
A Practical Trajectory Tracking Scheme for a Twin-Propeller Twin-Hull Unmanned Surface Vehicle



Abstract
:1. Introduction
1.1. Related Works
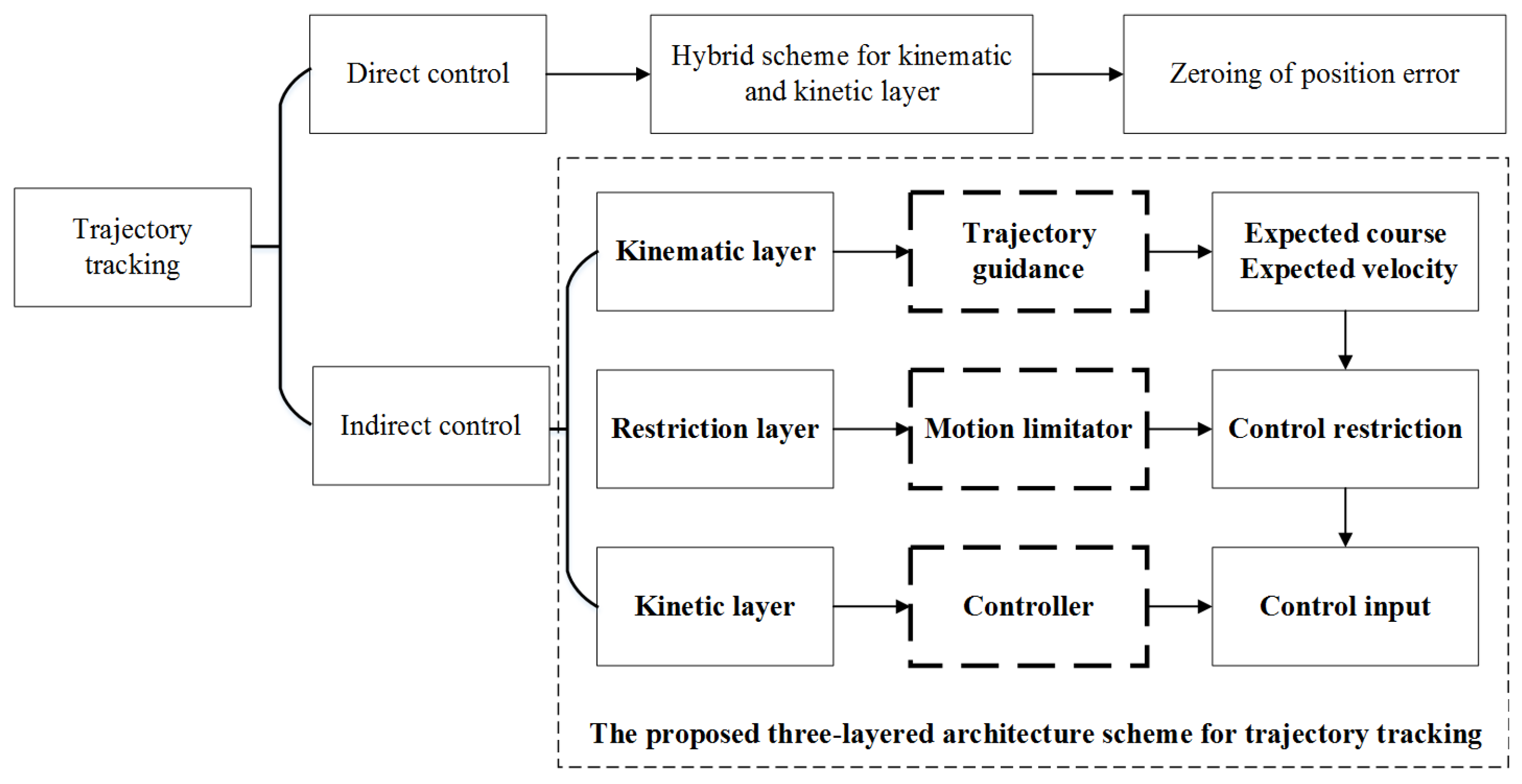
1.2. Scheme Design and Paper Structure
- In the kinematic layer, an improved LOS law is proposed based on an adaptive look-ahead distance, which can not only steer the course of the USV, but can also regulate the speed of the USV.
- In the restriction layer, some constraint of control is given out based on an identified model. Since a precise model of the USV cannot be easily acquired due to the complicated hydrodynamic analysis and huge experimental cost, some constraints can be evaluated based on some classic model or basic experiment data.
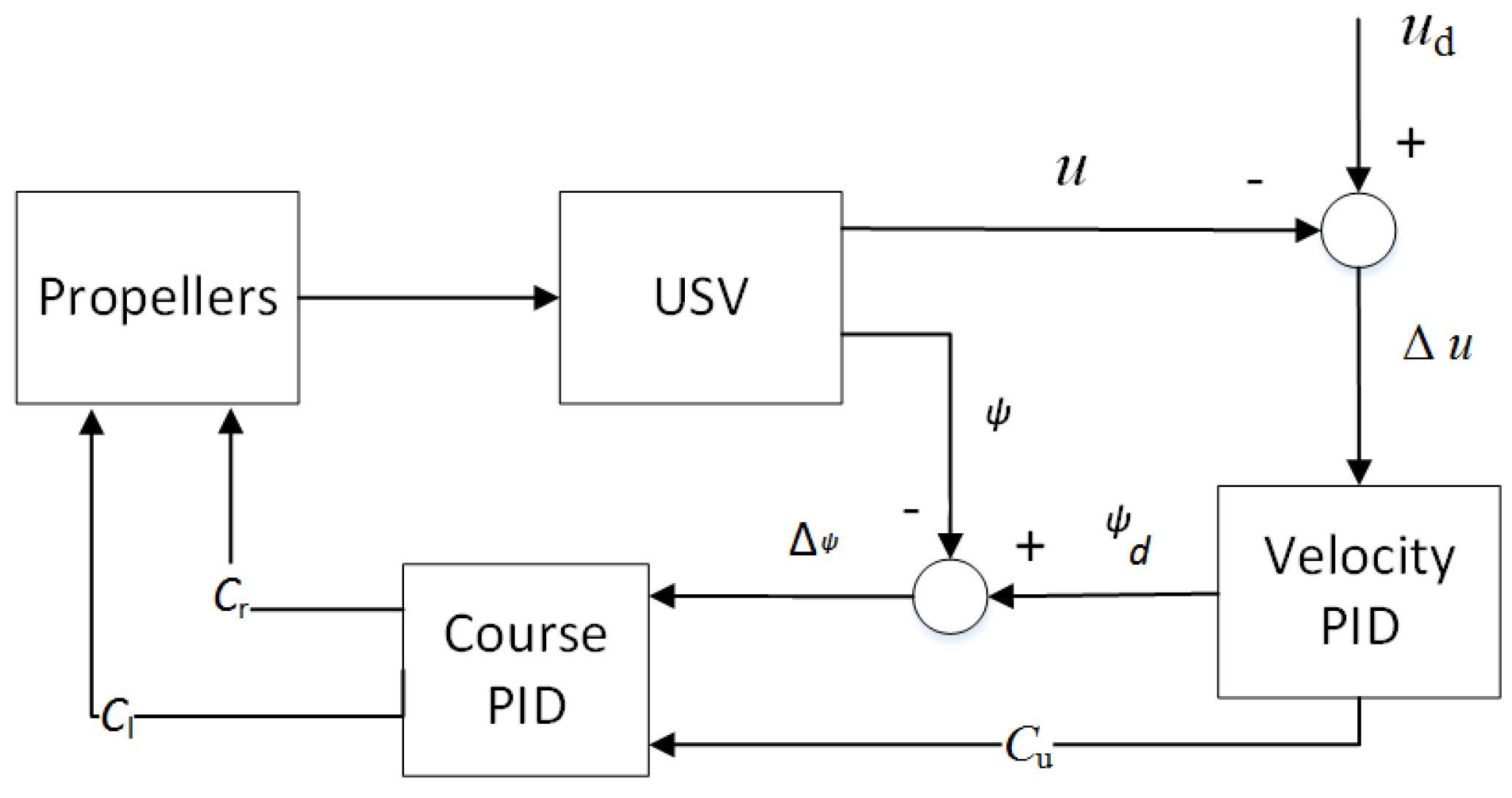
- In the control level, a twin-PID controller is designed for the course and speed control, which is independent on the model and can be realized in the actual USV.
