1. Introduction
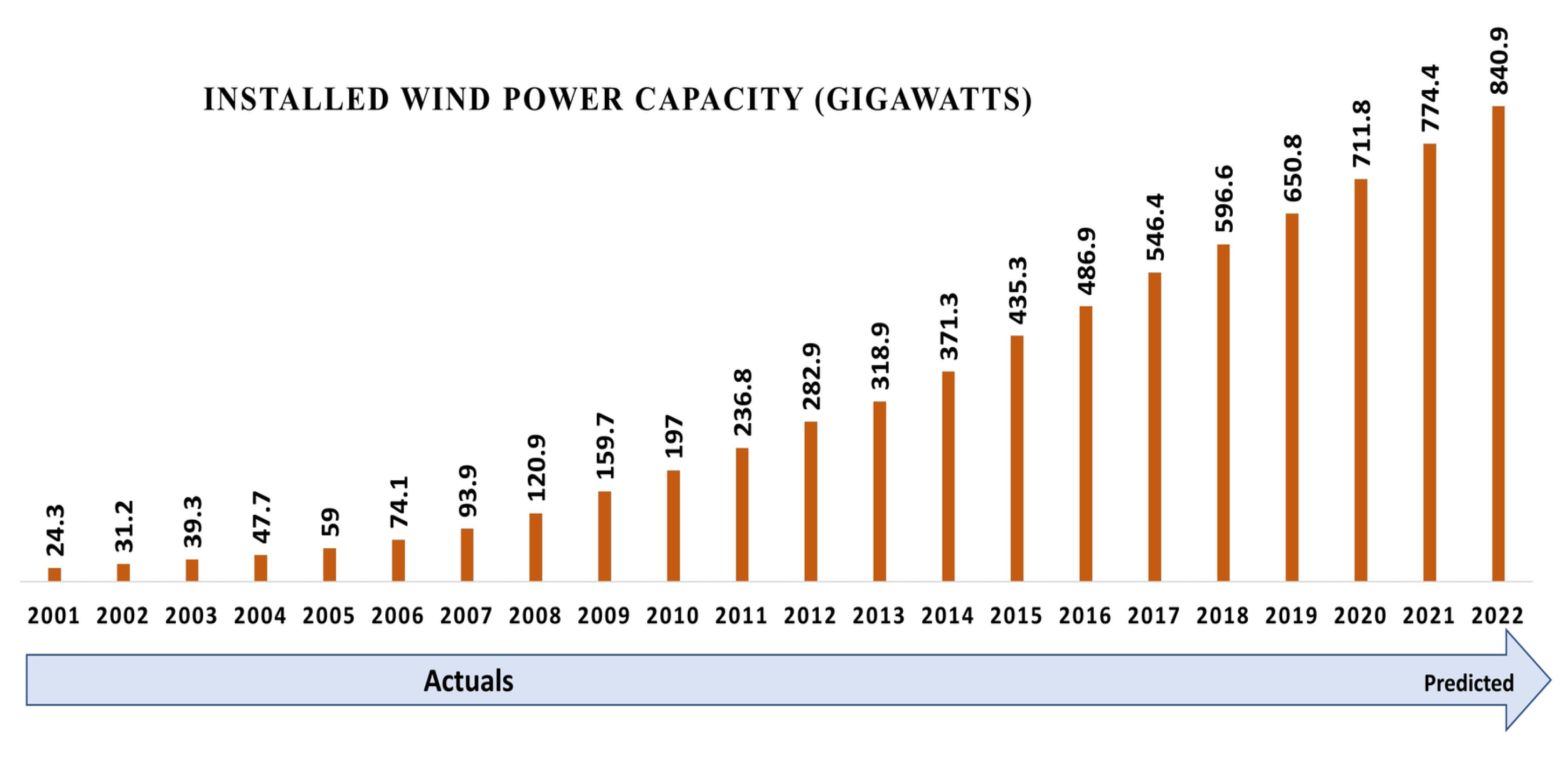
With the ever-increasing prices, the increasing need for conventional fuels, and the decline in their availability, renewable energy resources such as wind energy are gaining immense popularity. Moreover, it is a form of green energy that is environment friendly. Globally, a remarkable increase is observed in the installation of wind power plants consistently [
1,
2] as depicted in
Figure 1. By the year 2022, the global installed wind capacity will reach 840 GW. The basic nature of wind being extremely fluctuating, the optimal speed of the generator has to be maintained to obtain maximum yield of energy from WECS. Therefore, tracking the MPP is very popular and extremely important for ensuring the maximum capture of energy from the WECS for different varying speeds of the wind.
As portrayed in
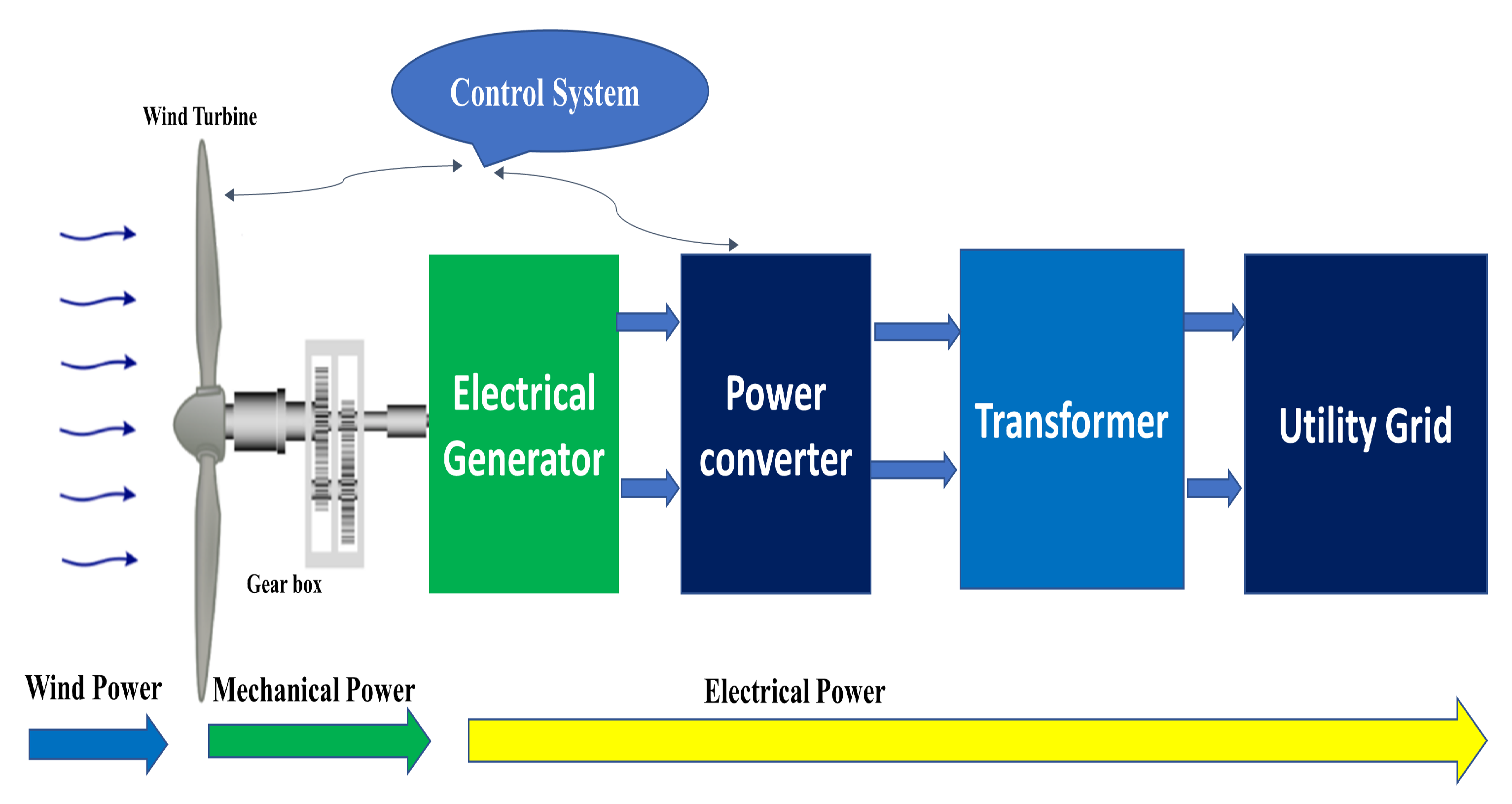
Figure 2, the kinetic energy present in the wind serves as an input to the WECS. The output of the WECS becomes fluctuating as the continuous changes in the speed of the wind influence it. The most important function of a WT is to provide mechanical energy by transforming the kinetic energy present in the wind, which can then drive the generator to produce clean electrical energy. Maximum energy extraction is possible for all variable speeds of the wind as the wind turbine with variable speed has a speed shaft that is adjustable [
4,
5]. WT’s are categorized as the horizontal axis wind turbine (HAWT) and the vertical axis wind turbine (VAWT), considering their axis of rotation [
6]. The axis around which the WT rotates in VAWT is at a right angle to the ground, while the remaining assembly is placed on the ground. The VAWT has various drawbacks, such as those related to the blade lift forces, and another major drawback is the problem of the lower capacity of generation [
7,
8]. On the other hand, there are considerable advantages of the HAWT such as better aerodynamic performance, drive train loading is balanced, and their cost is low. The three-blade design is the most prevalent in the present-day industry [
9]. The WT’s are also categorized as wind turbines with variable speed (VSWT) and wind turbines with fixed speed (FSWT). There are numerous issues with the FSWT, such as the huge mechanical stress, a limited range for speed of operation, and gear with multiple stages is required [
10]. To overcome the drawbacks of the FSWT, the VSWT is preferred [
11]. The main benefit of using the VSWT is obtaining maximum power for each wind speed along with reduced mechanical stress and power supply fluctuations [
12,
13,
14].
There are various kinds of generators employed for the WECS. The Squirrel cage induction generators (SCIG’s) can be counted as a low-cost, reliable, and simple option available for WECS [
15]. Doubly fed induction generators (DFIG’s) alternatively are also preferred for WECS as they are economical when used with the power converters. The only issue with them is the requirement of a multi-stage gearbox, and also they need excitation [
16,
17,
18]. Finally, permanent magnet synchronous generators(PMSG’s) are attracting researchers due to higher efficiency and reliability, better performance, and better fault ride-through (FRT) capability [
19,
20,
21,
22]. A review of the generators for WECS is given in [
10,
11,
17]. From the available energy possessed by the wind, only 59% is extracted by the WT by Betz limit. Therefore, the power present in the air is given as in Equation (
1).
The density of air is represented by
, the area swept by the blades of the turbines is represented by
A in
, and the speed of the wind in (m/s) is represented by
V. The tip speed ratio (TSR), represented by
is given as in Equation (
2).
R represents the radius of the turbine blade, and
represents the angular speed which is given in rad/s. The air density is a variable parameter that may change from season to season and can be different at different locations.
