3. System Modeling
In ships, waste heat is generated from the main engines, generators, and various auxiliary machinery. To discharge such waste heat to the outside of the system, a central temperature cooling water system is used. In the shipbuilding stage, the heat load generated by the ship is calculated in advance, followed by the central cooler capacity, cooling water pump capacity, and seawater pump capacity. Accordingly, a piping system is constructed.
Figure 3 demonstrates an example of the heat balance of a model ship.
Here, Q, H, and T denote the flow rate, quantity of heat, and temperature, respectively. The heat load is depicted considering that the main engine is operated under full load with two generators being operated.
The remarkable loads are “M/E load, M/E H.T J.W. cooler”, and “M/E charge air Cooler” as the main engine load factors, and “L.O cooler”, “CYL jacket”, and “Air cooler” as the generator load factors [
22].
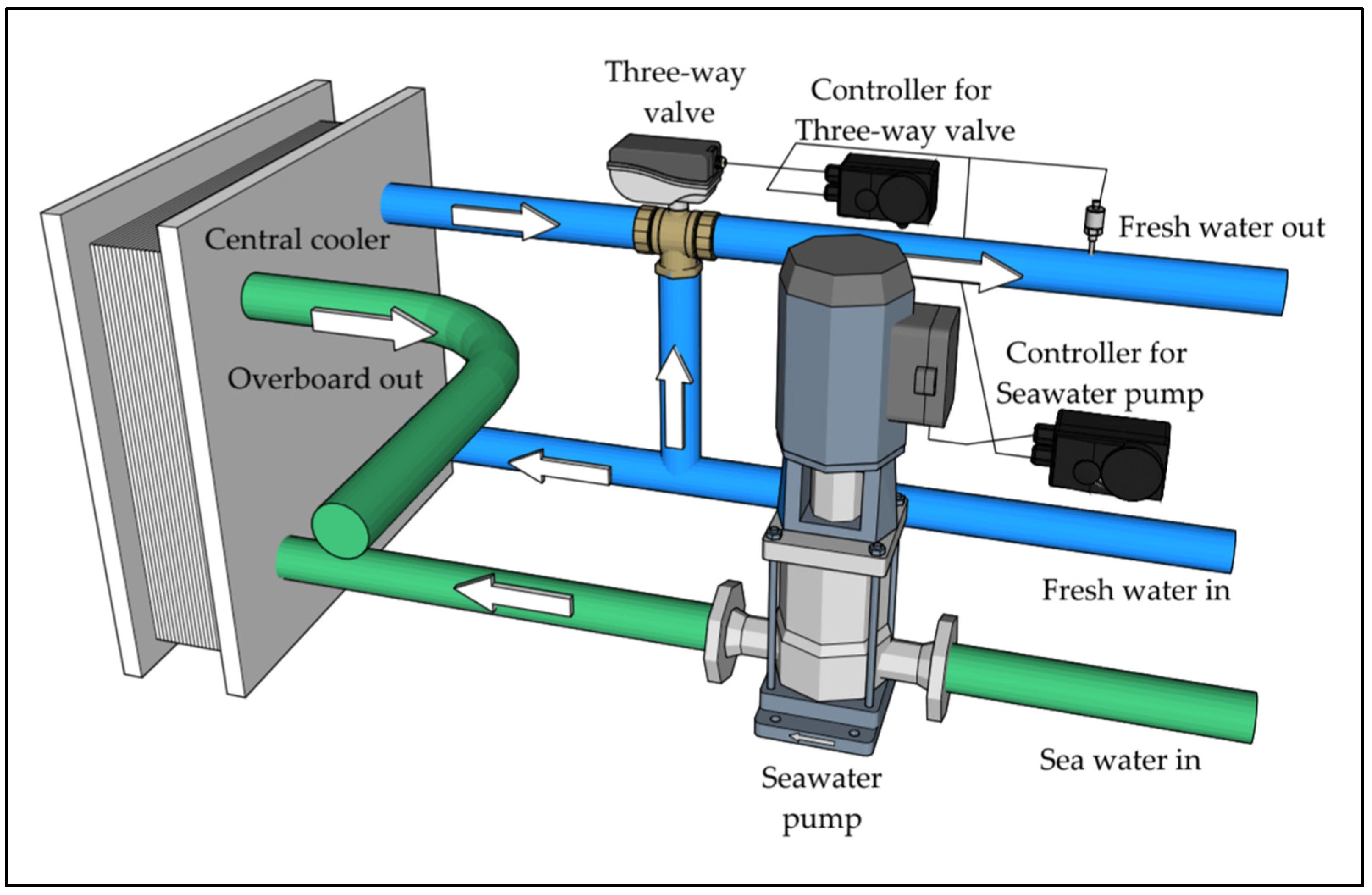
Figure 4 categorizes the central cooling system, constructed into heat load, heat exchanger, three-way valve, and seawater pump.
