2.1. Floater and Mooring System
To reflect the complexity of the mooring system, a Floating Production Storage and Offloading (FPSO) platform with a turret system is selected as a case study. The FPSO is a very popular floater type for deep-sea and ultra-deep-sea applications in the oil and gas industry and enable the production and storing of oil or gas. The turret system installed at the FPSO is an internal turret type, and the distinctive feature of a turret system is the weathervane. The turret system makes the FPSO adjust its azimuth to a direction with a lower environmental load. The particulars of the FPSO are shown in
Table 1.
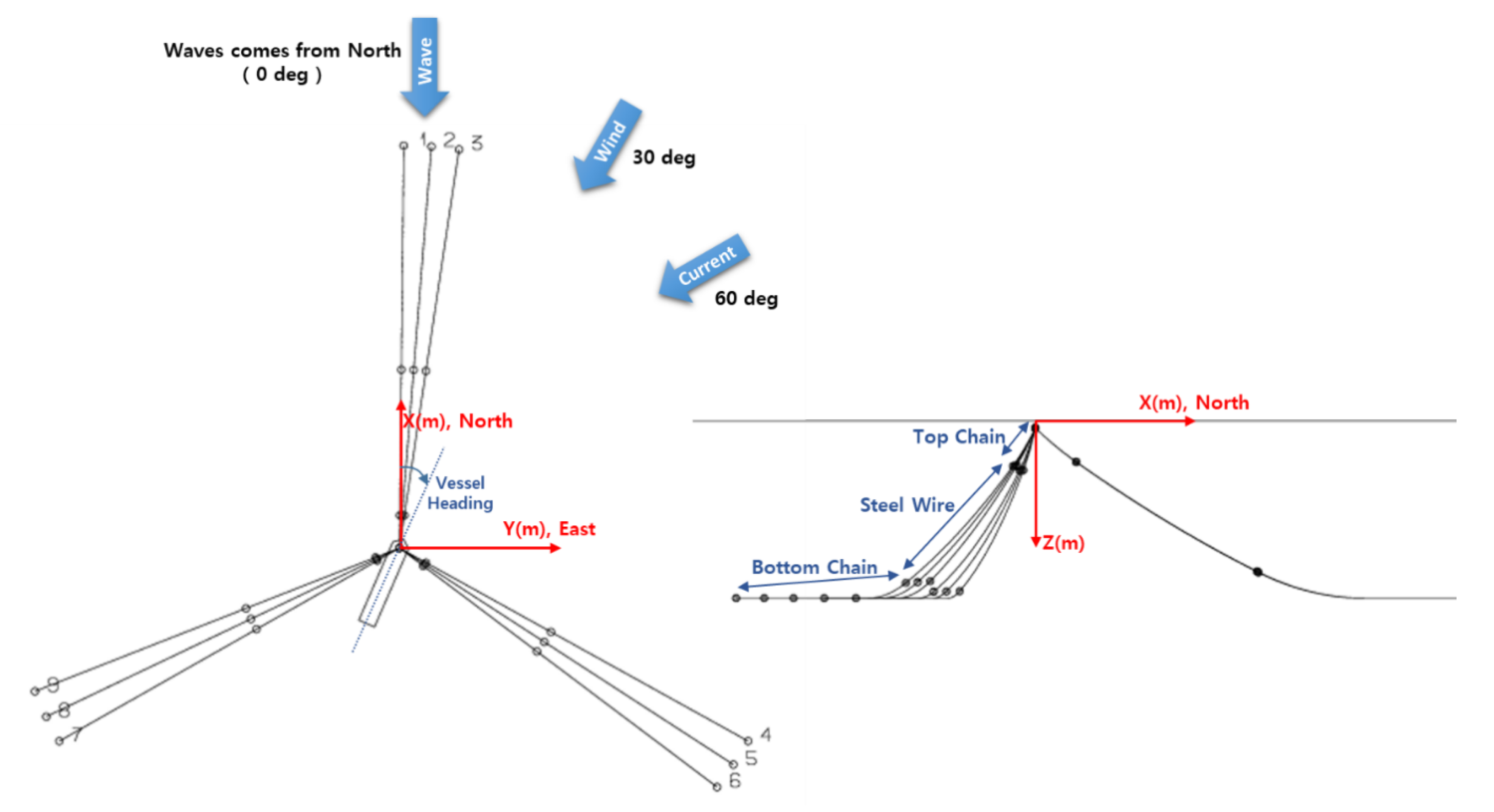
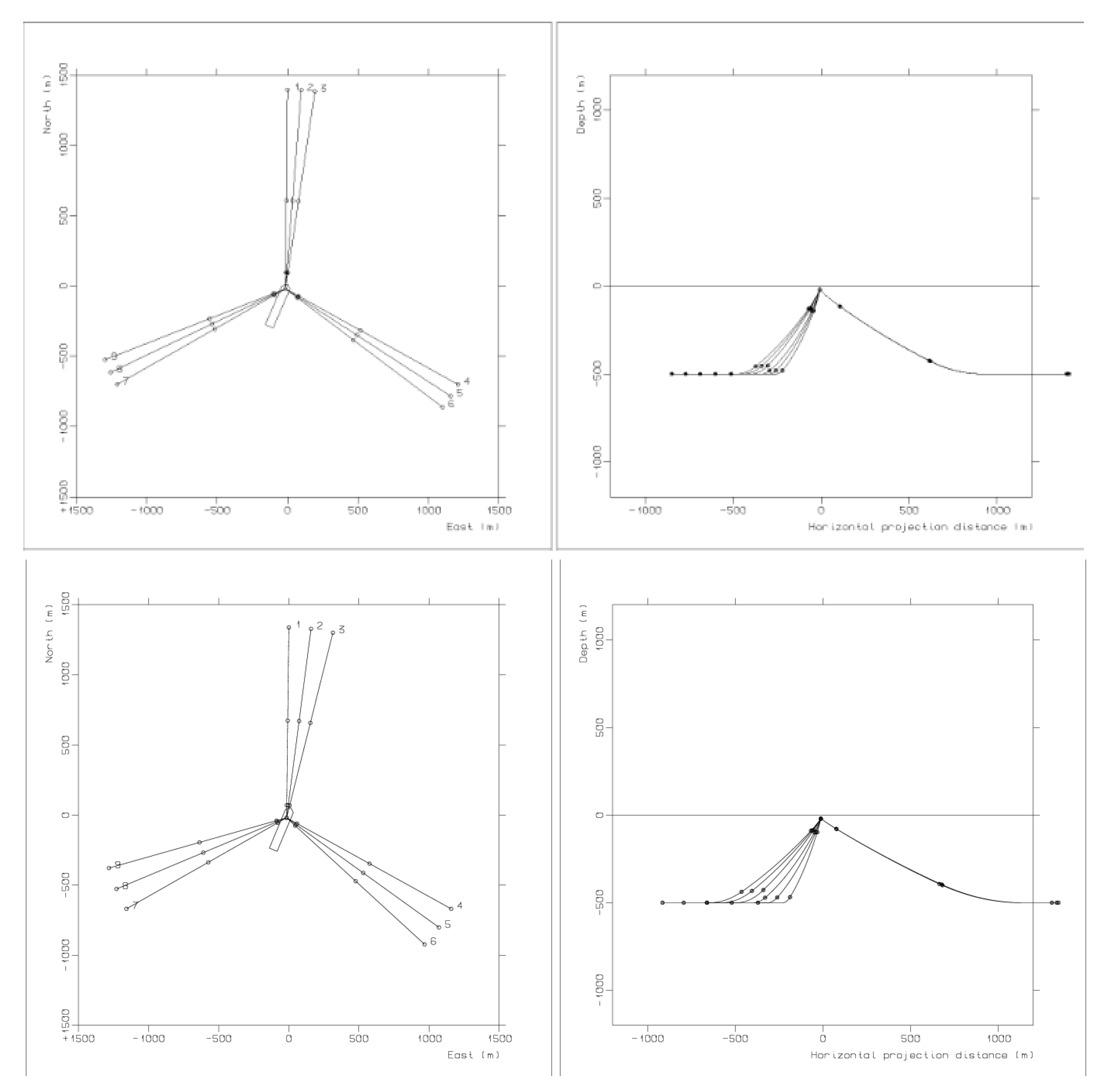
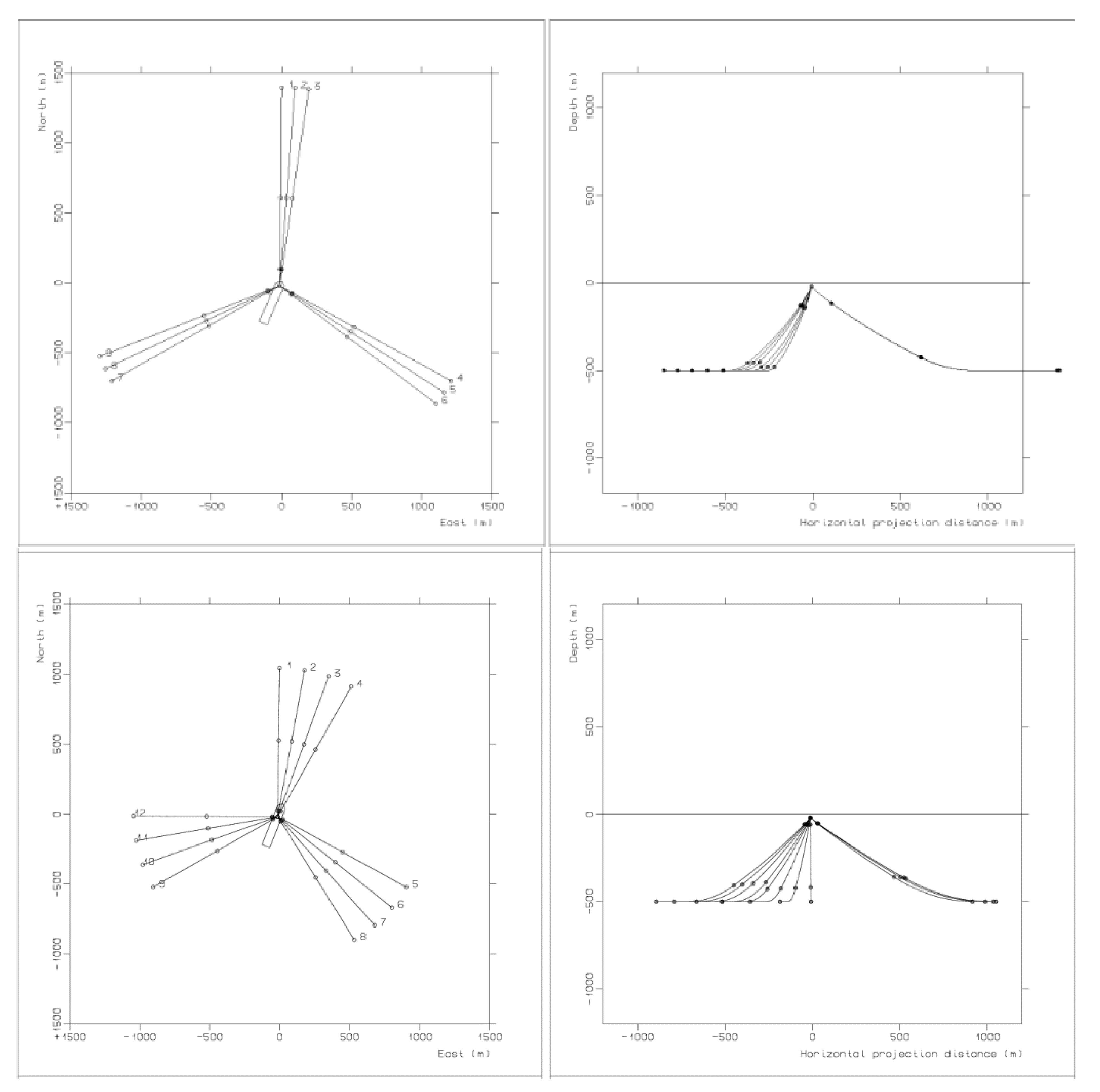
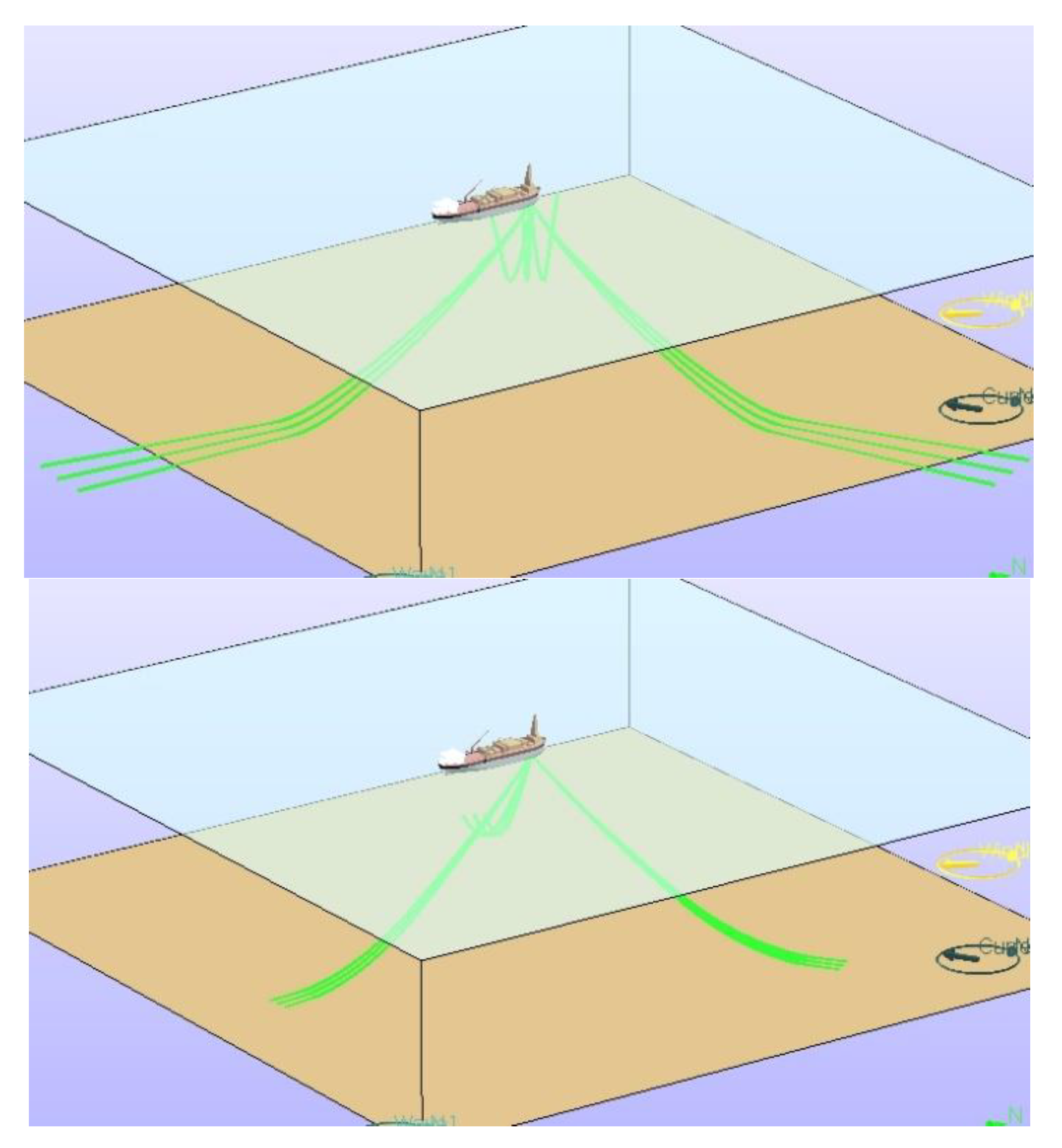