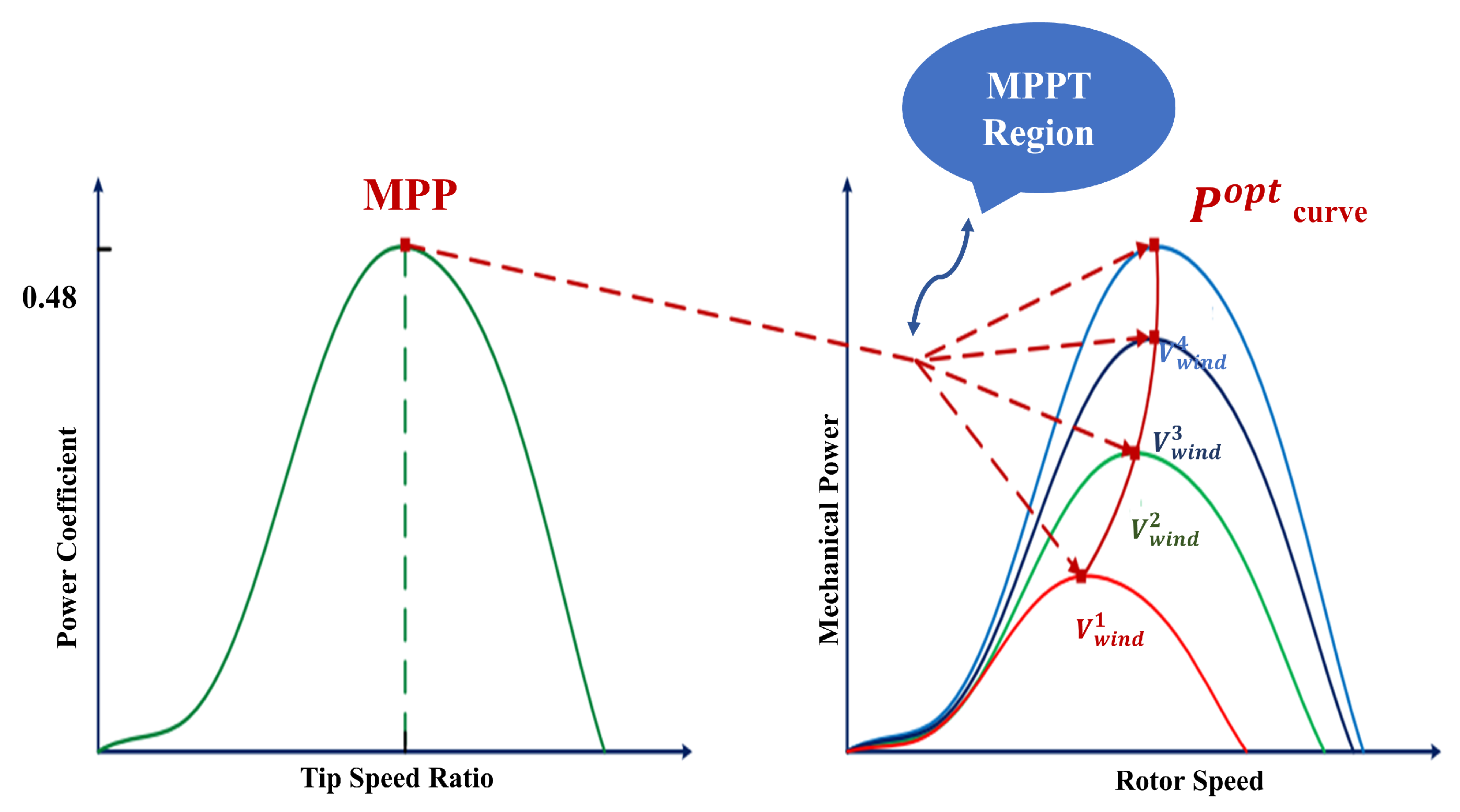
represents the power coefficient. Its maximum value is given by Equation (
3) and it is limited to less than 59% by the Betz limit.
represents the power absorbed by the WT from the wind, and
represents the power present in the wind. The parameter
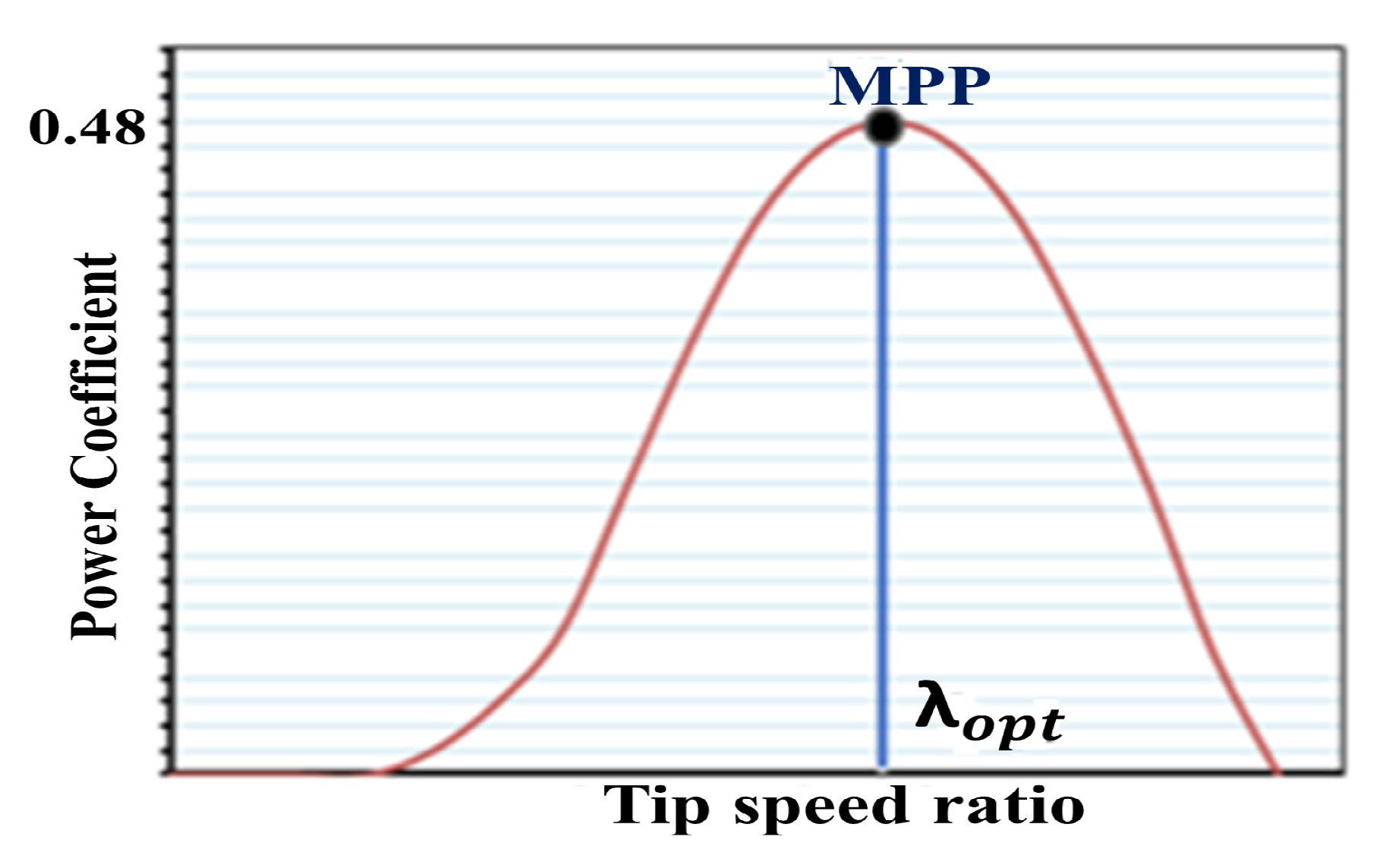
is dependent on the values of
and the pitch angle
. The relation between
and TSR is shown in
Figure 3. From the graph, we can comment that the
has the highest value
as 0.48 for a particular value of
. This optimal value is useful in tracking the maximum power.
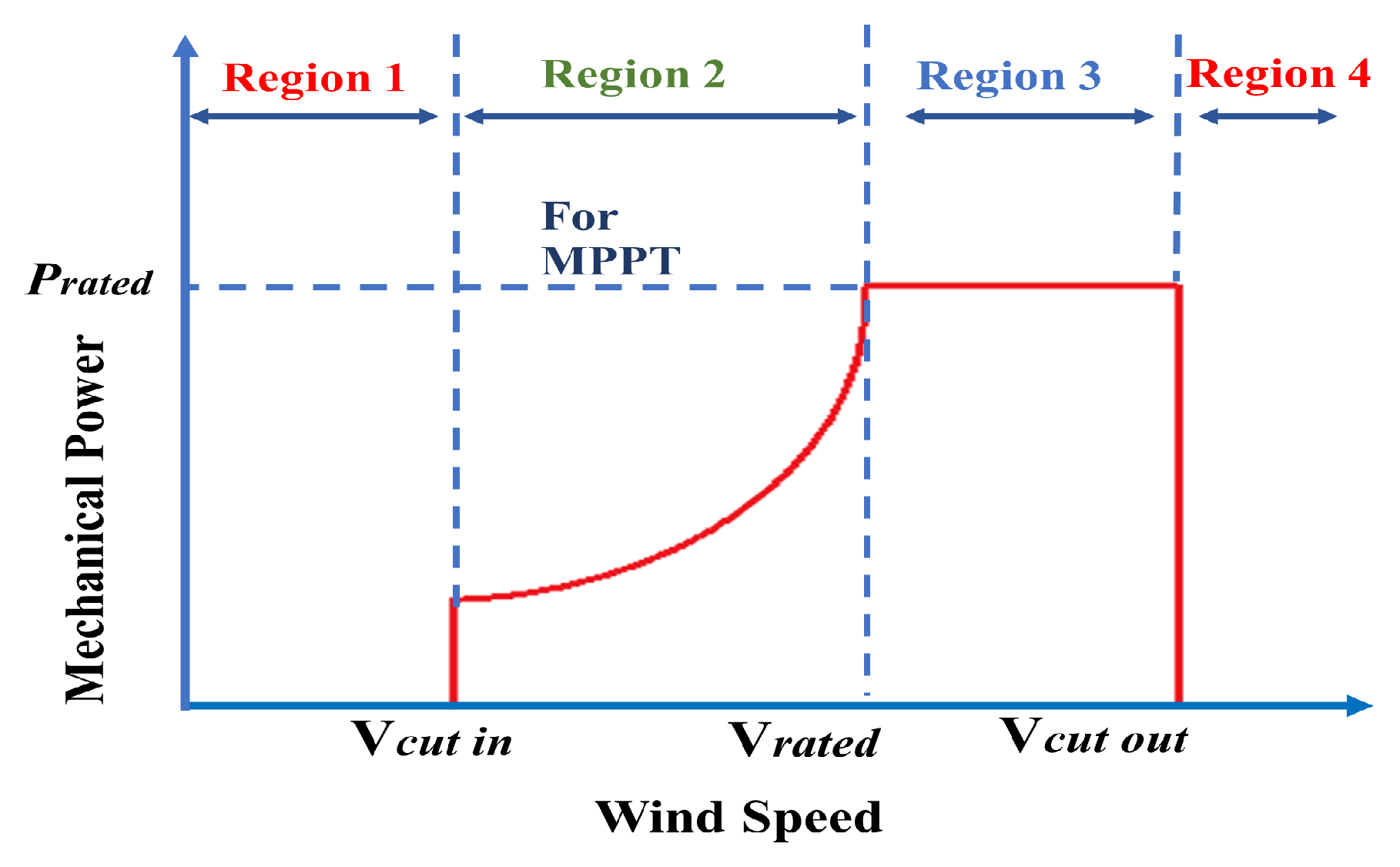
Figure 4 depicts the different regions of operation for WECS and the region for MPPT. There is no generation for all the velocities below the cut-in value as it is the minimum required speed to start generating usable power. The speed at which rated usable power is generated is the rated speed. The maximum power is extracted in region two that lies between the
and
.
Figure 5 portrays the relation between optimal values of
and
and explains the concept of MPPT for WECS. Various MPPT controllers are described in the literature, and all of them operate in this region and capture the maximum amount of power contained in the wind. Hence, this region is crucially important while considering the maximum extraction of power. The major focus of the MPPT algorithms described in this paper is on this region of operation.
The performance of WECS is affected by the control strategies that are employed. A review of the control strategies is presented in [
25,
26,
27]. The control strategies are highly influenced by the integration of the MPPT algorithm for the WECS. Therefore, these advanced control techniques must produce minimum disturbances when these MPPT algorithms are implemented for WECS [
28,
29,
30,
31].
MPPT algorithms help in tracking and extracting maximum power from WECS. A large variety of algorithms are available. Based on the requirement of speed sensors for measurement of wind speed, MPPT methods employed are categorized into methods employing speed sensors and methods that do not employ speed sensors to estimate the speed of the wind. In the MPPT algorithms that use speed sensors for wind speed measurements, sensors such as anemometers are used. The MPPT algorithms such as tip speed ratio (TSR) and power signal flow (PSF) fall into the category of speed sensor based MPPT methods and perturb and observe (P&O), optimal relation based (ORB), and incremental conductance (INC) fall under the category of MPPT algorithms that do not employ wind speed sensors. Different hybrid techniques are also available in the literature that enables overcoming the drawbacks of the conventional algorithms mentioned above, and they facilitate the capture of maximum from WECS as they are formed by merging two or more conventional techniques. Smart MPPT algorithms are also proposed in the literature based on intelligent techniques such as neural networks (NN) and fuzzy logic controller (FLC). Different hybrid algorithms are available, which are a combination of optimization algorithms and the conventional MPPT algorithms to get maximum power from WECS [
32].
