
Energy Management Using a Rule-Based Control Strategy of Marine Current Power System with Energy Storage System



Abstract
:1. Introduction
2. Description and Modeling of System
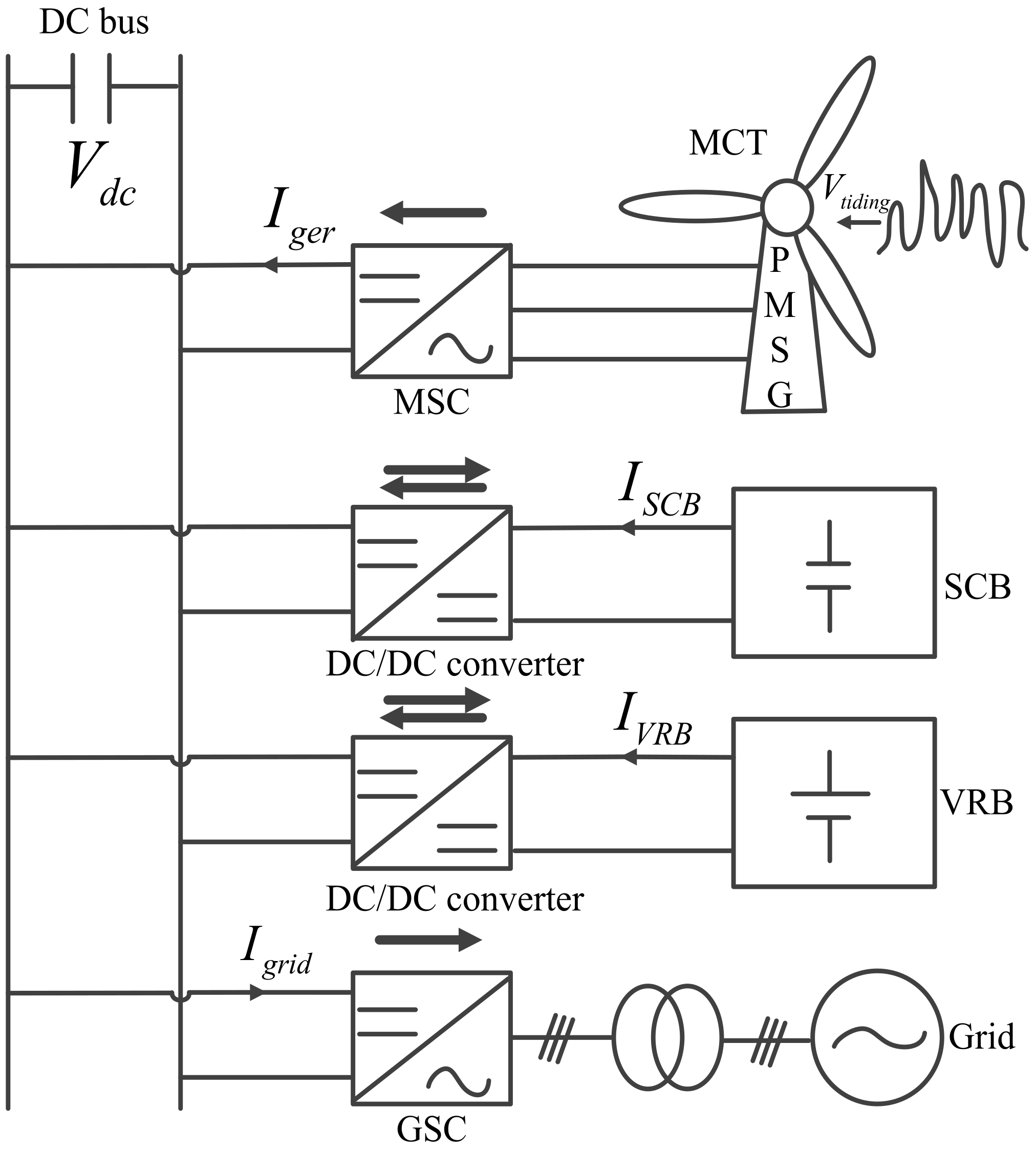
2.1. System Structure
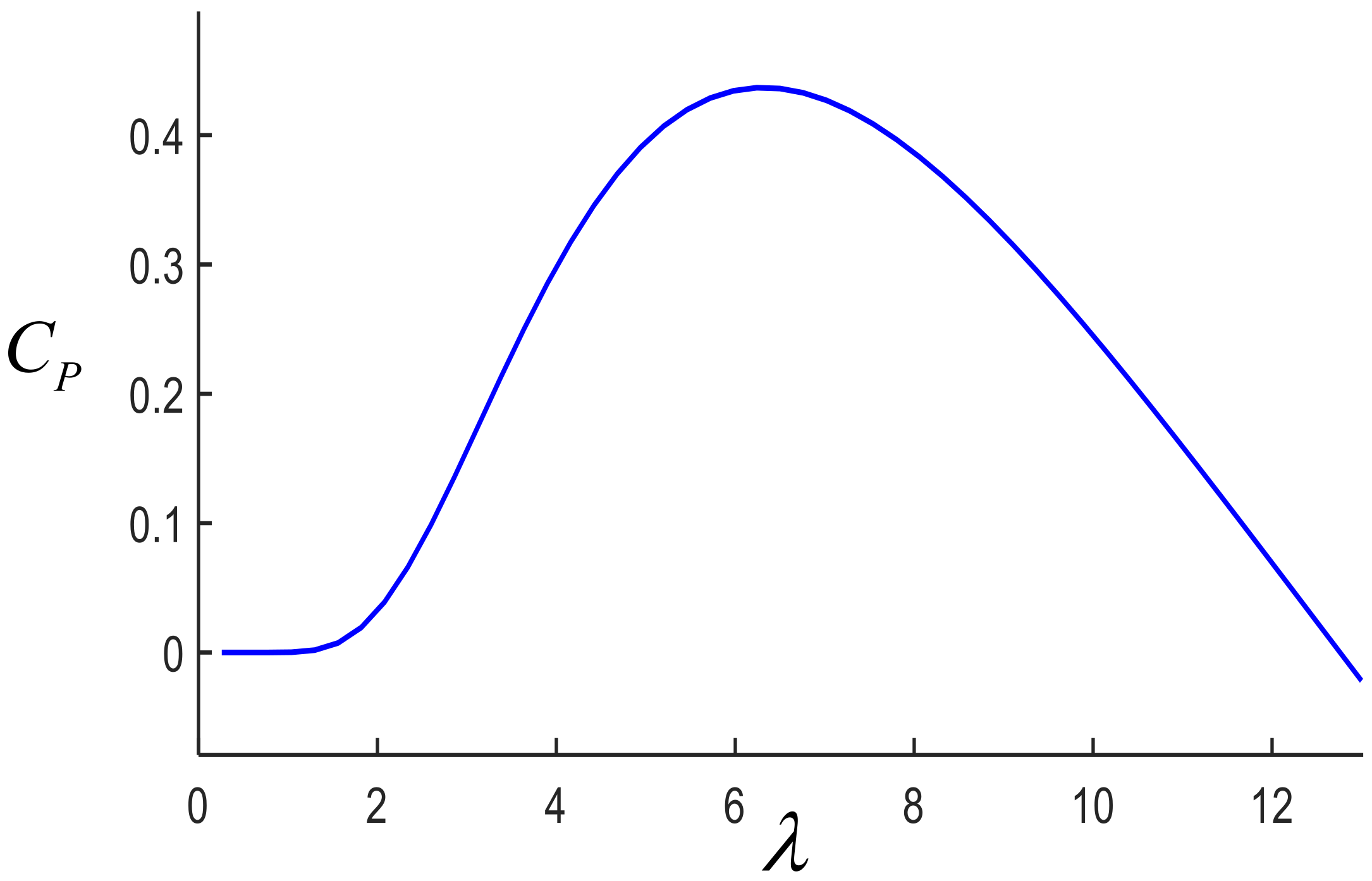
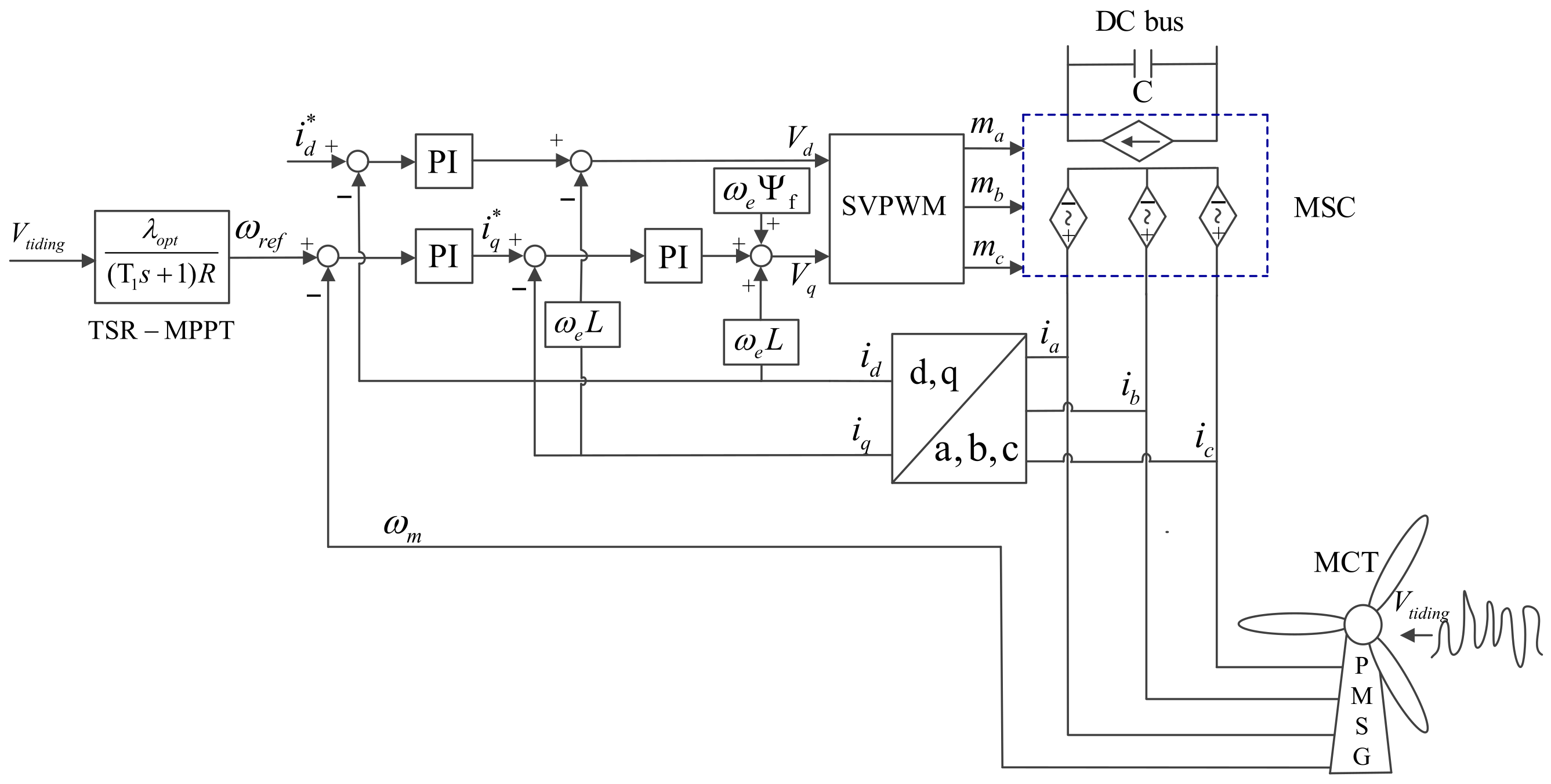
2.2. Modeling and Control of MCT and PMSG
2.3. Mathematical Model of VRB and SCB
2.4. Modeling and Control of the Grid-Side Converter
2.5. Mathematical Model of Marine Current Velocity
3. Energy Management Strategy
3.1. Efficiency Analysis of VRB under Constant Current Charge–Discharge Test
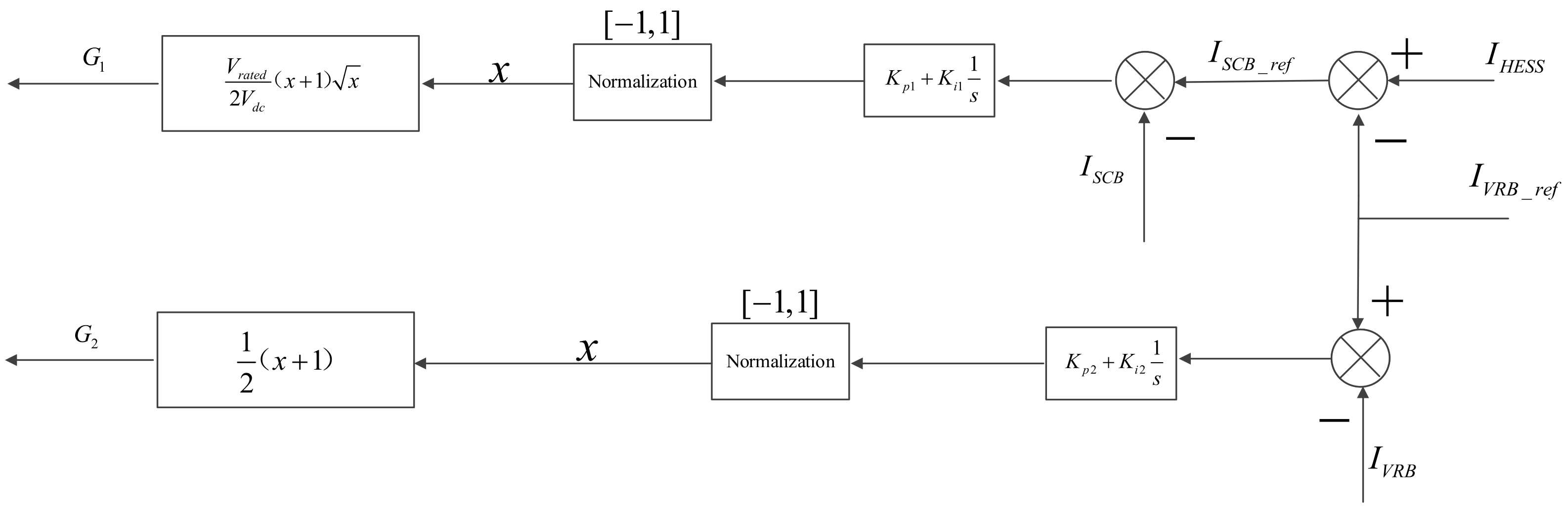
3.2. Energy Management Based on Rules Control Strategy
4. Simulation Results and Analysis
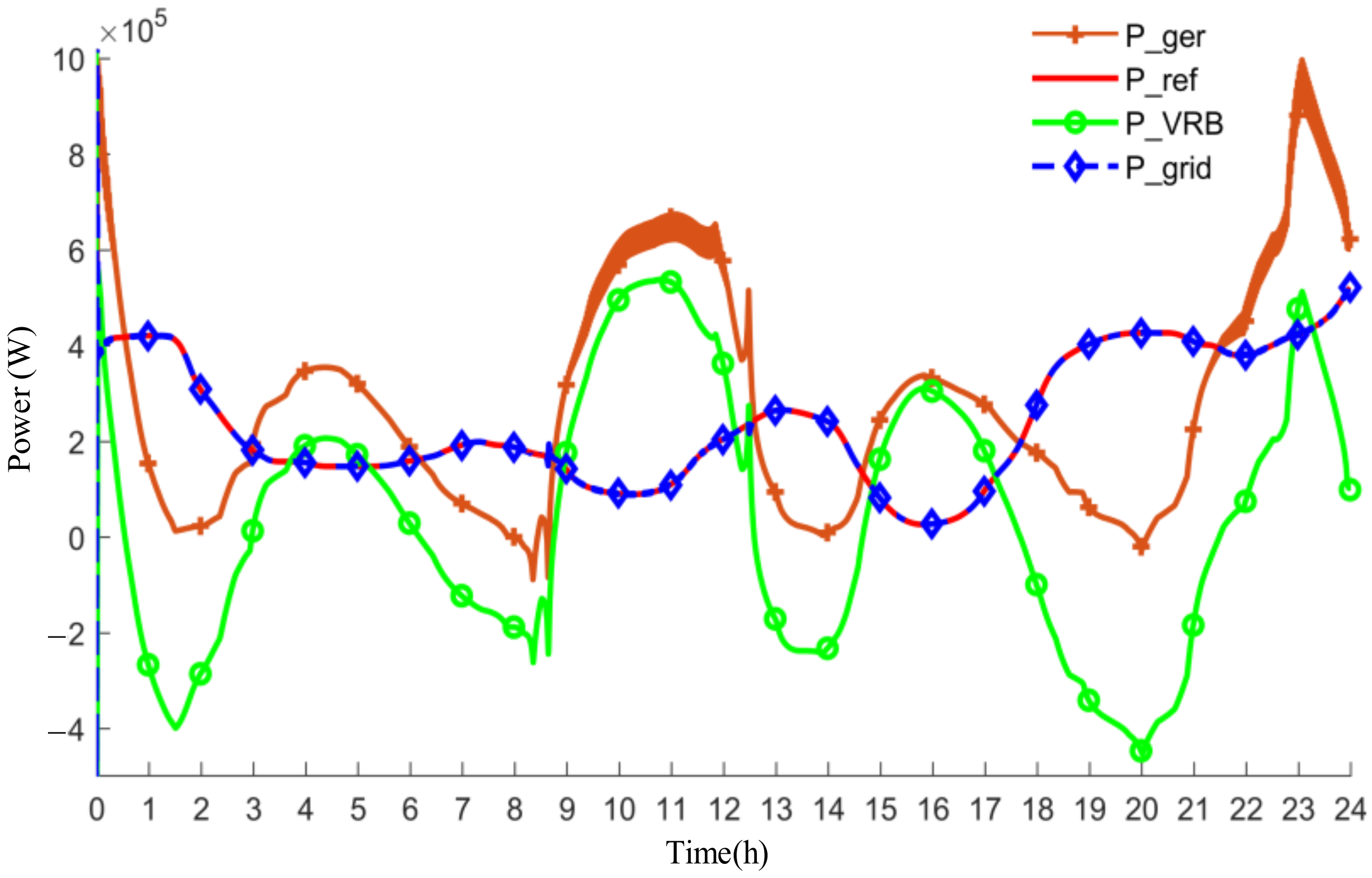
4.1. Simulation Results Based on Conventional Control Strategy
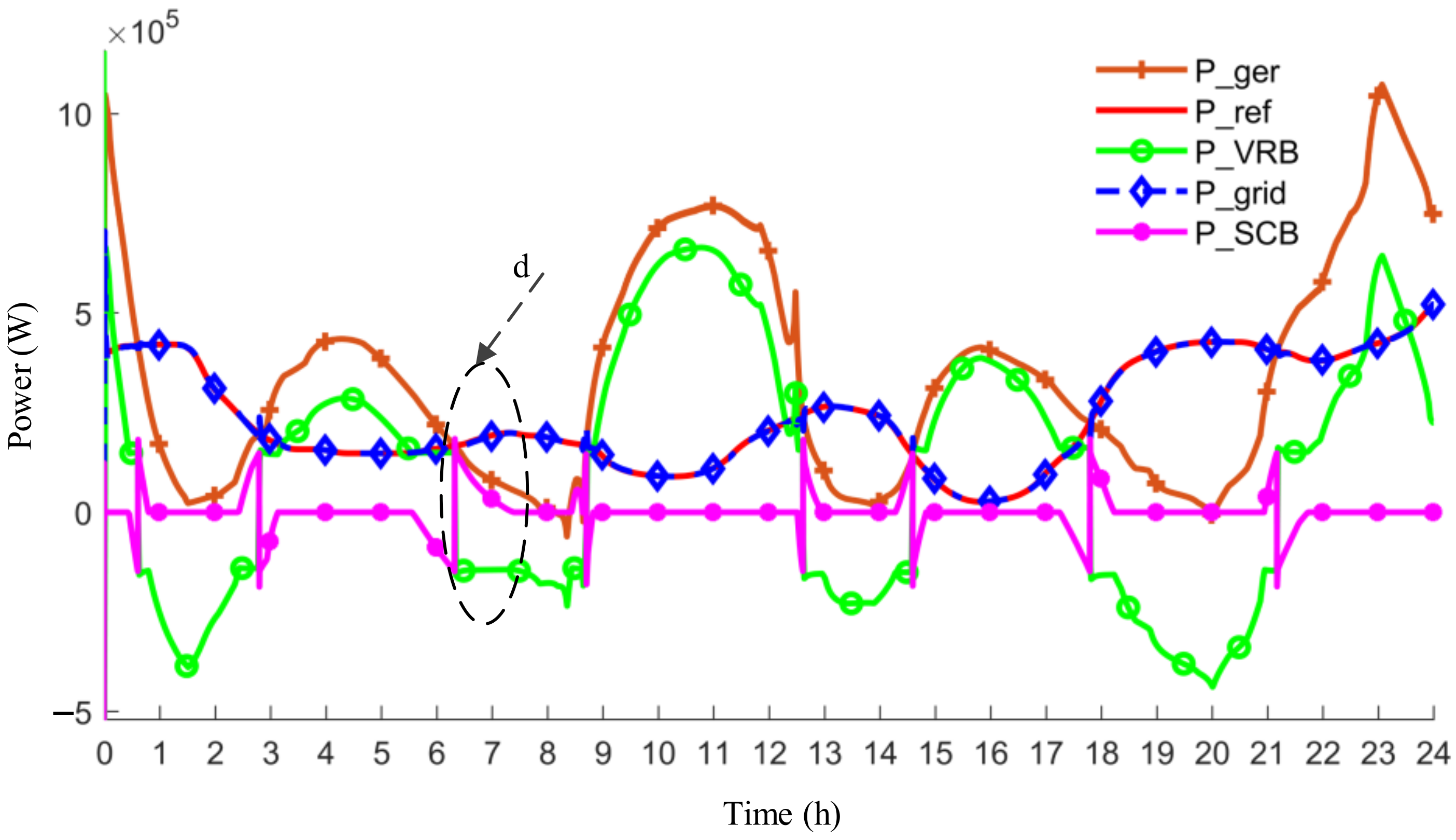
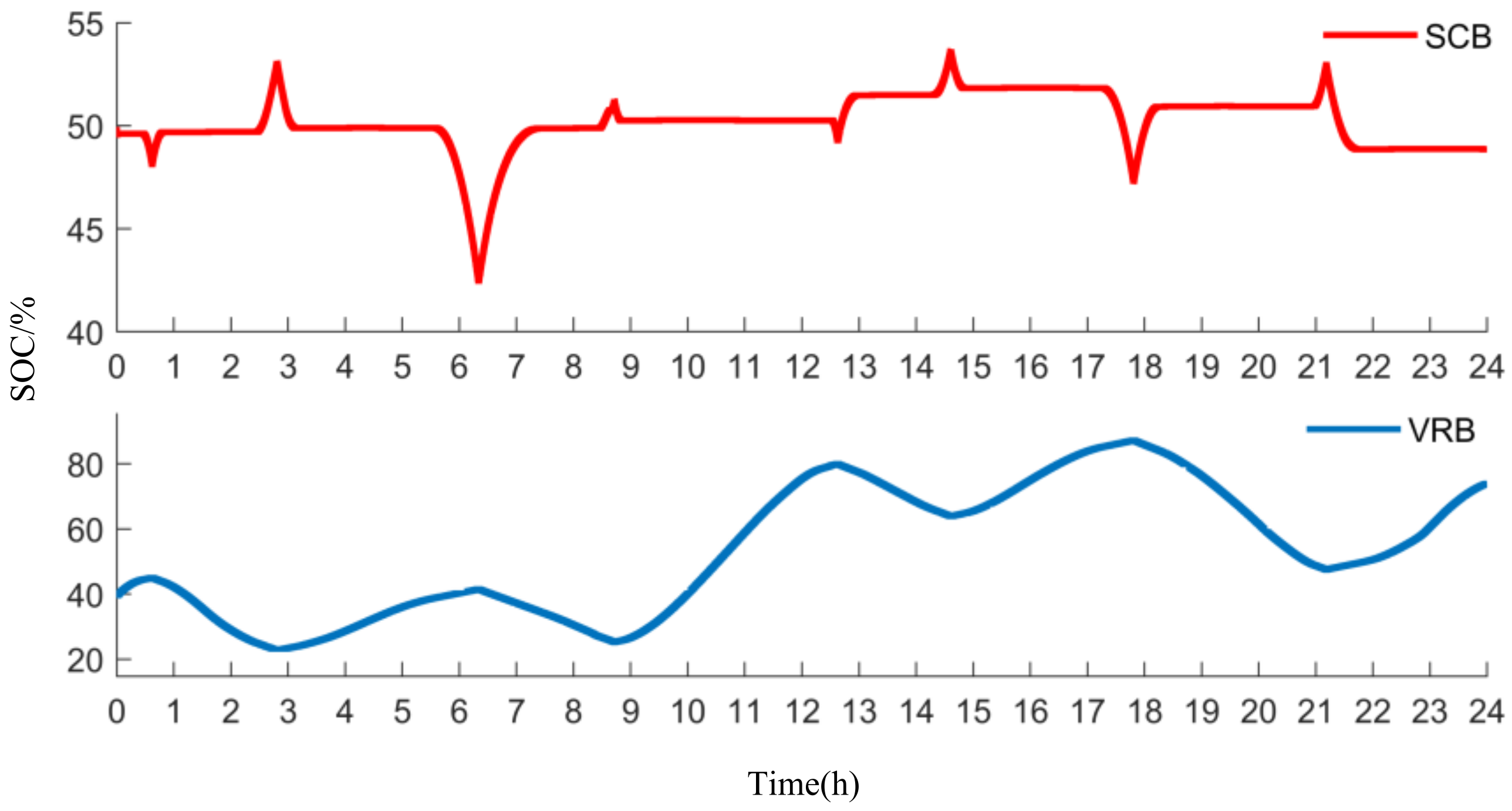
4.2. Simulation Results Based on Rule-based Control Strategy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order Number | Parameters | Values |
|---|---|---|
| 1 | R | 9 m (space) |
| 2 | Rs | 0.008 Ω |
| 3 | Ld = Lq | 1.2 mH |
| 4 | 2.46 Wb | |
| 5 | Pole pair number (Pn) | 125 |
| 6 | J | 1.3 × 106 kg.m2 |