The initial design of the internal turret system has three groups of mooring lines, and each group has a further three mooring lines. In the present study, risers and umbilical cords are not considered in the mooring system design. As shown in
Figure 1, the first group is aligned toward North, and the second and third groups are arranged from 120 degrees clockwise rotation apart from the first and second group, respectively. The initial number of degrees between the adjacent mooring lines in a group is 4 degrees. Each mooring line consists of a studless bottom chain, spiral strand wire rope and studless top chain. The bottom chain is connected to the embedded anchor, which is submerged to the seabed. The bottom chain weight contributes to the anchor’s holding capacity, and the chain provides good abrasion resistance to the seabed. A spiral strand wire rope used for the intermediate segment of the mooring line has a high strength-to-weight ratio, so it minimizes the vertical loads on the turret bearings, and the elongation rate of the steel wire and chain used for the anlaysis is 1% at minimum breaking load (MBL). The top chain, connected to a chain stopper, makes it easy to adjust the mooring line length since the design lengths of the mooring lines may not be the same as the installation line lengths due to uncertainties caused by the on-site anchor position.
In the initial condition, the FPSO heading points North. The
X-axis and
Y-axis in the global coordinate system are directed East and North, respectively. As shown in
Figure 1, the
X-
Y plane coincides with the free water surface, and the
Z-axis points downwards. The motion of the FPSO is described relative to the global fixed coordinate system, with a positive rotation clockwise.