Many review articles have given a comprehensive review of the MPPT algorithms for WECS [
32,
33,
34,
35,
36,
37]. In this paper, various algorithms of the past and present are described that are used for tracking and obtaining maximum power output from WECS along with the description of the recent advancements in the P&O based modified versions and the smart and hybrid versions available in the literature. The algorithms are classified based on the direct and indirect power measurement, hybrid and smart MPPT algorithms, and they are compared concerning parameters such as complexity, convergence speed, use of sensors, memory requirement, need of prior knowledge of system parameters, etc.
The organization of the remaining part of the paper is as follows,
Section 2 explains the concept of MPPT for WECS followed by the classification and description of the conventional, modified, smart and hybrid MPPT algorithms with their classification. The references are summarized for these methods.
Section 3 presents the discussion, and the trends and future scope are discussed in
Section 4. A brief conclusion is presented for this study.
2. MPPT Algorithms for WECS
The basic objective behind using the MPPT algorithm is tracking and capturing maximum power from WECS. Different regions of operation for WECS and the region for MPPT are shown in
Figure 4. We can very well understand the concept of MPPT from
Figure 5. The MPP at every wind speed makes up the
curve. There is no generation for all the velocities below the cut-in value as it is the minimum required speed to start generating usable power. The speed at which rated usable power is generated is the rated speed. The maximum power is extracted in region two that lies between the
and
. Several important variables such as the voltage, optimal power, duty cycle have to be estimated that may be challenging as stated in [
23,
32,
36]. For selecting the appropriate MPPT algorithm, among several parameters, efficiency, speed, need of wind speed sensors, implementation complexity is considered. MPPT algorithms find their applications in renewable energy systems such as solar PV, wind energy, and others.
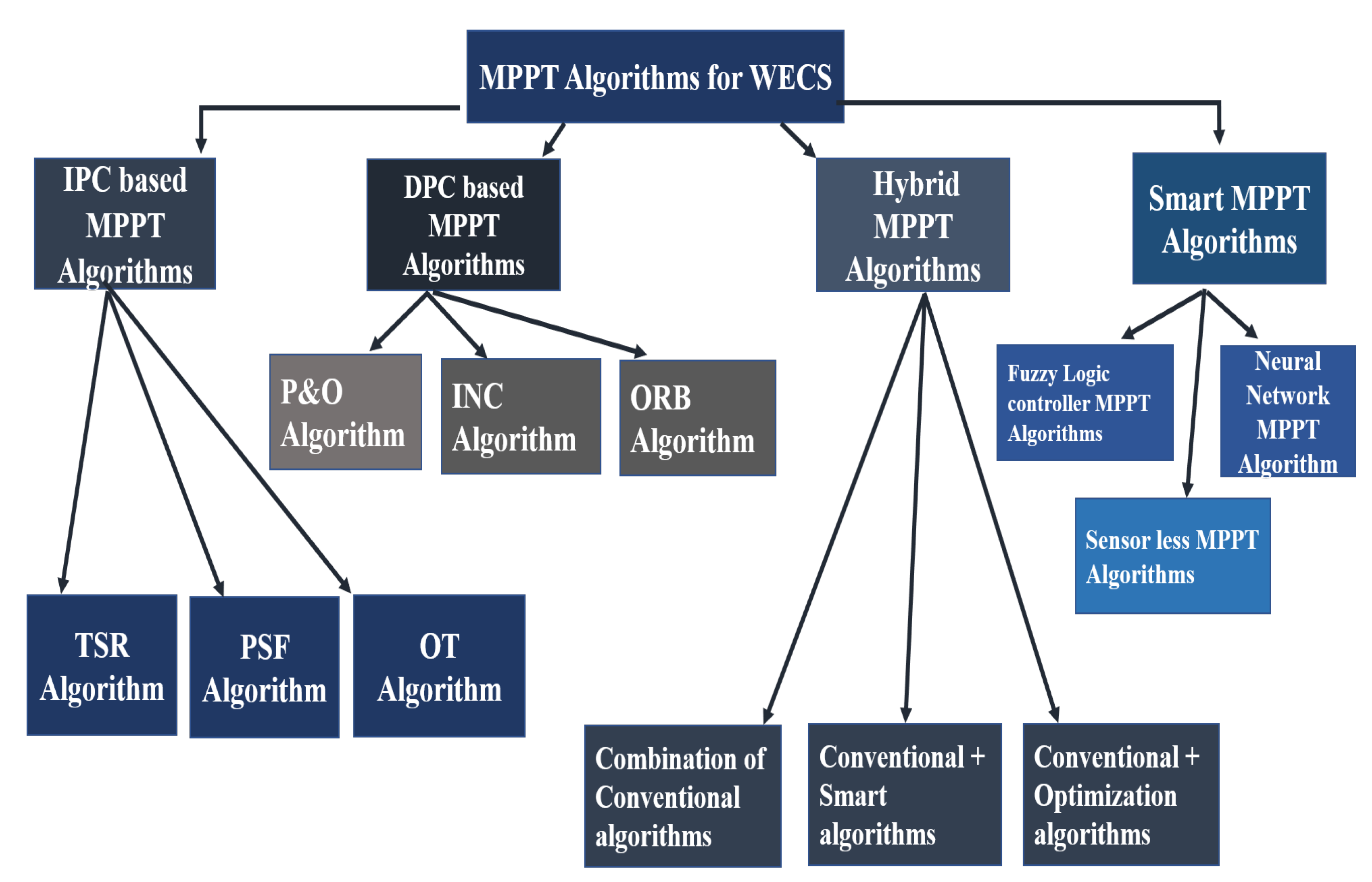
MPPT algorithms designed in the past works use the parameters such as the TSR, relation between the turbine rotational speed and power, and many others mentioned above in the review of the past works. They essentially aid in tracking and extracting maximum power from WECS. In [
38,
39] the classification of the MPPT algorithms is presented. They can be largely classified depending on the use of speed sensors. As depicted in
Figure 6, they are categorized into the main types, as direct power control (DPC) and indirect power control (IPC) [
32,
40] and other advanced methods using neural networks (NN) and Fuzzy logic controller (FLC) [
41,
42]. There are MPPT techniques such as tip speed ratio(TSR), power signal feedback (PSF), and optimal torque(OT) [
43,
44,
45] under the IPC control scheme. In the IPC technique, the power is pre-calculated using the wind speed plots, which maximizes the mechanical power
, while in the DPC scheme, the electrical power (
) is directly examined to operate the WT at the MPP. The DPC control scheme includes the MPPT algorithms such as perturb and observe (P&O) [
46], incremental conductance (INC) [
47], and optimal relation-based (ORB) [
36,
48]. An overview of several MPPT algorithms is presented in this section.
2.1. Conventional IPC Based MPPT Algorithms for WECS
In this section, the IPC-based conventional MPPT algorithms for WECS are discussed.
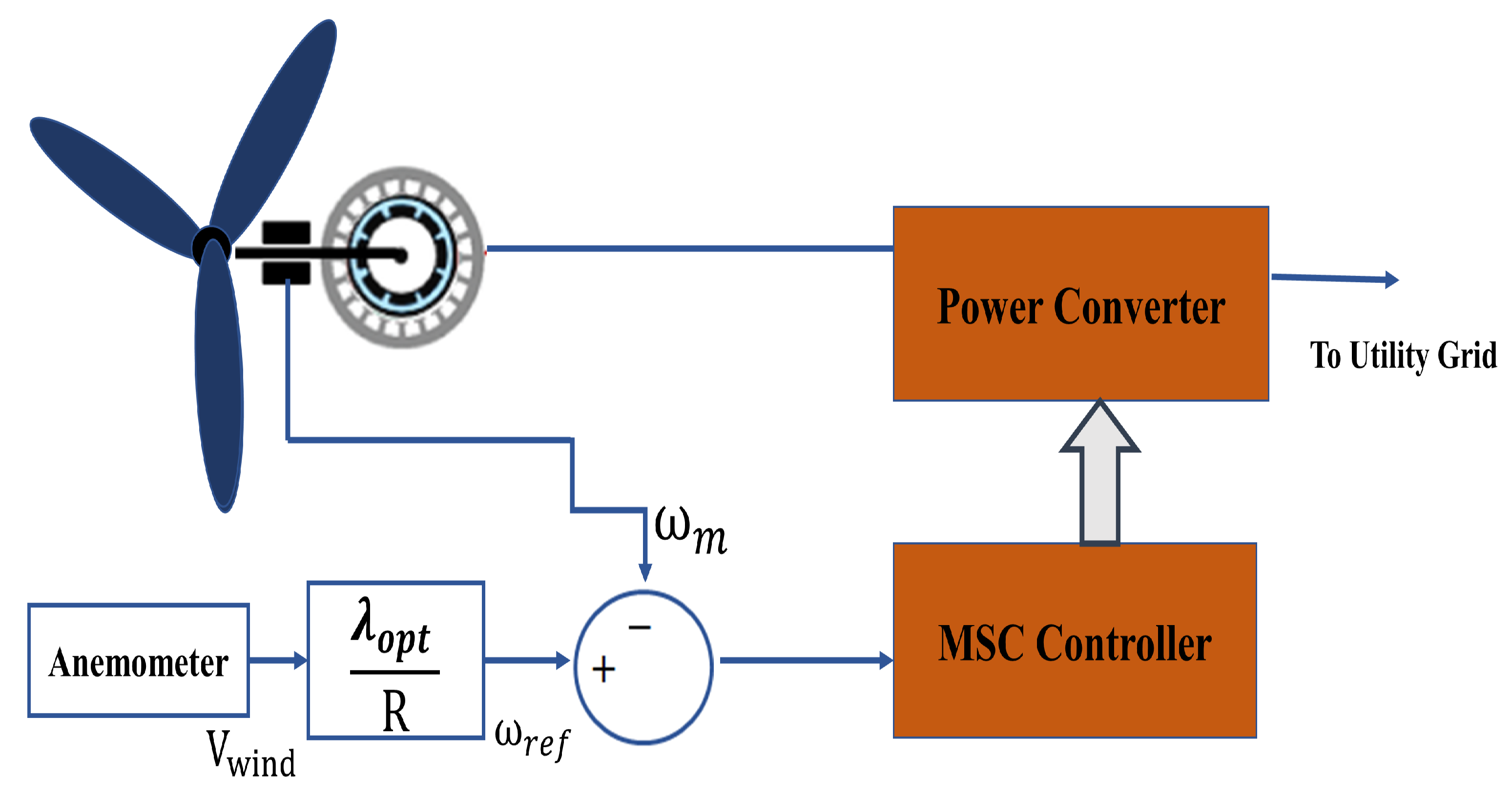
2.1.1. TSR MPPT Algorithm
In this method, optimum TSR is obtained for the turbine to extract maximum power [
49].
Figure 7 depicts this scheme. By estimating the speed of the rotor and the wind, an optimal reference speed of the rotor (
) is generated. By considering the system parameters, the optimal power extraction is estimated in the TSR method [
50,
51,
52,
53]. The TSR MPPT algorithm has advantages such as rapid response and simplicity; hence, it is employed for regulation of the optimal rotor speed under changing environmental conditions [
54,
55,
56]. Based on the acquired speed of the wind, there are two approaches. The first approach is based on the mechanical sensor employed and the second one on the estimation of the speed of wind [
23]. In the first approach, the TSR algorithm based on the mechanical sensors makes use of multiple anemometers which surround the WT swept area with an accuracy of −10% for measuring the speed of the wind [
57]. The major drawback here is higher installation and initial cost and increased maintenance cost with lower efficiency and reduced reliability. In the second approach, wind speed estimation-based TSR algorithms were employed by researchers to overcome the drawbacks introduced due to the use of anemometers [
58]. Wind speed estimation (WSE) algorithms provide higher accuracy in the calculated wind speed, although the accuracy decides the effectiveness in the tracking of energy as well as the harvesting. The efficient WSE algorithms based on the polynomial methods provide high accuracy, speed, and simplicity. These WSE algorithms are employed considering either the mathematical modeling of the WECS or considering the adaptive intelligent controllers [
57,
59,
60,
61].