| 7 | Rated phase voltage of PMSG | 690 V (RMS) |
| 8 | Rated phase current of PMSG | 1600 A (RMS) |
| 9 | Rated voltage of MSC and GSC | 690 V (RMS) |
| 10 | Rated current of MSC and GSC | 3320 A (RMS) |
| 11 | Rfixed | 54 Ω |
| 12 | Rrea | 0.14 Ω |
| 13 | Rres | 0.09 Ω |
| 14 | Cele | 5.6 mF |
| 15 | Rg | 0.1 mΩ |
| 16 | Lg | 1.5 mH |
| 17 | ωg | 100π Hz |
| 18 | Kp1 | 7.6 |
| 19 | Ki1 | 883 |
| 20 | Kp2 | 0.6 |
| 21 | Ki2 | 0.8 |
| 22 | ΔI1 | 100 A |
| 23 | ΔI2 | −100 A |
References
- Chen, H.; Tang, T.; Aït-Ahmed, N.; Benbouzid, M.E.H.; Machmoum, M.; Zaïm, M.E. Attraction, Challenge and Current Status of Marine Current Energy. IEEE Access. 2018, 6, 12665–12685. [Google Scholar] [CrossRef]
- Zhou, Z.; Scuiller, F.; Charpentier, J.F.; Benbouzid, M.E.H.; Tang, T. Power Smoothing Control in a Grid-Connected Marine Current Turbine System for Compensating Swell Effect. IEEE Trans. Sustain. Energy 2013, 4, 816–826. [Google Scholar] [CrossRef] [Green Version]
- Aznavi, S.; Fajri, P.; Asrari, A.; Sabzehgar, R. Energy Management of Multi-Energy Storage Systems Using Energy Path Decomposition. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, Baltimore, MD, USA, 29 September–3 October 2019; pp. 5747–5752. [Google Scholar]
