1. Introduction
The ocean environment is a potential treasury of resources, including a variety of living creatures, mineral deposits and sustainable energy [
1]. In the last 20 years, many efforts have been made to develop marine tools for the ocean exploration and exploitation. Remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) are two common tools among the marine robots [
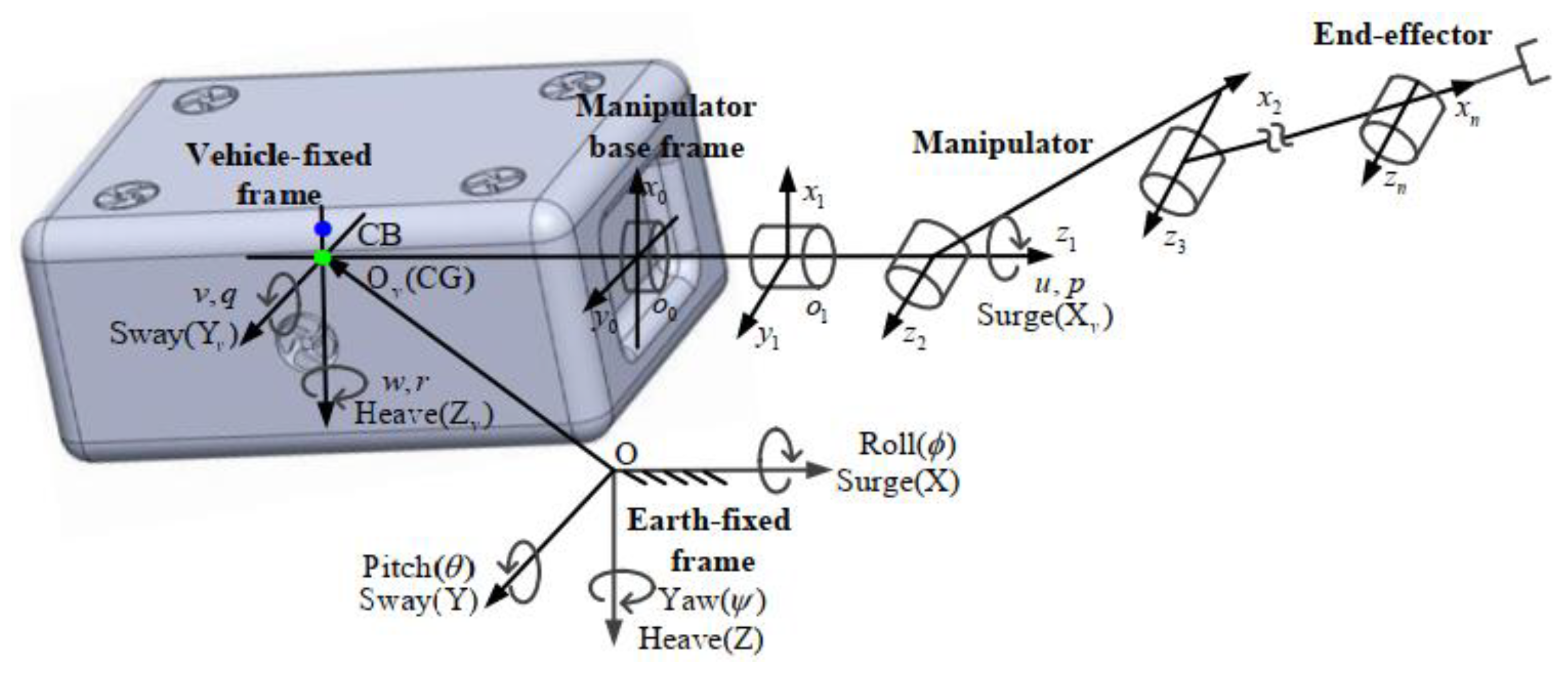
2]. In particular, an underwater vehicle-manipulator system (UVMS) that contains an underwater vehicle equipped with one or multiple underwater manipulators, has been applied more significantly in underwater tasks than the underwater vehicle or underwater manipulator only. Nevertheless, it is difficult to achieve the trajectory tracking control of the UVMS end-effector.
On the one hand, the UVMS is kinematically redundant because its total degrees of freedom are usually more than the task-space coordinates that are at most six dimensions. Thus, such redundant system admits infinite numbers of the joint-space solutions for the specific coordinates in the task space. Subsequently, lots of inverse kinematic schemes have been proposed to handle the redundant issue, like weighted pseudo-inverse method merged with the fuzzy technique [
3]. Apart from the fuzzy technique, the joint fault-tolerant property has been used for redundancy resolution and coordinated motion of a remotely operated UVMS [
4], while the payload can be considered as one of the secondary objectives for optimizing the UVMS’s attitude [
5]. Another coordinated motion algorithm for the UVMS has been investigated along with minimizing restoring moment [
6]. Moreover, since the secondary tasks were handled in the null space of the primary task Jacobian, they had no influence on the primary task but can achieve other additional manipulation, so the inverse kinematic scheme should be designed properly for settling the kinematic redundancy of the UVMS.
Another difficult problem is to handle the parameter uncertainties and external disturbances of the UVMS in the trajectory tracking control. Because the UVMS is subjected to dynamic natures like high nonlinear, strong coupled and time-varying from the interaction between vehicle and manipulator, and also suffers the disturbances caused by hydrodynamic effects and unknown underwater environment. So far, many advanced methods have been proved to be useful for nonlinear systems like underwater robots to solve such uncertain issues, such as sliding mode control (SMC) [
7,
8,
9,
10,
11], neural network control [
12], fuzzy logic control [
13], and so on. SMC has attracted large numbers of attentions on the controller design owing to its fast convergence and strong robustness with uncertainties. In [
7], a robust control method based on a multiple sliding surfaces has been proposed and utilized for nonlinear systems with uncertainties, so that the tracking errors can converge to small neighborhoods of the origin zero. Another robust double loop integral SMC tracking method has been addressed for the UVMS under external current disturbances [
8]. In [
9], a nonlinear dynamics SMC and robust positioning control has been presented for the over-actuated AUV under ocean current and model uncertainties, in which the dynamic sliding surface was more complex than that of the traditional PI-type in [
10]. Besides, an adaptive fast nonsingular integral terminal SMC scheme has been proposed for the trajectory tracking of unmanned underwater vehicles in [
11], where the singularity problem can be avoided. The fast non-singular integral terminal SMC method in [
11] can make the tracking errors achieve the finite-time convergence faster than those in [
9,
10]. The reason is that the latter can only ensure the asymptotic convergence of the tracking errors. Additionally, the chattering problem caused by the sliding mode switched gains can be eliminated with boundary layer technique [
14], high-order SMC [
15], etc. Neural network control and fuzzy logic control are widely applied for the control problem of the nonlinear systems, due to their capability of approximating linear or nonlinear functions accurately. By integrating radial basis function neural network and an adaptive compensator, a hybrid control approach has been developed for the trajectory tracking of AUVs [
12]. Meanwhile, the neural network method was used to approximate the unknown dynamics and the adaptive compensator was to compensate the unknown disturbance effects. Another adaptive fuzzy SMC method has been addressed for the trajectory tracking of multi-link underwater manipulators [
13], however, it can only ensure the boundness of the disturbance estimations but not involve in their fast convergence.
Alternatively, lots of disturbance observer methods have been proposed to handle the disturbance issues for the control system, so that the disturbance estimation errors can achieve fast convergence to decrease the effects on the system. Using a disturbance observer, a coordinated motion control scheme for an autonomous UVMS in the task space has been proposed [
16]. In combination with the PID-like fuzzy control scheme and a disturbance estimator, a robust nonlinear controller has been addressed for the trajectory tracking control of an autonomous UVMS [
17]. Based on an extended state observer (ESO), an integral SMC scheme has been presented for the underwater robot with disturbances and uncertainties [
18]. Another SMC scheme combining with the ESO has been proposed for an UVMS with prescribed performance [
19]. Moreover, the estimation errors of the lumped disturbances in [
18,
19] can be guaranteed to be uniformly bounded, rather than in [
16,
17] they can achieve the asymptotical convergence. Next, to solve the trajectory tracking problem of an AUV subjected to lumped disturbances, a non-singular fast fuzzy terminal SMC scheme with a disturbance estimator has been addressed [
20]. It showed that the estimation error of the lumped disturbances can converge to zero in finite time. Another adaptive disturbance observer has been proposed for the trajectory tracking control of underwater vehicles with uncertainties and external disturbances [
21], which can also guarantee the finite-time convergence of the estimation error to zero. In contrast, the finite-time convergence of the estimation error [
20,
21] can converge faster than the asymptotical convergence of those in [
16,
17]. In other way, a fixed-time super-twisting-like algorithm [
22] has been designed, in which its remarkable feature consists in the convergence time bounded by a constant independent of the initial state conditions. To meet the high precision operation requirements, suitable strategies should be made to acquire the trajectory tracking control of the UVMS despite the parameter uncertainties and external disturbances.
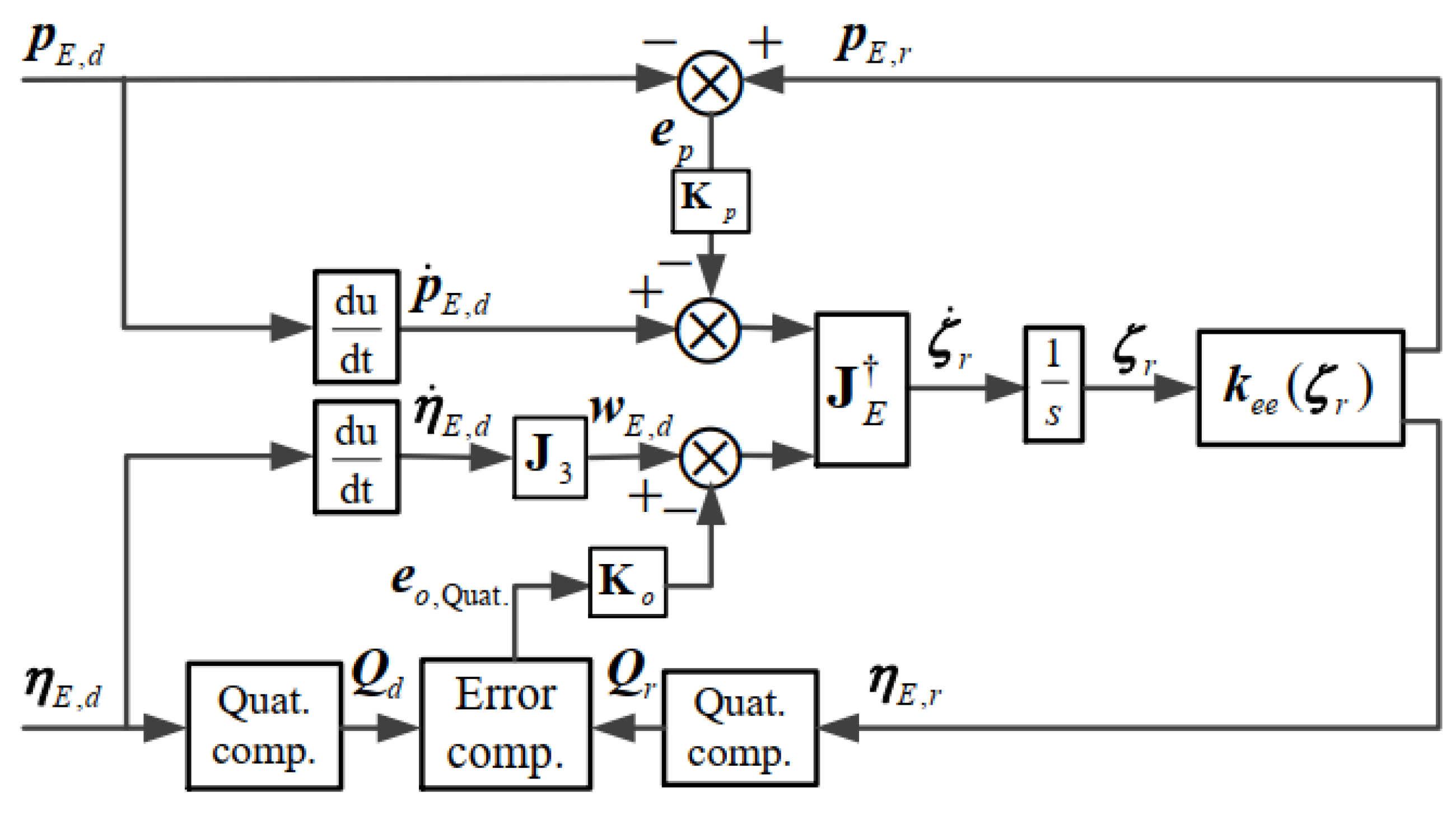
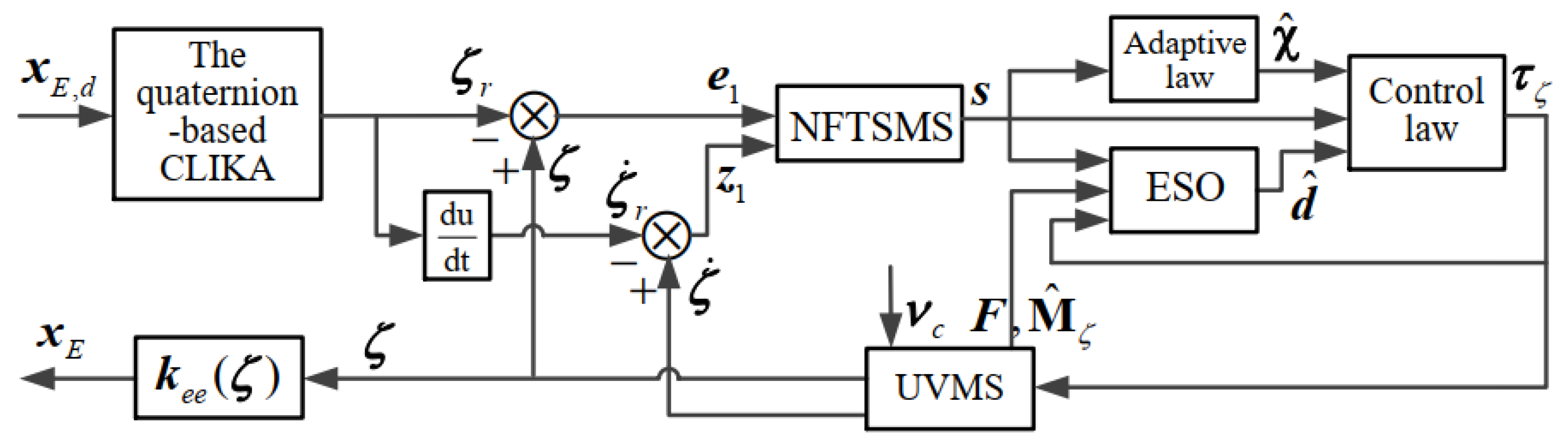
Motivated by the above analysis, in this paper an adaptive nonsingular fast terminal sliding mode control (NFTSMC) with ESO is proposed for the trajectory tracking of an UVMS with lumped disturbances, namely, parameter uncertainties and external disturbances. Firstly, the quaternion-based CLIKA is applied for solving the reference position and velocity values of the system through the desired position and orientation of the end-effector. Then, the proposed controller consists of the modified nonsingular fast terminal sliding mode surface (NFTSMS) and ESO, and the adaptive control law. The designed NFTSMS can make the tracking errors achieve fast convergence, along with avoiding the singularity in the derivation. By taking the lumped disturbance vector as an extended state of the UVMS, the fixed-time convergent ESO method is utilized to estimate the lumped disturbances, which can ensure the fixed-time convergence of the disturbance estimation errors. Meanwhile, the sign function replaced by a saturation function is introduced in the ESO to alleviate the chattering phenomenon. In general, the conventional robust term is used for the control law design to handle the unknown boundness of the disturbance estimation error, while it may cause the chattering due to its own discontinuity. Instead, an adaptive continuous fractional PI-type controller is to approximate the discontinuous robust term to handle such chattering problem. The closed-loop system can be proved to be asymptotically stable by the Lyapunov theory. Simulations of four control methods are performed on a ten degree-of-freedom (DOF) UVMS consisting of a four DOF underwater vehicle and a six DOF underwater manipulator. Comparative simulation results validate the effectiveness of the proposed controller.