- The first one is that the improved LOS guidance law is suitable for all the USVs which need not consider the dynamic features.
- The second one is that the dynamic features of the USV system can be described by the motion limitator.
- The third one is that the trajectory tracking of the TPTH-USV is realized easily by regulating some parameters of the motion limitator and PID controllers.
- The last one is that the proposed scheme can be simultaneously used in path following and trajectory tracking, which depends on the constant or variable expected speed of the USV, respectively.
2. Three-Layered Architecture Scheme for Trajectory Tracking and ‘Jiuhang 490’ USV
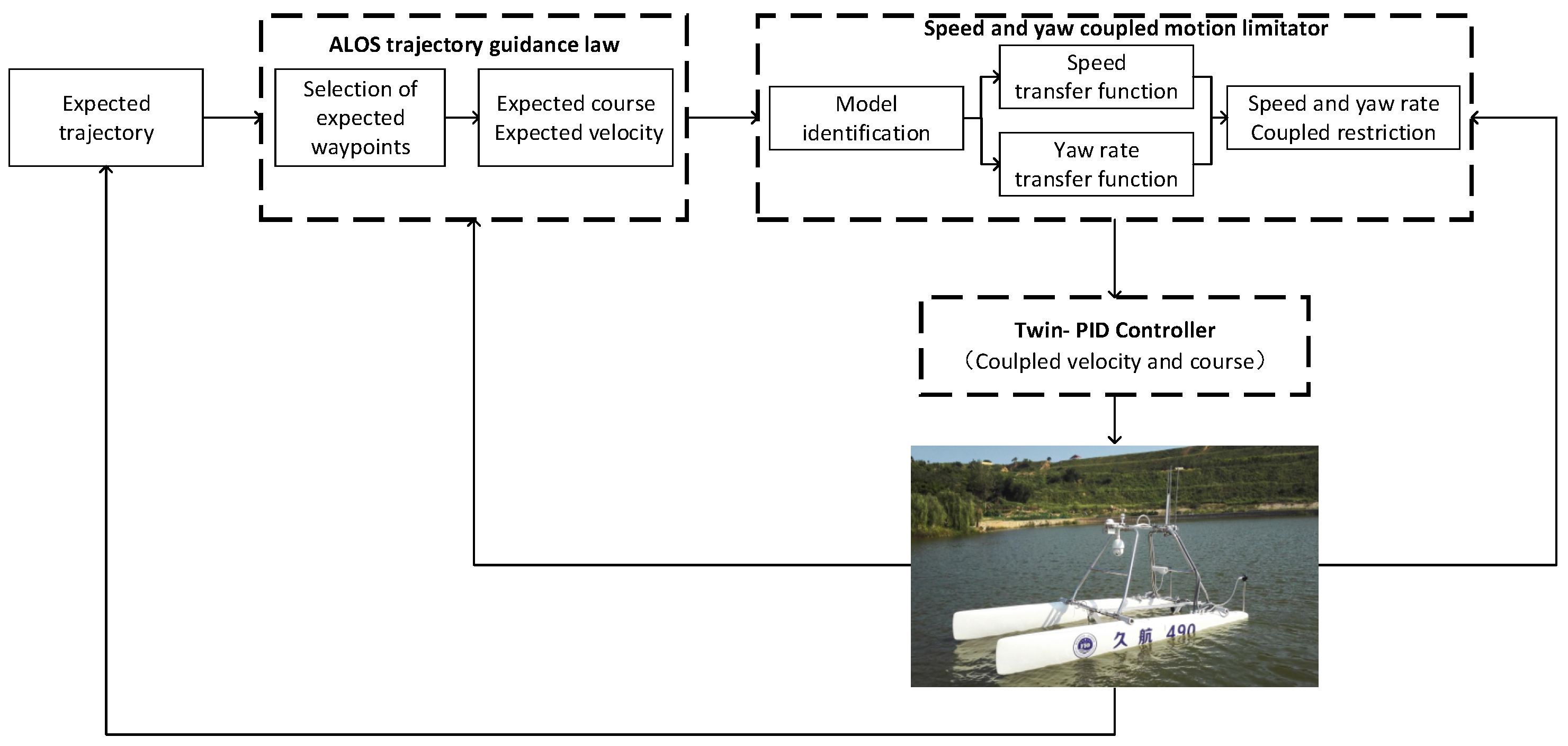
2.1. Three-Layered Architecture Scheme
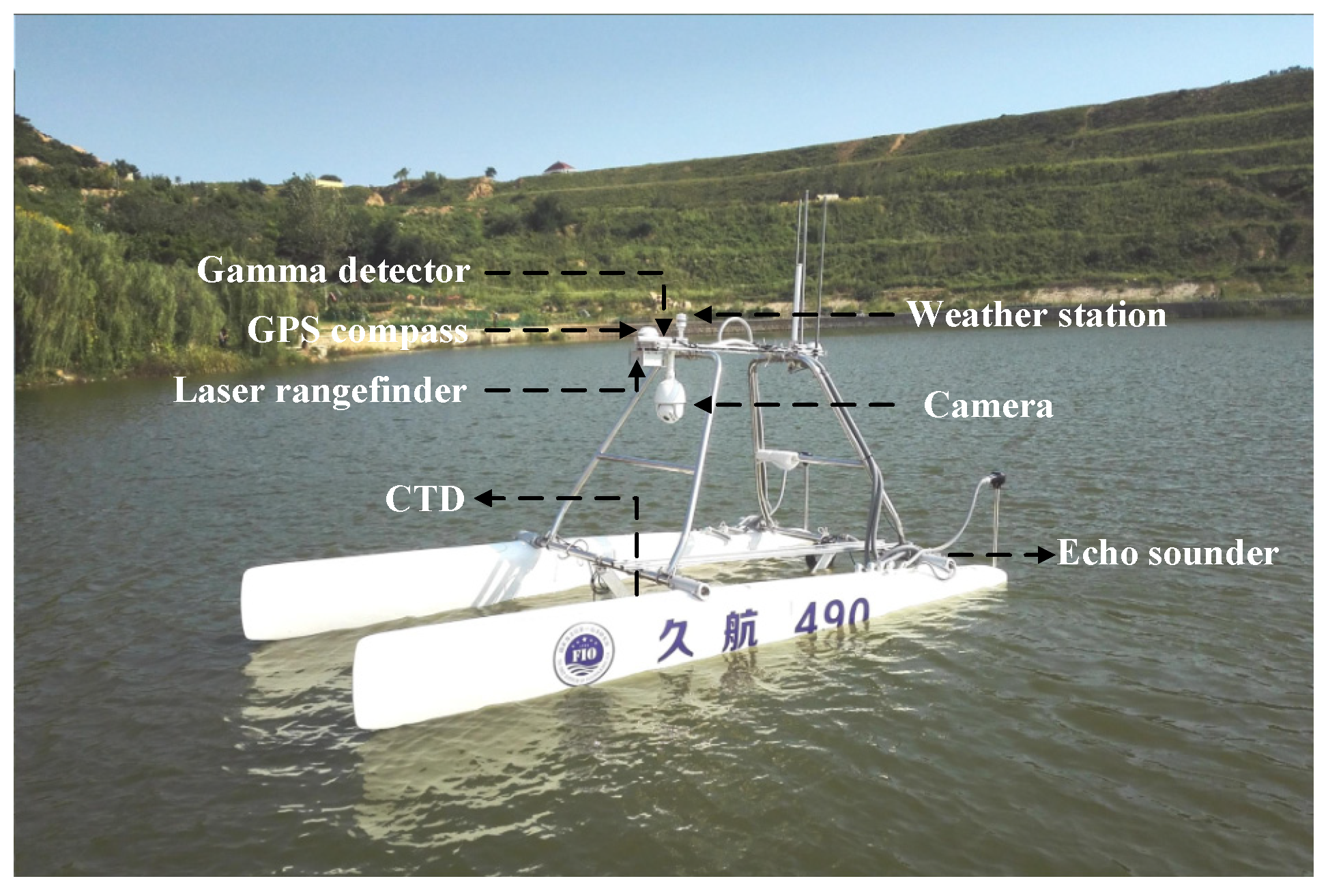
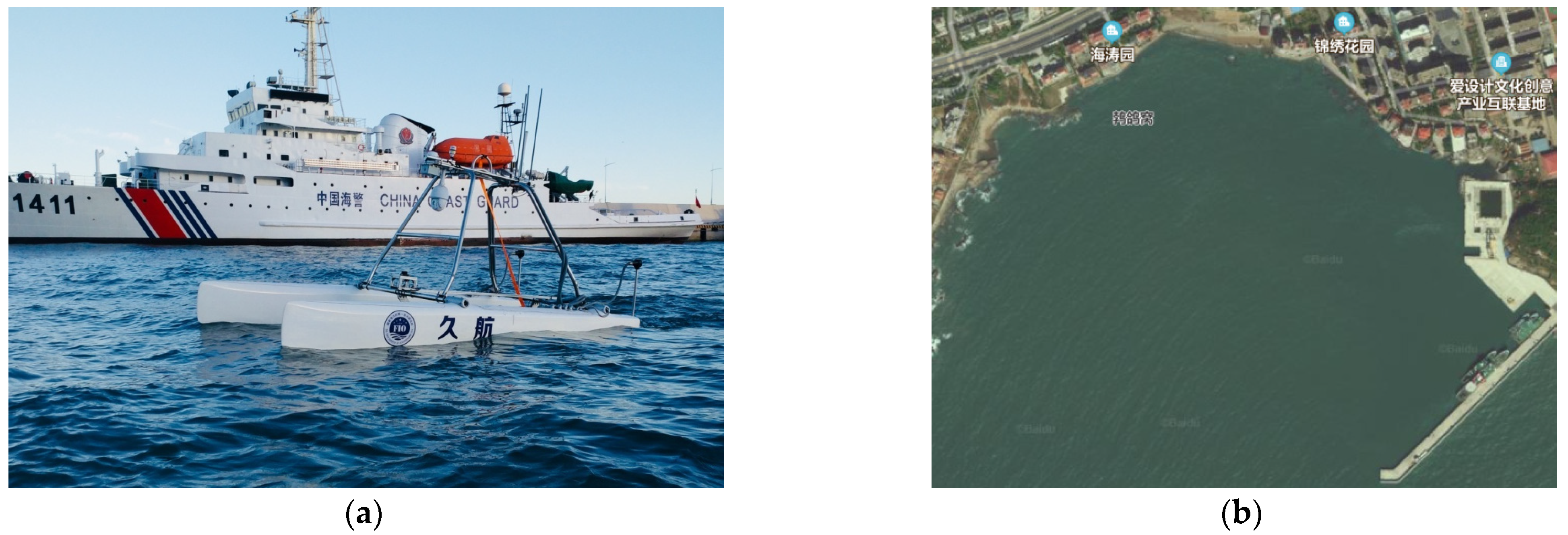
2.2. ‘Jiuhang 490’ USV
3. Implement of Trajectory Tracking
3.1. Assumptions
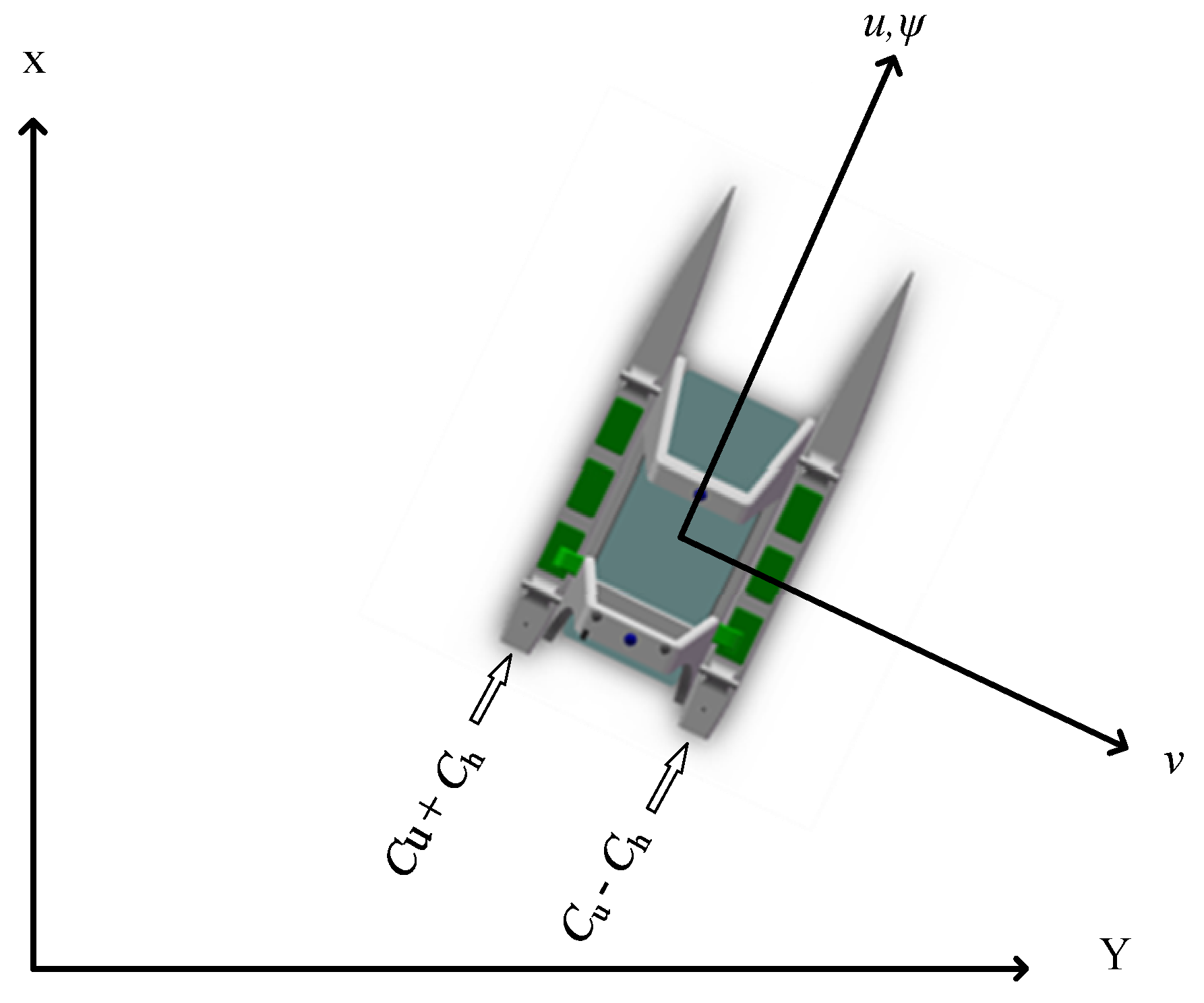
- The motion of the USV in roll, pitch and heave directions was neglected, so the motion of the USV was described by three degrees of freedom (DOM), which were surge, sway and yaw.
