
Optimal Actuator Placement for Real-Time Hybrid Model Testing Using Cable-Driven Parallel Robots



Abstract
:1. Introduction
- Whereas there is some margin for load (forces and moments) tracking errors in typical CDPR applications, accurate load tracking is paramount to ensure high-fidelity ReaTHM testing [31]. Therefore, the relative focus on accurate load control is considerably higher for the latter.
- For typical CDPR applications, a higher stiffness throughout the workspace may be preferable to minimise undesired perturbations from external disturbances [24]. Conversely, for ReaTHM testing, a lower stiffness is preferable, to make the setup less sensitive to platform motions (this relates to delay-induced errors, as discussed in [32]).
- Given similar platform dimensions, the actuation system in typical CDPR applications carries larger loads than in ReaTHM testing and must be designed accordingly.
- In ReaTHM testing, the platform design is fixed to the emulation target, whereas in typical CDPR applications multiple platform designs may serve the same purpose.
2. Problem Formulation
2.1. Force Allocation
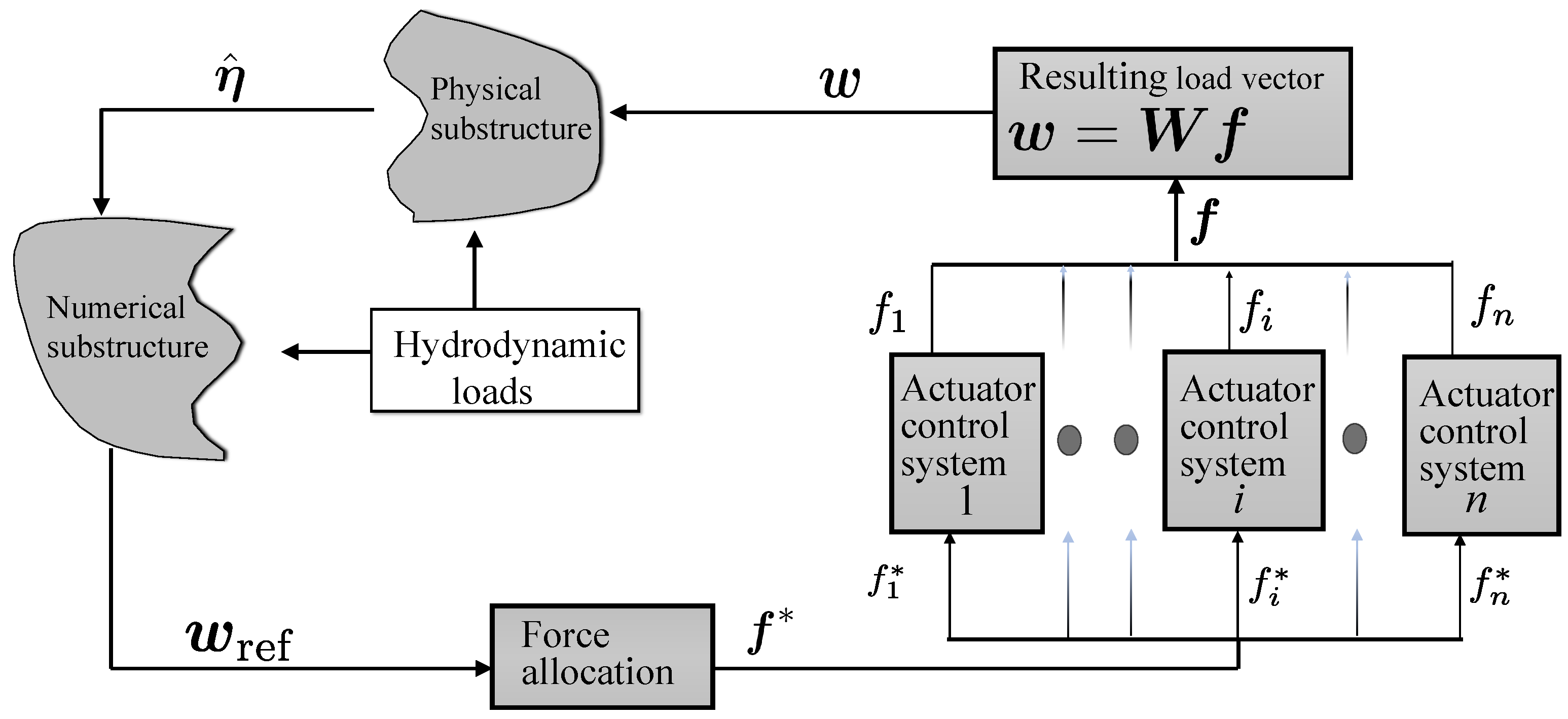
2.2. The ReaTHM Testing Loop
- Hydrodynamic loads act on both the numerical and physical substructure throughout the test.
- The numerical substructure is driven by the pose estimate . This generally deviates from the true pose due to delays and estimation errors.
- For the actuator control system, the goal is for the applied cables tensions to track the optimal cable tensions closely. in our research group work, we consider the control of each actuator independently. See for example [6].
- The resulting load vector generally deviates from the reference load vector due to delays, mischaracterisation of , force estimation errors, and target force tracking errors [8]. In this paper, accurate load tracking refers to tracking closely.