- Barchi, G.; Miori, G.; Moser, D.; Papantoniou, S. A Small-Scale Prototype for the Optimization of PV Generation and Battery Storage through the Use of a Building Energy Management System. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe, Palermo, Italy, 12–15 June 2018; pp. 1–5. [Google Scholar]
- Gu, Y.J.; Lin, Y.G.; Xu, Q.K. Blade-pitch system for tidal current turbines with reduced variation pitch control strategy based on tidal current velocity preview. Renew. Energy 2018, 115, 149–158. [Google Scholar] [CrossRef]
- Whitby, B.; Ugalde-Loo, C.E. Performance of Pitch and Stall Regulated Tidal Stream Turbines. IEEE Trans. Sustain. Energy 2014, 5, 64–72. [Google Scholar] [CrossRef]
- Gu, Y.J.; Yin, X.X.; Liu, H.W. Fuzzy terminal sliding mode control for extracting maximum marine current energy. Energy 2015, 90, 258–265. [Google Scholar] [CrossRef]
- Benelghali, S.; Benbouzid, M.E.H.; Charpentier, J.F.; Ahmed-Ali, T.; Munteanu, I. Experimental Validation of a Marine Current Turbine Simulator: Application to a Permanent Magnet Synchronous Generator-Based System Second-Order Sliding Mode Control. IEEE Trans. Ind. Electron. 2011, 58, 118–126. [Google Scholar] [CrossRef] [Green Version]