2.2. Numerical Simulation Tools
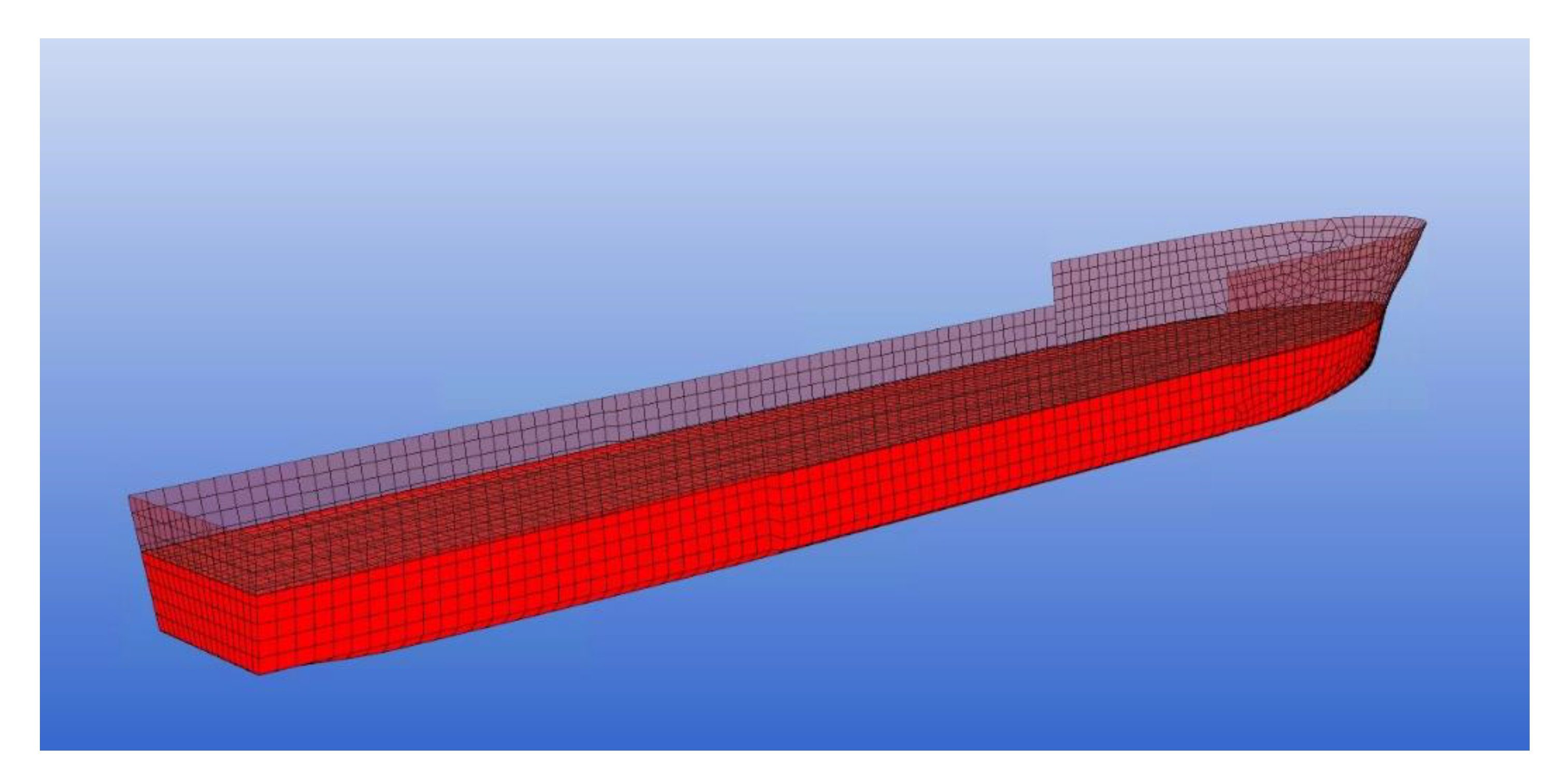
Hydrodynamic analysis is performed via HydroStar (BV, Paris, and France), a three-dimensional diffraction and radiation analysis tool developed by BV. HydroStar is based on potential theory and calculates added mass coefficients, radiation damping coefficients and excitation forces [
14]. For wave frequency calculation, the frequency range used in the analysis was from 0.15708 rad/s (40 s) to 2.0944 rad/s (3 s). The interval was 0.5 s when the wave frequency is close to the on-site conditions otherwise the interval was 1.0 s. Viscous damping forces which cannot be calculated from the software are very important for determining vessel motions, especially for the roll direction. Without viscous damping, the hydrodynamic analysis results may deviate from model test results. Thus, 5% of the critical roll damping is added to compensate for this. In addition, wave-drift damping is neglected.
Figure 2 shows the panel model of the FPSO used in the HydroStar.
For the mooring system analysis, frequency and time-domain analysis methods are commonly used. Frequency domain simulation is computationally cheap, and is an efficient way to analyze a large set of mooring system cases. It is widely used for parameter studies and concept design studies in the early stage. Since wave frequency (WF) and low-frequency (LF) motions and tension responses are carried out in the frequency domain, the LF response is managed by linearizing the non-linear vessel and mooring responses. Thus, the frequency domain simulation inevitably introduces some errors. On the other hand, the time-domain analysis takes account of the nonlinear effect so that the mooring simulation results are more accurate than those of the frequency domain simulation. However, the time domain analysis is computationally expensive, and is used to check critical cases in the final design stage.
