1. Introduction
The increase of the scale of modern ships and marine structures means their structure stiffness tends to become smaller. Therefore, the reduction of the natural frequency of the vertical vibration of ship and offshore structure makes the hydroelastic responses such as Spring and Whipping more likely to occur. Thus, the influence of hydroelastic response must be considered. In recent years, some major accidents have occurred due to the failure of the structure linked to the hydroelastic effect. For example, two serious accidents occurred on large container ships, MSC NAPOLI in 2007, and MOL COMFORT in 2013, as shown in
Figure 1. It was reported that both vessels were broken due to the large hogging of the hull structure.
The experiment methods considered as an irreplaceable way to study the physics of hydroelasticity and to validate different numerical models. Jiao [
1] made a detailed review on the experimental study of ship hydroelasticity. The segmented ship model experiment has become the main method to study the ship hydroelasticity [
2,
3,
4].
On the other hand, the rapid development of different numerical models has made numerical simulation, which has the advantages of relatively low cost and easy for systematically parameter studies, as equally important as experimental approaches. The theory of ship hydroelasticity has seen a process from potential flow to viscous flow, from two-dimensional (2D) to three-dimensional (3D), and from linear to nonlinear [
5]. The 2D hydroelasticity theory consists of 2D strip theory for the fluid dynamics and mode superposition method for structure dynamics [
6,
7,
8]. The work by Bishop and Price [
9] is one of the milestones of the 2D hydroelasticity theory. Wu [
10] pioneered the 3D linear hydroelasticity theory, which can be used to solve arbitrary variable bodies in waves. Price [
11] modified this theory so that the viscous resistance of fluid could be taken into account in the calculation. Based on the original 2D and 3D linear hydroelasticity theory, many scholars proposed 2D and 3D nonlinear hydroelasticity theories by considering a series of nonlinear factors. Some typical works include Yamamoto’s nonlinear 2D strip model [
12] and the systematic works of Wu [
13,
14,
15] that combines linear model and impulse type theory for high-speed ships. There are also many works on Boundary Element Method (BEM) based models for hydroelasticity problems [
16,
17,
18].
The abovementioned potential flow-based theories have been widely used for hydroelasticity computations, but the basic assumptions of the theory make it difficult to directly simulate the non-linear factors such as wave breaking or large body motions. On the other hand, the CFD (Computational Fluid Dynamics) technology, which is based on solving RANS (Reynolds-Averaged Navier-Stokes) equation, can easily take all these non-linear factors into account. By further coupling it with Finite Element Method, the CFD-FEM method such as the work by Lakshmynarayanana [
19] can theoretically capture all the non-linear factors in the fluid and structure interaction process. According to whether the structure deformation feedback is taken into account for flow computation, the fluid structure interaction problem is divided into one-way and two-way coupling. Dhavalikar [
20] compared the results calculated by one-way coupling with experimental results and found the results are larger than the experimental results, Paik [
21] calculated the hydroelasticity of container ships by two methods and found that the results of two-way coupling calculation were closer to the experimental results. These works all indicate the necessity of two-way coupling, i.e., taking the structure deformation into account for hydroelasticity computation.
In the last few decades, many scholars have studied the nonlinearity of ships’ vertical motions and the wave load. Paik [
21] made a detailed review of this. Watanabe’s experiments show that the ship’s flare shape has influence on the vertical bending moment peak and pitch motion [
22]. Fonseca and Soares also demonstrated by model experiments that the nonlinearity of wave loads is much more significant than that of motion due to the geometry with a large flare at the bow [
23]. Some scholars have studied the effects of wave nonlinearity and speed on hydroelastic response. Lakshmynarayanana [
19] studied the influence of wave steepness on the structural response of barges under the condition of no speed. Then, Lakshmynarayanana [
24] calculated the effect of wave steepness on the structural response of ships with speed at different encounter frequencies. Tian studied the effect of ship speed on the hydroelastic calculation of wave loads on large bulk carriers [
25]. Ni studied the effects of wave nonlinearity and speed on the hydroelastic response of large bulk carriers [
26]. Yang [
27] used a 3D nonlinear hydroelastic method in the time domain to study the nonlinear springing and whipping of a 6750 TEU container ship. Jiao [
28] analyzed the hydroelastic response and slamming loads of ships in real waves by large-scale model measurement. From the literature, we found that most of the previous scholars only studied the influence of ship speed and wave nonlinearity on the hydroelastic response, respectively. As an important factor for ship and wave interaction, the wave length–ship length ratio can potentially have a significant influence on the hydroelasticity response, which has not thoroughly investigated in the literature. In this paper, the two-way coupling CFD-FEM method is used to calculate the hydroelastic response of a container ship under the combined influences of various factors, including wave length–ship length ratio, forward speed, and wave steepness.