- The USV had a neutral buoyancy and the origin of the body-fixed coordinate was located at the center of mass.
- The USV was port-starboard symmetric.
- The dynamic equations of the USV did not include the disturbance forces (waves, wind and ocean currents).
- The expected trajectory was of twice continuous differentiability.
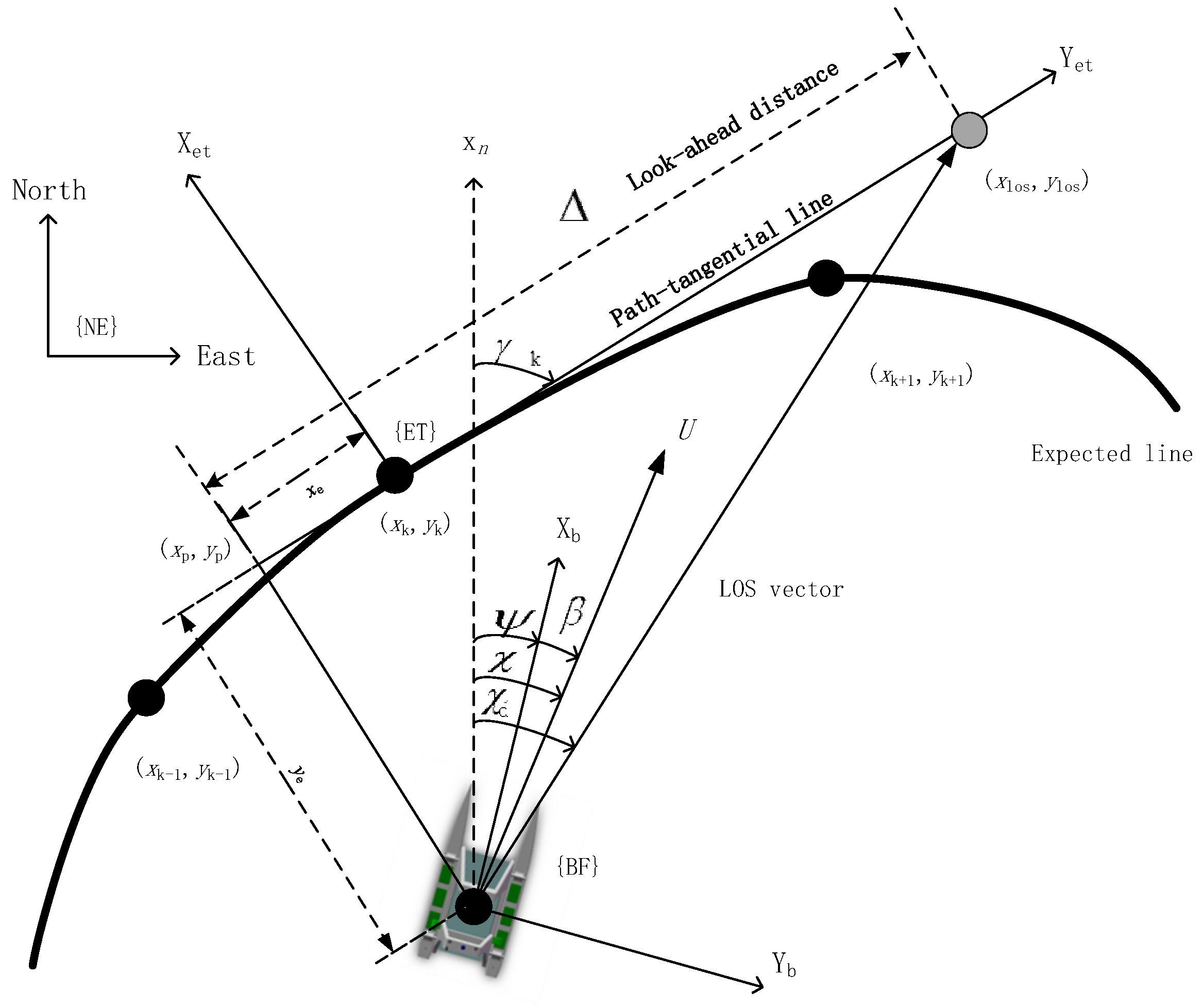
3.2. Trajectory Guidance Law for Curved Line
3.2.1. Selection of Expected Waypoints
3.2.2. Adaptive LOS Law
3.3. Motion Limitator
3.3.1. Motion Model
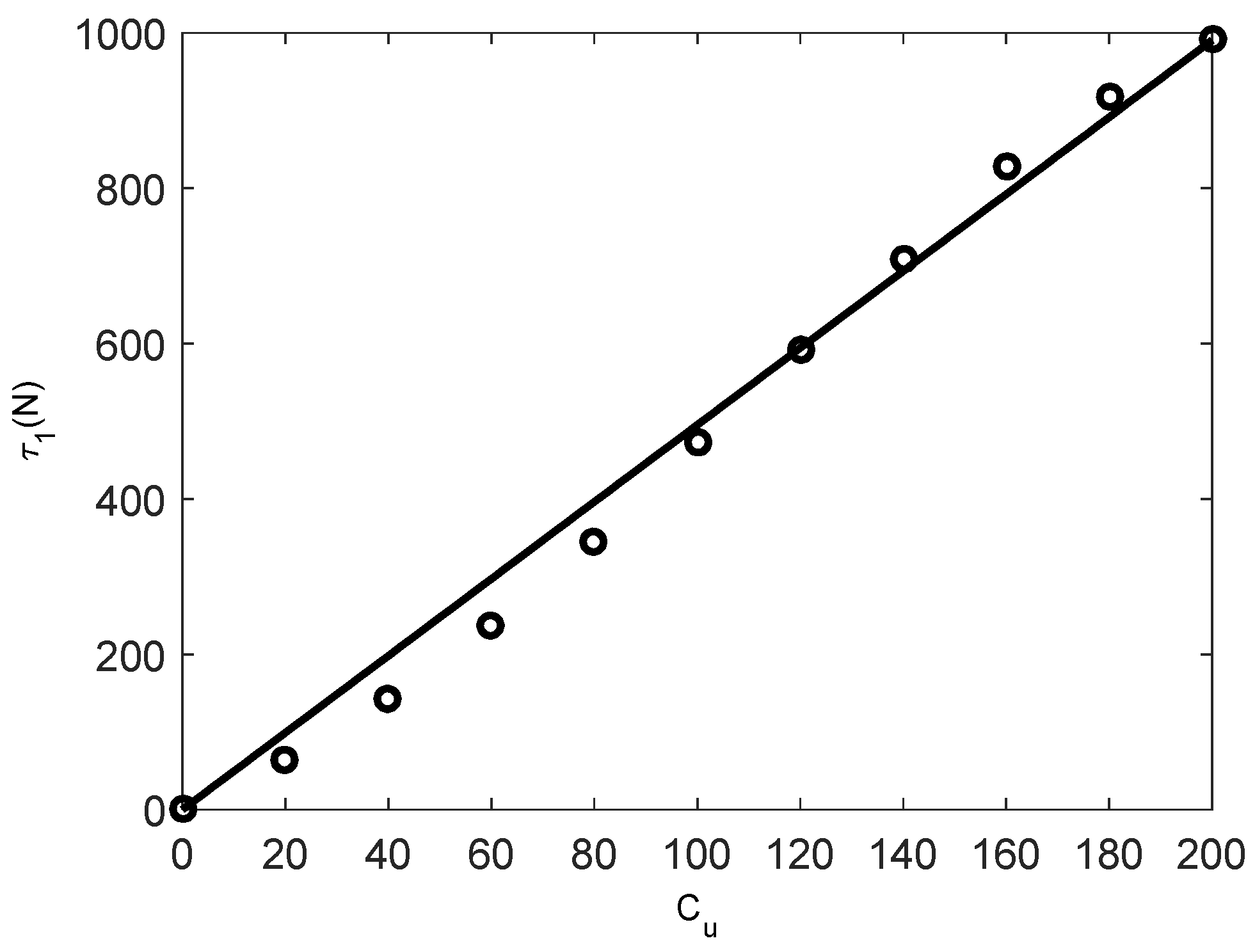
3.3.2. Model Identification for Surge Motion
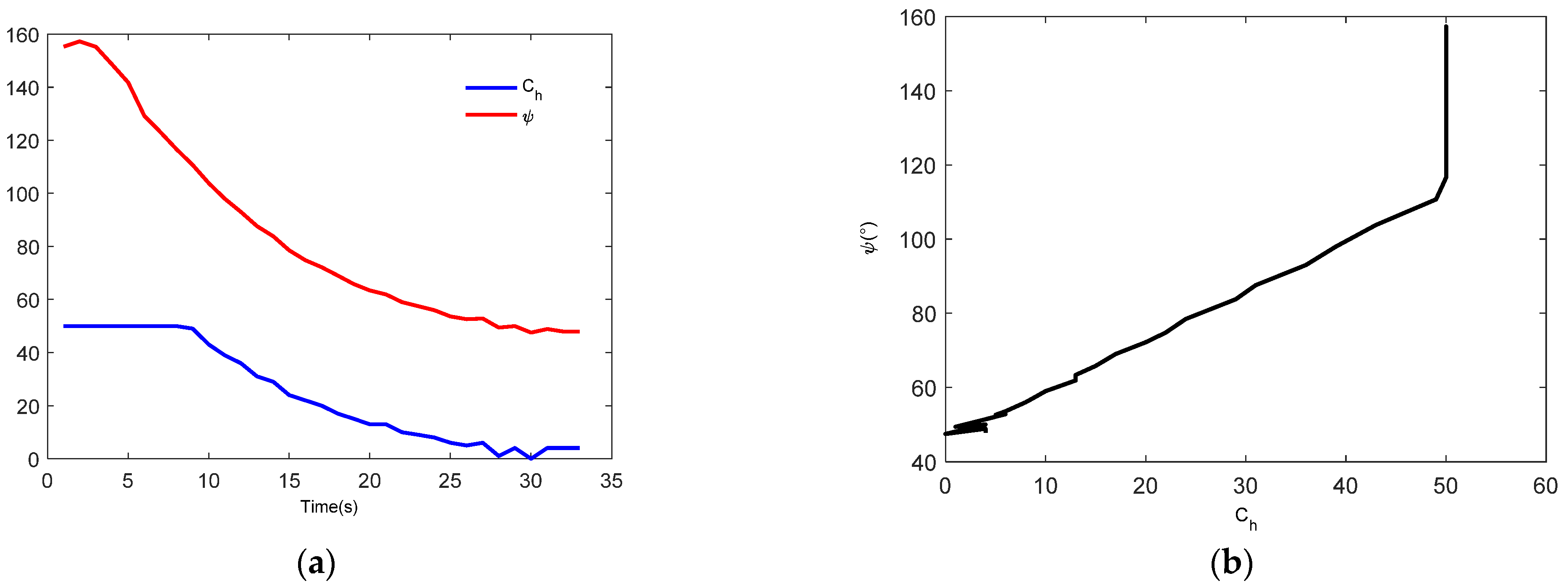
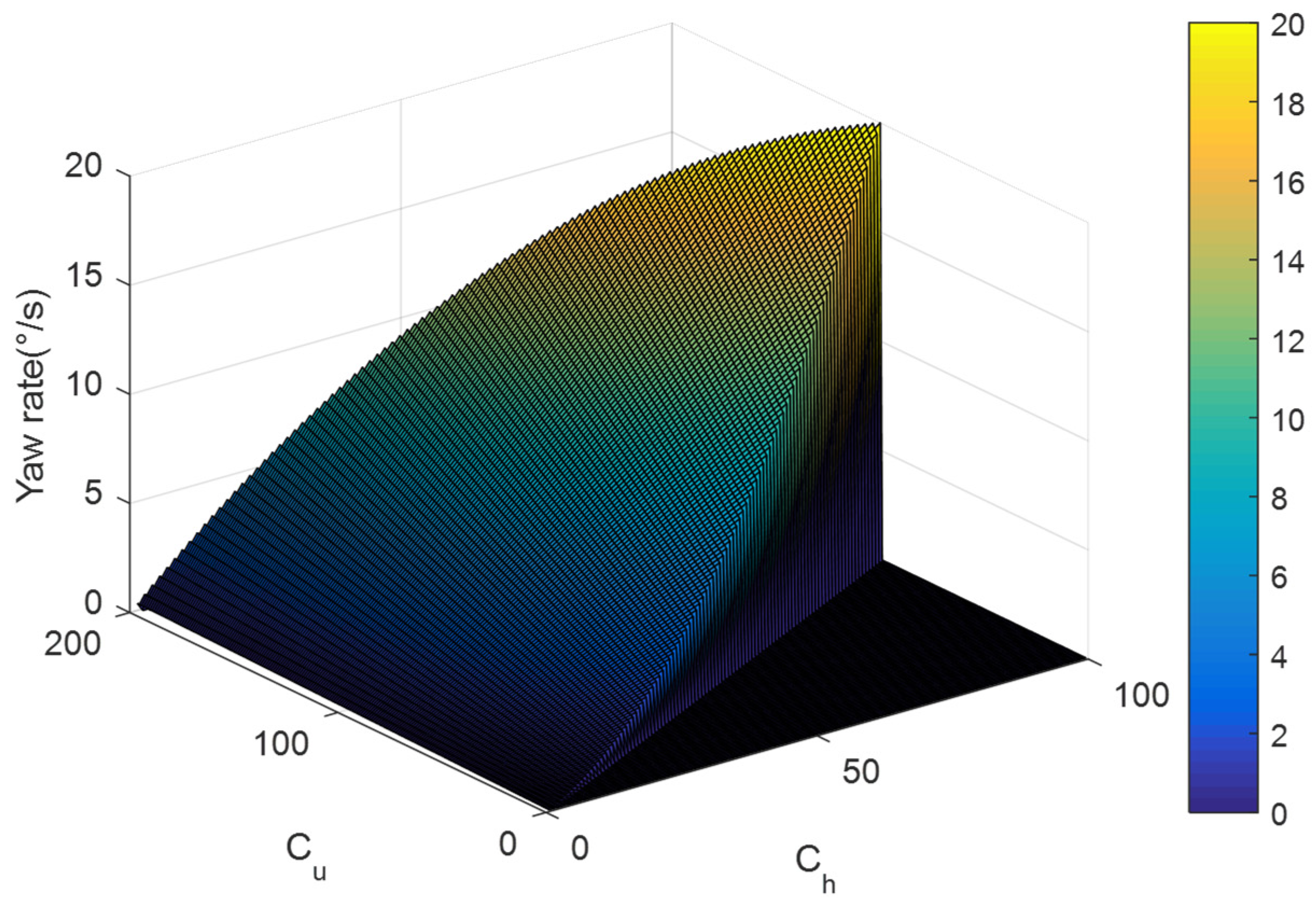
3.3.3. Model Identification for Yaw Motion
3.4. Controllers
4. Result of Sea Experiments
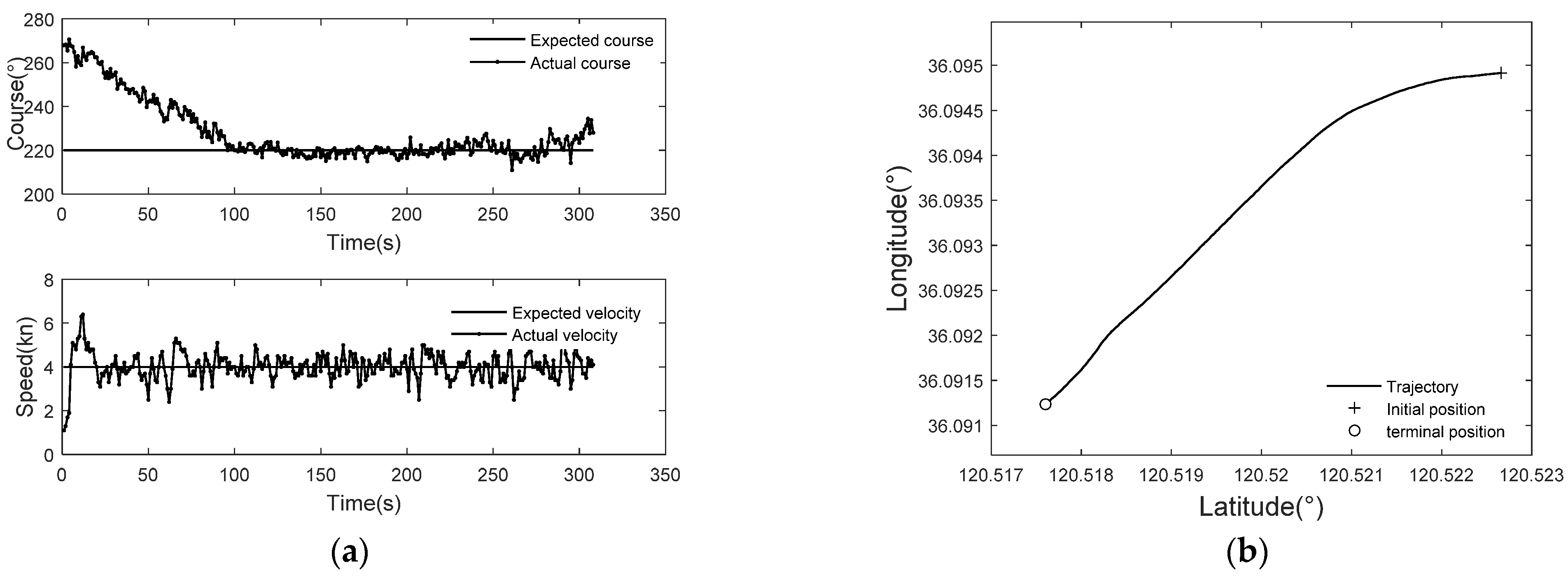
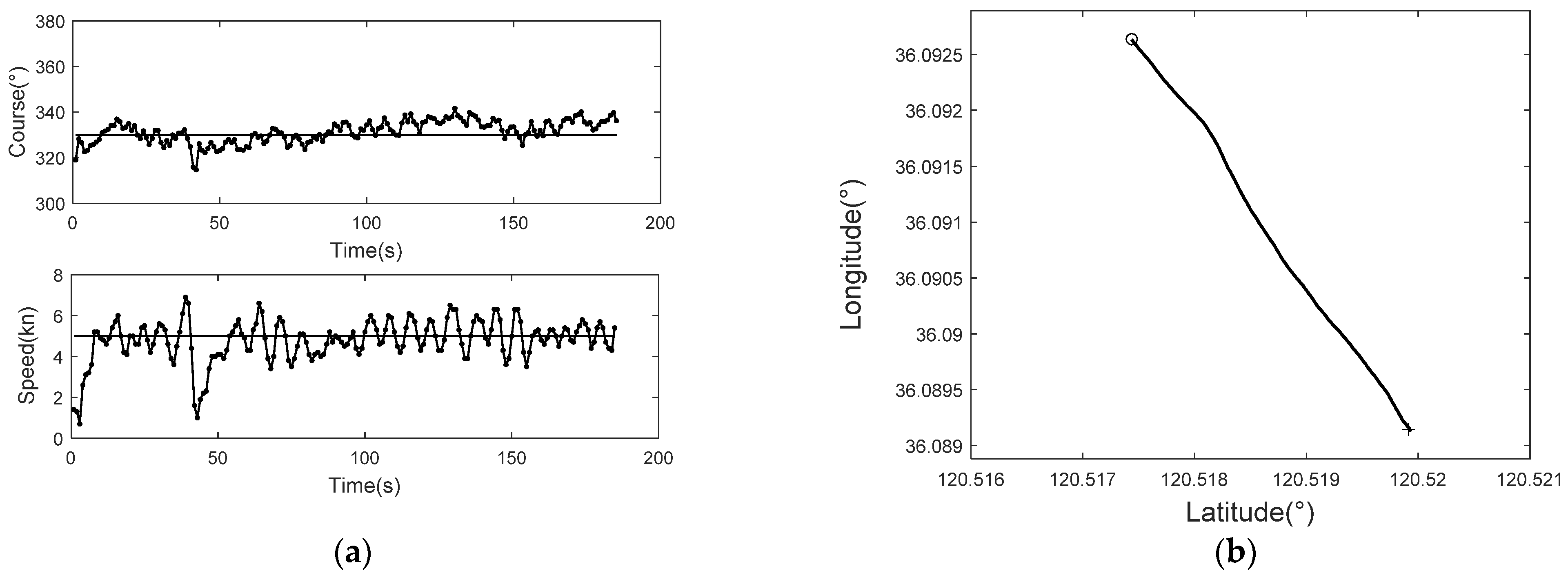
4.1. Dynamics Control Results
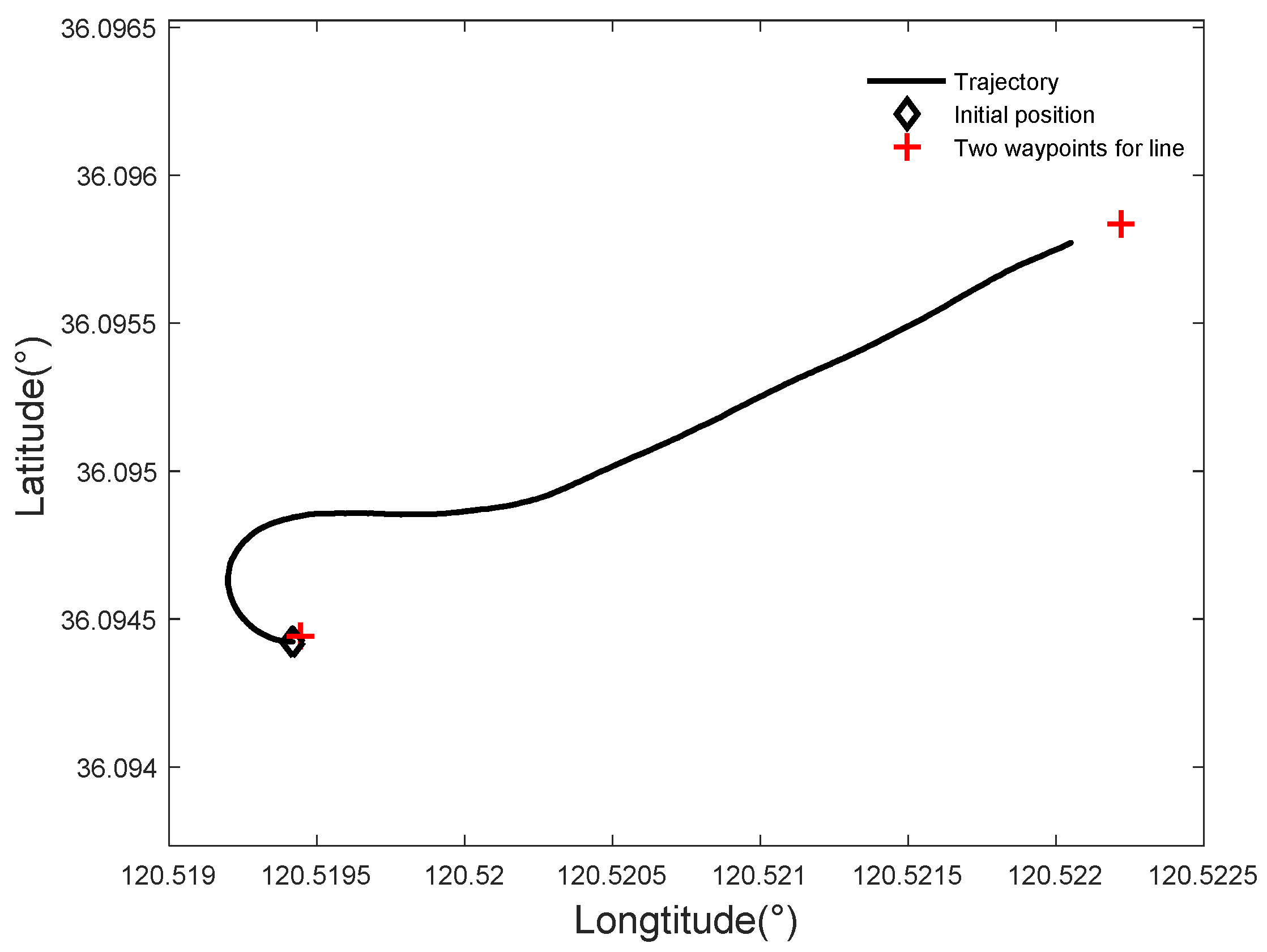
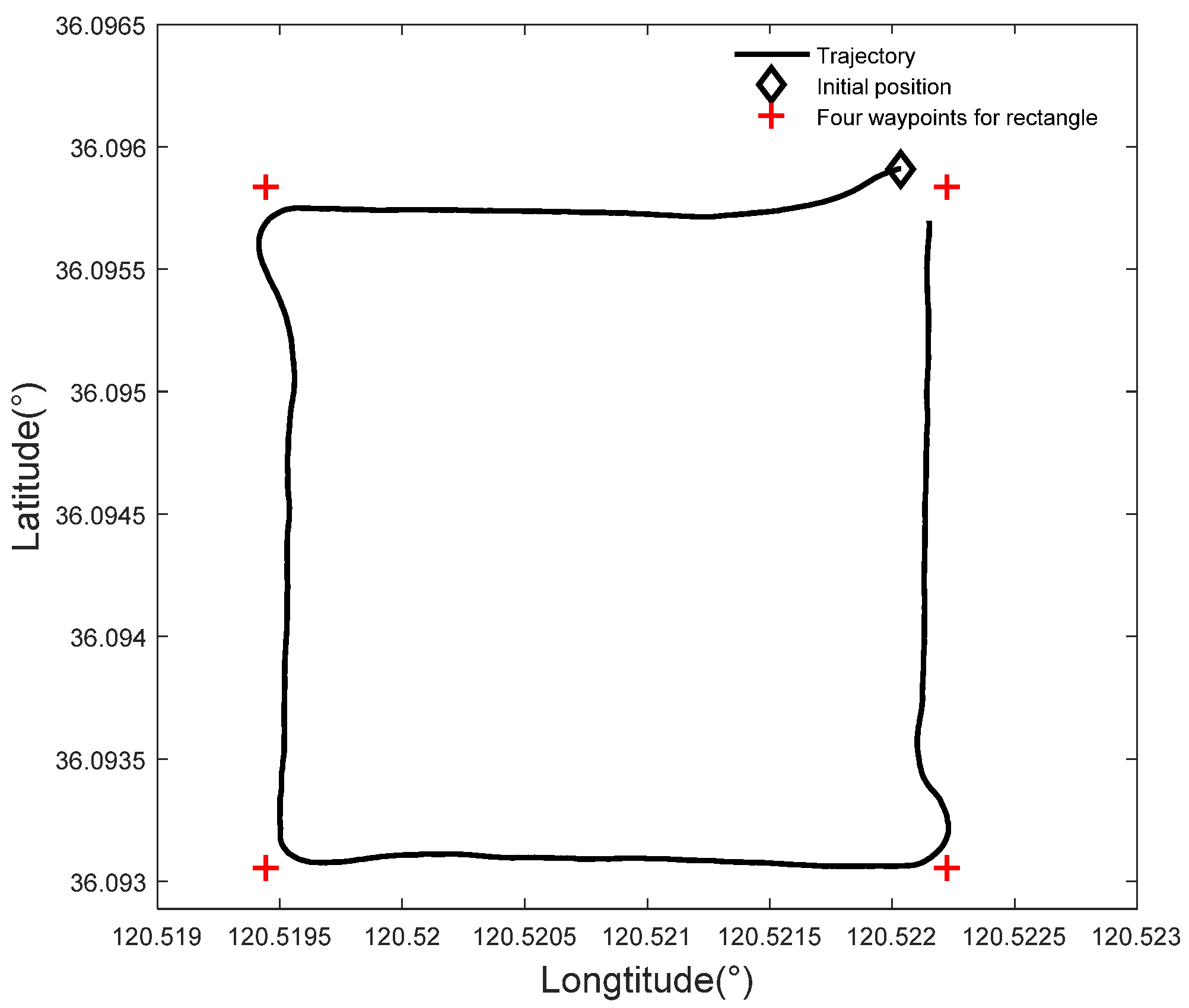
4.2. Trajectory Tracking Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Z.; Yang, S.L.; Xiang, X.B.; Vasilijević, A.; Mišković, N.; Nađ, Đ. Cloud-based mission control of USV fleet: Architecture, implementation and experiments. Control Eng. Pract. 2021, 106, 104657. [Google Scholar] [CrossRef]
- Jimenez, J.F.; Giron-Sierra, J.M. USV based automatic deployment of booms along quayside mooring ships Scaled experiments and simulations. Ocean Eng. 2020, 207, 107438. [Google Scholar] [CrossRef]