- Borhan, H.; Vahidi, A.; Phillips, A.M.; Kuang, M.L.; Kolmanovsky, I.V.; di Cairano, S. MPC-Based Energy Management of a Power-Split Hybrid Electric Vehicle. IEEE Trans. Control Syst. Technol. 2012, 20, 593–603. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, C.; Hu, X.; Lin, X.; Zhang, Y.; Li, W. An MPC-Based Control Strategy for Electric Vehicle Battery Cooling Considering Energy Saving and Battery Lifespan. IEEE Trans. Veh. Technol. 2020, 69, 14657–14673. [Google Scholar] [CrossRef]
- Bonab, S.A.; Emadi, A. MPC-Based Energy Management Strategy for an Autonomous Hybrid Electric Vehicle. IEEE Trans. Ind. Appl. 2020, 1, 171–180. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, R.; Zhao, J. Output power smoothing control for the PMSG based wind farm by using the allocation of the wind turbines. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems, Sydney, NSW, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Feng, Z. Energy Management Strategy of Microgrid Based on Fuzzy Control. In Proceedings of the 2018 2nd IEEE Advanced Information Management Communicates Electronic and Automation Control Conference, Xi’an, China, 25–27 May 2018; pp. 1667–1670. [Google Scholar]
- Dou, C.; Yue, D.; Li, X.; Xue, Y. MAS-Based Management and Control Strategies for Integrated Hybrid Energy System. IEEE Trans. Ind. Inform. 2016, 12, 1332–1349. [Google Scholar] [CrossRef]