The following sections are arranged as follows: the basics of the numerical models used in this study is briefly stated and validated in
Section 2 and
Section 3, respectively. Then, in
Section 4, the hydroelastic responses with and without forward speed are investigated in more details; and finally, the conclusion is drawn in
Section 5.
3. Numerical Model Validation
The results of the hydroelastic model test of the 6750-TEU container ship in KRISO Institute are used to verify the numerical calculation results in this paper. The experimental model of container ship is made by elastic beam and segmented hull. Kim has given a very detailed introduction to the information of the model experiment [
3,
27]. The three-dimensional geometric model of 6750-TEU container ship is shown in
Figure 5. The body plan of the 6750-TEU containership can be found in reference [
3,
27]. The principal dimensions of the 6750-TEU containership are shown in
Table 1.
The numerical model used in this paper has been validated against experimental results [
3] in our previous work [
40]. For the sake of simplicity, only a brief review of the comparison between numerical and experimental results is given in this section.
The rigid body responses such as heave, pitch and hydroelastic response, i.e., vertical bending moment at
Section 4 (VBM4) near the amidship are compared. The results under one of the typical non-linear wave conditions, which is called NL1, is shown in
Table 2 (H is the wave height, λ is the wave length, β is the heading angle).
In order to check the grid convergence performance, three sets of meshes, which are shown in
Table 3, are generated for the same condition mentioned above.
As shown in
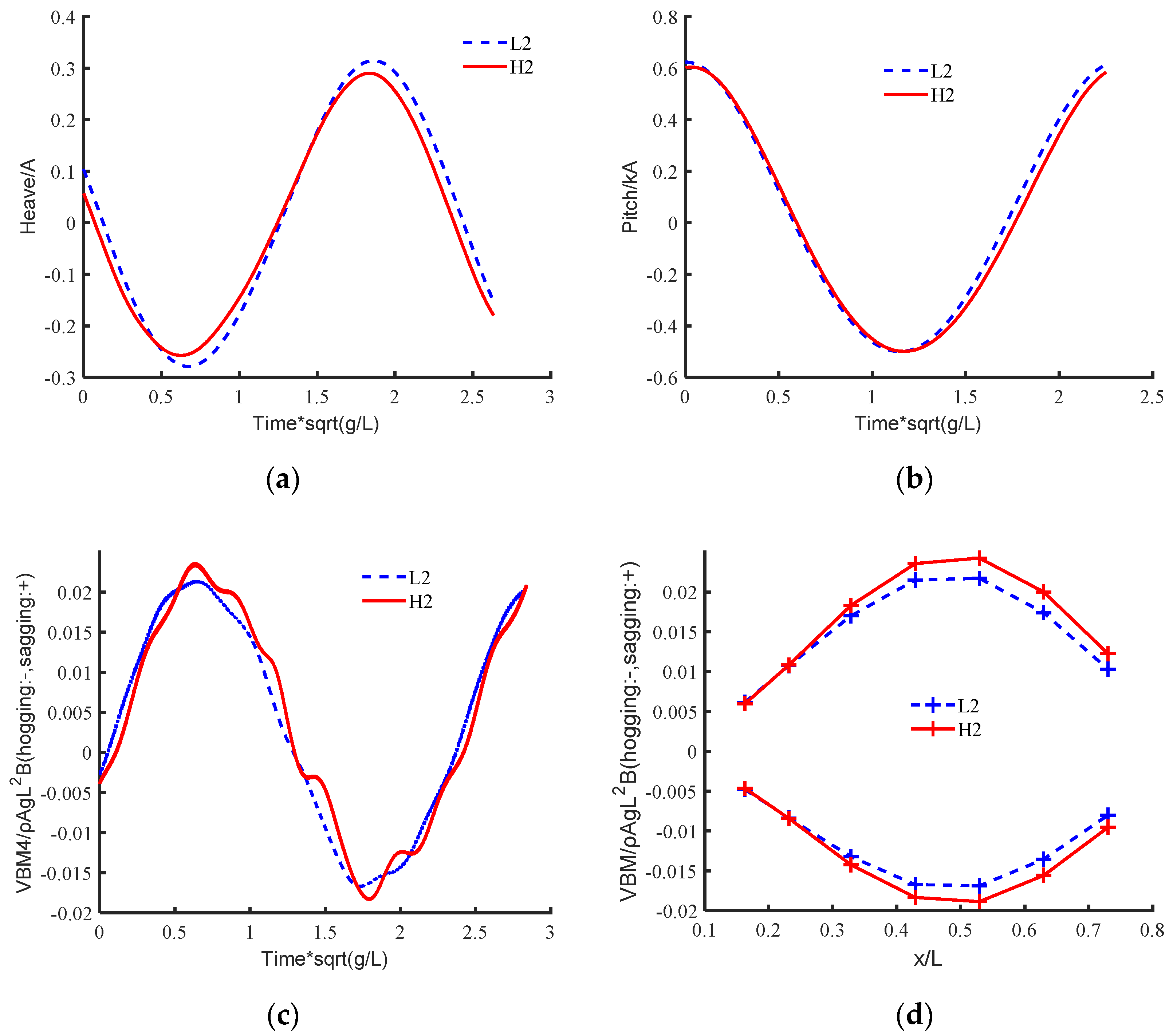