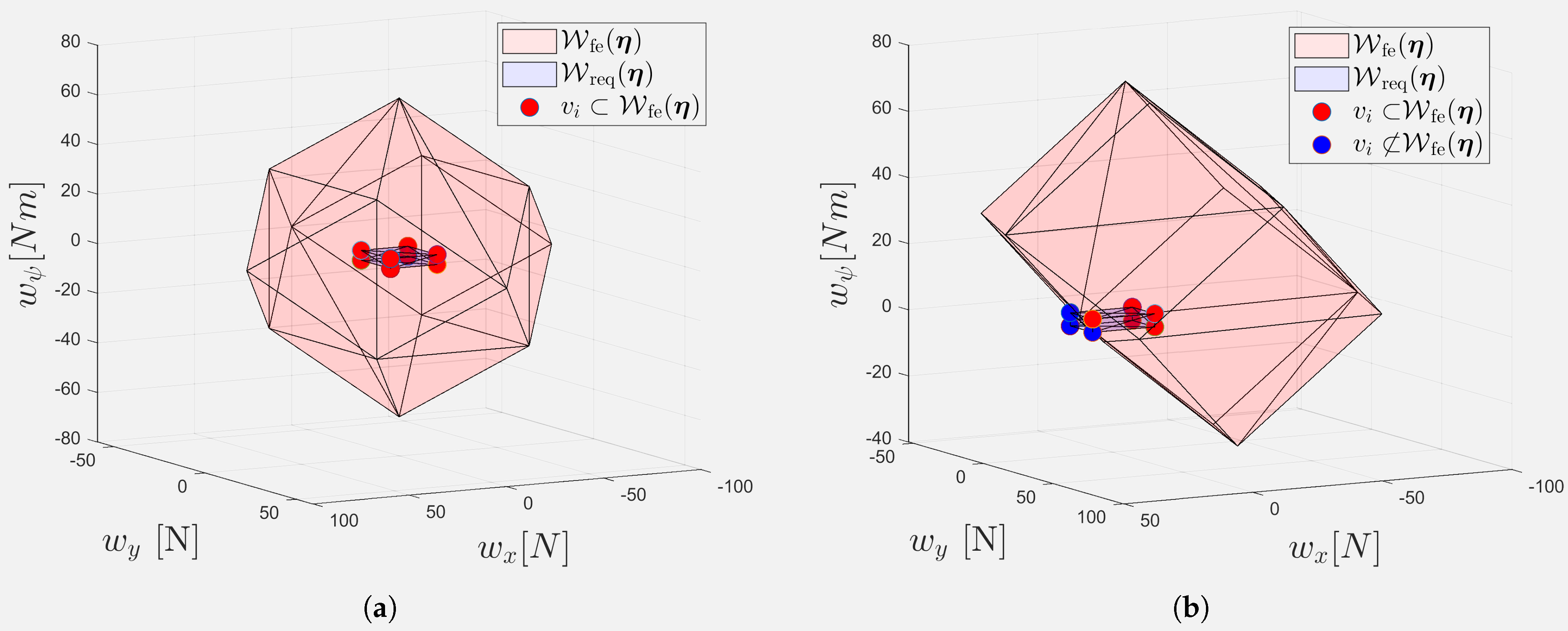
2.3. Wrench Feasible Workspace
2.4. Cable Collision
| Algorithm 1Cable Collision. |
| Critical collision distance. |
| for each pose in the grid do |
| for each cable, find minimum distances {d} to all other line segments. |
| if ) then define as collision (or refine search). |
| end if |
| end for |
2.5. Configuration Performance Measure
3. Procedure for Optimal Actuator Placement in ReaTHM Testing
3.1. Performance Measure
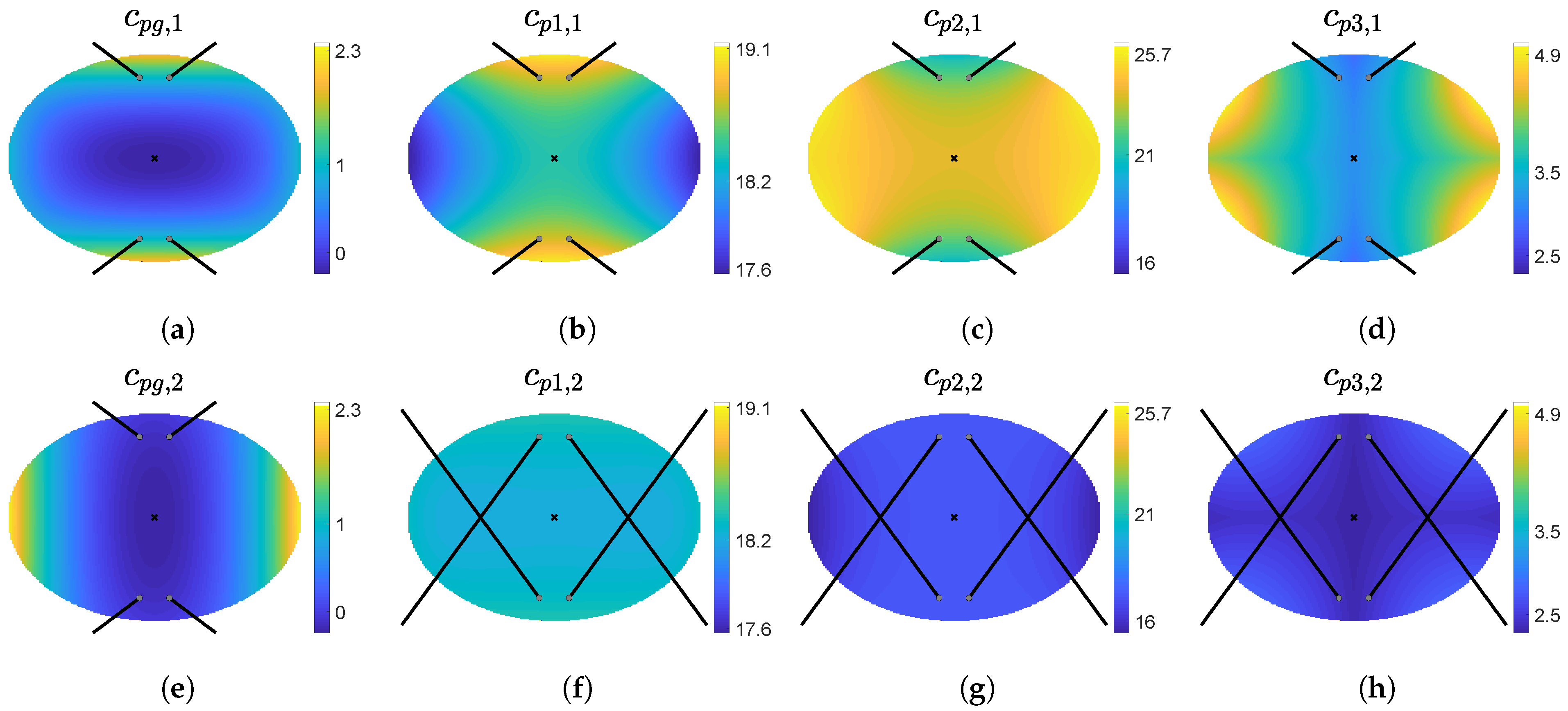
- —(quality of tension distribution) associates the cable tensions with the cost captured by the cost function. The cost function is assumed to be designed such that the actuated cables operate at higher performance when is low.
- —(load vector sensitivity) is a measure of the sensitivity of the optimal cable tensions to a change in the reference load vector. Since is the minimiser of the optimisation problem, the term can also be interpreted as a controllability measure that takes the cost function and constraints into account—as opposed to simpler controllability measures based on eigenvectors [22].
- —(motion sensitivity) is a measure of the optimal cable tensions sensitivity to platform motions. The intent is to limit the sensitivity of the optimal cable tensions to motions – to generate smoother trajectories that are easier to track.
- —(kinematic mapping sensitivity) quantifies the actual load vector’s sensitivity to changes in , given fixed cable tensions . Keeping low reduces force allocation errors by making the load vector less sensitive to small errors in the pose estimates . See discussion on force allocation errors in [8]. The term also reduces the stiffness in the weighted degrees of freedom (specifically it reduces stiffness induced from internal forces, which is one of two components of the overall stiffness of a CDPR mechanism [48]).
3.2. Procedure Description
- (Problem specification) Specify the number of actuators n, the cable cost function , the cable tension constraints and , the workspace requirements , the performance measure weights , and the constraints in the placement of actuators.
3.3. General Guidelines for Problem Specification in Procedure 1
