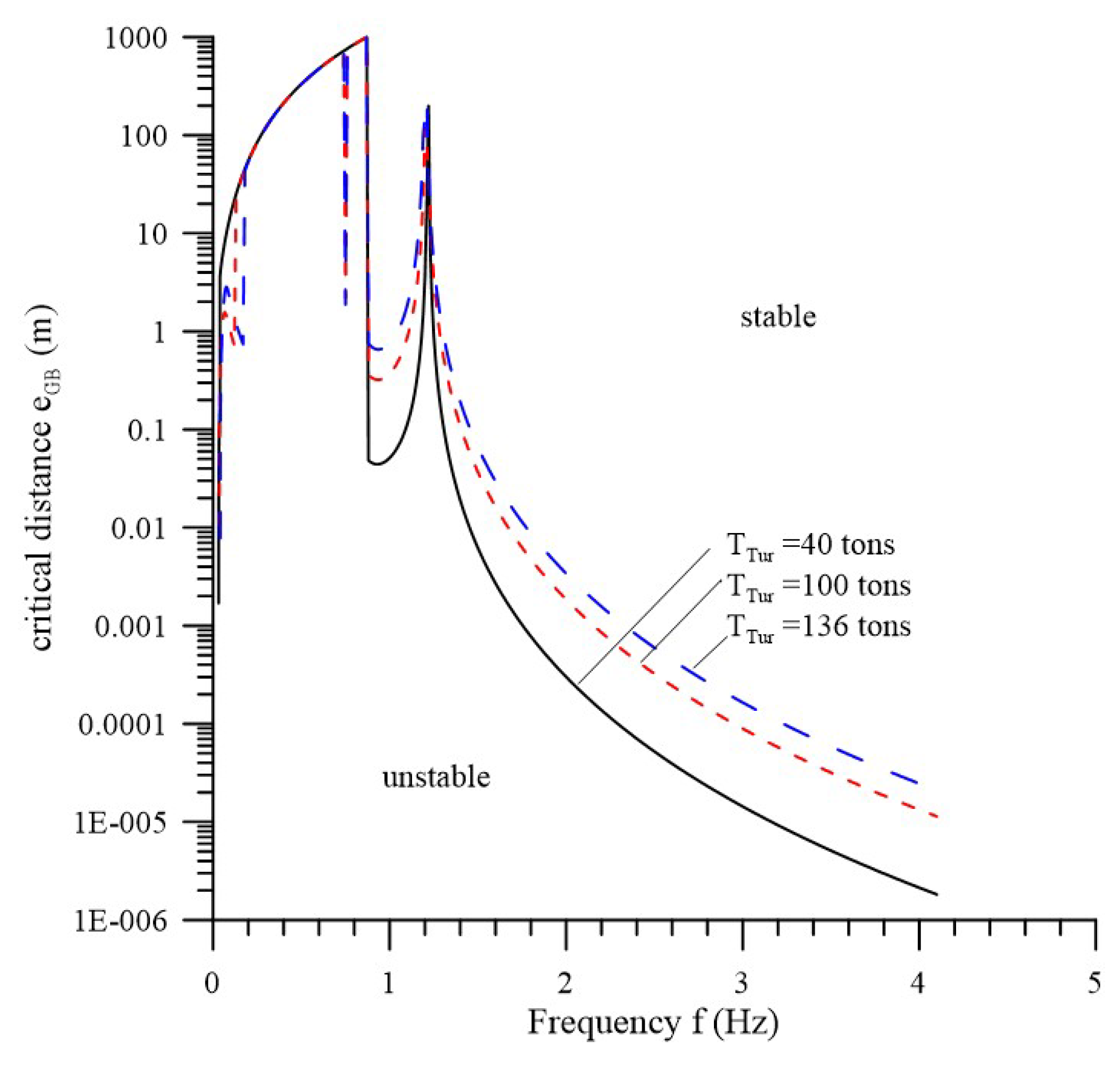
It is well known that when dynamic stability is being considered, a larger-
eGB between the gravity and buoyance centers is preferred. The critical distance
about the instability of pitching motion is investigated here.
Figure 8 shows the variation in the critical distance
with the wave frequencies under three drag forces
at the moment of inertial
. For the wave frequency over 0.03 Hz, the larger the drag force
, the longer the critical distance
. In other word, for the larger the drag force
the longer distance is required for the dynamic stability. Moreover, for a wave frequency over 0.03 Hz, the critical distance,
, is less than one, except at a frequency of 1.9 Hz. Thus, if
is larger than 1 m, the instability will not occur at a wave frequency above 0.03 Hz. However, for a wave frequency under 0.03 Hz,
is larger than 2 m, and thus the ocean current system will be unstable. According to
Figure 9, at
, for the wave frequency under 1 Hz, the critical distance
is larger than 2 m and the entire system cannot maintain dynamic stability. It is concluded from
Figure 8 and
Figure 9 that the larger the moment of inertial
I, the better the stability of system.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