First, the cooling water that has recovered waste heat from the heat load enters the inlet of the three-way valve. In the three-way valve system, part of the cooling water enters the central cooling water cooler, whereas the rest is bypassed, and merges with the cooling water from the central cooling water cooler, after which it flows back to the heat load side.
The opening degree of the three-way valve is determined by the control value of Controller for Three-way valve, which takes the error between the three-way valve outlet temperature and the desired value (Setting Temp 35 °C) as input.
As for seawater, the flow rate increases or decreases as the power frequency of the seawater pump is controlled by Controller for Seawater pump, according to the same error used in the three-way valve.
Seawater discharged from the seawater pump enters the seawater side of the central cooling water cooler, recovers waste heat from the central cooling water, and discharges it overboard [
22,
23].
3.1. Heat Load
Here, we look at the input/output configuration of the heat load entering the central cooling system.
Figure 5 shows the heat load of the model ship mentioned in
Figure 3 and
Figure 4.
In the figure, the inputs are the initial temperature (Initial Temp) and load change (ME Load), and the output is the cooling water temperature (Temp out). Here, the density and specific heat are assumed to be the same.
Density, specific heat, and initial temperature are input as constant values, whereas the load change is a variable input, as illustrated in
Figure 6. The data related to the load change are extracted from the operation information at the time of arrival and departure of the actual model ship.
The load change (ME Load) is the input to the load side of the “M/E LO Cooler,” “M/E Charging Air Cooler,” “Int-Shaft Bearing,” “S/T LO Cooler,” “CPP Oil Cooler,” and “MGO Cooler for M/E SCR Blower Unit,” whereas the temperature is the output from each heat exchanger.
In addition, the load related to the generator is configured, as demonstrated in
Figure 5, inside the D/G Cooler. In the figure, the generator load change (Generator Load) is the input to the load side of the “L.O COOLER,” “CYL JACKET,” and “AIR COOLER,” whereas the temperature is the output from each heat exchanger.
All other loads are configured as Etc (Fixed Load), as demonstrated in
Figure 5, and output at a constant temperature.
Each output temperature (T) is divided by each output flow rate (Flow) and heat capacity (m
c) multiplied by specific heat and density; the final output is the composite temperature (T
m). The details are covered in
Section 3.3. The output of the flow rate is obtained by summing all the values provided in the specifications of each heat exchanger.
Figure 6 is a scaled-down drawing of the section in which the ship uses the main engine load during one voyage. In general, it takes 1.5 to 2 h when the ship departs and sails in the navigation full ahead (R/up Eng′), but in this paper, is operating by. This simulation experiment was carried out under the assumption that rapid control of the opening of the three-way valve and the variable speed of the pump is performed in response to sudden load fluctuations of the main engine during a short period of time (280s). it is also differently controlled in the normal voyage of the ship.
For example, the operation time of the main engine and the generator load was set to 280 s, but it does not operate as such in the actual operation of a ship. The duration of departure is from 0 to 100 s, and from 100 to 180 s is the R/up Eng’ section of normal voyage. In addition, at 180 s, the load of the main engine was suddenly dropped, and the load section was set to prove the effectiveness of the feed forward PID controller proposed in this paper. In addition, this was set up to re-verify the effectiveness of the proposed controller by increasing the load step by step from 180 s to 240 s.
3.2. Heat Exchanger
Here, we examine the input/output configuration of the central cooler, one of the elements depicted in
Figure 4The heat exchanger can be expressed, as shown in
Figure 7, assuming that thermal equilibrium is always achieved in the heat exchanger according to the first law of thermodynamics.
As the fluids and flow from the inlet (in) to the outlet (out), respectively, heat exchange is performed through the heat transfer plate.
Here, the heat energy released when the fluid moves from the inlet to the outlet and the heat energy recovered when the fluid moves from the inlet to the outlet are the same as the heat energy transferred from the fluids to .