3.3.1. Controlled Degrees of Freedom and the Number of Actuators
- In ReaTHM testing of a floating offshore wind turbine reported in [3,7,50], leaving out the vertical component of is shown to have negligible effect on the motions of the wind turbine, mooring force and internal loads. The physical platform is actuated in five DOFs (), using six cabled actuators ().
- In ReaTHM testing of a moored buoy reported in [51] it is argued that out-of-plane numerical load components can be neglected. Due to the circular, symmetrical shape of the buoy, the yaw moment is also neglected. The physical platform is actuated in two DOFs (), using three cabled actuators ().
3.3.2. Actuator Tension Constraints and Cost function
3.3.3. Workspace Requirements
3.3.4. Constraints in Placement of Actuators
3.3.5. Performance Weights
- Since and both relate to target force tracking, they are scaled relative to each other and in proportion to the expected variation in and –under the assumption that it is easier to track target forces that vary less.
- Next is determined by considering the importance of force allocation errors relative to force tracking errors. If the expected accuracy of is high, can be reduced relative to and , and increased in the opposite case.
- Next, the entries of are determined in proportion to the expected dynamic range and the variations of and . For example, an expectation of large variations in , corresponds to an increase in and , as these scaling parameters capture sensitivity to changes in . Conversely, an expectation of large variations of corresponds to an increase in , since this scaling parameter captures sensitivity to .
- Finally, the cost vector gain is chosen according to the importance of having a low cost function value relative to keeping the other terms low. This gain will be highly dependent on the selected cost function.
4. Optimal Placement of Actuators for ReaTHM Testing of a Barge
4.1. Problem Specification
4.1.1. Controlled Degrees of Freedom and the Number Of Actuators
4.1.2. Constraints in Placement of Actuators
- Each actuator protrudes 10 cm out from the basin wall.
- The actuators shall be symmetrically placed along the basin walls.