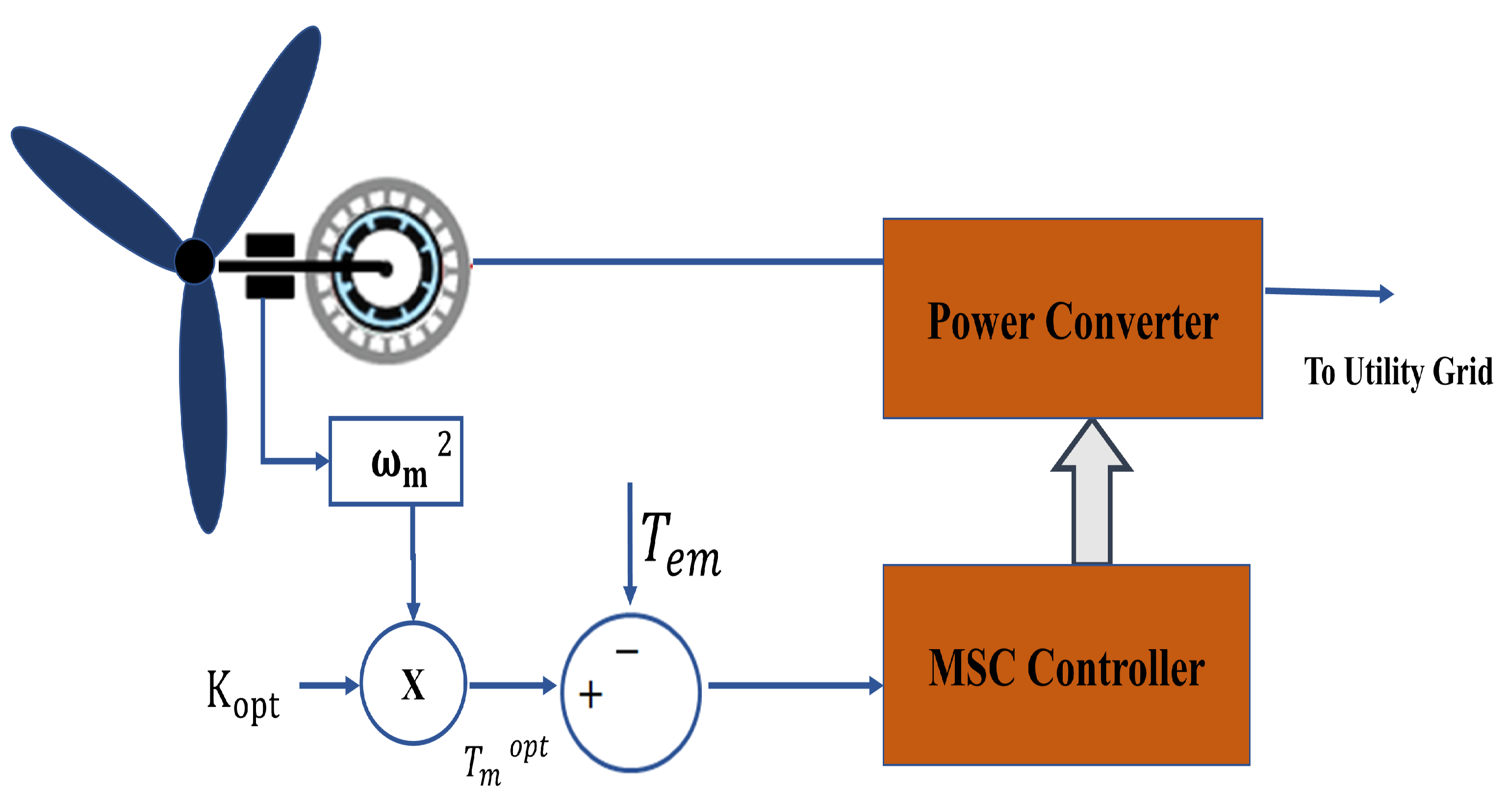
2.1.2. OT MPPT Algorithm
The approach for the OT MPPT algorithm involves the regulation of generator torque by using the optimal torque curve for multiple wind speeds [
52,
55]. The scheme for this algorithm is as shown in
Figure 8. The efficiency of the WT is dependant and defined by the optimum value of the constants of the turbine, which emphasizes the need for experimental validation [
62,
63,
64]. The benefits of this technique are greater efficiency, simplicity, and high tracking speed, but it suffers from the issues of dependency on the climatic conditions and the requirement of knowledge of the characteristics of the WT [
65,
66].
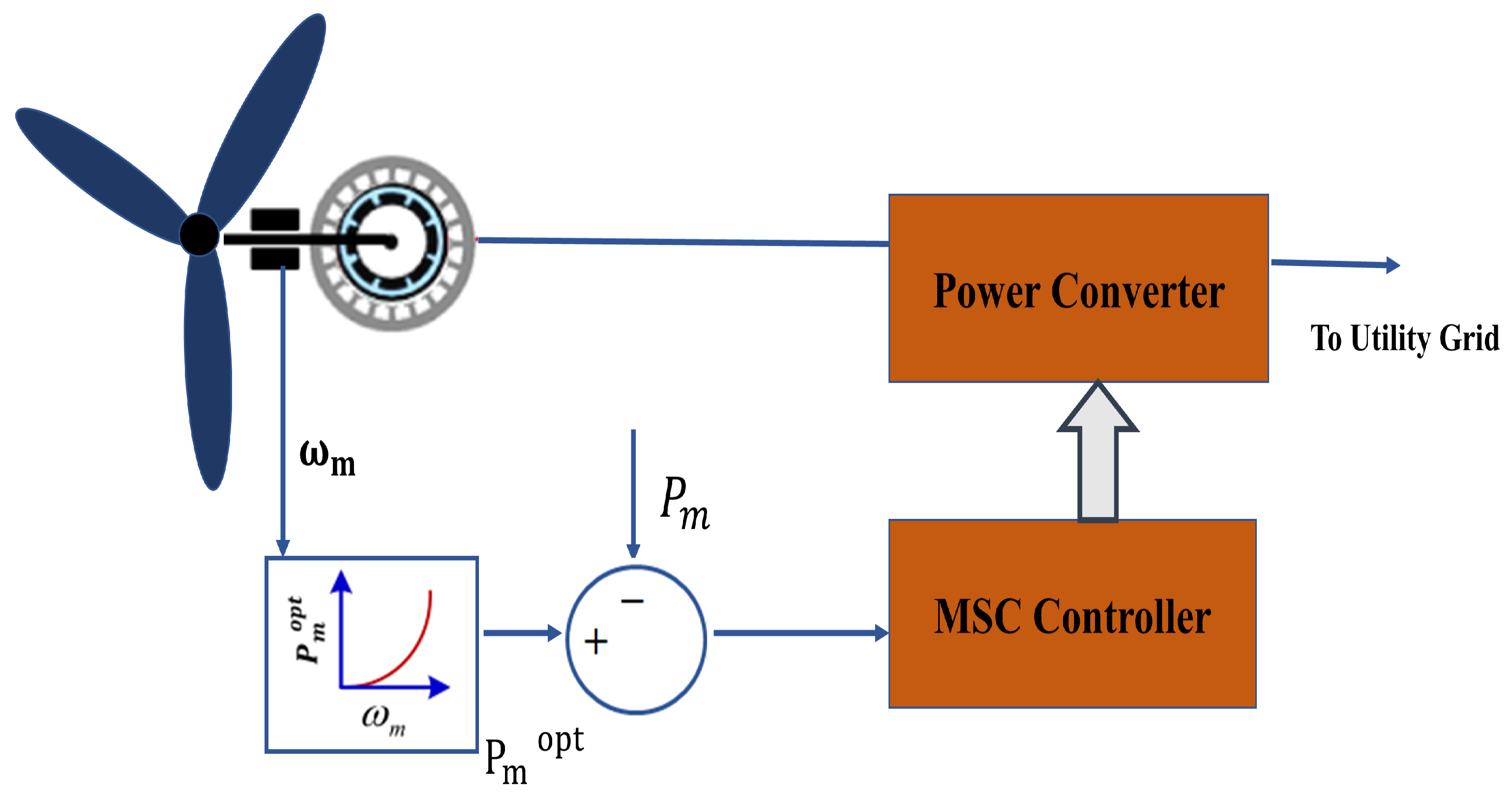
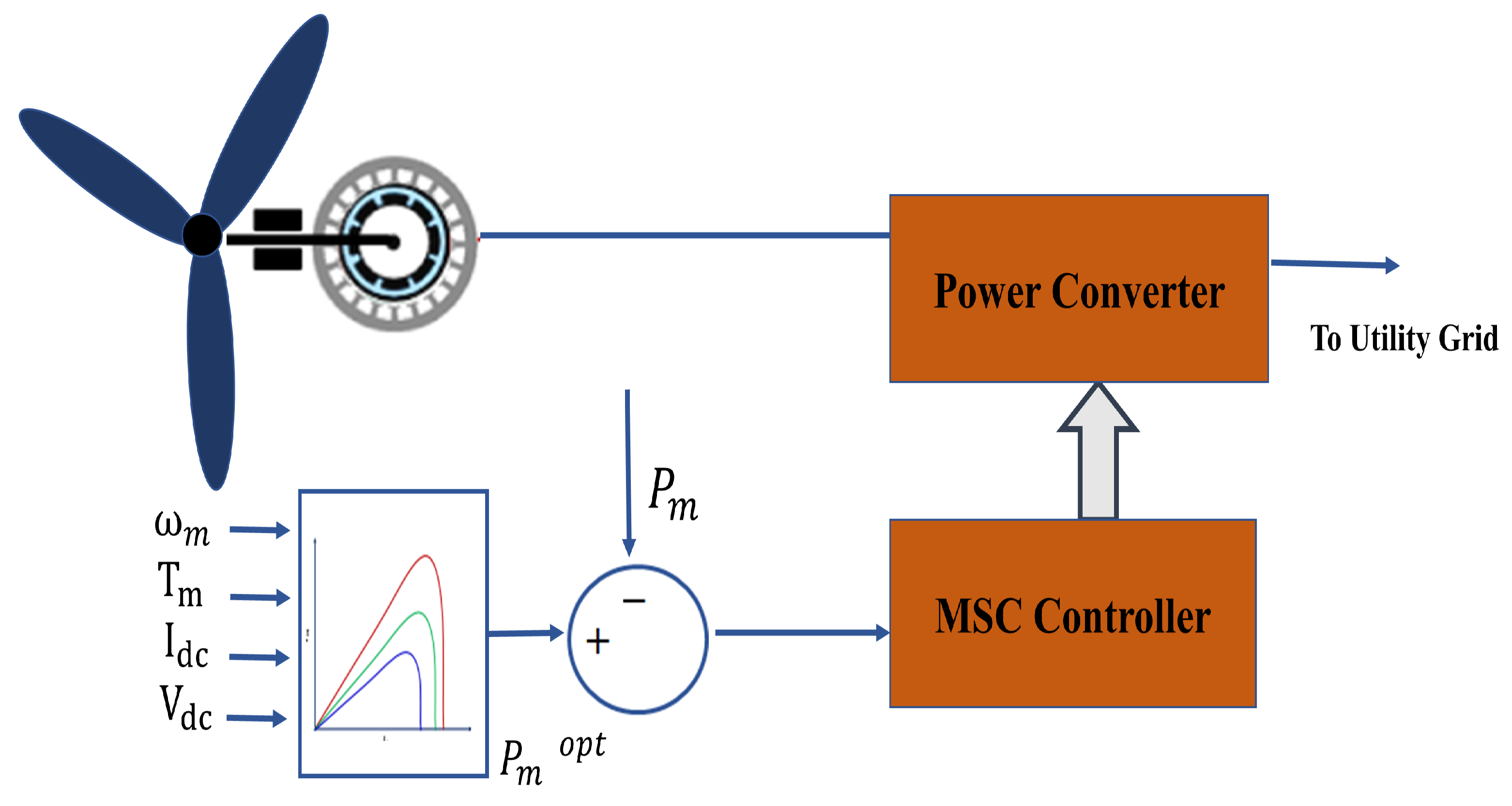
2.1.3. PSF MPPT Algorithm
In this method lookup tables for the optimal power
are generated by experimental setup or by simulations for every WT [
32]. The sensorless version of this algorithm measures the value of
as the relation between the change occurring in the DC link and the present wind speed. The value of
is measured based on the optimal power curve and estimated electrical power [
67]. The drawbacks of PSF and OT are almost similar while tracking the MPP for WT with high inertia at the lower speeds of the wind. Both the algorithms are low-cost and robust.