Therefore, the heat energy transferred from fluid to fluid can be expressed as Equation (1) [
24,
25].
The smaller of the heat capacities
and
of the two fluids flowing in the cooler,
is the product of the flow rate
and the specific heat
.
The transfer capacity of the cooler plate
is multiplied by the heat transfer rate
and area
.
Substituting this into Equation (1), the heat energy
can be obtained as Equation (4) by multiplying the parallel sum of the heat capacity of the fluid
and the transfer capacity of the cooler plate
with the difference in inlet temperature of each fluid.
The temperature changes
and
from the inlet to the outlet of each fluid can be obtained by dividing the heat capacities
and
of each fluid by the total heat energy
transferred per hour.
By subtracting the temperature change
from the inlet temperature
and adding
to the inlet temperature
, the temperatures
and
of each fluid are obtained as the output.
In the central cooling water cooling system, R
1 is the heat capacity of cooling water and R
2 is the heat capacity of seawater. As input values, seawater has a temperature of 27 °C and a specific heat of 0.94 kcal/kg °C. The heat transfer rate, heat transfer area of the central cooler, and the number of coolers used are 6092 kcal/m
2h °C, 90.4 m
2, and two pairs, respectively [
26].
The heat transfer rate is 6092 kcal/m2h °C (7167 × 0.85), assuming a heat transfer rate of 7167 kcal/m2h °C and 85% of the dirt factor of the cooler. The calculated values are the output to the outside of the central cooler as (Fresh Water Temperature Out) and (Sea Water Temperature Out).
Substituting the values given in Equation (4), the amount of heat is:
Substitute the given values, and weight the number of coolers and 85% efficiency.
Dividing the denominator and numerator by 0.94 is as follows.
Using Equations (5) and (7) the fresh water outlet temperature is as follows.
Using Equations (6) and (8) the seawater outlet temperature is as follows.
3.3. Three-Way Valve
In
Figure 8, the bypass amount of the three-way valve is increased or decreased by adjusting the opening degree with the controller according to the cooling water outlet temperature of the three-way valve.
Therefore, the difference between the bypassed flow rate (
) and the flow rate coming from the load (
) is the flow rate of heat exchanged in the cooler (
) [
27].
If the temperatures of the fluid (
) from the outlet of the cooling water cooler and the bypassed fluid (
) are
and
, respectively, the temperature of the two fluids mixed in the three-way valve is expressed as Equation (10) according to the heat transfer effectiveness and number of transfer units (NTU) method.
represents the degree of opening to the bypass side. Using %B, Equation (10) can be expressed as:
4. System Experiment
4.1. System Composition
First, to observe the problems occurring in the existing central cooling water cooling system, an experiment is conducted based on the configuration shown in
Figure 8. The cooling water outlet set temperature is set to 35 °C, and the temperature of seawater supplied to the variable-speed seawater pump is set to 27 °C.
The fluctuation of the heat load entering
in Equation (9) is based on the actual operation data for the load fluctuation of the main engine.
Figure 6 shows the load of the main engine over time, which is used as the input of the heat load fluctuation.
4.2. System Composition Results
First, the parameters of the controller are tuned to obtain a value similar to that of the model ship. The main engine load fluctuation depicted in
Figure 6 was used as an input, and an experiment was performed through Simulink to obtain the result demonstrated in
Figure 9.
The first graph in the figure shows the change in the load fluctuation input (M/E LOAD) of the main engine over time and the change in FW out (1), which is the cooling water temperature at the outlet of the three-way valve.
The second graph shows the SW flow (1), which is the change in flow rate of the seawater pump over time.
The third graph shows the Cooler flow (1), which is the opening degree of the three-way valve on the cooler side over time.
As with the model ship, it can be seen that the flow rate of the seawater pump is operated with the flow rate fixed at 100% due to the interference between the variable- speed seawater pump controller and the three-way valve controller. The opening of the three-way valve is controlled such that it is slightly opened towards the cooler.
In addition, the cooling water outlet temperature does not normally control the desired value (35 °C), and errors continue to occur.