- Chang, J.; Jia, S. Modeling and application of wind-solar energy hybrid power generation system based on multi-agent technology. In Proceedings of the 2009 International Conference on Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009; pp. 1754–1758. [Google Scholar]
- Liu, Z.; Høidalen, H.K. A simple multi agent system based adaptive relay setting strategy for distribution system with wind generation integration. In Proceedings of the 13th International Conference on Development in Power System Protection, Edinburgh, UK, 7–10 March 2016; pp. 1–6. [Google Scholar]
- Llerena-Pizarro, O.; Proenza-Perez, N.; Tuna, C.E.; Silveira, J.L. A PSO-BPSO Technique for Hybrid Power Generation System Sizing. IEEE Lat. Am. Trans. 2020, 18, 1362–1370. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F.; Bhaskar, M.S. An Experimental Estimation of Hybrid ANFIS–PSO-Based MPPT for PV Grid Integration Under Fluctuating Sun Irradiance. IEEE Syst. J. 2020, 14, 1218–1229. [Google Scholar] [CrossRef]
- Cheng, S.; Su, G.; Zhao, L.; Huang, T. Dynamic dispatch optimization of microgrid based on a QS-PSO algorithm. J. Renew. Sustain. Energy 2017, 9, 045505. [Google Scholar] [CrossRef]