Figure 9 shows the scheme for the PSF algorithm. A comparison of the IPC-based techniques is presented in
Table 1.
Table 2 gives a summary of references for the IPC based algorithms
2.2. Conventional DPC Based MPPT Algorithms for WECS
Conventional DPC-based MPPT algorithms for WECS are discussed in this section. The DPC-based algorithms majorly include INC, P&O and ORB MPPT algorithms.
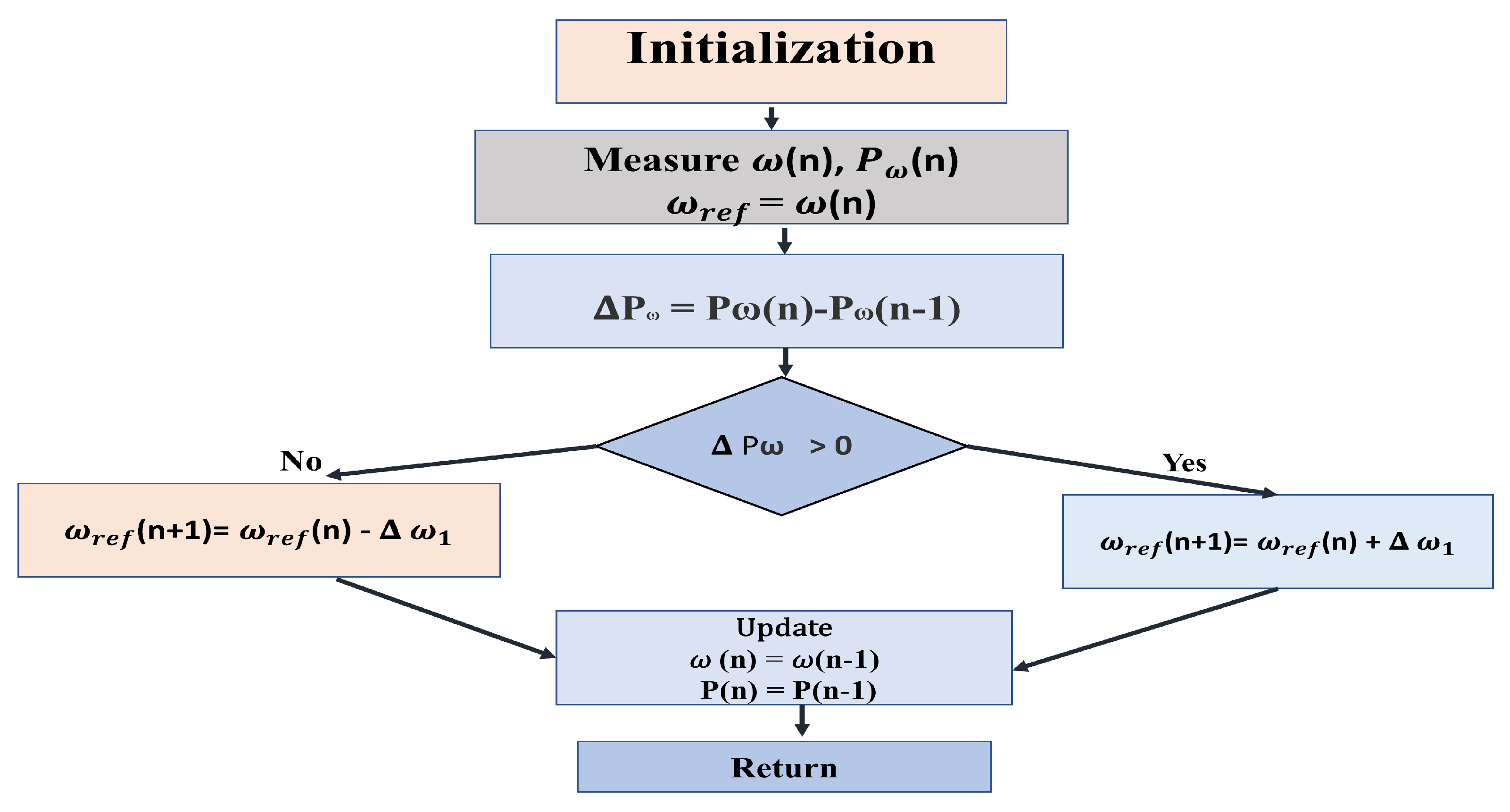
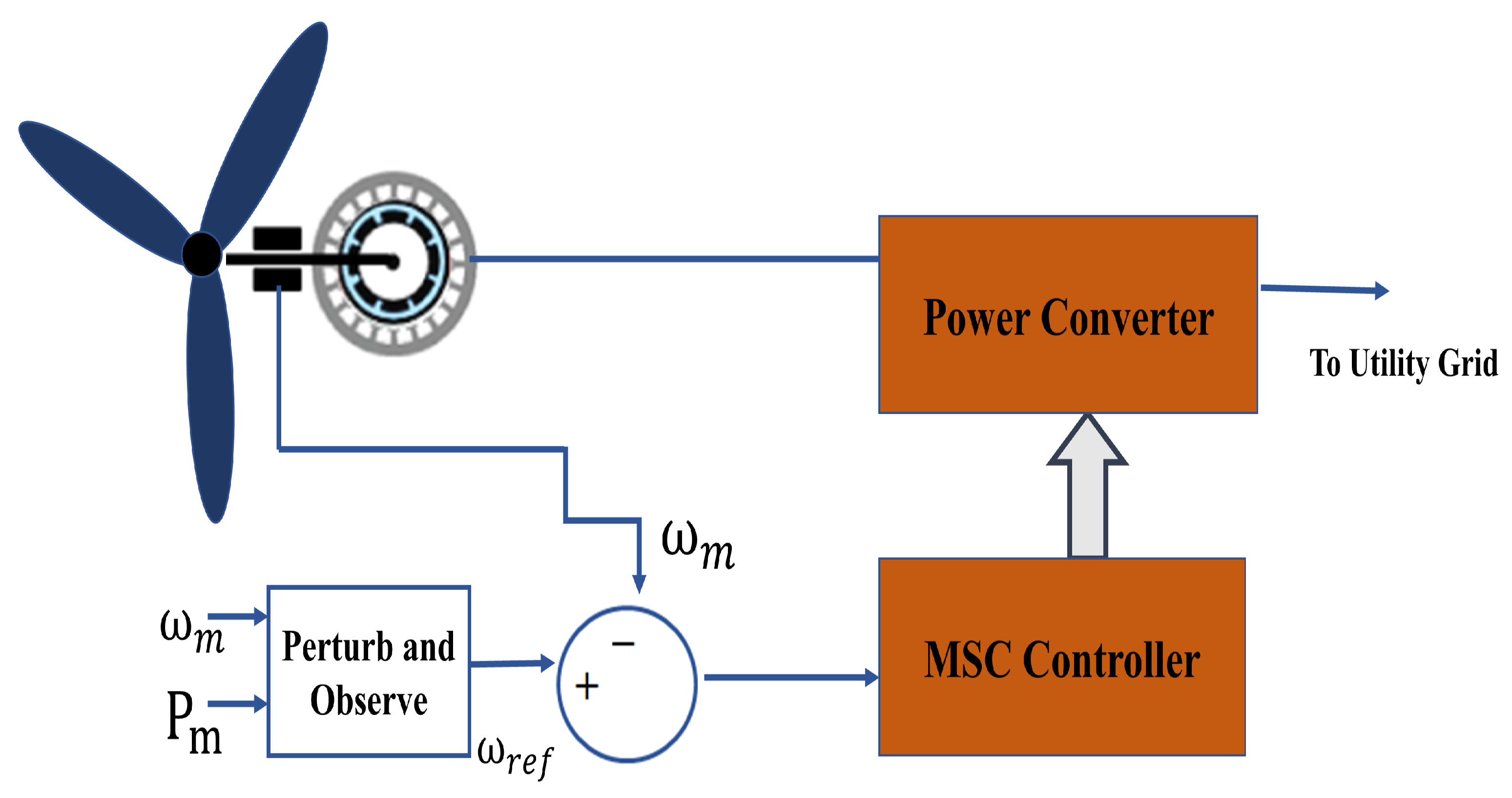
2.2.1. Conventional P&O MPPT Algorithm
The approach for the P&O algorithm involves the location of the MPP by employing the strategy of mathematical optimization. This method involves perturbation of the control variables such as either the dc-link voltage or the speed of the rotor, and their effect on the performance of WECS is observed. In the conventional P&O (CPO) algorithm, the power obtained is amended along with the speed of the generator to obtain a zero slope for the P-
curve. The most important features and advantages of this algorithm are that it does not need the sensors such as an anemometer, and also, there is no requirement of the knowledge of the WT parameters [
36,
69]. In the CPO algorithm, if the operating point lies towards the left of the MPP, then the controller moves it towards the right, and if it is on the left, then vice versa [
40,
70]. The optimal operating point is searched, and the maximum power is tracked in this method [
71,
72].
Figure 10 shows the flowchart for this scheme, and
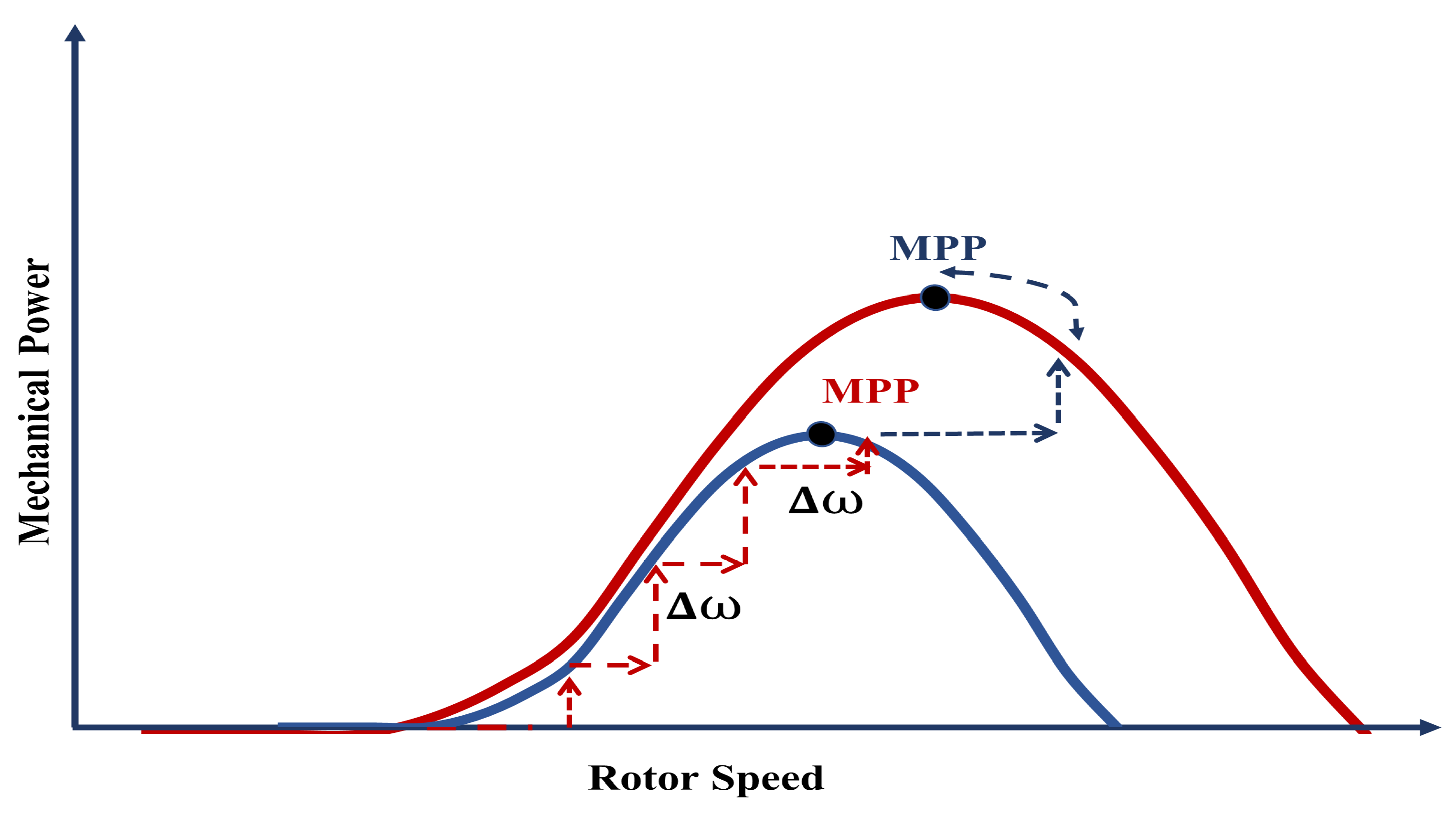
Figure 11 depicts the working concept of this algorithm. Due to its simplicity and ease of use, this technique is very popular. The important drawback of this algorithm is that it is challenging to decide upon an appropriate step size for perturbation since it affects the WT performance. Larger step sizes result in oscillation near the MPP. On the other hand, smaller step sizes will result in higher convergence time and slower response. Another issue is that of losing track of the MPP under varying speeds of the wind.