In the present study, both frequency and time domain analysis tools are used for mooring system analysis. For the frequency domain analysis, MIMOSA (Marintek, Oslo, and Norway), developed by MARINTEK, is used for the static and dynamic analysis of moored vessels [
12]. It is capable of computing static and dynamic environmental loads, corresponding rigid-body vessel motions, and static and dynamic mooring tensions. For the time domain analysis, Ariane7 (BV, Paris, and France), a hybrid mooring analysis tool developed by BV, is used. Ariane7 calculates 6 degree of freedom (DOF) low-frequency motions at time domain, and 6 DOF wave frequency motions calculated in the frequency domain using Hydrostar are added to the 6 DOF low frequency motions. That is, Ariane7 is a hybrid time domain analysis tool which does not use convolution to convert wave frequency responses to those in time domain. The reason why Ariane7 is selected for this study is that it matches with the goal of mooring system optimization. The mooring analysis tools should be computationally cheap to calculate the tons of iterations, and Arian7 is very efficient for screening critical cases. This study is looking for a possibility of optimization applications to the mooring system design in early engineering stage. For the final mooring system design, the selected optimized cases should be reanalyzed by fully coupled time domain analysis tools with seed variation. Similarly to MIMOSA, Ariane7 is capable of static and dynamic computation under a given set of environmental conditions. In addition, Ariane7 takes account of the nonlinear line characteristic, which is not available in MIMOSA. The total duration and time steps for the time domain is 3 h and 0.5 s, respectively.
To find an optimal solution, a large set of parameter studies are required. Changing variables manually is both time-consuming and tedious. To expedite the process, automation technology is applied for optimization. Process Integrated Automation and Optimization (PIAnO (PIDOTECH, Seoul, and Republic of Korea)) software is used for automation and optimization. PIAnO is commercial software developed by PIDOTECH and provides various optimization algorithms with the automation technique. For the time-domain analysis using Ariane7, PIAnO is not capable of automating Graphical user interface (GUI) based software, so the automation script is coded using AutoIt.
2.3. Environmental Loads
The environmental condition provides information on the static and dynamic loads on the floating bodies. Static loads come from wind, current and wave drift forces. Dynamic loads are a combination of WF and LF components. The WF load comes from the 1st order wave load, and is typically independent of mooring stiffness due to the short period. LF loads come from the 2nd order wave load (slowly varying the wave drift force) and wind. LF loads can have a significant impact on the mooring system due to their closeness to the natural period of the mooring system, and should be considered in the design of the mooring system. MIMOSA calculates LF loads in the frequency domain by linearizing the nonlinear properties, while Ariane7 calculates LF loads in the time domain by taking account of nonlinear properties.