- Zang, T.; Wang, Y.; Sun, H.; He, Z. Variable parameter Kalman filter based dynamic harmonic state estimation for power systems with wind energy integration. In Proceedings of the 2017 IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 26–28 November 2017; pp. 1–5. [Google Scholar]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access. 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Anagnostou, G.; Pal, B.C. Derivative-Free Kalman Filtering Based Approaches to Dynamic State Estimation for Power Systems with Unknown Inputs. IEEE Trans. Power Syst. 2018, 33, 116–130. [Google Scholar] [CrossRef]
- Daus, P.; Biskup, F.; Riedelbauch, S. Performance prediction of a tidal in-stream current energy converter and site assessment next to Jindo, South Korea. J. Renew. Sustain. Energy 2015, 7, 061707. [Google Scholar]
- Bensalah, A.; Benhamida, M.A.; Barakat, G.; Amara, Y. Large wind turbine generators: State-of-the-art review. In Proceedings of the 2018 XIII International Conference on Electrical Machines, Alexandroupoli, Greece, 3–6 September 2018; pp. 2205–2211. [Google Scholar]
- Wang, Y.; Yu, M.; Li, Y. Improved multi-objective model predictive control of permanent magnetic synchronous generator wind power system. J. Renew. Sustain. Energy 2015, 7, 053104. [Google Scholar] [CrossRef]