Several contributions of this work can be summarized as follows: (1) We propose the quaternion-based CLIKA with replacement of using the Euler-angle form to simplify the inverse kinematics; (2) we design a NFTSMS that can avoid the singularity, so that the tracking errors can achieve the fast convergence; (3) We modify the ESO method to estimate the lumped disturbance term of the system, by introducing the saturation function instead of the sign function to alleviate the chattering and (4) we propose a continuous fractional PI-type controller to achieve the approximation to the conventional discontinuous robust term to reduce the chattering problem.
This paper is organized in four parts. First, it establishes the forward kinematics and the quaternion-based CLIKA of the UVMS, and its dynamic equations in the vehicle-fixed and the earth-fixed frames. Then, it presents the proposed adaptive NFTSMC method with ESO for the trajectory tracking control of the UVMS end-effector, and the Lyapunov theory is used to verify the system stability. Another part presents the simulation results using a ten degree-of-freedom (DOF) UVMS under several situations. Finally, some conclusions are obtained from the proposed controller.
4. Simulation
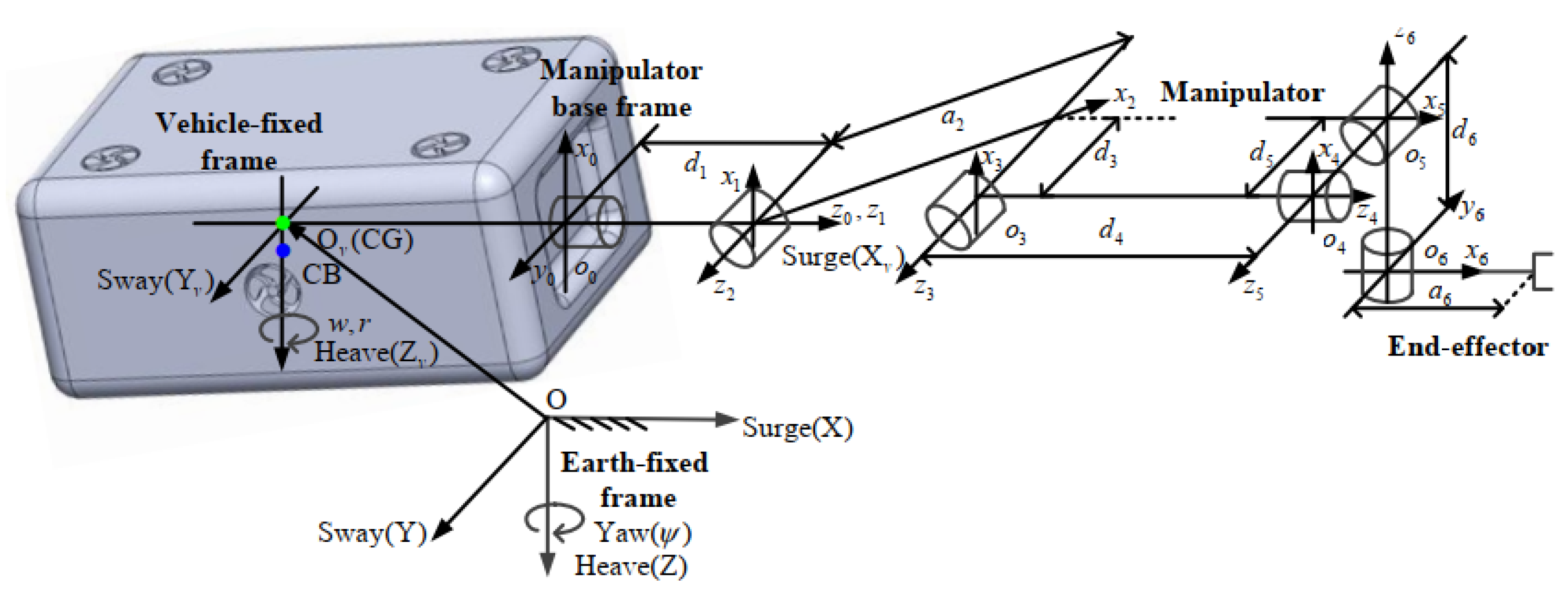
In this section, simulations with the help of MATLAB/Simulink toolbox are performed on a ten DOF UVMS, where the UVMS contains a four DOF underwater vehicle and a six DOF underwater manipulator, and its coordinated frames are shown in
Figure 4. Then, some assumptions are given in the following: the gravity of the underwater vehicle equals its buoyancy; The link density of the manipulator is 2700 kg/m
3, and the centre of buoyancy of the underwater manipulator is coincident with its centre of gravity; the density of the fluid is 1025.9 kg/m
3; the coefficient of water resistance
; The coefficient of additional mass force is
. The dynamic parameters of the vehicle are expressed in
Table 2 referring to [
31,
32], and its centres of gravity and buoyancy in the vehicle-fixed frame are [0, 0, 0] m and [0, 0, 0.04] m, respectively. The related link parameters of the manipulator are listed in
Table 3, and the position of the base origin in the vehicle-fixed frame is [0.5, 0, 0] m.
Assume that the desired trajectory and attitude of the UVMS end-effector can be formulated by:
The initial position and orientation of the UVMS end-effector is (−0.09 m, 0.4 m, −1.19 m, 0 rad, 0 rad, 0 rad). And, the ten DOF UVMS is considered to be subjected to the lumped disturbances, which contain the parameter uncertainties with , , , and , and the velocity of the water currents with (0.1, 0.1, 0) m/s in the earth-fixed frame. In addition, provided that the unknown external disturbance vector is expressed as: m/s2, m/s2, m/s2, rad/s2, rad/s2, rad/s2, rad/s2, rad/s2, rad/s2 and rad/s2. Then, the control strategies for the first three cases are presented in the following definitions.
In case 1, the controller is applied by the PID-ESO scheme with conventional robust term, whose control law is:
along with the adaptive law:
and the related ESO being expressed as:
with:
and, the control gains
and
are diagonal and positive definite matrices.
In case 2, the controller is designed by combining the PID-type SMC-ESO scheme and the conventional robust term, and its control law satisfies:
together with the SMC variable
in Equation (20) and the ESO coinciding with Equations (45) and (46), and the adaptive law satisfying:
In case 3, the control law of the PID-type SMC-ESO scheme with continuous fractional PI-type robust term is designed as:
where the SMC variable
is the same as that in Equation (20), and the continuous fractional PI-type robust term
is chosen as Equation (50) as well as the adaptive laws in Equations (48) and (51):
where
,
.
Proofs of the stability of the control systems for cases 1–3 have been given in the
Appendix A. Here, the proposed control scheme in Theorem 2 is considered as the fourth case. The related parameter values of the controllers in four cases are assigned in
Table 4. Besides, all of the initial values of the state vectors corresponding to the ESO and the adaptive laws are set as zeros. Moreover, the complete diagram of the simulation program for the UVMS is described in
Figure S45 of the Supplementary Materials.
To obtain the straight analysis for the simulation results, introducing the average position and orientation errors of the end-effector, and the average estimation error components of the lumped disturbances are expressed as follows:
where
and
denote the position error and orientation error vectors of the end-effector, respectively. And the vectors
,
are the components of the lumped disturbance estimation error vector.
,
,
, denote the
jth component vectors of the total control input vector in case
. The number of the simulation steps from 10 s to 50 s is
.
Subsequently, some simulation results under four cases for the trajectory tracking of the UVMS end-effector are described in
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17.
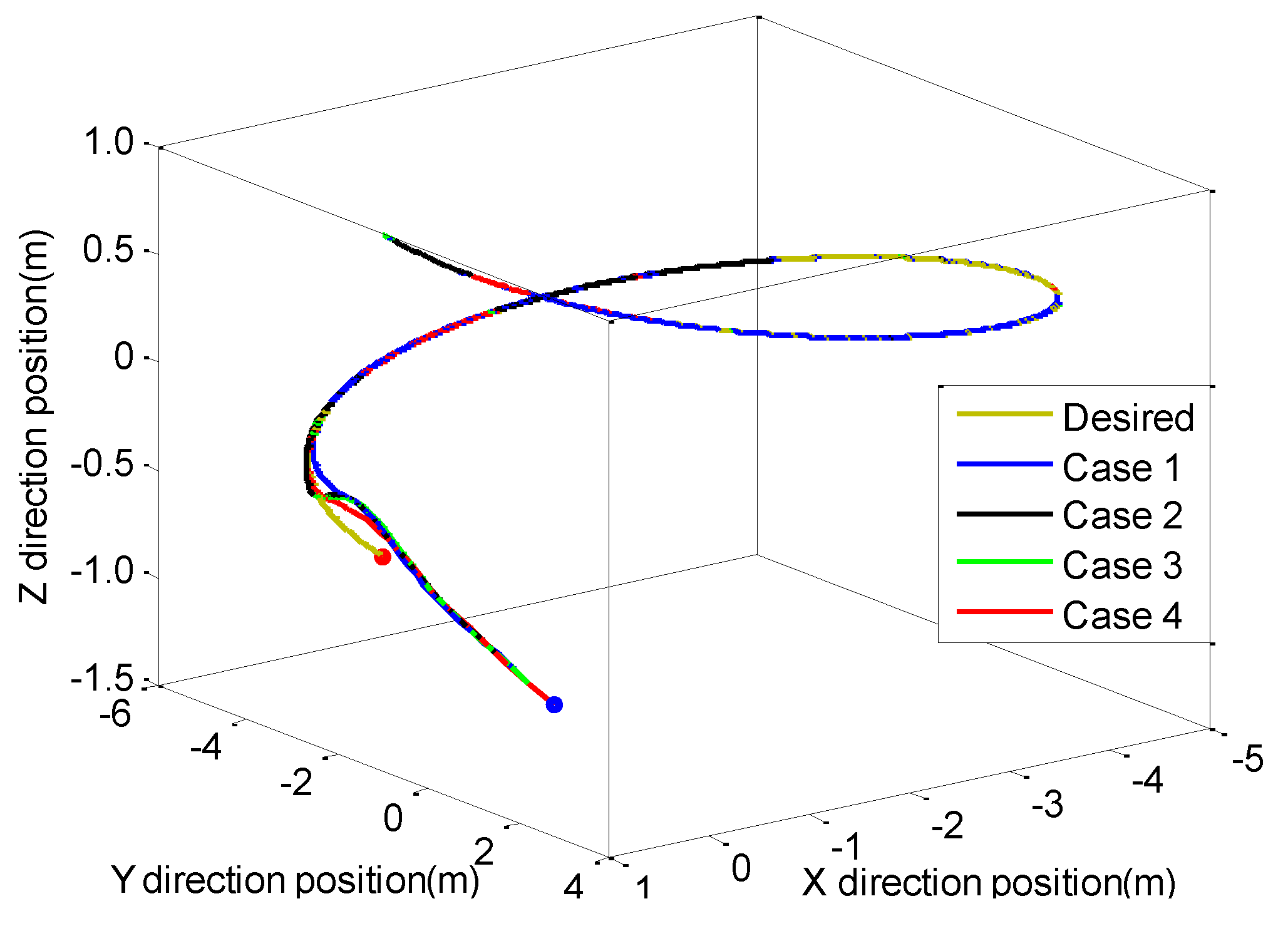
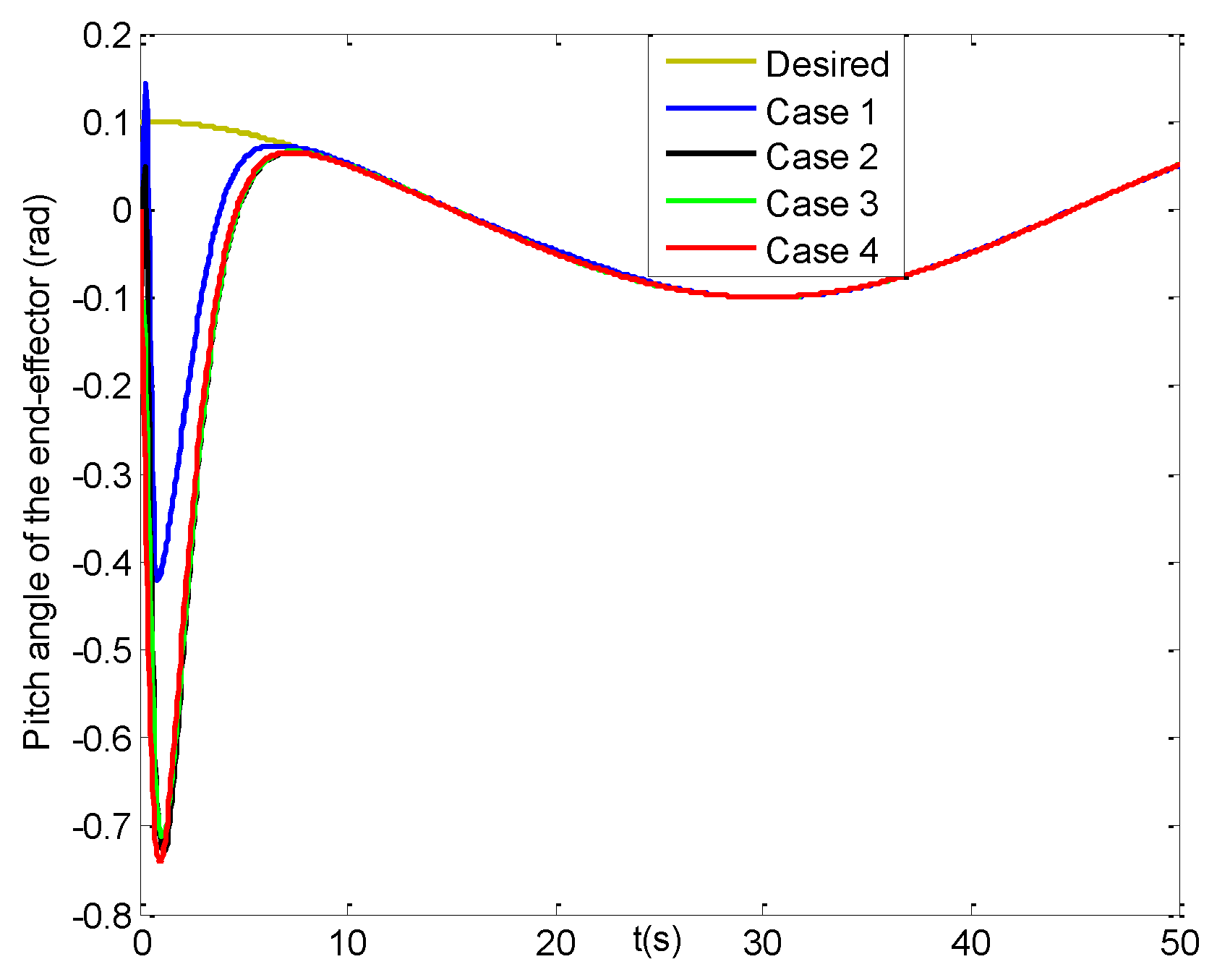
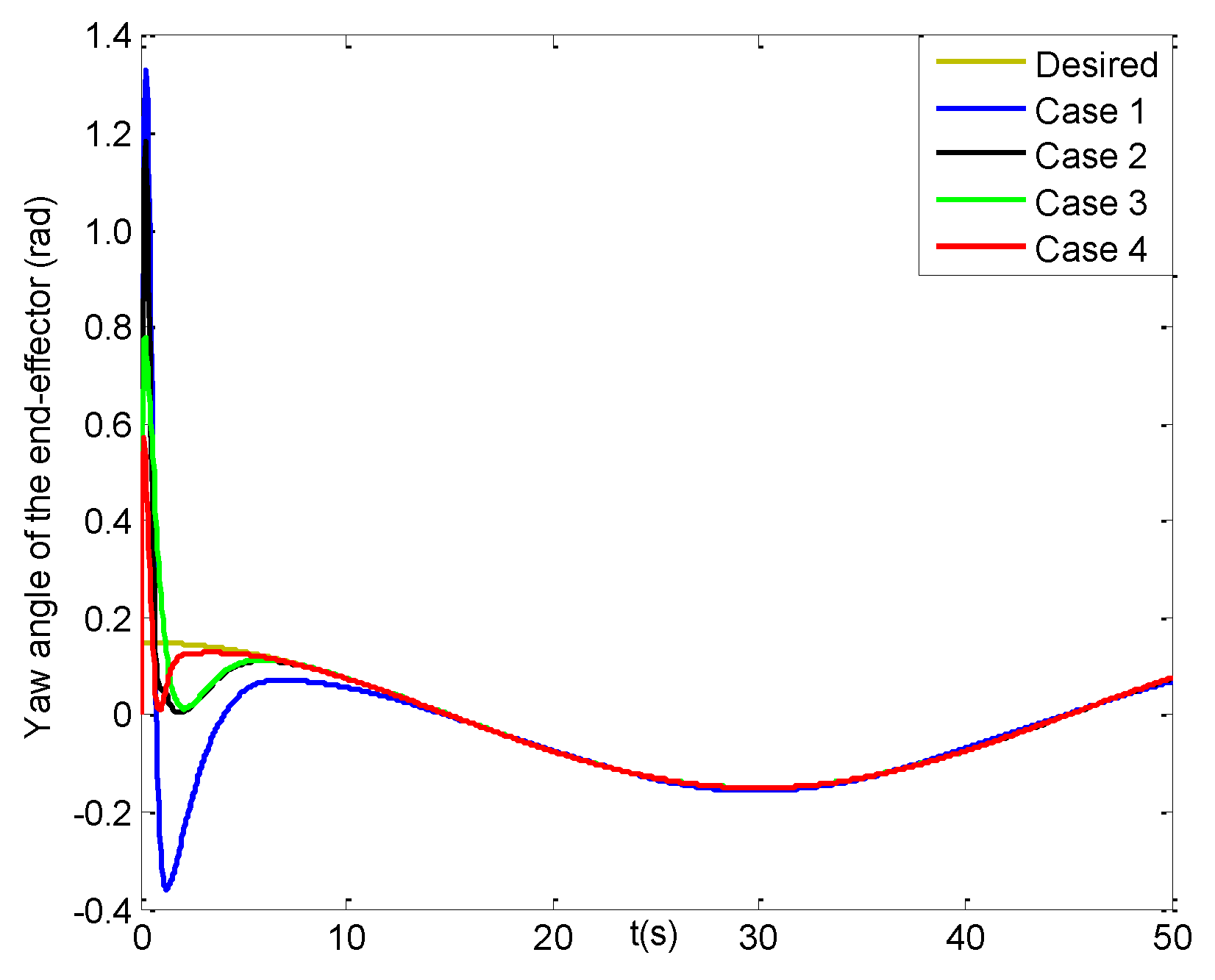
Figure 5 displays the time history of the desired and actual trajectories of the UVMS end-effector in cases 1–4. As seen from it, even if the initial position of the end-effector is quite different from the desired initial position, after a little time the positions of the end-effector can all achieve the fast tracking for the desired trajectory.