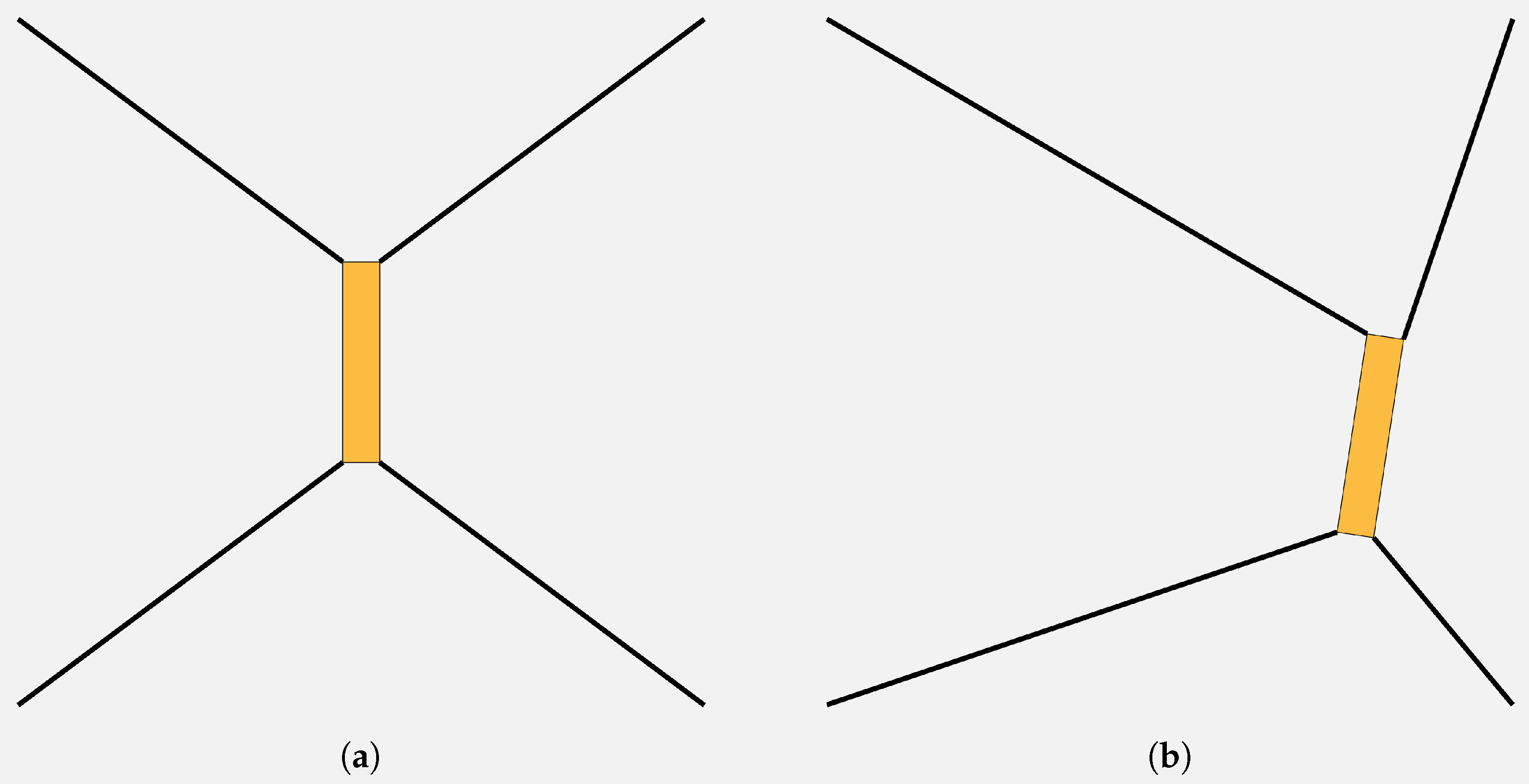
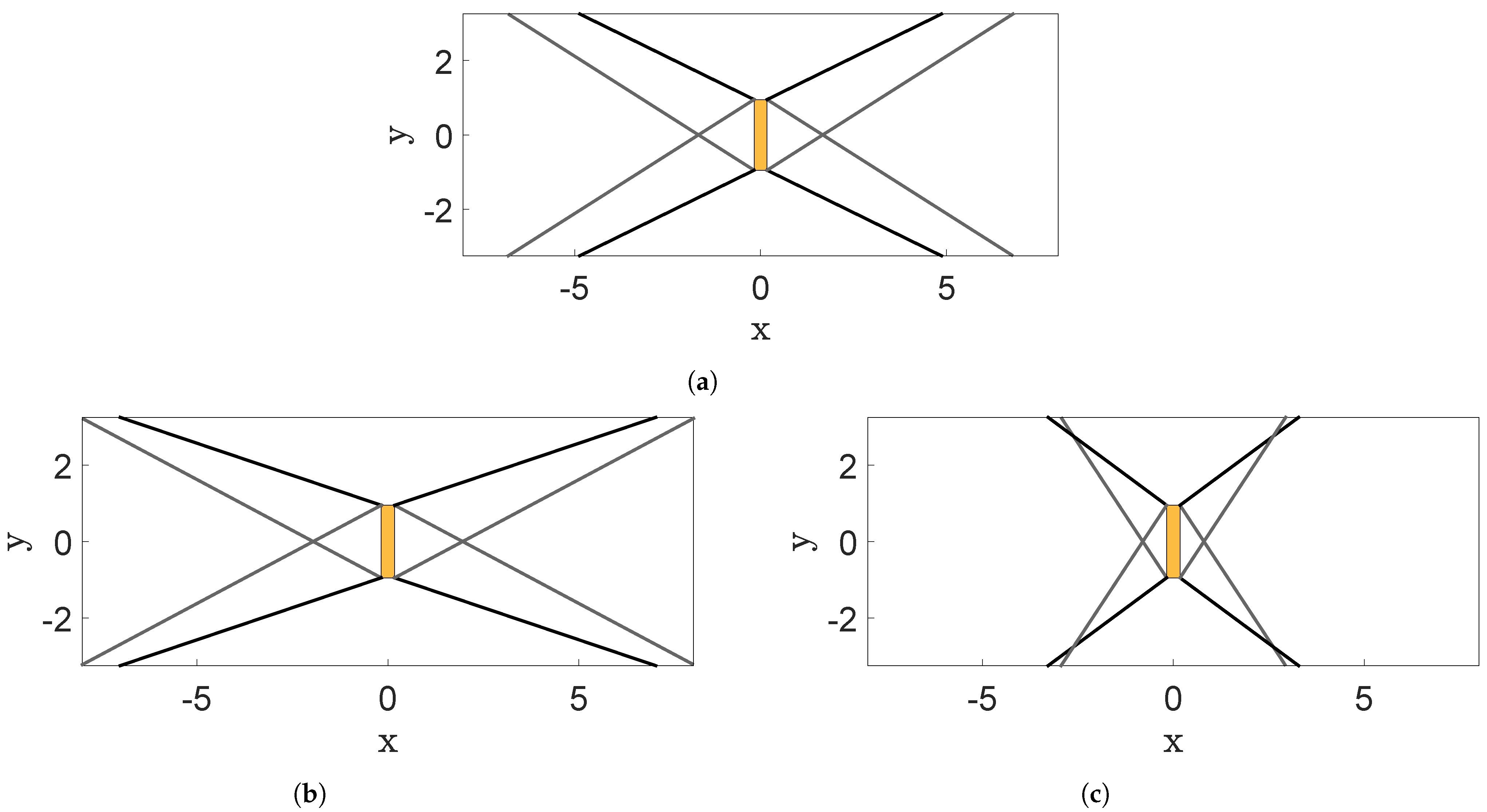
- Cable 1 may cross Cable 2, and Cable 3 may cross Cable 4 (as in [8]). In case of cable crossing, the cables are raised or lowered by 2.5 centimetres to avoid cable collision. It is assumed that the effect that the introduced z-component of the force has on the emulated system is negligible compared to hydrostatic and hydrodynamic loads.
4.1.3. Wrench Feasibility and Workspace Requirements
4.1.4. Cost Function


4.1.5. Performance Measure Weights

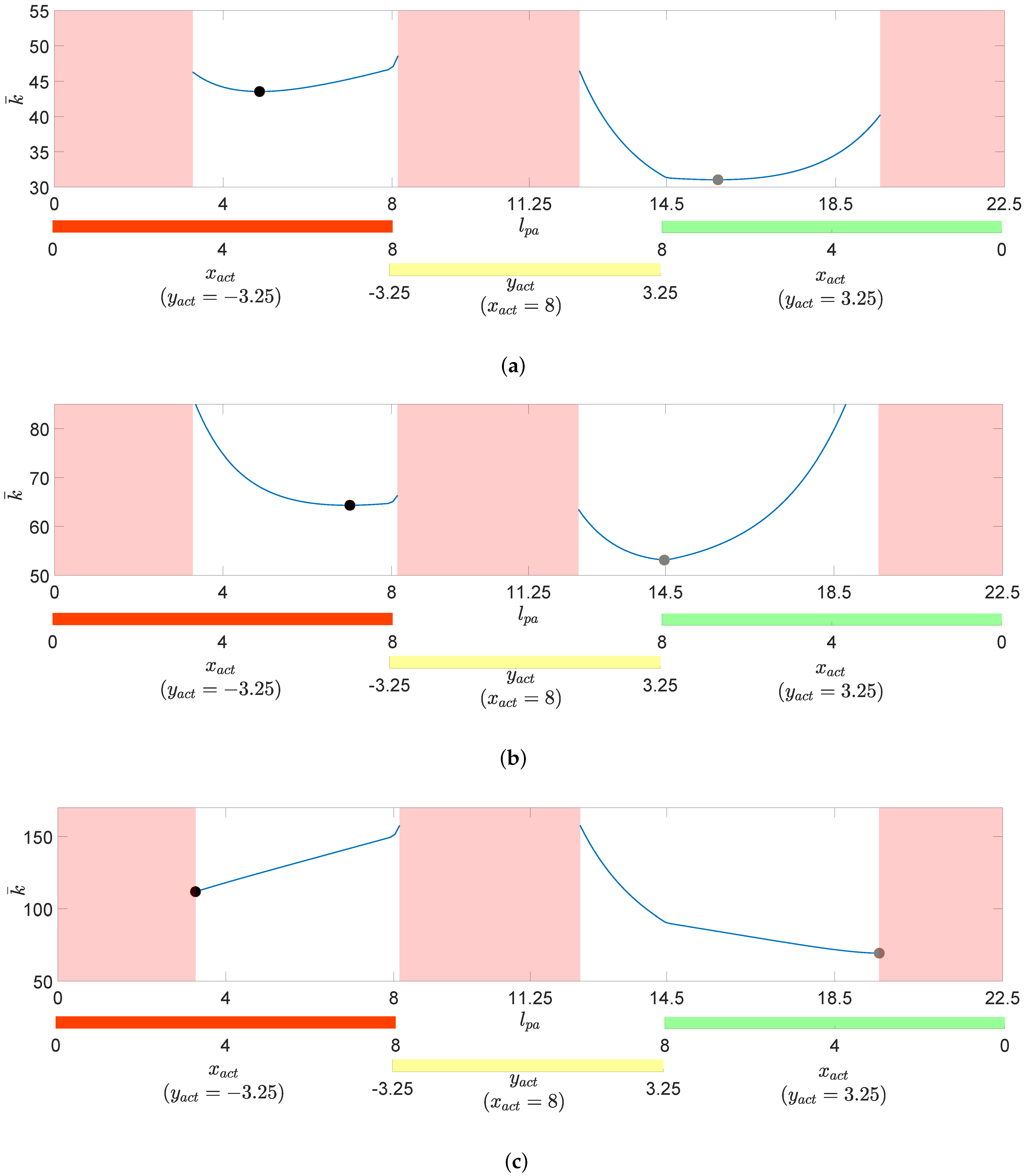
4.2. Determination of Optimal Actuator Placement
4.3. A Delimiting Note
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CDPR | Cable-driven parallel robot |
| ReaTHM testing | Real-time hybrid model testing |
| DOF | Degrees of freedom |
| ReaTHM® testing is a registered trademark of SINTEF Ocean. | |
Appendix A. Expression for the Terms of (8)
References
- Sauder, T. Fidelity of Cyber-Physical Empirical Methods: A Control System Perspective. In Experimental Techniques; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–17. [Google Scholar]
- Chabaud, V. Real-Time Hybrid Model Testing of Floating Wind Turbines. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2016. [Google Scholar]
- Sauder, T.; Chabaud, V.; Thys, M.; Bachynski, E.E.; Sæther, L.O. Real-time hybrid model testing of a braceless semi-submersible wind turbine: Part I—The hybrid approach. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers Digital Collection, Busan, Korea, 19–24 June 2016. [Google Scholar]
- Chakrabarti, S. Physical model testing of floating offshore structures. In Proceedings of the Dynamic Positioning Conference, Citeseer, HO, USA, 13–14 October 1998. [Google Scholar]
- Sauder, T.; Tahchiev, G. From soft mooring to active positioning in laboratory experiments. In Proceedings of the 39th International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers Digital Collection, Virtual, Online, 3–7 August 2020. [Google Scholar]
- Vilsen, S.A.; Sauder, T.; Sørensen, A.J.; Føre, M. Method for Real-Time Hybrid Model Testing of ocean structures: Case study on horizontal mooring systems. Ocean. Eng. 2019, 172, 46–58. [Google Scholar] [CrossRef]
- Chabaud, V.B.; Eliassen, L.; Thys, M.; Sauder, T.M. Multiple-degree-of-freedom actuation of rotor loads in model testing of floating wind turbines using cable-driven parallel robots. J. Phys. Conf. Ser. 2018, 1104, 012021. [Google Scholar] [CrossRef]