Figure 6, the results from three sets of meshes are very close to each other, which shows good mesh convergence property of the numerical model. The type b (4.6 million mesh) is selected in this paper considering the accuracy and efficiency of calculation. Moreover, the results marked by “Max”, “Min”, and “Mean” (which means maximum, minimum, and mean values, respectively) are obtained by analyzing several different types of numerical methods (most of them are potential flow based methods) as reported in Kim’s article [
3]. “Exp” represents the experimental value. It is worth noting that the various numerical models mentioned in ref [
3] show a large variation between different models (most of which are potential flow based methods), which deviate from the experimental values by a relatively large amount. The current CFD-FEM coupled model shows a comparable level of accuracy as the “mean” value of the other numerical models (compared with experimental values). In terms of the most concerned hydroleasticity results, i.e., vertical bending moment time series at midship (
Figure 6c) and spatical distribution along the ship length (
Figure 6d), the current CFD-FEM results show better accuracy. More specifically, compared with experimental results, the maximum relative error of the VBM4 time series by the current CFD-FEM model is about 2.5% (type b grid), whereas the mean value of other models in ref [
3] is about 4.3%. For the vertical bending moment spatical distribution, the current model shows maximum 5% difference with experimental values, whereas the maximum relative error of mean value of other models in ref is more than 10%.
It is clear that the current numerical model match very well with experimental results and close to the mean value of the results from other numerical models. This confirms the accuracy and reliability of the current numerical model.
5. Conclusions
In this paper, the coupled CFD-FEM computational method is used for the ship hydroelastic response simulation. The numerical method is firstly validated against the model test results reported in the literature [
3]. Then, the hydroelastic response of the model without and with forward speed are calculated, respectively.