Figure 12 depicts the issue of tracking the MPP under varying speeds of the wind.
Figure 13 depicts this scheme.
2.2.2. Conventional INC MPPT Algorithm
This method involves observation of the rectifier output power, which is used for tracking the MPP and deciding the perturbation direction. The need for sensors and the knowledge of the WT parameters is eliminated by using the INC algorithm, which results in the increased reliability and efficiency [
24,
73]. The changes in the dc-link voltage and current are used for determining the output power [
74]. The control scheme is shown in
Figure 14.
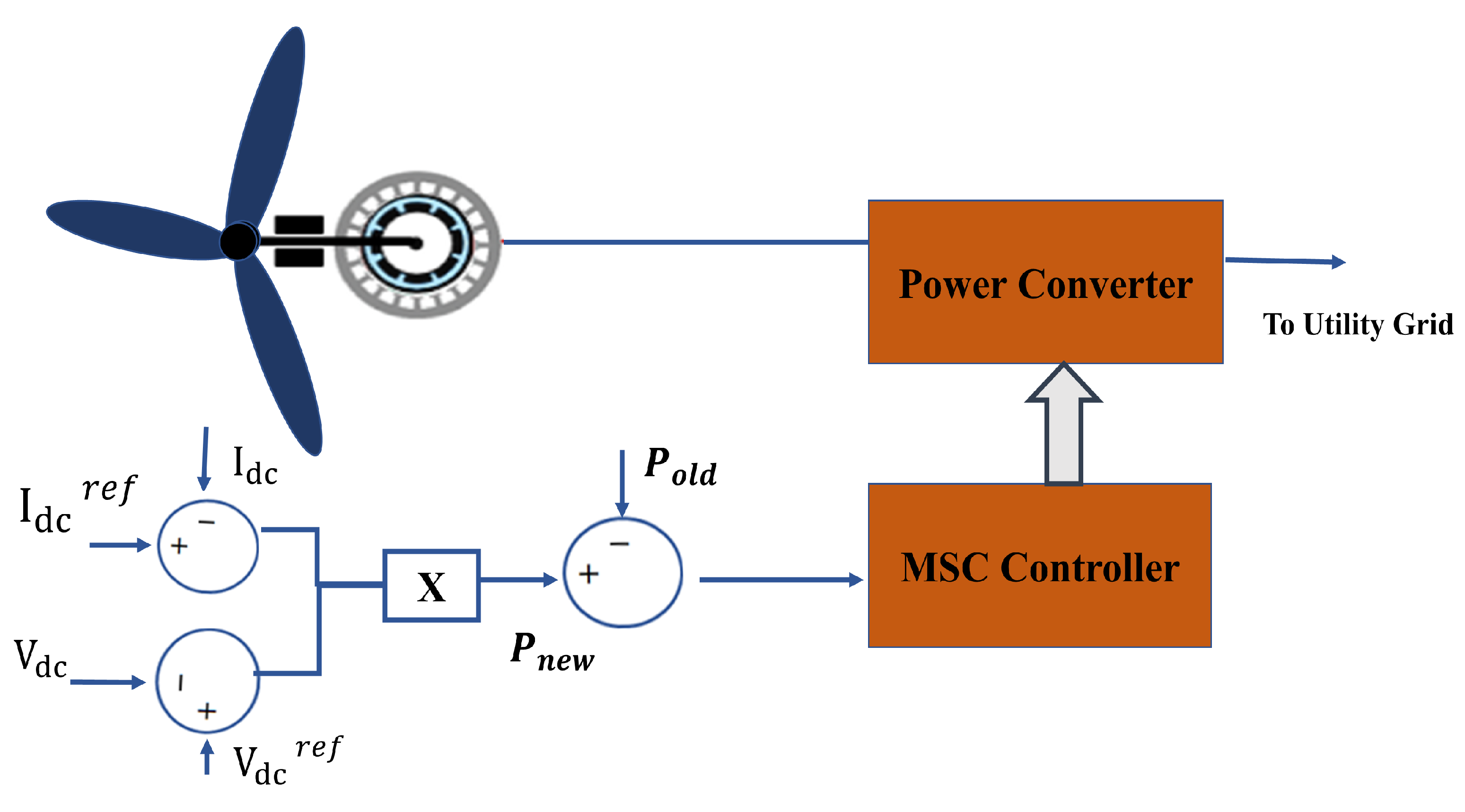
2.2.3. Conventional ORB MPPT Algorithm
This MPPT algorithm majorly relies on the predetermined relationship between the parameters of the WT [
68,
74,
75,
76,
77]. The simplicity of this method is because only the values of DC power and voltage along with current serve as the inputs for this algorithm [
12]. A few examples are optimum relation among the parameters such as power and speed of the rotor in [
78,
79], electromagnetic torque and power in [
80,
81], rectified dc-link voltage versus power [
41], and between dc-link current and voltage in [
82]. When compared to the other algorithms, this method is found to provide faster response, and the operation is quite simple without the need for anemometers and hence is a preferred choice for commercial WECS [
18,
83,
84]. However, the high memory requirement for the pre-obtained relation curves is a major disadvantage of this method [
69,
85].
Figure 15 portrays the control scheme of this algorithm. In
Table 3, a comparison based on different characteristics of MPPT algorithms is made for DPC-based algorithms. A summary of references for the DPC based algorithms is given in
Table 4.
2.3. Modified Conventional MPPT Algorithms for WECS
The INC and CPO algorithms do not require sensors, and hence these are lower in cost, simple to implement, and the memory requirement for them is small. With these techniques, the calculation of the optimal power is conducted without any previous knowledge of the parameters and characteristics of the system. Besides these advantages, the CPO algorithm majorly suffers from the drawback of a trade-off between convergence and efficiency. As discussed above, the modified P&O algorithm (MPO) helps in eliminating these drawbacks. In addition, the modified INC algorithm is used to obtain a better system precision, performance, and convergence speed. Many variations have been brought about in the CPO algorithm due to its simplicity and ease of use. These variations and modifications have helped in overcoming the drawbacks of the CPO algorithms. MPO and the modified INC, OT, PSF algorithms are discussed in the section below.
2.3.1. Modified Optimum Torque (OT) MPPT Algorithm
The torque
T in conventional OT MPPT algorithm is given by Equation (
4).
A modification in this method is presented in [
33,
81,
86,
87,
88] in which the net torque is used to represent the acceleration or deceleration, which is given by Equation (
5) where G is the gain for adjusting the net torque,
is the rotor speed and the mechanical torque
that the WT captures.
The main objective in bringing about the modification is for faster tracking targeted at the large inertia of the turbine that creates hindrance in following the torque command when the wind speed is rapidly changing. This algorithm helps in better and faster tracking of the MPP.
2.3.2. Modified PSF MPPT Algorithm
The motivation behind using this modified form of PSF algorithm is to avoid the stalling of the generator, this is achieved by offsetting the power measured by a constant value [
41,
89]. The stator frequency derivative is feedback to increase the system sensitivity against the rapid wind speed changes. The major issue in this modified method is that unwanted overshoots are observed in the control variable, and achieving MPP becomes more cumbersome and difficult.
2.3.3. Modified INC MPPT Algorithm
A modification in the conventional INC algorithm, an adaptive INC algorithm, is presented in [
90,
91,
92,
93,
94]. By changing the perturbation step size of the dc voltage, an enhancement is obtained in the dynamic performance of WECS as well as the speed of convergence, but the maximum amplitude of the step sizes is dependent on the parameters of the generator, and it is limited.
2.3.4. Modified P&O MPPT Algorithms
The CPO MPPT algorithm is very simple, and low cost is a preferred choice for tracking the MPP. However, due to several drawbacks, as discussed in the earlier section, the replacement of the CPO is gaining popularity among researchers. The modifications in CPO involve changes in the strategy of tracking and hence called modified P&O algorithms(MPO) which made use of the variable and adaptive step size [
76,
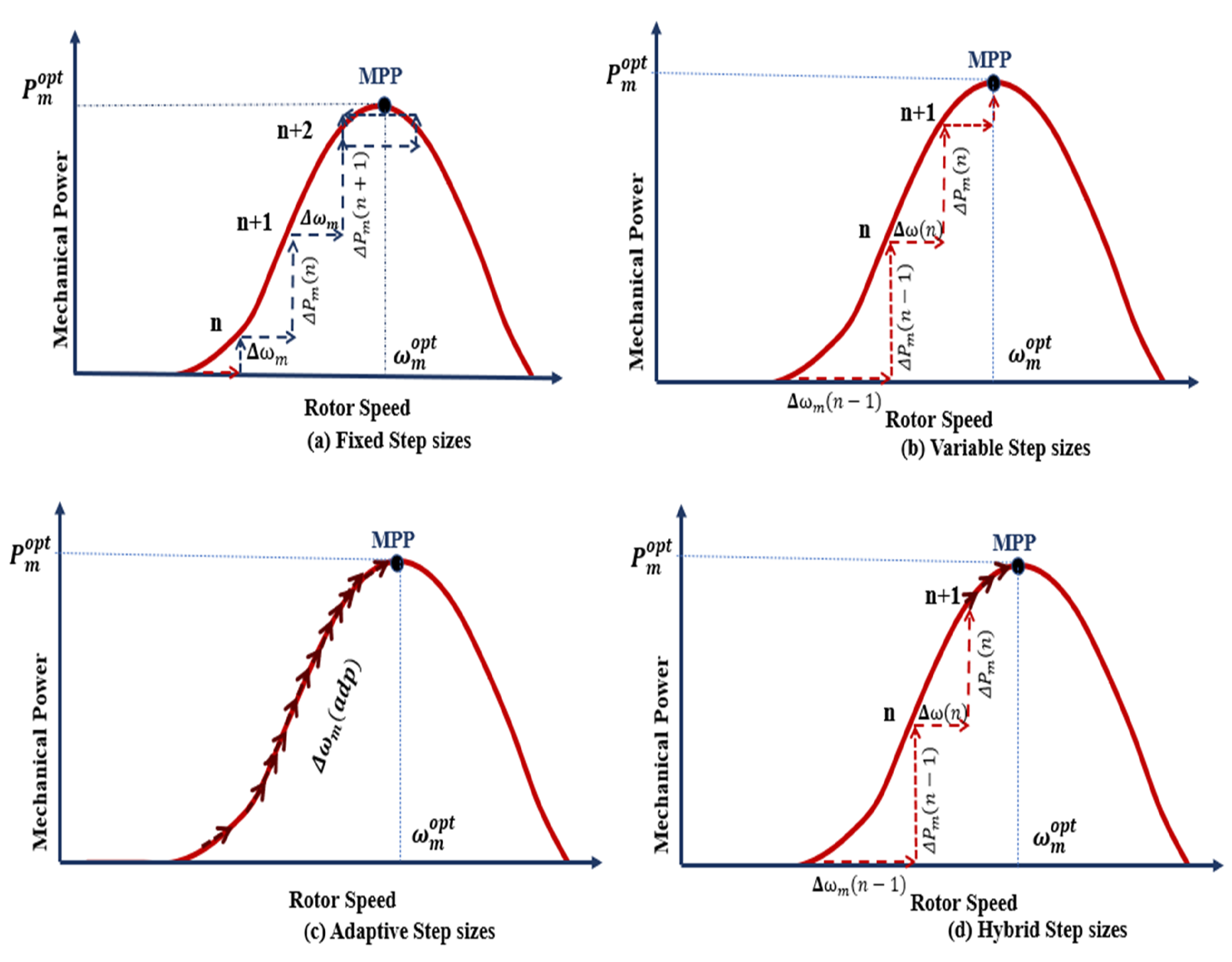
95]. Depending on the type of step size used for perturbation of the control variables, the classification of step sizes is as stated below,
Fixed step sizes: A fixed amplitude of the step size is employed to perturb the control variable while carrying out the tracking procedure.