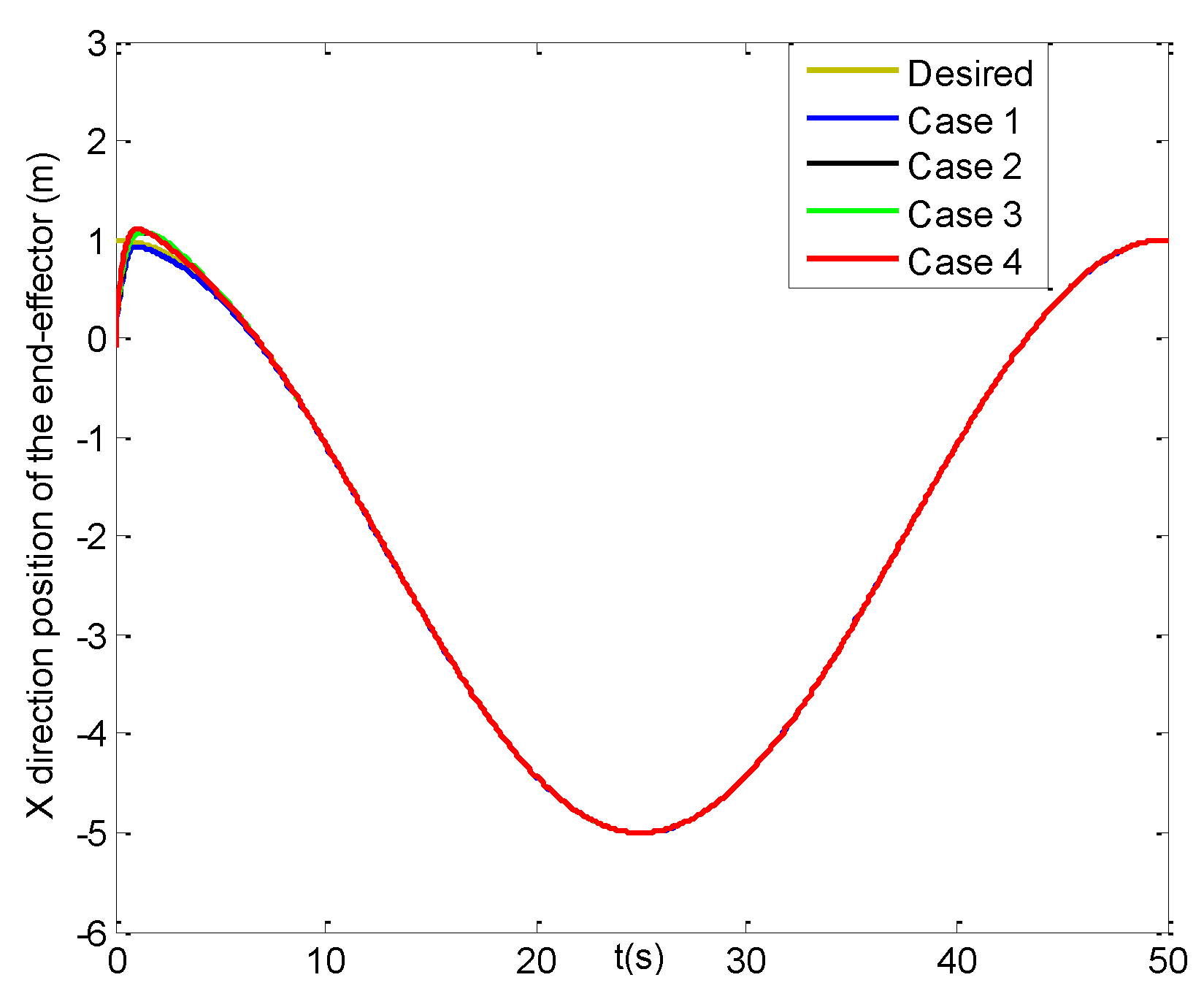
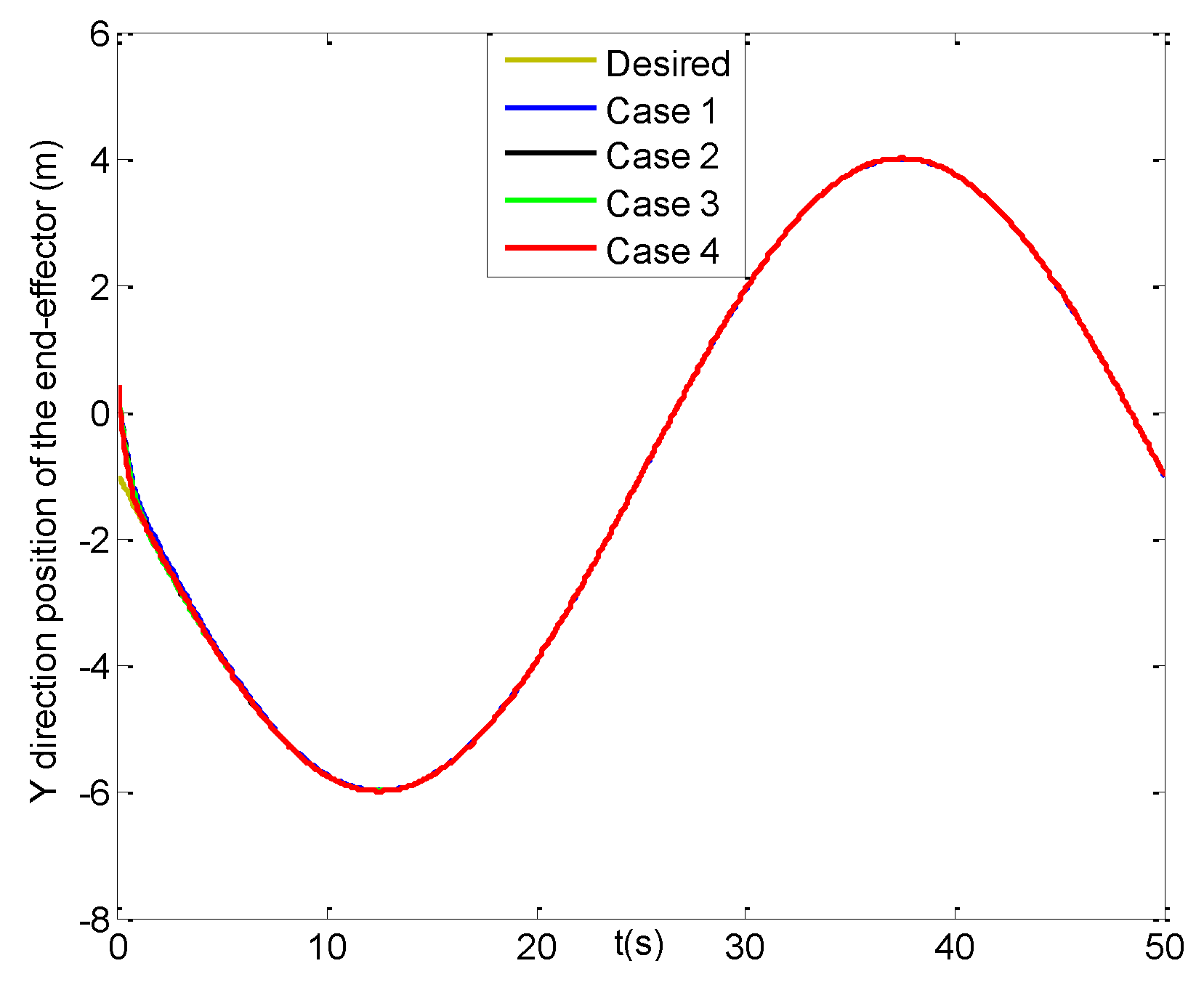
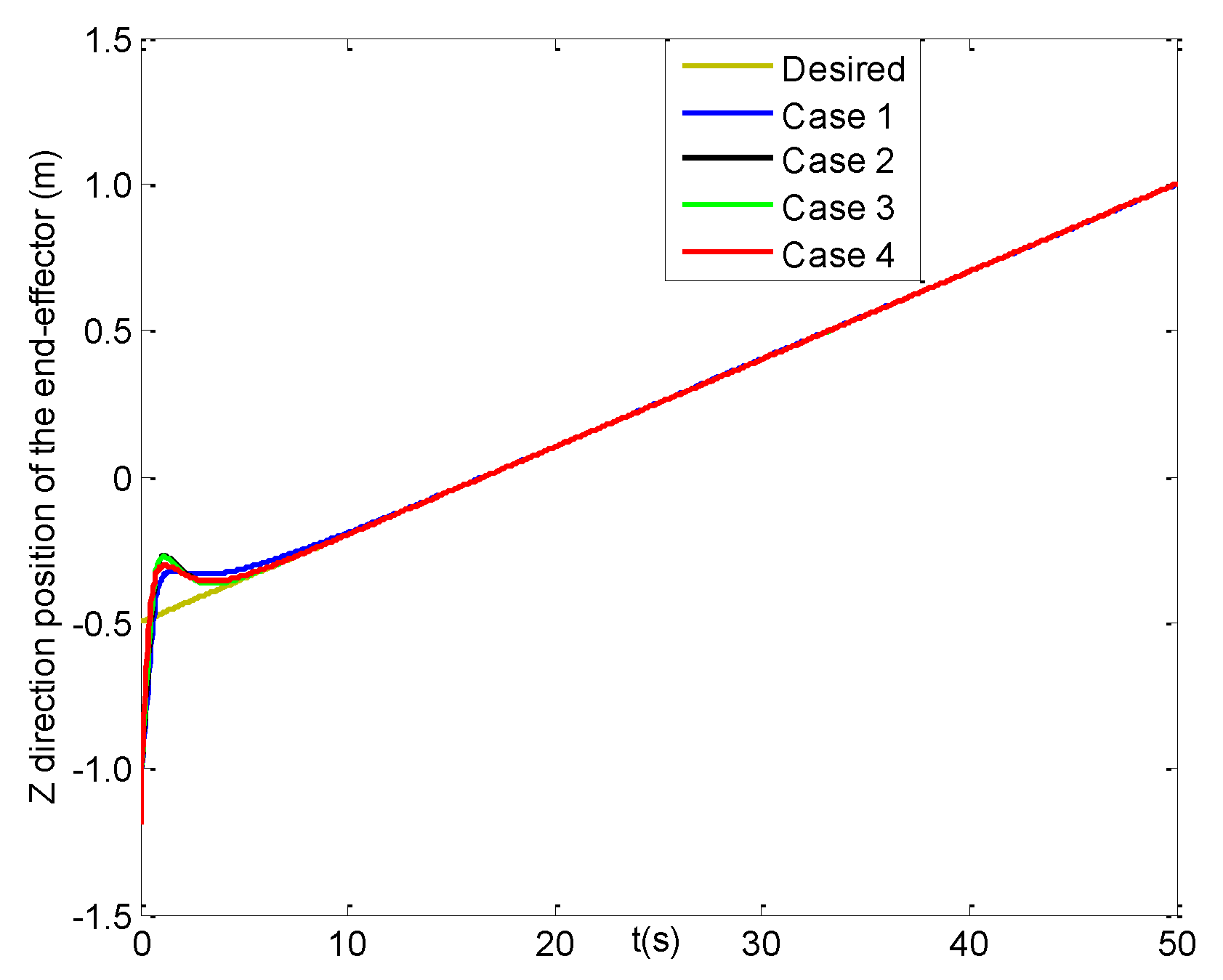
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11 present the tracking situation on the three direction positions and three orientation angles of the end-effector for four cases, respectively. Actually, in the beginning seconds all of the positions and orientation angles have a few differences from the desired values and then all of them can quickly reach the desired values, which are in accord with the results in
Figure 5. In the following
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
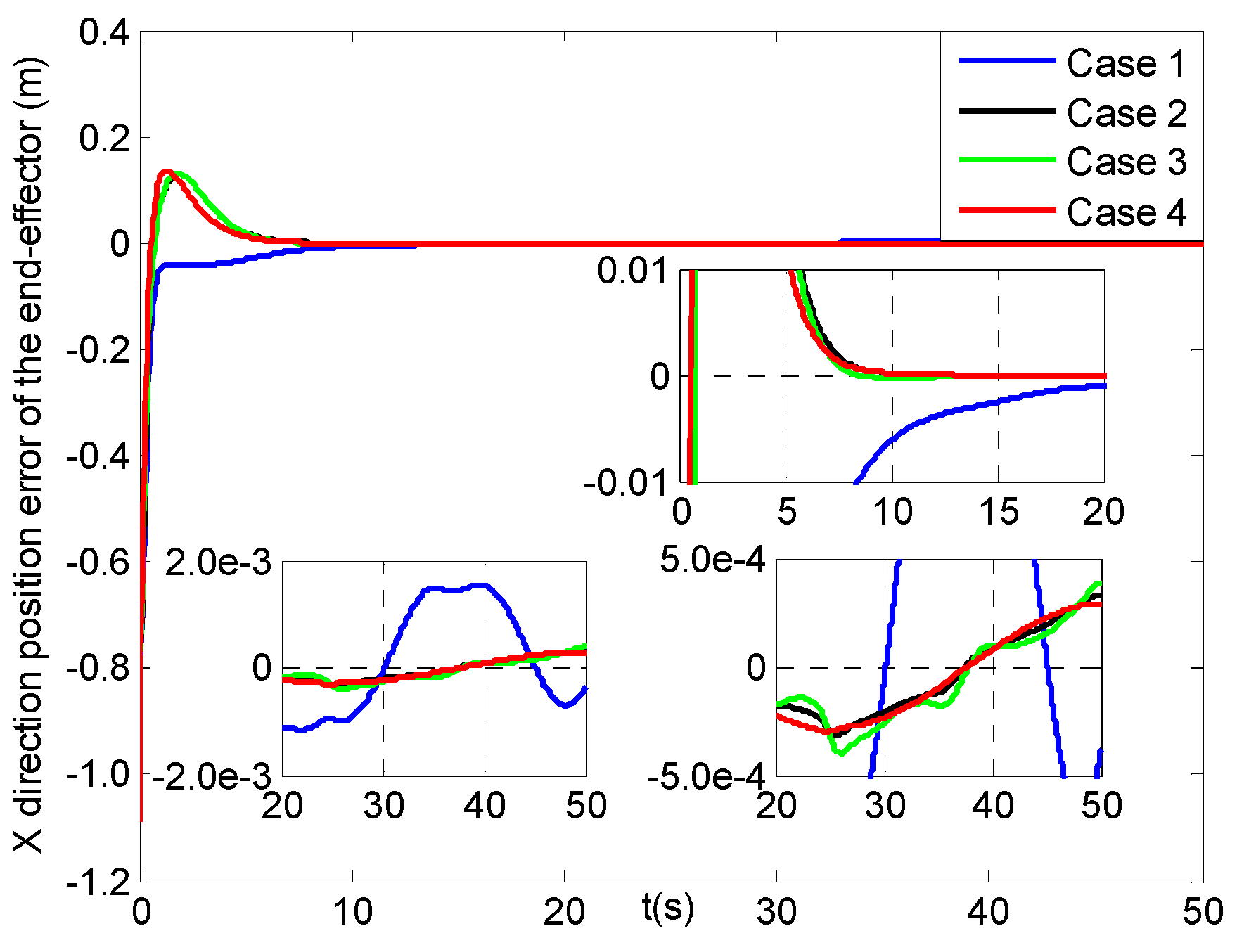
Figure 17, we can obtain some results for the three position and orientation angle errors of the end-effector.