- Ueland, E.S.; Skjetne, R.; Vilsen, S.A. Force Actuated Real-Time Hybrid Model Testing of a Moored Vessel: A Case Study Investigating Force Errors. FAC-PapersOnLine 2018, 51, 74–79. [Google Scholar] [CrossRef]
- Gosselin, C.; Grenier, M. On the determination of the force distribution in overconstrained cable-driven parallel mechanisms. Meccanica 2011, 46, 3–15. [Google Scholar] [CrossRef]
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Rodnunsky, J.; Bayliss, T. Aerial Cableway and Method for Filming Subjects in Motion. U.S. Patent 5,224,426, 6 July 1993. [Google Scholar]
- Pott, A.; Mütherich, H.; Kraus, W.; Schmidt, V.; Miermeister, P.; Verl, A. IPAnema: A family of cable-driven parallel robots for industrial applications. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Newman, M.; Zygielbaum, A.; Terry, B. Static analysis and dimensional optimization of a cable-driven parallel robot. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Horoub, M.; Hawwa, M. Influence of cables layout on the dynamic workspace of a six-DOF parallel marine manipulator. Mech. Mach. Theory 2018, 129, 191–201. [Google Scholar] [CrossRef]
- Kraus, W.; Schmidt, V.; Rajendra, P.; Pott, A. System identification and cable force control for a cable-driven parallel robot with industrial servo drives. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Oh, S.R.; Agrawal, S.K. Cable suspended planar robots with redundant cables: Controllers with positive tensions. IEEE Trans. Robot. 2005, 21, 457–465. [Google Scholar]
- Lamaury, J.; Gouttefarde, M. A tension distribution method with improved computational efficiency. In CDPRs; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Rushton, M.; Khajepour, A. Optimal actuator placement for vibration control of a planar cable-driven robotic manipulator. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Kim, Y.; Junkins, J.L. Measure of controllability for actuator placement. J. Guid. Control. Dyn. 1991, 14, 895–902. [Google Scholar] [CrossRef]
- Pusey, J.; Fattah, A.; Agrawal, S.; Messina, E. Design and workspace analysis of a 6–6 cable-suspended parallel robot. Mech. Mach. Theory 2004, 39, 761–778. [Google Scholar] [CrossRef]
- Aref, M.M.; Taghirad, H.D.; Barissi, S. Optimal design of dexterous cable driven parallel manipulators. Int. J. Robot. 2009, 1, 29–47. [Google Scholar]
- Abdolshah, S.; Zanotto, D.; Rosati, G.; Agrawal, S.K. Optimizing stiffness and dexterity of planar adaptive cable-driven parallel robots. J. Mech. Robot. 2017, 9, 031004. [Google Scholar] [CrossRef]