- Jin, J.C.; Zhang, J.; Shao, F.; Lv, Z.C.; Wang, D. A novel ocean bathymetry technologybased on Unmanned Surface Vehicle. Acta Oceanol. Sin. 2018, 37, 99–106. [Google Scholar] [CrossRef]
- Kim, H.W.; Lee, J. Robust sliding mode control for a USV water-jet system. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 851–857. [Google Scholar] [CrossRef]
- Niu, H.L.; Ji, Z.; Savvaris, A.; Tsourdos, A. Energy efficient path planning for Unmanned Surface Vehicle in spatially-temporally variant environment. Ocean Eng. 2020, 196, 106766. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.-H.; Thanh, H.L.N.N.; Huynh, T.-T.; Van, M.; Hoang, Q.-D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.B.; Gong, M.; Zhuang, Y.F.; Sharma, S.; Xu, D.G. A new guidance law for trajectory tracking of an underactuated unmanned surface vehicle with parameter perturbations. Ocean Eng. 2019, 175, 217–222. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Li, Z.; Sun, J.; Oh, S. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels. Automatica 2009, 45, 1649–1658. [Google Scholar] [CrossRef]
- Park, B.S.; Kwon, J.W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Bibuli, M.; Bruzzone, G.; Caccia, M.; Lapierre, L. Path-Following algorithms and experiments for an Unmanned Surface Vehicle. J. Field Robot. 2009, 26, 669–688. [Google Scholar] [CrossRef] [Green Version]
- Sciavicco, L.; Siciliano, B. Modelling and Control of Robot Manipulators; Springer: London, UK, 2002. [Google Scholar]
- Breivik, M.; Fossen, T.I. Guidance Laws for Planar Motion Control. In Proceedings of the47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 570–577. [Google Scholar]