Figure 9 is the flow rate of the variable speed seawater pump that appears in the model ship Hannara when the PID controller is installed according to the M/E and G/E loads described in
Figure 6, and the bottom graph shows the three-way opening. To explain again, the graph at the top of
Figure 9 shows that the temperature of F.W (blue line) is constant even with the load fluctuations of M/E and G/E, so that control is more or less performed. However, the middle graph shows the total amount of the flow rate of the variable speed seawater pump, and it can be seen that the variable seawater speed pump consumes a lot of energy by operating full load. In addition, it can be seen that the cooler three-way valve is operated in an almost closed state so that proper control is not achieved.
4.3. System Composition with Feed-Forward Controller
To solve the problems mentioned in the previous section, we intend to improve the control performance by adding a feed-forward controller to the existing system.
Figure 10 shows the configuration of the system in which the feed-forward controller using the main engine load as the disturbance process variable is combined with the existing system in
Figure 4.
This is the addition of a feed-forward controller that uses the output signal from the “ME Load change” as an input value to the system configured, as demonstrated in
Figure 6. The output of the feed-forward controller and the output of the three-way valve controller are added to form a system that serves as the input of the three-way valve.
4.4. System Composition Results with Feed-Forward Controller
The experimental results for the system in
Figure 10 combined with the feed-forward controller are shown in
Figure 11.
Compared with the fresh water outlet temperature “FLOW (1)” of the existing system, the first graph shows that the dotted line of “FLOW (2)” of the system in which the feed-forward controller is installed approaches the desired value of 35 °C.
The second graph shows that the “SW flow (2)” is controlled and increases or decreases based on the load fluctuations of the main engine compared with the seawater pump flow rate “SW FLOW (1)” operated at 100% flow rate in the existing system.
In the third graph, compared to the cooler flow (1) of the existing system, it can be seen that “cooler flow (2)” reacts and opens in advance according to the load fluctuations of the main engine.
In summary, the opening degree of the three-way valve is controlled according to “ME load”, and “cooler flow (2)” increases or decreases based on the load fluctuations of the main engine.
Figure 9 can be seen as a graph that occurs when only PID is installed, whereas
Figure 11 can be seen as a graph when a feed-forward controller is installed. The top graph is the FW outlet temperature according to M/E and G/E load fluctuations, the solid blue line is the temperature graph when PID is applied, and the dotted blue line is the temperature controlled by about 22% lower than the solid blue line.
In other words, it was confirmed that when the feed-forward controller was applied, the outlet temperature of F.W was effectively controlled by about 22%. In addition, the middle graph shows the flow rate of the variable seawater pump. The purple solid line is the case when PID is applied, and the green dotted line is the graph showing the case when the feed-forward controller is applied.
When the variable speed seawater pump is operated with a green dotted line, energy savings of about 22% compared to the purple solid line can be seen. In addition, the bottom graph is the yellow line showing the cooler’s three-way opening degree when PID is applied, and the blue dotted line is the graph with the feed-forward controller applied. In other words, the feed-forward controller has a faster adaptive control than the case of applying PID, and thus energy savings can be seen.
In other words, effective energy saving is achieved by controlling the seawater flow rate as the heat energy entering the central cooler increases or decreases.
5. Conclusions and Recommendations
Due to a disturbance called load fluctuation (main engine load), the output process affects both the three-way valve controller and the variable-speed seawater pump controller. The reason for the study of this paper was that the model ship Hannara applied the three-way valve controller and the variable-speed seawater pump controller with the PID control method, but the variable seawater pump fully continued to operate and the cooler’s three-way valve was almost closed. Such behavior often have occurred on board ship. To overcome this phenomenon, effective results were obtained by applying a feed-forward controller according to the load fluctuation of M/E and G/E to both devices. When comparing PID control method in
Figure 9 and the feed-forward control method in
Figure 11 that puts the loads of M/E and G/E as input variables in advance. In this case, a variable seawater pump could save energy by about 22%.
As a result of the experiment by installing a feed-forward controller for disturbances so that the influence of these output variables is first reflected in the three-way valve controller, it was confirmed that the flow rate of the variable-speed seawater pump was smaller compared to that before the installation.
By applying a feed-forward controller, the sensitivity of the three-way valve controller to disturbances is increased, reducing the energy consumption of the seawater pump and solving the interference phenomenon between the controllers.
However, additional disturbances, such as a decrease in efficiency due to an increase in the pollution degree of the seawater side of the central cooling water cooler or a change in seawater temperature, may affect the performance of the feed-forward controller.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