- Anson, M.; Alamdari, A.; Krovi, V. Orientation workspace and stiffness optimization of cable-driven parallel manipulators with base mobility. J. Mech. Robot. 2017, 9, 031011. [Google Scholar] [CrossRef]
- Jamshidifar, H.; Khajepour, A.; Fidan, B.; Rushton, M. Kinematically-constrained redundant cable-driven parallel robots: Modeling, redundancy analysis, and stiffness optimization. IEEE/ASME Trans. Mechatron. 2016, 22, 921–930. [Google Scholar] [CrossRef]
- Ouyang, B.; Shang, W. Wrench-feasible workspace based optimization of the fixed and moving platforms for cable-driven parallel manipulators. Robot. Comput. Integr. Manuf. 2014, 30, 629–635. [Google Scholar] [CrossRef]
- Song, D.; Zhang, L.; Xue, F. Configuration optimization and a tension distribution algorithm for cable-driven parallel robots. IEEE Access 2018, 6, 33928–33940. [Google Scholar] [CrossRef]
- Azizian, K.; Cardou, P. The dimensional synthesis of planar parallel cable-driven mechanisms through convex relaxations. J. Mech. Robot. 2012, 4, 031011. [Google Scholar] [CrossRef]
- Bryson, J.T.; Jin, X.; Agrawal, S.K. Optimal design of cable-driven manipulators using particle swarm optimization. J. Mech. Robot. 2016, 8, 041003. [Google Scholar] [CrossRef] [PubMed]
- Gouttefarde, M.; Collard, J.F.; Riehl, N.; Baradat, C. Geometry selection of a redundantly actuated cable-suspended parallel robot. IEEE Trans. Robot. 2015, 31, 501–510. [Google Scholar] [CrossRef] [Green Version]
- Sauder, T.; Marelli, S.; Sørensen, A.J. Probabilistic robust design of control systems for high-fidelity cyber-physical testing. Automatica 2019, 101, 111–119. [Google Scholar] [CrossRef] [Green Version]
- Sauder, T.; Marelli, S.; Larsen, K.; Sørensen, A.J. Active truncation of slender marine structures: Influence of the control system on fidelity. Appl. Ocean. Res. 2018, 74, 154–169. [Google Scholar] [CrossRef] [Green Version]
- Ueland, E.; Sauder, T.; Skjetne, R. Force Tracking Using Actuated Winches with Position Controlled Motors for Use in Hydrodynamic Model Testing. IEEE Access 2021. submitted for publication. [Google Scholar]
- Hussein, H.; Santos, J.C.; Gouttefarde, M. Geometric optimization of a large scale CDPR operating on a building facade. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Robohub/Max Planck Institute for Biological Cybernetics. Cable-Driven Parallel Robots: Motion Simulation in a New Dimension. Available online: https://robohub.org/cable-driven-parallel-robots-motion-simulation-in-a-new-dimension (accessed on 15 May 2020).