From
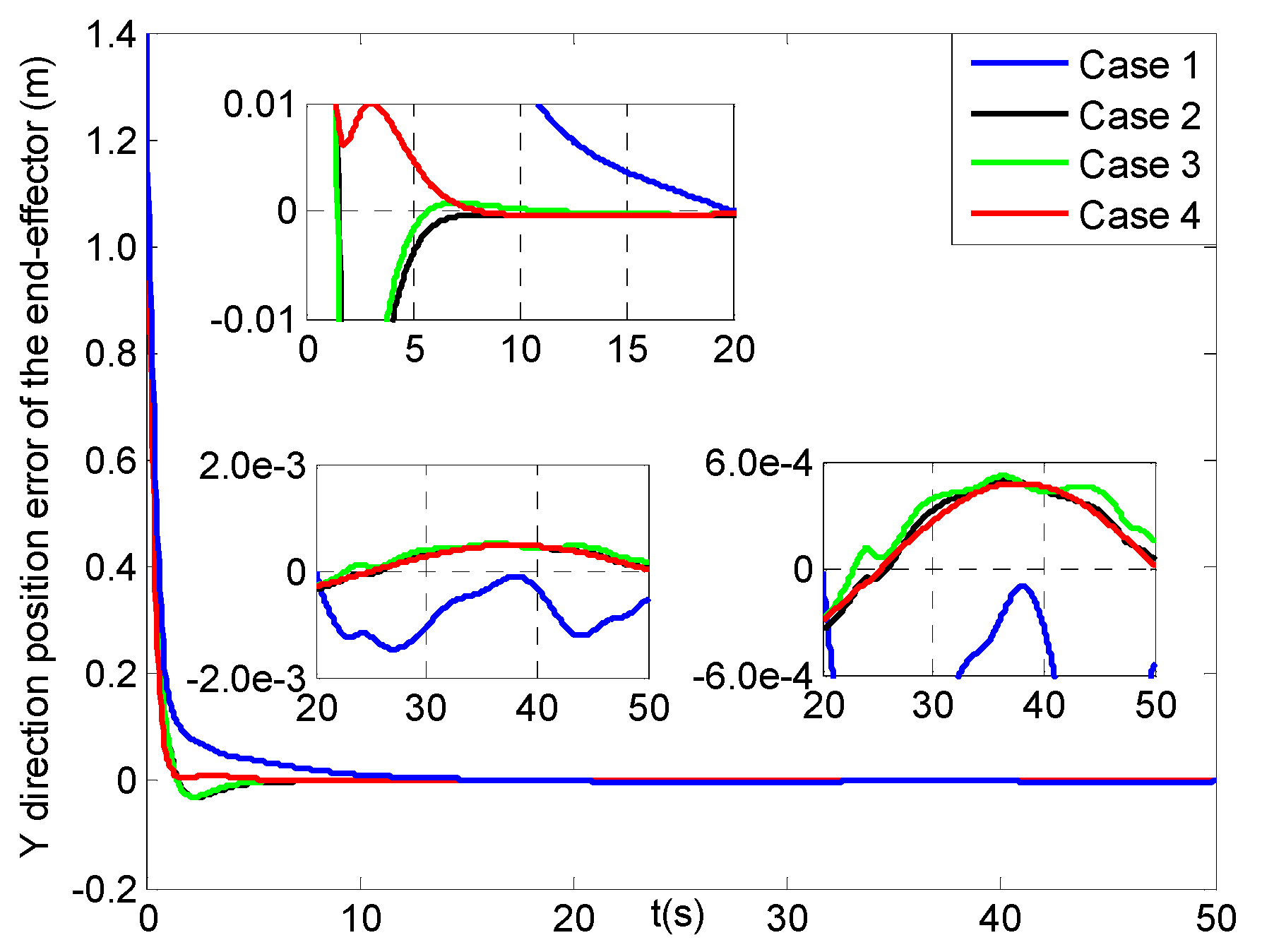
Figure 12, the position errors of the end-effector in X direction for cases 2–4 can reach [−0.01, 0.01] m at about 6 s, but after three seconds the result in case 1 starts to converge more slowly. Then,
Figure 13 shows that the Y direction position error of the end-effector in case 4 can arrive at [−0.01, 0.01] m within 1.5 s, and the slower is at 4 s in cases 2–3, and the slowest in case 1 till about 11 s.
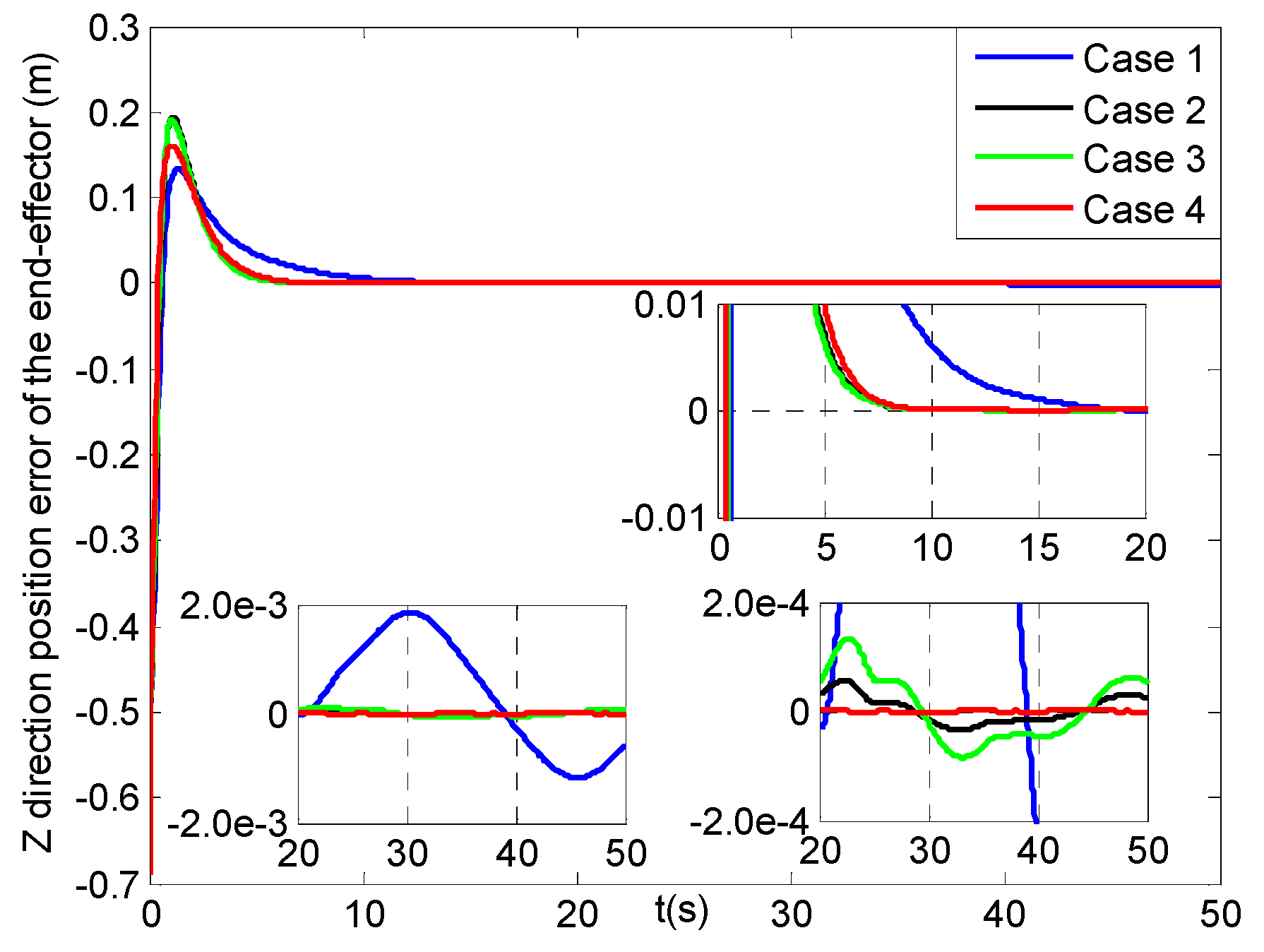
Figure 14 presents the position error of the end-effector in Z direction for cases 1–4, where those in cases 2–4 can reach [−0.01, 0.01] m at about 5 s and converge four seconds faster than that in case 1. Moreover, the three steady-state position errors of the end-effector in four cases can all obtain the range of [−0.002, 0.002] m, and the error values of case 4 change a little smoother than those in cases 2–3, and the roughest ones are in case 1.