- Li, Y.; Wang, L.F.; Liao, Y.L.; Jiang, Q.; Pan, K. Heading MFA control for unmanned surface vehicle with angular velocity guidance. Appl. Ocean Res. 2018, 80, 57–65. [Google Scholar] [CrossRef]
- Jin, J.C.; Zhang, J.; Liu, D.Q. Design and Verification of Heading and Velocity Coupled Nonlinear Controller for Unmanned Surface Vehicle. Sensors 2018, 18, 3427. [Google Scholar] [CrossRef] [Green Version]
- Larrazabal, J.M.; Peñas, S. Intelligent rudder control of an unmanned surface vessel. Expert Syst. Appl. 2016, 55, 106–117. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control, 1st ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2015, 31, 445–463. [Google Scholar] [CrossRef]
- Paliotta, C.; Lefeber, E.; Pettersen, K.Y.; Pinto, J.; Costa, M.; de Sousa, J.T.d.F.B. Trajectory Tracking and Path Following for Underactuated Marine Vehicles. IEEE Trans. Control Syst. Technol. 2019, 27, 1423–1437. [Google Scholar] [CrossRef] [Green Version]
- Li, M.C.; Guo, C.; Yu, H.M. Filtered Extended State Observer Based Line-of-Sight Guidance for Path Following of Unmanned Surface Vehicles With Unknown Dynamics and Disturbances. IEEE Access 2019, 7, 178401–178412. [Google Scholar] [CrossRef]
- Liu, T.; Dong, Z.P.; Du, H.W.; Song, L.F.; Mao, Y.S. USV based on the improved Line-of-sight guidance algorithm. Pol. Marit. Res. 2017, 24, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.W.