- Chiniforoosh, S. Definitions and Applications of Dynamic Average Models for Analysis of Power Systems. IEEE Trans. Power Deliv. 2010, 25, 2655–2669. [Google Scholar] [CrossRef]
- Sufyan, M.; Rahim, N.A.; Aman, M.M.; Tan, C.K.; Raihan, S.R.S. Sizing and applications of battery energy storage technologies in smart grid system: A review. J. Renew. Sustain. Energy 2019, 11, 014105. [Google Scholar] [CrossRef]
- Li, W.; Joos, G.; Belanger, J. Real-Time Simulation of a Wind Turbine Generator Coupled with a Battery Supercapacitor Energy Storage System. IEEE Trans. Ind. Electron. 2010, 57, 1137–1145. [Google Scholar] [CrossRef]
- Chahwan, J.; Abbey, C.; Joos, G. VRB Modelling for the Study of Output Terminal Voltages, Internal Losses and Performance. In Proceedings of the 2007 IEEE Canada Electrical Power Conference, Montreal, QC, Canada, 25–26 October 2007; pp. 387–392. [Google Scholar]
- Zhou, Z.; Seuiller, F.; Charpentier, J.F.; Benbouzid, M.; Tang, T. Application of flow battery in marine current turbine system for daily power management. In Proceedings of the 2014 First International Conference on Green Energy, Sfax, Tunisia, 25–27 March 2014; pp. 8–13. [Google Scholar]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. Energy storage technologies for smoothing power fluctuations in marine current turbines. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1425–1430. [Google Scholar]
- Xu, Q. Research on Load Analysis and Control for Horizontal Axis Marine Current Turbine. Ph.D. Thesis, Zhejiang University, Zhejiang, China, 2018. [Google Scholar]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Li, X.; Tang, T. Energy Management Using a Rule-Based Control Strategy of Marine Current Power System with Energy Storage System. J. Mar. Sci. Eng. 2021, 9, 669. https://doi.org/10.3390/jmse9060669
Han J, Li X, Tang T. Energy Management Using a Rule-Based Control Strategy of Marine Current Power System with Energy Storage System. Journal of Marine Science and Engineering. 2021; 9(6):669. https://doi.org/10.3390/jmse9060669
Chicago/Turabian StyleHan, Jingang, Xu Li, and Tianhao Tang. 2021. "Energy Management Using a Rule-Based Control Strategy of Marine Current Power System with Energy Storage System" Journal of Marine Science and Engineering 9, no. 6: 669. https://doi.org/10.3390/jmse9060669
APA StyleHan, J., Li, X., & Tang, T. (2021). Energy Management Using a Rule-Based Control Strategy of Marine Current Power System with Energy Storage System. Journal of Marine Science and Engineering, 9(6), 669. https://doi.org/10.3390/jmse9060669