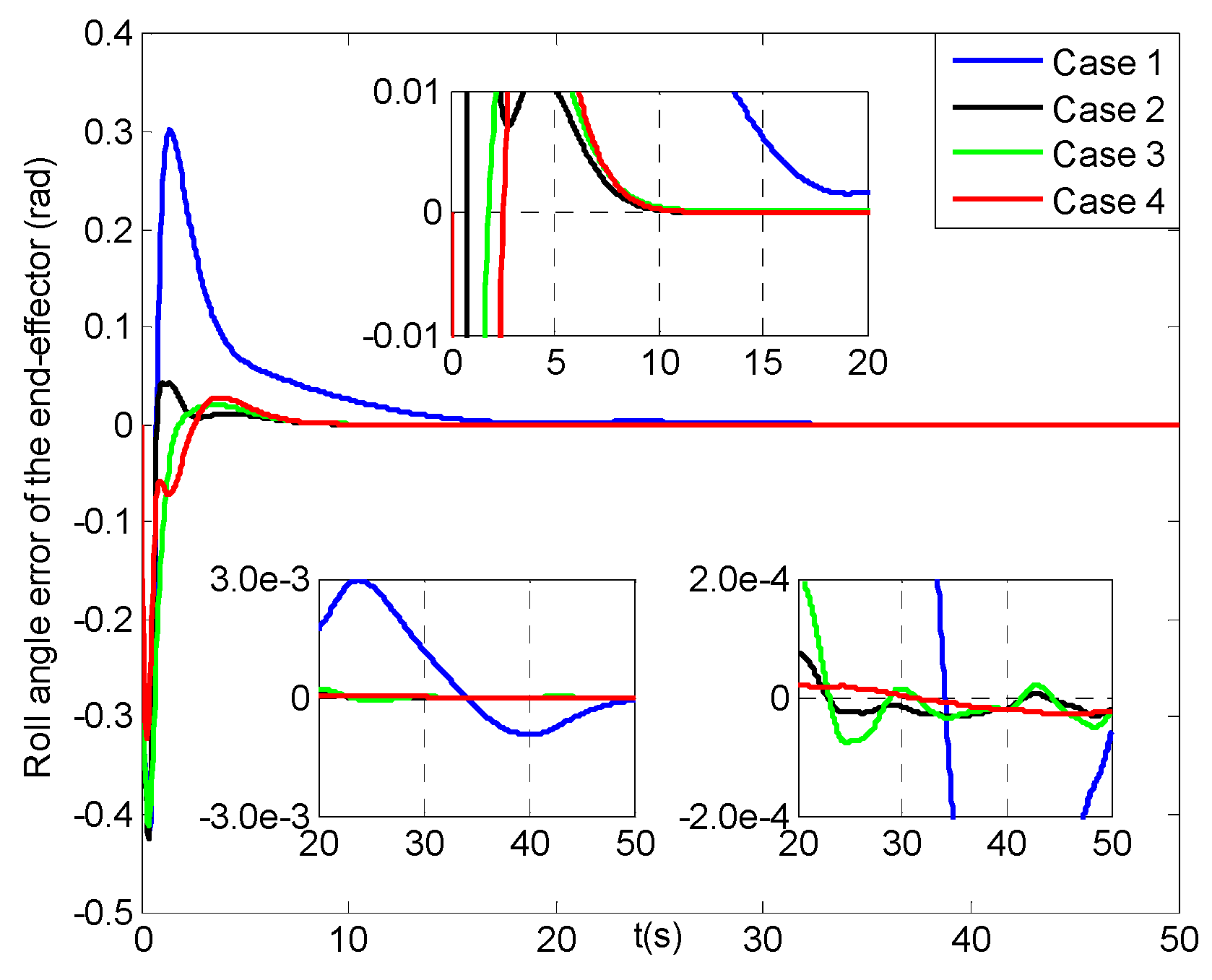
Figure 15,
Figure 16 and
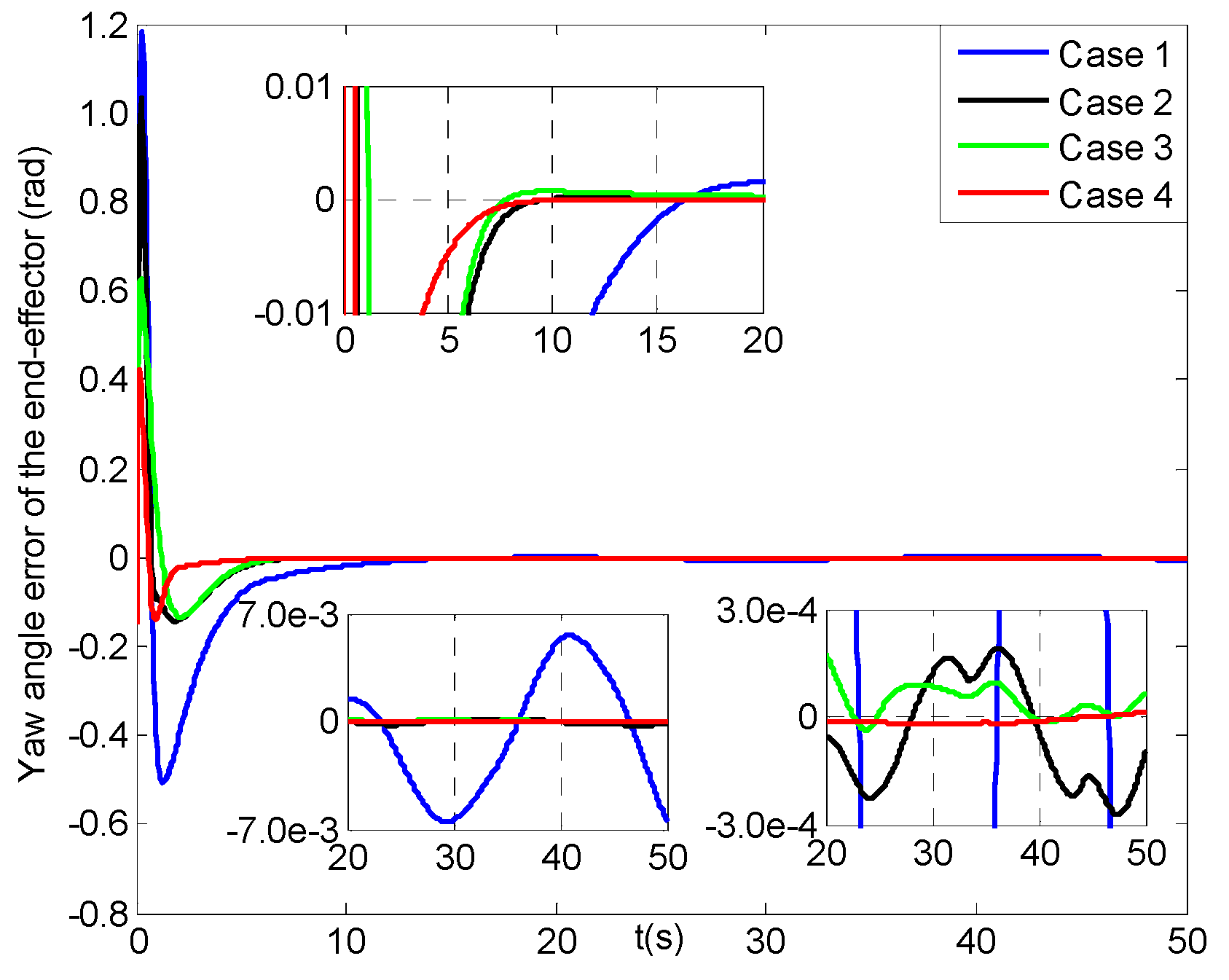
Figure 17 lay out the roll angle, pitch angle and yaw angle errors of the end-effector under four cases, respectively. Noted that the roll angle errors in cases 2–4 can attain [−0.01, 0.01] rad at about 6 s, while that in case 1 can reach till about 14 s. Though the pitch angle errors in case 1 can reach [−0.01, 0.01] rad with one second faster than those in cases 2–4, after then the latter values can realize faster convergence than that in case 1. Seen from
Figure 17, the yaw angle error in case 4 can get to [−0.01, 0.01] rad at less than 4 s, and has two seconds faster than those in cases 2–3, while the one in case 1 can reach the feasible range till about 12 s. Then the yaw angle error in case 1 tends to a slower convergence rate than those in other cases. Finally, all the three steady-state orientation angle errors of the end-effector can realize the range of [−0.007, 0.007] rad, where those in case 4 have much smoother changes than those in cases 1–3, and meanwhile those in case 1 range most largely. In addition, their average position and orientation angle errors of the end-effector are listed in
Table 5. It is evident that from 10 s to 50 s all of the average values for cases 2–4 are much smaller than those in case 1, especially, the last four average errors in case 4 are the smallest compared to other cases.
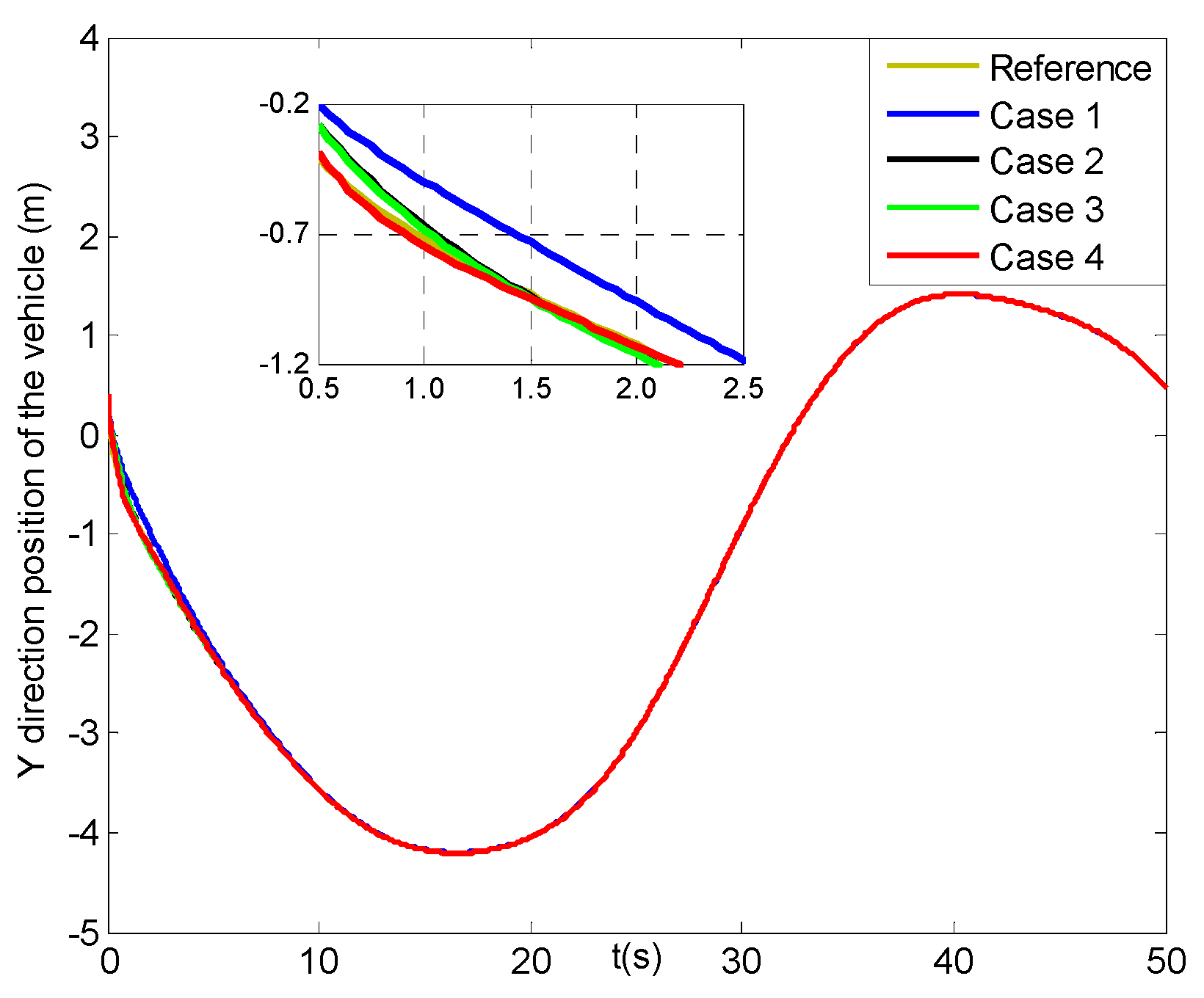
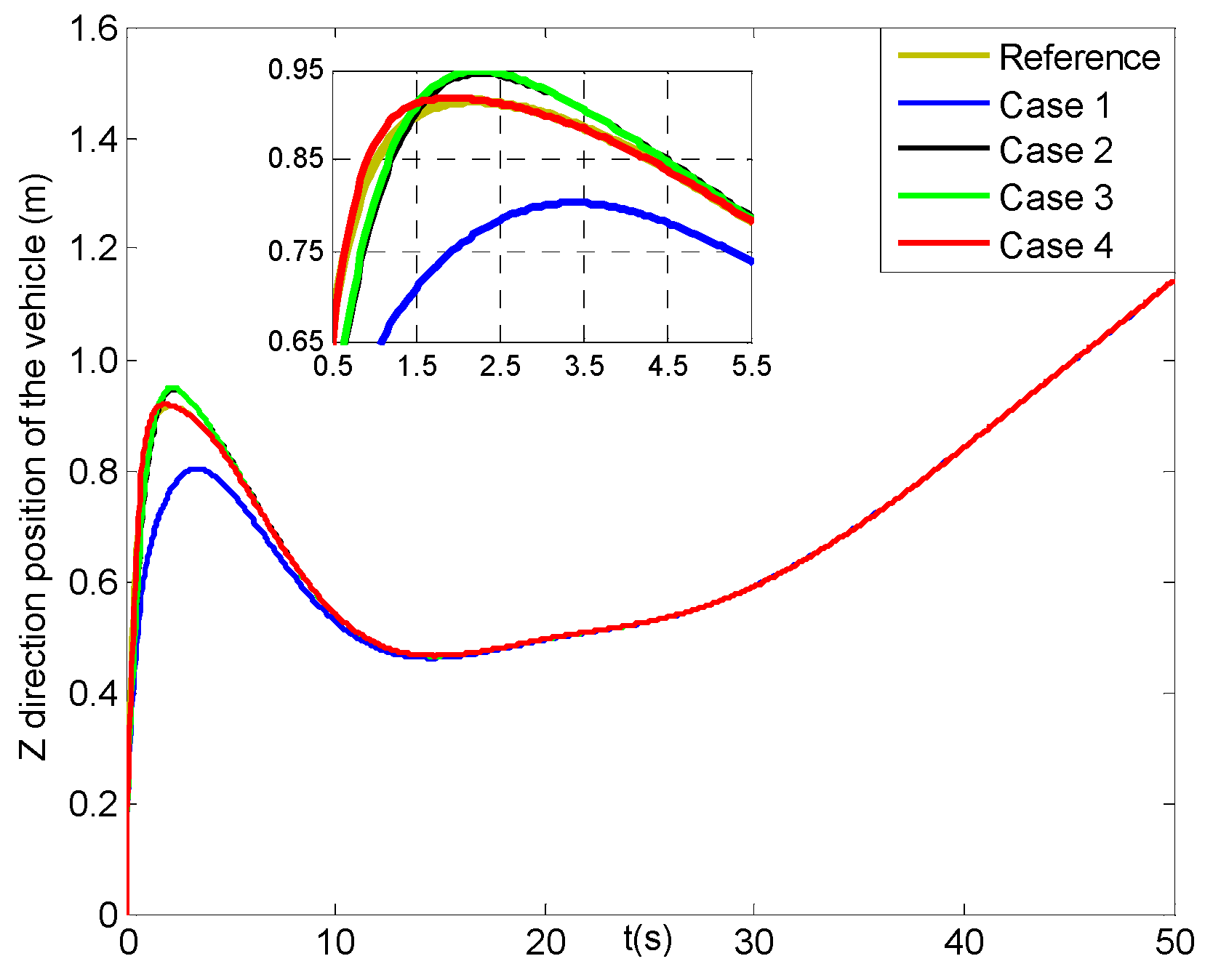
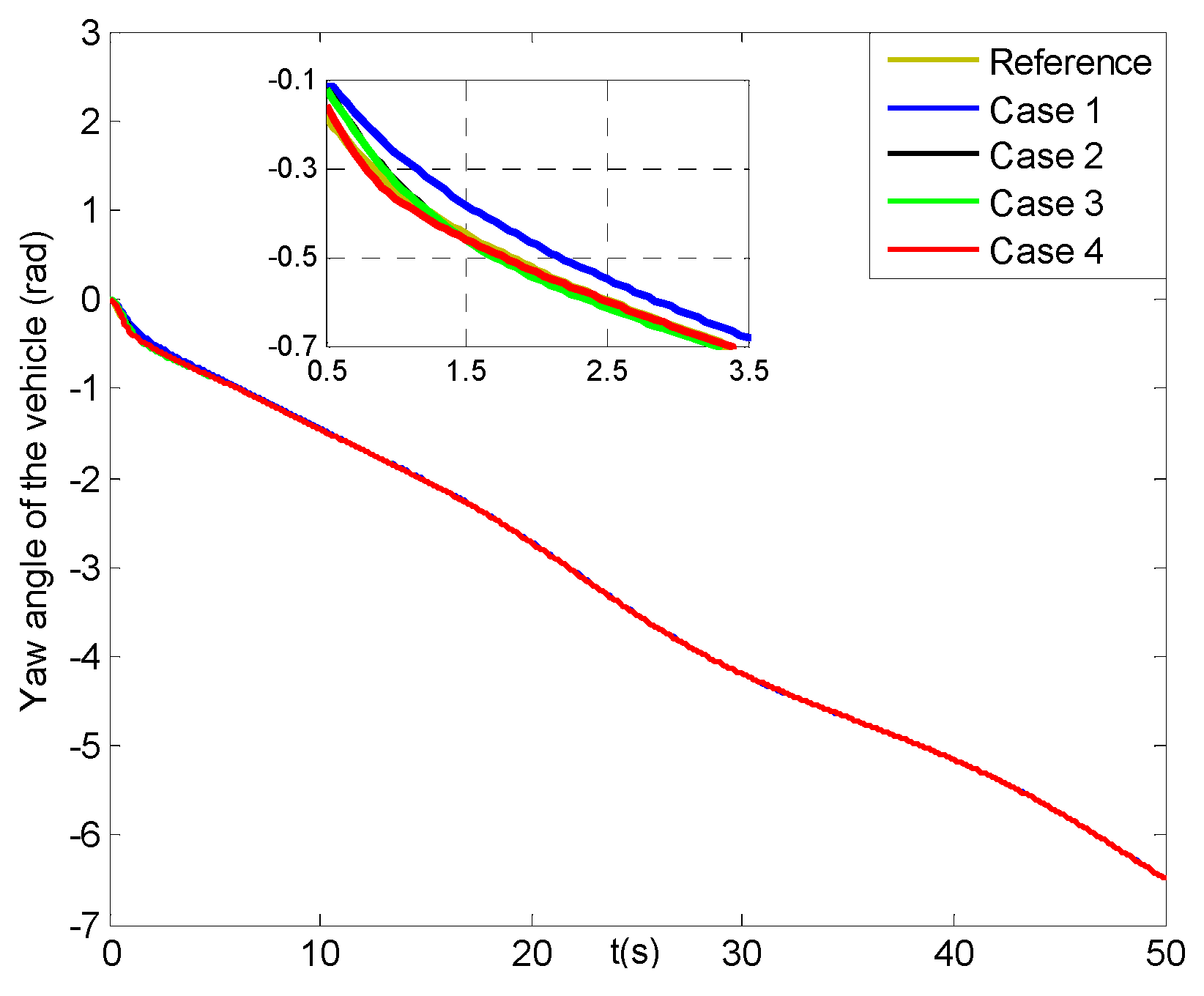
Figure 18,
Figure 19,
Figure 20 and
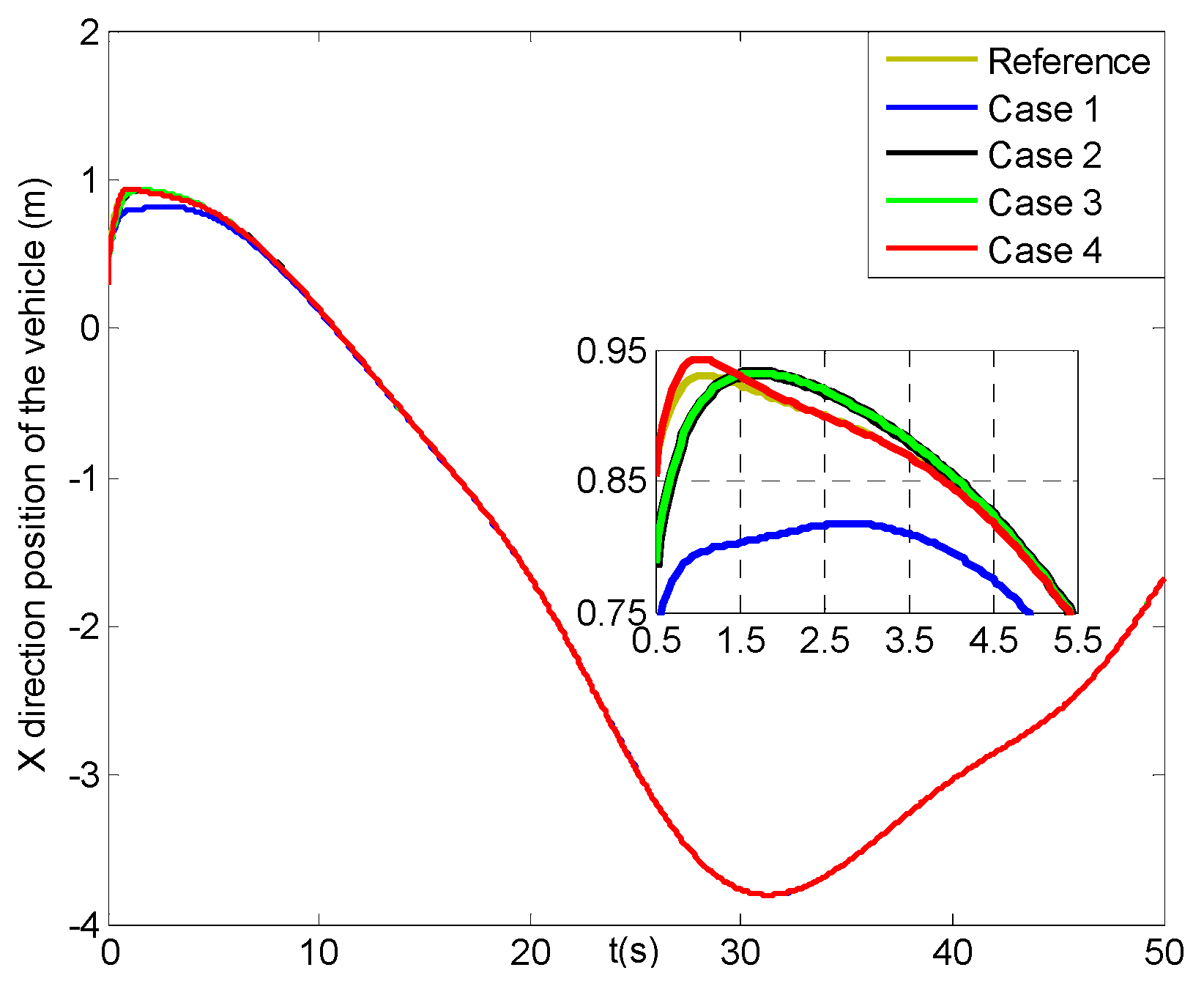
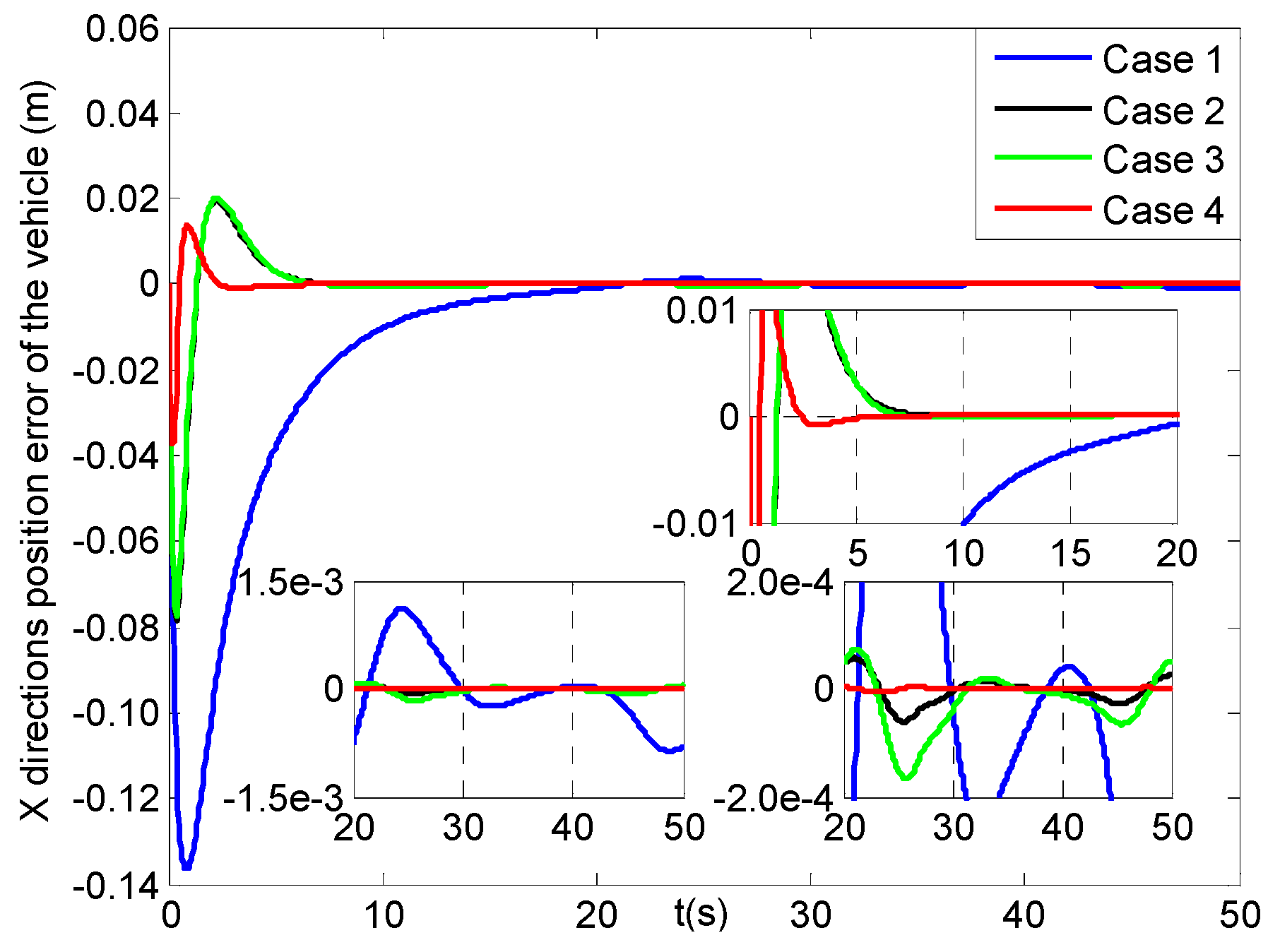
Figure 21 describe the tracking history for the three direction positions and yaw angle of the vehicle under four cases, in which all the actual values can reach the reference trajectories within about 10 s. Then, some results for the X, Y, Z direction position and yaw angle errors of the vehicle are given in