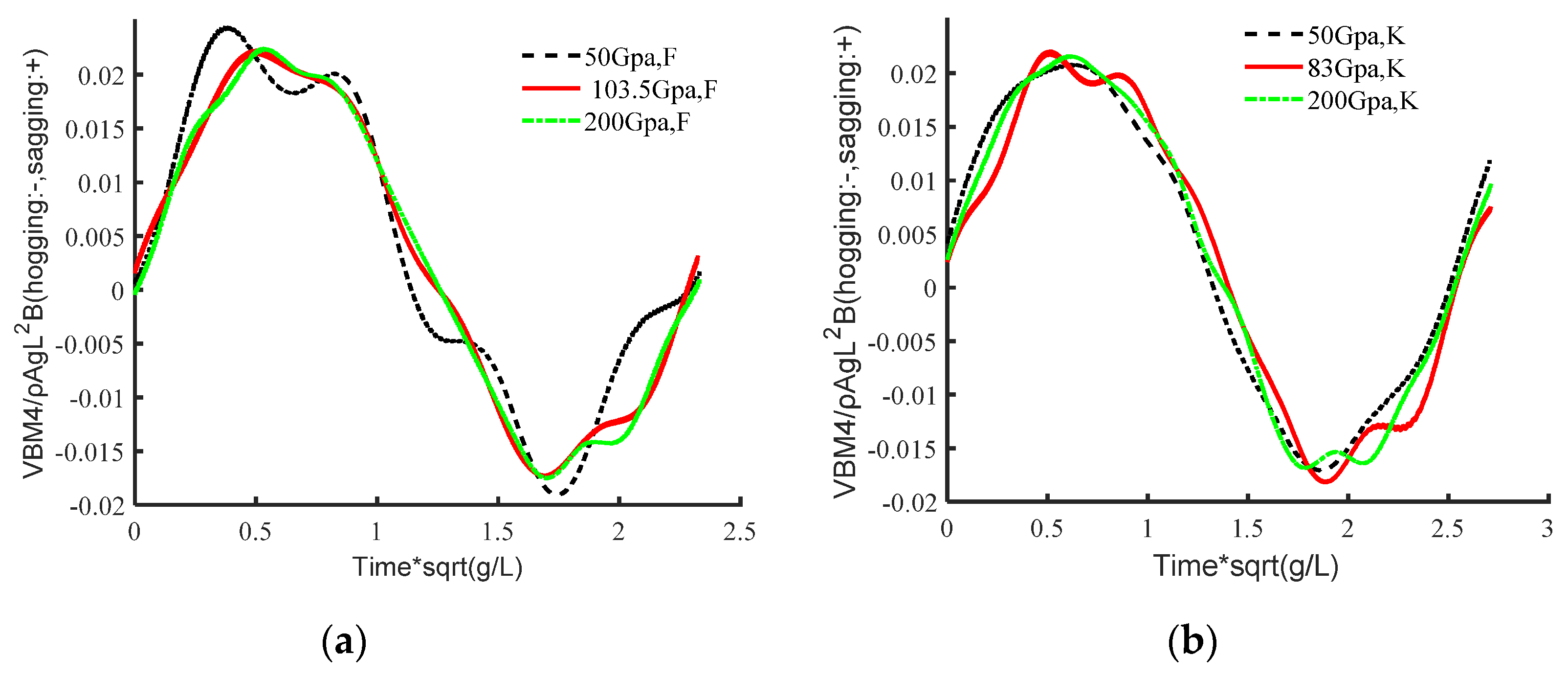
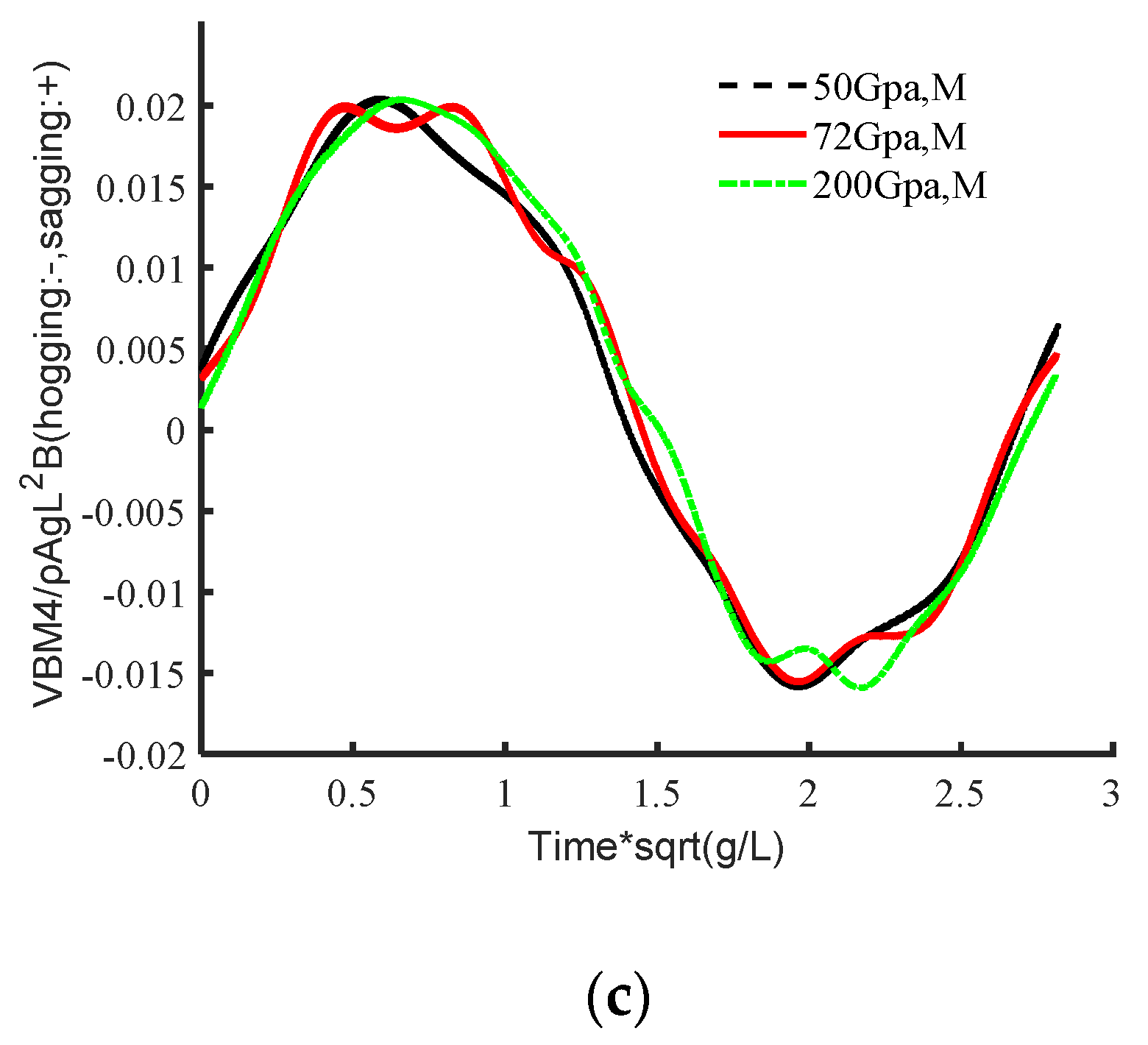
For the cases without forward speed, the wave length–ship length ratio has a considerable influence on the hydroelastic responses. For the cases where λ/L is smaller than 1 (0.857 in this case), the non-dimensional vertical bending moments under low structure stiffness (E = 50 GPa in this case) show strong non-linearity instead of the resonance or high rigidity conditions. For the cases where λ/L is equal or larger than 1 (1.07 and 1.228 in this case), the non-dimensional vertical bending moments show no significant difference with different wave frequency-structure natural frequency ratios. The wave non-linearity, i.e., wave steepness, also shows more significant influence under low structure stiffness and λ/L < 1 condition (0.857 in this case).