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Qiu, B.B.; Wang, G.F.; Fan, Y.S. Predictor LOS-based trajectory linearization control for path following of underactuated unmanned surface vehicle with input saturation. Ocean Eng. 2020, 214, 107874. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. A bioinspired neural dynamics-based approach to tracking control of autonomous surface vehicles subject to unknown ocean currents. Neural Comput. Appl. 2015, 26, 1929–1938. [Google Scholar] [CrossRef]
- Etemad, M.; Zare, N.; Sarvmaili, M.; Soares, A.; Brandoli, M.B.; Matwin, S. Using Deep Reinforcement Learning Methods for Autonomous Vessels in 2D Environments. In Advances in Artificial Intelligence; Goutte, C., Zhu, X., Eds.; Springer: Ottawa, ON, Canada, 2020; pp. 220–231. [Google Scholar]
- Xu, H.T.; Guedes Soares, C. Vector field path following for surface marine vessel and parameter identification based on LS-SVM. Ocean Eng. 2016, 113, 151–161. [Google Scholar] [CrossRef]
- Sukas, O.F.; Kinaci, O.K.; Balo, S. System-based prediction of maneuvering performance of twin-propeller and twin-rudder ship using a modular mathematical model. Appl. Ocean Res. 2019, 84, 145–162. [Google Scholar] [CrossRef]
- Annamalai, A.; Sutton, R.; Yang, C.; Culverhouse, P.; Sharma, S. Robust Adaptive Control of an Uninhabited Surface Vehicle. J. Intell. Robot. Syst. 2015, 78, 319–338. [Google Scholar] [CrossRef] [Green Version]