In the actual project, the ultimate limit state (ULS), fatigue limit state (FLS) and accidental limit state (ALS) should be considered for the mooring system design. To simplify the optimization problem, only the ULS with the intact condition is considered. The environmental design condition of the ULS is shown in
Table 2. This environmental combination is selected from the most unfavorable condition for the turret mooring system, and thus the headings of the wave, current and wind directions are not collinear. The directions of the environmental loads are defined from North and their sign convention is a positive clockwise rotation, as described in
Figure 1. For example, a 0-degree wave means that the waves propagate South from the North. The wave spectrum used for the analysis is the Joint North Sea Wave Observation Project (JONSWAP) spectrum with gamma 3.3, sigma values 0.07 and 0.09. The wind spectrum used for the analysis is the Norwegian Petroleum Directorate (NPD) spectrum, and the wind speed value is measured as a one-h average at 10 m height.
2.4. Optimization Algorithm
A total of 11 independent design parameters are used for the optimization of the mooring system, and are listed below:
Turret position;
Number of mooring lines;
Number of groups;
Adjacent angle between mooring lines;
Length of each segment (bottom chain–steel wire–top chain);
Diameter of each segment (bottom chain–steel wire–top chain);
Pretension.
The lower and upper bounds for each design parameter are shown in
Table 3.
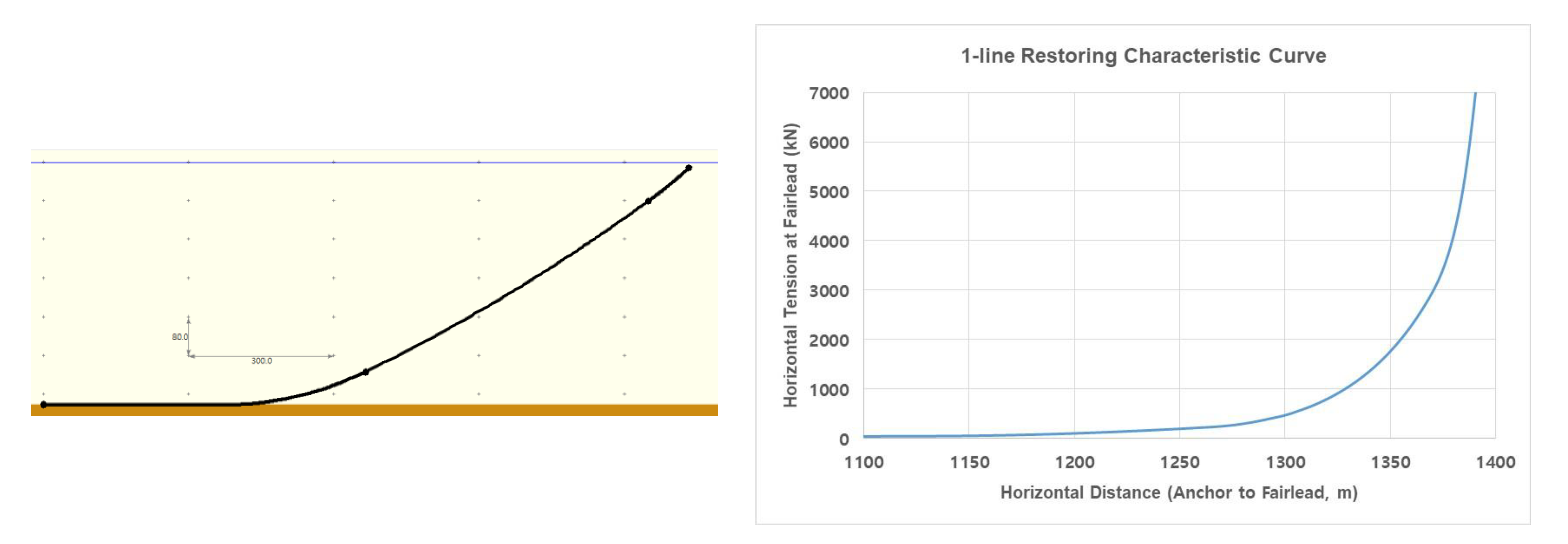
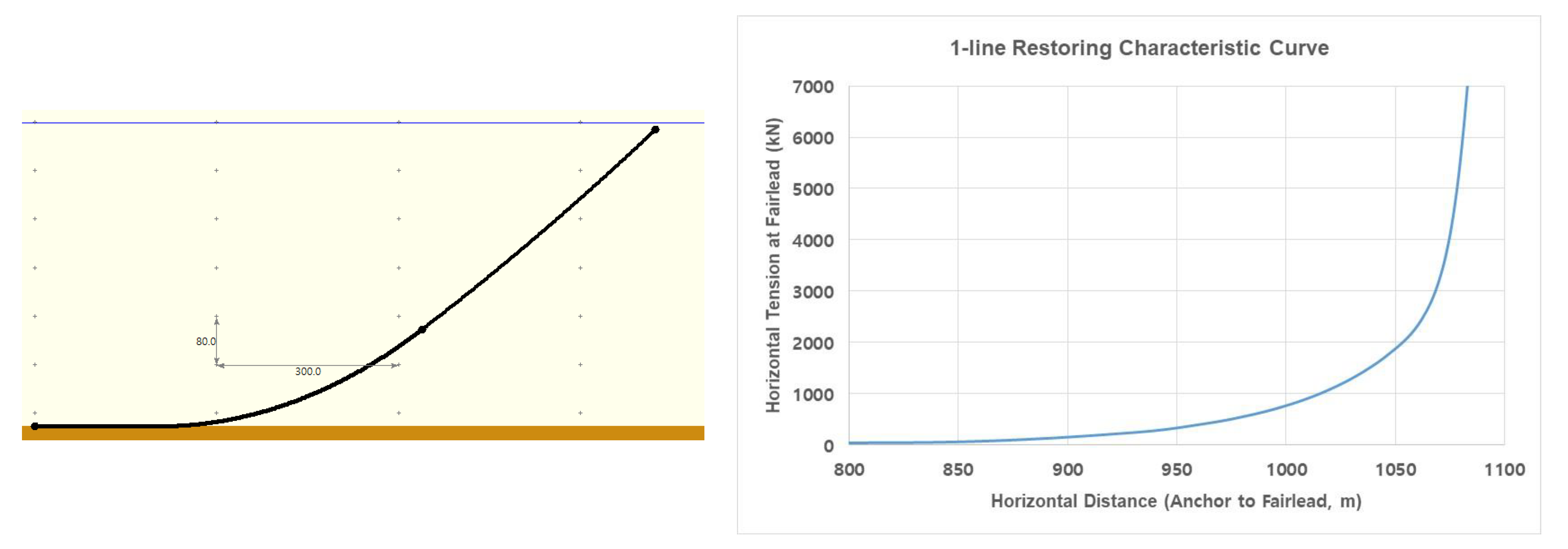
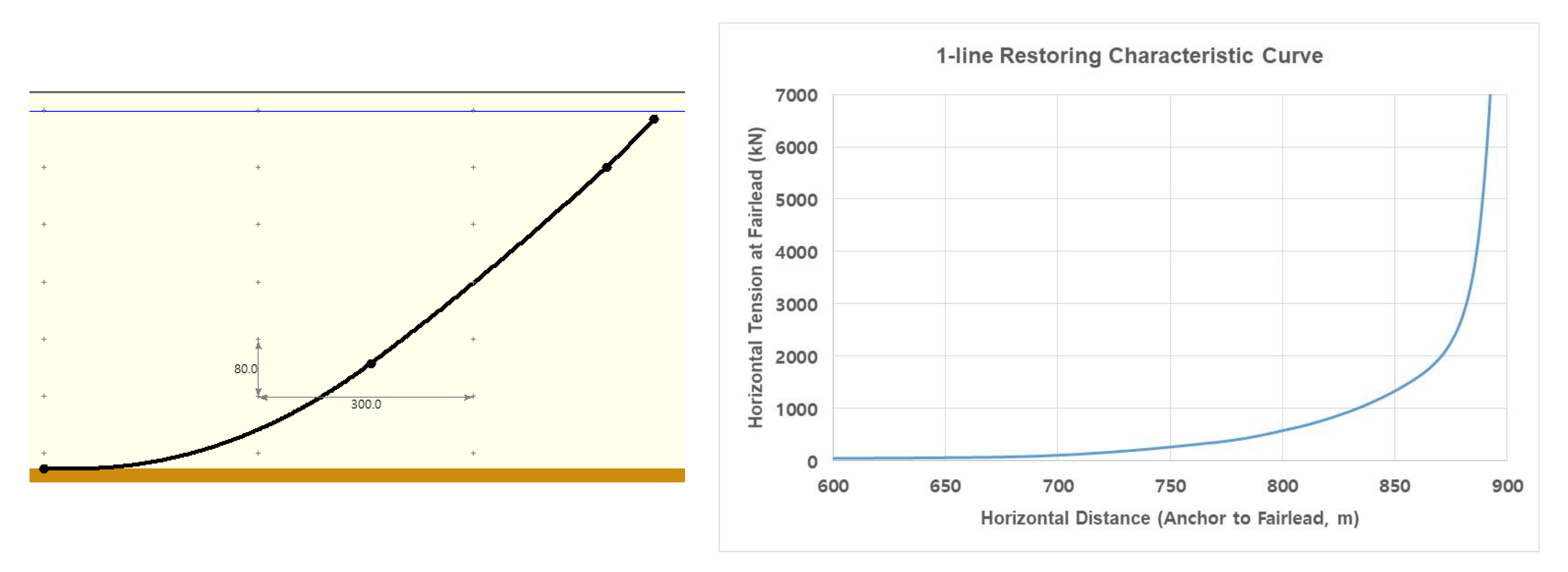
The mooring lines are assumed to be without bending stiffness, and only gravity force is acting on the mooring line. To describe the shape and tension of the mooring line, a catenary equation is used. Since the mass of the mooring line is small compared to the mass of the floater, it is assumed that the mooring line dynamics are neglected so that the mooring lines stay on a vertical plane and external loads from waves, wind and currents are not applied. In the catenary equation, if two out of the three variables are decided among the length of the mooring line, the distance from anchor to the fairlead, and pretension of the mooring lines, the remaining variable is automatically determined. In the optimization problem definition, it is very important to decide which variables are independent or dependent as the conclusions are taken from a satisfactory formulation of the optimization model. In the present study, the mooring line length and pretension are independent variables, and the distance from anchor to fairlead is selected as a dependent variable. Thus, the anchor position is calculated from the catenary equation in the mooring software.