- Fraunhofer IPA. Cable-Driven Parallel Robots. Available online: https://www.ipa.fraunhofer.de/en/expertise/robot-and-assistive-systems/intralogistics-and-material-flow/cable-driven-parallel-robot.html (accessed on 4 January 2021).
- Ueland, E.; Sauder, T.; Skjetne, R. Optimal Force Allocation for Overconstrained Cable-Driven Parallel Robots: Continuously Differentiable Solutions With Assessment of Computational Efficiency. IEEE Trans. Robot. 2020. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Ebert-Uphoff, I.; Voglewede, P.A. On the connections between cable-driven robots, parallel manipulators and grasping. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ’04), New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Bosscher, P.M. Disturbance Robustness Measures and Wrench-Feasible Workspace Generation Techniques for Cable-driven Robots. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2004. [Google Scholar]
- Gouttefarde, M.; Daney, D.; Merlet, J.P. Interval-analysis-based determination of the wrench-feasible workspace of parallel cable-driven robots. IEEE Trans. Robot. 2011, 27, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Bosscher, P.; Riechel, A.T.; Ebert-Uphoff, I. Wrench-feasible workspace generation for cable-driven robots. IEEE Trans. Robot. 2006, 22, 890–902. [Google Scholar] [CrossRef]
- Bouchard, S.; Gosselin, C.; Moore, B. On the ability of a cable-driven robot to generate a prescribed set of wrenches. J. Mech. Robot. 2010, 2, 011010. [Google Scholar] [CrossRef] [Green Version]
- Gouttefarde, M.; Krut, S. Characterization of parallel manipulator available wrench set facets. In Advances in Robot Kinematics: Motion in Man and Machine; Springer: Berlin/Heidelberg, Germany, 2010; pp. 475–482. [Google Scholar]
- Lahouar, S.; Ottaviano, E.; Zeghoul, S.; Romdhane, L.; Ceccarelli, M. Collision free path-planning for cable-driven parallel robots. Robot. Auton. Syst. 2009, 57, 1083–1093. [Google Scholar] [CrossRef]
- Perreault, S.; Cardou, P.; Gosselin, C.M.; Otis, M.J.D. Geometric determination of the interference-free constant-orientation workspace of parallel cable-driven mechanisms. J. Mech. Robot. 2010, 2, 031016. [Google Scholar] [CrossRef]
- Nguyen, D.Q.; Gouttefarde, M. On the improvement of cable collision detection algorithms. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Sunday, D. Distance between 3D Lines and Segments. Available online: https://geomalgorithms.com/a07-_distance.html (accessed on 15 May 2020).