Variable step sizes: Step sizes of varying amplitudes are employed, with a unique step size for each region.
Adaptive step sizes: The step size employed for perturbation is finalized depending on the variation in the general objective function at each operating point.
Hybrid step sizes: A combination of two different generated step sizes while MPP tracking is employed.
Figure 16a–d portrays the P&O algorithm-based categories of step sizes that are generated while carrying out the tracking process.
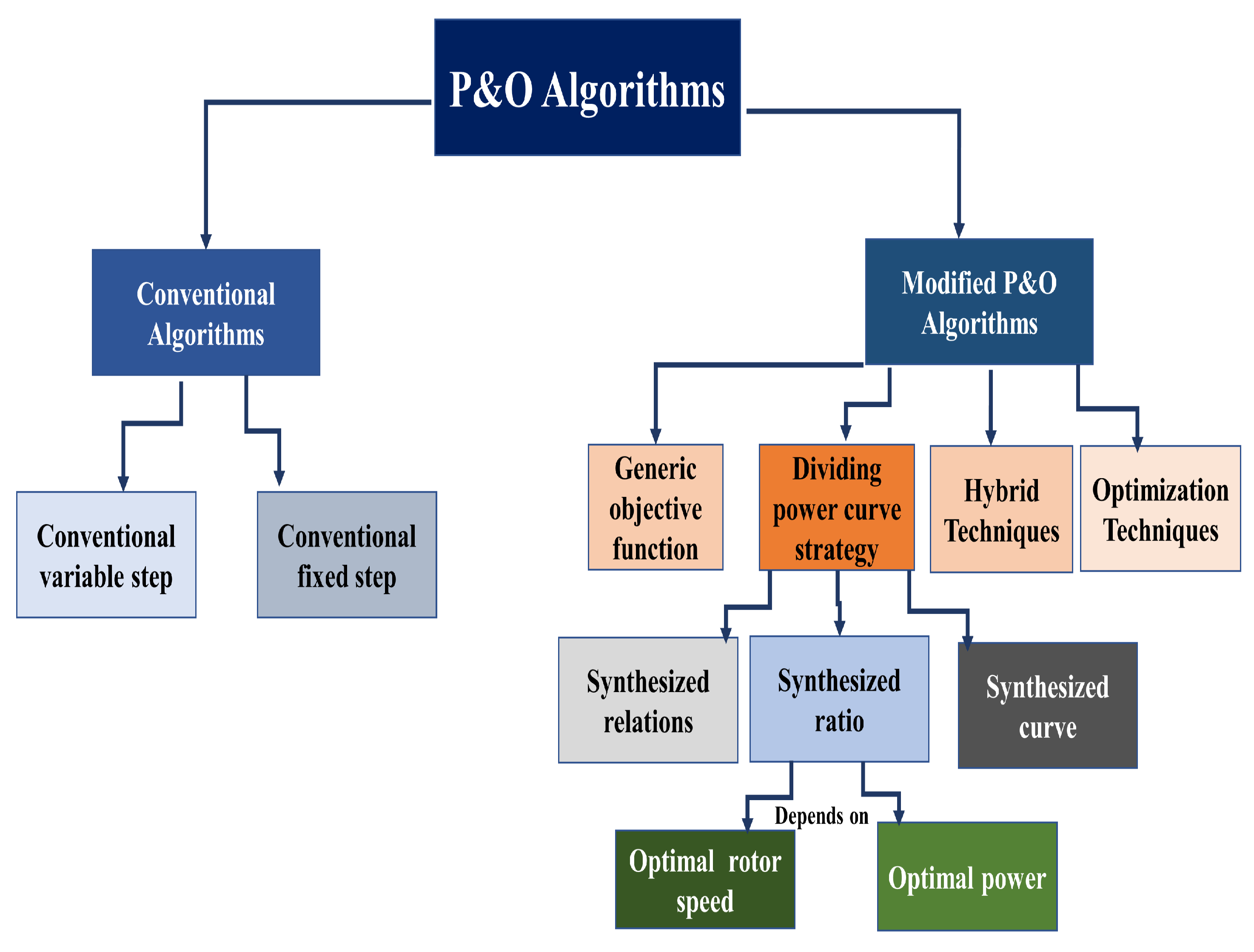
Table 5 summarizes the P&O method-based generated step sizes, and
Table 6 summarizes the references for modified MPPT algorithms. Finally,
Figure 17 shows the classification of P&O algorithms for WECS.
The MPO algorithms can also be grouped based on the generic objective function, optimization techniques, power curve division, and hybrid techniques. The approach of power curve division facilitates managing the step size in each of the regions individually. The way the MPO will work with adaptive, hybrid, or variable step sizes is influenced by the number of regions of operation and the way the power curve is divided. The synthesized curve, relations, or ratios can be used to decide the approach for power curve division. As discussed in [
96,
97,
98], the power speed curve can be divided into multiple regions, and the synthesized curve is implemented, and anemometers are employed to produce four operating regions, with each of them having a unique step size. The issue with this method is that owing to fewer operating regions, there is a noticeable transient overshoot. Another issue is the need for sensors. The complexity involved in the synthesized curve is reduced by using the synthesized ratio that involves measuring either the changes in the output power, speed of the rotor, or both. In [
23,
99], the estimation of optimal power is conducted for finding the synthesized ratio. In the synthesized relations strategy, general relations are stated by the observation of the control variables. The related control variables are current, voltage, output power, or the perturbation step size. They are used for splitting the power curve into multiple regions of operation. The rotor speed is regulated with the help of the alterations in the power within the specified limits in [
100]. In [
101,
102], the definite conditions are used as a replacement for the lookup table. Intermediate variables with dual control mode are presented in [
103,
104]. The strategy of dividing the power curve suffers from limitations such as the complexity of the system and the requirement of accurate tuning of several parameters. Hence, other methods employing the generic objective function are used for enhancing the CPO algorithm performance.
Many researchers have used optimization techniques in the domain of PV applications. The domain of WECS also has made use of several optimization techniques. The process of CPO algorithm optimization can be carried out by using the Wilcoxon radial basis function network as discussed in [
105,
106]. The strategy of optimization of the line of search to achieve optimal conditions for operation is presented in [
107]. As presented in [
108], proportional integral derivative (PID) controllers are optimized for employing with the P&O algorithms.
2.4. Smart MPPT Algorithms
Intelligent controllers such as neural networks (NN) and fuzzy logic controller (FLC), and several soft computing-based algorithms are available in the literature [
117,
118]. Several soft computing algorithms have proven to be an attractive option for WECS based applications since no mathematical parameters of the WECS are needed [
55,
119] although the accuracy of the optimal response of the control variables is not very precise. Numerous adaptive algorithms are available in the literature which does not make use of mechanical sensors and are used for treating the uncertainty of the system during optimal conditions as presented in [
120,
121,
122]. A brief overview of the FLC, NN, sensorless, and multi-variable P&O MPPT algorithms is presented in this section. There are MPPT algorithms based on optimization algorithms that are proposed in the literature, such as Cuckoo Search (CS), Genetic Algorithm, Particle Swarm Optimization (PSO), Teaching Learning Based Optimization (TLBO), Grey Wolf Optimization, are employed with the conventional ones to eliminate the shortcomings of the conventional MPPT algorithms [
28,
96,
123,
124,
125,
126]. In a solar and wind hybrid system, the ant colony optimization(ACO) provides a faster convergence as compared to the PSO algorithm [
127]. A comparison of the smart MPPT algorithms for WECS is presented in
Table 7.
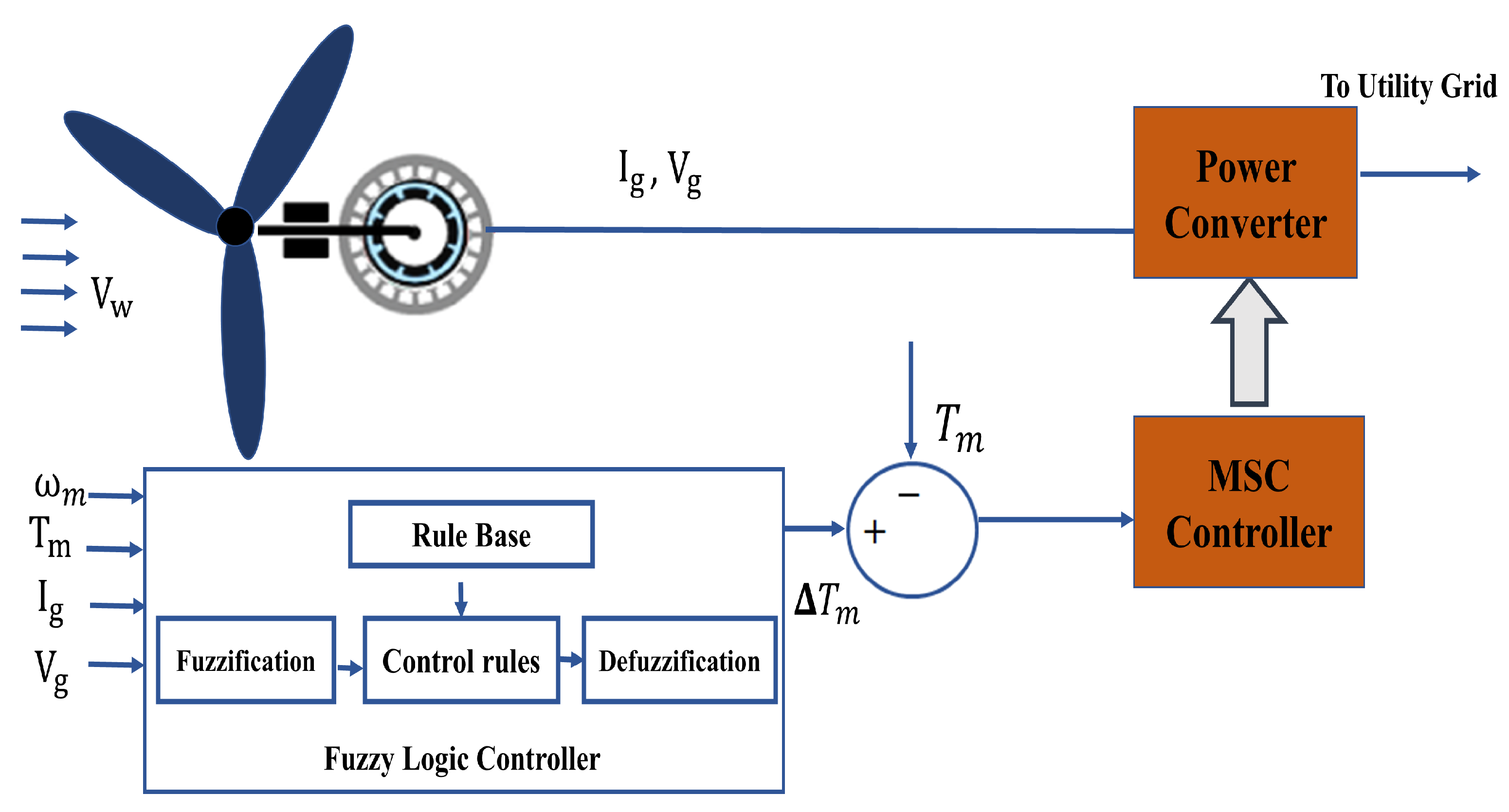
2.4.1. Fuzzy Logic Controller Based MPPT Algorithm
The issue of oscillations around the MPP is addressed by employing FLCs for the MPPT algorithm. This method is characterized by the fact that variables of the controller can be rapidly changed, corresponding to the changes that occur in the dynamics of the system. Therefore, there is no need for the mathematical modeling of WECS. The overall system performance of this type of method is good even under varying climatic conditions. Although it is possible only when proper rules are designed by the user with adequate knowledge of the system for selection of the appropriate rule base, membership functions, and high requirement of memory is also a major issue [
32,
130,
131,
132,
133]. Different FLC based MPPT algorithms are presented in [
107,
108,
117,
118,
119,
134].