The design constraints are listed as follows:
The anchor load is less than 4000 kN to prevent the uplift force, which is not desirable for an embedded drag anchor;
The safety factor of the mooring line tension at the fairlead is 2.5 to prevent mooring line failure;
The offset limit of the floater is 50 m, i.e., 10% of water depth due to constraints from the umbilicals or risers.
In the present study, the goal is to minimize the cost of the mooring system. The mooring system cost is complex, however, and is a function of many variables such as material cost, fabrication cost, the number of connecting components, the number of winches, the installation method, market conditions and the transportation cost of the mooring equipment to the place of manufacturing, etc. The installation cost is particularly dependent on not only the mooring system concept, but also site depth and location. Furthermore, the above factors vary depending on vendors, and it is difficult to get this information due to project confidentiality. To reduce the complexity and make an objective function simple, it is assumed that the cost of the mooring system design is proportional to the mooring line weight (material cost). Thus, the objective function is to minimize the weight of mooring lines in the mooring system as follows:
where
is the weight of mooring component, x is the design variables and N is the total number of design variables.
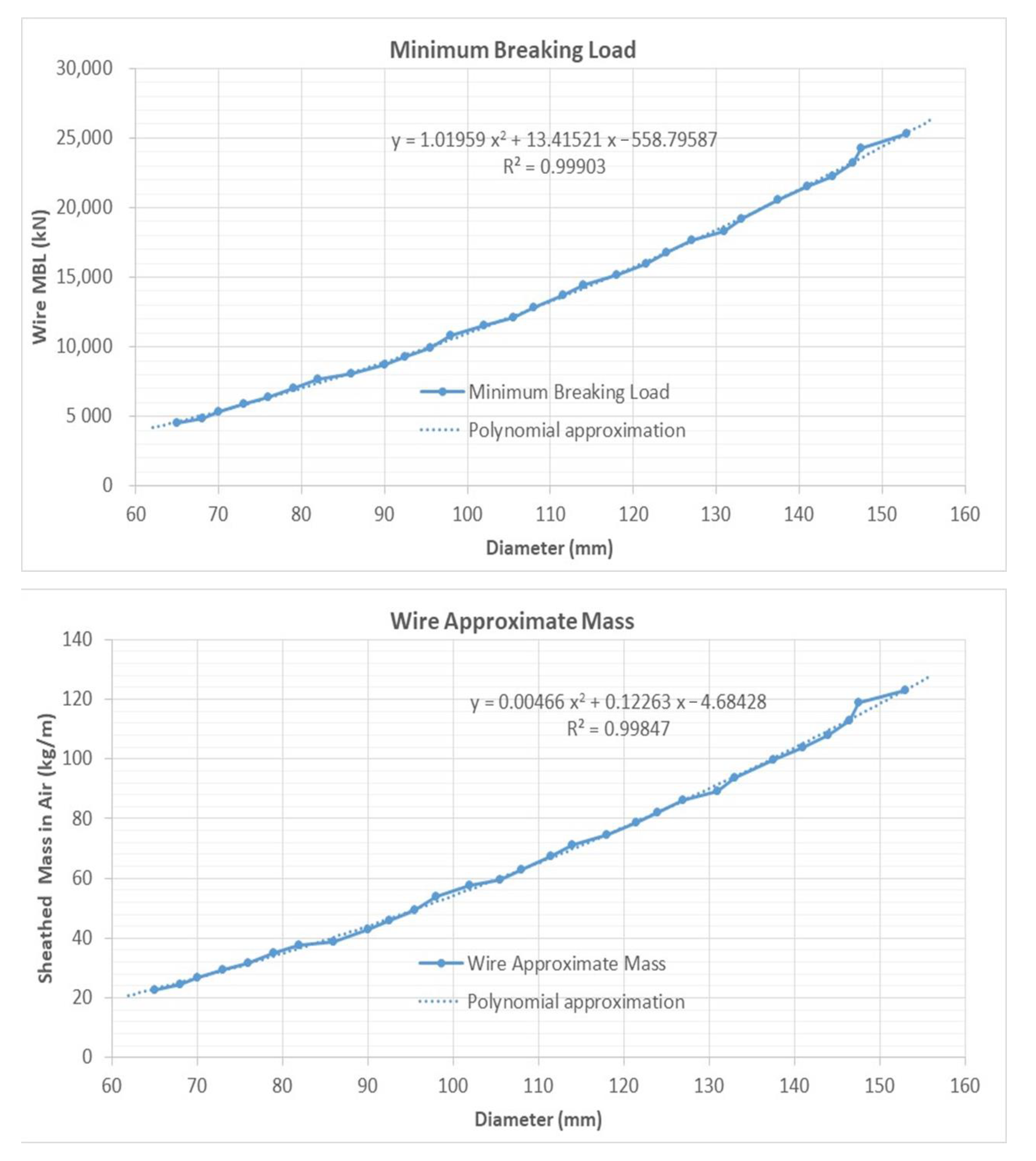
To address the objective function, the diameter of each segment in the mooring line is selected as an independent variable, and the dependent variables such as weight and MBL are affected by the diameter of each segment. For the bottom and top chains, an R4 grade studless chain is used. The weight and MBL of the R4 chain are estimated from formulas in the ABS guide [
15]. For steel wire, Xtreme Spiral Strand Wire rope (BRIDON-BEKAERT ROPES GROUP, Belgium, Zwevegm) from Bridon is used, and the formulas for estimated weight and MBL are derived using catalogue data supplied by the manufacturers [
16]. As shown in
Figure 3, the regression method is used to find the general expressions for line properties.