Figure 22,
Figure 23,
Figure 24 and
Figure 25. In
Figure 22, the X direction position error of the vehicle in case 4 can reach [−0.01, 0.01] m at about 1.5 s, which has two seconds faster than those in cases 2–3, while that in case 1 can achieve the range till about 10 s and then converge more slowly than the former three cases.
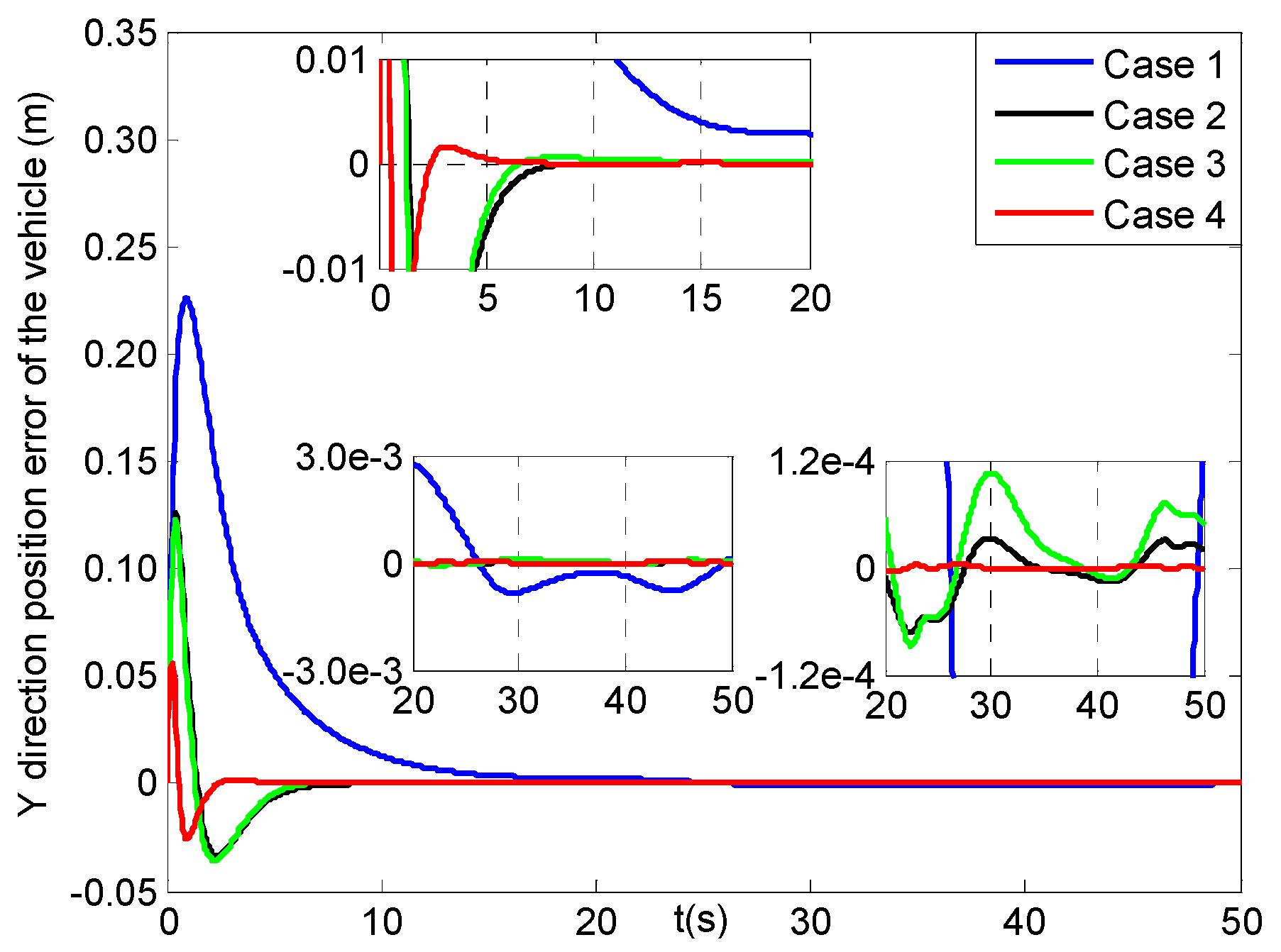
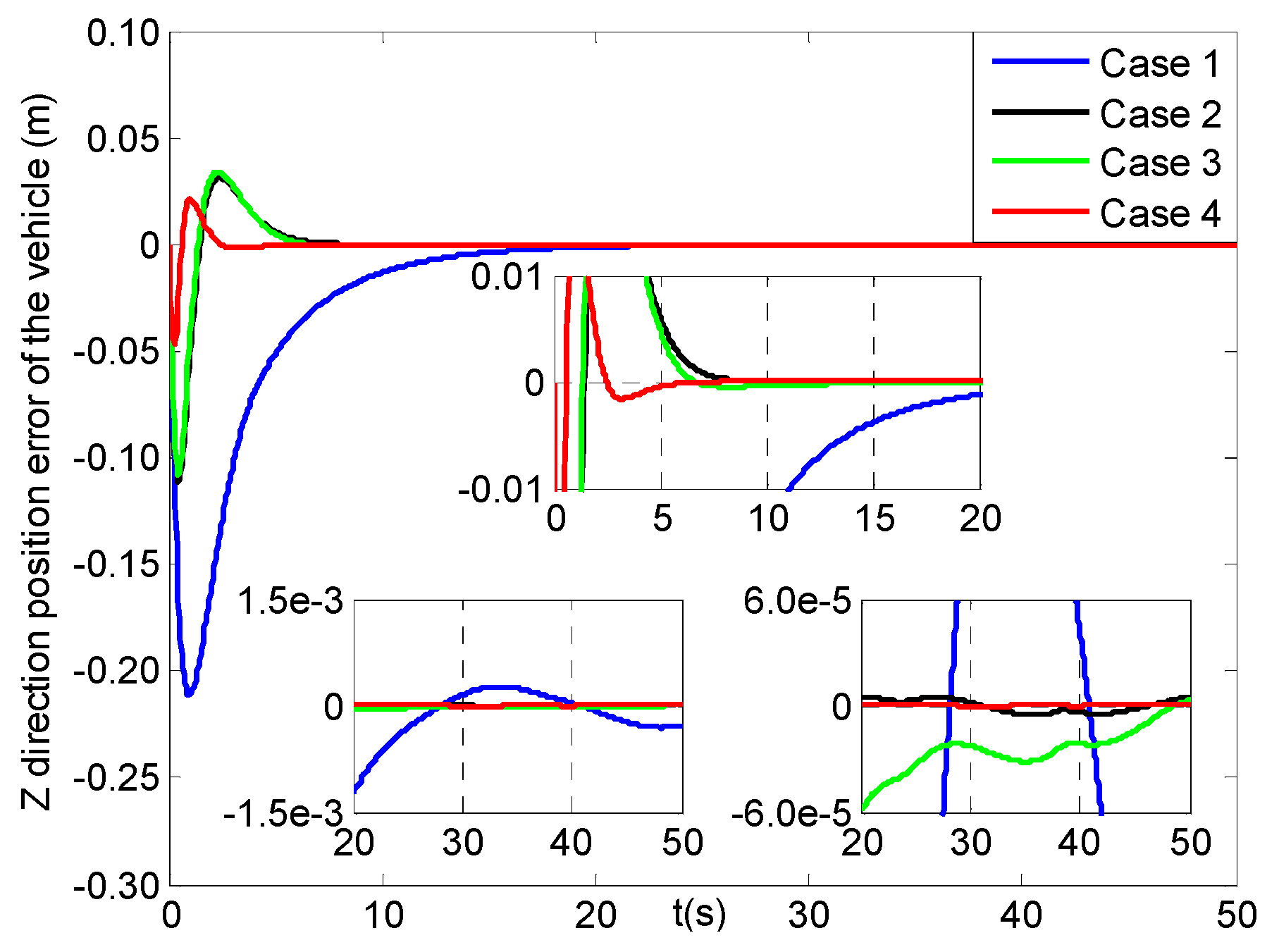
Figure 23 and
Figure 24 present the Y and Z direction position errors of the vehicle in cases 1–4, respectively. And, the two position errors in case 4 can all can arrive at [−0.01, 0.01] m within 1.5 s, and those in cases 2–3 can reach more slowly between 4 s and 5 s, and the slowest those in case 1 are till about 11 s. After that, all the three position errors of the vehicle in cases 2–4 have much faster convergent rates than those in case 1. From
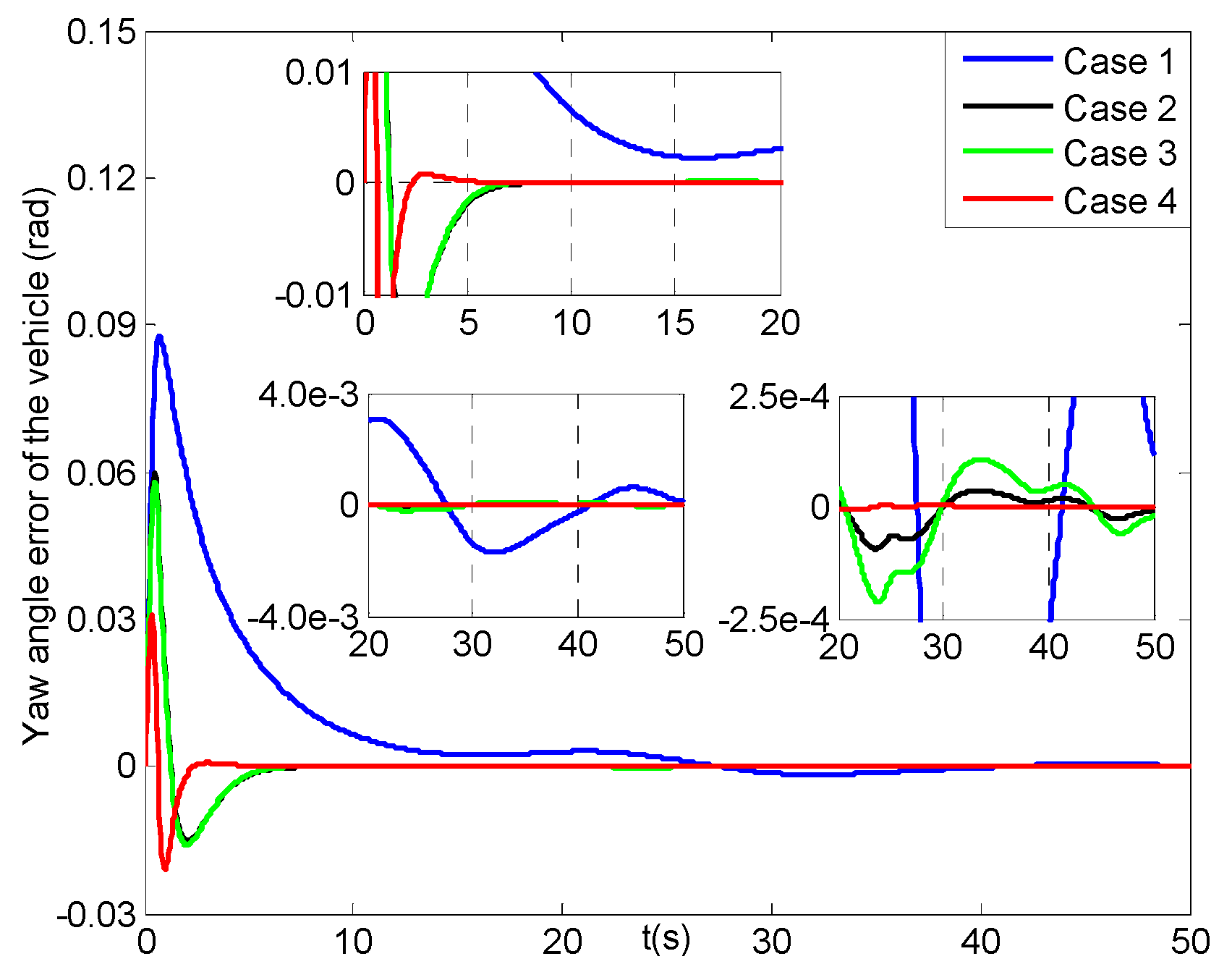
Figure 25, the yaw angle error of the vehicle in case 4 can get to [−0.01, 0.01] rad at about 1.5 s, and after less two seconds those in cases 2–3 can achieve, while that in case 1 can attain till about 8.5 s and then converge in a slower rate. Finally, the three direction position and yaw angle errors under four cases can achieve the steady-state ranges of [–0.003, 0.003] m and [–0.004, 0.004] rad, respectively. Moreover, all of the steady-state error values in case 4 have much smoother changes than those in other cases, and the roughest in case 1.
Besides, there are some velocity results for the three positions and yaw angle of the vehicle under four cases in
Figures S1–S8, shown in the
Supplementary Materials. From
Figures S1–S4, the three direction velocities and yaw angle velocities of the vehicle in cases 1–4 can reach the reference values at about 5 s. In