- Bolboli, J.; Khosravi, M.A.; Abdollahi, F. Stiffness feasible workspace of cable-driven parallel robots with application to optimal design of a planar cable robot. Robot. Auton. Syst. 2019, 114, 19–28. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Lamaury, J.; Reichert, C.; Bruckmann, T. A Versatile Tension Distribution Algorithm for n-DOF Parallel Robots Driven by n+2 Cables. IEEE Trans. Robot. 2015, 31, 1444–1457. [Google Scholar] [CrossRef] [Green Version]
- Bachynski, E.E.; Chabaud, V.; Sauder, T. Real-time hybrid model testing of floating wind turbines: Sensitivity to limited actuation. Energy Procedia 2015, 80, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Vilsen, S.A.; Sauder, T.; Sørensen, A.J. Real-Time Hybrid Model Testing of Moored Floating Structures Using Nonlinear Finite Element Simulations. In Dynamics of Coupled Structures; Springer: Berlin/Heidelberg, Germany, 2017; Volume 4. [Google Scholar]
| 1. | What constitutes a typical CDPR application has been inferred based on the trends observed by examining a large number of references. Being trends only, there exist counterexamples for each statement in Table 1. |












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typical CDPR Applications. | CDPR for ReaTHM Testing (Using Load Control) | |
|---|---|---|
| (1) Control objective | A target pose is the control objective. Force/tension control may be used in an inner control loop to achieve the desired pose. See discussion in [32]. | A target load vector is the control objective, with pose trajectories following consequently [6]. |
| (2) External forces | The cabled actuators help ensure that the platform remains close to the desired pose in the presence of external excitations [33]. | The loads applied by the cabled actuators are in addition to other external loads (typically hydrodynamic) acting on the platform. the applied loads should not be disturbed by the external loads, nor the platform’s movements [8]. |
| (3) Platform weight | The platform is suspended in air, and the platform weight is carried by the cabled actuators. See Figure 4. | The platform is located in a water basin, and the cabled actuators do not carry its weight. See Figure 3. |
| (4) Design considerations | The CDPR setup is designed for the specific objectives of the application. Typical objectives include to carry a payload or to sense or interact with the environment in a specific way ([10] [Ch 2.4]). | The platform is designed to achieve similarity to the target ocean substructure it models (typically using Froude scaling). the objective is for the actuated load vector to track the reference load vector with high accuracy [7]. |
| (a) {} used throughout Section 4. | |||||||||
| 1 | 2 | 3 | 4 | ||||||
| x | 0.175 | 0.175 | −0.175 | −0.175 | |||||
| y | 0.95 | −0.95 | −0.95 | 0.95 | |||||
| z | 0 | 0 | 0 | 0 | |||||
| (b) Sample actuator configurations. | |||||||||
| {} | {} | ||||||||
| Actuator configuration 1 | Table 2 (a) | Table 2 (d) | |||||||
| Actuator configuration 2 | Table 2 (a) | Table 2 (e) | |||||||
| (c) Sample platform configurations | |||||||||
| Platform configuration 1 | Actuator configuration 1 with | ||||||||
| Platform configuration 2 | Actuator configuration 1 with | ||||||||
| (d) uncrossed configuration | (e) crossed configuration | ||||||||
| 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 | ||
| x | 3.25 | 3.25 | −3.25 | −3.25 | x | 3.25 | 3.25 | −3.25 | −3.25 |
| y | 3.25 | −3.25 | −3.25 | 3.25 | y | −3.25 | 3.25 | 3.25 | −3.25 |
| z | 0 | 0 | 0 | 0 | z | −0.025 | 0.025 | −0.025 | 0.025 |
| Platform configuration 1 | −2.3784 | |||
| Platform configuration 2 | −1.9314 |
| Uncrossed Configuration | Crossed Configuration | |
|---|---|---|
| () | () | |
| Prioritisation 1 | (4.86, 3.25) | (6.78, −3.25) |
| Prioritisation 2 | (7.01, 3.25) | (8, −3.22) |
| Prioritisation 3 | (3.28, 3.25) | (2.94, −3.25) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ueland, E.; Sauder, T.; Skjetne, R. Optimal Actuator Placement for Real-Time Hybrid Model Testing Using Cable-Driven Parallel Robots. J. Mar. Sci. Eng. 2021, 9, 191. https://doi.org/10.3390/jmse9020191
Ueland E, Sauder T, Skjetne R. Optimal Actuator Placement for Real-Time Hybrid Model Testing Using Cable-Driven Parallel Robots. Journal of Marine Science and Engineering. 2021; 9(2):191. https://doi.org/10.3390/jmse9020191
Chicago/Turabian StyleUeland, Einar, Thomas Sauder, and Roger Skjetne. 2021. "Optimal Actuator Placement for Real-Time Hybrid Model Testing Using Cable-Driven Parallel Robots" Journal of Marine Science and Engineering 9, no. 2: 191. https://doi.org/10.3390/jmse9020191
APA StyleUeland, E., Sauder, T., & Skjetne, R. (2021). Optimal Actuator Placement for Real-Time Hybrid Model Testing Using Cable-Driven Parallel Robots. Journal of Marine Science and Engineering, 9(2), 191. https://doi.org/10.3390/jmse9020191