Figure 18 depicts the FLC scheme for WECS.
2.4.2. Neural Network Based MPPT Algorithm
There are three layers in the neural network architecture, that are the input, hidden, and output layers. The user decides how many nodes he will use and can vary from user to user [
135,
136,
137]. Several variables are used as the input variables such as the terminal voltage, wind speed, output torque, etc. The output provided serves as a reference variable such as the reference power or the speed of the rotor to drive the power electronic circuitry. The weights given to the layers decide how the operating point will coincide with the peak point. The training is given to the system for the particular input-output pattern [
138]. The training results in the reduction of the response time which facilitates the quick achievement of the steady state even under varying wind velocities. This method provides an improvement in the trade-off between the response time and the output power.
2.4.3. Smart Sensorless MPPT Algorithms
The sensorless approach helps in the elimination of the mechanical sensors and the need for prior knowledge of the characteristics of the WT [
113,
139,
140,
141]. Researchers have proposed sensorless MPPT algorithms for accurate measurement of wind speed as discussed in [
142,
143,
144]. FLC-based and NN-based MPPT algorithms in which the prior knowledge of the WT is not required are discussed in [
110,
111,
112].
2.4.4. Multi-Variable Perturb and Observe MPPT Algorithms
This algorithm aims at producing maximum power by employing a minimum number of sensors control units in a wind farm. MVPO algorithm yields higher generated power with lesser components for a wind farm [
76,
145,
146]. The adoption of the MPO algorithm has facilitated optimization of currents of all the generators by perturbation of current of the individual generators until there is increased power in the wind farm. This procedure is iteratively performed to cover every generator in the wind farm [
147].
2.5. Hybrid MPPT Algorithms
As described in the previous sections, each of the conventional algorithms has its advantages and disadvantages. Two or more algorithms are merged or clubbed together to form a hybrid algorithm, to make the best use of the advantages of two different algorithms and get rid of their disadvantages, and thereby enhance the performance of the WECS [
17,
119,
148]. Several combinations of the conventional algorithms are available in the literature, and some are described below in this section.
Table 8 summarizes references for the smart and hybrid MPPT algorithms, and
Table 9 presents a comparison of the hybrid MPPT algorithms.
Table 10 gives a list of symbols.
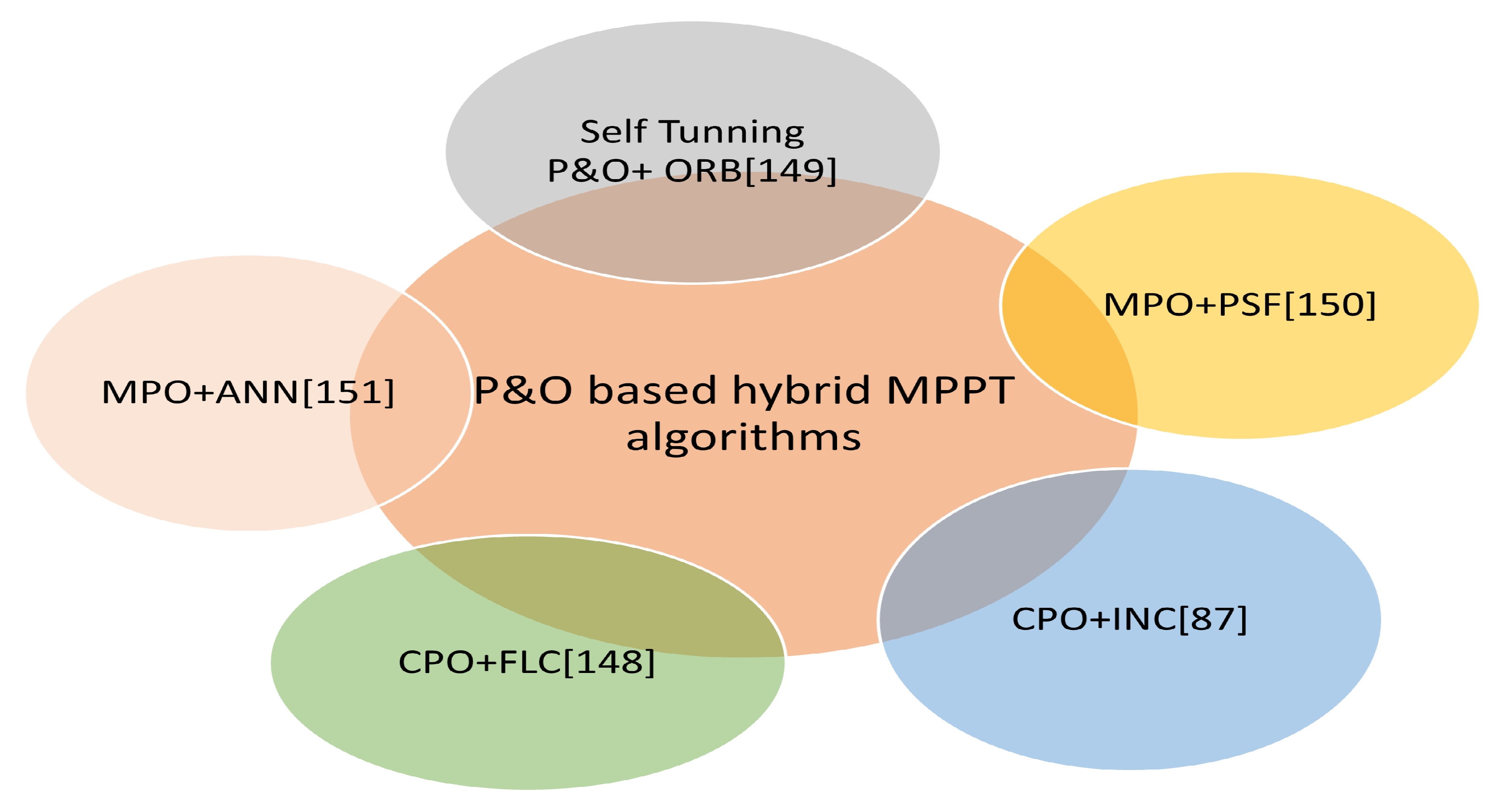
2.5.1. P&O Based Hybrid MPPT Algorithms
The simplicity and ease of use of CPO have been exploited for its use in hybrid algorithms by many researchers. The problems that occur in the CPO MPPT algorithm of oscillations around the MPP, the trade-off between speed and efficiency, and change in the wrong direction under a rapid change in the wind speed are overcome by combining it with other algorithms. OTC is combined with the HCS or conventional P&O. This combination helps in overcoming two issues. First is the issue of the trade-off between speed and efficiency, and the second is the wrong direction change under high-speed fluctuations of the wind [
35]. Fuzzy logic control (FLC) is clubbed together with the CPO MPPT algorithm [
149]. Combining these two improves MPP tracking. Self-tuning P&O algorithm merged with the ORB algorithm is presented in [
150] which works in two modes and provides better MPP tracking. Other algorithms that are merged with CPO are OT, INC, TSR, and PSF for overcoming the related shortcomings of CPO, specifically the issue of incorrect directionality due to fluctuations in the speed of the wind, are presented in [
40,
69,
90,
154,
155]. Modified P&O merged with PSF is presented in [
151] where MPP is first tracked using MPO and employs PSF after that. MPPT based on ANN employing the P&O rules is discussed in [
152], and the important benefits of using this technique are that it eliminates the need for the information about the values of
and
and also provides better accuracy.
Figure 19 portrays different P&O-based hybrid MPPT algorithms.
2.5.2. Optimization Algorithms Based Hybrid MPPT Algorithms
The combination of conventional MPPT algorithms and optimization algorithms are proposed, such as particle swarm optimization (PSO) employed with the conventional ones to eliminate the shortcomings of the conventional MPPT algorithms. The combination of ORB and particle swarm optimization (PSO) is used in [
153]. In the first phase, PSO is employed for searching the optimum coefficient, and in the second phase, ORB MPPT is used. This technique increases efficiency, and no sensors and knowledge of the parameters are required for this hybrid method. MPPT algorithm based on the combination of PSF, soft stalling, and PSO controllers helps improve the efficiency over the entire speed range of the WT [
156].
3. Discussion
The main objective behind the use of the MPPT algorithm is tracking and capturing the maximum power from the WECS. It is a tough task to select an appropriate algorithm. The comparative study reveals that the conventional IPC-based algorithms are faster and simpler to implement, but they capture mechanical power rather than electrical power. The DPC-based conventional algorithms do not require sensors, are low cost and are easy to implement. However, these algorithms do not provide satisfactory performance when the fluctuations are high in the speed of the wind. The CPO algorithm is immensely popular as it has several advantages of being simple, low cost, and easy to implement. However, it suffers from oscillations around the MPP and poor performance at higher fluctuating wind speeds.
The use of MPO has eliminated the drawbacks of this method. Several modifications are evident in the literature based on the step size employed for MPO algorithms. It is challenging for the methods with fixed step size to decide upon the step size for perturbation as a significant oscillation of the MPP is observed. By employing the variable step sizes, the oscillations around the MPP and higher tracking time issues can be very well addressed, although the step size procurement strategy results in higher complexity. In the case of hybrid step sizes, step sizes of different types are generated. However, their operation order and their activation need accurate designing and add to the complexity. It is evident from the literature that the demerits of an individual algorithm can be eliminated by either using the modified form or by employing hybrid techniques. The smart algorithms are efficient but suffer from issues such as high complexity, higher cost and may require speed sensors. The hybrid algorithms are promising as they are highly efficient, although they may need sensors depending on the combinations employed. The power coefficient is dependent on the air density. There can be a considerable variation in the air density over various seasons and different climatic conditions. The value considered for the air density is fixed while training the system, and as a result, optimum tracking of the maximum power in all the seasons and different environmental conditions may not be achieved. Some smart and hybrid MPPT algorithms are not generic and require sensors for wind velocity measurement while training. These are the issues that still need to be addressed.
5. Conclusions
MPPT algorithms have proven to be a key factor that aid in capturing and extracting maximum power from WECS. A large variety of algorithms are available in the literature. There is a need to devise a technique that can be very useful for the designers in making an appropriate choice of algorithm among the several available, for a given setup and thereby enhance the system performance to maximize the output produced.
In this paper, the MPPT algorithms of the past and present for WECS have been reviewed and compared. A comparison of the conventional algorithms based on IPC and DPC is conducted, followed by the hybrid and the smart algorithms. From the comparative study, the hybrid algorithms are found to be highly efficient. The hybrid MPPT algorithms can bring into use the advantages of the conventional methods and eliminate their drawbacks. The MPO algorithm has evolved in the recent years. The trend of preferring the P&O technique to enhance the extraction of power from WECS is evident from the literature due to its different features. Several modifications are evident in the literature based on the step size employed for MPO algorithms. Depending on the step size produced and the tracking approach used, the MPO algorithms are classified. The approach of generated step size includes fixed, adaptive, variable, and hybrid. The classification includes the main groups based on hybrid methods, optimization techniques, objective function, and power curve division. It is challenging for the methods with fixed step size to decide upon the step size for perturbation as a significant oscillation of the MPP is observed. By employing the variable step sizes, the oscillations around the MPP and higher tracking time issues can be very well addressed, although the step size procurement strategy results in higher complexity. In the case of hybrid step sizes, step sizes of different types are generated. However, their operation order and their activation need accurate designing and add to the complexity. Optimizing generated step sizes by employing the simpler MPO methods can be seen as a promising research area to devise robust MPPT methods.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}