Figures S5–S7, the corresponding velocity errors in cases 1–4 can all get to [−0.01, 0.01] m/s within 7 s, while those in case 1 converge slower than other cases. In the final phase, their steady-state velocity errors in cases 2–4 can achieve the range of
m/s and those in case 1 are
m/s. Then, in
Figure S8 the yaw angle velocity errors of the vehicle for cases 1–4 can reach [−0.01, 0.01] rad/s within 4 s, and their steady-state errors can all arrive at
rad/s. In the
Supplementary Materials,
Figures S9–S14 and S21–S26 describe the six joint position and velocity trajectories of the manipulator for tracking the reference values in four cases, respectively. Seen from them, the actual joint position and velocity trajectories can all reach the reference ones within 15 s, and their corresponding tracking error results are shown in
Figures S15–S20 and S27–S32 of the Supplementary Materials. Among, it can be obtained from
Figures S15–S20 that all of the six joint position errors can arrive at the range of [−0.01, 0.01] rad at about 13 s, and their steady-state errors in cases 2–4 can arrive at
rad and those in case 1 are [–0.008, 0.008] rad. In
Figures S27–S32 all of the six joint velocity errors for cases 1–4 can get to [−0.01, 0.01] rad/s within 9 s, and their steady-state errors in cases 1–4 can all achieve the range of [–0.003, 0.003] rad/s. Especially, all of the results in case 4 show the smoothest changes than those in other cases, and the roughest are in case 1.
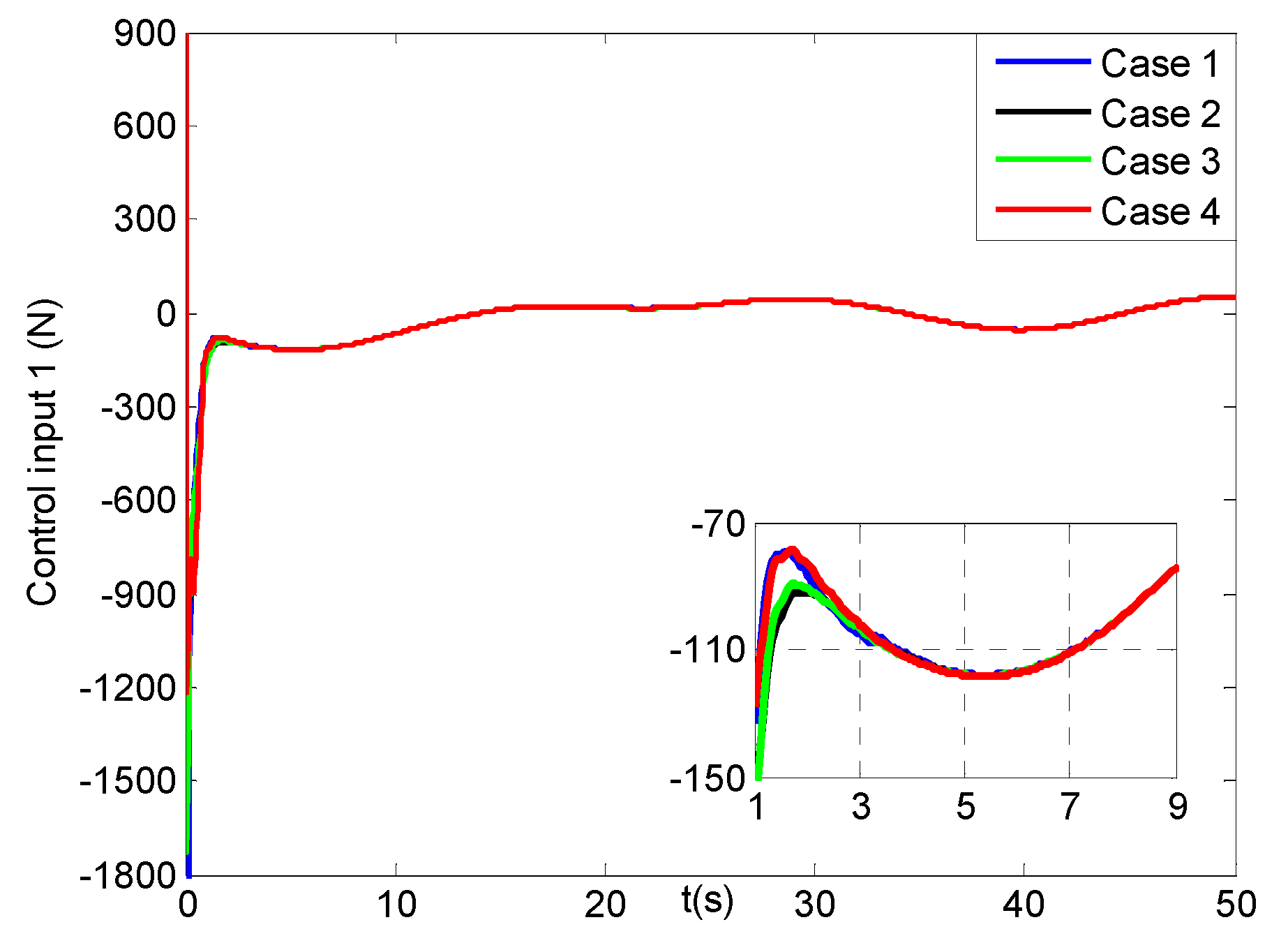
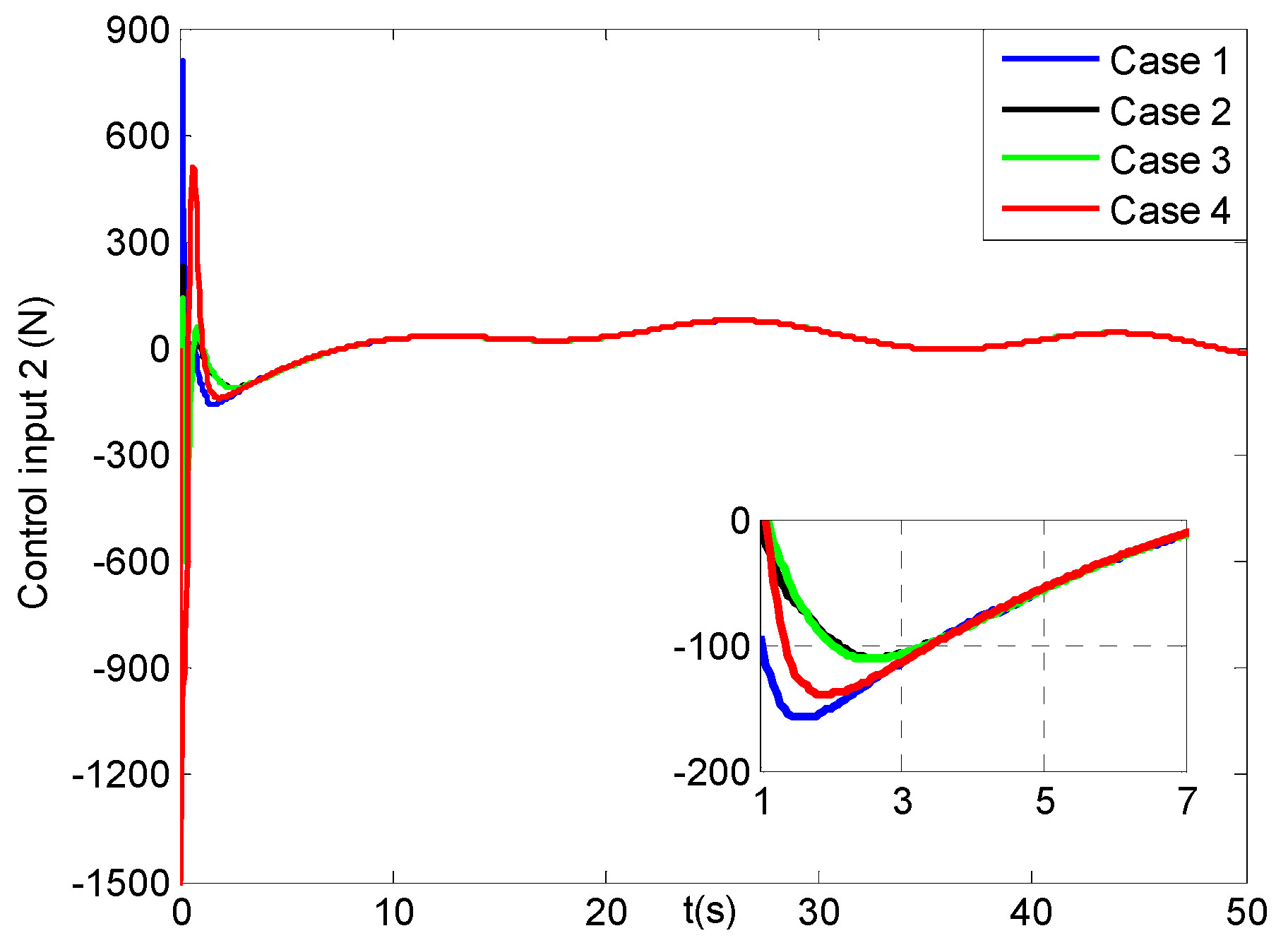
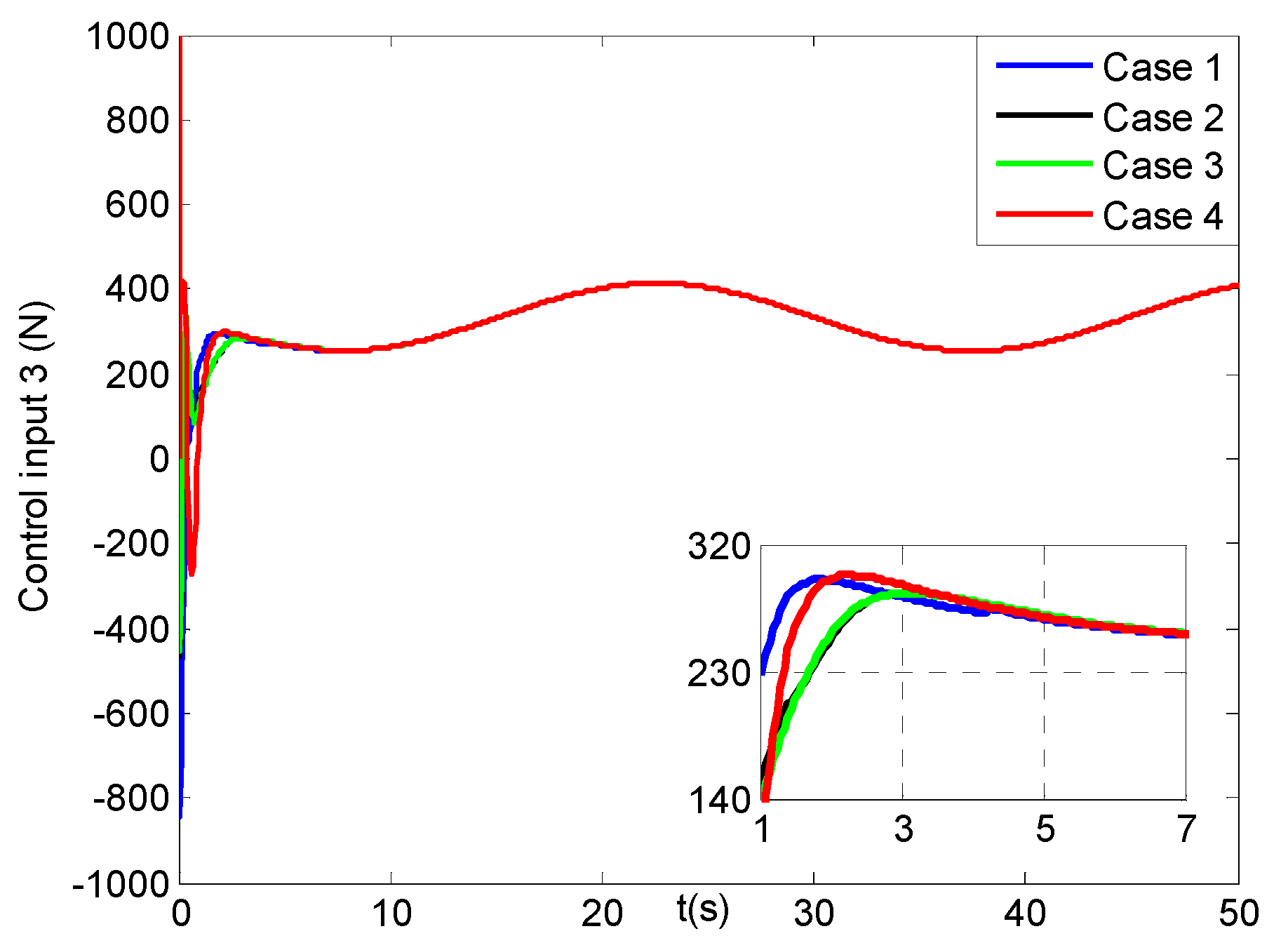
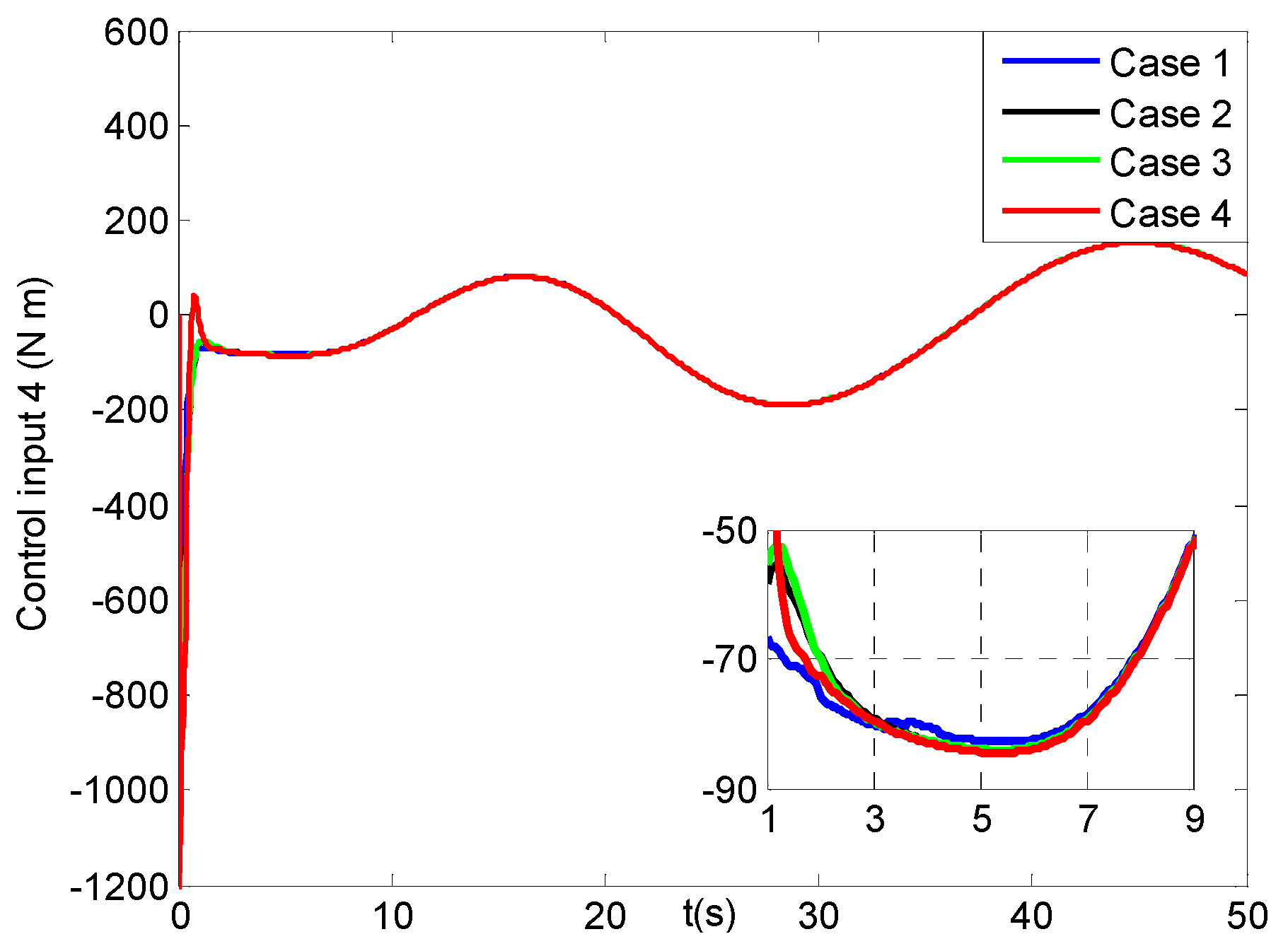
Figure 26,
Figure 27,
Figure 28 and
Figure 29 describe the X, Y, Z direction forces and yaw angle moments of the vehicle in four cases, respectively. Seen that in the beginning all of the forces and moments change largely, and after five seconds they turn to smooth trends. In addition, the related six joint moments of the manipulator are shown in