The formulas used to estimate the MBL and mass of the chain and steel wire in terms of diameter are summarized in Equations (2)–(5).
For the R4 studless chain,
where d is the nominal diameter of the chain.
For steel wire,
where x is the diameter of the steel wire.
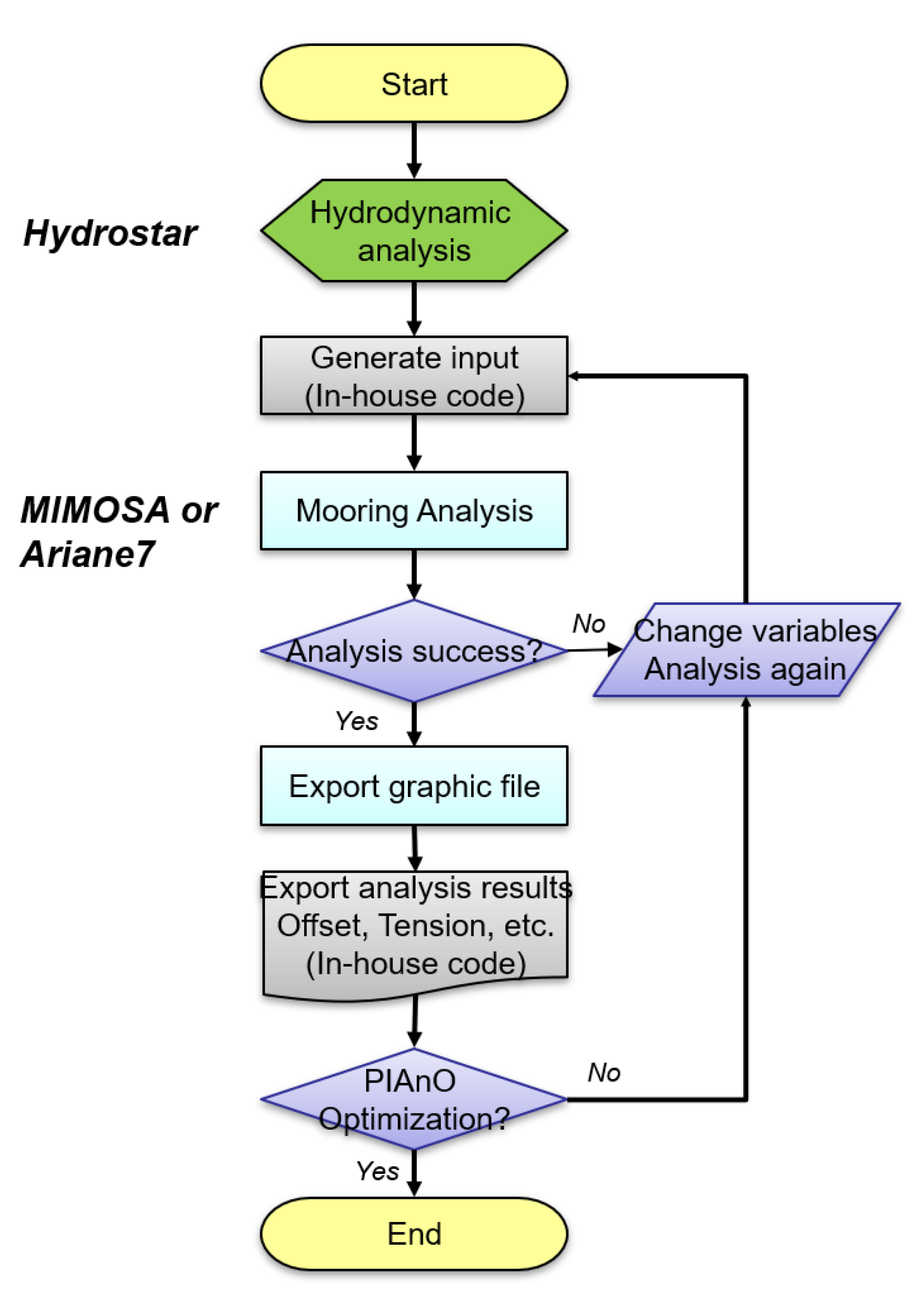
Figure 4 shows the overall flow of the optimization and automation algorithm. Each step is described as follows:
Define the optimization variables, constraints and objective function.
Specify the initial mooring system and design variables for the mooring software (MIMOSA for frequency domain analysis and Ariane7 for time-domain analysis).
Run the mooring software for the static equilibrium position of the floater and dynamic analysis of the mooring system and save the results.
Change the design variable and re-run the mooring software if an error occurs.
Start the optimization algorithm by PIAnO:
- (i)
Check the objective function and constraints;
- (ii)
Find a direction and a speed of convergence for the optimal solution;
- (iii)
Evaluate the convergence and constraints. If the optimal solution is found, iterations will be stopped, else return to step 3 and repeat until the optimal solution is reached.
The PQRSM and GA algorithms are utilized in the present study to examine the effect of the optimization algorithms on the optimization solution. The PQRSL, known for a weak global optimization algorithm, is based on a gradient search method. The GA algorithm, known for global optimization, consists of heuristic combinatorial search techniques. It should be noted that the optimization run may be terminated due to improper search direction, the vicinity of variable boundaries or negative constraint values. In that case, the results are carefully checked and initial data or variable range are modified in order to find the improved solution.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}