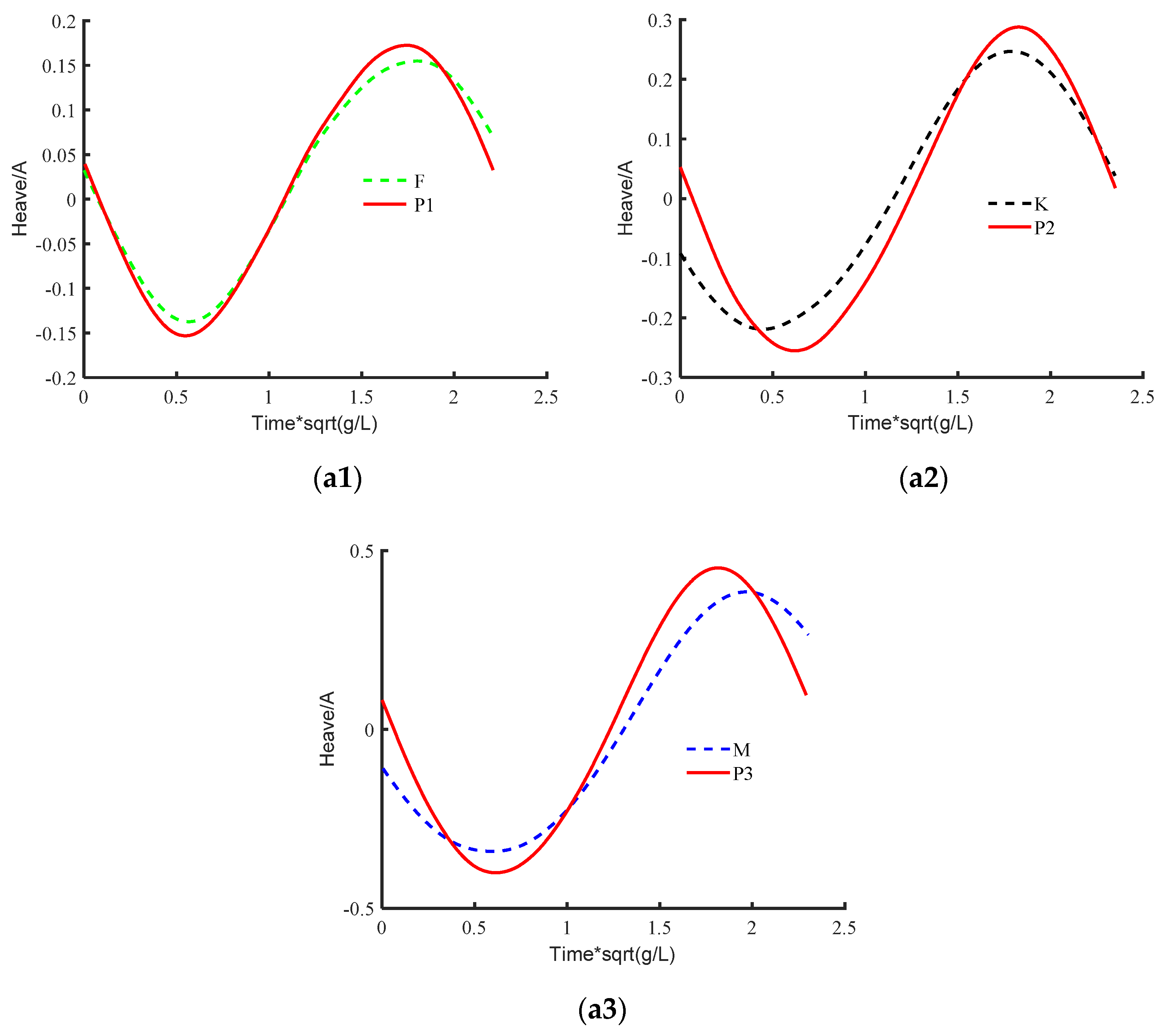
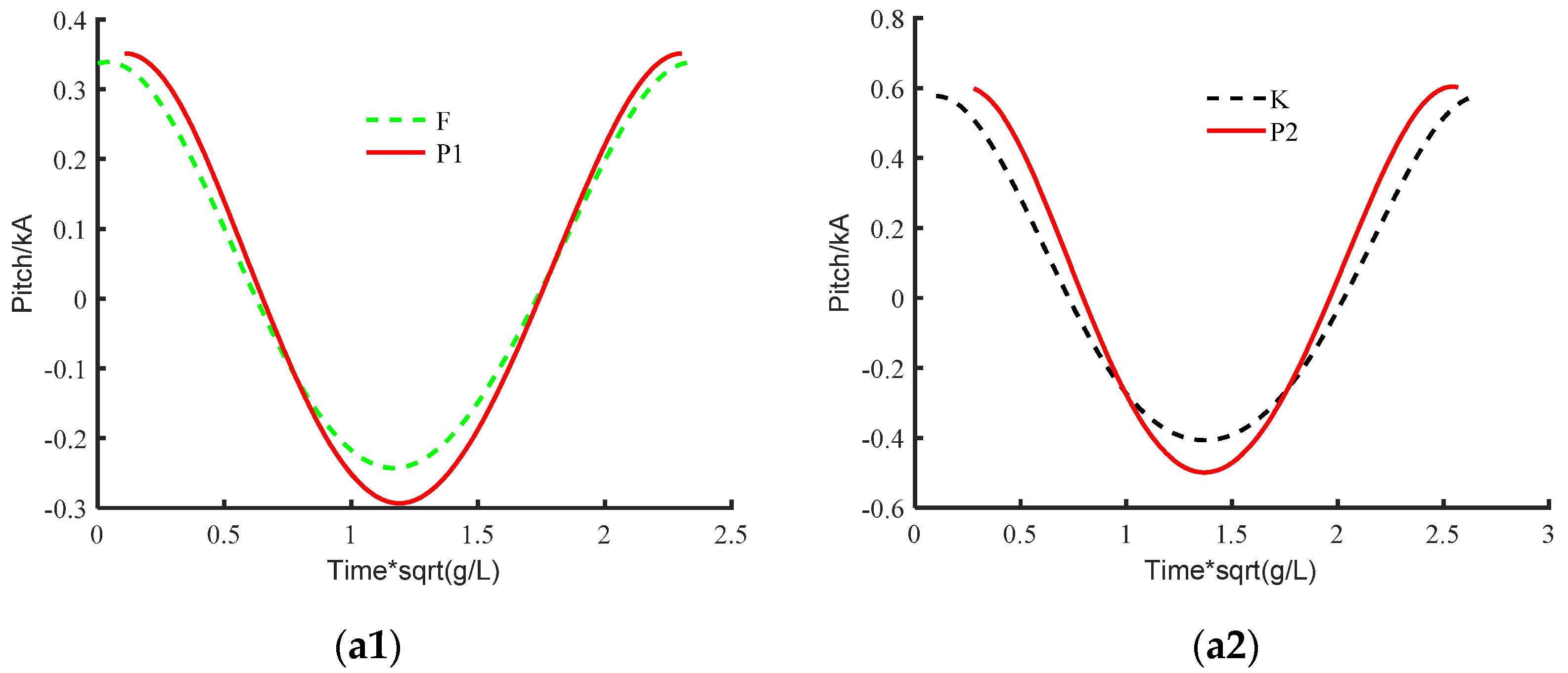
For the cases with forward speed, the non-dimensional rigid body motions (heave and pitch) will be considerably increased by forward speed under the same wave conditions, but the non-dimensional vertical bending moments are not correspondingly affected by the larger rigid body motion. The non-linearity of waves, i.e., wave steepness, will have a more significant influence on hydroelastic response under the conditions when λ/L is smaller or close to 1 (0.857 and 1.07 in this case).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}