Figures S33–S38 of the Supplementary Materials. Then, the average force and moment values of the UVMS is listed in
Table 6, where the average force and moment values have less 0.1 N and 0.4 N m differences among the four cases, respectively. That means that after about 10 s, their energy consumptions for cases 1–4 approach to the same levels, which is consist with the results in
Figures S33–S38. Combining the above analysis for the tracking errors of the UVMS, we can obtain that the proposed control system in case 4 can have faster convergence and higher precision tracking performance compared to other three cases.
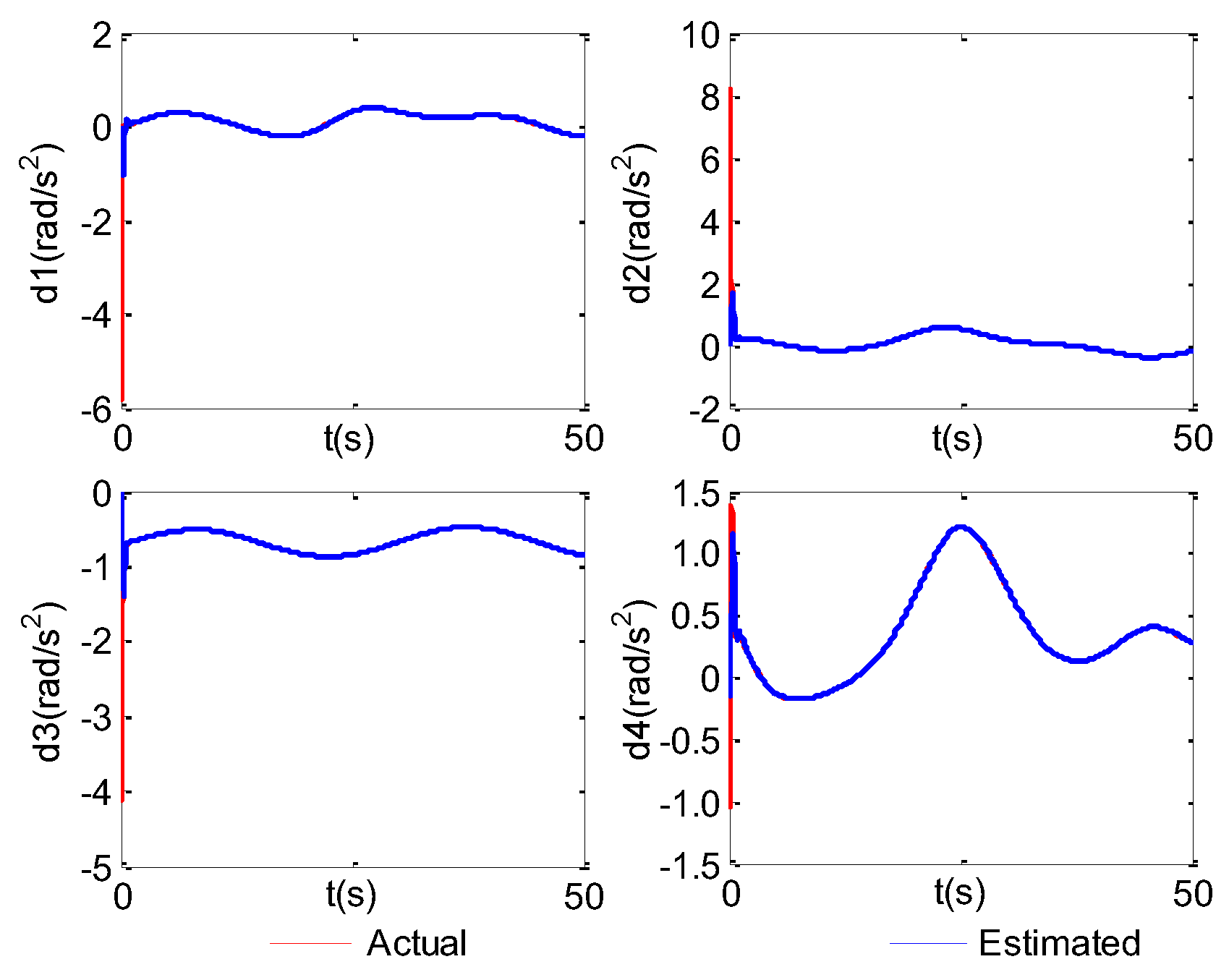
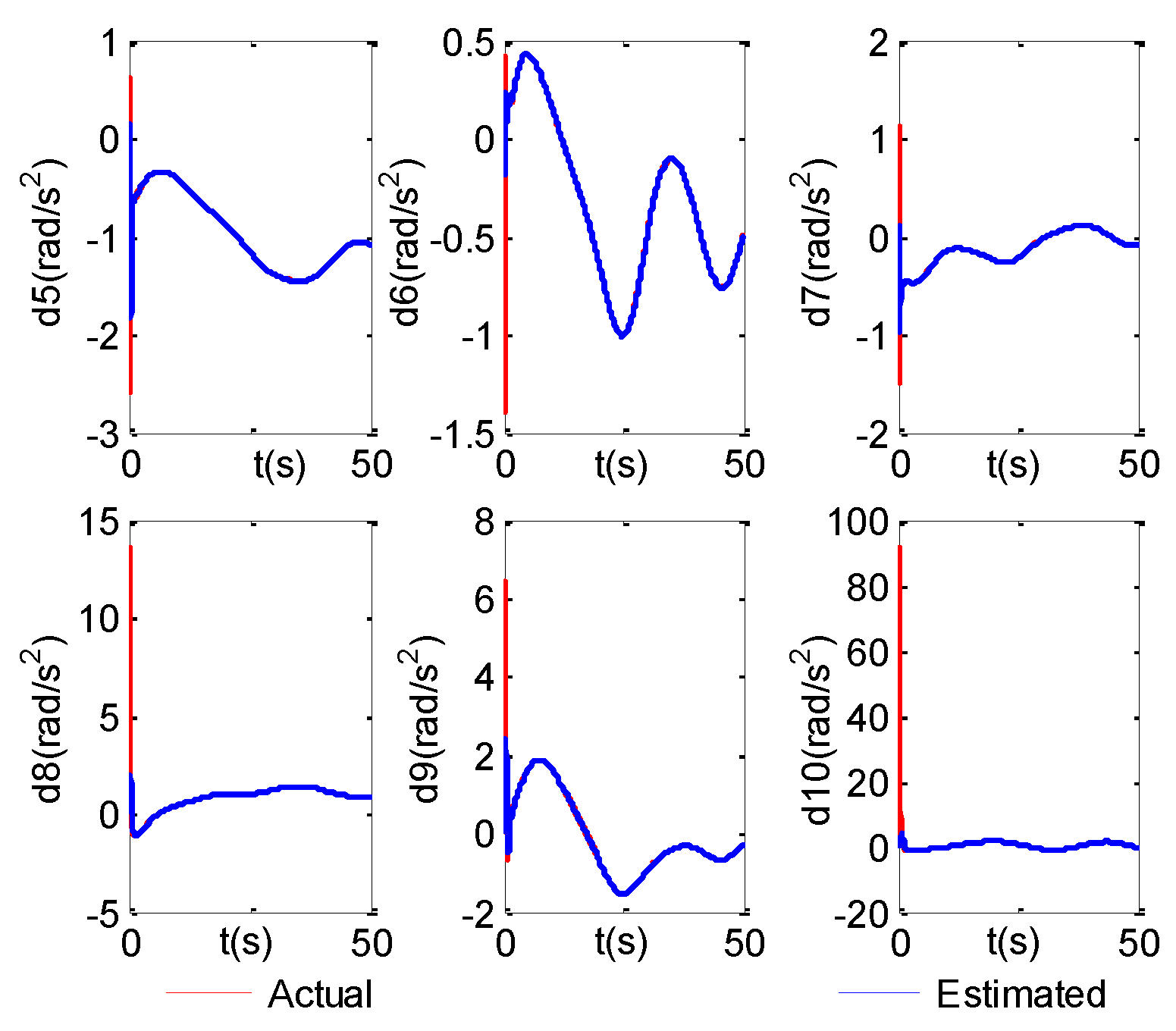
Figure 30 and
Figure 31 represent the components and their estimations of the lumped disturbance vector for the UVMS in case 4, respectively. Some related results in other three cases are shown in
Figures S39–S44 of the Supplementary Materials. Despite that in the initial time there exist big differences between the lumped disturbance vectors and their estimations for cases 1–4, after several seconds the disturbance estimations in four cases can all achieve much better approximation to the lumped disturbances. The reason is that the ESO is applied to attenuate the effects of the complex lumped disturbances on the control systems. Furthermore, the average disturbance estimation errors under four cases from 10 s to 50 s are listed in
Table 7. Noted that their average values are small and have few differences among four cases. Since the tracking errors in case 4 show much smoother variation compared to those in other cases, it demonstrates that the proposed control method has stronger robustness of resisting disturbances.
In conclusion, the simulation comparative results validate that the proposed controller can achieve the better tracking performance and stronger robustness of disturbance rejection.



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}