- Jin, J.C.; Zhang, J.; Liu, D.Q.; Shao, F.; Wang, D.; Shi, J.N.; Li, F.X. Design and Experiment for an Offshore Nuclear Radiation Emergent Observation System based on an Unmanned Surface Vehicle. J. Coast. Res. 2019, S90, 35–40. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.-T.; Lee, S.-D.; Choi, H.-S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Expected Course/Speed | RMSE of Course Control | RMSE of Speed Control |
|---|---|---|---|
| 1 | 330°/5 kn * | 5.0° | 1.1 kn |
| 2 | 220°/4 kn * | 3.5° | 0.5 kn |
| 3 | 315°/4 kn | 5.2° | 0.7 kn |
| 4 | 280°/3 kn | 5.7° | 0.4 kn |
| 5 | 130°/2 kn | 5.3° | 0.5 kn |
| 6 | 10°/2 kn | 7.3° | 0.7 kn |
| 7 | 330°/1 kn | 30.7° | 0.3 kn |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, J.; Liu, D.; Wang, D.; Ma, Y. A Practical Trajectory Tracking Scheme for a Twin-Propeller Twin-Hull Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2021, 9, 1070. https://doi.org/10.3390/jmse9101070
Jin J, Liu D, Wang D, Ma Y. A Practical Trajectory Tracking Scheme for a Twin-Propeller Twin-Hull Unmanned Surface Vehicle. Journal of Marine Science and Engineering. 2021; 9(10):1070. https://doi.org/10.3390/jmse9101070
Chicago/Turabian StyleJin, Jiucai, Deqing Liu, Dong Wang, and Yi Ma. 2021. "A Practical Trajectory Tracking Scheme for a Twin-Propeller Twin-Hull Unmanned Surface Vehicle" Journal of Marine Science and Engineering 9, no. 10: 1070. https://doi.org/10.3390/jmse9101070
APA StyleJin, J., Liu, D., Wang, D., & Ma, Y. (2021). A Practical Trajectory Tracking Scheme for a Twin-Propeller Twin-Hull Unmanned Surface Vehicle. Journal of Marine Science and Engineering, 9(10), 1070. https://doi.org/10.3390/jmse9101070